Hasta ahora se ha estudiado como estimar una propiedad utilizando los valores conocidos de dicha...
59
-
Upload
socorro-ramirez -
Category
Documents
-
view
5 -
download
3
Transcript of Hasta ahora se ha estudiado como estimar una propiedad utilizando los valores conocidos de dicha...


Hasta ahora se ha estudiado como estimar una propiedad utilizando los valores conocidos de dicha propiedad obtenidos en puntos vecinos o cercanos o bien como hacer uso de una función de tendencia para guiar la estimación de la propiedad.
A continuación estudiaremos algunas técnicas geoestadísticas propuestas para obtener estimaciones de la propiedad de interés cuando se dispone de observaciones de otras variables relacionadas con la variable en estudio.
Geoestadística multivariada
Entre este tipo de técnicas se encuentran:
Cokriging Simple y Ordinario
Cokriging colocado (collocated cokriging)

Geoestadística multivariada
Al igual que en el caso de geoestadistica univariada, lo fundamental es contar con una herramienta que mida la correlación espacial de las variables involucradas y su interrelación.
La correlación espacial de cada una de las variables involucradas se obtiene como antes a través de la función de covarianza o del variograma.
La correlación espacial conjunta o la interrelación se obtiene a traves de la funcion de covarianza cruzada que estudiaremos a continuación

VARIOGRAMA CRUZADOcomportamiento espacial en conjunto
ZS

Si Z y S son funciones aleatorias estacionarias o intrínsecas, el variograma cruzado de ellas se define como :
))]()(())()([(21
)( hxSxShxZxZEhZS
))()(())()((2
1)(*
jihxx
jiZS xsxsxzxzhN
h
ji
Para su estimación se utiliza el variograma cruzado experimental
ZS

1) 00 ZS
2) hhZSZS
3) El variograma cruzado es una función simétrica
Algunas propiedades del variograma cruzado son:
hhSZZS
4) Relación con la función de covarianza cruzada
SZZS mhxSmxZEhC
La función de covarianza cruzada se define como:
ZS

hChCCh SZZSZSZS 21
0)(
La función de covarianza cruzada se relaciona con el variograma cruzado a través de la ecuación
Esta expresión se debe al hecho de que la función de covarianza no necesariamente es simétrica. Es decir, en general
hChC SZZS
ZS
Sin embargo, una práctica común es asumir que la función de covarianza es simétrica. Esto simplifica enormemente los cálculos asociados a la estimación de la función de covarianza conjunta. En ese caso,
hCCh ZSZSZS 0)(

ZS5) Relación de dependencia
Es importante tener presente que entre el variograma cruzado y los variogramas de cada una de las variables, existe una relación de dependencia. Por ejemplo, se puede demostrar que:
hhh SZZS 2Desigualdad de Hölder
2222SZZS
En particular, El producto de cada uno de los sill de los variogramas individuales es mayor que el cuadrado del sill del variograma cruzado.
En consecuencia, el modelo de variograma cruzado no puede ser escogido independientemente de cada uno de los modelos de variogramas
individuales !

5) El modelo de coregionalización lineal
ZS
Anteriormente se aseguraba que la varianza de combinaciones lineales de la variable de interés era positiva utilizando modelos de variograma. Al incluir más variables, es necesario asegurar que la varianza de combinaciones lineales de estas sea positiva.
Para lograr esto se utiliza el modelo lineal de coregionalización, que establece que los variogramas individuales y el cruzado son combinaciones lineales de modelos de variogramas. En el caso de 2 variables se tiene que:
hwhwhwh
hvhvhvh
huhuhuh
mmZS
mmS
mmZ
2211
2211
2211

Las ecuaciones anteriores se puede escribir en forma matricial como:
)(0
0)(
)(0
0)(
)()(
)(
1
1
11
11
h
h
vw
wu
h
h
vw
wu
hh
hh
m
m
mm
mm
SZS
ZSZ
ZS
Cada una de las matrices que contienen los variogramas son definidas positivas, por lo tanto para que el resultado final sea una matriz definida positiva debe ocurrir que:
0ju 0jv 02 jjj wvu

