LAB1IMPRIMIR
28
página 1.1 OBJETIVOS. -Realizar el montaje y medición de los sistemas lineales de: primer segundo, tercer y cuarto orde n realizando físicamente mediante amplificadores opera cionales (A.O), aplicando el computador analógico. - Otener el modelo matem!tico de los sistemas lineales de: primer, segundo tercer y cuarto orden en forma analítica. "Ose r#ar el c omport amiento de la respuesta de los sistemas para un ingreso esc alón, entrada sinusoidal, triangular y cuadrada$ midiendo los tiempos y constantes característicos en ase a la tarjeta de ad%uisición de datos (&A') *-+, *A/ AR& de Ad#antec0. -1dentificar los par!metros (a2, a, a,3, an y 2, , ,3, m) de las func iones de transferencia de los sistemas propuestos, mediante el soft4are 5167A 8 9 y la tarjeta de Ad%uisición de datos *-+. 1.2 FUND AMENTO TEORICO. *os modelos de sistemas de control de par!metros concentrados, deterministicos, continuos lineales, tiempo in#ariante, de sistemas el;ctricos, mec!nicos, 0idr!ulicos, t;rmicos y otros, en general tienen la misma forma de ecuaciones diferenciales y pueden ser clasificados de primer orden, segundo orden, tercer orden y órdenes superiores en relación directa con el orden de la deri#ada. <l montaje de los sistemas de primer orden, segundo orden, tercer orden y cuarto orden, se realizara en el computador analógico constituido por amplificadores operacionales, con los cuales se puede realizar las operaciones de amplificación, suma, resta integración, deri#ación, multiplicación, di#isión y e=tracción de raíz cuadrada. *os amplificadores operacionales se a limentan con una tensión >?. @na de sus características su alta impedancia de ingreso, #ienen en circuitos integrados &1 + *BC, cu!druple amplificador operacional *DC. Asimismo en este laora torio se estudi ara la ap licación de la ta rjeta d e ad%u isición de datos &A' * + , tarjeta de cone= ión de seEales d igitales y analógicas de entrada y salida (1FO) *& B+2 el soft4 are 5167A 8 9, para oser#ación del
-
Upload
selena-zepita -
Category
Documents
-
view
216 -
download
0
description
laboratorio numero 1
Transcript of LAB1IMPRIMIR

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 1/28
página
1.1 OBJETIVOS.
-Realizar el montaje y medición de los sistemas lineales de: primer segundo, tercer
y cuarto orden realizando físicamente mediante amplificadores operacionales
(A.O), aplicando el computador analógico.
- Otener el modelo matem!tico de los sistemas lineales de: primer, segundo tercer
y cuarto orden en forma analítica. "Oser#ar el comportamiento de la respuesta de
los sistemas para un ingreso escalón, entrada sinusoidal, triangular y cuadrada$
midiendo los tiempos y constantes característicos en ase a la tarjeta de
ad%uisición de datos (&A') *-+, *A/ AR& de Ad#antec0.
-1dentificar los par!metros (a2, a, a,3, an y 2, , ,3, m) de las funciones de
transferencia de los sistemas propuestos, mediante el soft4are 5167A8 9 y la
tarjeta de Ad%uisición de datos *-+.
1.2 FUNDAMENTO TEORICO.
*os modelos de sistemas de control de par!metros concentrados, deterministicos,
continuos lineales, tiempo in#ariante, de sistemas el;ctricos, mec!nicos, 0idr!ulicos,
t;rmicos y otros, en general tienen la misma forma de ecuaciones diferenciales y
pueden ser clasificados de primer orden, segundo orden, tercer orden y órdenes
superiores en relación directa con el orden de la deri#ada.
<l montaje de los sistemas de primer orden, segundo orden, tercer orden y cuarto
orden, se realizara en el computador analógico constituido por amplificadores
operacionales, con los cuales se puede realizar las operaciones de amplificación,
suma, resta integración, deri#ación, multiplicación, di#isión y e=tracción de raíz
cuadrada. *os amplificadores operacionales se alimentan con una tensión >?. @na de
sus características su alta impedancia de ingreso, #ienen en circuitos integrados &1 +
*BC, cu!druple amplificador operacional *DC.
Asimismo en este laoratorio se estudiara la aplicación de la tarjeta de ad%uisición de
datos &A' * + , tarjeta de cone=ión de seEales digitales y analógicas de
entrada y salida (1FO) *& B+2 el soft4are 5167A8 9, para oser#ación del

