IMPLEMENTACIÓN DE UN SISTEMA ABS EN EL SIMULADOR DE …
98
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL FACULTAD DE CIENCIAS DE LA INGENIERÍA E INDUSTRIAS CARRERA DE INGENIERÍA AUTOMOTRIZ IMPLEMENTACIÓN DE UN SISTEMA ABS EN EL SIMULADOR DE FRENOS POR DISCO-TAMBOR DEL TALLER DE INGENIERÍA AUTOMOTRIZ DE LA UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL. TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO AUTOMOTRIZ GUSTAVO GABRIEL MELÉNDEZ VISCARRA DIRECTOR: ING. EDUARDO CUEVA Quito, abril, 2017
Transcript of IMPLEMENTACIÓN DE UN SISTEMA ABS EN EL SIMULADOR DE …

UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL
FACULTAD DE CIENCIAS DE LA INGENIERÍA E
INDUSTRIAS
CARRERA DE INGENIERÍA AUTOMOTRIZ
IMPLEMENTACIÓN DE UN SISTEMA ABS EN EL
SIMULADOR DE FRENOS POR DISCO-TAMBOR DEL
TALLER DE INGENIERÍA AUTOMOTRIZ DE LA
UNIVERSIDAD TECNOLÓGICA EQUINOCCIAL.
TRABAJO PREVIO A LA OBTENCIÓN DEL TÍTULO
DE INGENIERO AUTOMOTRIZ
GUSTAVO GABRIEL MELÉNDEZ VISCARRA
DIRECTOR: ING. EDUARDO CUEVA
Quito, abril, 2017

© Universidad Tecnológica Equinoccial. 2017
Reservados todos los derechos de reproducción

FORMULARIO DE REGISTRO BIBLIOGRÁFICO
PROYECTO DE TITULACIÓN
DATOS DE CONTACTO
CÉDULA DE IDENTIDAD: 1724399280
APELLIDO Y NOMBRES: Gustavo Gabriel Meléndez Viscarra
DIRECCIÓN: Conocoto, Av. Abdón Calderón y Jambeli
N30B, OE1-87
EMAIL: [email protected]
TELÉFONO FIJO: 4504807
TELÉFONO MOVIL: 0983509795
DATOS DE LA OBRA
TITULO: Implementación de un sistema ABS en el
simulador de frenos por disco-tambor del
taller de Ingeniería Automotriz de la
Universidad Tecnológica Equinoccial.
AUTOR O AUTORES: Gustavo Meléndez
FECHA DE ENTREGA DEL PROYECTO
DE TITULACIÓN:
Abril de 2017
DIRECTOR DEL PROYECTO DE
TITULACIÓN:
Ing. Eduardo Cueva
PROGRAMA PREGRADO POSGRADO
TITULO POR EL QUE OPTA: Ingeniero Automotriz
RESUMEN: Mínimo 250 palabras
Se implementó el sistema ABS, al banco de frenos por disco-tambor existente en el taller de ingeniería automotriz de la universidad, para dar a conocer los componentes y el funcionamiento de este sistema de seguridad activa muy común en los vehículos que se comercializan hoy en día, para que además se pueda diferenciar la frenada de un vehículo que posee ABS y otro que no posea tomando como referencia las presiones y la distancia de frenado a las que son sometidos los discos de freno. Para lo anterior fue necesario adquirir todos los elementos electrónicos que componen un sistema ABS convencional como son: EBCM y sensores de RPM de cada rueda, componentes mecánicos como: discos de freno que son movidos por un motor de combustión interna con la ayuda de elementos de transmisión de potencia principalmente ruedas dentadas y cadenas. Adaptando dichos componentes a una estructura previamente diseñada con materiales que resisten el peso de cada conjunto de disco y que sobre todo soportan las velocidades a las que giran los mismos. Para mejor entendimiento y monitoreo del sistema, el banco consta de manómetros que permiten verificar la presión con y sin ABS,
X
x

de un puerto OBD2 que permite la comunicación del EBCM con un escáner, y un sistema electrónico de medición de RPM a la que giran los discos en el momento de la simulación y a qué velocidad se detienen las mismas El banco de pruebas cumplió con todos los
parámetros técnicos y de funcionamiento
para que el mismo sea de gran utilidad a
estudiantes y personas en general que
requieran comprender de mejor manera la
disposición, partes y funcionamiento del
sistema ABS.
PALABRAS CLAVES:
ABS (Anti-lock Brake System) Sistema de
frenos con antibloqueo, EBCM (Electronic
Brake Control Module) Módulo de Control
Electrónico de frenos, sensores,
manómetros, DLC (Data Link Conector).
ABSTRACT:
The ABS system was implemented, to the disc and drum brake bench in the university's automotive engineering workshop, to publicize the components and the operation of this active safety system so common in vehicles that are marketed nowadays, in order to differentiate the braking of a vehicle that has ABS and another that does not have as a reference the pressures and the braking distance to which the brake discs are subjected. For this, it was necessary to acquire all the electronic elements that make up a conventional ABS system such as: EBCM and RPM sensors of each wheel, mechanical components such as: brake discs that are moved by an internal combustion engine with the aid of elements Power transmission mainly cogwheels and chains. Adapting these components to a structure previously designed with materials that resist the weight of each disc assembly and that mainly support the speeds to which they turn. For a better understanding and monitoring of
the system, the bank consists of pressure
gauges that can check the pressure with and
without ABS, an OBD2 port that allows the
EBCM to communicate with a scanner, and
an electronic RPM measurement system to
which the Disks at the time of the simulation
and at what speed the same. The test bench
complied with all the technical and operating

parameters so that it is so useful to students
and people in general who need to better
understand the arrangement, parts and
operation of the ABS system.
KEYWORDS
ABS (Anti-Lock Brake System), EBCM
(Electronic Brake Control Module), sensors,
gauges, DLC (Data Link Conector).
Se autoriza la publicación de este Proyecto de Titulación en el Repositorio
Digital de la Institución.
f:__________________________________________
Meléndez Viscarra Gustavo Gabriel
1724399280

DECLARACIÓN Y AUTORIZACIÓN
Yo, MELÉNDEZ VISCARRA GUSTAVO GABRIEL, CI 1724399280 autor del
proyecto titulado: Implementación de un sistema ABS en el simulador de
frenos por disco-tambor del taller de ingeniería automotriz de la
universidad tecnológica equinoccial previo a la obtención del título de
INGENIERO AUTOMOTRIZ en la Universidad Tecnológica Equinoccial.
1. Declaro tener pleno conocimiento de la obligación que tienen las
Instituciones de Educación Superior, de conformidad con el Artículo
144 de la Ley Orgánica de Educación Superior, de entregar a la
SENESCYT en formato digital una copia del referido trabajo de
graduación para que sea integrado al Sistema Nacional de información
de la Educación Superior del Ecuador para su difusión pública
respetando los derechos de autor.
2. Autorizo a la BIBLIOTECA de la Universidad Tecnológica Equinoccial
a tener una copia del referido trabajo de graduación con el propósito de
generar un Repositorio que democratice la información, respetando las
políticas de propiedad intelectual vigentes.
Quito, 04 abril 2017
F:____________________ ______________________
MELÉNDEZ VISCARRA GUSTAVO GABRIEL
1724399280

DECLARACIÓN
Yo MELÉNDEZ VISCARRA GUSTAVO GABRIEL, declaro que el trabajo
aquí descrito es de mi autoría; que no ha sido previamente presentado para
ningún grado o calificación profesional; y, que he consultado las referencias
bibliográficas que se incluyen en este documento.
La Universidad Tecnológica Equinoccial puede hacer uso de los derechos
correspondientes a este trabajo, según lo establecido por la Ley de Propiedad
Intelectual, por su Reglamento y por la normativa institucional vigente.
_________________________ MELENDEZ VISCARRA GUSTAVO GABRIEL
1724399280

CERTIFICACIÓN
Certifico que el presente trabajo que lleva por título “implementación de un
sistema ABS en el simulador de frenos por disco-tambor del taller de
ingeniería automotriz de la Universidad Tecnológica Equinoccial”, que, para
aspirar al título de INGENIERO AUTOMOTRIZ fue desarrollado por
GUSTAVO GABRIEL MELÉNDEZ VISCARRA, bajo mi dirección y
supervisión, en la Facultad de Ciencias de la Ingeniería e Industrias; y
cumple con las condiciones requeridas por el reglamento de Trabajos de
Titulación artículos 19, 27 y 28.
Ing. Cueva Eduardo
DIRECTOR DEL TRABAJO
C.I. 1722636220

i
ÍNDICE DE CONTENIDOS
PÁGINA
RESUMEN ..................................................................................................... 1
ABSTRACT ................................................................................................... 2
1. INTRODUCCIÓN ....................................................................................... 3
2. METODOLOGÍA ...................................................................................... 13
3. RESULTADOS Y DISCUSIÓN ................................................................ 15
3.1. ELEMENTOS MECÁNICOS .............................................................. 16
3.1.1. MANGUETA DE DIRECCIÓN .................................................... 16 3.1.2. DISCOS DE FRENO Y MORDAZAS .......................................... 16
3.1.3. PUNTAS DE EJE ........................................................................ 17 3.1.4. SERVOFRENO Y CILINDRO PRINCIPAL ................................. 17 3.1.5. CAÑERÍAS .................................................................................. 18
3.2. SISTEMA DE PROPULSIÓN DE LOS DISCOS ................................ 18 3.2.1. MOTOR DE COMBUSTIÓN INTERNA ....................................... 20
3.2.1.1. Depósito de combustible ...................................................... 22 3.3. TRANSMISIÓN DE POTENCIA ........................................................ 23
3.3.1. CÁLCULO PARA LA LONGITUD DE CADENA ......................... 25
3.4. DIFERENCIAL Y EJES ..................................................................... 27
3.4.1. EJES. .......................................................................................... 27 3.4.1.1 Cálculos del Eje principal. ..................................................... 27 3.4.1.2 Cálculos del eje posterior. ..................................................... 37
3.5. COMPONENTES DEL SISTEMA ABS.............................................. 43 3.5.1. MÒDULO DE CONTROL ELECTRONICO DE FRENOS ........... 43 3.5.2. SENSORES DE VELOCIDAD DE RUEDA ................................. 44
3.6. MONTAJE DE LOS COMPONENTES .............................................. 46 3.7. ALIMENTACIÓN Y PROTECCIÓN DEL SISTEMA ........................... 51
3.7.1. INDICADORES LUMINOSOS .................................................... 53 3.8. CONEXIÓN DEL EBCM .................................................................... 53 3.9. ELEMENTOS DE MONITOREO DE FUNCIONAMIENTO ................ 57
3.9.1. MANÓMETROS DE PRESIÓN ................................................... 58 3.9.2. MEDICIÓN DE VELOCIDAD DE RUEDAS ................................ 58
3.9.2.1. Sensores .............................................................................. 58 3.9.2.2. Pantalla ................................................................................ 59
3.9.2.3. Microcontrolador ................................................................... 59 3.9.2.4. Conector DLC (Data link Conector) ...................................... 61 3.9.2.5. Terminales de medición para sensores ................................ 62
3.10. PRUEBAS DE FUNCIONAMIENTO ............................................... 62 3.10.1. FUNCIONAMIENTO GENERAL ............................................... 62 3.10.2. FUNCIONAMIENTO DE COMPONENTES DE MEDICIÓN ..... 63

ii
3.10.3. FUNCIONAMIENTO DEL SISTEMA ABS ................................ 63
4. CONCLUSIONES Y RECOMENDACIONES ........................................... 66
4.1. CONCLUSIONES .............................................................................. 66 4.2. RECOMENDACIONES ..................................................................... 67
5. BIBLIOGRAFÍA ....................................................................................... 68
6. ANEXOS .................................................................................................. 70

iii
ÍNDICE DE TABLAS
PÁGINA
Tabla 1. Componentes del simulador. ......................................................... 15
Tabla 2. Valoración de sistemas de propulsión para discos. ....................... 19
Tabla 3. Datos técnicos del motor de combustión interna ........................... 21
Tabla 4. Sistemas de transmisión de potencia ............................................ 23
Tabla 5. Fuerzas y reacciones que se dan en el eje principal ..................... 32
Tabla 6. Reacciones y fuerzas que actúan en el eje posterior .................... 40
Tabla 7. Comparación entre la velocidad lineal y angular de discos. .......... 46
Tabla 8. Materiales utilizados para el montaje de los elementos................. 47
Tabla 9. Designación de testigos LED. ........................................................ 53
Tabla 10. Numeración de cables y su utilización en el banco ..................... 53
Tabla 11. Designación de pines y funciones. .............................................. 56
Tabla 12. Entrehierro y resistencia de los sensores .................................... 64
Tabla 13. Resultados de la simulación del sistema ABS. ............................ 64

iv
ÍNDICE DE FIGURAS
PÁGINA
Figura 1. Disposición de los componentes del sistema ABS. ....................... 5
Figura 2. Señales tomadas en cuenta por el EBCM. .................................... 6
Figura 3. Partes de la unidad de control hidráulico. ...................................... 7
Figura 4. Ubicación de la rueda fónica. ......................................................... 8
Figura 5. Frenado normal sin ABS. ............................................................... 8
Figura 6. Mangueta, buje y perforación para sensor de RPM. ................... 16
Figura 7. Disco de freno y mordaza. ........................................................... 17
Figura 8. Punta de eje con rueda fónica. .................................................... 17
Figura 9. Servofreno con bomba de freno. .................................................. 18
Figura 10. Cañerías de freno. ..................................................................... 18
Figura 11. Base de motor. ........................................................................... 21
Figura 12. Manubrio de embrague y cable de acelerador. .......................... 22
Figura 13. Ubicación del depósito de combustible. ..................................... 22
Figura 14. Conexión de manguera a carburador de motor ......................... 23
Figura 15. Piñón de transmisión de moto. ................................................... 24
Figura 16. Sistema de transmisión. ............................................................. 24
Figura 17. Transmisión de los discos delanteros y posteriores. .................. 25
Figura 18. Eje principal. ............................................................................. 27
Figura 19. Diagrama de fuerzas en el eje principal. .................................... 28
Figura 20. Inclinación de cadena del eje principal. ...................................... 28
Figura 21. Grado de inclinación y componentes de cadena. ...................... 30
Figura 22. Grafica de esfuerzo cortante en X del eje principal. ................... 33
Figura 23. Grafica de esfuerzo cortante en el eje Y. ................................... 33
Figura 24. Grafica de momento flector en plano xz ..................................... 34
Figura 25. Grafica de momento flector en el plano yz ................................. 34
Figura 26. Diagrama de momentos en todos los planos. ............................ 35
Figura 27. Disposición del eje posterior ...................................................... 37
Figura 28. Diagrama de fuerzas, reacciones y momentos en eje posterior. 37
Figura 29. Distancias de apoyos, y piñón eje posterior ............................... 38
Figura 30. Grafica de esfuerzo cortante en eje x ........................................ 40
Figura 31. Grafica de esfuerzo cortante en eje y ........................................ 40
Figura 32. Grafica de momento flector plano xz, eje posterior. ................... 41
Figura 33. Grafica momento flector plano yz eje posterior .......................... 41
Figura 34. Partes principales del EBCM. .................................................... 44
Figura 35. Sensor de velocidad delantero ................................................... 46
Figura 36. Sustitución de los elementos del banco de frenos originales. .... 47
Figura 37. Diferencial unido a chumaceras y fijado al tubo rectangular. ..... 48
Figura 38. Corte de tubo rectangular para soportes. ................................... 48
Figura 39. Soldado de tubo rectangular para soportes. .............................. 48

v
Figura 40. Soportes construidos, con perforaciones en ángulos................. 49
Figura 41. Refuerzos de soportes de discos. .............................................. 49
Figura 42. Soportes de discos posteriores. ................................................. 50
Figura 43. Simulador con 4 discos y transmisión de potencia..................... 50
Figura 44. Interruptor de encendido general. .............................................. 51
Figura 45. Interruptor de encendido de EBCM ............................................ 51
Figura 46. Interruptor de encendido de MCI ............................................... 52
Figura 47. Interruptor de apagado MCI ....................................................... 52
Figura 48. Esquema eléctrico del banco. .................................................... 52
Figura 49. Señales de entrada que necesita el EBCM. ............................... 54
Figura 50. Conexión de sensores de velocidad de ruedas. ........................ 55
Figura 51. Conector principal del EBCM. .................................................... 55
Figura 52. Caja de fusibles señales positivas. ............................................ 57
Figura 53. Conexiones negativas del EBCM. .............................................. 57
Figura 54. Manómetros con glicerina. ......................................................... 58
Figura 55. Sensor infrarrojo o encoder ........................................................ 58
Figura 56. Pantalla LCD 16x2 ..................................................................... 59
Figura 57. Pines de microcontrolador 16F877A .......................................... 59
Figura 58. Señales de entrada y salida del microcontrolador. .................... 60
Figura 59. Diagrama de condiciones funcionamiento de medidor de rpm. . 60
Figura 60. Placa electrónica ........................................................................ 61
Figura 61. Señales de conector de comunicación con escáner. ................. 61
Figura 62. Conectores hembra para monitoreo de sensores. ..................... 62

vi
ÍNDICE DE ANEXOS
PÁGINA
Anexo 1. Guía de usuario del simulador ..................................................... 70
Anexo 2. Lista de códigos de falla ............................................................... 72
Anexo 3. Programación del PIC 16F877A .................................................. 74
Anexo 4. Constante K para cálculo de longitud de cadena ......................... 75
Anexo 5. Esquema de estructura del simulador .......................................... 76
Anexo 6. Esquema 3D de estructura del simulador .................................... 77
Anexo 7. Propiedades del acero. ................................................................ 78

