INSTITUTO POLITÉCNICO NACIONAL · 2019. 10. 3. · comunicaciones de espectro disperso de...
109
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN "SIMULACIÓN DEL CANAL DE COMUNICACIONES DE ESPECTRO DISPERSO DE SECUENCIA DIRECTA” T E S I S QUE PARA OBTENER EL GRADO DE MAESTRO EN CIENCIAS EN INGENIERÍA DE TELECOMUNICACIONES P R E S E N T A FRANCISCO RUBÉN CASTILLO SORIA ASESOR: M.C. MIGUEL SÁNCHEZ MERAZ MÉXICO D.F., 2004 i
Transcript of INSTITUTO POLITÉCNICO NACIONAL · 2019. 10. 3. · comunicaciones de espectro disperso de...

INSTITUTO POLITÉCNICO NACIONALESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
SECCIÓN DE ESTUDIOS DE POSGRADO E INVESTIGACIÓN
"SIMULACIÓN DEL CANAL DE
COMUNICACIONES DE ESPECTRO DISPERSO DE SECUENCIA DIRECTA”
T E S I S
QUE PARA OBTENER EL GRADO DE
MAESTRO EN CIENCIAS EN INGENIERÍA DE TELECOMUNICACIONES
P R E S E N T A
FRANCISCO RUBÉN CASTILLO SORIA
ASESOR: M.C. MIGUEL SÁNCHEZ MERAZ
MÉXICO D.F., 2004
i

AGRADECIMIENTOS Quiero agradecer a mi asesor y profesor M.C. Miguel Sánchez, por su guía y apoyo en la
realización de este trabajo. Al comité de sinodales Dr. Vladimir Kazacov, Dr. Vladislav
Kravchenco, M.C. Jorge Sosa, M.C. Marco Acevedo, por su apoyo dentro y fuera del salón
de clases. Agradezco el apoyo recibido por las siguientes instituciones: CONACYT,
TELMEX, Patronato del Estudiante Sudcaliforniano, muy especialmente al Instituto
Politécnico Nacional.
ii

ÍNDICE
OBJETIVO vi RESUMEN vii ABSTRACT viii JUSTIFICACIÓN ix ANTECEDENTES x INTRODUCCIÓN xii LISTA DE TABLAS xiv LISTA DE FIGURAS xv
CAPÍTULO I COMUNICACIONES DE ESPECTRO DISPERSO 1
1.1 Espectro Disperso (SS) 1
1.1.1 Espectro Disperso de Secuencia Directa (DSSS) 3 1.1.2 Margen de Ruido 4 1.1.3 Espectro Disperso por Salto de
Frecuencia (FHSS) 6 1.1.4 Comparación de las Técnicas
de Espectro Disperso 7
1.2 Técnicas de Acceso Múltiple 8
1.2.1 Comparación de las Técnicas de Acceso Múltiple 8 1.2.2 Espectro Disperso y Acceso Múltiple 10 1.2.3 Acceso Múltiple por División de Código (CDMA) 11 1.2.4 Generación de Códigos Walsh 14 1.2.5 Generación de Secuencias PN 15
1.3 Modulación y Demodulación 16
1.3.1 Representación Vectorial de las Formas de Onda 17 1.3.2 Principios de Receptores Óptimos
iii

para Canales Gaussianos 27 1.3.3 El Receptor de Correlación 30 1.3.4 El Sistema SS-BPSK 33
CAPÍTULO II EL CANAL MÓVIL 36 2 .
2.1 Modelos de Propagación 36
2.1.1 Pérdidas en el Espacio Libre 36 2.1.2 Modelo Empírico de Hata 37
2.2 Modelos de Canales 38
2.2.1 Función Dispersión de Retardo 38 2.2.2 Función de Transferencia en el
Dominio de la Frecuencia 44 2.2.3 Función de Dispersión Doppler 49 2.2.4 Dispersión en Tiempo y Frecuencia Combinadas 51
2.3 Tasa de Desvanecimientos 52
2.3.1 Caracterización del Canal Aleatorio de Desvanecimientos 52
2.3.2 Terminología Utilizada en Desvanecimientos 59
CAPÍTULO III DESCRIPCIÓN DEL SISTEMA 63 3 .
3.1 Consideraciones de Diseño 63 3.2 Estructura General Del Programa 64
3.2.1 El Transmisor 66 3.2.1.1 Secuencias PN 68 3.2.1.2 Códigos Walsh 71 3.2.2 Canal de Comunicaciones 72 3.2.2.1 Ruido 74 3.2.2.2 Desvanecimientos 75 3.2.3 Receptor 77 3.2.4 Estadísticas 78
3.3 Alcances y Limitaciones 79
iv

CAPÍTULO IV APLICACIONES 81
4.1 Interferencia Introducida por Multicanalización en CDMA 81
4.1.1 Planteamiento del Problema 82 4.1.2 Datos de Entrada al Simulador 83 4.1.3 Resultados 83 4.1.4 Conclusiones 86
4.2 Simulación del Desempeño CDMA sobre el Canal RBGA 87
4.3 Simulación del Desempeño CDMA sobre el Canal con Desvanecimientos y RBGA 89
CAPÍTULO V CONCLUSIONES Y TRABAJO FUTURO 91
5.1 Trabajo Futuro 91
BILIOGRAFIA 92
APÉNDICE A, CÓDIGO DEL PROGRAMA (EN CD)
v

OBJETIVO
Desarrollar un software que simule el canal de comunicaciones para el sistema de espectro disperso de secuencia directa.
vi

RESUMEN
La continua búsqueda de mejoras en las técnicas de comunicación y los avances
tecnológicos, dieron pie para que la técnica de acceso a sistemas de radio conocida como
CDMA (Code Division Multiple Access), fuera considerada en el mundo de los sistemas
comerciales. El trabajo realizado consiste en un programa que simula un sistema de
comunicaciones de espectro disperso de secuencia directa aplicado a CDMA. El interés está
centrado en los efectos que el canal de comunicaciones de espectro disperso tiene sobre los
datos transmitidos.
Una trama de 10 bits es transmitida en forma recurrente sobre un canal con ruido,
desvanecimientos lentos e interferencia de acceso múltiple. Dos demoduladores, recuperan
los bits transmitidos y se comparan para calcular la Tasa de Bits Erróneos (BER). Como
resultado se obtienen las estadísticas de la simulación en forma gráfica y numérica.
Se presentan resultados generales del simulador para los canales con Ruido Blanco
Gaussiano Aditivo (RBGA) y con desvanecimientos en condiciones de Interferencia de
Acceso Múltiple (IAM). El simulador desarrollado puede ser una excelente herramienta
para evaluar el desempeño de sistemas de comunicación en CDMA.
vii

ABSTRACT Continuous search of communication improvements and technological advances allowed
the access technique to radio systems known as CDMA (Code Division Multiple Access),
was considered in the world of the commercial systems. The present work consists of
software that simulates a direct sequence spread spectrum communications system applied
by CDMA. The interest is focused on the effects that the communication channel has on the
transmitted data.
The information is transmitted in a recurrent 10-bit frame through a noisy and
fading channel which has Multiple Access Interference (MAI). Two demodulators recover
transmitted bits in order to compare and calculate the Bit Error Rate (BER). Statistical
results of the simulation in graphical and numerical form are obtained.
General results of the simulator for Additive White Gaussian Niose (AWGN) and
fading channels in multiple access conditions (MAI) appear. The simulator developed could
be an invaluable tool for investigating the design and implementation of CDMA systems.
viii

JUSTIFICACIÓN
El adecuado diseño de sistemas de comunicación comprende el análisis, simulación y
pruebas de campo, como herramientas que permitan prever el comportamiento del mismo.
El objetivo principal es obtener una mayor eficiencia en la implementación del sistema.
Cuando se trata de una red celular, generalmente debe avanzarse en el análisis tanto
como sea posible y después aprovechar los beneficios que representa el procesamiento de
datos en una computadora. Además pueden realizarse algunas mediciones de campo, para
verificar los cálculos.
El simulador es una herramienta que permite variar algunos parámetros del sistema
de comunicaciones y evaluar su desempeño, permitiendo optimizar el tiempo de diseño
del sistema sin necesidad de excesivas pruebas de campo. Por otro lado se pueden simular
procesos aleatorios específicos y obtener resultados después de numerosos cálculos. Se
debe aprovechar aquí, la tecnología de los procesadores más rápidos disponibles.
El canal de comunicación es una de las principales características a tomar en cuenta
en la simulación de un sistema con tecnología CDMA. El simulador que aquí se presenta
considera aspectos como: la atenuación, el ruido, los desvanecimientos lentos y la
interferencia que causan varios transmisores operando simultáneamente. Se considera
también el modelado de canales para distintos códigos ortogonales. Todos los parámetros
del canal pueden ser manipulados, para obtener en el receptor la correspondiente tasa de
bits erróneos.
ix

ANTECEDENTES Con el inicio de los sistemas de comunicación celular de primera generación en la década
de los ochentas, se empezaron a desarrollar también técnicas de diseño de sistemas
celulares. El uso de computadoras para el diseño de este tipo de sistemas ha llegado a
convertirse en la primera opción entre los que a eso se dedican.
Existen básicamente tres formas de obtener una solución al problema de diseño en
sistemas celulares, estas son:
Mediciones de campo
Modelos matemáticos
Herramientas de software
La forma de obtener resultados con más precisión es sin duda la medición de
campo. Para la evaluación del sistema, por ejemplo pueden trazarse radiales a una antena
sobre un terreno irregular y obtener su patrón de radiación. Este tiene la desventaja del
tiempo y los recursos que se requieren para evaluar una característica del sistema.
También puede realizarse un cálculo mediante modelos matemáticos y obtener una
predicción del comportamiento de alguna característica del sistema. Nos gustaría que las
herramientas matemáticas nos dieran más información sin embargo, cuando se trata con
varios fenómenos aleatorios el problema se torna muy complejo. Sabemos por ejemplo que
las fórmulas para predicción de pérdidas en sistemas celulares son de origen empírico.
Otra posibilidad la brindan las herramientas de software, donde la gran capacidad de
procesamiento de una computadora puede realizar los cálculos y después desplegar
resultados en forma gráfica. Podemos también realizar una simulación que nos permita
observar el comportamiento de algunos subsistemas en condiciones muy cercanas a las
reales.
Aunque una computadora puede tardar varias horas en resolver para un diseño
específico, las herramientas de software son hoy en día la solución más popular entre los
x

diseñadores de sistemas celulares, pero no se debe descartar la posibilidad de utilizar una
combinación de los tres métodos. Por ejemplo puede utilizarse la herramienta de software,
para descartar posibilidades y utilizar mediciones de campo a las mejores opciones, a partir
de las cuales se tomará la decisión final.
xi

INTRODUCCIÓN
Es difícil imaginar un mundo moderno sin la presencia de la computadora. En la
actualidad, la mayoría de los procesos son más eficientes gracias al uso de esta herramienta.
El uso de computadoras para la simulación de sistemas es un área que cada vez toma
mayor importancia, dentro de esta rama, la simulación de sistemas de comunicaciones, ha
llegado a revolucionar la forma de trabajar, en el diseño e implementación de sistemas de
comunicaciones.
Supongamos que se desea diseñar un enlace de comunicaciones de espectro
disperso, entonces deberíamos calcular mediante fórmulas el enlace para tener una primera
idea del comportamiento del sistema, sin embargo serán las pruebas de campo, las que nos
den certidumbre al evaluar un sistema. El simulador es en este sentido, una herramienta
más, para la evaluación de sistemas de comunicación. Existen simuladores que evalúan solo
un subsistema o bien evalúan un aspecto del sistema completo. Dependiendo de la
versatilidad del simulador es posible considerar una gran cantidad de posibilidades en el
diseño, de tal manera que se puedan descartar rápidamente posibilidades y optimizar los
tiempos y costos para un buen diseño.
Un aspecto fundamental en el cálculo del enlace y el diseño de sistemas de
comunicaciones es la Tasa de Bits Erróneos (BER). Si la tasa requerida es de 10-5
deberían, realizarse diez mil experimentos para observar un error en promedio, después
debe esperarse hasta encontrar por lo menos diez o más errores para garantizar el
significado estadístico de los resultados y poder aproximar la tasa de bits erróneos. La gran
ventaja de un simulador es el hecho de poder calcular miles de operaciones en pocos
minutos, además es posible presentar los resultados en forma gráfica, para una más fácil
interpretación de los mismos.
El software presentado es capaz de resolver un enlace de comunicaciones que
utilizando espectro disperso, es interferido por varios transmisores. El canal de
xii

comunicaciones es manipulado, de tal manera que es posible variar los modelos de
atenuación, e introducir ruido y desvanecimientos lentos. En el receptor se tratará, de
aproximar la tasa de bits erróneos, mediante un demodulador de bits de datos y otro de bits
de código.
Durante todo el proceso se muestran las gráficas de las señales y los datos utilizados
en cada etapa del sistema de comunicaciones. Finalmente se presentan las estadísticas de la
simulación.
En el capítulo I se presenta información general acerca de los sistemas de
comunicación de espectro disperso, las técnicas de acceso múltiple y fundamentos de
modulación.
En el capítulo II se presenta un análisis del canal móvil de radio, se presentan
modelos empíricos de propagación y el análisis de canales con dispersión Doppler así como
dispersión de retardo, finalmente se presenta un resumen de los tipos de desvanecimientos.
En el capítulo III se presenta una descripción del sistema para simulación del canal
de espectro disperso de secuencia directa. El estudio se realiza en tres bloques que son el
modulador, el canal y el demodulador.
En el capítulo IV se presentan los casos de estudio y los resultados generales de la
simulación para canales de desvanecimiento y Ruido Blanco Gaussiano Aditivo (RBGA)
en condiciones de Acceso Múltiple (MAI). En el capítulo V se presentan conclusiones y
trabajo futuro.
xiii

LISTA DE TABLAS 2.1 Valores típicos de dispersión de retardo 43
2.2 Resumen de los tipos de canales de desvanecimiento 63
3.1 Efectos del canal de comunicaciones 73
3.2 Valores de covarianza para las dos realizaciones de la figura 3.12 76
4.1 Datos de entrada al simulador para la aplicación 4.1 83
4.2 Resultado de la simulación para secuencias PN ajustadas 84
4.3 Resultado de la simulación para códigos Walsh 85
4.4 Resultados de la simulación S/N contra BER 87
4.5 Datos de entrada al simulador para la aplicación 4.3 89
xiv

