ILS Y DME
13
Click here to load reader
-
Upload
misty-moore -
Category
Documents
-
view
47 -
download
1
Transcript of ILS Y DME

Instrument Landing System (ILS)
Se trata de un sistema de control de tierra que permite que un avioacuten sea guiado con precisioacuten durante la aproximacioacuten a la pista de aterrizaje y en algunos casos a lo largo de la misma
Consta de cuatro partes principales o subsistemas que transmiten informacioacuten a la aeronave
_ un localizador que da la informacioacuten de acimut es decir que actuacutea como guiacutea lateral y consta de varias antenas direccionales (entre 8 y 14) situadas normalmente a unos 300 m del final de la pista
_ un transmisor que indica la senda de planeo glideslope o glide path esta situado a un lado de la pista y es baacutesicamente la guia vertical del ILS
_ hasta tres radiobalizas la exterior la intermedia y la interior situados respectivamente a 7 km 1 km y 400 del punto de contacto con el suelo de la pista destinadas a dar informacioacuten tanto vertical como lateral estaacuten cayendo en desuso y se reemplazan por NDBs o por los datos del DME
_ un sistema de iluminacioacuten visual
Localizador y senda de planeo
Consiste en una agrupacioacuten de antenas que transmite a una frecuencia de portadora en el rango de 10810 a 11195 MHz 3 en el que se alojan 40 canales ILS (cada canal tiene una anchura de 50 kHz y solamente las centenas de kHz pares se utilizan 10810 10815 10830 etc pero no 10820 10825 10840 etc) Las antenas estaacuten agrupadas de manera que se transmiten dos loacutebulos simeacutetricos orientados hacia la derecha y hacia la izquierda de la pista Ambos loacutebulos transmiten una sentildeal con la misma portadora el loacutebulo radiado hacia la derecha estaacute modulado por 90 Hz y el loacutebulo izquierdo modulado a 150 Hz Sobre el plano definido por la bisectriz de los dos haces paralela a la pista y la vertical se verifica que ambas modulaciones en amplitud contribuyen igualmente a la sentildeal total A la derecha de este plano la profundidad de modulacioacuten de la sentildeal de 90 Hz es superior a la de 150 Hz y a la izquierda se presenta la situacioacuten inversa Por tanto la diferencia en la profundidad de modulacioacuten (difference in depth of modulation DDM) se convierte en una medida de la posicioacuten lateral del avioacuten La sentildeal del transmisor de la senda de planeo se basa en el mismo esquema pero con una portadora en el rango 329 a 335 MHz y con los loacutebulos desplazados uno con respecto al otro sobre un plano vertical Este plano se denomina plano de la senda de planeo y tiene un aacutengulo de 25 a 35 grados sobre la horizontal que es el aacutengulo de descenso nominal del avioacuten Esto queda indicado en el panel de mandos del avioacuten en un indicador donde dos agujas marcan cada una la posicioacuten relativa a los planos bisectores las agujas han de estar en posicioacuten vertical una y horizontal la otra para que el descenso se realice adecuadamente Ademaacutes de la sentildeal de navegacioacuten los localizadores emiten perioacutedicamente una sentildeal de identificacioacuten a1020 Hz con un coacutedigo Morse que ademaacutes permite conocer si el sistema terreno funciona correctamente El transmisor de la senda de planeo no transmite ningun coacutedigo de identificacioacuten de manera que se depende de la sentildeal del localizadorLas antenas de los localizadores modernos tienen unos loacutebulos principales muy direccionales pero en el caso de los transmisores maacutes antiguos existen loacutebulos traseros que permiten utilizar el mismo sistema para el aterrizaje en el sentido contrario de la pista (backcourse) Si se usa este mecanismo en lugar de tener dos sistemas ILS uno para cada direccioacuten de aterrizaje el piloto tendraacute que volar en la direccioacuten contraria a la direccioacuten marcada por la aguja ya que la posicioacuten relativa de los loacutebulos modulados a 90 y a 150 Hz ha cambiado
RadiobalizasUna radiobaliza ILS es un transmisor a 75 MHz cuya antena tiene su loacutebulo principal apuntando hacia arribaComo hemos anticipado maacutes arriba hay tres tipos
_ baliza exterior (outer marker OM) que estaacute localizada a 72 km (39 nm) del umbral de la pista emite una sentildeal modulada en un tono de 400 Hz consistente en dos rayas Morse por segundo se puede combinar con un NDB para crear una radiobaliza exterior de localizador (locator outer marker LOM)
_ baliza intermedia (middle marker MM) que estaacute localizada a 11 km (3500 ft) del comienzo de la pista y tiene su sentildeal modulada a 1300 Hz consistente en dos pares raya-punto de coacutedigo Morse cada tres segundos _ baliza interior (inner marker IM) cuando estaacute instalada se localiza para que en condiciones de baja visibilidad se indique que se estaacute a punto de cruzar el umbral de la pista en esta posicioacuten un avioacuten normalmente llega a las condiciones miacutenimas de la Categoriacutea II la modulacioacuten es de a 3000 Hz emitiendo 6 puntos Morse por segundo estaacute situado entre 75 y 450 m delante de la pista 4_ baliza trasera (back marker BM) que estaacute presente en el caso de utilizarse una liacutenea de descenso por pista inversa de backcourse y estaraacute situada a una distancia de entre 7 y 11 km de la pista esta sentildeal estaacute modulada a 400 Hz un NDB o un sistema DME sule sustituir en muchas ocasiones el BM Las sentildeales que recibe el piloto cuando el avioacuten atraviesa esta zona son tanto visuales sobre el control de mandos (luces azul aacutembar y blanca para los OM MM e IM respectivamente) como auditivas seguacuten los tonos de modulacioacuten indicados y las sentildeales Morse correspondienteLos diagramas de radiacioacuten de las antenas transmisoras tienen una anchura de unos 40 grados en la direcciiacuteonde vuelo y de 170 grados en la direccioacuten perperdicular Esta anchura permite al piloto conocer la altura a la que se encuentra sobre el suelo teniendo en cuenta el tiempo que tarda en cruzar el haz y la velocidad del avioacutenComo hemos dicho maacutes arriba en la actualidad las radiobalizas interior e intermedia sobre todo la primera
son raras de encontrar y tambieacuten estaacute decreciendo el uso de la radiobaliza exterior
DME
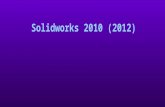
El equipo medidor de distancias DME se integra con el ILS para proporcionar a las aeronaves informacioacuten de distancia al umbral de pista durante las maniobras de aproximacioacuten de precisioacuten El DME no es un subsistema del ILS ya que el elemento del ILS encargado de proporcionar indicacioacuten de distancia son las radiobalizas No obstante y como hemos explicado en el capiacutetulo anterior estas han sido praacutecticamente sustituidas por el DME Desde el punto de vista de funcionamiento el DME presenta una diferencia importante con respecto a lo que hemos visto hasta ahora Asiacute como en el Localizador y en la Senda de Planeo el instrumento de a bordo era un simple elemento pasivo que recibiacutea y decodificaba la sentildeal generada por la instalacioacuten de tierra sin intervenir para nada maacutes en el caso del DME el instrumento de a bordo denominado interrogador transmite sentildeales de interrogacioacuten que tras ser recibidas y retransmitidas por el equipo de tierra denominado transpondedor proporcionaraacuten al interrogador la informacioacuten de distancia El principio teoacuterico de medida de distancia del DME se basa en medir el tiempo transcurrido entre que se transmite una interrogacioacuten y se recibe la respuesta generada en tierra Multiplicando la mitad de este tiempo por la velocidad de propagacioacuten de las sentildeales radioeleacutectricas aproximadamente la velocidad de la luz (300000 Kms) obtenemos la distancia en liacutenea recta entre la aeronave y la estacioacuten DME de tierra Esta distancia denominada distancia oblicua no corresponde a la distancia que separa a la aeronave de la estacioacuten en el plano horizontal pero a distancias grandes es muy aproximada No obstante al acercarse a la vertical de la estacioacuten el error va aumentando y sobre la vertical en el caso de que existiese cobertura la distancia indicada seriacutea igual a la altura En la figura siguiente podemos ver un diagrama de bloques del interrogador y el transpondedor junto con el esquema del principio de medida de distancia Como puede verse las sentildeales de interrogacioacuten y respuesta estaacuten formadas por pares de pulsos gausianos de radiofrecuencia en la banda de 962 a 1214 Mhz Para diferenciar los pulsos de interrogacioacuten de los de respuesta existe una diferencia de 63 Mhz entre la frecuencia del interrogador y la del transpondedor Con todo esto la banda de trabajo del DME estaacute dividida en 126 canales de interrogacioacuten y 126 de respuesta apareados es decir que de forma automaacutetica al seleccionar el canal de la estacioacuten de tierra se selecciona la frecuencia en que hay que interrogarle y en la que se le va a recibir