1
RESUMEN
Se implementó el sistema ABS, al banco de frenos por disco-tambor existente
en el taller de ingeniería automotriz de la universidad, para dar a conocer los
componentes y el funcionamiento de este sistema de seguridad activa muy
común en los vehículos que se comercializan hoy en día, para que además
se pueda diferenciar la frenada de un vehículo que posee ABS y otro que no
posea tomando como referencia las presiones y la distancia de frenado a las
que son sometidos los discos de freno.
Para lo anterior fue necesario adquirir todos los elementos electrónicos que
componen un sistema ABS convencional como son: EBCM y sensores de rpm
de cada rueda, componentes mecánicos como: discos de freno que son
movidos por un motor de combustión interna con la ayuda de elementos de
transmisión de potencia principalmente ruedas dentadas y cadenas.
Adaptando dichos componentes a una estructura previamente diseñada con
materiales que resisten el peso de cada conjunto de disco y que sobre todo
soportan las velocidades a las que giran los mismos.
Para mejor entendimiento y monitoreo del sistema, el banco consta de
manómetros que permiten verificar la presión del sistema, de un puerto DLC
que permite la comunicación del EBCM con un escáner, y un sistema
electrónico de medición de rpm a las que giran los discos en el momento de
la simulación y a qué velocidad se detienen las mismas
El banco de pruebas cumplió con todos los parámetros técnicos y de
funcionamiento para que el mismo sea de gran utilidad a estudiantes y
personas en general que requieran comprender de mejor manera la
disposición, partes y funcionamiento del sistema ABS.
PALABRAS CLAVES: ABS (Anti-lock Brake System) Sistema de frenos con
antibloqueo, EBCM (Electronic Brake Control Module) Módulo de control
electrónico de frenos, sensores, manómetros, DLC (Data Link Conector).

2
ABSTRACT
The ABS system was implemented, to the disc and drum brake bench in the
university's automotive engineering workshop, to publicize the components
and the operation of this active safety system so common in vehicles that are
marketed nowadays, in order to differentiate the braking of a vehicle that has
ABS and another that does not have as a reference the pressures and the
braking distance to which the brake discs are subjected.
For this, it was necessary to acquire all the electronic elements that make up
a conventional ABS system such as: EBCM and rpm sensors of each wheel,
mechanical components such as: brake discs that are moved by an internal
combustion engine with the aid of elements Power transmission mainly
cogwheels and chains.
Adapting these components to a structure previously designed with materials
that resist the weight of each disc assembly and that mainly support the speeds
to which they turn.
For a better understanding and monitoring of the system, the bank consists of
pressure gauges that can check the pressure with and without ABS, an OBD2
port that allows the EBCM to communicate with a scanner, and an electronic
rpm measurement system to which the disks at the time of the simulation and
at what speed the same. The test bench complied with all the technical and
operating parameters so that it is so useful to students and people in general
who need to better understand the arrangement, parts and operation of the
ABS system.
KEYWORDS: ABS (Anti-Lock Brake System), EBCM (Electronic Brake
Control Module), sensors, gauges, DLC (Data Link Conector).

1. INTRODUCCIÓN

3
1. INTRODUCCIÓN
Los avances desarrollados en el sector automotriz han ayudado a desarrollar
nuevas tecnologías para la construcción de vehículos, todo gracias a la
electrónica e informática logrando así tener sistemas interconectados que
dependan el uno del otro, no es la excepción el gran desarrollo que se ha
tenido en sistemas de seguridad, tal es el caso de un sistema que se ha hecho
imprescindible en los nuevos vehículos como lo es el sistema de frenos con
antibloqueo, dicho sistema es desconocido por la mayoría de personas y
sobre todo la importancia que tiene el mismo en la conducción del vehículo
Gracias a la construcción del simulador se pretende mejorar el aprendizaje de
los estudiantes de ingeniería automotriz sobre sistemas de seguridad activa,
atendiendo a la demanda que el parque automotor presenta actualmente, ya
que el guiarse en animaciones o teoría no basta para tener una noción clara
sobre cómo opera el sistema.
Además servirá como material de apoyo para que docentes de materias como:
mecanismos del vehículo, sistemas de seguridad del automóvil, programación
de mantenimiento y autotrónica realicen sus prácticas en el simulador.
La norma ecuatoriana INEN 034 del año 2014 exige entre otras cosas que los
automóviles nuevos vengan equipados con sistemas de frenos con
antibloqueo, debido a que este sistema es de gran ayuda para reducir los
índices de accidentabilidad. Aunque el sistema ABS sea un sistema necesario
en el automóvil existen varios sistemas que complementan la seguridad de un
vehículo tal es el caso del sistema EBD (Electronic Brake Distribution) o
reparto electrónico de frenada, sistema BAS (Brake Assist System) o
asistencia al frenado de emergencia, controles de tracción o TCS (Traction
Control System) por sus siglas en inglés de Sistema de Control de Tracción,
y finalmente el sistema ESP (Electronic Stability Program) o programa
electrónico de estabilidad que se ayuda de todos los sistemas anteriormente
nombrados para su funcionamiento, dichos sistemas son incluidos en
vehículos de medía a alta gama porque aumentan la seguridad y confort del
vehículo.
En el mercado existen varias marcas que han realizado sistemas de frenos
ABS didácticos para entrenamiento de personal ya sea estudiantes o
trabajadores, de la misma forma en varias universidades nacionales e
internacionales han realizado bancos simuladores del sistema que varían su
diseño, pero su fin es el mismo. Tal es el caso en la Escuela Superior
Politécnica de Chimborazo los estudiantes de Ingeniería Automotriz Milton
Encalada y Andrés Núñez implementaron un tablero de frenos ABS para el
laboratorio de la escuela de ingeniería automotriz, el mismo tiene varias cosas
de un sistema ABS normal pero es realizado de manera más didáctica,
permite a los estudiantes medir señales de los sensores, simular el frenado
ya que dispone de frenos reales y posee manómetros para verificar la presión

4
a la que trabaja el sistema. En la Universidad Internacional del Ecuador el
estudiante Marcelo Alvarado implementó un simulador de un sistema ABS
más simple que consta solo de dos discos y un tablero donde se pueden
realizar mediciones.
En el ámbito internacional existen varios simuladores del sistema ABS que
son completos y permiten una simulación integral, este es el caso del
simulador de la marca Injectiontools que permite una simulación real del
sistema ya que posee cuatro discos de freno con sus respectivos neumáticos
y un sistema de inversores que permiten bloquear cualquier rueda. Posee
además manómetros conectados a las cuatro líneas de presión y consta de
todas las partes de un sistema básico de frenos ABS.
La empresa mexicana Edutelsa S.A fabrica simuladores de varios sistemas
automotrices, y no es la excepción el sistema ABS, que posee cuatro sensores
de velocidad que captan la señal de una rueda fónica pero no se encuentran
conectados a neumáticos, el funcionamiento se simula con potenciómetros
que hacen variar la velocidad de motores. Además, posee cuatro manómetros
para medir presión de cada línea.
La empresa española AlecoGroup construye simuladores de sistemas ABS,
EBD y ESP siendo este más complejo que permite conectarse a la
computadora mediante un programa, y mediante este verificar el
funcionamiento, medir parámetros como velocidad, presiones, voltajes y
resistencias de los componentes.
En el taller de ingeniería automotriz de la Universidad Tecnológica Equinoccial
existe un banco simulador de un sistema de frenos de disco y tambor
implementado por el señor Ernesto Aman, el mismo posee los componentes
básicos de un sistema de frenos, entre los cuales consta de discos, tambores,
servofreno un motor eléctrico para simular el frenado, etc. Pero no consta de
los componentes de un sistema ABS; es por eso que surgió la necesidad de
modificar este simulador para implementar a este los componentes del
sistema antes nombrado, para que sea una herramienta de aprendizaje más
completa y se pueda apreciar de mejor manera como actúa el sistema de
frenos en condiciones extremas
El sistema ABS es una variación del sistema de frenos convencional y su
principal función es evitar que las ruedas del vehículo se bloqueen al momento
de una frenada brusca, brindando así al conductor, un mayor control de las
ruedas directrices y una menor distancia de frenado, reduciendo así riegos de
accidentes. Para este fin el sistema utiliza varios componentes fusionando
elementos electrónicos como hidráulicos cuyas características serán descritas
más adelante.
La mayoría de sistemas funcionan con la ayuda de sensores ubicados en las
ruedas, estos controlan la velocidad de giro de la misma. En base a estos
datos la unidad de control electrónico calcula la velocidad media a la que están
girando todas las ruedas que corresponde a la velocidad a la que está yendo
vehículo y realiza una comparación de la velocidad de cada rueda con la

5
velocidad media y con esto el módulo de control puede saber que rueda tiende
a bloquearse. Si se da el caso el sistema reduce la presión en la rueda que se
bloquea hasta alcanzar un valor menor al límite de bloqueo. Cuando la rueda
gira libremente la presión vuelve a aumentar a la presión de frenado máxima;
repitiéndose este proceso varias veces por segundo hasta que el conductor
retire el pie del pedal del freno, dicho proceso es imperceptible por el
conductor. (Muñoz, 2007)
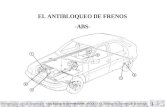
Para cumplir con las exigencias, el sistema ABS debe funcionar de manera
eficiente, rápida y exacta; específicamente en décimas de segundo, para lo
mismo el sistema ABS consta de los siguientes elementos, cuya ubicación
esta detallada en la figura 1:
Figura 1. Disposición de los componentes del sistema ABS.
(Sandro, 2010)
La unidad de control electrónica de frenos (EBCM) es la encargada de recibir,
filtrar y amplificar las señales de los sensores ubicados en las ruedas, para
con esto medir las velocidades y con base a estos datos calcular el
deslizamiento que están presentando las ruedas, para posteriormente
controlar la unidad de control hidráulico, suministrando la presión adecuada a
los cilindros de los frenos manejando así óptimamente la velocidad de las
ruedas. (Oliveros, 2012).
Los parámetros principales que toma en cuenta el EBCM para la operación
del sistema son:

6
Velocidad de referencia.
Deslizamiento de las diferentes ruedas: la unidad electrónica monitorea
constantemente que el deslizamiento de cada rueda sea el mismo que
todas, cuando cualquiera de ella tiene diferente deslizamiento significa que
esa rueda se está bloqueando.
Aceleraciones y deceleraciones de las ruedas.
Reconocimiento de la adherencia longitudinal neumático-suelo: La
unidad considera dos condiciones de adherencia: baja (de hielo a nieve) y
alta (de suelo mojado a suelo seco). (Muñoz, 2007)
Reconocimiento de las condiciones de rodaje de las llantas:
Viraje: al tomar una curva, la unidad observa las diferencias de
velocidades de las ruedas posteriores ya que la rueda exterior gira más
rápido que la rueda interior.
Asimetría: es la comparación de los deslizamientos de las ruedas de un
mismo lado, con los deslizamientos de las ruedas del lado contrario.
(Muñoz, 2007).
Todas las señales de entrada que el EBCM procesa y que posteriormente son
utilizadas para controlar las electroválvulas así como su constitución interna
se especifican en la figura 2.
Figura 2. Señales tomadas en cuenta por el EBCM.
(Muñoz, 2007)

7
La Unidad de Control Hidráulico es el dispositivo constituido por
microcontroladores y varios elementos electrónicos encargado de aplicar o
dejar de aplicar la presión que va desde el cilindro maestro hacia los cilindros
de freno, de acuerdo a las señales que envían los sensores ubicados en las
ruedas, controlando así las velocidades de las ruedas, en algunos modelos
de vehículos el modulo electrónico y el hidráulico se encuentran separados
pero en la actualidad para ahorrar espacio y mejor eficiencia el módulo de
control electrónico e hidráulico se encuentran unidos en un solo cuerpo.
El módulo de control hidráulico está compuesto de las siguientes partes
puntualizadas con mayor precisión en la figura 3.
Figura 3. Partes de la unidad de control hidráulico.
(Gomez, 2000)
Electroválvulas: están formadas por un solenoide y un inducido móvil que
realiza la apertura y cierre, así mismo un muelle es el encargado de volver
a la posición de reposo a las válvulas. La unidad de control hidráulica esta
provista de dos electroválvulas de admisión y dos de escape cerradas.
Conjunto motor-bomba: está formado por un motor eléctrico y una
bomba hidráulica, controlados por el EBCM. Su función principal es
rechazar el líquido de frenos y aplicar mayor presión cuando sea necesario
en el momento de la fase de frenada. (Muñoz, 2007).
Los sensores de rpm ya sean de las ruedas delanteras o posteriores consisten
en un imán permanente y una bobina. El sensor de velocidad de las ruedas
delanteras está fijado al muñón de la dirección y el de las ruedas posteriores
por lo general va colocado en el porta eje posterior. (Sandro, 2010)
La rueda fónica son anillos dentados que se encuentran fijados a las
campanas de impulsión tanto en las ruedas delanteras como en las
posteriores, como se puede ver en la figura 4, (en algunos casos en la parte

8
posterior se encuentra fijada en el diferencial) en otros casos se encuentra
fijada en la manzana del disco, para de esta forma girar solidariamente con
ellos. (Sandro, 2010)
Figura 4. Ubicación de la rueda fónica.
(Sandro, 2010)
El sensor funciona bajo el principio de inducción, al moverse la rueda fónica
conjuntamente con el eje, frente al sensor, se alternan los dientes, esta
variación del campo magnético que atraviesa la bobina genera una tensión
alterna sinusoidal esta señal es captada por la ECU la misma que cuenta los
dientes que han pasado por el sensor permitiéndole así determinar la
velocidad de la rueda. En una situación extrema el EBCM detectará que el
número de dientes que pasan por el sensor de una rueda son inferiores que
las demás lo que indicará que esta rueda se está bloqueando y por
consiguiente debe aliviar la presión de esta.
El funcionamiento del ABS consta de varias etapas cuando actúa el modulo
hidráulico, estas etapas y condiciones son:
Durante una frenada normal el EBCM no actúa en la regulación de la
presión, el líquido de frenos es enviado del reservorio (9) hacia las
mordazas con la ayuda del cilindro principal, la presión pasa por la válvula
de entrada del EBCM (1), que se encuentra abierta, para luego ir
directamente al disco o tambor como se detalla en la figura 5 En esta
condición la válvula de salida se encuentra cerrada (2).
Figura 5. Frenado normal sin ABS.
(Mullo & Pumasunta, 2008)
Si el módulo de control electrónico detecta el bloqueo de alguna llanta o
una frenada de emergencia, es ahí donde comienza la fase de liberación
de presión donde se requiere que la presión existente en la mordaza baje,