LISTA DE FIGURAS
1.1 Esquema básico de un sistema de espectro disperso 3
1.2 Espectros. (a) Espectro de la señal en el canal. (b) Espectro de la señal demodulada 4
1.3 Transmisión por salto de frecuencia 6
1.4 Acceso múltiple 8
1.5 Técnicas de acceso. (a) Acceso múltiple por división de frecuencia.
(b) Acceso múltiple por división de tiempo. (c) Acceso múltiple por
división de código. 9
1.6 Ejemplo de generador de secuencias PN de 6 estados 16
1.7 Diagrama a bloques del sistema de comunicación sobre un canal con
Ruido Blanco Gaussiano Aditivo (RBGA) 17
1.8 Representación de sistemas de comunicación con formas de onda y vectorial 19
1.9 Extracción de los componentes vectoriales en si=(ss1,si2,...siN) de las formas
de onda si(t), por medio de la correlación de si(t) con ϕj(t), 0<t<T, j=1,2,...,N 21
1.10 Dos señales vectoriales en un espacio vectorial dos-dimensional 23
1.11 Cuatro señales en un espacio vectorial dos-dimensional 25
1.12 Dos pulsos sin traslape como un conjunto de funciones ON para síntesis de
señales de formas de onda 26
1.13 Formas de onda del transmisor para la señales vectoriales de la figura 1.10
sintetizadas con las formas de onda ON mostradas en la figura 1.11 27
1.14 Sistema de comunicación vectorial 28
1.15 Comunicación vectorial M-aria, N-dimensional 30
1.16 Receptor de correlación que garantiza la regla de decisión ML para
comunicación M-aria sobre canales de vector N-dimensionales en RBGA 33
1.17 MODEM de espectro disperso DSSS-BPSK. (a) Modulador. (b) Demodulador 34
2.1 El efecto del canal en la señal de entrada z(t) 39
2.2 El canal produce réplicas de la señal de entrada 40
2.3 La función de dispersión de retardo de un canal móvil típico 42
2.4 La dispersión de retardo puede ser calculada usando varios momentos de la
xv

función de dispersión de retardo 43
2.5 Distribución de retardos, aproximada por la función exponencial 44
2.6 Definición de ancho de banda de coherencia del canal en términos de la
función de transferencia en frecuencia. 2);( tfT d 48
2.7 El espectro de salida es una suma ponderada de los desplazamientos del
espectro de entrada 50
2.8 Relación del dispersor Doppler a la distribución de desplazamiento de
frecuencia v 51
2.9 Resumen de las características del canal de radio móvil 58
2.10 Desvanecimientos de término largo y término corto 60
3.1 Diagrama general del sistema de comunicación implementado 64
3.2 Diagrama a bloques del sistema 65
3.3 Pantalla principal del simulador 66
3.4 Esquema general del transmisor implementado 67
3.5 Pantalla del transmisor 68
3.6 Arreglo de registros utilizado para la generación de secuencias PN del simulador 69
3.7 La función de autocorrelación de la secuencia PN generada 69
3.8 Función de autocorrelación de las secuencias PN ajustadas 70
3.9 Códigos Walsh 71
3.10 Ortogonalidad de los códigos. a) Códigos Walsh, b) Secuencias PN ajustadas 72
3.11 Pantalla del canal de comunicaciones del simulador 73
3.12 Dos realizaciones de desvanecimiento 76
3.13 Función de covarianza para las dos realizaciones de la figura 3.12 76
3.14 Arquitectura del demodulador 77
3.15 Pantalla de estadísticas del simulador 79
4.1 Comparación de la ortogonalidad de los códigos Walsh y secuencias PN 82
4.2 Resultado de la simulación para secuencias PN ajustadas 84
4.3 Resultado de la simulación para códigos Walsh 85
4.4 Resultados de la simulación del canal RBGA en CDMA 88
4.5 Resultados de la simulación S/N contra BER, para un canal con RBGA y
desvanecimientos 90
xvi

CAPÍTULO I
COMUNICACIONES DE ESPECTRO
DISPERSO
1.1 Espectro Disperso (SS)
Las técnicas de espectro disperso han sido empleadas en comunicaciones militares y
sistemas de radar por cerca de 50 años. El propósito principal ha sido combatir los efectos
de la interferencia intencional (jamming) y realizar enlaces con señales inmersas en ruido
(“secretas”). Ambas cosas pueden realizarse, extendiendo el espectro de las señales
haciéndolas virtualmente indistinguibles del ruido de fondo.
La modulación de espectro disperso, es una técnica de comunicación inalámbrica que
usa un ancho de banda muchas veces más grande que el ancho de banda de la información.
Las aplicaciones asociadas a esta técnica pueden agruparse en varias categorías como sigue:
1. Alta tolerancia a la interferencia intencional (jamming) o no intencional, la cual es
suprimida en una cantidad proporcional al factor de ensanchamiento.
2. Estimación de la posición y velocidad, con exactitud incrementada
proporcionalmente al factor de ensanchamiento.
3. Baja detectabilidad de la señal transmitida para un receptor no destinado, la cual
decrece con el incremento del factor de ensanchamiento.
1

4. Comunicación en acceso múltiple para una gran cantidad de usuarios de un
espectro común, operando en la misma área, con el número de usuarios
simultáneamente conectados proporcional al factor de ensanchamiento.
El uso más importante de técnicas de espectro disperso en el mundo comercial esta en las
comunicaciones multiusuario. Expandiendo la señal de los múltiples usuarios con una
forma de onda única asignada para cada usuario que permite acceso simultaneo al canal
compartido de comunicaciones. Esta técnica es llamada Acceso Múltiple por División de
Código (CDMA). Esta tecnología digital de espectro disperso tiene una eficiencia superior
sobre el ancho de banda, y puede servir a mayor cantidad de usuarios (de acceso múltiple)
que otras tecnologías analógicas o digitales.
Las redes inalámbricas con espectro disperso mejoran la eficiencia por medio de la
incorporación de características únicas, las cuales han sido posibles gracias al
ensanchamiento del espectro de las señales. A continuación se listan estas
características:[2]
Una característica importante es el reuso universal de frecuencia (es el hecho de
que todos los usuarios en un área o nación utilizan un mismo espectro de
frecuencia). Además de que esto incrementa la eficiencia del uso del espectro,
elimina al mismo tiempo la necesidad de un plan de frecuencias.
Es muy importante llevar a cabo un rápido control de potencia, el cual asegura un
alto nivel de la calidad de transmisión mientras resuelve el problema “cerca-lejos”,
manteniendo una potencia de transmisión baja, para cada terminal.
Otra característica es la disminución del efecto provocado por desvanecimientos, a
través del uso del receptor rastrillo (Rake receiver), el cual combina en forma
constructiva las diferentes componentes multitrayecto de la señal. En vez de
permitir que las señales se combinen destructivamente como en una transmisión de
banda angosta.
2

El tercer beneficio lo ofrece el traspaso blando (soft handoff) con varias estaciones
base, lo cual ofrece un desempeño mejorado en los límites de la célula y previene
que se pierda la llamada.
1.1.1 Espectro Disperso de Secuencia Directa (DSSS)
Esta técnica utiliza un ancho de banda que permanece constante durante todo el tiempo. La
expansión de la información es realizada multiplicando cada bit de datos por una secuencia
que tiene una frecuencia mayor. Con esto se logra ensanchar el espectro de la señal en la
misma proporción que la frecuencia de la secuencia expansora sea mayor que la frecuencia
de los datos.
Figura 1.1 Esquema básico de un sistema de espectro disperso.
La figura 1.1 muestra el funcionamiento del sistema de espectro disperso de secuencia
directa. La secuencia de datos se multiplica por la secuencia de expansión que genera la
señal de espectro disperso. Es posible utilizar cualquiera de las técnicas de modulación
digital como por ejemplo BPSK (Binary Phase Shift Keying) o QPSK (Quaternary Phase
Shift Keying). La frecuencia de la secuencia de expansión, es en general más grande que la
de los datos, de tal manera que el espectro de esta señal está expandido. En el receptor debe
usarse el mismo código que se usó para expandir la señal, para volver a tener la señal de
banda base.
3

(a)
f
N
AW
AN
f B -B
(b)
Figura 1.2 Espectros. (a) Espectro de la señal en el canal. (b) Espectro de la señal
demodulada.
La figura 1.2 muestra los espectros de las señales que son generadas por el sistema de
comunicación de espectro disperso de la figura 1.1. En la figura 1.2 (a), se observa el
espectro de la señal que ha sido generada por el transmisor de espectro disperso, la cual ha
pasado por un canal con ruido hasta llegar al receptor. Se observa que el nivel del ruido está
por encima del nivel de potencia de la señal de datos. En la figura 1.2 (b), se observa como
la potencia de la señal de datos ha sido concentrada alrededor de frecuencia cero, esto
debido a la multiplicación que se realiza en el demodulador y a la etapa del integrador.
Como se observa en la figura 1.2 (b), con esto se logra una relación señal a ruido mayor que
la unidad.
1.1.2 Margen de Ruido.
La manera en la cual las señales de espectro disperso pueden ser procesadas para obtener
una ganancia en el rechazo a la interferencia puede mostrarse calculando el margen de
ruido, el cual se define como el exceso de interferencia tolerable sobre la potencia de la
señal deseada. [1]
4

Se definen los siguientes parámetros:
S = Potencia recibida de la señal deseada en Watts [W].
J = Potencia recibida de la señal no deseada en W. (otros usuarios en acceso múltiple,
interferencias o “Jamming”, Multitrayecto, etc.).
R = 1/Tb Tasa de transmisión de datos (ancho de banda de la señal de datos en Hz.).
W = Ancho de banda de la señal ensanchada en Hz.
Eb = Energía recibida por bit de la señal deseada en W-sec
N0 = Densidad espectral de potencia de ruido equivalente en W/Hz.
La relación de potencia de ruido J a S es:
00
0
//
/.
/.
NERW
NETW
TEWN
SJ
bb
b
bb
=== (1.1a)
Cuando Eb/N0 es el valor requerido para un desempeño aceptable del sistema de
comunicación, la relación J/S es el margen de ruido.
reqb NERW
SJ
)/(/
0
= (1.1b)
o en decibeles:
)()(0
dBNE
dBRW
SJ
req
b
−= (1.1c)
La cantidad W / R es llamada ganancia del proceso o factor de ensanchamiento. Note que
para sistemas sin ensanchar (R = W) el valor Eb/N0 es numéricamente igual a la relación
señal a ruido de potencias (SNR).
Suponiendo que la relación señal a ruido requerida es req
b
NE
0
= 5 dB.
5

Se obtiene: dBLogSJ 135)64(10 =−=
Es decir que el ruido o la señal interferente puede ser hasta 13 dB mayor que la
señal de espectro disperso. Si la señal no es de espectro disperso entonces la energía de la
señal de datos debe ser cuando menos 5 dB mayor que la señal del ruido.
Los valores para W/R varían de unos cientos a un millón típicamente (20dB a
60dB), mientras Eb/N0 puede variar entre (3dB a 9dB) [2].
1.1.3 Espectro Disperso por Salto de Frecuencia (FHSS)
En esta técnica de espectro disperso conocida como FHSS (Frequency Hopping Spread
Spectrum), la transmisión se realiza sobre diferentes portadoras a diferentes tiempos. La
portadora FHSS brinca entre sub-portadoras seleccionadas en forma pseudoaleatoria (Fig.
1.3). Estas sub-portadoras tienen un ancho de banda típico de 1 MHz.
La FCC (Comisión Federal de Comunicaciones) precisa que el ancho de banda
total sea dividido en al menos 75 sub-portadoras. Los datos se deben transmitir en una
cierta sub-portadora y después de un tiempo cambiar a otra sub-portadora. El tiempo limite
de permanencia en una sub-portadora que se recomienda es de 400 milisegundos.
El principio de funcionamiento es que cada usuario debe utilizar una frecuencia
distinta a la vez y después de 400 ms. debe brincar a otra frecuencia dando oportunidad a
que otro usuario utilice la frecuencia liberada.
Potencia
Frecuencia
Figura 1.3 Transmisión por salto de frecuencia
6

En este caso la secuencia pseudoaleatoria es utilizada para decidir, al patrón de
brincos y frecuencias que un determinado usuario debe seguir [6]. Si se presenta
interferencia, en una determinada frecuencia, ésta será minimizada por el tiempo tan
pequeño que el sistema permanece en ella.
1.1.4 Comparación de las Técnicas de Espectro Disperso
FHSS, no utiliza la ganancia de proceso ya que la señal en si no es ensanchada, por lo tanto
la potencia necesaria para una transmisión es mayor comparada con DSSS para una
relación señal a ruido dada. Se calcula que mientras los sistemas DSSS pueden alcanzar
hasta 40 Km. para una cierta potencia, los sistemas FHSS alcanzan solo 10 Km. [6].
En general la utilización de FHSS es más compleja ya que requiere de sincronía en
tiempo y frecuencia a cada salto, mientras que DSSS requiere solo sincronizar el tiempo de
bit (chip). Esto redunda en una menor latencia para la transmisión total de los datos.
7

1.2 Técnicas de Acceso Múltiple
Siempre que varios usuarios requieran utilizar del servicio de telefonía celular, será
necesario utilizar una de las técnicas de acceso múltiple, esto con el fin de acceder al
sistema sin interferir con otros usuarios. Los esquemas básicos resuelven el problema
dividiendo en tiempo o en frecuencias particulares para cada usuario.
ESTACIÓN
• • • • USUARIO USUARIO USUARIO
Figura 1.4 Acceso múltiple.
1.2.1 Comparación de las técnicas de acceso múltiple.
Existen tres formas básicas de acceso a sistemas en radiocomunicaciones:
FDMA (Frequency Division Multiple Access)
TDMA (Time Division Multiple Access )
CDMA (Code Division Multiple Access)
En la mayoría de la aplicaciones, estas tres técnicas pueden ser combinadas para formar
sistemas híbridos [5]. En México el sistema IS-95 utiliza FD/CDMA, mientras que el
sistema IS-54, utiliza FD/TDMA.
8

En FDMA (Fig. 1.5a), cada usuario utiliza, una porción del ancho de banda, para
acceder al sistema sin interferir con algún otro, en esta técnica todos los usuarios acceden al
mismo tiempo. La técnica FDMA se utilizó por muchos años en comunicaciones
analógicas.
En TDMA (Fig. 1.5b), cada usuario utiliza un tiempo distinto para transmitir en una
misma frecuencia. Esta técnica es utilizada en sistemas digitales, donde se tiene la ventaja
de utilizar codificadores de fuente y de canal, sobre los datos, además de incorporar
servicios de transmisión de datos y otros como identificador de llamadas. El costo que se
paga es la complejidad del sistema en técnicas y tecnologías, además de la necesidad de
una estricta sincronía de toda la red de usuarios.
En CDMA (Fig. 1.5c), cada usuario utiliza un código distinto y todos los usuarios
transmiten al mismo tiempo y en la misma frecuencia (ancho de banda). Tanto FHSS como
DSSS se utilizan actualmente en CDMA,1. Esta técnica se caracteriza por la utilización de
códigos para garantizar la no interferencia entre los usuarios. Al igual que TDMA tiene las
ventajas de los sistemas digitales.
(C) f
potencia
(A)
potencia
f1 f2 f3
f
(B)
potencia
t1 t2 t3 t
Figura 1.5 Técnicas de acceso. (a) Acceso múltiple por división de frecuencia. (b)
Acceso múltiple por división de tiempo. (c) Acceso múltiple por división de código.
9
1 En lo sucesivo nos referiremos a CDMA como a la técnica de acceso múltiple que utiliza espectro disperso de secuencia directa (DSSS).

