Neumática e Hidráulica - Diagramas básicos y sistemas - Simbología neumática

Energía de Fluidos
Fundamentos de neumática
Muestra del material pedagógico 31290-F2
Nº de artículo: 31290-02 Primera edición Actualización: 03/2015
Por el personal de Festo Didactic
© Festo Didactic Ltée/Ltd, Québec, Canada 1999 Internet: www.festo-didactic.com e-mail: [email protected]
Impreso en Canadá Todos los derechos reservados ISBN 978-2-89289-453-0 (Versión impresa) Depósito legal – Bibliothèque et Archives nationales du Québec, 1999 Depósito legal – Library and Archives Canada, 1999
El comprador adquiere un derecho de utilización limitado simple, no excluyente, sin limitación en el tiempo, aunque limitado geográficamente a la utilización en su lugar / su sede.
El comprador tiene el derecho de utilizar el contenido de la obra con fines de capacitación de los empleados de su empresa, así como el derecho de copiar partes del contenido con el propósito de crear material didáctico propio a utilizar durante los cursos de capacitación de sus empleados localmente en su propia empresa, aunque siempre indicando la fuente. En el caso de escuelas/colegios técnicos, centros de formación profesional y universidades, el derecho de utilización aquí definido también se aplica a los escolares, participantes en cursos y estudiantes de la institución receptora.
En todos los casos se excluye el derecho de publicación, así como la inclusión y utilización en Intranet e Internet o en plataformas LMS y bases de datos (por ejemplo, Moodle), que permitirían el acceso a una cantidad no definida de usuarios que no pertenecen al lugar del comprador.
Todos los otros derechos de reproducción, copiado, procesamiento, traducción, microfilmación, así como la transferencia, la inclusión en otros documentos y el procesamiento por medios electrónicos requieren la autorización previa y explícita de Festo Didactic GmbH & Co. KG.
La información contenida en este documento está sujeta a cambios sin previo aviso y no representa ningún compromiso por parte de Festo Didactic. Los materiales Festo descritos en este documento se suministran bajo un acuerdo de licencia o de confidencialidad.
Festo Didactic reconoce los nombres de productos como marcas de comercio o marcas comerciales registradas por sus respectivos titulares.
Todas las otras marcas de comercio son propiedad de sus respectivos dueños. Es posible que en este manual se utilicen otras marcas y nombres de comercio para referirse a la entidad titular de las marcas y nombres o a sus productos. Festo Didactic renuncia a todo interés de propiedad relativo a las marcas y nombres de comercio que no sean los propios.
Símbolos de seguridad y de uso frecuente
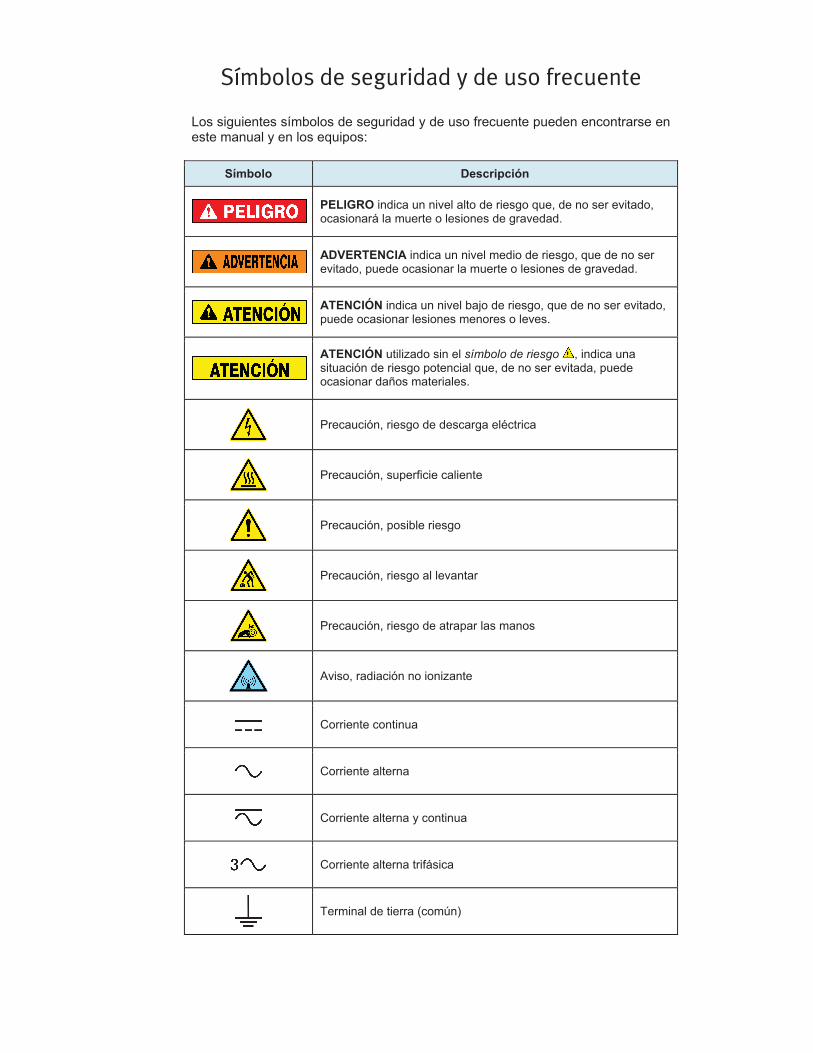
Los siguientes símbolos de seguridad y de uso frecuente pueden encontrarse en este manual y en los equipos:
Símbolo Descripción
PELIGRO indica un nivel alto de riesgo que, de no ser evitado, ocasionará la muerte o lesiones de gravedad.
ADVERTENCIA indica un nivel medio de riesgo, que de no ser evitado, puede ocasionar la muerte o lesiones de gravedad.
ATENCIÓN indica un nivel bajo de riesgo, que de no ser evitado, puede ocasionar lesiones menores o leves.
ATENCIÓN utilizado sin el símbolo de riesgo , indica una situación de riesgo potencial que, de no ser evitada, puede ocasionar daños materiales.