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 2/28
página
comportamiento de la respuesta de los sistemas indicados.
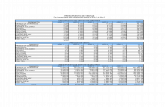
*as características de la tarjeta de ad%uisición de datos &A'+.
<=isten tarjetas muc0o mas a#anzadas como la tarjeta 61 @G/ + de la 6ational
1nstruments, cuyas características t;cnicas m!s importantes son:

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 3/28
página
1.3 DESARROLLO.
.-&esarrollo para un sistema de H orden con un amplificador operacional. &educción del
modelo matem!tico, solución analítica de los mismos para un ingreso sinusoidal.
*ey de corrientes de Iirc0off en (A)
i1=i
2+i
3 33333333333.()
*ey de corrientes de Iirc0off en (/)
i3=i
4+i
5 33333333333.()

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 4/28
página
Gaemos %ue
+¿=0
−¿=v¿
v¿
333333(J)
Kallando las corrientes y aplicando la condición (J)
Remplazando en las ecuaciones en y
Aplicando la transformada de *a place L y L
&e la ecuacion LL despejamos ? A(s)

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 5/28
página
&e la ecuación LL despejamos ? A(s)
1gualando *as ecuaciones D y C
Kacienda operaciones se tiene
*a función de transferencia (s) es :
Remplazando en (s) los siguientes datos:
*a función de transferencia de segundo orden es :
Gi la entrada es :
Aplicando la pransformada de la place en 7
&espejando la salida se tiene
Remplazando 7L en /

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 6/28
página
7inalmente se tiene
Aplicando fracciones parciales
7inalmente aplicando la transformada in#ersa de *a place se tiene
raficando se tiene:
.-<jecucion en forma pr!ctica del circuito de un sistema de segundo orden en el computadoranalógico .utilizando los siguientes #alores de resistencias y capacitancias RM22N, MC,B 7MP7
fotos del circuito armado
D. ara el sistema de segundo orden con un A.. 1ntroduciendo un ingreso de ->? de
amplitud. on la ayuda de la tarjeta de ad%uisición de datos * +, las aplicaciones
/OR1G e 1&A del 4infat 9 determinanamos: el comportamiento de la respuesta y el
modelo matem!tico m!s adecuado. Realizando #arias prueas y eligiendo el mejor.las
cone=iones del computador analógico y &A' se deen realizar como se aprecia en lasiguiente figura. *as graficas del comportamiento y modelo matem!tico est!n adjuntas al
informe.
Aplicación ( /oris)

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 7/28
página
Aplicaciones (1&A)

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 8/28
página
GeEales de entrada y salida del sistema
Otencion de los coeficientes del sistema

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 9/28
página
&onde se otu#o los siguientes datos 33falta datos y
3333333333333333
comparar33333333333333333333333.. C.- Realizacion en el
5infact 9 aplicación /OR1G, el siguiente diagrama para la ad%uisición de datos.
>.- ?ariando los #alores de resistencia R capacitancias y $ con estos #alores
determinamos la respuesta y el modelo matem!tico para un ingreso escalón de ->?.
(Realizando por lo menos C #ariaciones).

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 10/28
Univ: León Ramírez página
.-on los #alores de RM22N, MC,B 7 MP7, en el circuito del sistema de segundo
orden con un A.O.mediante un generador de seEales, se introdujo una seEal sinusoidal,
onda cuadrada y onda triangular con un pico m!=imo de >? y la frecuencia adecuada
(fM2.>Kz).on a tarjeta de ad%uisición de datos determinamos y oser#amos el
comportamiento de la salida. Asimismo, 0allamos en forma manual la respuesta analítica de
los mismos.
GeEal senoidal
Aplicación ( /oris)
Aplicaciones (1&A)

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 11/28
Otencion de los coeficientes del sistema