9
para esto la electroválvula de entrada se cierra (1), y la electroválvula de
salida se abre (2) haciendo que el líquido retorne al reservorio, con la
ayuda de la bomba.
Para mantener la presión en la mordaza luego de la etapa de liberación,
comienza a etapa de retención de presión en donde tanto la válvula de
entrada (1) como la de salida se cierran (2) y el motor de la bomba se
encuentra en reposo (3).
Todas las fases anteriormente nombradas se realizan varias veces por
segundo para de esta forma tratar de igualar la velocidad del vehículo con la
velocidad del neumático.
Para la elección de un motor adecuado para mover el peso que generan los
discos se utilizaron fórmulas generales de fuerza, potencia y perímetro dichas
formulas se especifican en la ecuación 1, 2 y 3 respectivamente:
𝐹 = 𝑚. 𝑔 [1]
Dónde:
F= la fuerza o peso que tienen los discos.
m= la masa de los discos expresada en kilogramos
g= la gravedad cuyo valor es de 9.8 m/ s2
Para determinar la distancia que recorre el disco en una vuelta se utilizó la
ecuación 2
𝑃𝑑𝑖𝑠𝑐𝑜 = 2𝜋𝑅 [2]
Dónde:
Pdisco= es el perímetro del disco
R= el radio del disco que es de 0.118 m
Para la potencia se utilizó la formula general de la potencia descrita en la
ecuación 3
𝑃 =𝑊
𝑡 [3]
Como se describe más adelante para el movimiento de los cuatro discos fue
necesaria la utilización de tres ejes de distinto tamaño, que son sometidos a
esfuerzos y al frenar presentan reacciones. Estos parámetros se calculan
mediante las siguientes formulas:

10
Para el cálculo de torques se utilizó una variante de la fórmula de la potencia,
que relaciona la fuerza y la velocidad angular, la misma que se describe en la
ecuación 4.
𝑃 = 𝑇 𝑥 𝑛 [4]
Dónde:
P= potencia generada por el motor
T= torque
n=velocidad angular
En la ecuación 5 se describe una variante de la fórmula del torque, que fue
necesaria para calcular las fuerzas que actúan en el eje dicha ecuación se
describe a continuación:
𝐹 =𝑇
𝑟 [5]
Dónde:
F= fuerza
T= torque
r = radio de los piñones
En lo referente a los análisis tanto estático como dinámico se tomó en cuenta
la teoría de la mínima distorsión puesto que se utilizó materiales dúctiles, en
esta teoría se realiza el cálculo del factor de seguridad para el análisis estático
con la siguiente ecuación 6. (Shigley, Joseph, & Mischke, 1992)
𝑑 = 32.𝑛
𝜋.𝑆𝑦[𝑀2 +
3𝑇2
4]
1/2
1/3
[6]
Dónde:
d= diámetro del eje
n= factor de seguridad
Sy= límite de fluencia del acero, anexo 7.
T= torsión
M= momento máximo.
En el análisis dinámico se utilizó la ecuación 7 descrita a continuación
(Shigley, Joseph, & Mischke, 1992),

11
𝑑 = 48𝑛
𝜋[(
𝑇
𝑆𝑦)
2
+ (𝑀
𝑆𝑒)
2
]
1/2
1/3
[7]
Dónde:
d= diámetro del eje
n= factor de seguridad
Sy= límite de fluencia del acero, anexo 7.
T= torsión
M= momento máximo.
Se= límite de resistencia a la fatiga corregida.
𝑆𝑒 es un factor que se encuentra mediante la siguiente formula. (Shigley,
Joseph, & Mischke, 1992):
𝑆𝑒 = 𝐾𝑎 𝑥 𝑘𝑏 𝑥 𝑥 𝐾𝑐 𝑥 𝐾𝑑 𝑥 𝐾𝑒 𝑥 𝐾𝑓 𝑆𝑒′ [8]
Dónde:
Ka= factor superficie.
Kb= factor tamaño
Kc= factor carga
kd = factor de temperatura
ke = factor de confiabilidad
kf = factor de efectos dispersos
Se’= límite de resistencia a la fatiga
Para la longitud de la cadena de un piñón existe una ecuación que permite
seleccionar con mayor exactitud el número de eslabones para que no existan
desperdicios. Esta fórmula es descrita en la ecuación 9 (INTERMEC, 2013) .
𝐿 = 2 𝐶 + 𝑆
2+
𝐾
𝑆 [9]
Dónde:
C: es la división de la distancia entre los centros de los ejes [pulgadas] por el
paso de la cadena
S: es la suma del número de dientes del piñón pequeño con los del grande.
D: es la resta del número de dientes del piñón pequeño del número de dientes
del piñón grande.
K: según sea la cantidad de la variable D permitirá guiarse en la tabla y
encontrar el valor representado por la letra K. La tabla se encuentra en el
anexo 4.

12
Para saber con mayor precisión a cuantas rpm giran los discos basándose en
una velocidad lineal fue necesario la aplicación de la formula general de la
velocidad angular, dicha fórmula se describe en la ecuación 10.
𝑊 =𝑉
𝑅 [10]
Dónde:
V= velocidad lineal que viene dada en m/s
R= radio de los discos

2. METODOLOGÍA

13
2. METODOLOGÍA
Se investigó si existen tesis, bancos o simuladores en el taller de la carrera
relacionados al tema para poder modificar e implementar el sistema ABS. Y
se decidió modificar el Banco simulador de un sistema por disco-tambor
perteneciente al Sr. Ernesto Aman.
Se investigó de manera general como y cuando actúa el sistema ABS, y luego
se investigó a fondo los elementos que componen el sistema, sus
características y funcionamiento.
Una vez seleccionado el banco y seleccionar los elementos que se van a
implementar se procedió a modificar el Simulador de un sistema por disco-
tambor mediante los siguientes pasos.
Se adquirieron los componentes de un sistema ABS convencional estos
fueron: conjunto de discos con sus respectivas manguetas bujes y puntas de
eje, módulo de control electrónico e hidráulico, sensores de velocidad para las
cuatro ruedas.
Se desmontaron todos los componentes del simulador por disco-tambor que
estaban fijados en la estructura como son discos de freno, tambores, cañerías,
los soportes que contienen a estos elementos manómetros de presión y motor
eléctrico.
Una vez retirados todos los elementos, se procedió a instalar el diferencial en
donde se alojarían los discos delanteros, para eso se tomaron medidas para
que el diferencial quede alineado con los discos y en una correcta posición
para poder instalar el sistema de transmisión de potencia.
Se midió la longitud que existe del diferencial hacia donde se van a colocar
los discos, la distancia que hay entre las puntas de eje y el buje, la tolerancia
que existe entre el eje y las puntas de eje, y se diseñaron los ejes que dan
movimiento a los discos delantero.
Una vez instalado el diferencial y los ejes, se procedió a montar los discos
delanteros en sus soportes y alinearlos con los ejes.
Luego de instalar los discos delanteros, se instalaron los discos posteriores
en los soportes fijados a la estructura.
Instalados los 4 discos se procedió a construir la estructura que soportaría al
motor de combustión interna (MCI), para eso se analizó el tamaño del motor
y si la estructura soportaría el peso del mismo. Además, se tomaron las
medidas para que el motor quede correctamente alineado con el diferencial
instalado en los discos delanteros. Luego se instaló el motor en la estructura
construido y se fijó mediante pernos.
Fue necesario el análisis para escoger el sistema de transmisión de potencia,
y se eligió el sistema piñón-cadena una vez seleccionado el sistema se
procedió a colocar los elementos tanto en el diferencial como en el eje de
transmisión hacia los discos posteriores
Para la transmisión de movimiento del motor al diferencial se utilizó el sistema
piñón-cadena, para eso fue necesario la utilización de dos piñones el de la

14
transmisión del motor de moto que contiene 15 dientes y otro de 8 dientes, los
mismos que son movidos por una cadena simple.
Para la transmisión de movimiento hacia las llantas posteriores se utilizó dos
piñones de 21 dientes de las mismas características que los utilizados en los
discos delanteros, uno se fijó al eje delantero más extenso y el otro al eje de
las llantas posteriores.
Una vez adaptada toda la parte mecánica del sistema se procedió a instalar
el modulo electrónico e hidráulico del ABS en la estructura para luego extender
las cañerías desde el modulo hacia los discos y desde el cilindro principal
hacía el modulo.
Mediante la utilización de una fusiblera y un bornera se intalaron las señales
de alimentación positivas y negativas del modulo de control electronico,
ademas se conectaron las señales que utiliza el EBCM para su
funcionamiento. Y se sacaron señales hacia el puerto DLC instalado en el
tablero. Del mismo ciruito de alimentacion del EBCM se realizaron las
conexiones para encendido y apagado del motor de combustión.
Se instaló un sistema electronico de medición de revoluciones por minuto que
consta de cuatro sensores ubicados en cada rueda y una pantalla ubicada en
el tablero de mando de la estructura. Tambien fue necesario la instalación de
dos manometros de glicerina que se encuentran alojados en el tablero.
Una vez instalados sistemas mecanicos, sistema electronico, y sistemas de
medición y monitoreo se procedio a realizar pruebas de funcionamiento del
simulador

3. RESULTADOS Y DISCUSIÓN

15
3. RESULTADOS Y DISCUSIÓN
Al contar con una estructura previamente diseñada y construida para el
sistema de frenos, no fue necesario diseñar y construir otra para el sistema
de frenos ABS, pues la estructura construida soporta los esfuerzos, pesos, y
cargas a los que son sometidos los elementos, es por esta razón que solo se
retiraron los elementos existentes y se adaptaron los componentes del
sistema ABS. Cabe recalcar que la estructura contaba con un pedal de freno,
y un motor de vacío que sirve para dar un vacío al servofreno.
Para la adquisición de los elementos del sistema se analizó que automóvil
liviano disponía de frenos ABS dichos elementos se pueden verificar en la
tabla 1.
Tabla 1. Componentes del simulador.
COMPONENTE PROCEDENCIA
Manguetas de dirección y bujes Chevrolet Aveo Emotion
Puntas de eje Chevrolet Aveo Emotion
Módulo de control electrónico Chevrolet Aveo Emotion
Sensores de velocidad Chevrolet Aveo Emotion
Diferencial Chevrolet Corsa Evolution
Motor de combustión interna 200cc Motocicleta Ranger
Como se puede verificar en la tabla 1 los elementos del simulador fueron
elegidos de un vehículo liviano que tenga un sistema ABS no muy complejo y
sobre todo los elementos no sean costosos. Por esa razón se eligieron os
elementos del Chevrolet Aveo Emotion debido a que es un automóvil muy
comercial y por esta razón las partes del mismo se pueden encontrar
fácilmente y a un precio razonable.
Los componentes mecánicos del sistema fueron adquiridos de segunda mano
de vehículos colisionados principalmente, verificando el buen estado y que
funcionen correctamente. Para la transmisión de movimiento se adquirieron
los piñones, cadenas y chumaceras en locales especializados en lo referente
a transmisión de potencia.
Para la adaptación de los componentes del sistema ABS, se eligió un acero
que soporte las cargas de los elementos que componen el banco y para
seguridad se realizaron refuerzos a los soportes para que sean seguros a la
hora de simular el frenado. Se eligió el método de soldadura por arco eléctrico
al ser de fácil disponibilidad debido a que se contaba con la máquina.
Además, fue necesario un sistema para simular el movimiento de los 4 discos
y se pueda entender de mejor manera el funcionamiento del sistema ABS.
Dichos sistemas se analizan más adelante.

16
3.1. ELEMENTOS MECÁNICOS
Para le elección de los elementos mecánicos que iban a ser adaptados a la
estructura previamente se analizó como está formado el conjunto de la
suspensión del automóvil seleccionado; el vehículo consta de frenos de disco
y tambor delanteros y posteriores respectivamente, pero por disponibilidad, en
el simulador se realizó con frenos de disco tanto en la parte delantera como
en la parte posterior; para el sistema ABS es necesario los siguientes
elementos:
3.1.1. MANGUETA DE DIRECCIÓN
Fue necesaria la adquisición de este conjunto debido a como se puede
apreciar en la figura 6 en la mangueta se encuentra la perforación donde
ingresa el sensor de rpm del sistema ABS, además este elemento tiene varios
puntos que permiten sujetarlo a la estructura.
Figura 6. Mangueta, buje y perforación para sensor de RPM.
3.1.2. DISCOS DE FRENO Y MORDAZAS
En la figura 7 se puede observar los discos y mordazas adquiridos, para el
simulador se requirió cuatro discos y cuatro mordazas del vehículo ya
mencionado. Para una mejor diferenciación se eligió pintar las mordazas
delanteras de color rojo y de color amarillo para las mordazas posteriores, lo
que ayudará a los estudiantes o a las personas que utilicen el simulador a
poderse guiar.

17
Figura 7. Disco de freno y mordaza.
3.1.3. PUNTAS DE EJE
Se adquirió las puntas de eje que ingresen en los bujes de las manguetas,
porque es en este elemento donde se alojan la rueda fónica como se observa
en la figura 8. Cabe recalcar que las ruedas fónicas contienen 47 dientes que
es la especificación del fabricante para que los sensores puedan medir los
rpm a las que giran las ruedas.
Figura 8. Punta de eje con rueda fónica.
3.1.4. SERVOFRENO Y CILINDRO PRINCIPAL
Como se puede observar en la figura 9 la estructura ya constaba con un
servofreno y un cilindro principal que no son del modelo del vehículo que se
eligió, pero luego de realizar varias pruebas no fue un inconveniente para el
frenado de los discos puesto que la presión que transmite el cilindro principal
es suficiente para poder frenar los discos.

18
Figura 9. Servofreno con bomba de freno.
3.1.5. CAÑERÍAS
En la figura 10 se puede ver las cañerías utilizadas que tienen una medida
estándar de 4.8 mm. De la misma manera que se pintaron las mordazas se
eligió el mismo color para las cañerías para que se pueda diferenciar las líneas
de presión delantera y posterior.
Figura 10. Cañerías de freno.
(Alibaba, 2017).
3.2. SISTEMA DE PROPULSIÓN DE LOS DISCOS
Para la elección del sistema para propulsar a los 4 discos de freno se
analizaron dos tipos de motores; de combustión interna y eléctricos, tomando
en cuenta parámetros aplicables al objetivo del simulador más no aplicados a
su rendimiento ni a la contaminación que emiten, este análisis es presentado
en la tabla 2.