Precaución, riesgo de descarga eléctrica
Precaución, superficie caliente
Precaución, posible riesgo
Precaución, riesgo al levantar
Precaución, riesgo de atrapar las manos
Aviso, radiación no ionizante
Corriente continua
Corriente alterna
Corriente alterna y continua
Corriente alterna trifásica
Terminal de tierra (común)
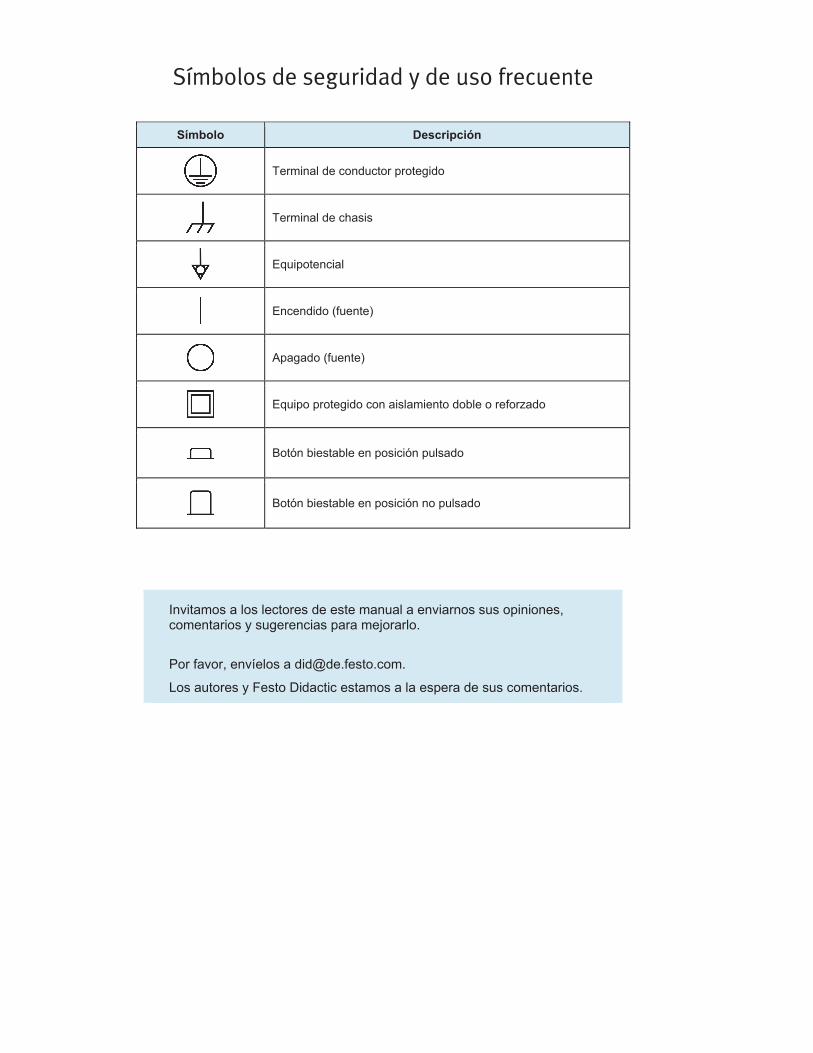
Símbolos de seguridad y de uso frecuente
Símbolo Descripción
Terminal de conductor protegido
Terminal de chasis
Equipotencial
Encendido (fuente)
Apagado (fuente)
Equipo protegido con aislamiento doble o reforzado
Botón biestable en posición pulsado
Botón biestable en posición no pulsado
Invitamos a los lectores de este manual a enviarnos sus opiniones, comentarios y sugerencias para mejorarlo.
Por favor, envíelos a [email protected].
Los autores y Festo Didactic estamos a la espera de sus comentarios.

III
Índice
Introducción . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . V
Contenido del material pedagógico
Fundamentos de neumática . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VII
Control eléctrico de los sistemas neumáticos . . . . . . . . . . . . . . . . . . . . . . . IX
Muestra extraída del manual del estudiante Fundamentos de neumáutica
Ejercicio 4-1 Control indirecto utilizando válvulas accionadas por piloto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
Muestra extraída del manual del estudiante Control eléctrico de los sistemasneumáticos
Ejercicio 3-1 Circuitos electroneumáticos básicos de memoria y prioridad. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
Otra muestra extraída del manual del estudiante Fundamentos de neumática
Examen de la Unidad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
Muestra extraída de la guía del profesor Control eléctrico de los sistemasneumáticos
Unidad 4 Aplicaciones industriales . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35

IV
V
Introducción
El Sistema Didáctico en Neumática de Lab-Volt es una presentación modularizadade los principios de la energía neumática y su aplicación controlada. El SistemaDidáctico en Neumática consta de un programa de entrenamiento introductorio yuno avanzado.
El programa introductorio se basa en dos manuales: Volumen 1, Fundamentos deNeumática, que cubre los principios básicos de neumática; Volumen 2, ControlEléctrico de Sistemas Neumáticos, que cubre los circuitos eléctricos y los diagramasen escalera para aplicaciones neumáticas. Ambos manuales están destinados parautilizarlos con el Sistema Didáctico en Neumática de Lab-Volt.
El programa de entrenamiento avanzado amplía el curso introductorio conaplicaciones neumáticas que demuestran los controles neumáticos, controladoresprogramables, sensores, controles proporcionales y servocontroles. Lasaplicaciones cubiertas se basan en las que podemos encontrar en la industria. Elprograma introductorio es un requisito previo para el programa avanzado.

VI
FUNDAMENTOS DE NEUMÁTICA
Contenido del material pedagógico
VII
Unidad 1 Introducción a la Neumática
Exploración del Sistema Didáctico en Neumática de Lab-Volt y suscomponentes. Reglas de seguridad, identificación de componentes,descripción y operación general. Introducción al equipamiento para elacondicionamiento y distribución de aire.
Ej. 1-1 Familiarización con el Sistema Didácticoen Neumática de Lab-Volt
Descripción del Sistema Didáctico en Neumática de Lab-Volt.Configuración de la superficie de trabajo. Identificación de losdiferentes componentes. Familiarización con los símbolos,características y usos de cada componente. Reglas deseguridad.
Ej. 1-2 Introducción a la Neumática
Introducción a las características, aplicaciones, ventajas ydesventajas de la potencia neumática. Experiencia con uncircuito de demostración utilizando una válvula de controldireccional y un cilindro.
Ej. 1-3 Equipamiento para el acondicionamientoy distribución de aire
Introducción a la unidad de acondicionamiento y suscomponentes: válvulas de interrupción, filtro, manómetro,regulador de presión y silenciador. Estudio acerca de losdepósitos, acumuladores y válvulas de alivio de seguridad.Observación del efecto de la fricción en un circuito dedemostración utilizando un acumulador, una válvula de controldireccional, una válvula de control de flujo y un cilindro.
Unidad 2 Conceptos básicos de Física
Introducción a las relaciones entre presión, fuerza, volumen y caudal.Generación de vacío. Mediciones utilizando componentes neumáticos.Introducción a los caudalímetros, válvulas de aguja, válvulas deretención, válvulas de control de flujo y generadores de vacío.
Ej. 2-1 Relación entre presión y fuerza
Introducción a la relación entre presión y fuerza. Verificaciónde la fórmula F = P x A. Medición de la fuerza provocada porun cilindro en los circuitos de demostración utilizando uncilindro, un manómetro y un dispositivo de carga. Observaciónde la proporcionalidad entre la fuerza aplicada en unasuperficie y la presión resultante sobre dicha superficie.
FUNDAMENTOS DE NEUMÁTICA
Contenido del material pedagógico
VIII
Ej. 2-2 Relación entre presión y volumen
Introducción a la relación entre presión y volumen. Verificaciónde la fórmula (P1×V1)/T1 = (P2×V2)/T2, comprimiendo aire enla cámara de un cilindro en circuitos de demostraciónutilizando un cilindro y un manómetro.
Ej. 2-3 Relación entre caída de presión y caudal
Introducción a la relación entre la caída de presión y el caudalgenerado. Observación del efecto de la carga sobre el caudalen circuitos de demostración utilizando un caudalímetro, unaválvula de control de flujo y un manómetro. Introducción alcaudalímetro, válvulas de aguja, válvulas de retención yválvulas de control de flujo.
Ej. 2-4 Generación de vacío
Introducción a la generación de vacío en circuitos dedemostración utilizando un generador de vacío, cilindros, uncolchón de aire y un manómetro. Demostración de losprincipios de operación de un manómetro, midiendo la alturade una columna de agua en el circuito de demostración.
Unidad 3 Controles básicos de cilindros
Introducción a los componentes empleados en los circuitosfundamentales, en particular, las válvulas de control direccional y loscilindros. Introducción a los métodos de control de velocidad, fuerza ysincronización.