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 12/28

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 13/28
GeEal triangular
Aplicación (/oris)
Aplicaciones (1&A)

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 14/28

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 15/28
Otención de los coeficientes del sistema
GeEal onda
cuadrada
Aplicación (/oris)
Aplicaciones (1&A)
Otención de los coeficientes del sistema
1.4 CUESTIONARIO.
.- ¿halle el modelo maem!"#o e$ %o&ma a$al'"#a del ("(ema a(")$ado al )&*+o
+a&a el "$)&e(o e(#al,$ de am+l"*d -V / el "$)&e(o de o$da ("$*(o"dal de
am+l"*d m!0"ma de V/ %&e#*e$#"a de .
?e a se el desarrollo

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 16/28
2.- ¿"$5e(")*e la #la("%"#a#",$ m!( #om+lea de lo( ("(ema( de #o$&ol l"$eale( / $o
l"$eale(.
*os sistemas de control se clasifican en sistemas de lazo aierto y a lazo cerrado
a Gistema en lazo aierto:
*a #ariale controlada o de salida no se mide, ni se utiliza para modificar la entrada. *aentrada a la planta no es función de la salida como ocurría en lazo cerrado. Ge empleanormalmente cuando las perturaciones sore el sistema son pe%ueEas y tenemos unuen modelo de planta.
8ami;n se utiliza este tipo de sistemas si la seEal de salida del sistema es imposile omuy difícil de medir.
)alentador <l;ctrico
<ntrada: decisión de
prender o apagar
Galida: camio
de temperatura1nterruptor
Alimentación
el;ctrica
F"). 1.2. Gistema de lazo aierto (&./.)
Gistema en lazo cerrado:
*a #ariale controlada se mide y se utiliza esa medición para modificar la entrada sorela planta. <sa medida se lle#a a cao normalmente por un sensor. <stos sistemas decircuito cerrado usan la retroalimentación desde un resultado final para ajustar laacción de control sore la planta.

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 17/28
F"). 1.3. Gistema de lazo cerrado (&./.).
Ta6la 1.1. aracterísticas de los sistemas de lazo aierto y lazo cerrado:
lasificación de Gistemas de control en lazo cerrado:
• GegQn la característica temporal de la ley de control:
Gi se atiende a la #arianza en el tiempo de la ley de control se puede distinguir:
ontrol fijo o est!ndar. *os par!metros de la ley de control no #arían en el tiempo. <sinteresante cuando las leyes del actuador y de la planta son fijas. omo ya se 0a pintado, sellama control rousto a a%uel %ue funciona correctamente ante errores en la modelización dela planta.
• GegQn el nQmero de entradas y salidas
Gi se atiende al nQmero de entradas y de salidas %ue posee el sistema se puede distinguir:
S"(ema SISO (single input, single output). osee una Qnica entrada y una salida. S"(ema MIMO (multiple input, multiple output). osee #arias entradas y #arias salidas.
• GegQn la linealidad del sistema
Gi se atiende a la linealidad del sistema se puede distinguir:Gistemas lineales. *as ecuaciones diferenciales %ue descrien al sistema, tanto a la plantacomo al controlador, son lineales.Gistemas no lineales . *as ecuaciones diferenciales %ue descrien al sistema no son lineales.@nas #eces es la planta %ue no es lineal y otras #eces es el controlador el %ue no es lineal.
• GegQn la continuidad del sistema
Gi se atiende a la continuidad del sistema se puede distinguir:Gistemas continuos . ontinuamente ajusto a la ley de control, es un control en todo instante.Gistemas discretos . Ajusto a la ley de control a oser#aciones discretas. Amos sistemaspermiten un an!lisis similar en caso de %ue el tiempo de muestreo sea muc0o m!s r!pido %uela planta.