19
Tabla 2. Valoración de sistemas de propulsión para discos.
Parámetro a valorar
Justificación Valoración
Motor de combustión interna Motor eléctrico
Motor de combustión
interna
Motor eléctrico
Sobrecargas En el frenado el motor no sufre daños puesto
que se acciona el embrague y queda
desacoplado el motor de la transmisión y en caso de no accionar el embrague el motor se
apagaría, haciendo que el motor no sufra sobreesfuerzos
Al accionar el freno el motor está sometido a
esfuerzos pues sigue transmitiendo potencia y torque
mientras los discos frenan,
comprometiendo el sistema piñón
cadena elegido
5/5
3/5
Mantenimiento Al no forzar el motor no sufriría daños en sus componentes, lo que
hace que no sea necesario
mantenimientos correctivos sino los
mantenimientos preventivos propios de
un motor de combustión interna.
Al forzar el motor en el frenado, sus componentes internos como bobinas y rotor
sufrirían daños, lo que representaría un
rebobinado muy anticipado del motor,
lo mismo que acarrea mayores
costos.
4/4
2/4
Par y potencia Debido al diseño del motor de combustión,
es capaz de mover mayores cargas pues está dotado de una
transmisión, con esto el motor movería los
cuatro discos sin mayor esfuerzo implicando así que no se deba comprar motores más grandes.
Al tener que mover los cuatro discos
implica una potencia elevada lo que
acarrea comprar motores más grandes y por
consiguiente más costosos.
5/5
3/5
Alimentación Al estar alimentado de combustible el motor de combustión no necesita de voltajes altos para su funcionamiento, además
para su arranque es necesario una batería
de 12 V
Si se requiere un motor más grande
con mayores potencias y torques, por ende se requiere
de tensiones de alimentación más
fuertes del orden de los 220 a 380 V lo que hace que este
motor deba funcionar en lugares específicos donde
se tenga este tipo de voltajes.
5/5
3/5

20
Tabla 2. Valoración de sistemas de propulsión para discos… continuación.
Régimen de giro
Al estar dotado de una transmisión, permite
tener varios regímenes de giro pudiendo así realizar pruebas a
distintos rangos de rpm.
Presentan un régimen de giro
constante, haciendo necesario adaptar
otro tipo de elementos para poder variar sus
rpm, lo que implica más costos, y sobre
todo realizar pruebas a un solo régimen de giro.
3/3
2/3
TOTAL/ 22 22 13
Como se puede determinar en la valoración el motor más adecuado para
implementar al simulador es el motor de combustión interna debido a que
presenta múltiples ventajas frente al motor eléctrico.
3.2.1. MOTOR DE COMBUSTIÓN INTERNA
Según el análisis anterior el motor indicado para el movimiento de los discos
es el de combustión interna, para una mejor elección del motor se realizó el
cálculo de la potencia necesaria para mover los cuatro discos.
Para el cálculo de la potencia se aplicó la ecuación 1 como se muestra a
continuación:
Tomando en cuenta que el trabajo es fuerza x distancia es necesario calcular
que fuerza o peso presentan los discos mediante la ecuación
Los discos tienen una masa de 7 Kg multiplicando este valor por los cuatro
discos del simulador nos da un valor de 28 Kg, Para determinar el peso que
tienen los discos en la estructura se utilizó la ecuación 1 quedando el cálculo
de la siguiente forma:
𝐹 = 𝑚. 𝑔
𝐹 = 28 𝐾𝑔 𝑥 9.8 𝑚/𝑠2
𝐹 = 274.4 𝑁
Para calcular la distancia se tomó en cuenta el perímetro del disco, pues es la
distancia que recorrería linealmente el disco en una vuelta el mismo que es
calculado mediante la ecuación 2.
𝑃𝑑𝑖𝑠𝑐𝑜 = 2𝜋𝑅
𝑃𝑑𝑖𝑠𝑐𝑜 = 2𝜋(0.118 𝑚)
𝑃𝑑𝑖𝑠𝑐𝑜 = 0.74 𝑚
Obtenidos los datos anteriores se reemplazan en la ecuación 3 de potencia la
misma quedaría de la siguiente forma:

21
𝑃 =𝑊
𝑡
𝑃 =𝐹. 𝑃𝐷𝑖𝑠𝑐𝑜
𝑡
𝑃 =274.4 𝑁 𝑥 0.74 𝑚
60 𝑠
𝑃 = 3.38 𝑊 = 0.00338 𝐾𝑤
Según el valor resultante de los cálculos se necesita un motor que pueda
generar una potencia de 0.00338 Kw
Se disponía de un motor de una motocicleta Ranger que cubría las
características para el movimiento de los discos, cuyos datos técnicos se
describen en la tabla 3.
Tabla 3. Datos técnicos del motor de combustión interna
Cilindrada 200 cc
Potencia 11 Kw a 750 rpm
Torque 14 N.m a 600 rpm
Nota: los datos de la tabla fueron tomados del manual de la motocicleta Ranger 200 cc.
(RIMEXCO, 2016).
Como se puede observar en la figura 11 el motor esta sostenido por tres
puntos de apoyo con pernos.
Al ser un motor de altas revoluciones, y en si al tener varias partes móviles el
motor trasmitía mucha vibración a la estructura, para eso fue necesario pegar
caucho vulcanizado en los puntos de apoyo a la estructura, para reducir la
vibración y al momento de utilizar el sistema no presente anomalías ni
molestias a las personas que utilizan el simulador.
Para reducir el ruido del motor se adaptó un tubo de escape ubicado en la
parte posterior de la estructura
Figura 11. Base de motor.

22
El motor se acelera mediante cable como se puede observar en la figura 12,
se extendió un cable hacia el panel de instrumentos para un correcto y exacto
control del mismo. Para el accionamiento del embrague fue necesario soldar
un tubo redondo 19.25 mm de diámetro por 2 milímetros de espesor a la
estructura en la parte superior del panel de instrumentos lo más cerca hacia
el motor debido a que según varias pruebas que se hizo el cable del embrague
no se acciona correctamente cuando tiene un recorrido bastante amplio, es
por eso que se adquirió un cable de embrague original y se extendió desde el
tubo soldado hacia el embrague del motor simulando el manubrio de una moto
como se muestra en la figura 12.
Figura 12. Manubrio de embrague y cable de acelerador.
3.2.1.1. Depósito de combustible
Un elemento muy importante para la alimentación del motor además de la
batería, es el depósito de combustible, el motor al no poseer un sistema de
bombeo de combustible es necesario que el tanque se encuentre elevado
para que de esta forma el combustible llegue al carburador por gravedad. Se
adaptó un depósito de combustible que se encuentra ubicado cerca del panel
de control como se puede apreciar en la figura 13, en esta parte no interfiere
al momento de realizar la simulación.
Figura 13. Ubicación del depósito de combustible.

23
Del depósito debe salir la manguera del combustible, esta llega directamente
al carburador como se muestra en la figura 14.
Figura 14. Conexión de manguera a carburador de motor
3.3. TRANSMISIÓN DE POTENCIA
Para una correcta transmisión de la potencia del motor hacia los discos se
analizaron varios sistemas de transmisión existentes en el mercado, su
análisis se detalla en la tabla 4.
Tabla 4. Sistemas de transmisión de potencia
SISTEMA VENTAJA DESVENTAJA
Polea-banda
Bajo costo de instalación
Sistema silencioso No necesita lubricación
No adecuado para transmitir grandes potencias
Puede sufrir resbalamientos Necesita un mecanismo para
su correcta tensión
Piñón-cadena
No se producen resbalamientos Mayor rendimiento
No debe estar demasiada tensa para transmitir movimiento
Transmite grandes potencias sin romperse y sin necesidad de estar muy tenso
Ruidoso Costoso
Sistema de engranajes
Relación de transmisión constante.
Mayor rendimiento mecánico
Costoso Lubricación constante para
evitar el desgaste de los engranajes
Para la transmisión de potencia se eligió el sistema piñón-cadena
principalmente porque la transmisión del motor viene con un piñón y para
evitarse adaptaciones se siguió con el diseño de una moto, además este
sistema es más efectivo que el sistema polea-banda debido a que mantiene
una relación constante debido a que no existen deslizamientos entre el piñón
del motor y el piñón de las llantas delanteras por lo tanto se tiene una mayor
eficiencia mecánica. (Cejarosu, 2002). Para el movimiento de los discos se

24
necesita que estos giren a altas velocidades para que el sistema ABS
comience a funcionar esto recae en que se necesita transmitir altas potencias
y el sistema polea-banda puede sufrir roturas mientras que el sistema elegido
es más resistente.
Para la transmisión del movimiento del motor hacia las ruedas delanteras se
eligió una relación de transmisión de 1:2, es decir se aumentó la relación de
transmisión porque los sensores de cada rueda al ser inductivos necesitan
que la rueda gire a altas velocidades para comenzar a dar una señal a la
computadora. Mientras la transmisión del motor gira una vuelta los discos
giran dos vueltas, para esto se adquirió un piñón de ocho dientes, la
transmisión del motor constaba de un piñón de quince dientes del mismo paso
del piñón anterior como se puede observar en las figuras 15, 16.
Para el correcto templado de la cadena fue necesario adaptar un templador
de cadena en la estructura porque la cadena quedaba demasiado floja, este
templador ayuda a que la cadena pueda trasmitir la potencia sin perdidas
mecánicas. Este templador se puede apreciar en la figura 16.
Figura 15. Piñón de transmisión de moto.
Figura 16. Sistema de transmisión.

25
Para el eje posterior no se extendió cadena desde el mismo motor debido a
que solo cuenta con el espacio para un solo piñón como se puede observar
en la figura 15 y 16, por esta razón fue necesario instalar un piñón en uno de
los ejes más largos de las ruedas delanteras y el otro piñón en el eje de las
ruedas posteriores como se observa en la figura 17. Para que la relación de
transmisión no tenga ninguna variación se instalaron dos piñones de veintiún
dientes, ya que se necesita una relación directa.
Figura 17. Transmisión de los discos delanteros y posteriores.
Se seleccionó una cadena simple que cubre las características de los piñones
seleccionados.
3.3.1. CÁLCULO PARA LA LONGITUD DE CADENA
Para evitar desperdiciar la cadena fue necesario aplicar la ecuación 9, con los
siguientes datos:
Distancia entre los centros de los ejes: 373 mm o 14.68 plg.
Número de dientes del piñón conductor: 15
Número de dientes del piñón conducido: 8
Paso de la cadena: ½
C: 14.68 plg, la cadena ocupada es de paso 40 es decir de 1/2, quedando la
operación de la siguiente manera

26
𝐶 =14.68 𝑝𝑙𝑔
0.5= 29.36
𝑆 = 15 + 8 = 23
𝐷 = 15 − 8 = 7
Según el anexo 4 para el valor 7 el fabricante da un valor de 1,24.
Ahora reemplazando todos los valores en la ecuación 9 se tiene que:
𝐿 = 2 (29.36) + 23
2+
1.24
23
𝐿 = 84.63 𝑒𝑠𝑙𝑎𝑏𝑜𝑛𝑒𝑠
Aproximando el valor anterior por exceso debido a los decimales arrojados en
la conversión de milímetros a pulgadas se eligió una cadena de 85 eslabones.
Para la cadena que va desde el eje delantero hacia los discos posteriores los
datos son los siguientes:
Distancia entre los centros de los ejes: 670 mm o 26.37 plg
Número de dientes del piñón conductor: 21
Número de dientes del piñón conducido: 21
Paso de la cadena: ½
C: 26.37 plg. La cadena ocupada es de paso 40 es decir de 1/2, quedando la
operación de la siguiente manera
𝐶 =26.37 𝑝𝑙𝑔
0.5= 52.74
𝑆 = 21 + 21 = 42
𝐷 = 21 − 21 = 0
Según el anexo 4 para el resultado 0 no existe valor, por esa razón se tomó
el valor de 0.
Ahora reemplazando todos los valores en la ecuación 9 se tiene lo siguiente:
𝐿 = 2 (52.74) + 42
2+
0
42
𝐿 = 126.48 𝑒𝑠𝑙𝑎𝑏𝑜𝑛𝑒𝑠
Aproximando el valor anterior por exceso debido a los decimales arrojados en
la conversión de milímetros a pulgadas se eligió una longitud de cadena de
127 eslabones.

27
3.4. DIFERENCIAL Y EJES
Se eligió un diferencial del vehículo Chevrolet Corsa Evolution que tiene un
tamaño relativamente pequeño a comparación de otros diferenciales. La
principal razón para elegir este elemento fue que este mecanismo permite
frenar cualquiera de las dos llantas independientemente sin que se frene la
otra mientras todo el diferencial sigue girando, esto ayuda para la
demostración del sistema de frenos ABS. De esta forma se pretende bloquear
el disco frontal derecho mientras los demás siguen girando con esto el EBCM
interpretara que una llanta se frena mientras las demás siguen girando lo que
indicará un derrape.
En uno de los extremos del diferencial va fijado el piñón de 8 dientes que va
a permitir dar movimiento a los discos.
3.4.1. EJES.
Para la transmisión de movimiento del motor hacia los discos fue necesaria la
fabricación de tres ejes; al estar sometidos a esfuerzos fue necesario realizar
cálculos para determinar si estos soportarían el esfuerzo generado por el
motor.
3.4.1.1 Cálculos del Eje principal.
Como se puede ver en la figura 18 este eje es el que recibe el movimiento del
motor hace girar al disco y de la misma forma transmite el movimiento hacia
el eje posterior, por estas razones se analiza este eje puesto que es el que
soporta más esfuerzo.
Figura 18. Eje principal.
El diagrama donde se muestran las fuerzas que actúan en el sistema de
transmisión, se muestran en la figura 19.

28
Figura 19. Diagrama de fuerzas en el eje principal.
Como se observa en la figura 19, en el eje actúan varias fuerzas y reacciones
que se detallan a continuación:
El eje está apoyado en el punto A y en el punto D como se observa en la
figura 19, en estos puntos van a ver reacciones tanto en el eje x como en él
y, estos se encuentran a una distancia de 50 y 25 mm respectivamente.
Como se detalla en la figura 20 la cadena que impulsa el eje principal, y está
conectada al piñón B, tiene un ángulo de inclinación, es por esta razón que
se toma en cuenta las fuerzas que actúan tanto en el eje x como en el eje Y,
se pudo determinar que el ángulo de la cadena es de 40°.
Figura 20. Inclinación de cadena del eje principal.

