Geometria Unidad I
7
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática UNIDAD I La geometría estudia las relaciones que ligan directa o indirectamente los elementos (puntos, rectas, planos) constitutivos de las figuras geométricas. GRUPOS DE AXIOMAS RELACIONES DE ENLACE O INCIDENCIA: de estar en, pasar por. unir, etc. RELACIONES DE ORDENACIÓN: estar entre, separar, preceder, seguir, etc. RELACIONES DE IGUALDAD O CONGRUENCIA: igualdad de triángulos, etc. RELACIONES DE PARALELISMO: si una recta corta a otra, corta a todas las //. RELACIONES DE CONTINUIDAD: puntos de intersección de recta y circunferencia, etc. AXIOMAS DE INCIDENCIA O ENLACE AX1. Existen infinitos entes llamados “puntos” cuyo conjunto llamaremos “espacio”. En el espacio existen subconjuntos de infinitos puntos llamados planos métricos y en cada plano existen infinitos subc onjunto s de infinitos punto s llam ados rectas métricas. AX2. Dos puntos distintos determinan una recta a la cual pertenecen. Al decir determinan significa que existe y es única dicha recta. AX3. Tres puntos distintos no pertenecientes a una misma recta determinan un plano al que perten ece n. AX4. Si dos puntos distintos pertenecen a un plano, la recta que determinan está incluida en él. TEOREMA I :Si un punto no pertenece a una recta, ambos determinan un plano en el cual la recta está incluida y el punto pertenece. H) a ∉ R T) a y R ≡ α / R ⊂ α y a ∈ α D) Existen cia: En R considero do s puntos tales que b y c ∈R (por AX1) a ∉ R (por hipótesis) ⇒ a, b y c determinan α (por AX3) Tal que a ∈ α yb ∈ α pero b y c ≡ R ⇒ R ⊂ α (por AX4) Unicidad : Supongamos que existe α ’ / a ∈ α ’ y R ⊂ α ’ b ∈ R y R ⊂ α ’ ⇒b ∈ α ’ c ∈ R y R ⊂ α ’ ⇒c ∈ α ’ ⇒ α = α ’ (pues si no contradice AX4) TEOREMA II: Dos rectas que tiene sólo un punto en común (se dice que se cortan) determinan un plano en el cual está incluidas. H) A y B rectas / A ∩ B ≡ {o} T) A y B ≡ α / A ⊂ α y B ⊂ α D) Existen cia: ∃ r ∈ A/ r ≠ o (AX1) ; ∃ q ∈ B /q ≠ o Entonces r, q y o ≡ α (AX3) / q ∈ α , r ∈ α y o ∈ α si o ∈ α y r ∈ α ⇒ A ⊂ α si o ∈ α y r ∈ α ⇒ B ⊂ α Unicidad : Supongamos que ∃ β / A ⊂ β y B ⊂ β entonces si A ⊂ β ⇒ r ∈ β y o ∈ β B ⊂ β ⇒q ∈ β Lic: Ana María Conversano Página 1 de 6 (AX4) r, o, q ≡ β ⇒α = β (AX3) o q r B A a , b y c ≡ α ’ (por AX3)
-
Upload
oscar-escobar -
Category
Documents
-
view
254 -
download
0
Transcript of Geometria Unidad I

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 1/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
UNIDAD I
La geometría estudia las relaciones que ligan directa o indirectamente los elementos (puntos,rectas, planos) constitutivos de las figuras geométricas.
GRUPOS DE AXIOMAS RELACIONES DE ENLACE O INCIDENCIA: de estar en, pasar por. unir, etc.
RELACIONES DE ORDENACIÓN: estar entre, separar, preceder, seguir, etc.
RELACIONES DE IGUALDAD O CONGRUENCIA: igualdad de triángulos, etc.
RELACIONES DE PARALELISMO: si una recta corta a otra, corta a todas las //.
RELACIONES DE CONTINUIDAD: puntos de intersección de recta y circunferencia, etc.
AXIOMAS DE INCIDENCIA O ENLACE
AX1. Existen infinitos entes llamados “puntos” cuyo conjunto llamaremos “espacio”. En elespacio existen subconjuntos de infinitos puntos llamados planos métricos y en cada
plano existen infinitos subconjuntos de infinitos puntos llamados rectas métricas.
AX2. Dos puntos distintos determinan una recta a la cual pertenecen. Al decir determinansignifica que existe y es única dicha recta.
AX3. Tres puntos distintos no pertenecientes a una misma recta determinan un plano al que pertenecen.
AX4. Si dos puntos distintos pertenecen a un plano, la recta que determinan está incluida en él.
TEOREMA I :Si un punto no pertenece a una recta, ambos determinan un plano en el cual larecta está incluida y el punto pertenece.