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 18/28
3.-&eal"#e *$a am+l"a e0+l"#a#",$7 de lo( #o$#e+o( de la &e(+*e(a &a$("o&"a / la
&e(+*e(a +e&ma$e$e.
Antes de %ue un circuito o ma%uina pueda llegar a una situación de r;gimen
permanente o estacionario, el sistema pasa por un periodo de transición durante el
cual las tensiones y corrientes #arían en función del tiempo, 0asta llegar a una
situación de e%uilirio determinado por los par!metros del sistema.
<l periodo de tiempo necesario para %ue las tensiones y corrientes alcancen el r;gimen
estacionario o permanente se denomina eriodo 8ransitorio.
&urante este periodo transitorio las e=presiones matem!ticas in#olucradas contienen
t;rminos distintos de las componentes estacionarias ya #istas.
<stas componentes son los t;rminos propios naturales o lires y son en general de
corta duración, siendo amortiguados por factores e=ponenciales decrecientes %ue
dependen de los par!metros del circuito.
<stos fenómenos transitorios e=isten durante los periodos de cone=ión, descone=ión y
conmutación en un sistema el;ctrico y es precisamente durante este periodo de corta
duración donde se presentan los prolemas de funcionamiento m!s serios de un
circuito o ma%uina el;ctrica.
<=isten al menos dos formas principales de resol#er un circuito el;ctrico en r;gimen
transitorio.
<l ;todo l!sico realiza el an!lisis transitorio resol#iendo ecuaciones diferenciales
%ue resultan de aplicar las leyes de Nirc00off al circuito y determinando las constantesde integración %ue resultan de aplicar las condiciones iniciales del sistema.
<ste m;todo se aplica a sistemas sencillos representados por ecuaciones diferenciales
de primer y segundo orden.

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 19/28
ara sistemas m!s complejos se emplea la denominada 8ransformada de *aplace.
<sta es una 0erramienta matem!tica %ue permite transformar las funciones
dependientes del tiempo en otras funciones %ue dependen de la frecuencia compleja
del tipo M S T U @na #ez con#ertidas las ecuaciones diferenciales por este m;todo
a ecuaciones dependientes de la frecuencia, estas se resuel#en en forma algeraica,
con la #entaja de %ue las condiciones iniciales del circuito %uedan incorporadas
autom!ticamente. *uego se aplica la 8ransformada 1n#ersa de *aplace y se lle#an las
ecuaciones otenidas al dominio original del tiempo.
&el ;todo l!sico se otienen ecuaciones diferenciales de primer y segundo orden
de la forma:
&onde % M )( representa una tensión, una corriente o una carga$ es la
corriente o tensión de e=citación del sistema$ a, y c son coeficientes constantes y t es
el tiempo.
*as ecuaciones anteriores se denominan <cuaciones &iferenciales *ineales deido a
%ue los coeficientes %ue aparecen en cada t;rmino son constantes y no son una
función de la #ariale dependiente .
*a solución de este tipo de ecuaciones se compone de dos t;rminos:
<l primero de ellos es la solución general %ue se otiene cuando M 2, no e=iste
e=citación en el sistema y se denomina Respuesta 6atural, ropia o *ire del sistema.
Representa la respuesta del circuito cuando se eliminan los generadores e=istentes y la
energía puesta en juego en el sistema es la almacenada en los elementos 1nducti#os y

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 20/28
capaciti#os del circuito.
<l segundo t;rmino, o solución particular, depende del tipo de e=citación aplicada al
circuito y se denomina Respuesta 7orzada del sistema, ya %ue depende de la forma en
particular de la forma de onda de la fuente de e=citación aplicada.
&e lo anterior se desprende %ue la solución completa a una ecuación diferencial lineal
es de la forma:
*a respuesta natural contiene las constantes de integración de la ecuación diferencial
correspondiente. <n los circuitos pasi#os %ue contienen resistencias la respuesta
natural es del tipo amortiguada, y se caracteriza por t;rminos e=ponenciales decrecientes.
&espu;s de un cierto tiempo estos t;rminos e=ponenciales se pueden
considerar despreciales %uedando como Qnica respuesta del sistema la solución
particular y se dice %ue se 0a alcanzado el r;gimen permanente.
ientras %ue la respuesta natural no sea despreciale se dice %ue el circuito funciona
en r;gimen transitorio.
*a respuesta forzada no contiene constantes de integración aritrarias ya %ue est!n
definidas por la e=citación correspondiente.
ara determinar las constantes de integración de la respuesta compuesta, %ue est!n
presentes en la respuesta natural es necesario conocer el estado del circuito en algQn
instante de tiempo. <n la pr!ctica este instante se corresponde con el momento de la
cone=ión o descone=ión de la fuente de e=citación presente en el circuito. ara los
fines de estudio estos e#entos se producen en t M
<l estado pre#io a este M 2 se define conociendo la tensión presente en los
elementos capaciti#os y la corriente en los inducti#os y se denominan ondiciones
1niciales.