29
En el caso del piñón C está conectado al otro eje de forma paralela
transmitiendo fuerza solamente en el eje x, por esta razón se toma en cuenta
la componente de la fuerza en el eje x como se puede apreciar en la figura
19.
Para realizar el cálculo se tienen los siguientes datos:
Material del eje: acero de transmisión A36.
𝑆𝑦 = 260 𝑀𝑝𝑎. Resistencia a la fluencia del acero, tomado del anexo 7
𝑆𝑢𝑡 = 410 𝑀𝑝𝑎 Resistencia a la rotura del acero tomado del anexo 7
r1= 30 mm= 0.03 m
r2= 30 mm= 0.03 m
r3= 35 mm= 0.35 m
Para el cálculo se tomó en cuenta que la potencia que da el fabricante del
motor es una potencia ideal, es decir si el motor funciona a nivel del mar,
debido a que el motor funciona en la sierra el motor no su potencia ideal, se
disminuyó 40% de su eficiencia, quedando los valores de la siguiente forma:
P= 11 kW =11000 W= 14.75 Hp-5.8= 8.60 Hp
W= 750 rpm= 78.53 rad/s.
Con los datos que se tienen se procedió a realizar el cálculo de las reacciones
en el eje
El torque máximo que genera el motor al eje principal se calcula mediante la
ecuación 4 como se detalla a continuación
𝑃 = 𝑇 𝑥 𝑛
Despejando T de la ecuación 4 se tiene:
𝑇 = 𝑃
𝑛
𝑇 = 63025.4 𝑥 8.6 𝐻𝑝
750 𝑟𝑝𝑚
𝑇 = 722.7 𝑙𝑏. 𝑖𝑛 = 81.65 𝑁. 𝑚
El resultado anterior es el torque máximo que da el motor al eje entre los
puntos A y B a 750 rpm.
El torque en todo el eje se obtiene mediante la siguiente relación de
transmisión en donde se relaciona el torque 1 y 2 y las velocidades angulares
así:

30
𝑇1
𝑇2=
𝑁1
𝑁2
Despejando T2 se tiene:
𝑇2 =𝑁1 𝑥 𝑇1
𝑁2
𝑇2 =750 𝑥 722.7
600
𝑇2 = 903.37 𝑙𝑏. 𝑖𝑛 = 102.06 𝑁. 𝑚
Calculo de fuerzas en el piñón D1:
Para el cálculo de las fuerzas en D1 se utilizó la ecuación 5:
𝐹𝐵 =𝑇
𝑟
𝐹𝐵 =102.06 𝑁. 𝑚
0.03 𝑚
𝐹𝐵 = 3402 𝑁
Debido a que la cadena tiene un ángulo de inclinación fue necesario obtener
los valores de las fuerzas tanto en el eje x como en él y, como se muestra en
la figura 21, realizando el análisis de la siguiente forma.
40°
Figura 21. Grado de inclinación y componentes de cadena.
Para la componente en x se tiene la siguiente ecuación:
𝐹𝐵𝑥 = 𝐹𝐵. sin 40°
𝐹𝐵𝑥 = 2186.76 𝑁
Para la componente en y se tiene la siguiente ecuación:
𝐹𝐵𝑦 = 𝐹𝐵. cos 40°
𝐹𝐵𝑦 = 2606.08 𝑁
𝐹𝐵𝑦
𝐹𝐵𝑋

31
Calculo de fuerzas en el piñón D2.
En el caso del piñón 2 al no tener un ángulo de inclinación se aplicó la
ecuación 5:
𝐹𝑐=
𝑇
𝑟
𝐹𝐶 =102,06 𝑁. 𝑚
0.035 𝑚
𝐹𝐶 = 2916 𝑁
Como se aclaró anteriormente este piñón no presenta inclinación es por eso
que se tomó en cuenta solo la componente en x quedando de la siguiente
forma:
𝐹𝐶𝑥 = 2916 𝑁
𝐹𝐶𝑦 = 0 𝑁
Una vez obtenidos los datos de las fuerzas y torques que actúan en los
piñones y apoyos se procedió a realizar el cálculo de las reacciones en los
apoyos A y D:
𝛴𝐹𝑥 = 0
𝑅𝐴𝑥 + 𝑅𝐷𝑥 + 𝐹𝐶𝑥 + 𝐹𝐵𝑥 = 0
𝑅𝐴𝑥 + 𝑅𝐷𝑥 = 𝐹𝐶𝑥 + 𝐹𝐵𝑥
𝑅𝐴𝑥 + 𝑅𝐷𝑥 = 2186,76 𝑁 + 2916 𝑁
𝑅𝐴𝑥 + 𝑅𝐷𝑥 = 5102.760 𝑁
Para el eje y se tiene lo siguiente:
𝛴𝐹𝑦 = 0
𝑅𝐴𝑦 + 𝑅𝐷𝑦 − 𝐹𝐵𝑦 = 0
𝑅𝐴𝑦 + 𝑅𝐷𝑦 = 𝐹𝐵𝑦
𝑅𝐴𝑦 + 𝑅𝐷𝑦 = 2606.08 𝑁
Con respecto al punto A, realizando la sumatoria de momentos se puede
obtener 𝑅𝐴𝑦 𝑦 𝑅𝐵𝑦 de la siguiente forma:
𝛴𝑀𝑥 = 0
𝐹𝐵𝑦. ( 0.070) − 𝑅𝐵𝑦 . (0.495) = 0
𝑅𝐷𝑦 =2606.08 𝑁 𝑥 0.070
0.495
𝑅𝐷𝑦 = 368.53 𝑁

32
Para la reacción 𝑅𝐴𝑦 se tiene lo siguiente:
𝑅𝐴𝑦 + 𝑅𝐷𝑦 = 2606.08 𝑁
𝑅𝐴𝑦 = 2606.08 𝑁 − 368.53 𝑁
𝑅𝐴𝑦 = 2237.55 𝑁
Con los datos obtenidos se puede determinar que en el apoyo A en la
componente en Y, va a haber una reacción de 2237.55 N, con respecto al
apoyo D en la componente en X, va a tener una reacción de 632.2 N.
Para obtener 𝑅𝐷𝑥 se realizó la sumatoria de momentos en el eje Y quedando
de la siguiente forma:
𝛴𝑀𝑦 = 0
−𝐹𝐵𝑥 (0.070 𝑚) − (0.16) . 𝐹𝐶𝑥 + 𝑅𝐷𝑥 (0.495) = 0
−2186.76 (0.070 𝑚) − (0.16) . 2916.0 + 𝑅𝐵𝑥 (0.495)
𝑅𝐷𝑥 =619.63
0.495
𝑅𝐷𝑥 = 1251.78 𝑁
La reacción 𝑅𝐴𝑥 se obtuvo reemplazando los valores de la siguiente forma:
𝑅𝐴𝑥 + 𝑅𝐷𝑥 = 5102.760
𝑅𝐴𝑥 = 5102.7 − 1251.78
𝑅𝐴𝑥 = 3851 𝑁
Obtenidos los valores de las reacciones en el apoyo A y D, específicamente
en su componente en x, se tiene que el apoyo A tiene una reacción de 6605.
1 N y en el caso del apoyo D, 2147 N.
Para tener más claro los valores de las reacciones y las fuerzas que actúan
en el eje, en la tabla 5 se detallan los valores obtenidos.
Tabla 5. Fuerzas y reacciones que se dan en el eje principal
𝑅𝐴𝑥 = 3851 𝑁 𝐹𝐵𝑥 = 2186,76 𝑁
𝑅𝐴𝑦 = 2237.55 𝑁 𝐹𝐵𝑦 = 2606,08𝑁
𝑅𝐷𝑥 = 1251.78 𝑁 𝐹𝐶𝑥 = 2916 𝑁
𝑅𝐷𝑦 = 368.53 𝑁 𝐹𝐶𝑦 = 0 𝑁
Graficas de esfuerzo cortante:
Una vez obtenidas las fuerzas y las reacciones se procede a realizar la gráfica
de esfuerzo de corte en x, a la que está sometido el eje como se muestra en
la figura 22.

33
A B C D
A
B
D
C
2854.4 N
3851 N
1251.78 N A
Figura 22. Grafica de esfuerzo cortante en X del eje principal.
Como se observa en la figura 22 en la sección A-B se observa un esfuerzo
cortante de 3851 N, en la sección B-C un esfuerzo de 2854.4 N, y en la sección
C-D un esfuerzo de 1251.78 N.
En el caso del eje Y la representación de la gráfica de esfuerzo de corte quedó
como se muestra en la figura 23.
Figura 23. Grafica de esfuerzo cortante en el eje Y.
En el eje Y se tiene que en la sección A-B, existe un esfuerzo cortante de
2237.55 N, y para la sección B-D se tiene un esfuerzo de 632.2 N.
En la figura 24 se precisa el diagrama de momento flector en los planos xz.
(-)
(+)
(-)
2237.55 N
368.53 N
(+)

34
145.71 N
N
A B C D
B A C D
156.6 N
X
Figura 24. Grafica de momento flector en plano xz
Como se puede apreciar en la figura 24 en la sección A-B el eje soporta un
momento máximo de 462.4 N, en la sección B-C, un momento máximo de
719.3 N
En la figura 25 se observa el diagrama de momento flector en el plano yz.
Figura 25. Grafica de momento flector en el plano yz
Como se detalla en la figura 25 el eje soporta una fuerza máxima de 156.6 N
en la sección A-B, y una fuerza máxima de 145.71 N en la sección BC.
Diagrama de momentos:
En la figura 26 se detalla la gráfica de momentos en los planos x, y, z, con las
respectivas fuerzas que actúan en cada uno
(+)
Z
719.3 N
269.5 N

35
. Figura 26. Diagrama de momentos en todos los planos.
Determinación de la sección critica.
Se calculó este factor para saber cuál es la sección que sufrirá el mayor
esfuerzo en el eje.
Este parámetro se calculó mediante la siguiente expresión que no es más que
la suma de momentos.
𝑀𝐵 = (156.622 + 269.572)1/2
𝑀𝐵 = 311.74 𝑁. 𝑚
𝑀𝐶 = (123.452 + 419.342)1/2
𝑀𝐶 = 437.13 𝑁. 𝑚
Según el análisis se puede determinar que 𝑀𝐶 > 𝑀𝐵 por esta razón la sección
crítica se encuentra en el punto C.
Debido a que el eje ya se construyo fue necesario determinar el factor de
seguridad, para tener un índice de confiabilidad de que el eje no sufriría ningún
daño al funciona, dicho factor se calculó mediante la ecuación 6 como se
detalla a continuación.
𝑑 = 32. 𝑛
𝜋. 𝑆𝑦[𝑀2 +
3𝑇2
4]
1/2
1/3
0.035 = 32. 𝑛
𝜋. 250𝑥106𝑃𝑎[(437.13)2 +
3(102.06)2
4]
1/2
1/3
4.28𝑥10−5 = 1.81𝑥10−5. 𝑛
𝑛 = 2.36

36
Al ser mayor que uno el eje soporta la carga máxima del motor en el análisis
estático realizado.
Por ser el eje un elemento que se encuentra en constante movimiento fue
necesario realizar el análisis dinámico del mismo para eso fue necesario tomar
en cuenta la ecuación 7.
𝑑 = 48𝑛
𝜋[(
𝑇
𝑆𝑦)
2
+ (𝑀
𝑆𝑒)
2
]
1/2
1/3
Para la ecuación utilizada fue necesario determinar el factor 𝑺𝒆 mediante la
ecuación 8 que se obtiene con distintos valores establecidos a continuación.
𝑆𝑒′ = 0.5 𝑆𝑢𝑡
𝑆𝑒′ = 205 𝑀𝑝𝑎
𝐾𝑎 = 𝑑. 𝑆𝑢𝑡1𝑏
𝐾𝑎 = 1.58 𝑥 410−0.085
𝐾𝑎 = 0.947
𝐾𝑏 = 0.879. 𝑑−0.107
𝐾𝑏 = 1.58 𝑥 (35.1
25.4)
−0.085
𝐾𝑏 = 0.85
𝐾𝑐 = 1
𝐾𝑑 = 1 𝑠𝑖 𝑡 ≤ 450°𝐶
𝐾𝑒 = 1 𝑐𝑜𝑛𝑓𝑖𝑎𝑏𝑖𝑙𝑖𝑑𝑎𝑑 50%
𝐾𝑓 = 0.9
Reemplazando todos los factores en la ecuación 8 para encontrar 𝑺𝒆 se
obtuvo que:
𝑆𝑒 = 0.957 𝑥 0.85 𝑥 1 𝑥1 𝑥1 𝑥0.9𝑥 𝑆𝑒′
𝑆𝑒 = 165.5 𝑀𝑝𝑎
Una vez obtenido el factor 𝑺𝒆 se reemplazaron los datos en la ecuación 7
descrita anteriormente para encontrar el factor de seguridad, quedando de la
siguiente forma:
𝑑 = 48𝑛
𝜋[(
𝑇
𝑆𝑦)
2
+ (𝑀
𝑆𝑒)
2
]
1/2
1/3
0.0353 =48. 𝑛
𝜋[(
102.06
250𝑥106)
2
+ (437.14
165.5𝑥106)
2
]
1/2

37
4.28𝑥 10−5 = 𝑛 𝑥 4.08𝑥10−5
𝑛 = 1.05
Según el análisis dinámico realizado el valor obtenido al ser igual que 1 indica
que el eje puede soportar la potencia que genera el motor, se tomó en cuenta
que el eje no va a trabajar constantemente, es por eso que el factor de
seguridad se acepta para este eje.
3.4.1.2 Cálculos del eje posterior.
Como se observa en la figura 27 el eje posterior recibe la fuerza del eje
principal hacia un solo piñón, y por ende transmite el movimiento a los discos
posteriores por esa razón los análisis se realizaron de diferente forma.
Figura 27. Disposición del eje posterior
En la figura 28 se detallan las fuerzas y reacciones que actúan en el eje
posterior.
Figura 28. Diagrama de fuerzas, reacciones y momentos en eje posterior.

38
En la figura 29 se pueden apreciar las distancias a las que se encuentran los
apoyos y el piñón.
Figura 29. Distancias de apoyos, y piñón eje posterior
Para este eje se tienen los siguientes datos:
Material del eje= acero A36
𝑆𝑦 = 260 𝑀𝑝𝑎. Resistencia a la fluencia del acero, tomado del anexo 7
𝑆𝑢𝑡 = 410 𝑀𝑝𝑎. Resistencia a la rotura del acero tomado del anexo 7
Las medidas que tiene el eje, consideradas para eje fueron:
Diámetro del eje= 35 mm
Diámetro de los discos de freno= 236 mm
Diámetro piñón 3= 70 mm
Torque= 102.06 Nm
Para determinar M1 se realizó la siguiente relación:
𝑀1 = 2 𝑀2
𝑇2 = 𝑀2
𝑇2 = 102.06/2
𝑇2 = 51.03 𝑁
El eje posterior soporta diferentes fuerzas al momento de frenar los discos,
por esta razón se realizó el siguiente análisis en donde se utiliza la ecuación
5.
𝐹𝑒 =𝑇2
𝑟
𝐹𝑒 =51.03 𝑁
0.118 𝑚
𝐹𝑒 = 432.45 𝑁

39
Al producirse la misma fuerza en los dos discos se tiene el siguiente resultado:
𝐹𝑔 = 𝐹𝑒
La fuerza transmitida al piñón 2 es la que transmite el eje principal, resultado
que ya fue obtenido y tiene un valor de:
𝐹𝐷𝑋 = 2916 𝑁
Como el caso anterior se procedió a obtener las reacciones que se tienen en
los apoyos y en este caso en el piñón que recibe el movimiento del eje
principal, realizando sumatoria de momentos se obtuvo los siguientes
resultados.
𝛴𝐹𝑥 = 0
𝑅𝐴𝑥 + 𝑅𝐵𝑥 = 𝐹𝐷𝑥
𝑅𝐴𝑥 + 𝑅𝐵𝑥 = 2916 𝑁
𝛴𝐹𝑦 = 0
𝐹𝑔 − 𝐹𝑒 + 𝑅𝐴𝑦 + 𝑅𝐵𝑦 = 0
𝑅𝐴𝑦 = 𝑅𝐵𝑦
Con respecto al punto B las reacciones son las siguientes:
𝛴𝑀𝑥 = 0
𝐹𝑒 𝑥 (0.025) − 𝑅𝐵𝑦 𝑥(0.625) + 𝐹𝑔 (0.65) = 0
432.45 𝑥 (0.025) − 𝑅𝐵𝑦 𝑥(0.625) + 432.45 (0.65) = 0
𝑅𝐵𝑦 = 467.04 𝑁
𝑅𝐴𝑦 = 467.04 𝑁
Para el eje x las reacciones son las siguientes
𝐹𝐷𝑋 𝑥(0.85) − 𝑅𝐵𝑥(0.625) = 0
𝑅𝐵𝑥 =0.385
0.625. 2916
𝑅𝐵𝑥 = 1796.25 𝑁
𝑅𝐴𝑥 = 1119.75 𝑁

40
1119.75 N
1796.25 N
A B C D E
A B
C D E
32.7 N
432.45 N
En la tabla 6 se especifica detalladamente las fuerzas y las reacciones
obtenidas y que actúan en el eje:
Tabla 6. Reacciones y fuerzas que actúan en el eje posterior
𝑅𝐴𝑥 = 1119.75 𝑁 𝐹𝑒𝑥 = 0
𝑅𝐴𝑦 = 467.04 𝑁 𝐹𝑒𝑦 = 432.45 𝑁
𝑅𝐵𝑥 = 1796.25 𝑁 𝐹𝑔𝑥 = 0
𝑅𝐵𝑦 = 467.04 𝑁 𝐹𝑔𝑦 = 432.45 𝑁
𝐹𝐷𝑥 = 2916 𝑁
𝐹𝐷𝑦 = 0
Una vez obtenidas todas las reacciones que se dan en el eje posterior se
procedió a realizar los diagramas.
Como se aprecia en la figura 30, el diagrama de esfuerzo cortante en el eje x,
el eje se comporta de la siguiente forma:
Figura 30. Grafica de esfuerzo cortante en eje x
Como se observa en la figura 30 en la sección B-C sufre un esfuerzo 1119.75
N y en la sección C-D sufre un esfuerzo de 1796.25 N.
En la figura 31 se detallan los esfuerzos cortantes que se dan en el eje y.
Figura 31. Grafica de esfuerzo cortante en eje y
(-)
(+)
)
(-) (-)