H) a ∉ R T) a y R ≡ α / R ⊂ α y a ∈ α
D) Existencia: En R considero dos puntos tales que b y c ∈R (por AX1)a ∉ R (por hipótesis) ⇒ a, b y c determinan α (por AX3)Tal que a ∈ α yb ∈ α pero b y c ≡ R ⇒ R ⊂ α (por AX4)
Unicidad : Supongamos que existe α’ / a ∈ α’ y R ⊂ α’b ∈ R y R ⊂ α’ ⇒b ∈ α’c ∈ R y R ⊂ α’ ⇒c ∈ α’
⇒ α = α’ (pues si no contradice AX4)
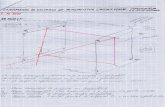
TEOREMA II : Dos rectas que tiene sólo un punto en común (se dice que se cortan) determinanun plano en el cual está incluidas.
H) A y B rectas / A ∩ B ≡ {o} T) A y B ≡ α / A ⊂ α y B ⊂ α
D) Existencia: ∃ r ∈ A/ r ≠ o (AX1) ; ∃ q ∈ B /q ≠ oEntonces r, q y o ≡ α (AX3) / q ∈ α, r ∈ α y o ∈ α
si o ∈ α y r ∈ α ⇒ A ⊂ αsi o ∈ α y r ∈ α ⇒ B ⊂ α
Unicidad : Supongamos que ∃ β / A ⊂ β y B ⊂ βentonces si A ⊂ β ⇒ r ∈ β y o ∈ β B ⊂ β ⇒q ∈ β
Lic: Ana María Conversano Página 1 de 6
(AX4)
r, o, q ≡ β ⇒α = β (AX3)
oq
r
B
A
a , b y c ≡ α’ (por AX3)

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 2/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
AXIOMAS DE ORDENACIÓN
Conjunto linealmente ordenado: decimos que un conjunto está linealmente ordenado, cuandoes posible establecer entre sus elementos una relación de orden total estricto (arreflexiva
.asimétrica .transitiva). La relación de orden es “preceder” a
b entre puntos. Decir que unconjunto está linealmente ordenado por la relación de preceder quiere decir que tiene estructurade cadena o es una cadena.
Primero: si en un conjunto C linealmente ordenado existe un elemento p / p ∈ C y se verificaque ∀ x ∈ C ∧ x ≠ p ⇒p x , se dice que p es el primer elemento.
Ultimo: si en un conjunto C linealmente ordenado existe un elemento u / u ∈ C y ∀ x ∈ C ∧ x≠ u, x u, se dice que u es el último elemento.
Denso: un conjunto C linealmente ordenado tal que a y b ∈ C , ∃ x ∈ C / a x b , se diceque C es denso.
AX1. La recta es un conjunto linealmente ordenado de punto que no tiene ni primer ni último punto y es un conjunto denso.
Definiciones
Semirrecta: Es el conjunto de punto formado por un punto de una recta y todos los que lo preceden o bien un punto de una recta y todos los que le siguen. Consecuencia: Dado un puntoen una recta determina en ellas dos semirrectas; este punto se llama origen y las dos semirrectasse dice que son opuestas.
Segmento: Dados dos puntos de una recta a y b, denominamos segmento a la intersección de las
dos semirrectas opuestas: abbaab = y a y b reciben el nombre de extremos. Punto
interior: Se dice que un punto es interior a un segmento si pertenece al mismo y no a uno de susextremos.
Figura: Es cualquier conjunto de puntos.
Figura convexa: Se dice que una figura en convexa si y sólo si, dados dos puntos cualesquierade la figura, el segmento que determinan está incluido en la figura. Consecuencia: Laintersección de dos figuras convexas da como resultados otra figura convexa.
AX2. POSTULADO DE LA DIVISIÓN DEL PLANO: Toda recta incluida en un planodetermina en él tres subconjuntos que son la recta r y dos semiplanos abiertos S1 y S2 de modoque:
S1 ∪ S2 ∪ r = planoS1 ∩ S2 = ∅
S1 ∩ R = ∅
S2 ∩ R = ∅
Definición: S1 ∪ R = semiplano cerrado de borde R S2 ∪ R = semiplano cerrado de borde R
Corolario: Los semiplanos son figuras convexas.
Consecuencias: a ∈ S1 ∧ b ∈ S1 ⇒ ab ⊂ S1
a ∈ S2 ∧ b ∈ S2 ⇒ ab ⊂ S2
a ∈ S1 ∧ b ∈ S2 ∨ a ∈ S2 ∧ b ∈ S1 ⇒ ab ∩ R ≠ ∅
Lic: Ana María Conversano Página 2 de 6

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 3/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
AX3. POSTULADO DE LA DIVISIÓN DEL ESPACIO: Todo plano divide al espacio en tressubconjuntos: dos semiespacios abiertos y el plano.