Dado que son las aeronaves las que transmiten los pulsos de interrogacioacuten puede darse el caso y de hecho se da que lo hagan varias a la vez Estas interrogaciones llegaraacuten al transpondedor que generaraacute y emitiraacute los pulsos de respuesta todos en la misma frecuencia Entonces tenemos un montoacuten de pulsos en el espacio y cada aeronave tiene que encontrar la forma de distinguir los que son respuestas a sus interrogaciones y le serviraacuten para calcular su distancia La forma de distinguirlos consiste en generar los pulsos de interrogacioacuten con una frecuencia de repeticioacuten de pulsos cambiante es decir separando los pares de pulsos por un tiempo aleatorio pero que queda memorizado en el interrogador Al recibir los pulsos de respuesta se van comparando con la secuencia memorizada y cuando coinciden se sabe que son los correspondientes a las interrogaciones propias Entonces solo queda calcular la distancia por el meacutetodo descrito Lo que hemos dicho en el paacuterrafo anterior resuelve el problema para el interrogador pero no para el transpondedor de tierra cuya capacidad de respuestas no es ilimitada Con el fin de aumentar el nuacutemero de aeronaves que pueden obtener informacioacuten de distancia a la vez sin saturar la capacidad del transpondedor se programa a los interrogadores para que hagan su trabajo en dos fases distintas
Funcioacuten ldquoBuacutesquedardquo es la fase inicial cuando se sintoniza una estacioacuten de tierra En ella el nuacutemero de interrogaciones es muy elevado unas 150 por segundo para intentar establecer un valor inicial de la distancia con un error menor de 20 NM Esta fase no duraraacute maacutes de 20 segundos
Funcioacuten ldquoSeguimientordquo una vez que el interrogador a determinado la distancia aproximada a la que se encuentra de la estacioacuten se entra en esta fase en la que el ritmo de interrogaciones desciende hasta unas 25 por segundo Ahora el objetivo es aumentar la precisioacuten con que se conoce la distancia medida y realizar un seguimiento de la aeronave en su desplazamiento
Teniendo en cuenta el nuacutemero maacuteximo de interrogaciones en cada una de las dos fases se establece un nuacutemero maacuteximo total de 100 aeronaves que pueden utilizar una estacioacuten DME de forma simultaacutenea Con estas 100 aeronaves el transpondedor estariacutea transmitiendo 2700 pares de pulsos por segundo Ademaacutes de las respuestas a las interrogaciones recibidas el transpondedor transmite una identificacioacuten formada por tres letras en coacutedigo Morse e ideacutentica a la transmitida por la estacioacuten de informacioacuten acimutal (Localizador o VOR) a la que esteacute asociado Esta identificacioacuten consiste en la transmisioacuten de pares de pulsos a razoacuten de 1350 pares por segundo Los pares de pulsos se transmiten cada aproximadamente 40 segundos Con el fin de optimizar el funcionamiento del transmisor del transpondedor sobre todo de los antiguos que funcionaban a vaacutelvulas este se disentildea para una transmisioacuten continua miacutenima de 700 pares por segundo
excepto durante la transmisioacuten de los pares de pulsos de interrogacioacuten Cuando el nuacutemero de aeronaves estaacute por debajo de este valor miacutenimo el transpondedor genera unos pulsos de relleno llamados ldquosquitterrdquo que sirven para mantener constante el ciclo de trabajo del transmisor Es decir aunque no haya ninguna aeronave interrogaacutendolo el transpondedor siempre estaacute transmitiendo pulsos bien de identificacioacuten o squitter Resumiendo todo lo anterior podemos decir que en el tren continuo de pulsos transmitidos por el transpondedor encontraremos de forma aleatoria respuestas a interrogaciones pares de pulsos de identificacioacuten y pulsos de squitter En caso de que el nuacutemero de aeronaves que estaacuten interrogando a la vez llegase al 90 del valor maacuteximo de 2700 pares por segundo el sistema de supervisioacuten del transpondedor disminuye la sensibilidad del receptor para eliminar las interrogaciones de aeronaves muy distantes que al llegar maacutes deacutebiles se rechazaraacuten en el receptor Llevamos mucho rato hablando de los pares de pulsos sin todaviacutea haber aclarado un poco sus caracteriacutesticas asiacute que vamos a hacerlo ahora Como podemos ver en la figura cada interrogacioacuten y su correspondiente respuesta estaacute formada por una serie de pares de pulsos de radiofrecuencia La duracioacuten de estos pulsos en los puntos de amplitud media es de 35 ms ( 1 microsegundo = 0000001 s) y la separacioacuten entre los dos pulsos del par es de 12 ms tanto en la interrogacioacuten como en la respuesta en el caso de canales X Con el fin de aumentar el nuacutemero de canales dentro de la misma banda de frecuencias OACI establece otros canales denominados canales Y en los cuales la separacioacuten entre pulsos es de 36 ms en la interrogacioacuten y 30 ms en la respuesta La forma del pulso es la de una campana de Gauss Como hemos dicho la separacioacuten entre pares de pulsos se genera de forma aleatoria en el interrogador
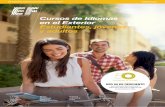
En la siguiente figura podemos ver un diagrama de bloques de la estacioacuten de tierra del DME y estos son sus principales elementos
Fuente de alimentacioacuten se encarga de generar las tensiones necesarias en cada bloque o tarjeta de circuito impreso a partir de la alimentacioacuten en corriente alterna
Antena normalmente estaacute formada por un apilamiento de dipolos verticales y se encarga de recibir las interrogaciones de los aviones y transmitir las respuestas Tiene polarizacioacuten vertical Cuando el DME estaacute asociado con el ILS la antena normalmente suele ser directiva para que solo se tenga cobertura en la zona de aproximacioacuten
Acoplador o circulador se encarga de separar las sentildeales recibidas de las transmitidas ya que como hemos dicho antes la antena es comuacuten
Receptor a partir de la sentildeal de radiofrecuencia obtiene los pulsos de interrogacioacuten como sentildeal detectada
Decodificador comprueba el espaciado de los pulsos para detectar interrogaciones vaacutelidas es decir aquellas en las que dicho espaciado es de 12 ms o 36 ms dependiendo del canal de que se trate Produce un pulso de control que sirve para generar las respuestas Con el fin de evitar responder a pares de pulsos procedentes de interrogaciones reflejadas en objetos u obstaacuteculos naturales y que dariacutean lugar a errores en el interrogador el decodificador produce un bloqueo del receptor durante unos 60 ms una vez que ha detectado una interrogacioacuten vaacutelida
Retardo principal con el fin de homogeneizar el retardo que se produce en los distintos tipos de transpondedores durante la deteccioacuten y generacioacuten de respuestas se introduce un retardo para conseguir que en todos sea igual a 50 ms Este retardo se restaraacute despueacutes en el interrogador a la hora de calcular la distancia En el caso de un DME asociado a un ILS este retardo principal se modifica para que la referencia de distancia cero corresponda con el umbral Si la distancia de la antena del DME al umbral es de 300 m teniendo en cuenta que la velocidad de propagacioacuten de la radiofrecuencia en el aire es de aproximadamente 300000 Kms = 300 mms tendremos que el retardo tendraacute que ser de 48 ms para que el interrogador indique cero en el umbral
Codificador con cada pulso de control genera un par de pulsos con las caracteriacutesticas y espaciado requerido Tambieacuten genera los pulsos correspondientes a la identificacioacuten - Transmisor se encarga de modular la sentildeal portadora con los pulsos proporcionados por el codificador
Sistema de supervisioacuten es el encargado de controlar que la sentildeal radiada y los paraacutemetros del equipo de tierra se encuentran dentro de las tolerancias establecidas Dado que en el DME es necesario comprobar el buen funcionamiento tanto del transmisor como del receptor dentro del sistema de supervisioacuten se generan unas sentildeales de interrogacioacuten de prueba que se inyectan en el camino de recepcioacuten antes del receptor El sistema de supervisioacuten comprueba el correcto tratamiento (recepcioacuten y deteccioacuten) de estas interrogaciones de prueba y determina el estado del canal de recepcioacuten
Unidad de control local con la informacioacuten proporcionada por el sistema de supervisioacuten sobre el estado de las paraacutemetros de la estacioacuten esta unidad establece el funcionamiento del sistema realizando una transferencia de equipo o cesando la radiacioacuten
Unidad de control remoto permite supervisar y controlar la instalacioacuten desde un emplazamiento remoto
Al igual que en la senda de Planeo y en el Localizador todos los elementos descritos a excepcioacuten de la antena y las unidades de control se encuentran duplicados Cuando el DME se utiliza para proporcionar la funcioacuten de distancia del ILS se instala en el mismo emplazamiento que la Senda de Planeo de forma que la antena del DME se encuentre proacutexima al umbral que como hemos dicho seraacute la referencia de distancia cero durante la aproximacioacuten En este caso el indicativo del DME es igual al transmitido por el Localizador y se asocia con este de forma que de cada cuatro sentildeales de indicativo tres sean transmitidas por el Localizador y una por el DME Con el fin de aumentar la precisioacuten para ser utilizado con el Sistema de Aterrizaje por Microondas (MLS Microwave Landing System) OACI ha definido el denominado DME de precisioacuten (DMEP) en el cual se modifica la forma de los pulsos para aumentar la precisioacuten al medir los tiempos entre interrogaciones y respuestas Cuando el DME estaacute instalado junto con un ILS debe proporcionar cobertura desde por lo menos la cobertura del Localizador hasta el umbral en el sector de cobertura acimutal del Localizador En este volumen de cobertura la precisioacuten de la medida de distancia proporcionada por el DME estaraacute comprendida entre 370 m y el 025 de la distancia La informacioacuten de distancia obtenida por el DME se le presenta al piloto en millas naacuteuticas (1 NM = 1852 m) en el propio instrumento DME de a bordo asiacute como en otros instrumentos que combinan varias informaciones y facilitan su lectura al piloto