Ej. 3-1 Válvulas de control direccional
Introducción a la operación de las válvulas de controldireccional. Estudio de los símbolos, operadores, construccióny clasificación. Estudio de las válvulas normalmente de pasoy normalmente de no paso. Estudio acerca de cómoseleccionar los circuitos de derivación y las fuentes dealimentación en circuitos de demostración utilizando uncaudalímetro, una válvula de control de flujo y una válvula decontrol direccional de 3 vías y 2 posiciones.
Ej. 3-2 Control direccional y de velocidad de cilindros
Introducción a la operación de los cilindros. Estudio de lossímbolos, parámetros dimensionales, construcción yclasificación. Estudio acerca de cómo controlar la velocidad delos cilindros utilizando las válvulas de control de flujo.Verificación de los métodos de regulación de entrada y salidade control en circuitos de demostración utilizando válvulas decontrol de flujo, control direccional y cilindros.
FUNDAMENTOS DE NEUMÁTICA
Contenido del material pedagógico
IX
Ej. 3-3 Cilindros en serie
Descripción de la operación de un circuito en serie ysincronización de un cilindro. Demostración de laintensificación de presión en los circuitos de demostraciónutilizando una válvula de control direccional y cilindros.
Ej. 3-4 Cilindros en paralelo
Descripción de la operación de un circuito para verificar lasecuencia de extensión de dos cilindros en paralelo que tienendiferentes cargas. Demostración de cómo sincronizar laextensión de los cilindros en paralelo en los circuitos dedemostración utilizando válvulas de control direccional,cilindros y válvulas de control de flujo.
Unidad 4 Controles básicos de motores neumáticos
Introducción a las válvulas de control direccional accionadas por pilotoy a los motores neumáticos. Estudio de los métodos para controlar elpar, velocidad y dirección de rotación de los motores neumáticos.
Ej. 4-1 Control indirecto utilizando válvulasaccionadas por piloto
Introducción a la operación de las válvulas de controldireccional accionadas por piloto. Estudio acerca de laconstrucción y clasificación. Demostración de las ventajas delcontrol indirecto en circuitos utilizando un dispositivo conconducto largo, cilindros y válvula de control direccionalaccionada por piloto de 5 orificios, 4 vías y 2 posiciones.
Ej. 4-2 Circuitos de motores neumáticos
Introducción a los símbolos, construcción y clasificación de losmotores neumáticos. Demostración de cómo controlar el par,la dirección y la velocidad de un motor en un circuito deprueba utilizando válvulas de control direccional, válvulas decontrol de flujo y un motor neumático.
Ej. 4-3 Rendimiento de un motor neumático
Utilización de las hojas de datos del fabricante. Estudio sobrecómo evaluar el rendimiento de un motor neumático en loscircuitos de demostración utilizando un caudalímetro, unaválvula de control de flujo y un motor.

FUNDAMENTOS DE NEUMÁTICA
Contenido del material pedagógico
X
Apéndices A Cuadro de utilización del equipoB Protección del equipo Didáctico en NeumáticaC Símbolos gráficos de Neumática e HidráulicaD Factores de conversiónE Nueva terminología
CONTROL ELÉCTRICO DE LOS SISTEMAS NEUMÁTICOS
Contenido del material pedagógico
XI
Unidad 1 Introducción al control eléctrico de los sistemas neumáticos
Una introducción a los sistemas neumáticos controlados eléctricamente.Descripción de la función de cada parte de un circuito de controleléctrico.
Ej. 1-1 Familiarización con el equipo
Identificación de los componentes utilizados por el controleléctrico del Equipo didáctico en neumática de Lab-Volt.Clasificación de los componentes como elemento de entrada,elemento controlador o mecanismo actuador.
Unidad 2 Conceptos eléctricos
Conceptos básicos de electricidad. Cómo leer, dibujar y conectardiagramas en escalera simples. Experimentación de circuitos básicostípicos implicando válvulas de función lógica.
Ej. 2-1 Electricidad básica
Medida del voltaje, resistencia y corriente en un circuito decontrol eléctrico. Conexión y operación de un circuito decontrol eléctrico
Ej. 2-2 Diagramas en escalera
Definición de un diagrama en escalera. Descripción de cómoun diagrama en escalera opera y cómo se relaciona con elequipo neumático. Reglas para dibujar diagramas en escalera.Conexión y operación de diagramas en escalera básicosutilizando lógicas en serie (Y), paralela (O) y relés de control.
Ej. 2-3 Circuitos neumáticos básicos controlados eléctricamente
Mostrar la ventaja del control indirecto donde una principalválvula direccional es accionada por una señal de presiónsuministrada por otra válvula direccional o por una señaleléctrica proporcionada por un dispositivo de entrada. Cómomejorar el tiempo alternativo de respuesta utilizando unaválvula de escape rápido. Introducción a los interruptoresmagnéticos de proximidad y las válvulas direccionalesaccionadas por solenoide.
Ej. 2-4 Circuitos de función lógica Y y O básicos
Introducir la válvula de función Y y la válvula de charnela (O).Ensamblar y evaluar los circuitos utilizando estas funcioneslógicas.
CONTROL ELÉCTRICO DE LOS SISTEMAS NEUMÁTICOS
Contenido del material pedagógico
XII
Unidad 3 Sistemas funcionales
Conexión y operación de los sistemas neumáticos controladoseléctricamente.
Ej. 3-1 Circuitos electroneumáticos básicos de memoria yprioridad
Mostrar cómo una válvula direccional puede memorizar unaseñal y mantener una posición. Demostrar cómo cerrar y abrirneumáticamente un circuito electroneumático Comparaciónentre los circuitos obturados por aire y los obturadoseléctricamente. Introducción a los interruptores de fin decarrera.
Ej. 3-2 Sistemas de presión múltiple
Utilizar una válvula de descompresión para mostrar cómoobtener una presión más baja en un punto de un circuitomientras la presión funcional de un circuito permanece en unvalor más alto. Ver cómo puede manejar el control depresiones múltiples para crear una desviación en la fuerzaejercida por un accionador al escoger un ajuste diferente depresión. Introducción a los presostatos.
Ej. 3-3 Circuitos neumáticos secuenciales
Aprender los circuitos básicos implicando la secuencia paracontrolar los actuadores en un orden específico. Cómo creareléctricamente una secuencia sin tener una válvula secuencialen el circuito. Introducción a los circuitos de cascada.
Ej. 3-4 Aplicaciones electroneumáticas temporizadas
Crear un circuito alterno para simular una aplicación deoperación de ciclo destacando un relé temporizado. Aprendercómo utilizar la compresión de aire para controlar unaaplicación de temporizado. Introducción al relé temporizado.
Unidad 4 Aplicaciones industriales
Introducir los circuitos y sensores de tipo industrial utilizados en lasdiferentes aplicaciones. Simular las condiciones involucradas y mostrarla ventaja y flexibilidad de un control electroneumático.
Ej. 4-1 Circuitos de desaceleración del actuador neumático
Reproducir una aplicación industrial típica implicando eldesplazamiento en la velocidad o frenado de un actuador.Comparación entre un circuito accionado por aire y un circuitoaccionado eléctricamente.
CONTROL ELÉCTRICO DE LOS SISTEMAS NEUMÁTICOS
Contenido del material pedagógico
XIII
Ej. 4-2 Conteo de ciclos del actuador
Crear un circuito alterno para simular una aplicación deoperación de ciclo. Aprender las reglas básicas implicadas enese tipo de control. Introducción a los contadores.