CDMA tiene las siguientes ventajas cuando se usa en comunicaciones móviles:
Principalmente el sistema toma ventaja de la actividad por voz. Cuando dos
personas hablan, cada una lo hace menos de la mitad del tiempo, durante los periodos que
no habla el sistema se puede poner en “standby”, con el objeto de reducir la interferencia, lo
cual se traduce en más capacidad para el sistema.
El factor de reuso de frecuencia se reduce a uno, es decir que no se requiere de un
plan de frecuencias.
CDMA toma ventaja del multitrayecto utilizando los “rake receivers”, los cuales
demodulan y utilizan la energía de varias replicas [7].
1.2.2 Espectro Disperso y Acceso Múltiple [7]
Las propiedades que una secuencia de código debe tener para ser usado en acceso
múltiple son las siguientes:
Su correlación cruzada debe ser cero o muy pequeña.
Dos funciones de valor real x y y se dice que son ortogonales si su correlación
cruzada Rxy(0) sobre t es cero, es decir:
(1.2a) R ∫=T
xy dttytx0
)()()0(
En tiempo discreto las dos secuencias x y y son ortogonales si:
(1.2b) yR ∑=
==l
iii
Txy yxx
1)0(
Donde:
XT : Es la transpuesta de la matriz (secuencia)x.
l: Es el largo de la secuencias
10

Cada secuencia del conjunto tiene el mismo número de 1s que de –1s, o existe una
diferencia de uno cuando más. Esta propiedad da cierta aleatoriedad a los códigos.
La multiplicación del código por su transpuesta entre el orden del código debe ser
igual a uno.
(1.3)
= xxR ( ∑
=
=l
iii
Txx xx
1)0
1/)0( =NRxx Donde:
N: orden del código.
1.2.3 Acceso Múltiple por División de Código (CDMA)
CDMA es una técnica de acceso múltiple que utiliza modulación de espectro disperso. La
señal de información es modulada (multiplicada) por una señal de ancho de banda
extendido (código) que es única para cada usuario. Un receptor sincronizado utiliza el
mismo código para recuperar la información.
La capacidad de los sistemas CDMA es proporcional a la ganancia del proceso. A
continuación se analiza la capacidad del sistema [1].
En analogía con el análisis del margen de ruido (ecuación 1.1) tenemos:
La potencia de la portadora es:
(1.4) RET
SC ==≡ bb
bE
La potencia de interferencia en la estación base se define como:
0.NWI = ; (1.5)
Donde:
W es el ancho de banda de transmisión y N0 es la densidad espectral de potencia de
interferencia.
11

La relación portadora-interferencia de un solo móvil en la estación base es:
C (1.6) RWWI /
NENER bb /.. 0
0
==
Si M es el numero de usuarios móviles y se asume que existe perfecto control de potencia,
la potencia de interferencia total es:
)1.( −= MCI (1.7a)
ó
(1.7b) 1C
1−=
MI
de donde se obtiene:
(1.8) / )(1)1(
0NERWMM
b
=−≈
Por lo tanto la capacidad de un sistema CDMA depende de la ganancia del proceso. Esta
ganancia se basa en el hecho de que en el receptor los usuarios interferentes continúan
teniendo un ancho de banda W, mientras que la señal seleccionada es “compactada” al
quitar el código de expansión.
Estudios estadísticos han demostrado que durante una conversación telefónica, cada
usuario habla aproximadamente de un 35% del tiempo. Por lo tanto, es posible disminuir la
tasa de transmisión en sistemas digitales durante esas pausas en la conversación.
Ya que la transmisión no es totalmente eliminada sino que se disminuye la tasa de
transmisión para una duración del ciclo cercana al 40% o 50%, y si la duración del ciclo es
denotada por α la ecuación queda:
(1.9) 1WM ≈)/(. 0NER bα
12

Si la estación base emplea antenas direccionales, cada antena recibirá solo una
fracción de la interferencia dentro de la célula. En la práctica las antenas receptoras se
traslapan 15%. Si se consideran 3 sectores se obtiene un incremento de la capacidad de G=
3.(.85)= 2.55.
(1.10) M GNER
W
b
⋅⋅≈α1
)/(1
0
Simulaciones hechas por Qualcomm han demostrado que la interferencia causada
por células vecinas a la estación base es tan solo de 35% de la recibida en la estación base.
Basados en esta información la ecuación puede ser modificada para incluir el reuso de
frecuencia Fe.
(1.11) M e
b
FGNER
W⋅⋅⋅≈
α1
)/(1
0
Como ejemplo analizaremos la capacidad del sistema IS-95:
Ancho de banda =1.25 Mhz.
G = 2.55 ganancia de sectorización.
Fe = 0.65 factor de reuso de frecuencia.
α = 0.5 actividad por voz.
Eb/No = 7db = 5.
W = 1.25 Mhz.
R = 9.8 Kbps.
Usuarios por célula2
( )( ) ( )( ) 8565.55.25.11281
0
=
=
= FeG
NER
WMb α
13
2 El número de usuarios del sistema IS 95 está además limitado a los 64 códigos Walsh disponibles.

1.2.4 Generación de Códigos Walsh
En 1923 J.L. Walsh publicó un artículo titulado “Un conjunto cerrado de funciones
ortogonales normales”.Walsh demostró que las funciones eran ortogonales, normalizadas y
completas. Por ortogonales se entiende que al multiplicar cualquier par de funciones
distintas, e integrar sobre el intervalo, el resultado es cero. Por normal se entiende que si las
dos funciones son una y a la vez la misma, la integral de su producto es la unidad. La
palabra completo tiene un fundamento muy abstracto y no lo definiremos aquí.
En CDMA, todos los usuarios comparten la misma banda todo el tiempo. La forma
de evitar interferencia, es la utilización de códigos ortogonales.
Los códigos Walsh, se pueden generar a partir de la matriz de Hadamard de la
siguiente manera [7].
La matriz básica para la construcción de los códigos es la siguiente.
HN HN H2N= __ HN HN
0 0 H2 = 0 1
(1.12a)
Se repite el proceso iterativo hasta alcanzar la matriz de orden deseado, por ejemplo:
(1.12b) 1100=
0110
10100000
H2 H2 H4 = __ H2 H2
14

(1.12c) 11110000=
Cada renglón en la matriz es un código de Hadamar-Walsh. La longitud de los códigos
varía normalmente entre 100 y 1000.
100100110101
011011001010
0110110010100000
0110110010100000
H4 H4 H8 = __ H4 H4
1.2.5 Generación de Secuencias PN
Las secuencias PN pueden ser utilizadas para cambiar las secuencias de datos a otra
secuencia en forma aleatoria o bien como códigos de expansión. Similar al código Walsh,
la secuencia PN En el estándar IS-95 se utiliza una secuencia PN larga de 248 bits. realiza
la expansión o dispersión del espectro, sin embargo las secuencias PN tienen
características de autocorrelación que las hacen insustituibles [1].3
Estas características son:
Propiedad de balance. En un período completo de una secuencia PN, el número de
1s difiere del número de 0s por uno cuando más.
Propiedad de carrera. En cada secuencia hay 2n-1 cambios entre secuencias de 1s y 0s. Hay
la mitad se secuencias de largo 1.(un cuarto para 0s y un cuarto para 1s ). Hay un cuarto de
secuencias de largo 2 (ya sean dos ceros o dos unos). Un octavo de secuencias de largo 3,
etc.
15
3 En el estándar IS-95 se utiliza una secuencia PN larga de 248 bits.

Propiedad de correlación. Si una secuencia completa es comparada bit a bit con
cualquier secuencia obtenida de desplazar la primera, el número de coincidencias menos el
número de no coincidencias es siempre –1.
La generación de secuencias PN se lleva a cabo por registros de corrimiento
retroalimentados. Las secuencias generadas por n registros tienen una longitud de 2n-1
bits.La figura 1.6 muestra un ejemplo de generador de secuencias PN.
Sumador Modulo 2
R1 R2 R3 R4 R5 + R6
Figura 1.6 Ejemplo de generador de secuencias PN de 6 estados.
1.3 Modulación y Demodulación [1]
En un sistema de comunicación el canal se caracteriza como el medio que pert
transmitida. Cuando tenemos una descripción estadística precisa del proceso
canal de ruido, tal como el proceso Gaussiano, entonces somos capace
receptores óptimos que pueden ser implementados en el mundo real. Un
bloques de un sistema de comunicación es presentado en la figura 1.7, en l
denota un conjunto de M mensajes a ser transmitidos hacia el receptor por
conjunto de señales {si}.
Salida
urba la señal
aleatorio del
s de definir
diagrama a
a cual {m1}
medio de un
16

i=0,1…,M-1
Figura 1.7 Diagrama a bloques del sistema de
Ruido Blanco Gaussiano Aditivo (RBGA).
{ }im
Transmisor { })( ts i
La forma onda de onda recibida queda determinad
perturbada por en ruido n(t). Si el canal es RBGA ento
r(t) = si (t) + n(t)
El ruido n(t) es una variable aleatoria gaussiana con m
Pn ( )α =nσπ2
1 exp
−2
2
2 nσ
α
Si el mensaje transmitido por la señal si(t) es mi, se p
probabilidad (fdp) de la variable aleatoria r(t), dado qu
Pr ( )imα =nσπ2
1 exp
−−
2
2
2
)(
n
is
σ
α
La fdp condicional de la forma de onda recibida, da
llamada función de verosimilitud en vista del hecho d
es el valor si correspondiente al mensaje transmitido.
1.3.1 Representación Vectorial de las Formas de O
Una aproximación básica en el desarrollo del diseño d
idea de que las formas de onda pueden ser representad
Canal
comunicación sobre
n(t)
a por la señal transm
nces
edia cero y varianza σ
uede escribir la funci
e si(t) es transmitido.
do que el mensaje es
e que el modo (el valo
nda
e un receptor óptimo,
as por vectores N dim
Receptor r(t)
Mensa je
un canal con
itida la cual es
(1.13) 2= N0/2,
(1.14)
ón densidad de
(1.15)
transmitido es
r mas similar )
empieza con la
ensiónales.
17

La idea es remplazar un conjunto de M formas de ondas {si(t)}, por vectores N-
dimensionales si = (si1, si2,..., siN) utilizando formas de onda ortonormales (ON) { ϕj(t),
0≤t≤T }, j=1,2,...,N. Esto es
S i (t)=S i 1ϕ 1(t) + S i 2 ϕ 2 (t) +…+ S i Nϕ N(t) 0≤ t≤ T (1.16a)
Donde las funciones ON { })(tjϕ tienen la propiedad
∫∞
∞−ϕ j (t) ϕ k (t) dt = δ jk ∆
=
≠
kj
kj
,1
,0 (1.16b)
En donde hemos usado la delta de Kronecker δ jk.
Las formas de onda representadas en 1.16a son análogas a la siguiente representación
vectorial.
s i = s i (1.16c) 1 Ν
∧
Ν
∧∧
+++ ϕϕϕ ii ss L221 2
Donde es jϕ̂ es visto como el vector unitario en el j-ésimo eje de los N ejes mutuamente
perpendiculares ϕ1, ϕ2,...,ϕN. Así el conjunto de señales {si(t), i=0,1,...,M-1. puede ser
representado por M vectores {si}en un espacio vectorial de señales N-dimensional.
o
m s(t) r(t) decisión im∧
{ im }
Receptor
(a) Sist
Transmisor
{ })(tsi
ema de comunicación de c
Canal
{ }im
on formas de onda
Forma de onda recibida
n(t), función de ruid
18

n, vector de ruido
m s s m decisión i
∧
{ { }im }is
(b) Sistema de comunicación vectorial
Transmisor Canal Receptor { }im
Vector recibido
Figura 1.8 Representación de sistemas de comunicación con formas de onda y
vectorial.
En (1.16) los coeficientes {sij}, j=1,2,...,N de las funciones ON {ϕj(t)}, j=1,2,...,N son
extraídas de la siguiente operación
dtttss j
T
iij )()(0
ϕ∫∆ (1.16c)
Donde
dtttsdttts j
T T N
kkikji )()()()(
0 01
ϕϕϕ∫ ∫ ∑
=
=
= ijkj
N
Kik
T
jk
N
Kik ssdttts ==∑∫∑
==
δϕϕ1
01
)()(
Que es la operación de correlación por lo que los componentes vectoriales si1,si2,...,siN son
extraídos de N correlacionadores como se muestra en la figura 1.8.
Consideremos dos funciones del tiempo u(t) y ν(t) con transformadas de Fourier
U(f) y V(f), respectivamente, se asume que tenemos un conjunto de funciones ON {ϕj(t)},
0<t<T, j=1,2,...,N. Entonces
19

u(t)= 0)(1
tu j
N
jjϕ∑
=
Tt ≤≤ (1.17a)
y
∑=
=N
jjj tvtv
1)()( ϕ 0 Tt ≤≤ (1.17b)
Las representaciones vectoriales de u(t) y v(t) son
(1.17c) ( )Nuuuu ,,, 21 L=
(1.17d) ( Nvvvv ,,, 21 L= )
Entonces
dttvtudttvtuT N
kkk
N
jjj
T
∫ ∑∑∫
=
==0
110
)()()()( ϕϕ (1.17e)
∑=
=N
jjjvu
1
y
( ) ∑=
=
==⋅N
jjj
N
NT vu
v
vv
uuuuvvu1
2
1
21 ,...,M
(1.17f)
20

M
)(tsi
)(1 tϕ
⊗
⊗
⊗
iNS
( )dtT
∫0
( )dtT
∫0
)(2 tϕ
( )dtT
∫0
)(tNϕ
Si1
Si2
Figura 1.9 Extracción de los componentes vectoriales en si=(ss1,si2,...siN) de las forma
de onda si(t), por medio de la correlación de si(t) con ϕj(t), 0<t<T, j=1,2,...,N.
De (1.17e) se observa que el producto de las dos funciones del tiempo (señales ) es
igual al producto escalar de los dos vectores representando las funciones del tiempo.
Se define la siguiente notación:
∫ ∫∞
∞−=∆
Tdttvtudttvtutvtu
0)()()()()(),( (1.18a)
Tuvvuvu =⋅∆, (1.18b)
que representa el producto escalar (operación de correlación) en un espacio de funciones
mientras (1.18b) representa el producto escalar en un espacio vectorial.
21

Así que las relaciones (1.17e) y (1.17f) implican que
∫ ∑=
===T N
jjjvuvudttvtutvtu
01
,)()()(),( (1.19a)
El teorema de Parseval se define como:
dffVfUdttvtu )()()()( ∗∞
∞−
∞
∞−
∗ ∫∫ =
ó
∫ ∫∞
∞−
∞
∞−−= dffVfUdttvtu )()()()(
Para u(t)=ν(t), tenemos,
∫ ∫∞
∞−
∞
∞−Ε===
222 )()( udffUdttu (1.19b)
Donde E es la energía de la señal u(t). Para u(t)=s(t) se tiene:
Tsssssssu =⋅==Ε== ,22
(1.19c)
Esta es una expresión que se usa principalmente en el análisis de sistemas de comunicación
vectorial. Para el vector s, s2 es el cuadrado del largo del vector y de (1.19b) y (1.19c) se
obtiene que la energía de la señal es igual al cuadrado del largo del vector que representa la
forma de onda.
∫ ==ΕT
sdtts0
22 )( (1.19d)
Consideremos como ejemplo que los vectores de señal s0 y s1 mostrados en el espacio
vectorial de dos dimensiones en la figura 1.10 se desea analizar las formas de onda de esos
vectores escogiendo las funciones ON; ϕ1(t) y ϕ2(t) , 0<t<T.
22

Figura 1.10 Dos señales v
Consideremos las siguientes
tfT
t 01 2sin2)( πϕ =
tfT
t 02 2cos2)( πϕ =
Donde f0 = n/T, con n entero
),0()( ,02,010 Ε== sss
),0()( ,12,111 Ε−== sss
2
0s
1
ya que las formas de onda {
)()()( 2211 tststs iii ϕϕ +=
Tenemos que:
0
e
0
s
s
ctoriales en un espaci
formas de onda:
Tt ≤≤
Tt ≤≤0
. Asumiendo que s 20
1
i(t)}, i = 0,1 están dada
ϕ
ϕ
o vectorial dos-dimensional.
(1.20a)
(1.20b)
Es == 21 , las señales vectoriales son:
(1.20c)
s por:
(1.20d)
23

,2cos2)()(0)( 0210 tfTEttts πϕϕ =⋅Ε+⋅= (1.20e)
y
,2cos2)()(0)( 0211 tfTEttts πϕϕ −=⋅Ε−⋅= (1.20f)
Las señales s0 y s1 son de la forma:
)2cos(2)2cos(200 ii tf
TEitf
TEs θπππ −=−= , i=0,1 (1.20g)
Donde θ0=0 y θ1=π y así esas formas de onda son conocidas como Binary Phase Shift
Keying (BPSK).
Considerando las siguientes 4 señales vectoriales:
),0(0 Es = (1.21a)
),0(2 Es −=
Ya que las formas de onda
)()(0)( 210 tEtts ϕϕ =⋅+⋅=
)(0)()( 211 ttEts ϕϕ ⋅+⋅−=
tEtts ⋅−⋅= ()(0)( 212 ϕϕ
ttEts ⋅+⋅= (0)()( 213 ϕϕ
( Es =
)0,(
)0,
3
1
Es =
−
{si(t)}, i=0,1,2,3,4 están dadas por 1.20d tenemos:
,2cos20tf
TE π Tt ≤≤0 (1.21b)
,2sin20tf
TE π−= Tt ≤≤0 (1.21c)
Tt ≤≤0t,fTE
−= 2cos2) 0π (1.21d)
TttfTE
≤≤= 0,2sin2) 0π (1.21e)
24