A continuacioacuten se presenta un diagrama de bloques simplificado del transpondedor DME
Sistema VOR (Very high frequency Omnidirectional Range)
El sistema de radionavegacioacuten VOR (Very High Frequency Omnidirectional Range) es uno de los sistemas de radionavegacioacuten maacutes usados Tambieacuten se han empleado y se emplean otros sistemas como los NDB (Non-Directional Beacons o Radiofaros No Direccionales) que funcionan a frecuencias maacutes baja y proporcionan datos de localizacioacuten menos exactos y maacutes afectados por las interferencias debidas a las tormentas El sistema VOR consta de estaciones en Tierra que transmiten sentildeales a frecuencias entre 108 y 118 MHz (banda VHF) y gracias al equipo receptor instalado en una aeronave permiten trazar carreteras aeacutereas por las que circulan los aviones y que se denominan aeroviacuteas Los sistemas embarcados nos permiten conocer en que direccioacuten o rumbo se encuentran las estaciones de Tierra y lo normal es viajar sobre las trayectorias que unen unos VOR con otros A menudo una estacioacuten VOR incluye un sistema denominado DME (Distance Measurement Equipment) del que hablaremos en otra praacutectica y que permite calcular la distancia que nos separa de la estacioacuten Pero un DME es un complemento al VOR no parte del mismo
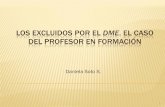
Aspecto de un sistema VOR en el panel de mandos de un avioacutenEn torno a una estacioacuten de tierra VOR dibujamos un medidor de aacutengulos donde el 0 corresponde a la semi recta que comienza en la posicioacuten del VOR y apunta hacia el norte A partir de ahiacute dibujamos los aacutengulos en sentido horario Cada grado define una ruta o calle de modo que tendremos 360 rutas o calles El equipo embarcado en el avioacuten nos diraacute coacutemo de cerca o de lejos estamos de estar orientados hacia el VOR que estamos sintonizando (cada VOR transmite en una
frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

RadiobalizasUna radiobaliza ILS es un transmisor a 75 MHz cuya antena tiene su loacutebulo principal apuntando hacia arribaComo hemos anticipado maacutes arriba hay tres tipos
_ baliza exterior (outer marker OM) que estaacute localizada a 72 km (39 nm) del umbral de la pista emite una sentildeal modulada en un tono de 400 Hz consistente en dos rayas Morse por segundo se puede combinar con un NDB para crear una radiobaliza exterior de localizador (locator outer marker LOM)
_ baliza intermedia (middle marker MM) que estaacute localizada a 11 km (3500 ft) del comienzo de la pista y tiene su sentildeal modulada a 1300 Hz consistente en dos pares raya-punto de coacutedigo Morse cada tres segundos _ baliza interior (inner marker IM) cuando estaacute instalada se localiza para que en condiciones de baja visibilidad se indique que se estaacute a punto de cruzar el umbral de la pista en esta posicioacuten un avioacuten normalmente llega a las condiciones miacutenimas de la Categoriacutea II la modulacioacuten es de a 3000 Hz emitiendo 6 puntos Morse por segundo estaacute situado entre 75 y 450 m delante de la pista 4_ baliza trasera (back marker BM) que estaacute presente en el caso de utilizarse una liacutenea de descenso por pista inversa de backcourse y estaraacute situada a una distancia de entre 7 y 11 km de la pista esta sentildeal estaacute modulada a 400 Hz un NDB o un sistema DME sule sustituir en muchas ocasiones el BM Las sentildeales que recibe el piloto cuando el avioacuten atraviesa esta zona son tanto visuales sobre el control de mandos (luces azul aacutembar y blanca para los OM MM e IM respectivamente) como auditivas seguacuten los tonos de modulacioacuten indicados y las sentildeales Morse correspondienteLos diagramas de radiacioacuten de las antenas transmisoras tienen una anchura de unos 40 grados en la direcciiacuteonde vuelo y de 170 grados en la direccioacuten perperdicular Esta anchura permite al piloto conocer la altura a la que se encuentra sobre el suelo teniendo en cuenta el tiempo que tarda en cruzar el haz y la velocidad del avioacutenComo hemos dicho maacutes arriba en la actualidad las radiobalizas interior e intermedia sobre todo la primera
son raras de encontrar y tambieacuten estaacute decreciendo el uso de la radiobaliza exterior
DME
El equipo medidor de distancias DME se integra con el ILS para proporcionar a las aeronaves informacioacuten de distancia al umbral de pista durante las maniobras de aproximacioacuten de precisioacuten El DME no es un subsistema del ILS ya que el elemento del ILS encargado de proporcionar indicacioacuten de distancia son las radiobalizas No obstante y como hemos explicado en el capiacutetulo anterior estas han sido praacutecticamente sustituidas por el DME Desde el punto de vista de funcionamiento el DME presenta una diferencia importante con respecto a lo que hemos visto hasta ahora Asiacute como en el Localizador y en la Senda de Planeo el instrumento de a bordo era un simple elemento pasivo que recibiacutea y decodificaba la sentildeal generada por la instalacioacuten de tierra sin intervenir para nada maacutes en el caso del DME el instrumento de a bordo denominado interrogador transmite sentildeales de interrogacioacuten que tras ser recibidas y retransmitidas por el equipo de tierra denominado transpondedor proporcionaraacuten al interrogador la informacioacuten de distancia El principio teoacuterico de medida de distancia del DME se basa en medir el tiempo transcurrido entre que se transmite una interrogacioacuten y se recibe la respuesta generada en tierra Multiplicando la mitad de este tiempo por la velocidad de propagacioacuten de las sentildeales radioeleacutectricas aproximadamente la velocidad de la luz (300000 Kms) obtenemos la distancia en liacutenea recta entre la aeronave y la estacioacuten DME de tierra Esta distancia denominada distancia oblicua no corresponde a la distancia que separa a la aeronave de la estacioacuten en el plano horizontal pero a distancias grandes es muy aproximada No obstante al acercarse a la vertical de la estacioacuten el error va aumentando y sobre la vertical en el caso de que existiese cobertura la distancia indicada seriacutea igual a la altura En la figura siguiente podemos ver un diagrama de bloques del interrogador y el transpondedor junto con el esquema del principio de medida de distancia Como puede verse las sentildeales de interrogacioacuten y respuesta estaacuten formadas por pares de pulsos gausianos de radiofrecuencia en la banda de 962 a 1214 Mhz Para diferenciar los pulsos de interrogacioacuten de los de respuesta existe una diferencia de 63 Mhz entre la frecuencia del interrogador y la del transpondedor Con todo esto la banda de trabajo del DME estaacute dividida en 126 canales de interrogacioacuten y 126 de respuesta apareados es decir que de forma automaacutetica al seleccionar el canal de la estacioacuten de tierra se selecciona la frecuencia en que hay que interrogarle y en la que se le va a recibir
Dado que son las aeronaves las que transmiten los pulsos de interrogacioacuten puede darse el caso y de hecho se da que lo hagan varias a la vez Estas interrogaciones llegaraacuten al transpondedor que generaraacute y emitiraacute los pulsos de respuesta todos en la misma frecuencia Entonces tenemos un montoacuten de pulsos en el espacio y cada aeronave tiene que encontrar la forma de distinguir los que son respuestas a sus interrogaciones y le serviraacuten para calcular su distancia La forma de distinguirlos consiste en generar los pulsos de interrogacioacuten con una frecuencia de repeticioacuten de pulsos cambiante es decir separando los pares de pulsos por un tiempo aleatorio pero que queda memorizado en el interrogador Al recibir los pulsos de respuesta se van comparando con la secuencia memorizada y cuando coinciden se sabe que son los correspondientes a las interrogaciones propias Entonces solo queda calcular la distancia por el meacutetodo descrito Lo que hemos dicho en el paacuterrafo anterior resuelve el problema para el interrogador pero no para el transpondedor de tierra cuya capacidad de respuestas no es ilimitada Con el fin de aumentar el nuacutemero de aeronaves que pueden obtener informacioacuten de distancia a la vez sin saturar la capacidad del transpondedor se programa a los interrogadores para que hagan su trabajo en dos fases distintas
Funcioacuten ldquoBuacutesquedardquo es la fase inicial cuando se sintoniza una estacioacuten de tierra En ella el nuacutemero de interrogaciones es muy elevado unas 150 por segundo para intentar establecer un valor inicial de la distancia con un error menor de 20 NM Esta fase no duraraacute maacutes de 20 segundos
Funcioacuten ldquoSeguimientordquo una vez que el interrogador a determinado la distancia aproximada a la que se encuentra de la estacioacuten se entra en esta fase en la que el ritmo de interrogaciones desciende hasta unas 25 por segundo Ahora el objetivo es aumentar la precisioacuten con que se conoce la distancia medida y realizar un seguimiento de la aeronave en su desplazamiento
Teniendo en cuenta el nuacutemero maacuteximo de interrogaciones en cada una de las dos fases se establece un nuacutemero maacuteximo total de 100 aeronaves que pueden utilizar una estacioacuten DME de forma simultaacutenea Con estas 100 aeronaves el transpondedor estariacutea transmitiendo 2700 pares de pulsos por segundo Ademaacutes de las respuestas a las interrogaciones recibidas el transpondedor transmite una identificacioacuten formada por tres letras en coacutedigo Morse e ideacutentica a la transmitida por la estacioacuten de informacioacuten acimutal (Localizador o VOR) a la que esteacute asociado Esta identificacioacuten consiste en la transmisioacuten de pares de pulsos a razoacuten de 1350 pares por segundo Los pares de pulsos se transmiten cada aproximadamente 40 segundos Con el fin de optimizar el funcionamiento del transmisor del transpondedor sobre todo de los antiguos que funcionaban a vaacutelvulas este se disentildea para una transmisioacuten continua miacutenima de 700 pares por segundo