ZSEl uso del modelo de coregionalización lineal tiene las siguientes consecuencias:
1) Todo estructura presente en el variograma cruzado deber estar presente en los variogramas individuales. El recíproco no es cierto.
2) Los variogramas individuales tendrán todos el mismo rango y la forma del variograma será la misma. Sólo se diferenciarán en los valores del sill
Esto hace que en general resulte engorroso ajustar variogramas experimentales de las variables y sus variogramas cruzados, ya que al cambiar los valores del variograma cruzado cambian los valores de los variogramas individuales. La forma de juzgar la bondad del ajuste es establecer un compromiso entre el ajuste de cada uno de los variogramas y su desviación de los valores experimentales.
3) Los variogramas individuales tendrán todos la misma dirección de anisotropía

ZS
4) Envolvente del variograma cruzado
Debido a la relación entre los parámetros u, v y w el variograma cruzado se encuentra siempre dentro de dos curvas que conforman su envolvente.
h
ZS


Planteamiento básico de la estimación por Cokriging:
Cokriging
Considerar la estimación de como una combinación lineal de lasobservaciones disponibles de Z más combinaciones lineales de las observaciones de las variables relacionadas.
Z Propiedad o variable principal, por ejemplo porosidad
S Información o variable secundaria, por ejemplo impedancia acústica
Ejemplo:
+
Combinación lineal de la variable principal
Combinación lineal de la variable secundaria

Cokriging
Z Propiedad o variable principal, por ejemplo porosidad
iS Variables secundarias, por ejemplo atributos sísmicos
En el caso general lo único que se complica es la notación :
Combinaciones lineales de las variables secundarias
Combinación lineal de la variable principal
+
+ ++

Cokriging
El caso más simple se denomina cokriging simple y la hipótesis básica es la estacionaridad de todas las variables junto con el hecho de que se asume que las medias de todas las variables son conocidas. Esto es,
COKRIGING SIMPLE
conocidaesy mmuZE
jmmuSE jjj conocidaesy
A continuación se obtendrán las ecuaciones de cokriging simple en el caso en que se considera solo una variable secundaria. En este caso el estimador propuesto es

Cokriging
Al igual que antes, las condiciones de optimalidad son:
1) Estimador insesgado uZEuZE cok ))(( *
2) ]var[ * uZuZ cok mínima
La primera condición se obtiene automáticamente al utilizar que:
0 muZE
011 1 mxSE
Con lo cual,
uZEmuZE cok ))(( *

Cokriging
La condición de varianza mínima se obtiene derivando respecto a los parámetros y e igualando a cero cada una de las derivadas obtenidas.
Ncok juZuZ
j
,,2,1*
0)]()(var[
1,,2,1*
0)]()(var[
Ncok juZuZ
j
Para calcular explícitamente la expresión de la varianza hay que proceder con cautela debido a que aparecen nuevos términos a considerar.
))(),(cov(2)](var[)](var[)]()(var[ *** uZuZuZuZuZuZ cokcokcok
1T 2T 3T

Cokriging
21 )](var[ uZT
)](var[ *2 uZT cok
)(2)()( jiZSjiiSjiiZji xuCxxCuuC jj
)))((),)((cov(2)))((var()))((var( jjjiijjjii mxSmuZmxSmuZ
Covarianza de la variable principal
Covarianza de la variable secundaria
Covarianza cruzada entre la variable primaria y la variable secundaria
)(2)(2))(),(cov(2 *3 jZSjiZicok xuCuuCuZuZT

Cokriging
Al calcular las derivadas respectivas se obtiene que
NiZ
N
jjiZSj
N
jjiZj
i
cok iuuCxuCuuCuZuZ
,,2,1
11
*222
)]()(var[
1,,2,1
11
*)(222
)]()(var[NiZS
N
jjiZSj
N
jjiSj
i
cok ixuCxuCxxCuZuZ
Ahora la expresión detallada del sistema de ecuaciones es