41
431.10 N
Z
X
B C D E
10.8 N
10.8 N
1.78 N
y
z
Según la figura 31 en la sección A-B y D-E se tiene un esfuerzo de 432.45 N
y en la sección B-D un esfuerzo de 32.7 N.
Una vez realizados los diagramas de esfuerzos cortantes se procedió a
realizar los diagramas de momentos flectores en el plano xz como se observa
en la figura 32.
Figura 32. Grafica de momento flector plano xz, eje posterior.
Como se observa en la figura 32 en la sección B-D sufre un esfuerzo de
431.10 N.
Para el plano yz se tiene la siguiente gráfica, como se aprecia en la figura 33.
Figura 33. Grafica momento flector plano yz eje posterior
Como se observa en la figura 33 en la sección A-B el eje sufre un esfuerzo de
10.8 N, en la sección B-C un esfuerzo de 4.33 N, y en la sección C-D sufre un
esfuerzo de 10.8 N
Para este eje se realizó el cálculo de la sección crítica mediante la siguiente
expresión:
𝑀𝑐 = (1.782 + 431.102)1/2
𝑀𝑐 = 431.10 𝑁, 𝑚
A B C D E
A

42
Con lo obtenido de la expresión anterior se pudo determinar que el mayor
esfuerzo soporta la sección C, es decir la sección que soporta mayor esfuerzo
es la del piñón pues es en esta parte donde se transmite la fuerza de impulso.
Al estar el eje ya fabricado se procedió a calcular el factor de seguridad
basándose en la teoría de la distorsión mediante la ecuación 6.
𝑑 = 32. 𝑛
𝜋. 𝑆𝑦[𝑀2 +
3𝑇2
4]
1/2
1/3
0.035 = 32. 𝑛
𝜋. 250𝑥106𝑃𝑎[(431.10)2 +
3(102.06)2
4]
1/2
1/3
4.28𝑥10−5 = 1.74𝑥10−5. 𝑛
𝑛 = 2.46
Según el análisis estático el factor de seguridad obtenido es mayor a 1 lo que
indica que el eje soporta los esfuerzos a los que está sometido estáticamente.
Realizado el análisis estático se procedió a realizar el análisis dinámico
mediante la ecuación 7.
𝑑 = 48𝑛
𝜋[(
𝑇
𝑆𝑦)
2
+ (𝑀
𝑆𝑒)
2
]
1/2
1/3
Para el factor 𝑺𝒆 se obtiene con distintos valores establecidos a continuación.
𝑆𝑒′ = 0.5 𝑆𝑢𝑡
𝑆𝑒′ = 205 𝑀𝑝𝑎
𝐾𝑎 = 𝑑. 𝑆𝑢𝑡1𝑏
𝐾𝑎 = 1.58 𝑥 410−0.085
𝐾𝑎 = 0.947
𝐾𝑏 = 0.879. 𝑑−0.107
𝐾𝑏 = 1.58 𝑥 (25.1
25.4)
−0.07
𝐾𝑏 = 0.88
𝐾𝑐 = 1
𝐾𝑑 = 1 𝑠𝑖 𝑡 ≤ 450°𝐶
𝐾𝑒 = 1 𝑐𝑜𝑛𝑓𝑖𝑎𝑏𝑖𝑙𝑖𝑑𝑎𝑑 50%
𝐾𝑓 = 0.9

43
Reemplazando todos los factores en la ecuación 8 para encontrar 𝑺𝒆 se
obtuvo que:
𝑆𝑒 = 0.947 𝑥 0.88 𝑥 1 𝑥1 𝑥1 𝑥0.9𝑥 𝑆𝑒′
𝑆𝑒 = 175.5 𝑀𝑝𝑎
Una vez obtenido el factor 𝑺𝒆 se reemplazaron los datos en la ecuación 7
descrita anteriormente para encontrar el factor de seguridad, quedando de la
siguiente forma:
𝑑 = 48𝑛
𝜋[(
𝑇
𝑆𝑦)
2
+ (𝑀
𝑆𝑒)
2
]
1/2
1/3
0.0353 =48. 𝑛
𝜋[(
102.06
250𝑥106)
2
+ (431.1
175.5𝑥106)
2
]
1/2
5.7𝑥 10−5 = 𝑛 𝑥 3.81𝑥10−5
𝑛 = 1.12
Con el factor de seguridad obtenido que es mayor a 1 se pudo determinar que
el eje puede trabajar a la potencia que brinda el motor sin sufrir daños, y con
la confianza que al momento de simular el frenado el eje no sufrirá
sobreesfuerzos, ni existirá riesgo de rotura, además estos valores indican que
en el punto donde se encuentra el piñón y los apoyos no sufrirán daños.
3.5. COMPONENTES DEL SISTEMA ABS
3.5.1. MÒDULO DE CONTROL ELECTRONICO DE FRENOS
A diferencia de varios sistemas en donde el módulo de control electrónico se
encuentra separado del módulo de control hidráulico, el EBCM utilizado para
el banco se encuentra en un solo cuerpo ahorrando así espacio. Como se
especificó anteriormente el EBCM utilizado pertenece al vehículo AVEO
EMOTION, el mismo consta de las siguientes partes especificadas en la figura
34 y cuyas características son:
Marca: MANDO
4 canales 4 sensores
Alimentación: 9-16 voltios

44
Figura 34. Partes principales del EBCM.
Las válvulas y solenoides se encuentran alojadas en la parte interna de la
unidad de control hidráulico lo que hace imposible tomar información y las
señales de los solenoides y las electroválvulas.
3.5.2. SENSORES DE VELOCIDAD DE RUEDA
El sistema utiliza sensores inductivos que se caracterizan por ser sensores
más grandes en comparación con sensores de efecto Hall por ejemplo,
además tienen menor precisión, y no comienzan a funcionar hasta que la
llanta adquiere una velocidad angular determinada. Para saber con mayor
precisión la velocidad angular de los discos y su equivalencia en velocidad
lineal es decir a la velocidad que va el vehículo se realizó los cálculos a 30
Km/h a 50 Km/h a 80 Km/h y a 100 Km/h para eso se utilizó la ecuación 10
cuyos datos se precisan a continuación.
Radio de los discos de freno: 118 mm que para efectos de cálculo es
necesario que esta medida esté en metros es decir 0.118 m.
Velocidad lineal: 30 Km/h de igual forma es necesario que este parámetro esté
expresado en sistema internacional; lo que equivale a 8.33 m/s.
𝑊 =𝑉
𝑅
𝑊 =8. 33 𝑚/𝑠
0.118 𝑚
𝑊 = 70.60 𝑟𝑎𝑑/𝑠

45
Realizando la conversión de radianes a rpm tomando en cuenta que 2𝜋
radianes es una revolución se tiene el siguiente resultado:
70.60 𝑟𝑎𝑑
𝑠 𝑥
1 𝑟𝑒𝑣
2𝜋 𝑟𝑎𝑑𝑥
60 𝑠
1 𝑚= 6653.90 𝑟𝑝𝑚
De la misma forma se realiza para los 50 km/h.
Velocidad lineal: 13.88 m/s
𝑊 =𝑉
𝑅
𝑊 =13.88 𝑚/𝑠
0.118 𝑚
𝑊 = 117.62 𝑟𝑎𝑑/𝑠
Realizando la conversión se tiene el siguiente resultado:
117.62 𝑟𝑎𝑑
𝑠 𝑥
1 𝑟𝑒𝑣
2𝜋 𝑟𝑎𝑑𝑥
60 𝑠
1 𝑚= 11085.42 𝑟𝑝𝑚
Para los 80Km/h se presentan los siguientes resultados:
Velocidad lineal: 22.22 m/s
𝑊 =𝑉
𝑅
𝑊 =22.22 𝑚/𝑠
0.118 𝑚
𝑊 = 188.30 𝑟𝑎𝑑/𝑠
Realizando la conversión se tiene el siguiente resultado:
188.30 𝑟𝑎𝑑
𝑠 𝑥
1 𝑟𝑒𝑣
2𝜋 𝑟𝑎𝑑𝑥
60 𝑠
1 𝑚= 17746.85 𝑟𝑝𝑚
Para los 100Km/h se presentan los siguientes resultados:
Velocidad lineal: 27.77 m/s
𝑊 =𝑉
𝑅
𝑊 =27.77 𝑚/𝑠
0.118 𝑚
𝑊 = 235.33 𝑟𝑎𝑑/𝑠

46
Realizando la conversión se tiene el siguiente resultado:
235.33 𝑟𝑎𝑑
𝑠 𝑥
1 𝑟𝑒𝑣
2𝜋 𝑟𝑎𝑑𝑥
60 𝑠
1 𝑚= 22179.33 𝑟𝑝𝑚
En la tabla 7 se puede observar los valores obtenidos tanto de la velocidad
lineal y la velocidad angular a la que giran los discos:
Tabla 7. Comparación entre la velocidad lineal y angular de discos.
V= (Km/h) W rueda =rpm
30 Km/h 6653.90 rpm
50 Km/h 11085.42 rpm
80 Km/h 17746.85 rpm
100 Km/h 22179.33 rpm
Como se mencionó anteriormente los sensores inductivos no comienzan a
funcionar hasta que la rueda adquiere una velocidad angular determinada
debido a que al tener velocidades lentas la señal de salida del sensor tiende
a ser cero (WinuE, 2011). Lo que hace obligatorio que para que el sistema
tenga un funcionamiento más preciso, las ruedas deben girar a unas 6653.90
rpm lo que equivale a unos 30Km/h (Autoavance, 2015) es decir a 6653.90
rpm como se muestra en la tabla.
Para un correcto funcionamiento se adquirió los sensores pertenecientes al
mismo vehículo como se puede observar en la figura 35.
Figura 35. Sensor de velocidad delantero
Debido a que el vehículo escogido tiene frenos de disco en la parte delantera
y de tambor en la parte posterior los sensores son diferentes en cuanto a
forma, pero para la simulación no interfiere este parámetro.
3.6. MONTAJE DE LOS COMPONENTES
Como se observa en la figura 36 para el montaje de todos los elementos del
sistema ABS fue necesario retirar los elementos que existían en el banco

47
incluyendo los componentes eléctricos pues estos eran frenos convencionales
a los que resultaba difícil la adaptación a un sistema ABS y no cumplían las
características de los componentes eléctricos y electrónicos que se
necesitaba para que el simulador sea más didáctico que el anterior.
Figura 36. Sustitución de los elementos del banco de frenos originales.
Los materiales ocupados para la adaptación de los componentes del sistema
ABS se pueden observar en la tabla 8.
Tabla 8. Materiales utilizados para el montaje de los elementos.
MATERIAL UTILIZACIÓN MEDIDA
Tubo estructural rectangular
Soportes para manguetas de dirección
Bases para chumaceras
62 x 41.5 x 2 mm
Tubo estructural cuadrado
Muestrario de disco y tambor. Refuerzo para soporte de disco
posterior derecho Refuerzo de soporte de mangueta
Soportes para motor de combustión
25.4 mm x 2mm 40 mm x4 mm
Angulo estructural en L
Soportes para pernos de fijación de manguetas
Refuerzo de soporte de disco posterior izquierdo
1 plg x 2 mm
Perfil estructural en U
Base de apoyos de disco y tambor del muestrario
Base para disco delantero derecho
10mm x 3mm
Tabla triplex Tablero de instrumentos 4 mm espesor
Una vez removidos todos los elementos del simulador anterior se procedió a
fijar el diferencial a la estructura, para esto se utilizó un tubo rectangular de 62
x 41.5 x 2 mm, estas medidas del tubo hacen que el diferencial se quede
suspendido sin topar ninguna superficie y gire libremente.

48
Luego de fijar el tubo rectangular se realizaron 4 perforaciones en los tubos
para de esta forma fijar las chumaceras y en estas ingrese el diferencial como
se observa en la figura 37.
Figura 37. Diferencial unido a chumaceras y fijado al tubo rectangular.
Como se observa en las figuras 38 y 39 se procedió a fabricar los soportes
que sostendrán a las manguetas de los discos delanteros y posteriores. Los
soportes fueron fabricados con un tubo rectangular 62 x 41.5 x 2 mm ya que
soporta grandes esfuerzos y en el extremo se unió un perfil en L de una 1 plg
x 2 mm en los que se realizaron dos perforaciones para que ingresen dos
pernos 7/16 sosteniendo la mangueta como se puede observar en la figura
40.
Figura 38. Corte de tubo rectangular para soportes.
Figura 39. Soldado de tubo rectangular para soportes.

49
Figura 40. Soportes construidos, con perforaciones en ángulos.
Una vez fabricados los soportes, estos fueron soldados a la estructura
midiendo la altura y a la distancia a la que deben quedar los discos de freno
siempre cuidando de queden bien alineados y no queden torcidos, para eso
fueron necesarios los ejes, para mayor seguridad al momento de la
demostración debido a que se está transmitiendo potencias altas y al
momento de frenar puede existir alguna rotura o fatiga de alguno de los
soportes; por esa razón estos fueron reforzados para que puedan aguantar
cualquier esfuerzo con la ayuda de un tubo cuadrado de 40.25 mm x 2mm, y
un perfil en L de 1” 7/16 el mismo que se soldó al larguero del soporte. Por
otra parte, el tubo se soldó desde la estructura hacia el esfuerzo hecho con el
ángulo con esto la mangueta no se podrá balancear como se muestra en la
figura 41.
Figura 41. Refuerzos de soportes de discos.

50
Para los discos posteriores la adaptación se hizo de otra forma debido a que
se contaba con dos rotulas del mismo vehículo seleccionado, principalmente
se eligió este elemento porque permiten mover las manguetas a cualquier
altura y con esto poder nivelar las dos manguetas para que el eje ingrese
correctamente. Las rotulas fueron cortadas para que queden a la misma altura
que los discos posteriores y fueron soldadas a una base hecha de pletina de
4 milímetros y un perfil en U de 2 milímetros como se observa en la figura 42.
Figura 42. Soportes de discos posteriores.
Una vez realizados los soportes de los discos de frenos se procedió a montar
todos los elementos mecánicos previamente discutidos. Se muestra su
disposición final en la figura 43.
Figura 43. Simulador con 4 discos y transmisión de potencia

51
3.7. ALIMENTACIÓN Y PROTECCIÓN DEL SISTEMA
Según el manual del EBCM el fabricante especifica que el modulo trabaja con
un voltaje de 9 a 16 voltios para eso se eligió una batería automotriz la misma
que tiene una de capacidad de 60 Ah, amperaje necesario para que pueda
funcionar el motor de sobrepresión, este dato se encuentra en la figura y un
voltaje de 12 V necesario para que el EBCM pueda funcionar y la misma
también permite arrancar el MCI, y suministra el voltaje necesario para
alimentar a las luces y accesorios del simulador.
Tanto el motor como el EBCM están conectados en un solo circuito; con un
interruptor de dos posiciones que enciende todo el circuito es decir tanto del
motor de combustión interna y el modulo ABS, en el mismo interruptor viene
integrado un testigo luminoso que indica el encendido de todo el sistema.
Como se observa en la figura 44.
Figura 44. Interruptor de encendido general.
Se utilizó un interruptor de tres posiciones para el encendido del módulo ABS,
como se muestra en la figura 45; con esto se puede encender el modulo
independientemente del motor, y es de gran ayuda para la demostración
puesto que este elemento permite hacer pruebas con y sin ABS.
Figura 45. Interruptor de encendido de EBCM
Para el encendido del motor se utilizó un pulsador normalmente abierto, y de
la misma forma para el apagado debido a que para apagar al motor se
necesita una señal negativa, estos pueden ser observados en las figuras 46,
47.