Ej. 4-3 Sistema de taladrado industrial y circuitos de seguridad
Construir un circuito de máquina de taladrado para reproduciraplicaciones industriales típicas.
Ej. 4-4 Circuito de simulación de un compactador de basura
Para construir un circuito compactador de basura para simularuna aplicación bien conocida como una síntesis de losconceptos previamente aprendidos y cómo montardispositivos de control múltiple para hacerlos funcionarapropiadamente en un circuito electroneumático grande.
Unidad 5 Detección y reparación de fallas
Utilizar métodos simples y lógicos para realizar la detección yreparación de fallas aplicadas en los circuitos eléctricos y neumáticos.
Ej. 5-1 Detección y reparación de fallas en los circuitos decontrol eléctrico
Descripción de los métodos del voltímetro y ohmímetro en ladetección y reparación de fallas en un circuito de controleléctrico. Detección de fallas insertadas por el instructor en lasección eléctrica de un sistema controlado eléctricamente.
Ej. 5-2 Detección y reparación de fallas en los sistemasneumáticos controlados eléctricamente
Aprendiendo un eficiente método de detección y reparación defallas para detectar fallas en un sistema neumático controladoeléctricamente. Detección de fallas insertadas por el instructoren las secciones neumáticas y eléctricas de un circuito.
CONTROL ELÉCTRICO DE LOS SISTEMAS NEUMÁTICOS
Contenido del material pedagógico
XIV
Apéndices A Gráfica de utilización del equipoB Cuidado del equipo didáctico en neumáticaC Símbolos gráficos de hidráulica y neumáticaD Símbolos gráficos del diagrama en escaleraE Factores de conversiónF Procedimiento de verificación del estado del equipo didácticoG Especificaciones del Relé temporizado / ContadorH Nuevos términos y palabras
Muestra extraída del
manual del estudiante
Fundamentos de neumática

3
Ejercicio 4-1
Control indirecto utilizando válvulas accionadaspor piloto
OBJETIVO DEL EJERCICIO
Estudio acerca de las válvulas accionadas por piloto;Demostración de las ventajas del control indirecto de un cilindro de simpleacción.
PRESENTACIÓN
La diferencia principal entre las válvulas de control direccional accionadas por pilotoy las accionadas directamente es cómo se desplazan sus carretes. En las primeras,una señal de aire reemplaza la fuerza mecánica que se debe aplicar para desplazarel carrete de una válvula accionada directamente. Por otra parte, las cubiertas ycarretes de ambos tipos de válvulas son tan similares que con frecuencia esaspiezas son intercambiables.
La gran ventaja de una válvula accionada por piloto es que permite la operaciónteledirigida de válvulas grandes mediante líneas piloto de bajo costo. De este modo,las líneas de trabajo, que son más caras, se pueden mantener cortas a fin de bajarlos costos. Como las líneas piloto son más económicas, se pueden emplear paraciertas distancias sin ninguna pérdida en el funcionamiento del circuito. Dado quelas válvulas accionadas por piloto no deben operarse manualmente, es posiblecontrolarlas con dispositivos o sistemas externos. Esto permite la automatización deprocesos. Además, debido a que los pilotos necesitan presiones y volúmenes deaire mínimos para desplazar los carretes, en comparación con las presiones detrabajo, se reducen los retrasos causados por la compresibilidad del aire y la fricciónen las líneas de tubería larga.
Las válvulas accionadas por piloto pueden ser de 3 y 4 vías (4 ó 5 orificios). Puedenser, además, de 2 ó 3 posiciones. Por lo general, las de 3 vías se utilizan parateledirigir los actuadores lineales o rotativos en una dirección y para luego permitirel escape del aire de las líneas de trabajo. Las válvulas piloto de 4 vías se empleanpara teledirigir los actuadores lineales o rotativos en dos direcciones, así comotambién para permitir el escape del aire de las líneas de trabajo.
Las válvulas accionadas por piloto pueden mover su carrete utilizando uno o dospilotos junto con el resorte de retroceso. Si una válvula de 2 posiciones utiliza unpiloto, éste mueve el carrete de la válvula contra un resorte y hacia la cubiertaopuesta al piloto. El resorte regresa el carrete cuando se deja sin presión el piloto.
Las válvulas de doble piloto tienen un piloto en cada lado de la cubierta. Los pilotosopuestos se utilizan para desplazar los carretes de un lado al otro, pero el circuitodebe liberar un piloto antes que el otro pueda desplazar el carrete. La ausencia deresorte de retroceso en las válvulas de doble piloto permite mantener o memorizarla posición del carrete sin tener presión en el piloto.
Control indirecto utilizando válvulas accionadaspor piloto
4
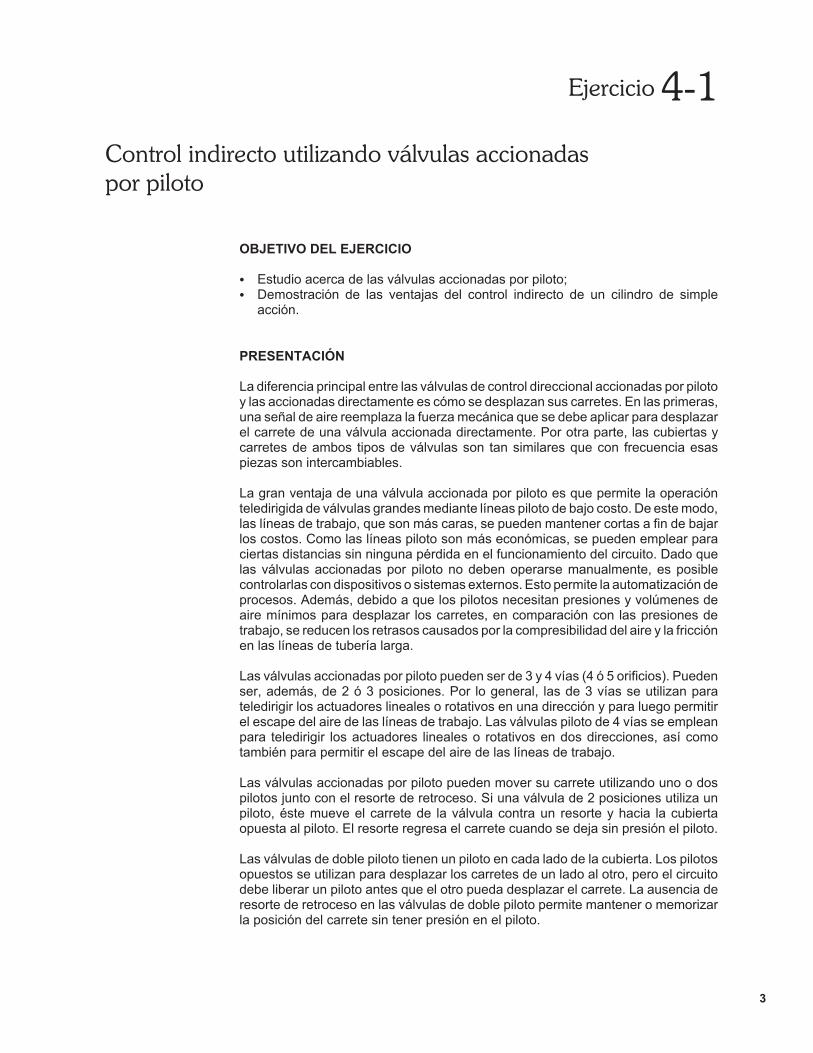
La válvula accionada por piloto proporcionada con su sistema es una válvula decontrol direccional de doble piloto de 4 vías, 5 orificios y 2 posiciones. Se la llamaválvula de 4 vías en lugar de válvula de 5 vías debido a que, en general, uno de losorificios de escape no se utiliza en una posición dada de la válvula. Esto se ilustraen la Figura 4-1.