Cokriging
1111111
1
1
1
1
1
2
1
2
1
2
1
2
1
2121
21222212
12112111
2121
22212212
12111121
0|
|
0|
0|
|
|0
|
|0
|0
NS
S
S
NZ
Z
Z
N
N
SNSNSNNSZNSZNSZ
NSSSNSZSZSZ
NSSSNSZSZSZ
NNZSNZSNZSZNZNZ
NZSZSZSNZZZ
NZSZSZSNZZZ
xuC
xuC
xuC
uuC
uuC
uuC
CxxCxxCuxCuxCuxC
xxCCxxCuxCuxCuxC
xxCxxCCuxCuxCuxC
xuCxuCxuCCuuCuuC
xuCxuCxuCuuCCuuC
xuCxuCxuCuuCuuCC
Su
Zu
SSZ
ZSZ
C
C
CC
CC

Cokriging
COKRIGING ORDINARIO
Al igual que en el caso de kriging ordinario, se asume que las medias de las variables son desconocidas y se imponen condiciones para filtrarlas.
+
El estimador propuesto es
Con lo cual,
K
j
N
jcok
j
j
jmmuZE
1 1
* ))((
Y se obtienen las condiciones,
1 K
N
jj
j
j,,2,1
1
0

Cokriging
Ahora se procede nuevamente como en el kriging ordinario pero con K+1 parámetros de Lagrange. Cuando se tiene tan solo una variable secundaria, el sistema de ecuaciones del cokriging ordinario es
0
1
0010
0001
10
01
2
1
Su
Zu
SSZ
ZSZ
C
C
CC
CC

Cokriging
OBSERVACIONES
1) Con sólo 2 variables se requieren 4 funciones de covarianza. En general, con N variables secundarias se requieren 2N+1 funciones de covarianza.
3) Las variables secundarias deben poseer un número mucho mayor de observaciones que la variable principal.
2) Debe existir una correlación lineal entre las variable principal y las variables secundarias

Cokriging
4) Imposible estimar las covarianzas cruzadas con datos NO coincidentes
Variable secundaria (impedancia acústica)
Variable principal (porosidad)

Cokriging
5) Resultados satisfactorios se obtienen con datos parcialmente coincidentes
Variable secundaria (impedancia acústica)
Variable principal (porosidad)
Variable principal y variable secundaria

Cokriging
6) Con datos totalmente coincidentes
Conveniente para estimar de manera consistente el tope y la base de un yacimiento
Tope
Base
No se obtiene una mejora sustancial sobre los métodos de kriging cuando la variable secundaria es la información sísmica.

Cokriging
Cuando las variables están intrínsicamente relacionadas, es decir cuando ocurre que los modelos de variograma o covarianza de todas las variables son proporcionales a un un mismo modelo de variograma o covarianza, entonces el kriging y el cokriging con datos totalmente coincidentes son iguales.
!


Collocated Cokriging
Una simplificación al sistema de ecuaciones del Cokriging se obtiene cuando se considera solo una variable secundaria y únicamente en el punto donde se requiere realizar la estimación.
En este caso, el estimador propuesto es
Al igual que antes se obtienen distintas versiones cuando se conoce o no la media de las variables involucradas.
A continuación estudiaremos el cokriging colocado simple y el cokriging colocado ordinario.

Collocated Cokriging
COLLOCATED SIMPLE COKRIGING
La hipótesis básica es la estacionaridad de las variables junto con el hecho de que se asume que las medias de las variables son conocidas. Esto es,
conocidaesy mmuZE
conocidaesy SS mmuSE
En este caso, el estimador propuesto es
Al proceder exactamente igual que en el caso de cokriging simple se obtiene que:

Collocated Cokriging
NiZiZS
N
jjiZj
i
ck iuuCuuCuuCuZuZ
,,2,1
1
*222
)]()(var[
)0(222)]()(var[
1
2*
ZS
N
iiZSjS
ck CuuCuZuZ
Ahora se obtiene un sistema de ecuaciones de N+1 variables con N+1 incógnitas en lugar del sistema de N+ N1 ecuaciones con N+ N1 variables del kriging simple con solo una variable secundaria.
El sistema de ecuaciones se escribe en forma matricial como:

Collocated Cokriging
0
0
0
0
2
1
2
1
221
21
2212
1121
ZS
NZ
Z
Z
N
SNZSZSZS
NZSZNZNZ
ZSNZZZ
ZSNZZZ
C
uuC
uuC
uuC
uuCuuCuuC
uuCCuuCuuC
uuCuuCCuuC
uuCuuCuuCC
Es importante observar que:
• No se requiere conocer la función de covarianza de la variable secundaria.
• El sistema sólo depende de la función de covarianza de la variable principal y de la función de covarianza cruzada.
• Es necesario conocer el valor de la variable secundaria en todo los puntos donde se requiere estimar el valor de la variable primaria.

Collocated Cokriging
Aproximación de la covarianza cruzada
En el cokriging colocado se asume que la función de covarianza cruzada y la función de covarianza de la variable principal son proporcionales. Es decir, que
hhCbhC ZZS
Esta hipótesis tiene sentido porque se asume una relación lineal entre las variables. Además, en particular se tiene que:
000
00/0
0
0ZS
Z
ZSZS
Z
ZS CCC
CCC
C
Cb
000 ZS
ZCC
CZS
ZS
Z
SC
C 0
0

En consecuencia,
hhC
C
ChC Z
Z
SZS ZS
0
0
Collocated Cokriging
Correlación lineal entre las variables Z y S.
Esta expresión permite manipular el coeficiente de correlación y obtener así diversas estimaciones de la variable principal para distintos grados de correlación con la variable secundaria.
Es importante cuando se tiene incertidumbre sobre el grado de relación lineal de las variables involucradas.

COLLOCATED ORDINARY COKRIGING
Collocated Cokriging
Al igual que en el caso del cokriging ordinario se asume que las medias de la variable principal y la variable secundaria son desconocidas y constantes.
Ahora el estimador propuesto es:
Bajo esta suposición, la forma del estimador es distinta puesto que si se utiliza la anterior se obtiene =0 y la variable secundaria no es tomada en cuenta.
Valores de la variable principal y la variable secundaria medidos en los mismos puntos
Valor de la variable secundaria en el punto a estimar

Collocated Cokriging
Para que el estimador sea insesgado se debe verificar que:
NN
w11
0y 1
Ahora se procede como antes, considerando dos multiplicadores de Lagrange para incluir las restricciones anteriores. El sistema de ecuaciones es:
0
1
β
λ
001
000
10
2
1
2ZS
ZS
Z
SZS
S
ZS
c
c
wcc
c
c
tt
tt
ts
tSZS
ZSZ
10
01
10CC
01CC


La idea consiste en asumir que la propiedad observada Z(u) es la suma de diversos factores aleatorios e independientes. Es decir,
uZuZuZuZ K 21
Los factores no son directamente observables, sólo se cuenta con la observación Z(u).
La descomposición anterior puede variar dependiendo de las condiciones asumidas sobre la propiedad observada.
Por ejemplo, si se conoce el valor promedio m de la propiedad entonces se considera
uZuZuZmuZ K 21
y los factores como funciones aleatorias independientes de media cero.
Kriging Factorial

Kriging Factorial
La importancia de considerar a los factores como independientes es que se puede demostrar que:
hChChC KZ 1
Y es esta relación la que permite obtener estimaciones de cada una de los factores en la descomposición de la variable Z.
A continuación se estudiarán las ecuaciones para la obtención de dichas estimaciones.