excepto durante la transmisioacuten de los pares de pulsos de interrogacioacuten Cuando el nuacutemero de aeronaves estaacute por debajo de este valor miacutenimo el transpondedor genera unos pulsos de relleno llamados ldquosquitterrdquo que sirven para mantener constante el ciclo de trabajo del transmisor Es decir aunque no haya ninguna aeronave interrogaacutendolo el transpondedor siempre estaacute transmitiendo pulsos bien de identificacioacuten o squitter Resumiendo todo lo anterior podemos decir que en el tren continuo de pulsos transmitidos por el transpondedor encontraremos de forma aleatoria respuestas a interrogaciones pares de pulsos de identificacioacuten y pulsos de squitter En caso de que el nuacutemero de aeronaves que estaacuten interrogando a la vez llegase al 90 del valor maacuteximo de 2700 pares por segundo el sistema de supervisioacuten del transpondedor disminuye la sensibilidad del receptor para eliminar las interrogaciones de aeronaves muy distantes que al llegar maacutes deacutebiles se rechazaraacuten en el receptor Llevamos mucho rato hablando de los pares de pulsos sin todaviacutea haber aclarado un poco sus caracteriacutesticas asiacute que vamos a hacerlo ahora Como podemos ver en la figura cada interrogacioacuten y su correspondiente respuesta estaacute formada por una serie de pares de pulsos de radiofrecuencia La duracioacuten de estos pulsos en los puntos de amplitud media es de 35 ms ( 1 microsegundo = 0000001 s) y la separacioacuten entre los dos pulsos del par es de 12 ms tanto en la interrogacioacuten como en la respuesta en el caso de canales X Con el fin de aumentar el nuacutemero de canales dentro de la misma banda de frecuencias OACI establece otros canales denominados canales Y en los cuales la separacioacuten entre pulsos es de 36 ms en la interrogacioacuten y 30 ms en la respuesta La forma del pulso es la de una campana de Gauss Como hemos dicho la separacioacuten entre pares de pulsos se genera de forma aleatoria en el interrogador
En la siguiente figura podemos ver un diagrama de bloques de la estacioacuten de tierra del DME y estos son sus principales elementos
Fuente de alimentacioacuten se encarga de generar las tensiones necesarias en cada bloque o tarjeta de circuito impreso a partir de la alimentacioacuten en corriente alterna
Antena normalmente estaacute formada por un apilamiento de dipolos verticales y se encarga de recibir las interrogaciones de los aviones y transmitir las respuestas Tiene polarizacioacuten vertical Cuando el DME estaacute asociado con el ILS la antena normalmente suele ser directiva para que solo se tenga cobertura en la zona de aproximacioacuten
Acoplador o circulador se encarga de separar las sentildeales recibidas de las transmitidas ya que como hemos dicho antes la antena es comuacuten
Receptor a partir de la sentildeal de radiofrecuencia obtiene los pulsos de interrogacioacuten como sentildeal detectada
Decodificador comprueba el espaciado de los pulsos para detectar interrogaciones vaacutelidas es decir aquellas en las que dicho espaciado es de 12 ms o 36 ms dependiendo del canal de que se trate Produce un pulso de control que sirve para generar las respuestas Con el fin de evitar responder a pares de pulsos procedentes de interrogaciones reflejadas en objetos u obstaacuteculos naturales y que dariacutean lugar a errores en el interrogador el decodificador produce un bloqueo del receptor durante unos 60 ms una vez que ha detectado una interrogacioacuten vaacutelida
Retardo principal con el fin de homogeneizar el retardo que se produce en los distintos tipos de transpondedores durante la deteccioacuten y generacioacuten de respuestas se introduce un retardo para conseguir que en todos sea igual a 50 ms Este retardo se restaraacute despueacutes en el interrogador a la hora de calcular la distancia En el caso de un DME asociado a un ILS este retardo principal se modifica para que la referencia de distancia cero corresponda con el umbral Si la distancia de la antena del DME al umbral es de 300 m teniendo en cuenta que la velocidad de propagacioacuten de la radiofrecuencia en el aire es de aproximadamente 300000 Kms = 300 mms tendremos que el retardo tendraacute que ser de 48 ms para que el interrogador indique cero en el umbral
Codificador con cada pulso de control genera un par de pulsos con las caracteriacutesticas y espaciado requerido Tambieacuten genera los pulsos correspondientes a la identificacioacuten - Transmisor se encarga de modular la sentildeal portadora con los pulsos proporcionados por el codificador
Sistema de supervisioacuten es el encargado de controlar que la sentildeal radiada y los paraacutemetros del equipo de tierra se encuentran dentro de las tolerancias establecidas Dado que en el DME es necesario comprobar el buen funcionamiento tanto del transmisor como del receptor dentro del sistema de supervisioacuten se generan unas sentildeales de interrogacioacuten de prueba que se inyectan en el camino de recepcioacuten antes del receptor El sistema de supervisioacuten comprueba el correcto tratamiento (recepcioacuten y deteccioacuten) de estas interrogaciones de prueba y determina el estado del canal de recepcioacuten
Unidad de control local con la informacioacuten proporcionada por el sistema de supervisioacuten sobre el estado de las paraacutemetros de la estacioacuten esta unidad establece el funcionamiento del sistema realizando una transferencia de equipo o cesando la radiacioacuten
Unidad de control remoto permite supervisar y controlar la instalacioacuten desde un emplazamiento remoto
Al igual que en la senda de Planeo y en el Localizador todos los elementos descritos a excepcioacuten de la antena y las unidades de control se encuentran duplicados Cuando el DME se utiliza para proporcionar la funcioacuten de distancia del ILS se instala en el mismo emplazamiento que la Senda de Planeo de forma que la antena del DME se encuentre proacutexima al umbral que como hemos dicho seraacute la referencia de distancia cero durante la aproximacioacuten En este caso el indicativo del DME es igual al transmitido por el Localizador y se asocia con este de forma que de cada cuatro sentildeales de indicativo tres sean transmitidas por el Localizador y una por el DME Con el fin de aumentar la precisioacuten para ser utilizado con el Sistema de Aterrizaje por Microondas (MLS Microwave Landing System) OACI ha definido el denominado DME de precisioacuten (DMEP) en el cual se modifica la forma de los pulsos para aumentar la precisioacuten al medir los tiempos entre interrogaciones y respuestas Cuando el DME estaacute instalado junto con un ILS debe proporcionar cobertura desde por lo menos la cobertura del Localizador hasta el umbral en el sector de cobertura acimutal del Localizador En este volumen de cobertura la precisioacuten de la medida de distancia proporcionada por el DME estaraacute comprendida entre 370 m y el 025 de la distancia La informacioacuten de distancia obtenida por el DME se le presenta al piloto en millas naacuteuticas (1 NM = 1852 m) en el propio instrumento DME de a bordo asiacute como en otros instrumentos que combinan varias informaciones y facilitan su lectura al piloto
A continuacioacuten se presenta un diagrama de bloques simplificado del transpondedor DME
Sistema VOR (Very high frequency Omnidirectional Range)
El sistema de radionavegacioacuten VOR (Very High Frequency Omnidirectional Range) es uno de los sistemas de radionavegacioacuten maacutes usados Tambieacuten se han empleado y se emplean otros sistemas como los NDB (Non-Directional Beacons o Radiofaros No Direccionales) que funcionan a frecuencias maacutes baja y proporcionan datos de localizacioacuten menos exactos y maacutes afectados por las interferencias debidas a las tormentas El sistema VOR consta de estaciones en Tierra que transmiten sentildeales a frecuencias entre 108 y 118 MHz (banda VHF) y gracias al equipo receptor instalado en una aeronave permiten trazar carreteras aeacutereas por las que circulan los aviones y que se denominan aeroviacuteas Los sistemas embarcados nos permiten conocer en que direccioacuten o rumbo se encuentran las estaciones de Tierra y lo normal es viajar sobre las trayectorias que unen unos VOR con otros A menudo una estacioacuten VOR incluye un sistema denominado DME (Distance Measurement Equipment) del que hablaremos en otra praacutectica y que permite calcular la distancia que nos separa de la estacioacuten Pero un DME es un complemento al VOR no parte del mismo
Aspecto de un sistema VOR en el panel de mandos de un avioacutenEn torno a una estacioacuten de tierra VOR dibujamos un medidor de aacutengulos donde el 0 corresponde a la semi recta que comienza en la posicioacuten del VOR y apunta hacia el norte A partir de ahiacute dibujamos los aacutengulos en sentido horario Cada grado define una ruta o calle de modo que tendremos 360 rutas o calles El equipo embarcado en el avioacuten nos diraacute coacutemo de cerca o de lejos estamos de estar orientados hacia el VOR que estamos sintonizando (cada VOR transmite en una
frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

son raras de encontrar y tambieacuten estaacute decreciendo el uso de la radiobaliza exterior
DME