E1 ∪ E2 ∪ α = espacioE1 ∩ E2 = ∅
E1 ∩ α = ∅E2 ∩ α = ∅
Definición: E1 ∪ α = semiespacio cerrado de borde α E2 ∪ α = semiespacio cerrado de borde α
Corolario: Los semiespacios resultan figuras convexas.
Consecuencias: a ∈ E1 ∧ b ∈ E1 ⇒ ab ⊂ E1
a ∈ E2 ∧ b ∈ E2 ⇒ ab ⊂ E2
a ∈ E2 ∧ b ∈ E1 ∨ a ∈ E1 ∧ b ∈ E2 ⇒ ab ∩ α ≠ ∅
DEFINICIONESSector angular: Dados tres puntos no alineados a, b y c se llama sector angular convexo aldeterminado por la intersección del semiplano de borde ab que contiene al punto c y elsemiplano de borde bc que contiene al punto a. abc= semipl(ab , c) ∩ semipl(bc , c) Consecuencias: b vértice, ba y bc lados.
Sector angular cóncavo: Dados tres puntos no alineados, se llama sector angular cóncavo a launión de dos semiplanos: el de borde ab que no contiene a c y el de borde bc que no contiene a
a . abc cóncavo = semipl( ab , no c ) ∪ semipl(bc , no a)
Sectores angulares adyacentes: Dados en un plano dos rectas A y B incidentes, se llamansectores angulares adyacentes a las intersecciones de uno de los semiplanos de borde B con losdos semiplanos de borde A y viceversa. Consecuencias: - Dos sectores angulares adyacentestienen un lado común y los otros dos lados son semirrectas opuestas.- La unión de dos sectoresangulares adyacentes da un sector angular llano.
Sectores angulares opuestos por el vértice: Dados en un plano dos rectas A y B que se cortan,se llaman sectores angulares opuestos por el vértice a los obtenidos como intersección de uno delos semiplanos de borde A con uno de los de borde B y sus respectivos opuestos. Consecuencia:
Los lados son semirrectas opuestas.
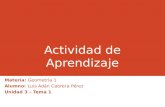
Sector de diedro convexo: Dados cuatro puntos a, b, c y d no coplanares, se llama sector diedro convexo a la intersección del semiespacio de borde abc que contiene a d y elsemiespacio de borde bcd que contiene a a.Sectdiedr(abc; d) = semipl(abc;d) ∩ semipl(bcd, a)
Caras
Arista: recta bc
Lic: Ana María Conversano Página 3 de 6
x
x
x
x
b
a
c d
semipl (bc , a)
semipl (bc , d)

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 4/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
Sector diedro llano: Es un semiespacio.
Sectores de diedros adyacentes: Es la intersección de uno de los semiespacios de borde α conlos de borde β o viceversa. Consecuencia: Tiene una cara en común y las otras dos caras sonsemiplanos opuestos.
Sectores de diedros opuestos por la arista: Es la intersección de un semiespacio de borde αcon un semiespacio de borde β y los respectivos opuestos.
TEOREMA I: Si dos planos diferentes tienen un punto en común, entonces determinan unarecta que pasa por el punto.
H) α ≠ β ; p ∈ α y p ∈ β T) α ∩ β ≡ R / p ∈ R
D) Existencia: En uno de los planos considero dos semirrectas tales que ambas estén incluidas
en un mismo plano y no estén opuestos. Entonces en β, pa y pb están en semiespacios
opuestos de borde α. Entonces a y b ∩ α ≡ {q}(por AX3) ( I )
Como pa y pb no opuestos p ≠ q ⇒ p y q ≡ R / p ∈ R y q ∈ R y q ∈ ab ⇒ q ∈ β ( II ) pero q ∈ α por ( I )
Luego p ∈ α y q ∈ α ⇒R ≡ p y q / R ⊂ αP ∈ β y q ∈ β ⇒R ≡ p y q / R ⊂ β
Unicidad : Supongamos que existe R’ ≠ R / p ∈ R’ y R’ ⊂ α y R’ ⊂ β.Si p ∈ R y p ∈ R’ y R’ ≠ R ⇒ R ∩ R’ ≡ un plano en el que están incluidas
⇒ α = β absurdo por hipótesis ⇒R !.
TEOREMA II:Si en un plano α una semirrecta OA tiene su origen perteneciente a una recta r incluida en α, la semirrecta está, o bien incluida en r o en uno y sólo uno de los
semiplanos de borde r.