Kriging Factorial
CASO 1
Se asume que Z es una función aleatoria estacionaria con media igual a cero que se descompone como suma de K factores aleatorios de media cero e independientes.
uZuZuZuZ K 21
El estimador propuesto para el factor j es:
KjuZuuZ j ,2,1*
Los Valores observados se utilizan para estimar los valores de los factores

Kriging Factorial
Como la variable y cada uno de los factores tienen media cero se obtiene directamente que:
uZEuZE jj *
Respecto a la varianza del error, se tiene que:
uZuZuZuZuZ jjjjjj**2* ,cov2]var[]var[
i
ijZj uZuZuuC )(),(cov2,
2
uuCuuC jZj 2,
2
Independencia de los factores

Kriging Factorial
A partir de esta expresión se tiene que:
NuuCuuCuZuZ
jZjj ,2,122
]var[ *
Y al igualar a cero se obtiene el sistema de ecuaciones:
NuuCuuC jZ ,2,1
Matriz de kriging simple de Z
Vector asociado a la función de covarianza del factor j

Kriging Factorial
1) La matriz de kriging es siempre la misma y lo que cambia es el vector asociado a la función de covarianza del factor j. Esto implica que es necesario invertir la matriz sólo una vez para obtener la estimación de todos los factores.
Observar que:
2) Si alguno de los factores está asociado a un effecto nugget puro entonces este no se puede estimar. Este procedimiento sólo cambia los valores de las variable Z en los puntos observados.Para efectos prácticos es mejor no considerarlo en la descomposición.
3) El número de factores se puede obtener a partir del número de estructuras presentes en la función de covarianza o variograma de la variable Z
4) La descomposición de la variable Z en factores debe tener sentido físico y no ser producto solamente de las estructuras observadas en el variograma.

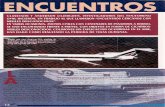
Kriging Factorial
0.
0.
10.
10.
20.
20.
30.
30.
40.
40.
X (Kilometer)
X (Kilometer)
0. 0.
10. 10.
20. 20.
30. 30.
40. 40.
Y (Kilometer)
Y (Kilometer)
>=12.968612.125811.282910.449.597168.754297.911427.068566.225695.382824.539953.697082.854222.011351.168480.325613-0.517255-1.36012-2.20299-3.04586-3.88873-4.73159-5.57446-6.41733-7.2602-8.10307-8.94593-9.7888-10.6317-11.4745-12.3174-13.1603<-14.0031
N/A
0
0.5
1
1.5
2
2.5
3
3.5
4
4.5
0 1.3 2.6 3.9 5.2 6.5 7.8 9.1 10.4 11.7 13 14.3 15.6 16.9
Z
Z

Kriging Factorial
0
0.5
1
1.5
2
2.5
0 1.3 2.6 3.9 5.2 6.5 7.8 9.1 10.4 11.7 13 14.3 15.6 16.9
0.
0.
10.
10.
20.
20.
30.
30.
40.
40.
X (Kilometer)
X (Kilometer)
0. 0.
10. 10.
20. 20.
30. 30.
40. 40.
Y (Kilometer) Y
(Kilometer)
>=7.154796.713766.272735.83175.390674.949644.508614.067583.626553.185532.74452.303471.862441.421410.9803770.5393470.0983174-0.342712-0.783742-1.22477-1.6658-2.10683-2.54786-2.98889-3.42992-3.87095-4.31198-4.75301-5.19404-5.63507-6.0761-6.51713<-6.95816
N/A
0.
0.
10.
10.
20.
20.
30.
30.
40.
40.
X (Kilometer)
X (Kilometer)
0. 0.
10. 10.
20. 20.
30. 30.
40. 40.
Y (Kilometer) Y
(Kilometer)
>=9.285238.707568.129897.552226.974556.396885.819215.241544.663864.086193.508522.930852.353181.775511.197840.6201670.0424957-0.535175-1.11285-1.69052-2.26819-2.84586-3.42353-4.0012-4.57887-5.15654-5.73421-6.31189-6.88956-7.46723-8.0449-8.62257<-9.20024
N/A
0
0.5
1
1.5
2
2.5
0 1.3 2.6 3.9 5.2 6.5 7.8 9.1 10.4 11.7 13 14.3 15.6 16.9