El equipo medidor de distancias DME se integra con el ILS para proporcionar a las aeronaves informacioacuten de distancia al umbral de pista durante las maniobras de aproximacioacuten de precisioacuten El DME no es un subsistema del ILS ya que el elemento del ILS encargado de proporcionar indicacioacuten de distancia son las radiobalizas No obstante y como hemos explicado en el capiacutetulo anterior estas han sido praacutecticamente sustituidas por el DME Desde el punto de vista de funcionamiento el DME presenta una diferencia importante con respecto a lo que hemos visto hasta ahora Asiacute como en el Localizador y en la Senda de Planeo el instrumento de a bordo era un simple elemento pasivo que recibiacutea y decodificaba la sentildeal generada por la instalacioacuten de tierra sin intervenir para nada maacutes en el caso del DME el instrumento de a bordo denominado interrogador transmite sentildeales de interrogacioacuten que tras ser recibidas y retransmitidas por el equipo de tierra denominado transpondedor proporcionaraacuten al interrogador la informacioacuten de distancia El principio teoacuterico de medida de distancia del DME se basa en medir el tiempo transcurrido entre que se transmite una interrogacioacuten y se recibe la respuesta generada en tierra Multiplicando la mitad de este tiempo por la velocidad de propagacioacuten de las sentildeales radioeleacutectricas aproximadamente la velocidad de la luz (300000 Kms) obtenemos la distancia en liacutenea recta entre la aeronave y la estacioacuten DME de tierra Esta distancia denominada distancia oblicua no corresponde a la distancia que separa a la aeronave de la estacioacuten en el plano horizontal pero a distancias grandes es muy aproximada No obstante al acercarse a la vertical de la estacioacuten el error va aumentando y sobre la vertical en el caso de que existiese cobertura la distancia indicada seriacutea igual a la altura En la figura siguiente podemos ver un diagrama de bloques del interrogador y el transpondedor junto con el esquema del principio de medida de distancia Como puede verse las sentildeales de interrogacioacuten y respuesta estaacuten formadas por pares de pulsos gausianos de radiofrecuencia en la banda de 962 a 1214 Mhz Para diferenciar los pulsos de interrogacioacuten de los de respuesta existe una diferencia de 63 Mhz entre la frecuencia del interrogador y la del transpondedor Con todo esto la banda de trabajo del DME estaacute dividida en 126 canales de interrogacioacuten y 126 de respuesta apareados es decir que de forma automaacutetica al seleccionar el canal de la estacioacuten de tierra se selecciona la frecuencia en que hay que interrogarle y en la que se le va a recibir
Dado que son las aeronaves las que transmiten los pulsos de interrogacioacuten puede darse el caso y de hecho se da que lo hagan varias a la vez Estas interrogaciones llegaraacuten al transpondedor que generaraacute y emitiraacute los pulsos de respuesta todos en la misma frecuencia Entonces tenemos un montoacuten de pulsos en el espacio y cada aeronave tiene que encontrar la forma de distinguir los que son respuestas a sus interrogaciones y le serviraacuten para calcular su distancia La forma de distinguirlos consiste en generar los pulsos de interrogacioacuten con una frecuencia de repeticioacuten de pulsos cambiante es decir separando los pares de pulsos por un tiempo aleatorio pero que queda memorizado en el interrogador Al recibir los pulsos de respuesta se van comparando con la secuencia memorizada y cuando coinciden se sabe que son los correspondientes a las interrogaciones propias Entonces solo queda calcular la distancia por el meacutetodo descrito Lo que hemos dicho en el paacuterrafo anterior resuelve el problema para el interrogador pero no para el transpondedor de tierra cuya capacidad de respuestas no es ilimitada Con el fin de aumentar el nuacutemero de aeronaves que pueden obtener informacioacuten de distancia a la vez sin saturar la capacidad del transpondedor se programa a los interrogadores para que hagan su trabajo en dos fases distintas
Funcioacuten ldquoBuacutesquedardquo es la fase inicial cuando se sintoniza una estacioacuten de tierra En ella el nuacutemero de interrogaciones es muy elevado unas 150 por segundo para intentar establecer un valor inicial de la distancia con un error menor de 20 NM Esta fase no duraraacute maacutes de 20 segundos
Funcioacuten ldquoSeguimientordquo una vez que el interrogador a determinado la distancia aproximada a la que se encuentra de la estacioacuten se entra en esta fase en la que el ritmo de interrogaciones desciende hasta unas 25 por segundo Ahora el objetivo es aumentar la precisioacuten con que se conoce la distancia medida y realizar un seguimiento de la aeronave en su desplazamiento
Teniendo en cuenta el nuacutemero maacuteximo de interrogaciones en cada una de las dos fases se establece un nuacutemero maacuteximo total de 100 aeronaves que pueden utilizar una estacioacuten DME de forma simultaacutenea Con estas 100 aeronaves el transpondedor estariacutea transmitiendo 2700 pares de pulsos por segundo Ademaacutes de las respuestas a las interrogaciones recibidas el transpondedor transmite una identificacioacuten formada por tres letras en coacutedigo Morse e ideacutentica a la transmitida por la estacioacuten de informacioacuten acimutal (Localizador o VOR) a la que esteacute asociado Esta identificacioacuten consiste en la transmisioacuten de pares de pulsos a razoacuten de 1350 pares por segundo Los pares de pulsos se transmiten cada aproximadamente 40 segundos Con el fin de optimizar el funcionamiento del transmisor del transpondedor sobre todo de los antiguos que funcionaban a vaacutelvulas este se disentildea para una transmisioacuten continua miacutenima de 700 pares por segundo
excepto durante la transmisioacuten de los pares de pulsos de interrogacioacuten Cuando el nuacutemero de aeronaves estaacute por debajo de este valor miacutenimo el transpondedor genera unos pulsos de relleno llamados ldquosquitterrdquo que sirven para mantener constante el ciclo de trabajo del transmisor Es decir aunque no haya ninguna aeronave interrogaacutendolo el transpondedor siempre estaacute transmitiendo pulsos bien de identificacioacuten o squitter Resumiendo todo lo anterior podemos decir que en el tren continuo de pulsos transmitidos por el transpondedor encontraremos de forma aleatoria respuestas a interrogaciones pares de pulsos de identificacioacuten y pulsos de squitter En caso de que el nuacutemero de aeronaves que estaacuten interrogando a la vez llegase al 90 del valor maacuteximo de 2700 pares por segundo el sistema de supervisioacuten del transpondedor disminuye la sensibilidad del receptor para eliminar las interrogaciones de aeronaves muy distantes que al llegar maacutes deacutebiles se rechazaraacuten en el receptor Llevamos mucho rato hablando de los pares de pulsos sin todaviacutea haber aclarado un poco sus caracteriacutesticas asiacute que vamos a hacerlo ahora Como podemos ver en la figura cada interrogacioacuten y su correspondiente respuesta estaacute formada por una serie de pares de pulsos de radiofrecuencia La duracioacuten de estos pulsos en los puntos de amplitud media es de 35 ms ( 1 microsegundo = 0000001 s) y la separacioacuten entre los dos pulsos del par es de 12 ms tanto en la interrogacioacuten como en la respuesta en el caso de canales X Con el fin de aumentar el nuacutemero de canales dentro de la misma banda de frecuencias OACI establece otros canales denominados canales Y en los cuales la separacioacuten entre pulsos es de 36 ms en la interrogacioacuten y 30 ms en la respuesta La forma del pulso es la de una campana de Gauss Como hemos dicho la separacioacuten entre pares de pulsos se genera de forma aleatoria en el interrogador
En la siguiente figura podemos ver un diagrama de bloques de la estacioacuten de tierra del DME y estos son sus principales elementos
Fuente de alimentacioacuten se encarga de generar las tensiones necesarias en cada bloque o tarjeta de circuito impreso a partir de la alimentacioacuten en corriente alterna
Antena normalmente estaacute formada por un apilamiento de dipolos verticales y se encarga de recibir las interrogaciones de los aviones y transmitir las respuestas Tiene polarizacioacuten vertical Cuando el DME estaacute asociado con el ILS la antena normalmente suele ser directiva para que solo se tenga cobertura en la zona de aproximacioacuten
Acoplador o circulador se encarga de separar las sentildeales recibidas de las transmitidas ya que como hemos dicho antes la antena es comuacuten
Receptor a partir de la sentildeal de radiofrecuencia obtiene los pulsos de interrogacioacuten como sentildeal detectada
Decodificador comprueba el espaciado de los pulsos para detectar interrogaciones vaacutelidas es decir aquellas en las que dicho espaciado es de 12 ms o 36 ms dependiendo del canal de que se trate Produce un pulso de control que sirve para generar las respuestas Con el fin de evitar responder a pares de pulsos procedentes de interrogaciones reflejadas en objetos u obstaacuteculos naturales y que dariacutean lugar a errores en el interrogador el decodificador produce un bloqueo del receptor durante unos 60 ms una vez que ha detectado una interrogacioacuten vaacutelida