Figura 4-1. Válvula de control direccional de doble piloto de 4 vías y 2 posiciones.
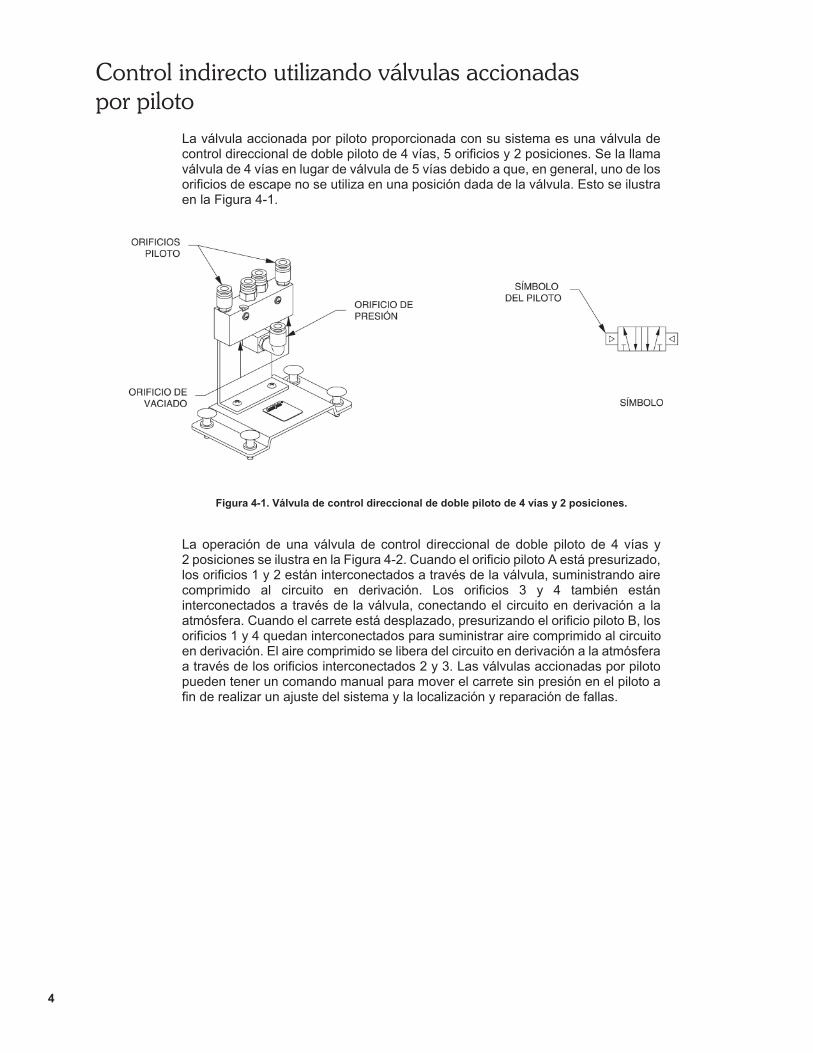
La operación de una válvula de control direccional de doble piloto de 4 vías y2 posiciones se ilustra en la Figura 4-2. Cuando el orificio piloto A está presurizado,los orificios 1 y 2 están interconectados a través de la válvula, suministrando airecomprimido al circuito en derivación. Los orificios 3 y 4 también estáninterconectados a través de la válvula, conectando el circuito en derivación a laatmósfera. Cuando el carrete está desplazado, presurizando el orificio piloto B, losorificios 1 y 4 quedan interconectados para suministrar aire comprimido al circuitoen derivación. El aire comprimido se libera del circuito en derivación a la atmósferaa través de los orificios interconectados 2 y 3. Las válvulas accionadas por pilotopueden tener un comando manual para mover el carrete sin presión en el piloto afin de realizar un ajuste del sistema y la localización y reparación de fallas.
Control indirecto utilizando válvulas accionadaspor piloto
5
Figura 4-2. Operación de una válvula de control direccional de doble piloto de 4 vías y2 posiciones.
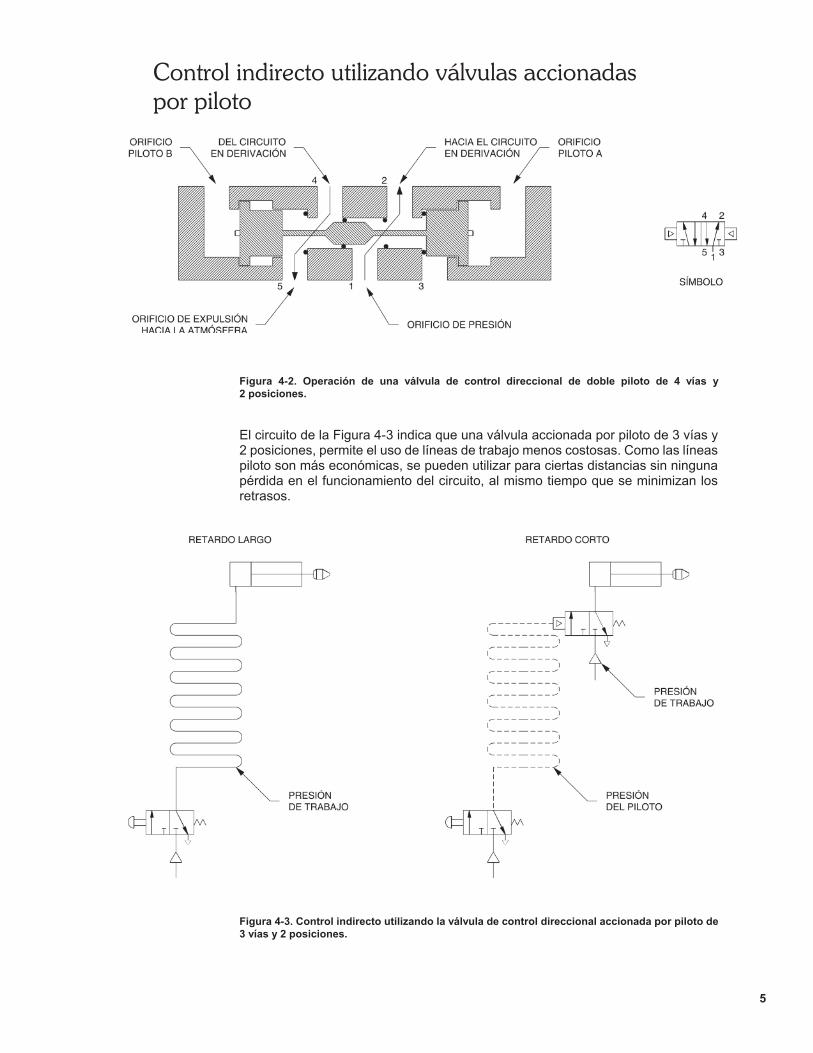
El circuito de la Figura 4-3 indica que una válvula accionada por piloto de 3 vías y2 posiciones, permite el uso de líneas de trabajo menos costosas. Como las líneaspiloto son más económicas, se pueden utilizar para ciertas distancias sin ningunapérdida en el funcionamiento del circuito, al mismo tiempo que se minimizan losretrasos.