1s
2s
3s
0s
2ϕ
1ϕ0
Figura 1.11 Cuatro señales en un espacio vectorial dos-dimensional.
Las formas de onda {si(t)} pueden ser expresadas como
TtiitfTEts ≤≤=+= 0;3,2,1,0),
22cos(2)( 01
ππ (1.21f)
Las formas de onda han sido representadas por cuatro vectores, como un conjunto de dos
señales BPSK conocidas como Quadrature Phase-Shift Keying (QPSK).
Los dos ejemplos mostrados pertenecen al caso en el que las señales vectoriales
dadas son transformadas en formas de onda basadas en funciones ON senoidales. Ahora
escogemos funciones ON diferentes y se muestra que las formas de onda transmitidas son
totalmente diferentes.
25

Consideremos las siguientes pulsos unitarios como formas de onda ON.
322 t
−=
212Re2)(1 T
tctT
tϕ
/2 T/2
t
2T
T
T
Figura 1.12 Dos pulsos sin traslape como un conjuntode señales de formas de onda.
Las correspondientes formas de onda son
0,
,0
0,
,0
3
2
1
0
E
E
E
−
−
2
2
2
→
→
E
E
E
T( )Es =2)(0 =→ rectEts
( )s = )(1 −= rectT
ts
( )s = )(2 −= rectT
ts
( )s = )(3 =→ rectT
ts
−=2
Re)(2 Tct
Ttϕ
t
2T T
de funciones ON para síntesis
12
32
212
,232
−
t
t
t
Tt (1.22a)
, −T
(1.22b)
,2
−T (1.22c)
,2
−T (1.22d)
26
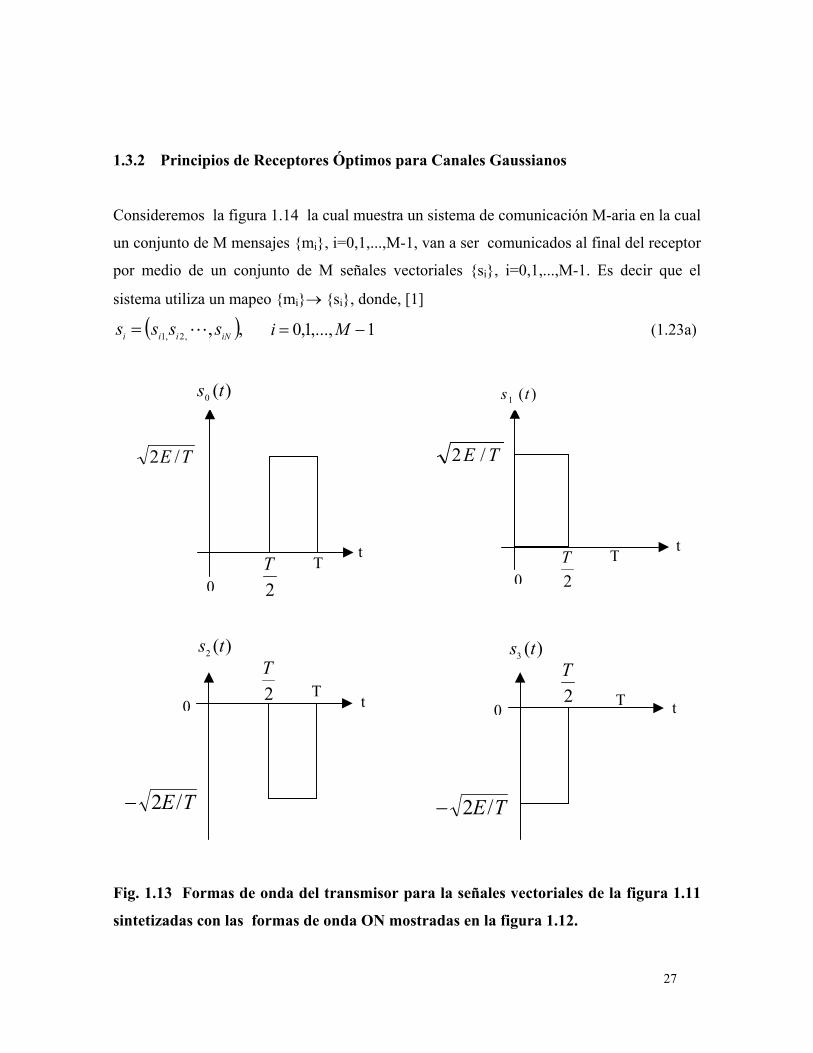
1.3.2 Principios de Receptores Óptimos para Canales Gaussianos
Consideremos la figura 1.14 la cual muestra un sistema de comunicación M-aria en la cual
un conjunto de M mensajes {mi}, i=0,1,...,M-1, van a ser comunicados al final del receptor
por medio de un conjunto de M señales vectoriales {si}, i=0,1,...,M-1. Es decir que el
sistema utiliza un mapeo {mi}→ {si}, donde, [1]
( ),,,2,1 iNiii ssss L= 1,...,1,0 −= Mi (1.23a)
TE/2−
2T
)(2 ts
TE /2
2T
TE /2
)(0 ts
2T
)(1 ts
TE/2−
2T
)(3 ts
0 T t 0T
t
0T t
0T
t
Fig. 1.13 Formas de onda del transmisor para la señales vectoriales de la figura 1.11
sintetizadas con las formas de onda ON mostradas en la figura 1.12.
27

msm
{ }m
∧
{ }im
{ (mP
Datos
Decisión Perturbación
r
n
Receptor
Figura
El cana
por:
n=(n1, n
y produ
,( 1rr =
Los me
i=0,1,…
llevarse
distribu
Ahora
r γ ==
Para el
Aunque
densida
T ransmisor
{ }is
} 1,...,1,0,) −= Mii
1.14 Sistema de comunic
l corrompe los componente
2, ..., nN)
ce el vector r en el receptor
),...,2 Nrr
nsajes {mi} son eventos a
,M-1 tal que
a cabo asumiendo que l
ción conocida.
∑ −
=
1
0)(M
i imP
suponemos que el vector r
),...,,( 21 Nγγγ
mensaje transmitido m del
no sabemos cual es el
d de probabilidad )del vect
Canal
i
ación vectorial.
s vectoriales transmitidos con el vector de ruido n, dado
(1.23b)
(1.23c)
leatorios con probabilidades a priori conocidas {P(mi)},
. El desarrollo del diseño de receptores óptimos puede
a perturbación es un proceso aleatorio de ruido con
= 1
ecibido es
(1.24a)
vector de señal s.
mensaje enviado, el conocimiento de la pdf (función
or de ruido n=(n1,n2,…,nn) dará la forma de la función de
28

verosimilitud, la cual es la pdf condicional de unión del vector recibido r, teniendo la
forma,
),...,,()( 21 mPsP Nrr γγγγ = (1.24b)
En el receptor óptimo, uno tiene que calcular todas las probabilidades a posteriori
{ )( γ=rmP i }, i=0,1,...,M-1. Donde iff significa si y solamente si. Se propone el criterio
de decisión MAP (máxima probabilidad a posteriori) como
kmm =ˆ iff { })(max)( γγ === rmPrmP iik (1.24c)
pero
)( γ=rmP i =)(
)()()(
),(γγ
γγ
r
iri
r
ir
PmmPmP
PmP =
= (1.24d)
Donde
),...,()( 21,...,2,1 NrNrrr PP γγγγ =
Asumiendo que los M posibles mensajes son equiprobables, se puede simplificar (1.24c)
como se muestra a continuación.
kmm =ˆ iff ),...,,()( 21,...,2,1 kNrNrrr ssPP == γγγγ
=m x { } (1.24e) ),...,,( 21,...,2,1 iNrNrr ssP =γγγ
Donde el lado de
el criterio de dec
(ML), cuando la p
ai
recho de (1.24e) es un conjunto de M funciones de verosimilitud, así que
isión MAP es reducido al criterio de decisión de máxima verosimilitud
robabilidad de los mensajes se asume igual.
29

1.3.3 El Receptor de Correlación
Consideremos la figura 1.15 donde se describe la comunicación vectorial M-aria, N-
dimensional sobre un canal con ruido blanco Gaussiano aditivo, se especifican los vectores
de señal, de ruido y recibido como sigue:
),...,,( 21 Nssssm =↔
),...,,( 21 Nnnnn = (1.25a)
r=s+n=(s1+n1,s2+n2,…,sN+nN)
Asumiendo que s y n son estadísticamente independientes4 y que los N componentes de n
son estadísticamente independientes, variables aleatorias Gaussianas con media cero y
todas con varianza σ2, tenemos la regla ML,
kmm =ˆ iff { })(max)( irkr ssPssP === γγ
i (1.25b)
i = max { })( in sP −γ
{ }imm∧
1,...,1,0 −= Mi
),...,,( 21 Nnnnn =
nsr+{ }is
s{ }im
mTransmisor Receptor
Figura 1.15 Comunicación vectorial M-aria, N-dimensional.
Donde
30
4Esa condición significa que )()()( sPssPsP nnr −=−= γγγ ó .| nsn PP =

),...,,()( 2211,...,2,1 iNNiinnnin sssPsPN
−−−=− γγγγ (1.25c)
Utilizando los N independientes y e idénticamente distribuidos vectores Gaussianos de
ruido:
−== ∑
=
N
jjNNnnnn N
PP1
222/221,...,2,1 2
1exp)2(
1),...,,()( βσπσ
ββββ (1.25d)
El criterio de decisión ML queda como:
kmm =ˆ iff { })(m x)( inkr ssPssP === γγ
−−= ∑
=
N
jijjN s
1
222/2 )(
21exp
)2(1max γ
σπσ
(1.25e) { }2
1
2 in)(in i
N
jijj ss −=
−= ∑=
γγ
En la cual el producto punto de un vector con él mism
largo. En la ecuación (1.25e) está implícito que e
recepción óptima) es la regla de decisión de la distanc
La regla de decisión ML puede ser descrita también co
kmm =ˆ iff { })(m x)( inkr ssPssP === γγ
{ }2minis
i−⇒ γ
im
ia
i
im
o, se reconoce como el cuadrado del
l criterio de decisión ML (regla de
ia mínima.
mo sigue:
ia
31

{ }22 ,2min
ii ssi
+−= γγ
{ }isi
,min
γ⇒ (1.25f)
Donde se asume que cada señal tiene la misma energía.
∫ ==T
ii Edttss0
22 ,)( 1,...,1,0 −= Mi (1.25g)
notamos que el término γ2 es independiente del índice de decisión “i”. Debemos
observar que la regla de decisión de máxima verosimilitud es la regla de decisión de
máxima correlación así como también una regla de decisión de distancia mínima. La
operación de correlación ese define tanto en el espacio vectorial como en el espacio de
funciones (formas de onda):
∫∆T
ii dttstrtstr0
)()()(),( (1.25h)
∑=
=N
jijj srsr
1, (1.25i)
Es importante notar que el sistema de comunicación vectorial implementa un receptor de
correlación como se muestra en la figura 1.16 basado en la expresión (1.25i), la cual es una
condición suficiente para la regla de decisión ML.
32

Cómputo
)(tr
1, −Msr
1,sr
0,sr
110 −MsssL
rN
r2
r1 ( )∫T
dt0
( )∫T
dt0
( )∫T
dt0 ∑
=
N
jiji sr
1
1,...,1,0 −= M
1
)(2 t
)(tN
Disponibles en el receptor
∧
Figura 1.16 Receptor de correlación que garantiza la regla de de
comunicación M-aria sobre canales de vector N-dimensionales en RBG
1.3.4 El Sistema DS-BPSK [17]
La expresión para la BPSK (Binary Phase Shift Keying) es :
tCostApt cω).()( =Φ
Donde:
p(t): es una función de conmutación binaria con estados posibles ±1 y
señal modulante (entrada).
A: es la amplitud de la señal
ωc: es la frecuencia de la señal portadora
m
i
)(tϕ
ϕ
ϕ
M
M
Mcisión ML para
A.
(1.26)
gobernada por la
33

La señal de espectro expandido DSSS resultante es:
tCostptAct cωχ ).()()( = (1.27)
Donde:
c(t) es la señal de modulación expansora.
Una elección común para c(t) es la de la secuencia binaria de ruido pseudoaletorio
(PN) o un código Walsh con valores ±1. A continuación se muestra el sistema BPSK para
espectro expandido.
Figura 1.17 MODEM de espectro disperso DSSS-BPSK. (a) Modulador. (b)
Demodulador.
La demodulación de esta señal de espectro expandido DS requiere la multiplicación por c(t)
y por cos(ωct), un filtro de integración y descarga, y un umbral de decisión binario. Se
supone que existe sincronización de la fase entre el transmisor y el receptor, no solo para la
señal BPSK sino también para la señal expansora. La sincronización y la multiplicación
apropiadas de la señal expansora así como el conocimiento de esta señal en el receptor, se
llama contracción y es una función crítica de los sistemas de espectro expandido.[8]
34

La densidad espectral de potencia de la señal expansora c(t) es:
( ) ( )2/2chchch TSaTS ωω = (1.28)
donde Tch es la duración de los pulsos del código5.
La densidad espectral de potencia de la señal SS-BPSK modulada es:
( ) { }]2/)[(]2/)[(21 222
chcchcch TSaTSaTAS ωωωωωφ −++= (1.29)
En la figura 1.16 (b) el receptor en el sistema de espectro expandido DS multiplica la señal
de entrada con la señal expansora c(t) con la portadora cosωct. No sólo es necesario
sincronizar el oscilador de la frecuencia portadora en el receptor con el del transmisor, sino
también sincronizar el generador de la señal en el receptor con el del transmisor.
El procedimiento de sincronización en el receptor, requiere que el receptor tenga (o
pueda generar) una réplica de la secuencia PN correcta. Un método comúnmente usado
para la adquisición es el de búsqueda escalonada en serie. En este método, la salida de un
generador PN en el receptor se multiplica con la corriente de bits de entrada. La señal
resultante se aplica a un filtro pasa-banda (centrado en ωc), luego a un detector de
envolvente y a un detector de umbral que se fija para que se dispare si se presenta un
“buen” emparejamiento. En ausencia de dicho emparejamiento, la sincronía de la
secuencia PN en el receptor prosigue y se repite el proceso. Una vez completada la
adquisición, el receptor debe ser capaz de mantener el alineamiento de tiempo correcto de
la secuencia PN recibida y la réplica generada dentro de una fracción del intervalo de chip.
Un circuito usado a menudo con este propósito es el lazo de amarre de retardo (DLL). El
empleo de este circuito supone una sincronización inicial en un medio del intervalo de chip
[8].
5 El subíndice ch se utiliza por chip (bits de código) y b para bits (bits de datos).
35

CAPÍTULO II
EL CANAL MÓVIL
Entre la antena del transmisor y la antena del receptor, la señal transmitida sufre varios
efectos. El término “canal” se refiere a esos efectos en la señal. Incluidos en el canal están
la atenuación o pérdidas de trayecto, ruido y varios fenómenos de desvanecimientos
(fading).
En la mayoría de los casos, el ambiente radio-móvil no será tan bueno como un
canal con ruido (RBGA) solamente. La detallada caracterización de la propagación resulta
en desvanecimientos, el cual es en sí un proceso multiplicativo, variante en el tiempo,
aplicado al canal [3].
2.1 Modelos de Propagación [7]
Las pérdidas de trayecto se refieren a la atenuación que la señal sufre en todo el trayecto,
desde el transmisor hasta el receptor. En este apartado se describen el modelo para el
espacio libre y la fórmula empírica de Hata. Se ha elegido la fórmula de Hata por que es
un modelo ampliamente usado para el diseño de sistemas celulares.
2.1.1 Pérdidas en el Espacio Libre
Este modelo, nos representa solo las perdidas caudas por la propagación de una onda
esférica, que se radia a partir de un punto en el espacio.
36