H) α plano o ∈ R , R ⊂ α T) oa ⊂ α1 o oa ⊂ α2 o oa ⊂ R
D) Supongamos p ∈ oa / p ∈R ⇒ oa ⊂ R (por AX dos puntos ≠ )
Supongamos que p ∈ oa y p ∈ α1 y q ∈ oa / q ∈ α2 ⇒
⇒ pq es tal que p o q o q o p ABS. (def. semirr)
Luego la única posibilidad es que oa ⊂ α1 o oa ⊂ α2
Definición: p interior al sector angular ⇔p ∉ a sus lados.
Lic: Ana María Conversano Página 4 de 6
x
xx
x b
cd
a
r ≡ α ∩ β
α
β
p
x
x
R
b
q
o
α2 a
α1
R
α
Sector de diedro cóncavo: Dados cuatro puntos a, b, c y d no coplanares, se llama
sector de diedro cóncavo a la unión de lossemiespacios de borde abc que no contiene ad con el de borde bcd que no contiene a a.
a

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 5/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
TEOREMA III: Toda semirrecta interior a un sector angular convexo corta a todo segmento consus extremos pertenecientes uno a cada lado del sector angular.
H) aob convexo, op interior. T) ab ∩ op ≠ ∅
D) Consideremos el punto b’ sobre la semirrecta opuesta ob , ob opuesta a 'ob .El segmento 'ab = 'ab ∩ ab' . Consideremos 'op opuesta a op .
La recta ' pp = 'op ∪ op , luego )'()''('' opopabab ppab ∪∩∩=∩ .
Aplicando distributiva: ])''[(]')''[('' opababopabab ppab ∩∩∪∩∩=∩
)])'('[)]')'('['' opababopabab ppab ∩∩∪∩∩=∩
Luego 'ab y ' pp no tienen puntos comunes, lo que nos explica que a y b’ pertenezcan a un
mismo semiplano respecto de ' pp , pero b pertenece al mismo semiplano ' pp que no contiene a b’. b ∈ semipl( ' pp , no b) ∴ a ∈ semipl( ' pp , b’) De acuerdo al AX2, ab corta ' pp recta
borde y como acb es convexo, op ⊂ ' pp ⇒ op corta a ab en q.
Corolarios: 1) Toda recta interior a un ángulo convexo determina dos ángulos con los ladosdel mismo que tiene en común a dicha semirrecta.
2) Todo ángulo convexo puede considerarse como conjunto formado por los lados ytodas las semirrectas interiores.
DEFINICIONES
Haz de rectas o haz de rayos: Dado un punto o, se llama haz de rayos al conjunto de todas lasrectas incluidas en α que pasen por o.
Triángulo: Dados tres puntos no alineados, se llama triángulo abc a la intersecciónsemipl(ab , c) ∩ semipl(bc , a) ∩ semipl(ac , b). Elementos: lados, ángulos interiores, ángulosexteriores.
Polígono convexo: Dados n puntos coplanares con n ≥ 3 (n finito), no alineados de a tres en undeterminado orden. Si trazamos los semiplanos de borde tal que la recta determinada por dos
puntos contenga a los puntos restantes, la intersección de los mismos da un polígono convexo.Los puntos se llaman vértices, los segmentos que tienen por extremo a todo par de vérticesconsecutivos se denominan lados y los segmentos que tienen por extremos a pares de vérticesno consecutivos, diagonales. Elementos: Contorno abc (figura formada por todos los puntos
pertenecientes a sus lados), sectores angulares externos y sectores angulares internos.
Sector angular poliedro: Dadas tres o más semirrectas en un número finito con origen comúnv, no coplanares de a tres, en un determinado origen de modo que el plano determinado por dosconsecutivas cualesquiera deje a todas las demás en un mismo subespacio, se llama sector angular poliedro a la intersección de dichos semiespacios.
Lic: Ana María Conversano Página 5 de 6
∅ ∅∅∅
oα
α : plano sosténo : centro del haz
Dos caras consecutivas forman un sector diedro interior .Si el número de aristas es tres,entonces es sector de diedro.

5/16/2018 Geometria Unidad I - slidepdf.com
http://slidepdf.com/reader/full/geometria-unidad-i-55ab5185f0f59 6/6
Instituto Superior del Profesorado “Dr. Joaquín V. González” Departamento Matemática
v: vérticevavc, : aristas
avb , bvc : caras (sectores angulares)
Poligonal: Es el conjunto de varios segmentos ordenados k, l ,m etc. de modo tal que elextremo de uno coincide con el del otro (no alineados).
Poligonal cerrada: Ídem anterior, pero el extremo del primer segmento coincide con el vérticedel último.
Poligonal simple: Poligonal cerrada con un único punto común exterior.
Poligonal no simple: Poligonal cerrada con más de un punto común.
Poligonal simple Poligonal no simple
Lic: Ana María Conversano Página 6 de 6
el
m
p
nn
l
m
k
Poligonal abierta
x
v
a
e
b
d
x
c
el
m
n
f
q