Retardo principal con el fin de homogeneizar el retardo que se produce en los distintos tipos de transpondedores durante la deteccioacuten y generacioacuten de respuestas se introduce un retardo para conseguir que en todos sea igual a 50 ms Este retardo se restaraacute despueacutes en el interrogador a la hora de calcular la distancia En el caso de un DME asociado a un ILS este retardo principal se modifica para que la referencia de distancia cero corresponda con el umbral Si la distancia de la antena del DME al umbral es de 300 m teniendo en cuenta que la velocidad de propagacioacuten de la radiofrecuencia en el aire es de aproximadamente 300000 Kms = 300 mms tendremos que el retardo tendraacute que ser de 48 ms para que el interrogador indique cero en el umbral
Codificador con cada pulso de control genera un par de pulsos con las caracteriacutesticas y espaciado requerido Tambieacuten genera los pulsos correspondientes a la identificacioacuten - Transmisor se encarga de modular la sentildeal portadora con los pulsos proporcionados por el codificador
Sistema de supervisioacuten es el encargado de controlar que la sentildeal radiada y los paraacutemetros del equipo de tierra se encuentran dentro de las tolerancias establecidas Dado que en el DME es necesario comprobar el buen funcionamiento tanto del transmisor como del receptor dentro del sistema de supervisioacuten se generan unas sentildeales de interrogacioacuten de prueba que se inyectan en el camino de recepcioacuten antes del receptor El sistema de supervisioacuten comprueba el correcto tratamiento (recepcioacuten y deteccioacuten) de estas interrogaciones de prueba y determina el estado del canal de recepcioacuten
Unidad de control local con la informacioacuten proporcionada por el sistema de supervisioacuten sobre el estado de las paraacutemetros de la estacioacuten esta unidad establece el funcionamiento del sistema realizando una transferencia de equipo o cesando la radiacioacuten
Unidad de control remoto permite supervisar y controlar la instalacioacuten desde un emplazamiento remoto
Al igual que en la senda de Planeo y en el Localizador todos los elementos descritos a excepcioacuten de la antena y las unidades de control se encuentran duplicados Cuando el DME se utiliza para proporcionar la funcioacuten de distancia del ILS se instala en el mismo emplazamiento que la Senda de Planeo de forma que la antena del DME se encuentre proacutexima al umbral que como hemos dicho seraacute la referencia de distancia cero durante la aproximacioacuten En este caso el indicativo del DME es igual al transmitido por el Localizador y se asocia con este de forma que de cada cuatro sentildeales de indicativo tres sean transmitidas por el Localizador y una por el DME Con el fin de aumentar la precisioacuten para ser utilizado con el Sistema de Aterrizaje por Microondas (MLS Microwave Landing System) OACI ha definido el denominado DME de precisioacuten (DMEP) en el cual se modifica la forma de los pulsos para aumentar la precisioacuten al medir los tiempos entre interrogaciones y respuestas Cuando el DME estaacute instalado junto con un ILS debe proporcionar cobertura desde por lo menos la cobertura del Localizador hasta el umbral en el sector de cobertura acimutal del Localizador En este volumen de cobertura la precisioacuten de la medida de distancia proporcionada por el DME estaraacute comprendida entre 370 m y el 025 de la distancia La informacioacuten de distancia obtenida por el DME se le presenta al piloto en millas naacuteuticas (1 NM = 1852 m) en el propio instrumento DME de a bordo asiacute como en otros instrumentos que combinan varias informaciones y facilitan su lectura al piloto
A continuacioacuten se presenta un diagrama de bloques simplificado del transpondedor DME
Sistema VOR (Very high frequency Omnidirectional Range)
El sistema de radionavegacioacuten VOR (Very High Frequency Omnidirectional Range) es uno de los sistemas de radionavegacioacuten maacutes usados Tambieacuten se han empleado y se emplean otros sistemas como los NDB (Non-Directional Beacons o Radiofaros No Direccionales) que funcionan a frecuencias maacutes baja y proporcionan datos de localizacioacuten menos exactos y maacutes afectados por las interferencias debidas a las tormentas El sistema VOR consta de estaciones en Tierra que transmiten sentildeales a frecuencias entre 108 y 118 MHz (banda VHF) y gracias al equipo receptor instalado en una aeronave permiten trazar carreteras aeacutereas por las que circulan los aviones y que se denominan aeroviacuteas Los sistemas embarcados nos permiten conocer en que direccioacuten o rumbo se encuentran las estaciones de Tierra y lo normal es viajar sobre las trayectorias que unen unos VOR con otros A menudo una estacioacuten VOR incluye un sistema denominado DME (Distance Measurement Equipment) del que hablaremos en otra praacutectica y que permite calcular la distancia que nos separa de la estacioacuten Pero un DME es un complemento al VOR no parte del mismo
Aspecto de un sistema VOR en el panel de mandos de un avioacutenEn torno a una estacioacuten de tierra VOR dibujamos un medidor de aacutengulos donde el 0 corresponde a la semi recta que comienza en la posicioacuten del VOR y apunta hacia el norte A partir de ahiacute dibujamos los aacutengulos en sentido horario Cada grado define una ruta o calle de modo que tendremos 360 rutas o calles El equipo embarcado en el avioacuten nos diraacute coacutemo de cerca o de lejos estamos de estar orientados hacia el VOR que estamos sintonizando (cada VOR transmite en una
frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

excepto durante la transmisioacuten de los pares de pulsos de interrogacioacuten Cuando el nuacutemero de aeronaves estaacute por debajo de este valor miacutenimo el transpondedor genera unos pulsos de relleno llamados ldquosquitterrdquo que sirven para mantener constante el ciclo de trabajo del transmisor Es decir aunque no haya ninguna aeronave interrogaacutendolo el transpondedor siempre estaacute transmitiendo pulsos bien de identificacioacuten o squitter Resumiendo todo lo anterior podemos decir que en el tren continuo de pulsos transmitidos por el transpondedor encontraremos de forma aleatoria respuestas a interrogaciones pares de pulsos de identificacioacuten y pulsos de squitter En caso de que el nuacutemero de aeronaves que estaacuten interrogando a la vez llegase al 90 del valor maacuteximo de 2700 pares por segundo el sistema de supervisioacuten del transpondedor disminuye la sensibilidad del receptor para eliminar las interrogaciones de aeronaves muy distantes que al llegar maacutes deacutebiles se rechazaraacuten en el receptor Llevamos mucho rato hablando de los pares de pulsos sin todaviacutea haber aclarado un poco sus caracteriacutesticas asiacute que vamos a hacerlo ahora Como podemos ver en la figura cada interrogacioacuten y su correspondiente respuesta estaacute formada por una serie de pares de pulsos de radiofrecuencia La duracioacuten de estos pulsos en los puntos de amplitud media es de 35 ms ( 1 microsegundo = 0000001 s) y la separacioacuten entre los dos pulsos del par es de 12 ms tanto en la interrogacioacuten como en la respuesta en el caso de canales X Con el fin de aumentar el nuacutemero de canales dentro de la misma banda de frecuencias OACI establece otros canales denominados canales Y en los cuales la separacioacuten entre pulsos es de 36 ms en la interrogacioacuten y 30 ms en la respuesta La forma del pulso es la de una campana de Gauss Como hemos dicho la separacioacuten entre pares de pulsos se genera de forma aleatoria en el interrogador
En la siguiente figura podemos ver un diagrama de bloques de la estacioacuten de tierra del DME y estos son sus principales elementos
Fuente de alimentacioacuten se encarga de generar las tensiones necesarias en cada bloque o tarjeta de circuito impreso a partir de la alimentacioacuten en corriente alterna
Antena normalmente estaacute formada por un apilamiento de dipolos verticales y se encarga de recibir las interrogaciones de los aviones y transmitir las respuestas Tiene polarizacioacuten vertical Cuando el DME estaacute asociado con el ILS la antena normalmente suele ser directiva para que solo se tenga cobertura en la zona de aproximacioacuten
Acoplador o circulador se encarga de separar las sentildeales recibidas de las transmitidas ya que como hemos dicho antes la antena es comuacuten
Receptor a partir de la sentildeal de radiofrecuencia obtiene los pulsos de interrogacioacuten como sentildeal detectada
Decodificador comprueba el espaciado de los pulsos para detectar interrogaciones vaacutelidas es decir aquellas en las que dicho espaciado es de 12 ms o 36 ms dependiendo del canal de que se trate Produce un pulso de control que sirve para generar las respuestas Con el fin de evitar responder a pares de pulsos procedentes de interrogaciones reflejadas en objetos u obstaacuteculos naturales y que dariacutean lugar a errores en el interrogador el decodificador produce un bloqueo del receptor durante unos 60 ms una vez que ha detectado una interrogacioacuten vaacutelida
Retardo principal con el fin de homogeneizar el retardo que se produce en los distintos tipos de transpondedores durante la deteccioacuten y generacioacuten de respuestas se introduce un retardo para conseguir que en todos sea igual a 50 ms Este retardo se restaraacute despueacutes en el interrogador a la hora de calcular la distancia En el caso de un DME asociado a un ILS este retardo principal se modifica para que la referencia de distancia cero corresponda con el umbral Si la distancia de la antena del DME al umbral es de 300 m teniendo en cuenta que la velocidad de propagacioacuten de la radiofrecuencia en el aire es de aproximadamente 300000 Kms = 300 mms tendremos que el retardo tendraacute que ser de 48 ms para que el interrogador indique cero en el umbral