( ) ( )dfLp log20log204.32 −−−= (2.1)
Donde:
Lp: pérdidas de trayecto en decibeles
f: frecuencia (en MHz)
d: distancia (en Km)
2.1.2 Modelo de Hata
El modelo de Hata está basado en mediciones empíricas tomadas en ambientes urbanos.
Este modelo además de la distancia y la frecuencia, considera la altura de las antenas de la
estación base y el móvil así como la densidad de los edificios. Su definición en decibeles
es la siguiente:1
( ) ( ) ( ) ( )[ ] ( ) 021 loglog55.69.44log82.13log KdhhahfKKLp bmb −−−++−−= (2.2)
Donde:
Lp; son las pérdidas de trayecto en decibeles
f; es la frecuencia (en MHz)
hb; es la altura de antena de la estación base (en metros), y es válido de 30 m a 200 m
hm; es la altura de antena de la estación móvil (en metros), es válido de 1m a 10 m
d; es la distancia entre la estación base y el móvil (en Km), es válido de 1km a 20 Km
a(hm) y K0; son calculados a partir del tipo de ambiente, ya sea en ambiente urbano o
denso urbano
K1 y K2; son calculados a partir de los rangos de frecuencias
a(hm)=[1.1log(f)-0.7]hm – [1.56log(f)-0.8] para ambiente urbano
a(hm)=3.2[log(11.75hm)]2 – 4.97, para ambiente urbano denso
K1=69.55 para un rango de frecuencias de 150 MHz < f < 1000 MHz
K1=46.3 para un rango de frecuencias de 1500 MHz < f < 2000 MHz 1 Información detallada del modelo en [6].
37

K2= 26.16 para un rango de frecuencias de 150 MHz < f < 1000 MHz
K2=33.9 para un rango de frecuencias de 1500 MHz < f < 2000 MHz
2.2 Modelos de Canales [1]
Algunos modelos matemáticos describen los efectos del canal sobre la señal variando en el
tiempo. Esos modelos están dados matemáticamente como una función del tiempo, la cual
puede además ser descrita en el dominio de la frecuencia. Un componente importante del
canal es el arribo de múltiples réplicas de la señal interfiriendo con la señal deseada. Otro
efecto importante es el desplazamiento en frecuencia en la señal debido al movimiento
relativo entre transmisor y receptor.
2.2.1 Función Dispersión de Retardo
Un efecto del canal es el de crear múltiples réplicas de la señal que llega con varias
amplitudes y fases. Este efecto puede ser medido y expresado matemáticamente.
Consideremos un canal que es presentado con una envolvente compleja de la señal de
entrada z(t), donde
)()()( tjQtItz zz += (2.3a)
el canal afectará a la señal de entrada de tal manera que producirá la señal envolvente
compleja ω(t) a la salida, donde
)()()( tjQtIt ww +=ω (2.3b)
La entrada y salida pueden ser expresadas en función de la frecuencia tomando la
transformada de Fourier,
38

∫∞
∞−
−== dtetztzFfZ ftj π2)()}({)( (2.3c)
y
∫∞
∞−
−== dtettFfW ftj πωω 2)()}({)( (2,3d)
en el dominio del tiempo, la envolvente compleja de la salida del canal puede ser expresada
como la convolución de la envolvente compleja de la entrada z(t) con la función del canal
);;( tg τ
∫∞
∞−
−= dttgtzt );()()( ττω (2.4)
donde la función del canal );( tg τ es la función de dispersión de retardo del canal y
generalmente es una variable compleja.
ω(t)Canal (t) z(t)
Figura 2.1 El efecto del canal en la señal de entrada z(t).
Si la entrada al canal fuera un impulso a un tiempo 0τ=t , entonces usando
)()( 0τδ −= ttz en (2.4) tenemos
∫∞
∞−
−=−−= );();()()( 00 ttgdttgtt ττττδω (2.5)
El ejemplo muestra que la función de dispersión de retardo );( tg τ es la respuesta del canal
al tiempo t a un impulso en el tiempo t-τ . Así, este impulso fue transmitido τ segundos
antes que la respuesta al tiempo t. El ejemplo de hecho muestra que la función de
dispersión de retardo de un canal puede ser encontrada enviando un impulso y midiendo los
39

impulsos recibidos. El canal también puede ser caracterizado en términos de intervalos
discretos ).( τ∆i
− itz(
0
del tiempo de retardo como la suma:
)(τg
∑ ∆∆∆≈i
tigt τττω );())( (2.6)
Así que el canal puede ser visto como una línea de retardo con cada etapa afectada por un
coeficiente de amplitud. La salida es una suma de las versiones retardadas de la señal de
entrada, cada una pesada por un coeficiente de amplitud. Un diagrama de esta
representación esta dado en al figura 2.2.
Para un sistema causal, tal como un canal de propagación:
0);( <= ττ paratg (2.7)
Además si el sistema es invariante en el tiempo entonces la dependencia puede
establecerse como:
);(τ tg ≡ (2.8a)
Entradaz(t)
Sumatoria
Línea de retardo
g(1;t) g(2;t) g(3;t) … g(N;t)
Salidaω(t)
Figura 2.2 El canal produce réplicas de la señal de entrada.
por lo tanto, el canal actúa como un filtro ordinario en el cual la salida es la convolución de
la entrada y la respuesta al impulso.
40

τττω dgtztgtzt ∫∞
∞−
−== )()()(*)()( (2.8b)
Un canal típico de multitrayecto es usado para demostrar la función de dispersión de
retardo: supóngase que la entrada al sistema esta dada por z(t)=s(t) (valor real) y la salida
del canal esta dada por
)(........)()()( 2211 NN tststst ταταταω −++−+−= (2.9a)
∑=
−=N
kkk ts
1)( τα (2.9b)
∑∫=
∞
∞−
−−=N
kkk dts
1)().( τττδατ (2.9c)
una comparación de (2.9c) con (2.4) conduce a una función de dispersión de retardo que es
la superposición de los impulsos retardados:
∑=
−=N
kkk ttg
1)();( τδατ (2.10)
esta forma de la función de dispersión de retardo puede ser vista gráficamente en la figura
2.3.
41

1τ 2τ 3τ 4τ Nτ
);( tg τ
)(1 tα
)(2 tα
)(3 tα)(4 tα
)(tNα
τ
Figura 2.3 La función de dispersión de retardo de un canal móvil típico.
La dispersión de retardo, denotada como τ∆ indica el grado de la dispersión en tiempo en
el canal. La dispersión de retardo del canal puede ser encontrada de varios momentos de la
función de dispersión de retardo, );( tg τ . La dispersión de retardo es la raíz cuadrada de la
diferencia entre la media del retardo al cuadrado y el cuadrado del retardo medio, que es
expresado como
21
2
2
22
);(
);(
);(
);()()()(
−
=−=∆
∫
∫
∫
∫∞
∞−
∞
∞−∞
∞−
∞
∞−
ττ
τττ
ττ
ττττττ
dtg
dtg
dtg
dtgt (2.11)
la relación entre algunos de los parámetros de (2.11) y la función de dispersión de retardo
de un canal multitrayecto es mostrado en la figura 2.4.
La dispersión de retardo del canal depende en parte de la proximidad de objetos
dispersores al transmisor y al receptor. Otro factor es la cantidad de agentes dispersores en
el ambiente. La tabla 2.1 muestra ejemplos típicos de dispersión de retardo en diferentes
ambientes [9]. El retardo mínimo 0τ es el tiempo requerido por la señal para propagarse
directamente del transmisor al receptor.
42

Tipo de ambientes Dispersión de
retardo
Dentro de edificios <0.1 µ s
Áreas abiertas <0.2 µ s
Áreas suburbanas 0.5 µ s
Áreas urbanas 3 µ s
Tabla 2.1 Valores típicos de dispersión de retardo.
__τ
1τ 2τ 3τ 4τ Nτ
);( tg τ
)(1 tα
)(2 tα
)(3 tα)(4 tα
)(tNα
τ∆
τ
Figura 2.4 La dispersión de retardo puede ser calculada usando varios momentos de la función de dispersión de retardo.
La mayoría de las señales multitrayecto se agrupan justo después que se ha recibido la
primera señal. Los retardos largos con respecto a τ0 son recibidos raramente. Así es común
modelar esta distribución de la dispersión de retardo como una distribución exponencial
desplazada por τ0. Si esta distribución es normalizada por su dispersión de retardo se tiene:
0/)( ,.1
);(
);(0 ττ
ττ
ττττ
τ
≥∆
= ∆−−∞
∞−∫e
dtg
tg (2.12)
43

La media de la distribución exponencial normalizada es:
0/)( 0
0
1 ττττ τττ
ττ
τ +∆=∆
= ∆−−∞
∫ de (2.13a)
La media cuadrática de la distribución esta dada por
20
2/)(22 )(10
0
ττττ ττττ
ττ
τ +∆+∆=∆
= ∆−−∞
∫ de (2.13b)
Así, la desviación estándar para un retardo con distribución exponencial es:
ττ ττσ ∆=−∆ 22 )( (2.13c)
τ τ0
τ∆)(τf
Figura 2.5 Distribución de retardos, aproximada por la función exponencial.
2.2.2 Función de Transferencia en el Dominio de la Frecuencia
La función dispersión de retardo y su parámetro asociado τ∆ han sido descritos en el
dominio del tiempo. Los efectos de la dispersión de retardo pueden ser descritos en el
dominio de la frecuencia, en base a la función de transferencia del canal.
44

La función de transferencia de un sistema se define como la salida dividida entre la entrada.
Esto es:
)()();(
fZfWtfT = (2.14a)
y
{ });();();( 2 tgdetgtfT fj τττ τπ ℑ== ∫∞
∞−
− (2.14b)
En general T(f;t) es una función compleja variante en el tiempo.
Si la estrada de un sistema lineal invariante en tiempo es , del cual su transformada
de Fourier es δ(f-fd), entonces la salida está dada por:
tfj de π2
∫∞
∞−
− =−=−ℑ tfjd
ftjdd
defHdfefffHfffH ππδδ 221 )()()()}()({ (2.15)
Donde H(fd) por definición describe la ganancia del sistema a la entrada ej2πfdt.
Se asume que la señal de valor real de pasa banda es
)](2cos[)()22cos(])(2cos[)(
ttftRtftftfftx
o
dodo
φππππ
+=+=+=
(2.16)
El valor de la envolvente R(t) es 1 y la función de fase φ(t)=2πfdt. La envolvente compleja
esta dada por:
)2()2cos(1)()( 2)( tfjsentfeetRtx ddtfjtj d πππφ +=⋅== (2.17)
45

Cuando la envolvente compleja de la entrada del canal variante en el tiempo es la
exponencial compleja: , la envolvente compleja de la salida del canal está dada
por:
tfj dez π2=
∫∫∞
∞−
−∞
∞−
− = ττττ τππτπ detgedetg ddd fjtfjtfj 22)(2 );();( (2.18)
La integral del lado derecho es la transformada de Fourier de la función de dispersión de
retardo con respecto a la variable de retardo τ, entonces la envolvente a la salida es
);();( 222 tfTedetge dtfjfjtfj ddd ⋅=∫
∞
∞−
− πτππ ττ (2.19)
A partir de la función de transferencia puede ser explicado el concepto de ancho de banda
de coherencia para el canal alrededor de la frecuencia f0 y el tiempo t.
Supongamos que dos componentes de señal, z1 y z2, tienen frecuencias (f0+fd) y (f0-fd),
esto es que la señal contiene las senoides:
}Re{])(2cos[)( 2211011
1 tfjjtfjd
od eeAtffAtz πφπφπ ⋅=++= + (2.20a)
}Re{])(2cos[)( 2222022
2 tfjjtfjd
od eeAtffAtz πφπφπ ⋅=++= + (2.20b)
Con la respectiva envolvente compleja
21 2
222
11 )()( φπφπ jtfjjtfj dd eAtzyeAtz +−+ == (2.21)
Las envolventes complejas para esas frecuencias a la salida del canal son
).;();()( 12111 tfTeAtfTzt d
jtfjd
d ⋅=⋅= + φπω (2.22a)
y
);();()( 22222 tfTeAtfTzt d
jtfjd
d −⋅=−⋅= +− φπω (2.22b)
46

En donde la frecuencia central f0 está implícita en la definición de T(f ; t), ya que la
operación del canal en la envolvente compleja de la señal esta bajo consideración. Una
medida de coherencia o acuerdo entre los componentes de la señal en el dominio de la
frecuencia, después de ser afectadas por el canal es la función de correlación o función de
coherencia:
);(}),({}.{
)};();({}.{},{2
21
2121
tfCtfTEzzE
tfTtfTEzzEE
dd
dd
∆=
−⋅=ωω (2.23)
Donde E{.} denota la esperanza (promedio estadístico).
El ancho de banda de coherencia del proceso recibido se define como la separación de la
frecuencia mas allá de la cual las componentes de la envolvente compleja recibida son
estadísticamente independientes, bajo la consideración que los efectos aleatorios del canal
son modelados por una adecuada función de dispersión de retardo g(τ;t), es decir una VA
Gaussiana, para la cual la independencia estadística es igual a una correlación de cero entre
sus componentes. Como una medida práctica en lugar de una correlación de cero, podemos
definir el ancho de banda de coherencia Bc como la separación de frecuencia fd =Bc tal
que,
C(Bc;t)=0.5 (2.24)
La separación de frecuencia a la cual la coherencia entre componentes de la señal cae a la
mitad es dos veces el ancho de banda de coherencia o 2Bc. Asumiendo que la correlación
entre los componentes de la señal original E{z1 . z2}es relativamente indepeniente de la
frecuencia, la coherencia es proporcional al valor promedio de |T(fd;t)|2 , la magnitud al
cuadrado de la función de transferencia del canal.
47

El ancho de banda de coherencia del canal puede ser definida como el valor de fd=Bc, que
causa que el valor de |T(fd;t)|2 caiga a un medio de su valor para fd=0. Es decir que Bc
puede ser visto como el ancho de banda de 3 dB del canal , alrededor de la frecuencia f0,
como se observa en la figura 2.6.
Figura 2.6 Definición de ancho de banda de coherencia del canal en términos de la función de transferencia en frecuencia. 2);( tfT d .
2);( tfT
f
3 dB
Bc
Por ejemplo, supóngase que la función dispersión de retardo es no variante en tiempo y esta
dada por: τττττ ∆−−== /)( 0)();( kegtg e (2.25)
Donde τ≥τ0 y k es una constante. La función de transferencia quedaría expresada como:
∫∞
−∆−−===0
0 2/)( .)}({)();(τ
τπττ ττ τ dekegFfTtfT fjee
(2.26a)
(2.26b) ∫∞
∆−+∆−−=0
00 /))(12(2
τ
ττπτπ τττ dkee fjfj
00
2
0
/2
2121τπ
τ
τ
τ
τπ
ππτ fjx
fj
efj
kdxefj
ke −∞
∆−−
∆+∆
=∆+
= ∫ (2.26c)
48

La medida de coherencia para este ejemplo es:
222
2
)2(11
|21|1
|)0(||)(|
ττ ππ ∆+=
∆+=
dde
de
ffjTfT (2.27)
y el ancho de banda de coherencia es:
ττ ππ ∆=⇒=
∆+ = 21
21
)2(11
2 cBfd
Bfj
cd
(2.28)
2.2.3 Función de Dispersión Doppler
En el dominio de la frecuencia la transformada de Fourier de la envolvente de salida
compleja W(f) respecto al parámetro de retardo τ, puede ser modelada como el producto
de la función de transferencia de frecuencia del canal T(f;t) por la transformada de la
envolvente compleja de entrada Z(f); esto es W(f)=Z(f)·T(f;t). La transformada de la
envolvente compleja de salida puede además ser modelada como la convolución de la
envolvente compleja de entrada y una función llamada función de dispersión Doppler
H(v;f):
∫∞
∞−=∗=−= ffHZdvfvHvfZfW ααα )];()([);()()( (2.29)
Suponiendo que la función de dispersión Doppler es un impulso H(v,f)=Kδ(v-fd), entonces
la salida del canal en el dominio de la frecuencia es:
∫∞
∞−
−=−−= )()()()( dd ffKZdvfvKvfZfW δ (2.30)
El valor de H(v;f) en v es la porción del espectro de salida a la frecuencia f que se debe al
desplazamiento del espectro de entrada hasta por v Hz.
49