Figura 4-3. Control indirecto utilizando la válvula de control direccional accionada por piloto de3 vías y 2 posiciones.
Control indirecto utilizando válvulas accionadaspor piloto
6
MATERIAL DE REFERENCIA
Para más información acerca de las válvulas de control direccional, consulte elcapítulo titulado Directional Control Valves en el manual Industrial PneumaticTechnology de Parker-Hannifin.
Resumen del procedimiento
En la primera parte de este ejercicio, verificará la operación de una válvula decontrol direccional de 4 vías, 5 orificios y 2 posiciones, operando un cilindro de dobleacción.
En la segunda parte, utilizará un dispositivo de conducto largo para verificar que laslíneas piloto necesitan un mínimo de presión y volumen para desplazar el carrete.
Verificará que se puede mantener la prioridad de una posición, cuando el orificiopiloto permanece presurizado. También verificará que el control directo reduce losretrasos causados por la compresibilidad del aire y la fricción en las líneas detubería larga.
EQUIPO NECESARIO
A fin de obtener la lista del material necesario para realizar este ejercicio, consulteel cuadro de utilización del equipo del Apéndice A de este manual.
PROCEDIMIENTO
G 1. Verifique el estado del equipo didáctico de acuerdo con el procedimientodado en el Ejercicio 1-2.
G 2. Retraiga el vástago del pistón del cilindro de doble acción y conecte elcircuito mostrado en la Figura 4-4.
G 3. Del diagrama esquemático mostrado en la Figura 4-4, pronostique si es laválvula DCV1 o la DCV2 la que controla la extensión y/o retracción delvástago del pistón.
G 4. Abra la válvula de interrupción principal y la válvula de interrupción enderivación del colector. Luego ajuste el regulador de presión hasta leer100 kPa (ó 15 psi) en el manómetro regulado.
Control indirecto utilizando válvulas accionadaspor piloto
7
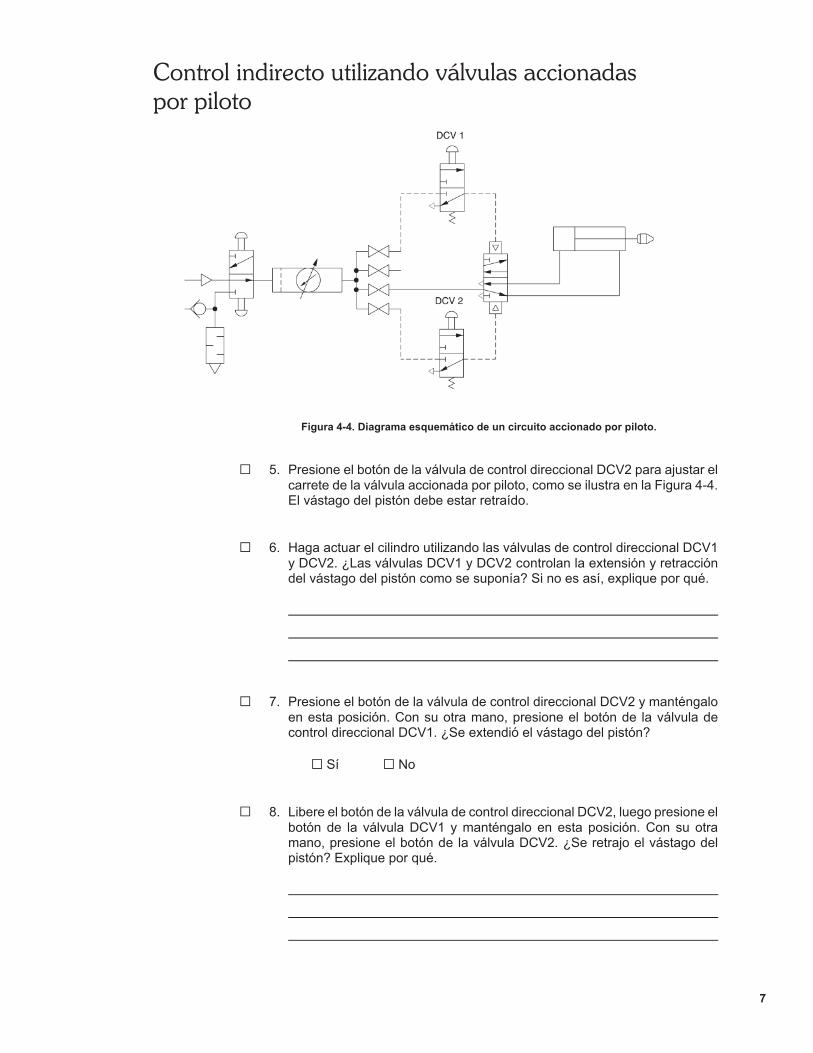
Figura 4-4. Diagrama esquemático de un circuito accionado por piloto.
G 5. Presione el botón de la válvula de control direccional DCV2 para ajustar elcarrete de la válvula accionada por piloto, como se ilustra en la Figura 4-4.El vástago del pistón debe estar retraído.
G 6. Haga actuar el cilindro utilizando las válvulas de control direccional DCV1y DCV2. ¿Las válvulas DCV1 y DCV2 controlan la extensión y retraccióndel vástago del pistón como se suponía? Si no es así, explique por qué.
G 7. Presione el botón de la válvula de control direccional DCV2 y manténgaloen esta posición. Con su otra mano, presione el botón de la válvula decontrol direccional DCV1. ¿Se extendió el vástago del pistón?
G Sí G No
G 8. Libere el botón de la válvula de control direccional DCV2, luego presione elbotón de la válvula DCV1 y manténgalo en esta posición. Con su otramano, presione el botón de la válvula DCV2. ¿Se retrajo el vástago delpistón? Explique por qué.
Control indirecto utilizando válvulas accionadaspor piloto
8
G 9. Cierre las válvulas de interrupción y gire la perilla de ajuste del reguladorcompletamente en el sentido contrario al de las manecillas del reloj.
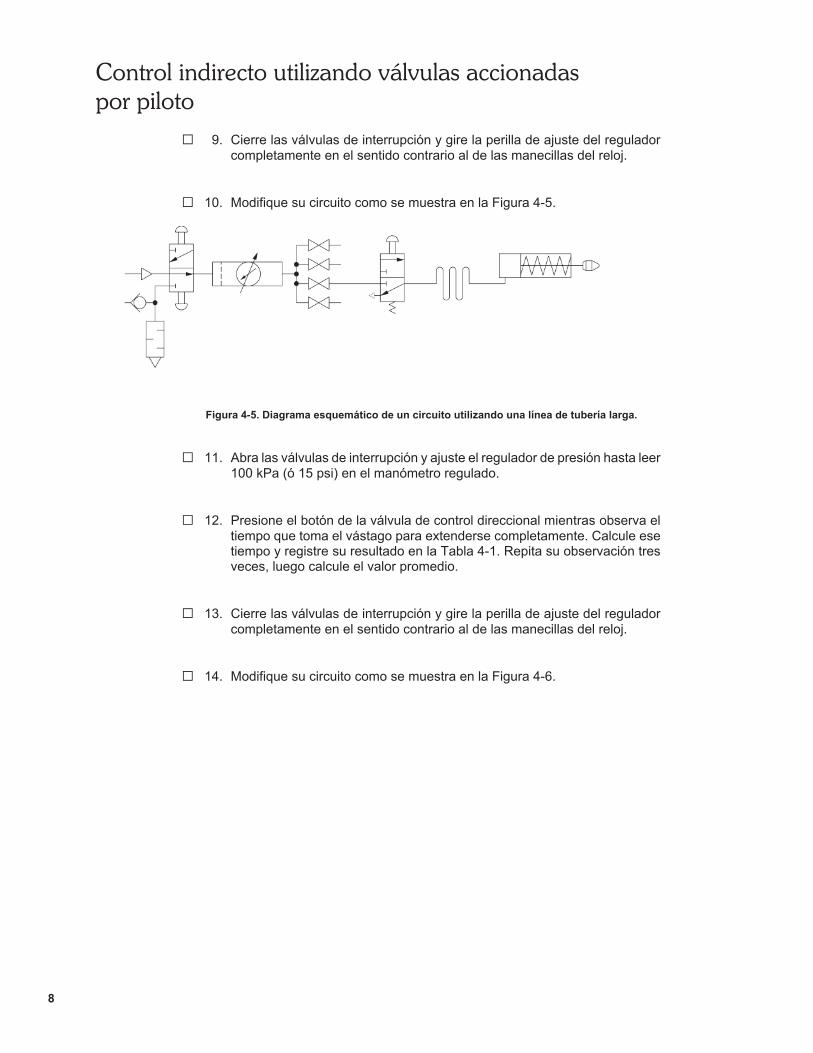
G 10. Modifique su circuito como se muestra en la Figura 4-5.