CASO 2
Se asume que Z es una función aleatoria estacionaria con media igual a m que se descompone como suma de K factores aleatorios de media cero e independientes.
uZuZuZmuZ K 21
El estimador propuesto para el factor j es:
KjuZuuZ j ,2,1*
Ahora se tiene que
i
ij uZEmuZE
*
Kriging Factorial

Kriging Factorial
Y por lo tanto, para que el estimador sea insesgado se debe imponer la condición
1
Ahora se procede como en el caso de kriging ordinario y se obtiene el sistema de ecuaciones
Nj
N
Z uuCuuC ,,2,1
1

101111
10
10
10
2
1
2
1
22
212
121
Nj
j
j
NZNZNZ
NZZZ
NZZZ
uuC
uuC
uuC
CuuCuuC
uuCCuuC
uuCuuCC
Matriz de kriging oridnario de Z
Vector asociado a la función de covarianza del factor j
Kriging Factorial

CASO 3
Se asume que Z es una función aleatoria con una función de tendencia m(u) conocida que se descompone como suma de K factores aleatorios de media cero e independientes.
uZuZuZumuZ K 21
El estimador propuesto para el factor j es:
KjuZuuZ j ,2,1*
Ahora se tiene que
i
ij uZEumuZE
*
Kriging Factorial

Y por lo tanto, para que el estimador sea insesgado se debe imponer la condición
0
um
Kriging Factorial
Ahora se procede como en el caso de kriging universal y se obtiene el sistema de ecuaciones
Nj
N
Z uuCumuuC ,,2,1
1

CASO 4
Se asume que Z es una función aleatoria con una función de tendencia m(u) desconocida que se descompone como suma de K factores aleatorios independientes.
uZuZuZuZ K 21
El problema que se tiene ahora es saber cuál es la contribución de cada uno de los factores a la tendencia de la función Z ya que
uZEuZEuZEuZE K 21
El problema puede ser resuelto asumiendo dos condiciones que a priori resultan arbitrarias.
Kriging Factorial

Kriging Factorial
• Se asume que solo uno de los factores está asociado a la función de tendencia que se observa en la variable Z mientras que los otros tienen media cero. Asi, se tendría por ejemplo:
1,2,10 KjuZE j
umuZE K
• Análogamente al caso de kriging universal, se asume que la función de tendencia es de la forma:
100
fufaumL
jjj

Kriging Factorial
De esta forma,
uZEuZE Kj*
l
ll ufa
Y al igual que en el caso de kriging universal hay que imponer la condición siguiente para asegurar que el estimador es insesgado:
Kjsiufl 0
Kjsiufuf ll
ó

Kriging Factorial
Ahora se procede como en el caso de kriging universal y se obtiene el sistema de ecuaciones
Njl
ll
N
Z uuCufuuC ,,2,1
1
Donde
nosi
jisiji
0
1 (Función Delta de Kronecker)

Kriging Factorial
FILTERING
Hasta ahora se ha visto como estimar cada uno de los factores presentes en la descomposición de Z.
Otra aplicación posible es obtener una estimación de la variable original Z pero filtrando uno o varios factores.
uZuZuZuZ K 21
)(uZ f
Zf (u) se obtiene al filtrar la componente Z1 (u). Por consiguiente, una estimación
de Z filtrando el valor de Z1 se obtiene al estimar Zf (u)

Kriging Factorial
Asumiendo que todas las variables tienen media cero, el estimador
uZuZ f )(*
es insesgado. Además, la varianza del error es
uZuZuZuZuZuZ ffffff*** ,cov2]var[]var[]var[
K
jjf uZ
2
2]var[ Por la independencia de los factores
jiZjji
if uuCuZ ,
* ]var[
uuCuZuZZuZfZfff ,cov,cov * Por la independencia de los
factores

NuuCuuCuZuZ
fZZff ,2,122
]var[ *
Y al igualar a cero se obtiene el sistema de ecuaciones:
NuuCuuCfZZ ,2,1
En consecuencia,
Kriging Factorial

Kriging Factorial
Debido a la independencia entre los factores, la función de covarianza de la variable filtrada se conoce, ya que
hChChChCKf ZZZZ
32