Las reflexiones de objetos en movimiento pueden causar un desplazamiento Doppler en el
dominio de la frecuencia. En una situación multitrayecto, que envuelve movimiento, el
espectro de salida del canal puede ser la superposición de varias versiones del espectro de
entrada desplazado.
El canal puede además ser caracterizado en términos de intervalos discretos (i·∆v) como la
suma
∑ ∆∆×∆−≈i
vfviHvifZfW );()()( (2.31a)
∫∞
∞−
−= dvfvHvfZ );()( (2.31b)
de la ecuación (2.31b) se observa que el espectro de salida del canal es la suma ponderada
de las versiones desplazadas del espectro de entrada, como se ilustra en la figura 2.7.
El grado de dispersión Doppler es caracterizado por Fs (Dispersor Doppler) el cual es
definido como la raíz-cuadrática-media del segundo momento de H(v;f)
dvfvHvFs );()( 22 ∫∞
∞−
∆ (2.32)
EntradaZ(f)
Sumatoria
Desplazamientos en frecuencia
H(1;f) H(2;f) H(3;f) …H(N;f)
SalidaW(f)
Figura 2.7, El espectro de salida es una suma ponderada de los desplazamientos del
espectro de entrada.
50

H(ν;f)
Fs
ν Figura 2.8, Relación del dispersor Doppler a la distribución de desplazamiento de
frecuencia ν.
2.2.4 Dispersión en Tiempo y en Frecuencia Combinados.
La función de dispersión de retardo se ha utilizado para modelar el canal de propagación
con desplazamientos en el dominio del tiempo. Estos retardos son causados por la reflexión
de la señal sobre múltiples objetos. El canal con dispersión de retardo es modelado con la
convolución de la función de dispersión de retardo y la función de entrada. De forma
similar la función de dispersión Doppler modela el canal con desplazamientos en el
dominio de la frecuencia. Estos desplazamientos en la frecuencia se deben al movimiento
de los objetos dispersores. El canal con dispersión Doppler es modelado por la
convolución de la función de dispersión Doppler y la entrada en el dominio de la
frecuencia. Estos modelos envuelven una simple convolución y/o la transformada de
Fourier. Ahora se plantea la combinación de los dos modelos de canal para producir un
modelo que incluye tanto a la convolución como a la transformada de Fourier.
La salida del canal puede ser escrita como:
(2.33a) τττω z∫∞
−= ;)(
(2.33b) τπ∫ ∫ ττ ddvevUtz
dtgtt
vtj∞
∞−
∞
∞−
∞−
−= 2);()(
)(()
51

En la cual U(τ;v) se introduce como la transformada de Fourier de g(τ;t) con respecto a la
variación temporal del canal:
∫∞
∞−
−∆ dtetgvU vtj πττ 2);();( (2.34)
U(τ;v) es una función de dispersión de retardo-Doppler que modela tanto dispersión en
retardo del tiempo como en dispersión en desplazamiento de frecuencia, donde el canal de
salida puede ser visto como la suma ponderada de los retardos y corrimientos de frecuencia
en la entrada.
∑∑ ∆×∆∆×∆−∆∆≈i k
vtkjevkiUitzvt πτττω 2);()()( (2.35a)
∫∫∞
∞−
∞
∞−
−= τττ π dvdevUtz vtj2);()( (2.35b)
2.3 Tasa de Desvanecimientos [1]
2.3.1 Caracterización del Canal Aleatorio de Desvanecimientos
Se demostró que los efectos de un canal dispersivo en tiempo o en frecuencia pueden ser
modelados escribiendo su salida w(t) como la superposición de réplicas retardadas de la
entrada del canal z(t).
52

[ ]∑ −=n
nn ttztt )()()( ταω (2.36)
Con el efecto sobre la envolvente compleja respectiva con relación a la frecuencia central
f0 siendo modelada por:
[ ] )(02)()(,)()()(
tnfj
nnn
nn ettttzttτπ
ααταω−
=′−′= ∑ (2.37a)
La función de dispersión de retardo-variante en el tiempo que corresponde a este modelo
es:
[∑ −′=n
nn tttg )()();( ττδατ ] (2.37b)
Los factores de atenuación variantes en el tiempo{ })(tnα′ , son números complejos que
representan las pérdidas de propagación y los desplazamientos de fase de la frecuencia
central en las trayectorias individuales indexadas con n. Un tipo de desvanecimiento en la
señal recibida ocurre cuando se mueven ya sea el transmisor o el receptor, causando
variación en las pérdidas de propagación. Los retardos en tiempo {τn(t)} son números
reales que representan los retardos de una trayectoria. La tasa a la cual esos retardos varían
influencia fuertemente los efectos del canal multitrayecto sobre la señal.
Suponiendo que la señal transmitida es una senoide de amplitud unitaria a
frecuencia f0 y que no hay movimiento relativo entre el transmisor y el receptor. Entonces
la envolvente compleja de la señal y su transformada de Fourier son:
)()(1)( ffZytz δ== (2.38a)
53

La envolvente compleja de la salida del canal en el dominio del tiempo es:
∫∞
∞−
= ττ dtgtw );(.1)(
∑∑∑ −− ==′=n
tnjn
n
tnfjn
nn etett )()(02 )()()( θτπ ααα (2.38b)
Las variaciones en el tiempo de los factores de atenuación { })(tnα es usualmente
insignificante excepto para grandes cambios dinámicos en el medio. Sin embargo los
ángulos de fase {θn(t)} pueden cambiar rápidamente en 2π, mientras un retardo τn varia tan
solo en ± 1/f0
Los retardos en el tiempo pueden variar aleatoriamente y a diferentes tasas. El
efecto neto de esta variación es producir una envolvente compleja a la salida del canal que
puede ser modelada en el dominio del tiempo como un proceso aleatorio gaussiano
complejo. En este caso la función de dispersión de retardo puede verse como un proceso
aleatorio Gaussiano complejo de la variable t. La variación en la envolvente compleja de
salida es conocida como desvanecimiento (fading). La magnitud de un proceso Gaussiano
complejo de media cero );( tg τ es una variable aleatoria de distribución Rayleigh. Por esta
razón el fenómeno creado por variaciones en los retardos de tiempo es denominado
desvanecimiento tipo Rayleigh.
Dado que la función de dispersión de retardo );( tg τ es una variable aleatoria
Gaussiana de media cero, esta puede ser descrita por la función de correlación:
{ );();(21);( * ttgtgEtRg ∆+∆∆ τττ } (2.39)
54

en la cual el asterisco (*) denota el complejo conjugado. En el caso especial de no
invariante en tiempo la función de correlación es llamada perfil de intensidad
multitrayectoria )();( τφτ gg tR ≡ . Esta función puede tomar la forma [21]:
0/)( ,)( 0 τττφ ττ ≥= −− mT
g Ke (2.40)
El valor Tm es una medida alternativa de dispersión de retardo, que es aplicada a medios
aleatorios donde ∆τ se ha usado previamente.
Dado que T(f,t) es un proceso aleatorio Gaussiano complejo de media cero, este puede ser
descrito por la función de correlación:
{ });();(21);( * ttffTtfTEtfRT ∆+∆+∆∆∆ (2.41)
Esta función es algunas veces llamada función de correlación de canal frecuencia-espaciada
tiempo-espaciado [22]. Para el caso invariante en tiempo RT(∆f,0) = φT(∆f) es la
transformada de Fourier de φg(τ):
∫∞
∞−
∆−=∆ ττφφ τπ def gfj
T )()( 2 (2.42)
Usando el modelo exponencial de (2.40), el valor de φT(∆f) es:
∫∞
−−∆− ⋅=∆0
0 /)(2)(τ
τττπ τφ dKeef mTfjT (2.43a)
m
fjm
TfjeKT
)(21
02
∆+=
∆−
π
τπ
(2.43b)
55

donde la magnitud de la función de correlación en el dominio de la frecuencia: |φT(∆f)| es
máximo en ∆f=0 y que cae a ½ de su valor para 2π(∆f)Tm = 1. Así que βc=1/Tm puede ser
definida como una medida del ancho de banda de coherencia del canal aleatorio.
Cuando βc =1/Tm es pequeño en comparación con el ancho de banda de la señal Ws,
el contenido de frecuencia de la señal es distorsionado por el canal y se dice que el
desvanecimiento del canal es selectivo en frecuencia, lo cual tiene el mismo significado que
dispersivo en tiempo, dado que un Bc pequeño es equivalente a un Tm grande.
1>>= msc
s TWWβ
Dispersivo en tiempo o selectivo en frecuencia (2.44)
Cuando βc =1/Tm es grande comparado con el ancho de banda de la señal, el contenido de
frecuencia de la señal no es distorsionado por el canal y se dice que el desvanecimiento
del canal es plano en frecuencia.
1<<= msc
s TWWβ
No- dispersivo en tiempo o plano en frecuencia (2.45)
Cuando el ancho de banda de la señal excede ampliamente el ancho de banda de coherencia
del canal, se sigue que la duración del símbolo es mucho mas pequeña que la dispersión de
retardo, permitiendo la resolución de componentes de multitrayecto.
csW β>> c
ms
s TW β
11=<<=T (2.46)
Cuando el ancho de banda de la señal es mucho menor que el ancho de banda de
coherencia del canal, se sigue que la duración del símbolo es mas grande que la dispersión
de retardo. Esto reduce la interferencia intersímbolo debido a las trayectorias múltiples
pero las trayectorias como tales no se pueden resolver.
56

csW β<< c
ms
s TW β
11=>>=T (2.47)
De forma similar a la función de correlación frecuencia-espaciada RT(∆t;0) = φT(∆f), se
puede definir una función de correlación tiempo-espaciada como RT(0,∆t) = ψT(∆t) [22].
Es posible obtener la transformada de Fourier de la función de correlación
frecuencia espaciada-tiempo espaciado con respecto a ∆t. La transformada respecto al
parámetro del tiempo nos representa el contenido en frecuencia (desplazamiento Doppler)
de las variaciones en tiempo del canal.
{ });();( tfRfS TT ∆∆ℑ∆∆ λ (2.48a)
∫∞
∞−
∆− ∆∆∆= )();( )(2 tdetfR tjT
πλ (2.48b)
Para el caso particular de ∆f=0, tenemos:
∫∞
∞−
∆− ∆∆=≡ )()();0()( )(2 tdetSS tjTT
πλψλλ (2.49)
El cual es llamado el espectro de potencia Doppler del canal aleatorio [22]. El ancho de
banda de S(λ) es conocido como la dispersión Doppler del canal y puede denotarse como
βd. Debido a que S(λ) y ψT(∆t) son un par de transformadas de Fourier, entendemos que
un βd grande corresponde a un tiempo de correlación corto (tiempo de coherencia Tc) en
T(f;t) o desvanecimiento rápido. De forma similar un βd corto corresponde a un tiempo de
correlación largo en T(f;t) o desvanecimiento lento.
57

Un resumen de las relaciones entre la función de correlación frecuencia-espaciada y el
perfil de intensidad multitrayecto, así como de la relación entre la función de correlación
de tiempo-espaciado y el espectro de potencia Doppler se muestra en la figura 2.9.
DisAncho de banda de coherencia,βc
∆f
βc
Función de correlación frecuencia-espaciada Intensidad multitrayecto
β≅1/Tφg(τ)
φg(τ) |φT(∆f)|
φT(∆f)
∆tDiTiempo de coherencia, Tc
Función de correlación tiempo-espaciado
Tc≅1/βd
|ΨT(∆t)|
Tc ΨT(∆t) S(λ)
Espec
Figura 2.9 Resumen de las características del canal de
T
persión de retardo,Tm
spersión Doppler, βd
βd
S(λ)
tro de potencia Doppler
radio móvil.
58

2.3.2 Terminología Utilizada en Desvanecimientos
Varios términos usados comúnmente describen el canal de desvanecimientos. Entre ellos
los llamados desvanecimientos de termino-largo y desvanecimientos de término-corto, los
cuales se relacionan con el promedio local e instantáneo de los niveles de la señal.
El desvanecimiento de frecuencia selectiva como su nombre lo dice, afecta solo
ciertas frecuencias. El desvanecimiento selectivo en tiempo afecta de manera análoga en el
dominio del tiempo. Un canal que es selectivo tanto en tiempo como en frecuencia se dice
que es de doble dispersión. En un canal de desvanecimiento plano, no hay mecanismos de
desvanecimientos dominante, pero el desvanecimiento ocurre debido a las fluctuaciones
del canal aleatorio.
Las fluctuaciones en el nivel de la señal recibida, que son ocasionadas debido al
movimiento de los usuarios radio-móviles llamadas desvanecimientos, se derivan de varios
efectos. Entre estos se incluye la variación en las pérdidas de trayecto, cuando el receptor o
transmisor se mueven. Las variaciones en las pérdidas de trayecto y la interferencia pueden
ser causadas por el movimiento de los obstáculos mientras el transmisor y el receptor están
estacionarios. Además se agrega un efecto que es causado por las variaciones en la
atmósfera.
En la figura 2.10 se muestra un gráfica del nivel de la señal recibida, por un receptor
móvil mientras que este se mueve en la zona de cobertura. en la cual se muestran dos
componentes principales. El primero son las fluctuaciones rápidas de la señal y el segundo
las variaciones lentas de la señal, la cual es obtenida del promedio local de la señal. El
desvanecimiento de termino-largo se asocia con los cambios lentos mientras que el
desvanecimiento de término-corto se asocia con los cambios rápidos.
59

Fuerza de la señal en
Tiempo
Valor
Figura 2.10 Desvanecimientos de término largo y término corto.
El nivel de la señal recibida en decibeles sería, la suma de los términos largo y corto,
)()()( )()arg( tVtVtV cortodB
oldBdB += (2.50a)
Por lo tanto en escala absoluta, el nivel de la señal en función del tiempo, es el producto del
termino largo y termino corto.
)()()( )()arg( tVtVtV cortool ×= (2.50b)
En general el término largo de desvanecimientos es debido a factores de propagación,
mientras que el término corto es debido al multitrayecto (Desvanecimientos Rayleigh).
Cuando el canal es dispersivo en tiempo, es decir que estrecha los pulsos en el
tiempo debido a la propagación multitrayecto, la combinación de retardos en el tiempo
tiene un efecto de dependencia de la frecuencia sobre la señal. Los términos frecuencia
selectiva y dispersión en tiempo son equivalentes.
60

Un canal es considerado selectivo en frecuencia cuando la dispersión de retardo es mucho
mas grande que el inverso del ancho de banda y se expresa como:
sW/1>>∆τ (2.51)
Si el canal tiene una dispersión de retardo significativa pero una dispersión Doppler
insignificante, éste puede ser descrito como un canal plano dispersivo en tiempo.
Cuando el canal es dispersivo en frecuencia ,es decir que estrecha el ancho de banda
de la señal en el dominio de la frecuencia debido al efecto Doppler, la combinación del
desplazamiento Doppler tiene un efecto de dependencia en el tiempo sobre la señal. Los
términos selectivo en tiempo y dispersivo en frecuencia son equivalentes. Un canal es
considerado selectivo en tiempo cuando la dispersión Doppler es significativamente más
grande el ancho de banda de la señal.
ss WF >> (2.52)
Si el canal tiene una dispersión Doppler significativa pero una dispersión de retardo
insignificante, este puede ser descrito como un canal plano dispersivo en frecuencia.
Si el canal tiene tanto una dispersión de retardo significativo como una dispersión
Doppler significativa, este es descrito como selectivo en tiempo y frecuencia, o dispersivo
en tiempo y frecuencia, o simplemente doblemente dispersivo. En términos del ancho de
banda de las señales, los canales doblemente dispersivos son aquellos para los que:
sss WFyW >>>>∆ /1τ (2.53)
El termino desvanecimiento plano se refiere a la situación en donde ni la dispersión
de retardo ni la dispersión Doppler son significativos. En términos de ancho de banda, los
canales de desvanecimiento plano son aquellos para los que:
sss WFyW <<<<∆ /1τ (2.54)
61