Figura 4-5. Diagrama esquemático de un circuito utilizando una línea de tubería larga.
G 11. Abra las válvulas de interrupción y ajuste el regulador de presión hasta leer100 kPa (ó 15 psi) en el manómetro regulado.
G 12. Presione el botón de la válvula de control direccional mientras observa eltiempo que toma el vástago para extenderse completamente. Calcule esetiempo y registre su resultado en la Tabla 4-1. Repita su observación tresveces, luego calcule el valor promedio.
G 13. Cierre las válvulas de interrupción y gire la perilla de ajuste del reguladorcompletamente en el sentido contrario al de las manecillas del reloj.
G 14. Modifique su circuito como se muestra en la Figura 4-6.
Control indirecto utilizando válvulas accionadaspor piloto
9
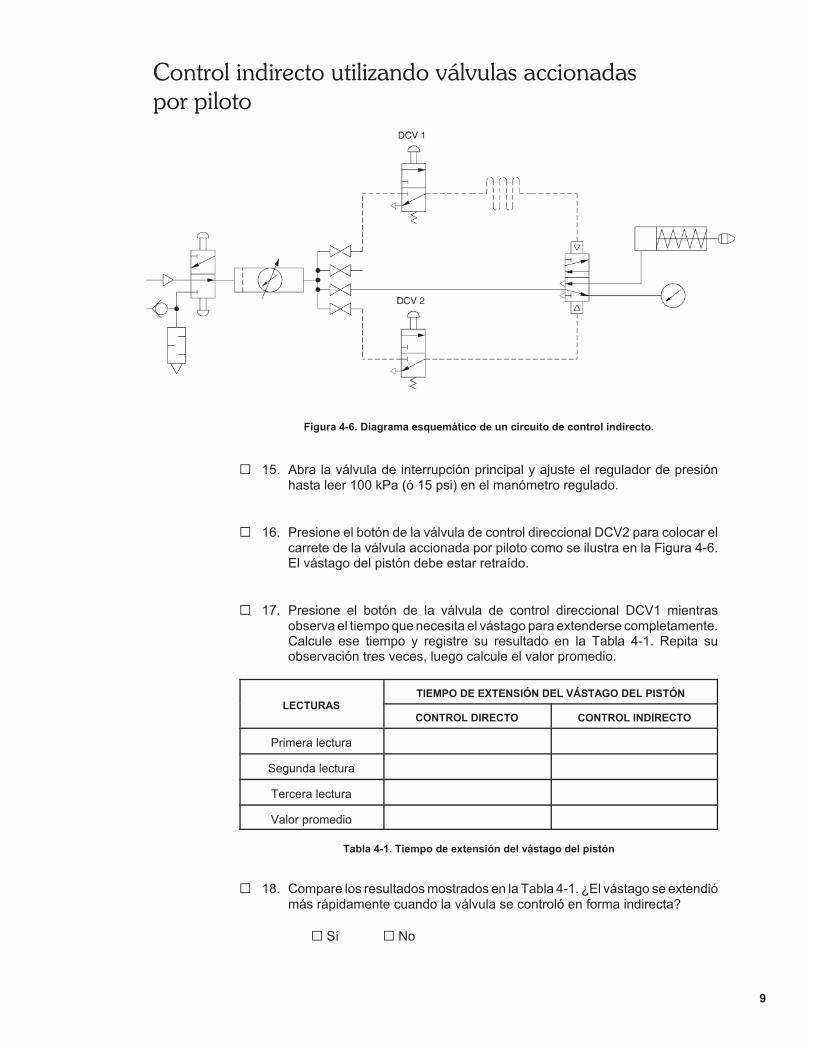
Figura 4-6. Diagrama esquemático de un circuito de control indirecto.
G 15. Abra la válvula de interrupción principal y ajuste el regulador de presiónhasta leer 100 kPa (ó 15 psi) en el manómetro regulado.
G 16. Presione el botón de la válvula de control direccional DCV2 para colocar elcarrete de la válvula accionada por piloto como se ilustra en la Figura 4-6.El vástago del pistón debe estar retraído.
G 17. Presione el botón de la válvula de control direccional DCV1 mientrasobserva el tiempo que necesita el vástago para extenderse completamente.Calcule ese tiempo y registre su resultado en la Tabla 4-1. Repita suobservación tres veces, luego calcule el valor promedio.
LECTURASTIEMPO DE EXTENSIÓN DEL VÁSTAGO DEL PISTÓN
CONTROL DIRECTO CONTROL INDIRECTO
Primera lectura
Segunda lectura
Tercera lectura
Valor promedio
Tabla 4-1. Tiempo de extensión del vástago del pistón
G 18. Compare los resultados mostrados en la Tabla 4-1. ¿El vástago se extendiómás rápidamente cuando la válvula se controló en forma indirecta?
G Sí G No
Control indirecto utilizando válvulas accionadaspor piloto
10
G 19. En vista de que se utilizó el mismo conducto largo para proporcionarlepotencia primero al cilindro y luego al piloto de la válvula de controldireccional, ¿qué se puede concluir?
G 20. ¿El vástago del pistón se retrae cuando se libera el botón de la válvula decontrol direccional DCV1? Explique por qué.
G 21. En la unidad de acondicionamiento, cierre las válvulas de interrupción y girela perilla de ajuste del regulador completamente en el sentido contrario alde las manecillas del reloj. Debe leer 0 kPa (ó 0 psi) en el manómetroregulado.
G 22. Desconecte y almacene toda la tubería y componentes.
CONCLUSIÓN
En este ejercicio, verificó la operación de una válvula de control direccionalaccionada por piloto de 4 vías, 5 orificios y 2 posiciones. Pudo ver que la válvula conpiloto proporcionada con su equipo didáctico puede utilizarse para teledirigir losactuadores lineales y rotativos en dos direcciones.
Observó que cuando un orificio piloto se mantiene presurizado, la prioridad laconserva esa posición, aunque los otros orificios también se presuricen.