Codificador con cada pulso de control genera un par de pulsos con las caracteriacutesticas y espaciado requerido Tambieacuten genera los pulsos correspondientes a la identificacioacuten - Transmisor se encarga de modular la sentildeal portadora con los pulsos proporcionados por el codificador
Sistema de supervisioacuten es el encargado de controlar que la sentildeal radiada y los paraacutemetros del equipo de tierra se encuentran dentro de las tolerancias establecidas Dado que en el DME es necesario comprobar el buen funcionamiento tanto del transmisor como del receptor dentro del sistema de supervisioacuten se generan unas sentildeales de interrogacioacuten de prueba que se inyectan en el camino de recepcioacuten antes del receptor El sistema de supervisioacuten comprueba el correcto tratamiento (recepcioacuten y deteccioacuten) de estas interrogaciones de prueba y determina el estado del canal de recepcioacuten
Unidad de control local con la informacioacuten proporcionada por el sistema de supervisioacuten sobre el estado de las paraacutemetros de la estacioacuten esta unidad establece el funcionamiento del sistema realizando una transferencia de equipo o cesando la radiacioacuten
Unidad de control remoto permite supervisar y controlar la instalacioacuten desde un emplazamiento remoto
Al igual que en la senda de Planeo y en el Localizador todos los elementos descritos a excepcioacuten de la antena y las unidades de control se encuentran duplicados Cuando el DME se utiliza para proporcionar la funcioacuten de distancia del ILS se instala en el mismo emplazamiento que la Senda de Planeo de forma que la antena del DME se encuentre proacutexima al umbral que como hemos dicho seraacute la referencia de distancia cero durante la aproximacioacuten En este caso el indicativo del DME es igual al transmitido por el Localizador y se asocia con este de forma que de cada cuatro sentildeales de indicativo tres sean transmitidas por el Localizador y una por el DME Con el fin de aumentar la precisioacuten para ser utilizado con el Sistema de Aterrizaje por Microondas (MLS Microwave Landing System) OACI ha definido el denominado DME de precisioacuten (DMEP) en el cual se modifica la forma de los pulsos para aumentar la precisioacuten al medir los tiempos entre interrogaciones y respuestas Cuando el DME estaacute instalado junto con un ILS debe proporcionar cobertura desde por lo menos la cobertura del Localizador hasta el umbral en el sector de cobertura acimutal del Localizador En este volumen de cobertura la precisioacuten de la medida de distancia proporcionada por el DME estaraacute comprendida entre 370 m y el 025 de la distancia La informacioacuten de distancia obtenida por el DME se le presenta al piloto en millas naacuteuticas (1 NM = 1852 m) en el propio instrumento DME de a bordo asiacute como en otros instrumentos que combinan varias informaciones y facilitan su lectura al piloto
A continuacioacuten se presenta un diagrama de bloques simplificado del transpondedor DME
Sistema VOR (Very high frequency Omnidirectional Range)
El sistema de radionavegacioacuten VOR (Very High Frequency Omnidirectional Range) es uno de los sistemas de radionavegacioacuten maacutes usados Tambieacuten se han empleado y se emplean otros sistemas como los NDB (Non-Directional Beacons o Radiofaros No Direccionales) que funcionan a frecuencias maacutes baja y proporcionan datos de localizacioacuten menos exactos y maacutes afectados por las interferencias debidas a las tormentas El sistema VOR consta de estaciones en Tierra que transmiten sentildeales a frecuencias entre 108 y 118 MHz (banda VHF) y gracias al equipo receptor instalado en una aeronave permiten trazar carreteras aeacutereas por las que circulan los aviones y que se denominan aeroviacuteas Los sistemas embarcados nos permiten conocer en que direccioacuten o rumbo se encuentran las estaciones de Tierra y lo normal es viajar sobre las trayectorias que unen unos VOR con otros A menudo una estacioacuten VOR incluye un sistema denominado DME (Distance Measurement Equipment) del que hablaremos en otra praacutectica y que permite calcular la distancia que nos separa de la estacioacuten Pero un DME es un complemento al VOR no parte del mismo
Aspecto de un sistema VOR en el panel de mandos de un avioacutenEn torno a una estacioacuten de tierra VOR dibujamos un medidor de aacutengulos donde el 0 corresponde a la semi recta que comienza en la posicioacuten del VOR y apunta hacia el norte A partir de ahiacute dibujamos los aacutengulos en sentido horario Cada grado define una ruta o calle de modo que tendremos 360 rutas o calles El equipo embarcado en el avioacuten nos diraacute coacutemo de cerca o de lejos estamos de estar orientados hacia el VOR que estamos sintonizando (cada VOR transmite en una
frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

Unidad de control local con la informacioacuten proporcionada por el sistema de supervisioacuten sobre el estado de las paraacutemetros de la estacioacuten esta unidad establece el funcionamiento del sistema realizando una transferencia de equipo o cesando la radiacioacuten
Unidad de control remoto permite supervisar y controlar la instalacioacuten desde un emplazamiento remoto
Al igual que en la senda de Planeo y en el Localizador todos los elementos descritos a excepcioacuten de la antena y las unidades de control se encuentran duplicados Cuando el DME se utiliza para proporcionar la funcioacuten de distancia del ILS se instala en el mismo emplazamiento que la Senda de Planeo de forma que la antena del DME se encuentre proacutexima al umbral que como hemos dicho seraacute la referencia de distancia cero durante la aproximacioacuten En este caso el indicativo del DME es igual al transmitido por el Localizador y se asocia con este de forma que de cada cuatro sentildeales de indicativo tres sean transmitidas por el Localizador y una por el DME Con el fin de aumentar la precisioacuten para ser utilizado con el Sistema de Aterrizaje por Microondas (MLS Microwave Landing System) OACI ha definido el denominado DME de precisioacuten (DMEP) en el cual se modifica la forma de los pulsos para aumentar la precisioacuten al medir los tiempos entre interrogaciones y respuestas Cuando el DME estaacute instalado junto con un ILS debe proporcionar cobertura desde por lo menos la cobertura del Localizador hasta el umbral en el sector de cobertura acimutal del Localizador En este volumen de cobertura la precisioacuten de la medida de distancia proporcionada por el DME estaraacute comprendida entre 370 m y el 025 de la distancia La informacioacuten de distancia obtenida por el DME se le presenta al piloto en millas naacuteuticas (1 NM = 1852 m) en el propio instrumento DME de a bordo asiacute como en otros instrumentos que combinan varias informaciones y facilitan su lectura al piloto
A continuacioacuten se presenta un diagrama de bloques simplificado del transpondedor DME
Sistema VOR (Very high frequency Omnidirectional Range)
El sistema de radionavegacioacuten VOR (Very High Frequency Omnidirectional Range) es uno de los sistemas de radionavegacioacuten maacutes usados Tambieacuten se han empleado y se emplean otros sistemas como los NDB (Non-Directional Beacons o Radiofaros No Direccionales) que funcionan a frecuencias maacutes baja y proporcionan datos de localizacioacuten menos exactos y maacutes afectados por las interferencias debidas a las tormentas El sistema VOR consta de estaciones en Tierra que transmiten sentildeales a frecuencias entre 108 y 118 MHz (banda VHF) y gracias al equipo receptor instalado en una aeronave permiten trazar carreteras aeacutereas por las que circulan los aviones y que se denominan aeroviacuteas Los sistemas embarcados nos permiten conocer en que direccioacuten o rumbo se encuentran las estaciones de Tierra y lo normal es viajar sobre las trayectorias que unen unos VOR con otros A menudo una estacioacuten VOR incluye un sistema denominado DME (Distance Measurement Equipment) del que hablaremos en otra praacutectica y que permite calcular la distancia que nos separa de la estacioacuten Pero un DME es un complemento al VOR no parte del mismo
Aspecto de un sistema VOR en el panel de mandos de un avioacutenEn torno a una estacioacuten de tierra VOR dibujamos un medidor de aacutengulos donde el 0 corresponde a la semi recta que comienza en la posicioacuten del VOR y apunta hacia el norte A partir de ahiacute dibujamos los aacutengulos en sentido horario Cada grado define una ruta o calle de modo que tendremos 360 rutas o calles El equipo embarcado en el avioacuten nos diraacute coacutemo de cerca o de lejos estamos de estar orientados hacia el VOR que estamos sintonizando (cada VOR transmite en una
frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

frecuencia caracteriacutestica como luego detallaremos de modo que la idea es conectarse a uno en concreto el maacutes cercano o aquel que queremos utilizar como referencia) seguacuten una cierta calle Asiacute el indicador en el panel del avioacuten incluye
_ un indicador denominado OBI (OmniBearing Indicator) que nos permite elegir la calle que queremosutilizar como referencia Podemos modificar su valor haciendo click sobre eacutel en nuestro simuladoronline En nuestro simulador aparece como OBS (OmniBearing Selector)