Las variaciones que en la recepción dan lugar al desvanecimiento ocurren en el tiempo.
Sin embargo para el canal de desvanecimiento plano, éstos son asociados con la
aleatoriedad del canal más que con el movimiento o con otras fuentes de variación en el
tiempo.
Un resumen de los tipos de canales de desvanecimiento se presentan en la figura 2.11.
1=ssTW
11,1 <<=<<=
⇓
<<<<
ccmdccss
cscs
TTTTW
TTyW
βββ
β
• Plano, desvanecimientos lento
• Una trayectoria aparente
• Canal constante durante el símbolo
cscs TTyW >><<β
• Plano, desvanecimientos rápido
• Una trayectoria aparente
• El canal varía durante el símbolo
cscs TTyW <<>> β
• Selectivo en frecuencia,
desvanecimientos lento
• Resuelve múltiples trayectos
• Canal constante durante el símbolo
11,1 >>=>>=
⇓
>>>>
ccmdccss
cscs
TTTTW
TTyW
βββ
β
• Selectivo de frecuencias,
desvanecimientos rápido
• Resuelve múltiples trayectos
• El canal varía durante el símbolo
Tabla 2.2 Resumen de los tipos de canales de desvanecimiento.
62

CAPÍTULO III
DESCRIPCIÓN DEL SISTEMA
3.1 Consideraciones de Diseño
La simulación en computadoras ha llegado a convertirse en una técnica popular para la
evaluación del desempeño de sistemas de comunicaciones. En esta técnica todos los
componentes de principio a fin del enlace de comunicaciones deben ser representados con
adecuada fidelidad.
Los procesos de simulación y modelado son frecuentemente aplicados en diferentes
estados del ciclo de vida de ingeniería de sistemas. En el estado de conceptualización, la
simulación es típicamente usada para explorar que sucede si cambian los escenarios en
diseño. En el diseño de sistemas inalámbricos por ejemplo, el diseñador puede seleccionar
de entre varios tipos de receptores y cambiar los tipos de uso de suelo para entonces
realizar las pruebas de tasa de tramas erróneas (FER) hasta determinar el esquema más
conveniente para el tipo de canal de comunicaciones en consideración.
Una de las grandes ventajas del simulador es la caracterización del desempeño
estadístico del sistema en estudio. En muchas ocasiones los eventos a ser caracterizados
ocurren solo en raras ocasiones, por ejemplo la tasa de bits erróneos (BER). En casos como
éste, es necesario generar una correspondiente cantidad de datos para asegurar el
significado estadístico de los resultados. Es prudente observar de 10 a 100 de los eventos
que son caracterizados estadísticamente, es decir de 10 a 100 veces el inverso de la tasa de
bits erróneos.
Por ejemplo para una tasa de bits erróneos de 10-5, es recomendable observar:
( ) 75 1010100 = bits.
63

En la figura 3.1 se muestra un esquema general del simulador del sistema de comunicación
de espectro disperso. El programa realizado en MATLAB 5.2 tiene tres bloques principales;
el primero asociado a las características y parámetros del transmisor, donde es posible
incorporar hasta 20 transmisores operando de manera simultanea, el siguiente modulo
corresponde al canal, el cual permite manipular las condiciones del medio al agregar
atenuación, ruido y desvanecimientos lentos. Finalmente se tiene el módulo del receptor
donde se recibe la señal que ha “viajado” a través del canal. El receptor del tipo
correlacionador utilizará la secuencia o código del primer transmisor para demodular los
datos, además un segundo demodulador recupera bits de código (chips). El demodulador
presenta en tiempo real una estadística para tasa de bits erróneos (BER), tasa de chips
erróneos (CER) y tasa de trama erróneas (FER). Finalmente se presenta un resumen de
resultados estadísticos y las gráficas de la simulación del desempeño del sistema.
Figura 3.1 Diagrama general del sistema de comunicación implementado.
64

3.2 La Estructura General del Programa
En la figura 3.2 se muestra un esquema general de los bloques principales que componen el
programa realizado Desde la pantalla principal (figura 3.3) se invocan hasta 37
subprogramas durante toda la simulación. Desde la pantalla principal es posible abrir y
manipular, el bloque transmisor, el canal, el receptor y una pantalla de resultados.
En el módulo del transmisor se configuran los parámetros del tipo de modulación,
los datos de información, el tipo de códigos de expansión utilizados y la potencia de
transmisión. Hasta 20 transmisores pueden ser utilizados para simular interferencia de
acceso múltiple (MAI).
En el módulo del canal se incorporan los bloques de pérdidas de trayecto, ruido y
desvanecimientos. El bloque de pérdidas permite seleccionar el modelo del espacio libre o
el modelo empírico de Hata, también es posible introducir un valor de pérdidas por el
teclado. En el bloque de ruido se incorporan el ruido blanco gaussiano aditivo y ruido con
distribución uniforme. El bloque de desvanecimientos permite incorporar desvanecimientos
lentos tipo log-normal.
POTENCIA
CÓDIGOS
DATOS
TRANSMISORSS-BPSK
HATA ESP. LIBRE
PÉRDIDAS
RBGA UNIFORME
RUIDO
LOG-NORMAL
FADING
CANAL RECEPTORES ESTADÍSTICAS
PRINCIPAL
Figura 3.2 Diagrama a bloques del sistema.
65

En el receptor se consideran dos demoduladores. Con el fin de recuperar chips se tiene un
demodulador BPSK (Binary Phase Shift Keying), mientras que para la recuperación de los
10 bits transmitidos por el primer modulador, se tiene un SS-BPSK (Spread Spectrum
Binary Phase Shift Keying). Cuando se ejecuta el botón BER del menú principal, el
programa llama a los dos demoduladores, después guarda en una matriz los resultados y
regresa al canal, donde agrega nuevamente ruido y atenuación para demodular nuevamente
tanto bits como chips, esto se convierte en un proceso iterativo para el estudio de grandes
cantidades de tramas según sea el caso de estudio.
Figura 3.3 Pantalla principal del simulador.
66

3.2.1 El Transmisor
El transmisor utilizado es un SS-BPSK (Spread Spetrum Binary Phase Shift Keying), en la
figura 3.4 se muestra el esquema general del transmisor implementado. Tanto los datos a
transmitir como la amplitud de la señal y los tipos de códigos son manipulables para
simular acceso múltiple de hasta 20 usuarios.
An
A2
A1
Dn
Cn Cos(ωt)
X X X
D2
C2 Cos(ωt)
X X X
D1
C1 Cos(ωt)
X X X
∑
Figura 3.4 Esquema general del transmisor implementado.
En la figura 3.5 se muestra la pantalla del transmisor, en la cual se lleva a cabo la
generación aleatoria o bien la introducción de los datos que forman una trama, también se
lleva a cabo la selección de los códigos y la amplitud utilizada para el modulador SS-
BPSK. Estos datos se guardan en una matriz temporal, para su manipulación posterior en el
canal. La primera gráfica muestra los datos de entrada (izquierda) y la segunda los 3
67

primeros chips de la señal de salida modulada SS-BPSK (derecha). En el recuadro blanco
(abajo) se observan los datos que han sido utilizados para generar la salida modulada.
El recuadro del centro de la pantalla (arriba) se indica el número de modulador que se
ejecuta. Es posible repetir el proceso hasta 20 veces, para generar 20 transmisiones
simultáneas en CDMA (Code Division Multiple Access).
Figura 3.5 Pantalla del transmisor.
3.2.1.1 Secuencias PN Para la generación de las secuencias PN (Pseudo Noise) se ha implementado en el
simulador el arreglo de la figura 3.6 , el cual utiliza un mecanismo de Galois.
68

a R1 R2 R3 R4 R5 + P(0)
Figura 3.6 Arreglo de registros utilizado para la generación de secuencias simulador.
Utilizando una carga inicial de todos 1s y se generaron 26-1=63 códigos o secu
bits cada uno. La secuencia PN generada por el arreglo de la figura 3.6 es la sig
PN1=[0,1,0,1,0,1,1,0,0,1,1,0,1,1,1,0,1,1,0,1,0,0,1,0,0,1,1,1,0,0,0,1,0,1,1,1,1,0,0
,1,0,0,0,0,1,0,0,0,0,0,1,1,1,1,1,1]
Las otras 62 secuencias son generadas por un desfasamiento de 1 bit en
original. La función de autocorrelación de la secuencia PN1 se muestra en l
donde el eje horizontal muestra los 63 códigos y el eje vertical la
autocorrelación de la secuencia PN1 con las restantes 62 secuencias PN.
AUTOCORRELACIÓN
NÚMERO DE CÓDIGO
Figura 3.7 La función de autocorrelación de la secuencia PN generada.
Esta importante característica de correlación en secuencias PN permite la si
del transmisor y el receptor. El receptor va desfasando la secuencia de
compara con su propia secuencia hasta conseguir la máxima correlación (ve
Salid
PN del
encias de 63
uiente:
,1,0,1,0,0,0,1
la secuencia
a figura 3.7,
función de
ncronización
entrada y la
r figura 3.7),
69

que indica que las secuencias están alineadas. En cualquier otro caso la correlación será
baja (-1).
Se puede demostrar fácilmente que las secuencias PN cumplen las tres propiedades que un
código debe tener para ser usado en acceso múltiple (ecuaciones 1.2 y 1.3).
Con el fin de ajustar el tamaño de los códigos a 64 se agregó un cero al inicio de
cada secuencia1. La secuencia PN ajustada es la siguiente:
PN1=[0,0,1,0,1,0,1,1,0,0,1,1,0,1,1,1,0,1,1,0,1,0,0,1,0,0,1,1,1,0,0,0,1,0,1,1,1,1,0,0,1,0,1,0,0,0
,1,1,0,0,0,0,1,0,0,0,0,0,1,1,1,1,1,1]
Ahora tenemos 64 códigos, pero a cambio de este ajuste se ha perdido cierta
ortogonalidad. Su función de autocorrelación se ve modificada en la figura 3.8.
AUTOCORRELACIÓN
NÚMERO DE CÓDIGO
Figura 3.8 Función de autocorrelación de las secuencias PN ajustadas.
Esta es la secuencia PN que utiliza el simulador. Se puede observar que se mantiene cierta
ortogonalidad y el beneficio de tener una buena función de correlación. La ortogonalidad
garantiza el rechazo a la información que no va destinada a nuestro receptor, mientras que
70
1 Esta operación también se realiza en el estándar IS-95.

la función de autocorrelación permite sincronizar transmisor y receptor, e identificar la
señal (o estación base) que nos corresponde.
3.2.1.2 Códigos Walsh
En base a la matriz de Hadamard (ecuación 1.12) se construyó un conjunto de códigos
ortogonales de 64 bits. La figura 3.9 muestra los primeros 42 códigos Walsh utilizados.
Figura 3.9 Códigos Walsh.
71

ORTOGONALIDAD
a)
NÚMERO DE CÓDIGO ORTOGONALIDAD
b)
NÚMERO DE CÓDIGO
Figura 3.10 Ortogonalidad de los Códigos. a) Códigos Walsh, b) Secuencias PN
ajustadas.
La figura 3.10 muestra una comparación de la ortogonalidad de los códigos Walsh y las
secuencias PN ajustadas. Para la obtención de las gráficas se han utilizado los códigos
Walsh H10 y la secuencia PN10. Se puede observar la perfecta ortogonalidad de los
códigos Walsh mientras que las secuencias PN presentan cierta variación alrededor de
cero.
3.2.2 Canal de Comunicaciones
En el canal, la suma de señales de distintos transmisores ha generado cierta interferencia
(en este caso debido a que los códigos no son perfectamente ortogonales), además de esto,
la señal va a sufrir de varios efectos más. Los efectos que se han incluido en el canal del
simulador son representativos de un canal de comunicaciones móvil: pérdidas de trayecto,
ruido y desvanecimientos.
72

EFECTOS CONSIDERADOS PARA EL CANAL DE COMUNICACIONES
Pérdidas de trayecto Ruido Desvanecimientos
lentos
Modelo de Hata Blanco Gaussiano
Aditivo(RBGA)
Espacio Libre
Modelo del usuario Distribución Uniforme
Log-normal
Tabla 3.1 Efectos del canal de comunicaciones.
Figura 3.11 Pantalla del canal de comunicaciones del simulador.
73

En la figura 3.11, la primera gráfica muestra la interferencia de señales y la segunda
muestra como la señal es corrompida por los efectos del canal de comunicaciones.
Las señales SS-BPSK de los transmisores, han sido sumadas en forma sincrónica en
el canal. Ahora se les ha agregado pérdidas de trayecto, ruido y desvanecimientos. En los
sistemas de espectro disperso normalmente el ruido en el canal es muchas veces mayor que
la potencia de las señales transmitidas, por lo que la señal en el canal aparenta ser una
función solo de ruido.
3.2.2.1 Ruido
Los tipos de ruido considerados en el canal son el de distribución normal (RBGA) y el de
distribución uniforme, aunque el tipo de ruido que caracteriza el canal de radio es RBGA,
se ha considerado con fines didácticos y de análisis el ruido con distribución uniforme.
El ruido blanco gaussiano aditivo es generado con una variable aleatoria gaussiana
con media cero y la desviación estándar depende de la amplitud del ruido:
Ruido = randn (10,64,189).*DEP
La función randn está incluida en MATLAB 5.2 y genera números aleatorios con
una distribución normal, de media cero y varianza unitaria. El ruido generado es
multiplicado por el factor DEP, que se introduce por el teclado como la amplitud de ruido.
En esta parte se puede solicitar al programa que despliegue la relación señal a ruido.
En el intervalo (0,1) se genera el ruido de distribución uniforme, los valores de la
matriz generada se desplazan 0.5 para obtener una media cero. Este ruido generado es
directamente sumado a la señal del canal, a la cual se le ha agregado previamente pérdidas
de trayecto:
Ruido = rand (10,64,189)-0.5 .*DEP
74

3.2.2.2 Desvanecimientos
El Desvanecimiento lento del tipo log-normal, es incorporado a las características del
canal móvil de radio, esto es con el fin de considerar el efecto de las zonas de sombra en la
propagación [1]. Para obtener la variable log-normal primero se genera una variable
aleatoria Gaussiana x(t), la cual se utiliza para generar una variable con distribución log-
normal [4]:
2010x
Lnσ
= (3.1)
Donde:
x: es una variable gaussiana con media cero y varianza unitaria.
σ: desviación estándar2
Una característica importante del desvanecimiento es su función de covarianza:
)()(),(cov 221121 txtxttx &&= (3.2)
Donde:
)()( 2211 txytx && : Son los primeros momentos centrales de cada realización.
Dado un conjunto de n variables denotadas como { } { }21 ,... xx , la covarianza de
y se define como:
),cov( ji xx
ix jx
jiji
jjiiji
xxxx
xxxx
−=
−−≡ ))((),cov( µµ (3.3)
Donde ii x=µ y jj x=µ son la media de y respectivamente. ix jx
La figura 3.12 muestra dos realizaciones de desvanecimientos típicos, donde se han
considerado 50 muestras. En la figura 3.13 se observa la función de covarianza de estas
dos realizaciones.
2 Para el modelo empírico de Longley-Rice σ varia entre 8 y 10 dB.
75

AMPLITUD
TIEMPO
Figura 3.12 Dos realizaciones de desvanecimiento.
Tiempo Covarianza
2 1.5
5 1.08
10 0.02
15 0.2
20 0.07
30 -0.26
40 -0.38
50 -0.05
Tabla 3.2 Valores de covarianza para la dos realizaciones de la figura 3.12.
COVARIANZA
TIEMPO
Figura 3.13 Función de covarianza para las dos realizaciones de la figura 3.12.
76

3.2.3 Receptor
En el receptor se consideran dos demoduladores. Con el fin de recuperar chips (bits de
código) se tiene un BPSK (Binary Phase Shift Keying), mientras que para la recuperación
de los 10 bits de datos transmitidos por el primer modulador, se tiene un SS-BPSK
(Spread Spectrum Binary Phase Shift Keying).
La figura 3.14 muestra la arquitectura del demodulador, el cual utiliza sincronía
perfecta entre transmisor y receptor. La decisión se toma al final del periodo Tch para cada
chip que arriba. Para recuperar bits la integración se realiza sobre un periodo Tb, es decir
cada 64 chips, al final del cual se toma la decisión.
Con el fin de analizar grandes cantidades de información, es posible entrar en un
ciclo de múltiples ensayos de transmisión y recepción. En este caso, el programa utiliza
los bits que se han elegido para transmitir y el código asignado en el primer demodulador,
sin embargo en cada ensayo el programa modifica las variables aleatorias para ruido, y
atenuación en el canal.
Cos (ω0t)
X
X
Figura 3.14 Arquitectura de
C1
Dispositivode
decisión
∫Tb
0
∫Tch
0
Chips
Dispositivode
decisión
Bits
l demodulador.
77