52
Figura 46. Interruptor de encendido de MCI
Figura 47. Interruptor de apagado MCI
En la figura 48 se encuentra especificado el circuito general del simulador para
un mejor entendimiento de cómo se realizaron las conexiones, y poder
verificar si en un caso el sistema sufre averías.
Figura 48. Esquema eléctrico del banco.
Como se puede observar en el circuito anterior el fabricante utiliza un fusible
de 60 A para la alimentación del EBCM esto se debe que el motor de la bomba
utiliza alrededor de 50 A para su funcionamiento, este dato se puede verificar
en el circuito principal del sistema ABS en la figura 36. De la misma forma
según las especificaciones del motor, para protección del sistema de
encendido del motor el fabricante recomienda utilizar un fusible de 15 A.

53
3.7.1. INDICADORES LUMINOSOS
Se utilizó LED de alta intensidad de 3V a los que se les agregó una resistencia
de 1KΩ para que pueda funcionar con los 12V que suministra la batería, estos
ayudan a indicar la activación varios componentes del sistema como el EBCM
y luz de stop. Se instaló también un aviso para el nivel bajo de fluido de líquido
de frenos, en la tabla 9 se precisa el color de LED y que parámetro indica.
Estos elementos representan una gran ayuda a la hora de realizar prácticas
pues permite diferenciar que elementos funcionan o si es que algún elemento
presenta alguna falla.
Tabla 9. Designación de testigos LED.
COLOR DE LED PARAMETROS
Rojo Luz de parada
Azul Testigo de nivel bajo de líquido de frenos
Azul Indicador de encendido de EBCM
Blanco Indicador de encendido sistema general
(incluido en interruptor de encendido general)
Amarillo Fallo ABS
En la tabla 10 se especifica la numeración del cable utilizado en cada
componente del circuito eléctrico y en las conexiones del EBCM.
Tabla 10. Numeración de cables y su utilización en el banco
Numeración AWG
Color Utilización
12
Rojo
Conexión para alimentación de todo el circuito. Tierra general de batería hacia chasis.
Conexión de tierra de batería hacia bornera Conexión de bobina de encendido de MCI.
Señal de tierra para MCI
14 Blanco Señales de tierra del EBCM
16 Verde claro Señales positivas de fusibles hacia pines del EBCM
Conexiones positivas de las luces de freno
18
Negro Extensión de cableado de los sensores
Verde oscuro
Extensión de cableado de los sensores Extensión de señal positiva para encendido de MCI
3.8. CONEXIÓN DEL EBCM
Para la conexión del EBCM, fue necesario basarse en el circuito eléctrico del
sistema especificado en el manual de servicio del fabricante, el mismo que se
observa en la figura 49, y las principales señales que necesita la EBCM son:

54
Figura 49. Señales de entrada que necesita el EBCM.
(GENERAL MOTORS, 2006)
- Dos señales de alimentación directo de la batería (Pines 9 y 25).
- Una señal de encendido del interruptor principal cuya señal se simula
con el interruptor de dos posiciones (Pin 4).
- Señal del pulsador del pedal del freno (Pin 18).
- Dos señales de tierras (Pines 8 y 24).
- Señal para conexión DLC para comunicación con escáner (Pin 7).

55
Se añaden a lo anterior cuatro señales de rotación de los neumáticos
provenientes de los sensores, cuya conexión se especifica en la figura 50. Se
debe verificar la conexión de todas las señales para que el módulo pueda
funcionar y se realicen las pruebas sin ningún problema.
Figura 50. Conexión de sensores de velocidad de ruedas.
(GENERAL MOTORS, 2006)
Cada señal especificada en el circuito se conectó al EBCM basándose en el
esquema del conector principal especificado en la figura 51.
Figura 51. Conector principal del EBCM.
(GENERAL MOTORS, 2006)

56
Para la conexión fue necesario también basarse en la tabla 11, en donde se
especifica el numero de pin y su designación.
Tabla 11. Designación de pines y funciones.
PIN FUNCIÓN
1 Señal de retorno del sensor de velocidad de la rueda delantera derecha
2 Señal del sensor de velocidad de la rueda delantera derecha
3 Señal de carretera áspera
4 Voltaje de encendido. (Switch)
5 Señal de retorno del sensor de velocidad de la rueda posterior izquierda
6 Señal del sensor de velocidad de la rueda posterior izquierda
7 Señal (DLC)
8 Tierra
9 Voltaje positivo de batería
10-15 Sin uso
16 Señal de fallo del freno
17 Sin uso
18 Tensión de suministro de la luz de frenado
19 Señal del sensor de velocidad de la rueda frontal izquierda
20 Señal de retorno del sensor de velocidad de la rueda frontal izquierda
21 Sin uso
22 Señal de retorno del sensor de velocidad de la rueda posterior derecha
23 Señal del sensor de velocidad de la rueda posterior derecha
24 Tierra
25 Voltaje positivo de batería
Nota: los datos de la tabla fueron tomados y traducidos del manual de servicio del Chevrolet
Aveo 2006, realizado por General Motors Corp.
(GENERAL MOTORS, 2006)
Una vez identificados los pines del EBCM se realizó la instalación en el banco
llevando los cables de los elementos hacia el panel principal para eso se
adquirió una caja de fusibles automotriz la misma que es de gran ayuda
porque tiene 8 tomas cada una con un fusible y soporta una corriente hasta
de 125 A, este elemento es el encargado de distribuir las señales positivas a
todos los componentes como se muestra en la figura 52. Con este elemento
se puede identificar de manera más fácil las señales positivas que utiliza el
sistema haciendo que las personas que utilicen el banco puedan realizar
mediciones y comprobaciones de manera más eficiente debido a que es de
fácil acceso y se encuentra en el panel de control

57
A la caja de fusibles se conectó el positivo de la batería el mismo que alimenta
a toda la caja de fusibles, de esta se sacó un cable hacia el interruptor general
el que como se explicó enciende o apaga todo el circuito y a esta se
conectaron las señales positivas que necesita el EBCM:
Figura 52. Caja de fusibles señales positivas.
Para la conexión de las señales de tierras se ocupó una bornera de 30
amperios a las que se conectó cada borne para que queden energizados los
bornes ocupados, en este elemento se conectó el borne negativo de la batería
como se observa en la figura 53. Cabe recalcar que de la batería se realizó
una conexión desde el negativo hacia el chasis para así tener una señal de
tierra general si en un caso se necesita conectar otro elemento.
Figura 53. Conexiones negativas del EBCM.
3.9. ELEMENTOS DE MONITOREO DE FUNCIONAMIENTO
Al simulador se instalaron elementos que permiten a las personas que utilicen
el mismo, comprender de mejor manera como actúa el sistema, estos
elementos son los siguientes:

58
3.9.1. MANÓMETROS DE PRESIÓN
Estos elementos permiten medir la presión que existe cuando se acciona el
pedal de freno, se instalaron dos manómetros uno para la presión de las
mordazas delanteras y otro para la presión de las mordazas posteriores. Al
haber vibración que se debe al funcionamiento del motor se adquirieron
manómetros con glicerina como se observa en la figura 54.
Figura 54.Manómetros con glicerina.
3.9.2. MEDICIÓN DE VELOCIDAD DE RUEDAS
Para verificar de mejor manera a cuanta velocidad están girando los discos
fue necesario implementar un sistema electrónico que permitiera apreciar este
parámetro tan importante para el sistema, como se mencionó anteriormente
es necesario que el sistema alcance una velocidad determinada de 30 Km/h
o 6653 rpm aproximadamente para que el EBCM pueda actuar. Para este
sistema se utilizaron los siguientes elementos:
3.9.2.1. Sensores
Para el conteo de RPM de los discos se utilizaron 4 encoder como se observa
en la figura 55, los mismos que fueron utilizados porque estos son sensores
ópticos infrarrojos que emiten una señal cuando algún objeto se interpone
entre el emisor y el receptor, son de fácil acople a cualquier superficie a
diferencia de otros sensores y no presentaron problemas al momento de su
funcionamiento. Para esto fue necesario construir cuatro ruedas dentadas que
se acoplan a los ejes de los discos.
Figura 55. Sensor infrarrojo o encoder

59
3.9.2.2. Pantalla
En la figura 56 se puede observar la pantalla utilizada cuyas características
principales son: pantalla de cristal líquido con luz de fondo de 16x2, se usó
este tipo de pantalla por su bajo costo, disponibilidad y sobre todo no se
necesita mostrar gran cantidad de información, solo los cuatro datos
numéricos de las revoluciones de cada disco. La pantalla se encuentra
ubicada en el tablero de mandos del simulador
Figura 56. Pantalla LCD 16x2
3.9.2.3. Microcontrolador
Se utilizó un PIC 16F877A que recibe las señales de los sensores infrarrojos,
procesa la información, y luego es mostrada en la pantalla en la figura 57 se
puede observar los pines de este microcontrolador.
Figura 57. Pines de microcontrolador 16F877A
En la figura 58 se puede apreciar un diagrama de bloques, en el mismo se
muestran las señales de entrada que procesa el PIC 16F877A y los datos que
muestra en la pantalla LCD:

60
Figura 58. Señales de entrada y salida del microcontrolador.
Para una mejor compresión en la figura 59 se puede apreciar un diagrama de
flujo con la programación del PIC y bajo qué condiciones trabaja.
Figura 59. Diagrama de condiciones funcionamiento de medidor de rpm.
Sensor 1
PIC
16
F8
77
A
D1: # rpm D3: # rpm
D2: # rpm D4: # rpm
Sensor 2
Sensor 3
Sensor 4
INICIO DE BITS DE
DATOS
Configurar puertos de entrada y salida
Iniciar puertos en 0
Inicio del conteo:
Conteo del puerto 3= rpm 1
Conteo del puerto 4= rpm 2
Conteo del puerto 5= rpm 3
Conteo del puerto 6= rpm 4
Si rpm 1 cuenta 8 dientes marcar 1 rpm.
Si rpm 2 cuenta 8 dientes marcar 1 rpm.
Si rpm 3 cuenta 8 dientes marcar 1 rpm.
Si rpm 4 cuenta 8 dientes marcar 1 rpm.
Volver al inicio.
El sensor
no cuenta
8 dientes

61
Como se muestra en la figura 60, todos los elementos mencionados fueron
conectados a una placa hecha de baquelita, para su posterior adaptación a
la estructura.
Figura 60. Placa electrónica
3.9.2.4. Conector DLC (Data link Conector)
Se instaló un conector DLC con protocolo OBD2 (On Board Diagnostic)
ubicado en el tablero de mandos de la estructura. El mismo permite tener una
comunicación integral con el EBCM permitiendo la lectura y borrado de
códigos de falla, pruebas de actuadores y motor eléctrico, purgado del
sistema, verificación en tiempo real del módulo. Para la conexión del conector
se necesitan las siguientes señales puntualizadas en la figura 61, cuya
designación es la siguiente:
- Pin 16: alimentación 12V
- Pines 4 y 5: masa.
- Pin 7: comunicación con el EBCM, el mismo se conecta hacia el PIN
7, del módulo electrónico.
Figura 61. Señales de conector de comunicación con escáner.
(Meganeboy, OBD (On Board Diagnostic), 2014).

62
3.9.2.5. Terminales de medición para sensores
Para una correcta medición de los parámetros de funcionamiento de os
sensores se instaló en el panel terminales tipo banana hembra, que permiten
realizar mediciones y monitorear cada sensor de velocidad, además se instaló
dos terminales que permiten medir que voltaje o amperaje llega hacia el
EBCM, así mismo se instaló dos terminales para medir la continuidad del
interruptor de freno en caso de que presente daños como se muestra en la
figura 62.
Figura 62. Conectores hembra para monitoreo de sensores.
3.10. PRUEBAS DE FUNCIONAMIENTO
3.10.1. FUNCIONAMIENTO GENERAL
Antes de realizar pruebas del sistema ABS se realizaron pruebas de
funcionamiento del motor, movimiento de los discos, la transmisión de
potencia, el circuito de frenos y el circuito eléctrico.
En cuanto al MCI no se notó ningún problema de funcionamiento, el mismo
se enciende rápidamente, su aceleración es normal, el accionamiento del
embrague es exacto cuando se necesita frenar.
El movimiento de los discos es normal, estos no tienen ningún rozamiento
en alguna parte de la estructura, no presentan ningún desacople con los
ejes, ni comprometen ninguna parte de la estructura.
En cuanto la transmisión de potencia. La transmisión de la potencia hacia
las ruedas delanteras desde el motor es normal, no existen
resbalamientos, ni tensiones por parte de la cadena. La transmisión hacia
las ruedas posteriores se efectúa sin problema, dando una relación igual
para los cuatro discos.
Se verificó el circuito de frenado puesto que al transmitir liquido puede
presentar fugas, para eso fue necesario la utilización de teflón en las tomas
de las cañerías hacia las mordazas y hacia el EBCM debido a que en

63
algunos puntos presentaba fugas, esto hace que no exista un correcto
sellado del sistema, dejando escapar la presión y sobre todo dejando
entrar aire al sistema comprometiendo la eficiencia del sistema. Las
cañerías llevadas del EBCM hacia las mordazas no interfieren en el
funcionamiento de ningún componente.
3.10.2. FUNCIONAMIENTO DE COMPONENTES DE MEDICIÓN
En lo referente al manómetro, al realizar el frenado el manómetro mide
correctamente la presión existente en las líneas de freno, al tener la glicerina
la pluma no presenta grandes variaciones por la vibración del motor.
En cuanto al medidor de revoluciones electrónico, realiza la medición de
manera exacta.
El conector para el escáner funcionó correctamente permitiendo tener una
conexión normal con el escáner y poder monitorear el funcionamiento y el
buen estado del EBCM.
Los testigos luminosos cumplieron su funciona de indicar el encendido de los
elementos, además el testigo de líquido de frenos no se encendió
comprobando así que el nivel es el correcto y que el sistema de frenos puede
funcionar sin problemas.
3.10.3. FUNCIONAMIENTO DEL SISTEMA ABS
Realizadas las pruebas a los sistemas mencionados se procedió a realizar
pruebas de funcionamiento del sistema ABS.
Para eso fue necesario conectar el EBCM al escáner, para verificar si existen
códigos de fallas. Se registraron varios códigos de fallas que fueron borrados.
Como en un vehículo fue necesario sacar el aire existente en las líneas de
presión porque si existe aire en las cañerías el sistema no tiene un frenado
eficiente, para eso se realizó el mismo proceso que se realiza en el vehículo.
Luego de bombear el pedal de freno, se pisó hasta el fondo y se procedió a
aflojar las purgas de las mordazas, realizando este proceso hasta notar que
el pedal de freno se endurece.
Además, se realizó un testeo general del módulo verificando el correcto
funcionamiento de las electroválvulas tanto de entrada como de salida, y el
funcionamiento del motor de sobrepresión, resultando todas estas pruebas
satisfactorias. Cabe mencionar que con el escáner se puede realizar la purga
de sistema.
Se revisaron los sensores de velocidad de la rueda, que se encuentren bien
ubicados en las manguetas y con la ayuda de un calibrador de láminas se
verificó que tengan el correcto entrehierro entre la rueda fónica y el sensor
debido a que si se encuentran demasiado cerca de la rueda pueden sufrir
daños, dando información errónea al módulo de control electrónico, además

64
se midió la resistencia de cada sensor para verificar si se encuentran en buen
estado estos datos se encuentran especificados en la tabla 12.
Tabla 12. Entrehierro y resistencia de los sensores
Entrehierro Resistencia
Sensores de velocidad delanteros
0.5 - 1.2 mm
988 - 1.208
ohmios
Sensores de velocidad
posteriores
0.6 - 1.2 mm
2.295 – 2.500
ohmios
Nota: los datos de la tabla fueron tomados y traducidos del manual de servicio del Chevrolet
Aveo 2006, realizado por General Motors Corp.
(GENERAL MOTORS, 2006)
Comprobadas las condiciones anteriores se realizaron pruebas del frenado
del sistema, se realizaron pruebas sin ABS y con ABS arrojando los siguientes
resultados.
Sin ABS los discos frenan instantáneamente cuando se pisa abruptamente el
pedal de freno.
Con ABS se notó una variación en el tiempo de frenado, los discos no se
detuvieron instantáneamente como la condición anterior, para aseverar esta
demostración se realizaron 5 pruebas dando los resultados mostrados en la
tabla 13.
Tabla 13. Resultados de la simulación del sistema ABS.
TIEMPO DE FRENADO
Pruebas Con ABS Sin ABS
1 0.50 segundos 0.23 segundos
2 0.59 segundos 0.26 segundos
3 1.0 segundo 0.25 segundos
4 0.55 segundos 0.23 segundos
5 0.58 segundos 0.23 segundos
Como se puede notar en la tabla anterior el tiempo de frenado con ABS y sin
ABS es demasiado corto comparado con el tiempo de frenado de un vehículo
convencional, la principal razón para esto es que los discos no tienen carga,
suficiente y no se puede notar el bloqueo de una rueda, pero como se explicó
en la teoría el sistema ABS permite tener un frenado progresivo cuando se
pisa abruptamente el pedal del freno, para de esta forma dar control
direccional de las ruedas.
Debido a que el sistema actuó normalmente no fue necesario forzar el bloqueo
de ninguna llanta al momento de la simulación.