_ el CDI (Course Deviation Indicator) que es la aguja que tiene una posicioacuten inclinada a un lado u otrode la vertical nos da una idea de coacutemo de desviados estamos de la calle en un rango de _10 gradossi aparece inclinada de arriba a abajo y a la izquierda significa que debemos girar hacia la izquierday anaacutelogamente para la derecha siempre y cuando estemos orientados hacia el VOR y al reveacutes si lotenemos de espaldas (volveremos a esto en un momento)_ un indicador que nos dice si el aacutengulo que marca la calle seleccionada en el OBI estaacute medido desde(FROM) o hacia (TO) el VOREs inmediato darse cuenta de que la medida proporcionada por el VOR no proporciona el sentido de mirahacia el VOR o desde eacutel El indicador FROMTO lo que me dice es si cuando fijo una calle en el OBI estoyen un lado o en otro del VOR pero no me dice en queacute direccioacuten estaacute mirando el morro de mi avioacuten Esto esimportante a la hora de leer el CDI si estoy mirando hacia el VOR y el CDI se encuentra a la izquierda de lavertical debo girar a la izquierda para situarme sobre la calle indicada en el OBI momento en el cual el CDIse encuentra vertical y a la derecha si el CDI estaacute a la derecha Sin embargo si tengo al VOR de espaldashabreacute de girar a la derecha en el primer caso y a la izquierda en el segundo Es conveniente pues averiguarcon la ayuda de la bruacutejula o del HSI (HI en nuestro simulador) -por Horizontal Situation Indicator- esteparticular y cambiar en 180 grados el OBI si estoy mirando de espaldas al VOR de modo que cambiareacute deFROM a TO o al reveacutes y mirareacute de frente al VOR de modo que el CDI me sea maacutes intuitivo Descriacutebasecoacutemo averiguar el sentido de mira hacia el VOR con ayuda del HI La orientacioacuten se denominateacutecnicamente QDM o INBOUND si miramos de frente al VOR y QDR o OUTBOUND en caso de mirarlode espaldasDebido a que puede haber estaciones VOR relativamente cercanas entre siacute y con miacutenimas diferencias entresus frecuencias puede darse el caso de sintonizar una frecuencia erroacutenea y viajar hacia un VOR equivocadoComo enseguida veremos los VOR se identifican ademaacutes de por su frecuencia por un coacutedigo Morse detres letras No obstante los sistemas VOR se encuentran normalmente duplicados y se suelen utilizar parasintonizar dos VOR diferentes y protegerse contra inconsistenciasHay tres tipos de estaciones VOR de tierra H (112-118 MHz) L (112-118 MHz) y T (108-112 MHz) quese diferencian en que los dos primeros tienen un alcance de unas 120 millas naacuteuticas mientras que los Tsolamente llegan a las 55 millas Los nombres se deben a T por Terminal L por Low altitude y H por Highaltitude Ya hemos dicho que en muchos casos tenemos un sistema DME colocado con el VOR que nos proporcionaraacuteinformacioacuten de queacute distancia nos separa de la estacioacuten lo que nos ayudaraacute a saber sobre queacute punto dela radial o calle nos encontramos Si no contaacutesemos con una medida DME nos apoyariacuteamos en el caacutelculode la interseccioacuten de las dos LOPs marcadas por las medidas con respecto a dos VOR que como hemosdicho estaacuten disponibles en nuestra cabina A la hora de seguir nuestra ruta hay que tener tambieacuten encuenta aspectos como que el morro del avioacuten puede no estar apuntando en la direccioacuten de movimientoen determinadas condiciones del viento o que la trayectoria sobre el suelo o derrota no es trivial dada latrayectoria aeacuterea porque la Tierra rota bajo el avioacuten Sin embargo no entramos en detalles de navegacioacutenaquiacute que sean demasiados ajenos a nuestros sistemas de radio En este sentido siacute sentildealamos algo que nohemos mencionado cuando volamos por encima de la zona que separa el FROM del TO normalmenteperdemos contacto con la estacioacuten VOR debido a la conformacioacuten de los diagramas de radiacioacuten que noson completamente omnidireccionales y no ldquopierdenrdquo energiacutea radiando hacia arriba o hacia el suelo En esemomento en lugar de FROM o TO el indicador de la cabina marca OFF
Anaacutelisis del sistema VOR desde el punto de vista de radio
El sistema VOR opera en diversos canales en la banda 108-11795 MHz dejando 50 Hz de separacioacutenentre canal y canal A estas frecuencias las distorsiones atmosfeacutericas son praacutecticamente despreciables Las caracteriacutesticas de propagacioacuten por otro lado requiren que se ha de tener el radiofaro dentro de la liacutenea visual ya que la onda de superficie es demasiado deacutebil La potencia transmitida es de unos 200W en cada estacioacuten Como hemos dicho el sistema
VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

VOR indica la direccioacuten del avioacuten al transmisor definiendo asiacute la liacutenea de posicioacuten (LOP) o radial La interseccioacuten de dos radiales da una posicioacuten o fix igualmente que podemos conseguirlo mediante una medida combinada de las medidas de un VOR y un DMELa antena transmisora VOR convencional tiene un diagrama de radiacioacuten compuesto que consiste de unaparte no direccional maacutes dos componentes con forma de ocho que resultan en un diagrama con forma decardioide La polarizacioacuten es horizontal El cardioide resultante rota electroacutenicamente a una velocidadangular de 30 vueltas por segundo (30 Hz) lo que se consigue sumando dos componentes en forma de ochoque tienen un desfase relativo de 90o entre siacute con una modulacioacuten en amplitud a 30 Hz Un receptorcolocado en una direccioacuten recibe una sentildeal dependiente de la direccioacuten que tras ser demodulada es una
funcioacuten lineal Se transmite adicionalmente otra sentildeal a traveacutes de la antena no direccional Se trata de una sentildeal AM desubportadora fu a 9960 Hz que a su vez estaacute modulada en frecuencia a 30 Hz El iacutendice de modulacioacuten FM_ es 16 y la profundidad de modulacioacuten AM es b = 03 Ademaacutes la sentildeal estaacute modulada en amplitud porun coacutedigo Morse f(t) a fi = 1020 HzvVOR = coswct[1 + a cos(wmt 1048576 _) + b cos(wut + _ coswmt) + f(t) coswit] (2)El objetivo de la sentildeal modulada en frecuencia es proporcionar una referencia sobre la que medir la _Para entender esto es necesario contemplar la ecuacioacuten (1) como una ecuacioacuten en la que hemos obviado ladependencia espacial de la onda es decir donde hemos obviado un teacutermino de fase que se antildeada a la _ y queimposibilita su conocimiento a menos que se cuente con otra sentildeal de referencia con la misma componentefase en espacio (la conocida como ~k _~r donde ~k es el vector de onda y ~r la posicioacuten) Esto es precisamente loque proporciona la componente omnidireccional modulada en frecuencia Analiacutecense las ecuaciones (1)
Receptores VORLa fase de la FM se ha seleccionado de tal manera que la modulacioacuten estaacute en fase con la rotacioacuten de 30 Hzen todo instante cuando el cardioide apunta al norte (_ = 0) de tal manera que la medida de la diferenciade fase entre dos sentildeales demoduladas a 30 Hz da una direccioacuten no ambigua Sin la sentildeal omnidireccionalno tendriacuteamos una referencia para medir la _
ExactitudLa reglamentacioacuten actual establece que la exactitud del Receptor debe de ser de 04 grados con una fidelidaddel 95 La exactitud absoluta del sistema VOR es aproxima- damente de 140 Sin embargo los tests decalidad indican que con un grado de fidelidad del 9994 el sistema VOR tiene un error inferior a _035oRealiacutecese una simulacioacuten con Simulink de la sentildeal VOR descrita en (2) Para ello es necesariorealizar previamente el tutorial sobre Simulink que se incluye en el Apeacutendice
VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5

VOR DopplerEl VOR explicado arriba se denomina VOR convencional o CVOR Frente a eacutel tenemos el VOR Doppler oDVOR Veamos cuacuteales son las ventajas del segundoEl multicamino o multipath es la principal fuente de error de los sistemas VOR Una manera de corregirloes usar antenas de mayor tamantildeo maacutes direccionales por tanto y otra es utilizar el hecho de que las sentildealesFM son menos sensibles a las reflexiones que las AM de manera que seriacutea bueno sustituir la componenteFM por una AM Esto uacuteltimo seriacutea un problema planteado en esos simples teacuterminos ya que entonces nopodriacuteamos separar faacutecilmente ambos componentes AM que van sobre la misma portadoraSin embargo existe una manera de emplear ambas mejoras simultaacuteneamente si simulamos la componenteFM a traveacutes de la generacioacuten de un Doppler Y decimos que tambieacuten podemos acompantildear esta medidacon el uso de una antena maacutes grande porque vamos a utilizar una agrupacioacuten de antenas colocadas en unacircunferencia de radio 133 m donde realizamos un giro electroacutenico consistente en que solamente una antenade la circunferencia transmite en un instante dado por un tiempo de 1=30 de segundo dividido por el nuacutemerode antenas Es decir conectando secuencialmente las antenas de la agrupacioacuten podemos simular una antenaque gira y produce una modulacioacuten en FM sinteacutetica debida al desplazamiento Doppler aunque la sentildeal decada antena solamente estaacute modulada directamente a AM y los ecos que pueden llegar al receptor despueacutes demultiples reflexiones i) han perdido intensidad y ii) afectan menos a la determinacioacuten de la posicioacuten ya queel Doppler reflejado no es el mismo que el Doppler directo (es decir que la modulacioacuten FM ldquosintetizadardquo conel Doppler no es igual en la sentildeal directa que en las reflxiones) Sin embargo la modulacioacuten en frecuenciapor Doppler contiene la misma informacioacuten que el VOR convencional y permite la computacioacuten de la _Ejercicio opcional Expliacutequese en detalle completo coacutemo conseguir con el VOR Doppler laforma de onda dada por (2) y de doacutende sale el valor del radio de 133 m mencionado arriba5 of 7Radiodeterminacioacuten IT2o CuatrimestrePraacutectica 4 Sistema VORFigure 4 IntegradorFigure 5 Integrador autoreseteado (con error de disentildeo)5