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 21/28
4.-8*e (o$ lo( ("(ema( $o l"$eale(7 &eal"a& *$a e0+l"#a#",$ de lo( m"(mo(
"$#l*/e$do 2 e9em+lo( de +&o#e(o( $o l"$eale(.
S"(ema( l"$eale(
<n matem!ticas una función lineal es a%uella %ue satisface las siguientes propiedades.
Va %ue en un sistema tiene %ue poner en conjunto de dos o m!s ecuaciones.
. Aditi#idad:
. Komogeneidad:
<stas dos reglas tomadas en conjunto se conocen como rincipio de superposición.
S"(ema( $o l"$eale(
*as ecuaciones no lineales son de inter;s en física y matem!ticas deido a %ue la mayoría delos prolemas físicos son implícitamente no lineales en su naturaleza.
@na ecuación no lineal es una ecuación de la forma:
ara algQn #alor desconocido de .
*as ecuaciones no lineales son muc0o m!s complejas, y muc0o m!s difíciles de entender porla falta de soluciones simples superpuestas. ara las ecuaciones no lineales las solucionesgeneralmente no forman un espacio #ectorial y, en general, no pueden ser superpuestas paraproducir nue#as soluciones. <sto 0ace el resol#er las ecuaciones muc0o m!s difícil %ue ensistemas lineales.
El #o$&ol $o l"$eal recie su nomre del tipo de sistema (no lineal) sore el %ue se %uieren

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 22/28
saer ciertas #ariales. uando te encuentras ante un sistema con ecuaciones no lineales %uedefinen su comportamiento y pretendes lle#ar el mismo 0acia unas condiciones defuncionamiento estas realizando un control no lineal.
CONTROL DENIVE DE LI:UIDOS
8enemos estas ecuaciones:

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 23/28
q−q1=C 1d h1
dt ()
q1= 1
R1(h1−h2) ()
q1−q2=C 2 d h2
dt (D)
q2= 1
R2h2 (C)
Realizando la transformada de *aplace en las ecuaciones al C tenemos:
H 1 ( s)= 1
C 1 s Q (s )−
1
C 1 s Q1 ( s) (W)
Q1 ( s)= 1
R1 H 1 ( s)− 1
R1 H 2 ( s ) (W)
H 2 ( s)=1
C 2 sQ 1 (s )−
1
C 2 sQ2 (s ) (DW)
Q2 ( s)= 1
R2 H 2 ( s ) (CW)
<nsamlando y resol#iendo por asson o por lo%ues llegamos a la siguiente función detransferencia de este sistema.
Q 2(s)Q(s)
= 1
( R1 R2C 1C 2 ) s2+ ( R2C 2+ R2C 1+ R1C 1) s+1
onsidere el sistema din!mico no-lineal %ue descrie un p;ndulo simple.
()

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 24/28
.-"$5e(")*e +o& lo me$o( do( (o%;a&e 8*e +e&m"e$ ("m*la& lo( #"&#*"o(
*"l"ado( e$ 6a(e a lo( am+l"%"#ado&e( o+e&a#"o$ale(.
:UCS
:*#( es un soft4are multiplataforma, para *inu=, ac OG y 5indo4s.