65
Con las pruebas realizadas se podría pensar que el ABS es un sistema
ineficiente pues al actuar el ABS el vehículo se demora en frenar totalmente,
lo que conlleva a que en casos reales el vehículo colisione con algún cuerpo
que se atraviese. Al contrario de lo que se puede pensar esta demora en el
frenado significa que al no frenar rápidamente el vehículo no tiene un bloqueo
total de la rueda ya que el frenado es progresivo, la liberación y aplicación de
presión que realiza el EBCM ayuda a que se pueda tener maniobrabilidad en
la dirección al momento de una frenada extrema y por consiguiente poder
esquivar cualquier obstáculo que se presente.
Verificación de la presión
Debido a que cuando el ABS actúa, las diferencias de presión son
instantáneas el manómetro no puede detectar la liberación de presión de las
mordazas o el aumento de la presión. En todas las pruebas cuando se pisó el
pedal de freno no se vio ningún cambio en la presión, la misma subía hasta
los 200 PSI y se mantenía en el mismo valor.

4. CONCLUSIONES Y RECOMENDACIONES

66
4. CONCLUSIONES Y RECOMENDACIONES
4.1. CONCLUSIONES
La modificación del simulador de un sistema por disco-tambor a un sistema
de frenos ABS con cuatro discos permite ampliar los conocimientos en el
campo automotriz de los estudiantes de la carrera para que estén
preparados para las nuevas tecnologías en sistemas de seguridad que
vienen incorporados en vehículos nuevos
Contar con una estructura previamente diseñada y que tenía el espacio
suficiente, permitió adaptar los componentes sin ningún problema, además
la misma no sufrió daños cuando funciono todo el sistema, dando la
seguridad de que se pueden realizar prácticas sin preocuparse en que la
estructura no resista el movimiento de los discos, y el funcionamiento del
motor.
La adaptación de los componentes se realizó con soldadura eléctrica que
es la adecuada para soldar la tubería de acero elegida para soportar el peso
de los elementos y los esfuerzos a que son sometidos.
Las pruebas realizadas al banco simulador dieron un resultado satisfactorio
puesto que se logró ver el proceso de frenado que realiza un vehículo
convencional, basándose en dos condiciones, con y sin ABS mostrando
visualmente como frena instantáneamente sin ABS en un tiempo promedio
de 0.30 segundos y con ABS teniendo un frenado progresivo en un tiempo
promedio de 1.0 segundos concluyendo así que el sistema ABS es más
eficiente que el convencional.
La colocación de borneras, tacómetro digital, manómetros y conector DLC
permite hacer un diagnóstico completo al sistema midiendo varios
parámetros como: la presión con la que frenan los discos, rpm a la que
giran los discos, lectura y borrado de códigos de falla, comprobación de
alimentación, resistencia y continuidad de elementos como sensores, luz
de stop, EBCM. Haciendo de este simulador un adecuado material
didáctico para quien necesita obtener datos técnicos del sistema ABS

67
4.2. RECOMENDACIONES
Implementar un sistema con elementos electrónicos que permita medir la
diferencia de presiones cuando funciona el módulo de control electrónico
de ABS dato que es imperceptible con los manómetros.
Instalar indicadores que ayuden a ver en qué momento actúan las
electroválvulas y el motor de sobrepresión.
Adaptar otro sistema de seguridad activa, utilizando los componentes
existentes en el simulador puesto que el ABS es la base de sistemas como
el EBD (Electronic Brake Distrbution), o TCS (Traction Control system)
entre otros.
Adaptar frenos de tambor posteriores para ver como es el comportamiento
del frenado del ABS con ese tipo de conjunto de freno.
Adicionar al simulador sistemas de protección que no permitan a las
personas acercarse a los discos cuando estos están girando ya que al
estar sin ninguna protección cualquier persona que realice prácticas está
expuesta a engancharse a algún disco.

5. BIBLIOGRAFÍA

68
5. BIBLIOGRAFÍA
Alibaba. (10 de enero de 2017). Tuberia de acero de bajo carbono. Obtenido
de Alibaba.com: https://spanish.alibaba.com/product-detail/gb-t-24187-
2009-standard-low-carbon-compressor-tubes-copper-coated-precise-
tubes-in-compressor-4-76-0-7-mm-464892650.html
Autoavance. (2015). Tipos de sensores ABS (velocidad de rueda). Obtenido
de Blog Técnico Automotriz: http://www.autoavance.co/blog-tecnico-
automotriz/194-tipos-de-sensores-abs-velocidad-de-rueda
Cejarosu. (16 de febrero de 2002). Mecanismos para la transmisión de
movimientos. Obtenido de
http://concurso.cnice.mec.es/cnice2006/material107/imprenta/Textos/t
x_mecanismos.pdf.
GENERAL, M. (2006). Manual Chevrolet Aveo
.
GENERAVAPOR. (2017). Manometro 0-600 PSI con glicerina. Obtenido de
http://www.generavapor.com.pe/catalogo/manometros/310-
manometro-con-glicerina-0-600-psi-blue-ribbon.html
Gomez, J. (27 de enero de 2000). Teoría y operación de los frenos
antibloqueo. Obtenido de Webcusur:
http://148.202.105.18/webcucsur/sites/default/files/Teoria%20y%20Op
eracion%20de%20los%20frenos%20ABS2.pdf
INTERMEC. (15 de noviembre de 2013). Calculo de la longitud de cadena
requerida para una transmisión. Obtenido de
https://www.intermec.com.co/pdf/calculo_longitud_cadena.pdf
Meganeboy, D. (2014). ESP programa electrónico de estabilidad. Obtenido de
Aficionados a la mecanica:
http://www.aficionadosalamecanica.net/sistema-esp.htm
Meganeboy, D. (2014). OBD (On Board Diagnostic). Obtenido de Aficionados
a la mecánica: http://www.aficionadosalamecanica.com/obd2.htm
Meganeboy, D. (2014). On board diagnostic. Obtenido de Aficionados a la
mecánica: http://www.aficionadosalamecanica.com/obd2.htm
Mott, R. (1995). Diseño de elementos de maquinas. Naualcapan de Juarez:
Prentice Hall.

69
Mott, R. (2009). Resistencia de materiales. Naualcapan de Juarez: Prentice
Hall.
Mullo, W., & Pumasunta, D. (2008). "Diseño y construcción de un modulo de
entrenamiento del sistema de frenos antibloqueo "ABS" con EHCU Y
EBCM". Obtenido de Repositorio ESPE:
http://repositorio.espe.edu.ec/bitstream/21000/3872/1/T-ESPEL-
0466.pdf
Muñoz, J. (21 de febrero de 2007). El ABS. Obtenido de
www.mecanicoautomotriz.org.
Muñoz, M. (2005). Diseño de maquinas. Obtenido de
http://ocw.uc3m.es/ingenieria-mecanica/diseno-de-maquinas/material-
de-estudio/ejes_transparencias.pdf
Oliveros, J. (2012). Miller manul de reparación de automoviles. Barcelona:
Grafos.
Picmind. (2017). Utilizando LCD 16X02. Obtenido de picmind.es:
http://picmind.es.tl/Uitlizando-LCD-16x2.htm
RIMEXCO. (2016). Ranger 200. Obtenido de RIMEXCO JAPON:
http://www.rimexco-aa.com/productos/ranger-200
Sandro. (23 de junio de 2010). ABS y Sistema de control de tracción . Obtenido
de Mecanica automotriz.org:
https://drive.google.com/file/d/0B_vOBUOWJUUgbzRvOVRpLWM4Zk
0/view
Shigley, Joseph, E., & Mischke. (1992). Diseño en ingenieria mecánica.
Mexico DF: MCGRAW-HILL.
WinuE. (22 de julio de 2011). Manual mecanica automotriz Sensores en el
automovil. Obtenido de www.mecanicoautomotriz.org:
https://www.mecanicoautomotriz.org/406-manual-mecanica-
automotriz-sensores-en-el-automovil

6. ANEXOS

70
6. ANEXOS
Anexo 1. Guía de usuario del simulador
Para la correcta utilización del simulador se deben seguir los siguientes pasos:
1. Revisar el nivel de gasolina del motor de combustión interna y el nivel de
líquido de frenos.
2. Colocar la batería en la parte inferior derecha del tablero, y conectar e
borne positivo (cable rojo) y el borde negativo (cable negro).
3. Conectar a un tomacorriente de 110V el adaptador del sistema de
medición de rpm.
4. Revisar que no exista ningún elemento que no interfiera con el movimiento
de los discos.
5. Activar el sistema accionando el interruptor de encendido general
6. Para realizar la simulación sin ABS, se debe encender el motor siempre
accionando el manubrio del embrague y luego presionar el botón de
encendido. Se deja de accionar el embrague y el motor transmite el
movimiento hacia los discos.
7. Halar el cable del acelerador para que los discos adquieran velocidad
8. Accionar el embrague y presionar el pedal del freno.
9. Si se realizan pruebas con ABS se debe realizar el mismo proceso hasta
el paso 5, para luego encender el modulo del ABS accionando el interruptor
de tres posiciones.

71
10. Luego se realizan los pasos 6, 7 y 8.
11. Para apagar el sistema se debe accionar el embrague del motor, y se debe
mantener presionado el botón de apagado del motor.
12. Mover hacia la posición OFF el interruptor del módulo de control. Y realizar
la misma operación con el interruptor general.

72
Anexo 2. Lista de códigos de falla
DTC (Diagnostic Trouble Code), Condigo de Diagnostico de Fallas
DIAGNOSTICO
DTC C0014 Módulo de control electrónico de frenos
DTC C0017 Válvula moduladora de presión de frenos
DTC C0018 Control de salida frontal derecho
DTC C0021 Liberación hidráulica posterior derecha demasiado larga
DTC C0022 Control de motor de la bomba del ABS
DTC C0023 Rendimiento del servofreno
DTC C0024 Solenoide del servofreno
DTC C0025 Solenoide del servofreno
DTC C0026 Solenoide del servofreno
DTC C0027 Solenoide del servofreno
DTC C0028 Solenoide del servofreno
DTC C0032 Rueda fónica frontal izquierda
DTC C0033 Sensor de velocidad delantero derecho
DTC C0034 Reemplazo del parabrisas
DTC C0035 Mal funcionamiento del circuito del sensor de velocidad frontal izquierdo
DTC C0036 Rango/rendimiento sensor izquierdo frontal de velocidad de rueda
DTC C0037 Rango de rendimiento del circuito del sensor frontal izquierdo
DTC C0042 Interruptor de pedal de freno “A”
DTC C0043 Interruptor de pedal de freno “B”
DTC C0054 Módulo de control electrónico de frenos
DTC C0055 Circuito de sensor de velocidad de la rueda posterior
DTC C0056 Módulo de control electrónico de frenos
DTC C0061 Válvula moduladora de presión de frenos
DTC C0062 Módulo de control electrónico de frenos
DTC C0063 Módulo de control electrónico de frenos
DTC C0064 Módulo de control electrónico de frenos
DTC C0065 Mal funcionamiento del circuito del solenoide 2 frontal izquierdo
DTC C0066 Módulo de control electrónico de frenos
DTC C0067 Módulo de control electrónico de frenos
DTC C0068 Módulo de control electrónico de frenos
DTC C0095 Mal funcionamiento del circuito del solenoide 2 posterior derecho

73
DTC C1101 Falla del circuito de la válvula hidráulica
DTC C1102 Fallo en el circuito del interruptor de aceleración
DTC C1200 Circuito de la bobina de válvula de entrada frontal izquierdo a la batería
DTC C1201 Circuito de la bobina de válvula de entrada frontal izquierdo corto a masa
DTC C1202 Fallo del circuito de la bobina de la válvula de salida posterior
DTC C1203 Circuito abierto de la bobina de la válvula de salida posterior
DTC C1204 Corto a batería de la bobina de la válvula de salida posterior
DTC C1205 Corto a masa de la bobina de la válvula de salida posterior
DTC C1206 Fallo del circuito de la bobina de la válvula de entrada posterior
DTC C1207 Circuito abierto de la bobina de la válvula de entrada posterior
DTC C1208 Corto a batería de la bobina de la válvula de entrada posterior
DTC C1209 Corto a masa de la bobina de la válvula de entrada posterior
DTC C1210 Falla en el circuito de la bobina de a válvula de salida frontal derecha
DTC C1211 Mal funcionamiento de testigo del ABS
DTC C1604 Módulo de control electrónico de frenos
DTC C2112 Módulo de control electrónico de frenos
DTC C2402 Válvula moduladora de presión de frenos
Nota: los datos de la tabla fueron tomados y traducidos del manual de servicio del Chevrolet
Aveo 2006, realizado por General Motors Corp.
(GENERAL MOTORS, 2006)

74
Anexo 3. Programación del PIC 16F877A
DEVICE HS_OSC
DEFINE OSC 20
DEFINE LCD_DREG PORTD
' Set starting Data bit (0 or 4) if 4-bit bus
DEFINE LCD_DBIT 4
' Set LCD Register Select port
DEFINE LCD_RSREG PORTD
' Set LCD Register Select bit
DEFINE LCD_RSBIT 2
' Set LCD Enable port
DEFINE LCD_EREG PORTD
' Set LCD Enable bit
DEFINE LCD_EBIT 3
RPM1 var word
RPM2 var word
RPM3 var word
RPM4 var word
LCDOUT $FE, 1, "INICIANDO"
;5MINON
;5MINOFF
high portb.0
pause 2000
inicio:
high portb.1
count portb.3,1000,rpm1
count portb.4,1000,rpm2
low portb.1
count portb.5,1000,rpm3
count portb.6,1000,rpm4
RPM1=(RPM1*60)/8
RPM2=(RPM2*60)/8
RPM3=(RPM3*60)/8
RPM4=(RPM4*60)/8
lcdout $fe,1,"D1:",DEC4 RPM1
lcdout $fe,$89,"D2:",DEC4 RPM2
lcdout $fe,$c0,"D3:",DEC4 RPM3
lcdout $fe,$c9,"D4:",DEC4 RPM4
goto inicio

75
Anexo 4. Constante K para cálculo de longitud de cadena

76
Anexo 5. Esquema de estructura del simulador

77
Anexo 6. Esquema 3D de estructura del simulador

78
Anexo 7. Propiedades del acero.