Se ha implementado en el receptor un sencillo esquema de detección de errores en tramas
por paridad, con esto se obtiene una estadística de tasa de tramas erróneas (FER)
detectadas.
3.2.4 Estadísticas
El programa cuenta con una pantalla para desplegar las estadísticas de la simulación, donde
se muestran resultados en forma gráfica y numérica para el número de tramas erróneas
(FER), número de bits erróneos (BER) y número de chips erróneos (CER) que han sido
detectados por el demodulador.
En la figura 3.15 las gráficas del centro muestran una comparación de los errores
detectados con las curvas de probabilidad de error esperados para BPSK y SS-BPSK en
RBGA. En la figura 3.15 se observa una gráfica de la probabilidad de error contra la
relación señal a ruido para BPSK (derecha) y otro para SS-BPSK (izquierda). Estos trazos
corresponden al desempeño del sistema en la recuperación de bits y chip respectivamente,
cuando el canal es RBGA.
El resultado de la simulación aparece con un asterisco (*), y representa la relación
S/N en el receptor contra la cantidad de errores encontrados en la simulación. Es posible
repetir el experimento para distintas relaciones S/N, entonces varios resultados serán
observados en la misma gráfica.
78

Figura 3.15 Pantalla de estadísticas del simulador.
3.3 Alcances y Limitaciones
Esta herramienta de simulación puede ser utilizada de múltiples maneras:
• Pueden probarse los límites de funcionalidad del sistema de espectro disperso en
CDMA.
• Puede realizarse la comparación de códigos de expansión, en términos de su
ortogonalidad, cuando se utilizan varios transmisores.
• Es posible simular la tasa de bits erróneos (BER), la tasa de chips erróneos (CER) y
la tasa de tramas erróneas (FER), para el sistema CDMA.
79

• Es posible, realizar comparaciones de la cantidad de errores que introducen las
distribuciones de ruido gaussiana o uniforme.
• Es posible calcular la atenuación para distintos tipos de uso de suelo, por ejemplo,
zona urbana, densa-urbana o espacio libre.
• Se puede simular para distintas potencias (efecto captura) en CDMA.
La facilidad en la manipulación de los datos y la visualización de las señales y gráficas es
un valor agregado en esta herramienta de simulación. La herramienta de software
presentada, puede de ser de utilidad tanto para estudiantes de la carrera de ingeniería en
comunicaciones como para ingenieros de diseño de sistemas.
80

CAPÍTULO IV
APLICACIONES
4.1 Interferencia Introducida por Multicanalización en CDMA
Sabemos que tanto los códigos Walsh como las secuencias PN pueden ser utilizadas para
ensanchar la información de banda base y obtener espectro disperso, no obstante estos
códigos de expansión poseen diferentes propiedades. La propiedad de ortogonalidad,
permite al receptor rechazar toda la información que no va dirigida hacia él, así, tenemos
que mientras que los códigos Walsh son perfectamente ortogonales, las secuencias PN no lo
son, sin embargo la utilización de secuencias PN está justificada por su función de
correlación, la cual, permite sincronizar el transmisor con el receptor. La secuencias PN
utilizadas, pueden considerarse como un código único, a partir del cual se generan otros
códigos mediante desplazamientos del código original.
En tiempo discreto las dos secuencias x y y son ortogonales si se cumple la
siguiente relación:
= 0 ∑=
==l
iii
Txy yxyxR
1
En la figura 4.1 se tiene una comparación de la ortogonalidad para ambos tipos de
códigos. En este caso se han utilizado los códigos Walsh H10 y PN10. De la observación
de las gráficas es claro que las secuencias PN introducirán interferencia adicional al
sistema, interferencia que redundará en un aumento de la tasa de bits erróneos.
81

Figu
4.1.1
A m
aume
al ca
buen
códig
usuar
que s
ortogonalidad
d
n
a
ortogonalida
ra 4.1 Comparación de la ortogonalidad de los códigos
Planteamiento del Problema
edida que el número de usuarios aumenta, también, la
nta. Es necesario medir la cantidad de usuarios que puede
al sin que se rebase la relación señal a ruido mínima ne
comunicación.
La simulación, nos permitirá determinar, en que medi
os Walsh, son capaces de rechazar efectivamente la inter
ios en el sistema CDMA, realizando una comparación con
e introducen debido a la no ortogonalidad de las secuencia
número de código
W
número de código
alsh y secuencias PN.interferencia en el canal
n acceder simultáneamente
cesaria para establecer una
da la ortogonalidad de los
ferencia, causada por otros
la cantidad de bits erróneos
s PN ajustadas.
82

4.1.2 Datos de Entrada al Simulador
Tomando la curva de la tasa de bits erróneos para el canal RBGA en SS-BPSK (ver figura
4.2) como referencia, realizaremos una simulación para medir la ortogonalidad de los
códigos en términos de la tasa de bits erróneos. Observaremos cuantos bits erróneos
adicionales causa la interferencia de 20 transmisores que operan simultáneamente, tanto
para secuencias PN como para códigos Walsh.
Se alimentará el sistema con los datos mostrados en la tabla 4.1 y se analizarán
1200 bits para ambos casos.
TRANSMISOR CANAL DEMODULADOR
Amplitud
Tx
10
Modulación SS-BPSK
Pérdidas Esp. Libre
0.1km & 800mhz
Walsh
(H2-H21) Códigos
2.Secuencias
(PN1-pn20)
Ruido RBGA
0.03 m.
SS-BPSK
Tabla 4.1 Datos de estrada al simulador para la aplicación 4.1.
4.1.3 Resultados
La figura 5.2 muestra el resultado de la simulación para 20 usuarios utilizando secuencias
PN ajustadas. Al unir los puntos sobre la curva para SS-BPSK (ver figura 4.2), se obtiene
83

una gráfica con la cantidad de errores para 20 transmisores simultáneos utilizando
secuencias de expansión PN ajustadas. En comparación con la curva para SS-BPSK
correspondiente a la probabilidad de error para un solo usuario, se observa un aumento en
la probabilidad de error cuando el número de usuarios se incrementa a 20.
BPSK
SS-BPSK
Figura 4.2 Resultado de la simulación para secuencias PN ajustadas.
RBGA
(m)
bits
Erroneos
0.03 51/1200
0.02 10/1200
0.15 2/1200
Tabla 4.2 Resultado de la simulación para secuencias PN ajustadas.
84

En la figura 4.3 se muestra el resultado de la simulación para 20 usuarios utilizando códigos
Walsh. Al unir los puntos alrededor de la curva para SS-BPSK en RBGA se obtiene una
gráfica de la cantidad de errores para 20 transmisores simultáneos utilizando códigos
Walsh. En comparación con la probabilidad de error para un solo usuario se observa que la
probabilidad de error para 20 usuarios se mantiene constante cuando se utilizan códigos
Walsh en SS-BPSK.
SS-BPSK
Figura 4.3 Resultado de la simulación para códigos Walsh.
RBGA
(M)
BITS
ERRONEOS
0.03 6/1200
0.04 44/1200
0.55 111/1200
Tabla 4.3 Resultado de la simulación para códigos Walsh.
BPSK
85

4.1.4 Conclusiones
• Cuando se realiza la expansión con códigos Walsh, la tasa de bits erróneos se
mantiene independiente del numero de transmisores en el sistema e igual a tasa de
bits erróneos para un solo transmisor.
• Al realizar la expansión con secuencias PN ajustadas, se observa un incremento de
la tasa de bits erróneos, proporcional al número de usuarios en el sistema.
• Los sistemas prácticos pueden utilizar los códigos Walsh para expandir la
información de banda base, mientras que las secuencias PN pueden agregarse para
sincronizar el transmisor y el receptor, sin embargo debe tenerse en cuenta, que la
utilización de secuencias PN introducirá interferencia en el sistema.
86

4.2 Simulación del Desempeño CDMA Sobre el Canal RBGA
Se presentan resultados de la simulación para el canal RBGA, con 5, 10, 15 y 20 usuarios
cuando acceden al sistema CDMA. En este caso se han utilizado secuencias PN ajustadas.
La simulación se realizó sobre un rango de 500 a 20,000 bits. Para un tiempo total de
proceso de 21 horas, en una computadora personal con procesador de 900 Mhz. Durante la
simulación se asume que todos los usuarios transmiten a la misma potencia y se asume que
existe sincronía perfecta entre transmisor y receptor.
Tasa de bits Erróneos (BER) S/N
(en el canal) 1
USUARIO
(azul)
10
USUARIOS
(rojo)
15
USUARIOS
(verde)
20
USUARIOS
(negro)
0.019 0.052 0.052 0.061 0.16
0.028 0.011 0.013 0.015 0.078
0.038 0.0008 0.0018 0.0027 0.04
0.048 0.0001 0.0011 0.026 0.00035
Tabla 4.4 Resultados de la simulación S/N contra BER.
87

BER
( --+-- ) 1 USUARIO ( *- ) 10 USUARIOS (∆) 15 USUARIOS ( ) 20 USUARIOS
S/N
Figura 4.4 Resultados de la simulación del canal RBGA en CDMA.
En la figura 4.4. se observan los resultados de la simulación CDMA sobre el canal RBGA.
Como se esperaba, el sistema está limitado debido a la interferencia que se causa cuando
varios usuarios acceden en forma simultanea. Sin embargo puede esperarse un buen
rendimiento cuando el sistema opera por debajo de 15 usuarios.
88

4.3 Simulación del Desempeño CDMA Sobre un Canal con
Desvanecimientos y RBGA
Se presentan resultados de la simulación para el canal RBGA con desvanecimientos lentos
tipo log-normal para un usuario. En este caso se ha utilizado el código Walsh H2. La
simulación se realizó sobre un rango de 500 a 3,000 bits. Durante la simulación se asume
que existe sincronía perfecta entre transmisor y receptor. Se alimentó el sistema con los
datos mostrados en la tabla 4.5. Los resultados se muestran en la figura 4.5
TRANSMISOR CANAL DEMODULADOR
Amplitud
Tx
1
Modulación
SS-BPSK
Pérdidas Espacio Libre
1KM & 1 MHZ
Desvaneci-
mientos Log-Normal (σ=10)
Códigos Walsh
(H2)
ruido RBGA
30M - 9M
SS-BPSK
BPSK
Tabla 4.5 Datos de estrada al simulador para la aplicación 4.3.
89

BPSK
SS-BPSK
Figura 4.5 Resultados de la simulación S/N contra BER, para un canal con RBGA y desvanecimientos.
La figura 4.5 muestra los resultados de la simulación S/N contra BER, para un canal con
RBGA y desvanecimientos en SS-BPSK. Al unir los puntos (los cuales están sobre la curva
para un usuario SS-BPSK) , se tiene una curva de la tasa de bits erróneos para el canal con
ruido RBGA y desvanecimientos lentos tipo log-normal. Comparándola con la gráfica de
valores esperados para un usuario sobre el canal RBGA en SS-BPSK, se observa un
aumento considerable en la tasa de bits erróneos a causa de los desvanecimientos en el
canal.
90

CAPÍTULO V
CONCLUSIONES Se ha implementado un simulador para un sistema de comunicaciones de espectro disperso
de secuencia directa. Las tramas transmitidas fueron corrompidas por un canal con
atenuación, ruido, interferencia de acceso múltiple (MAI) y desvanecimientos lentos tipo
log normal. En el receptor se calculó la tasa de bits erróneos (BER), la tasa de tramas
erróneas (FER) y la tasa de chips erróneos.
El simulador desarrollado puede ser una excelente herramienta para evaluar el
desempeño de sistemas de comunicación de espectro disperso de secuencia directa sobre
distintos escenarios. Las graficas de las señales durante la programación lo hacen
especialmente atractivo para fines educativos y de investigación. El desarrollo por módulos
hace que el simulador sea bastante flexible para incorporar nuevos modelos.
5.1 Trabajo Futuro
En el bloque transmisor es posible incorporar otros tipos de modulación, como por ejemplo
QPSK, también pueden incluirse filtros, antes de realizar la transmisión. En el módulo del
canal es posible incorporar nuevos modelos empíricos de propagación al simulador. El
simulador puede ser además mejorado al incluir canales multitrayecto conjuntamente con
los receptores de rastrillo.
91

BIBLIOGRAFÍA Y OTRAS FUENTES DE CONSULTA
[1] Jhon Sam Lee, Leonard E. Miller, “CDMA Systems Engineering Handbook”, Artech House.1998.
[2] Andrew J. Viterbi, CDMA Principles of Spread Spectrum Communications,
addison wesley 1995. [3] Simon R. Saunders, Antennas and Propagation for Wireless Communications
Systems,john Wiley & Sons,LTD.1999. [4] J.D. Parsons, The Mobile Radio Propagation Channel,Pentech Press,1994 [5] Wittman,J.H. ,” Categorization of múltiple access /Random access Modulation
Techniques.” ,IEEE Trans on comunication Technology, No 5, 1967. [6] Carey, R. B. “Technical Factors Afecting the Asingment of Facilities in the
Domestic Public Land Mobile Radio Service”, FCC Report 6406, june 1964. [7] Samuel C. Yang, “CDMA RF System Engineering”, Artech House.1998. [8] Ferrel. G. Stremler. Introduction to Communication Sistems, Ed. Pearson.
Addison Wesley Longman. Third Edition, 1990. [9] William C.Y. Lee, Mobile Communications, Desing Fundamentals, Second
Edition, Wiley, 1993. [10] William C.Y. Lee, Mobile Cellular Telecommunications, analog and digital
systems, Second Edition, Mc. Graw Hill 1995. [11] Hernando Rábanos José Ma., Manuel Montero del Pino, Fernando Pérez Fontán,
Ingeniería de Sistemas Trunking, editor SÍNTESIS. [12] Schwartz, M., Telecommunications Networks:Protocols,Modeling and Analysis,
New York, Addison Wesley,1987. 13] Estándar TIA / EIA / IS 95 A. [14] Estándar IEEE 802.11.
92

[15] Sanjit K. Mitra, Digital Signal Procesing, Editorial Mc.Graw Hill. [16] Análisis Numérico y Visualización Gráfica con MATLAB, Editorial P.H.H. [17] J.G. Proakis. Digital Communications, Ed. Mc. Graw Hill, Third Edition 1995. [18] Sánchez Meraz M, Castillo Soria Fco. Rubén, “Simulación de Comunicaciones de
Espectro Disperso”, VII Congreso Internacional de Ingeniería Informática ICIE 2001, Facultad de Ingeniería, Universidad de Buenos Aires, Argentina 2001.
[19] Sánchez Meraz M, Castillo Soria Fco. Rubén “Sistemas de simulación para
sistemas de comunicación de espectro disperso”,Revista, Científica ESIME Zacatenco, Abril 2001.
[20] Sánchez Meraz M, Castillo Soria Fco. Rubén, “Simulación de Interferencias en
CDMA”, III Congreso Internacional de Ingeniería Electromecánica y de sistemas ESIME 2002, Sección de Estudios de Postgrado e Investigación, Instituto Politécnico Nacional 2002.
[21] Bodson, D., G.F. McClure y S.R. McConoughley, eds., “Land Mobile
communications Engineering”, numero de publicación PCO1685, New York: IEEE Press,1984.
[22] Goldberg B. ed. “Communications Channels: Caracterization and behavior”,
New York: IEEE Press 1976
93


![Uni fiee scm sesion 11 cdma [modo de compatibilidad]](https://static.fdocuments.mx/doc/165x107/558a8d00d8b42a887a8b4598/uni-fiee-scm-sesion-11-cdma-modo-de-compatibilidad.jpg)