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 25/28
'ucs, es tami;n conocido con el nomre de :*"e U$"5e&(al C"&#*" S"m*lao& , es un
e=celente S"m*lado& )&!%"#o de #"&#*"o( ele#&o$"#o(, de código aierto (soft4are lire)
%ue nos #a a ayudar a simular circuitos electrónicos simples o astantes complejos en
nuestro sistema.
on 'ucs puedes crear un circuito mediante una sencilla interfaz gr!fica y simular su
comportamiento en pe%ueEa seEal, o gran seEal. @na #ez %ue la simulación terminepuede #er sus resultados en una p!gina de presentación o en una #entana.
<ste simulador incluye una ase de datos %ue contiene todos los componentes y
dispositi#os electrónicos %ue son necesarios para diseEar nuestro circuito electrónico$
diodos, fuentes de tensión y corriente, capacitadores, resistencias, transistores,
amplificadores operacionales, etc.
CIRCUIT MA<ER
<ste soft4are tami;n puede simular todo tipo de circuitos como el spice, aun%ue lasgr!ficas en el tiempo de las seEales de #oltaje yFo corriente son un poco limitadas. <ntreestas características est! la de poder simular el comportamiento de los A.O.
Analizaremos el circuito de primer orden de A.O.
*a grafica de la salida es:
omo se puede oser#ar tampoco se puede 0acer un uen an!lisis d la respuesta en el

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 26/28
tiempo con esta gr!fica puesto %ue la salida esta desde 2 segundos en casi D #oltios.
=. U"l"#e *$ a("(e$e de ("(ema( de #o$&ol +a&a 5e&"%"#a& / #om+a&a& el#om+o&am"e$o de lo( ("(ema( de +&"me&7 (e)*$do7 e&#e& / #*a&o o&de$ >A(")$adoa #ada )&*+o?.
-8raajando con la función de transferencia otenida analíticamente
• *ínea solida purpura representa la seEal de salida del sistema
• *ínea solida amarilla representa la seEal de entrada del sistema
-8raajando con la función de transferencia 0allada con la tarjeta de ad%uisición de datos

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 27/28
•
*ínea solida purpura representa la seEal de salida del sistema• *ínea solida amarilla representa la seEal de entrada del sistema
1. CONCLUSIONES.
1ndi%ue ampliamente las conclusiones del laoratorio realizado.
*uego de realizar y 0allar el modelo matem!tico del sistema de H orden con un
amplificador operacional analíticamente, realizamos la pr!ctica utilizando la tarjeta de
ad%uisición de datos, se armó el circuito en el talero #erificando y analizando la uicación
de los dispositi#os como la resistencia y el capacitor. 8ami;n la tensión de entrada %ue
tiene %ue ser de ->(?),%ue la misma regulamos del potenciómetro leyendo con un
#oltímetro. @na #ez ya armado el circuito, conectamos el mismo con &A' como se indica
en la guía del informe. *uego con el comando 5infact 9 ,/OR1G ,realizamos el diagrama
para la ad%uisición de datos y oser#amos el comportamiento de la tensión de entrada y

7/21/2019 LAB1IMPRIMIR
http://slidepdf.com/reader/full/lab1imprimir 28/28
salida, se realizó #arias #eces esta pruea por%ue al apro=imare gracias al 1&A y saiendo
la información del error. 8omamos como dato la e=periencia %ue tenía menor error %ue es
<M .C+%ue #arias #eces era m!s de >2.luego realízamos las comparaciones de la
solución analítica con la practica en el 5infact 9 1&A donde se otu#o los #alores
3333333333con un error de <M.C+
osteriormente realizamos la captura de la seEales del sistema realizado en forma pr!ctica
en el /OR1G e 1&A donde se comparó la seEal de salida con la gr!fica del modelo
matem!tico donde amas graficas muestran la seEal de un sistema de H orden para un
entrada de ->(?).
7inalmente realizamos mediante un generador de seEales, introducimos una seEal
sinusoidal, onda cuadrada y onda triangular con un pico m!=imo de >? y la frecuencia
adecuada (fM2.>Kz).con la tarjeta de ad%uisición de
datos determinamos y oser#amos el comportamiento de la salida. &onde tomamos como
dato el mejor, el %ue tenía menor error para todos los casos.
BIBLIO@RAFIAXY Natsu0iIo Ogata 16<61<R1A &< O68RO* O&<R6A, cuarta edición. rentice KallKispanoamericana 22D.XY /enjamín . Nuo A@8OA81 O68RO* GVG8<G, septima edición, rentice Kall, 99.XDY 444.ni.comXCY 444.ad#antec0.com