Además, pudo observar que los pilotos requieren un mínimo de presión y volumenpara desplazar el carrete en comparación con las presiones de trabajo, lo cualminimiza los retardos causados por la compresibilidad del aire y la fricción de laslíneas de tubería larga.
PREGUNTAS DE REVISIÓN
1. ¿Cuál es la principal ventaja de las válvulas accionadas por piloto sobre lasválvulas accionadas manualmente?
a. Requieren de alta presión para operar.b. Permiten la operación teledirigida de válvulas grandes.c. Pueden hacerse más chicas que otras válvulas.d. Pueden hacerse más grandes que otras válvulas.
Control indirecto utilizando válvulas accionadaspor piloto
11
2. ¿Cuál es la función de las válvulas accionadas por piloto de 4 vías?
a. Teledirigir los actuadores lineales en una dirección.b. Teledirigir los actuadores rotativos en una dirección.c. Teledirigir los actuadores lineales y rotativos en una dirección.d. Teledirigir los actuadores lineales y rotativos en dos direcciones.
3. ¿Cuál es la diferencia principal entre las válvulas accionadas por piloto y lasválvulas de control accionadas directamente?
a. Las válvulas de control accionadas por piloto son más pequeñas.b. La forma en que los carretes se desplazan.c. Las válvulas de control accionadas por piloto pueden trabajar en ambas
direcciones.d. Las válvulas de control accionadas por piloto no pueden ser de retroceso
por resorte.
4. ¿Cuál es la finalidad del comando manual en una válvula accionada por piloto?
a. Purgar el exceso del aire comprimido.b. Invertir la dirección de la válvula.c. Invertir la operación del piloto.d. Duplicar manualmente la operación de la válvula.
5. ¿Indique la razón por la cuál las válvulas accionadas por piloto doble puedenmemorizar una posición?
a. Necesitan una señal piloto para desplazar el carrete.b. No necesitan de una señal piloto para desplazar el carrete.c. Es una característica de la válvula accionada por piloto.d. Debido a que son teledirigidas.

Muestra extraída del
manual del estudiante
Control eléctrico de los
sistemas neumáticos

15
Ejercicio 3-1
Circuitos electroneumáticos básicos de memoria y prioridad
OBJETIVO DEL EJERCICIO
Mostrar cómo una válvula direccional puede memorizar una señal y manteneruna posición;Demostrar cómo cerrar y abrir los circuitos electroneumáticos;Describir la función y operación de los interruptores de fin de carrera.
DISCUSIÓN
Como ha observado en el Ejercicio 4-1 en el manual de Fundamentos de neumática,la falta de resortes de retorno, en las válvulas direccionales accionadas por pilotoneumático doble, permite mantener o memorizar la posición de la bobina sinmantener la presión piloto. Sin embargo, cuando un puerto piloto es mantenidopresurizado, la prioridad es mantenerlo en esa posición aunque el puerto sepresurice. El circuito debe liberar un piloto antes de que otro piloto pueda desviar labobina.
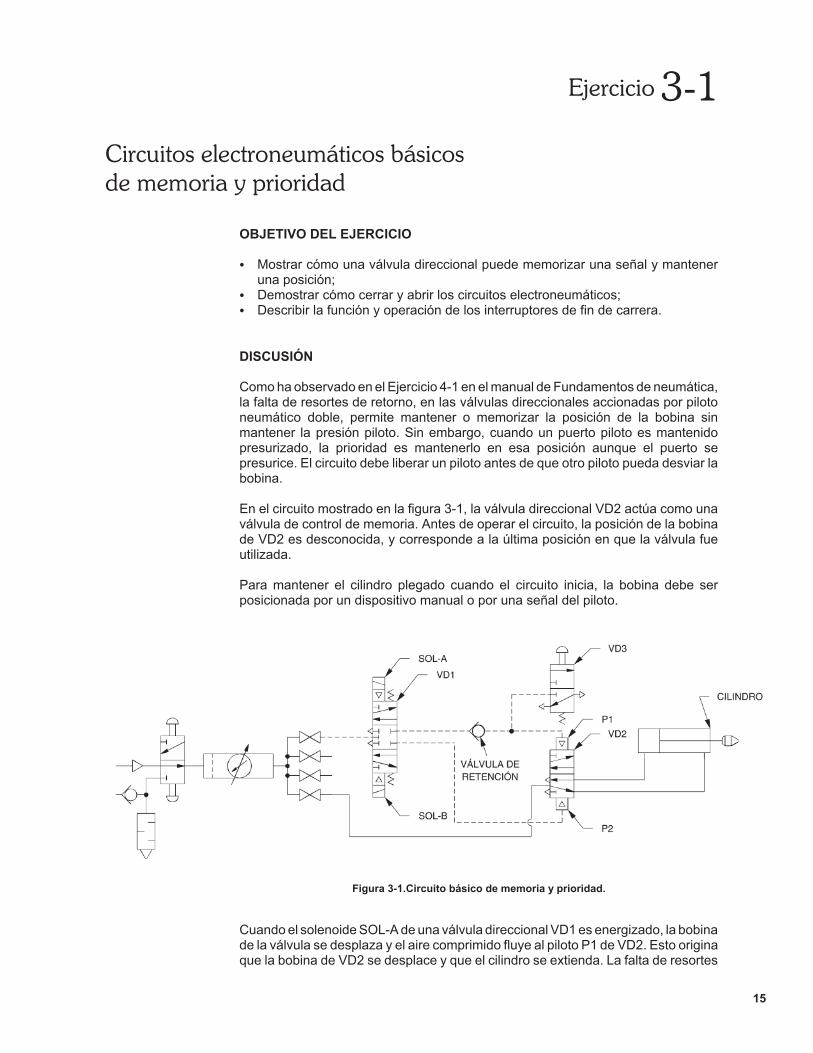
En el circuito mostrado en la figura 3-1, la válvula direccional VD2 actúa como unaválvula de control de memoria. Antes de operar el circuito, la posición de la bobinade VD2 es desconocida, y corresponde a la última posición en que la válvula fueutilizada.
Para mantener el cilindro plegado cuando el circuito inicia, la bobina debe serposicionada por un dispositivo manual o por una señal del piloto.
Figura 3-1.Circuito básico de memoria y prioridad.
Cuando el solenoide SOL-A de una válvula direccional VD1 es energizado, la bobinade la válvula se desplaza y el aire comprimido fluye al piloto P1 de VD2. Esto originaque la bobina de VD2 se desplace y que el cilindro se extienda. La falta de resortes
Circuitos electroneumáticos básicosde memoria y prioridad
16
de retorno origina que VD2 memorice y mantenga su posición de manera que elcilindro continuará extendiéndose y permanecerá extendido aunque SOL-A seadesenergizado.
Cuando el solenoide VD1-SOL-B es energizado para retractar el cilindro, el airecomprimido fluye al piloto de VD2 pero la bobina de VD2 no se desplaza. Estábloqueado por el aire comprimido, el cual es atrapado por la válvula de retención enla línea piloto de P1. La válvula direccional VD3 es después utilizada para purgar elaire comprimido.
Debido a que la retracción del cilindro debe ser confirmada por un segundocomando (VD3), esta clase de circuito frecuentemente es utilizado para preveniroperaciones no deseadas. La operación de este circuito obturado por aire es similaral circuito de enclavamiento mostrado en la figura 2-19 en el Ejercicio 2-3 donde esnecesario para liberar el botón pulsador de PARO, como un segundo comando,antes de energizar el solenoide opuesto.
Interruptores de fin de carrera
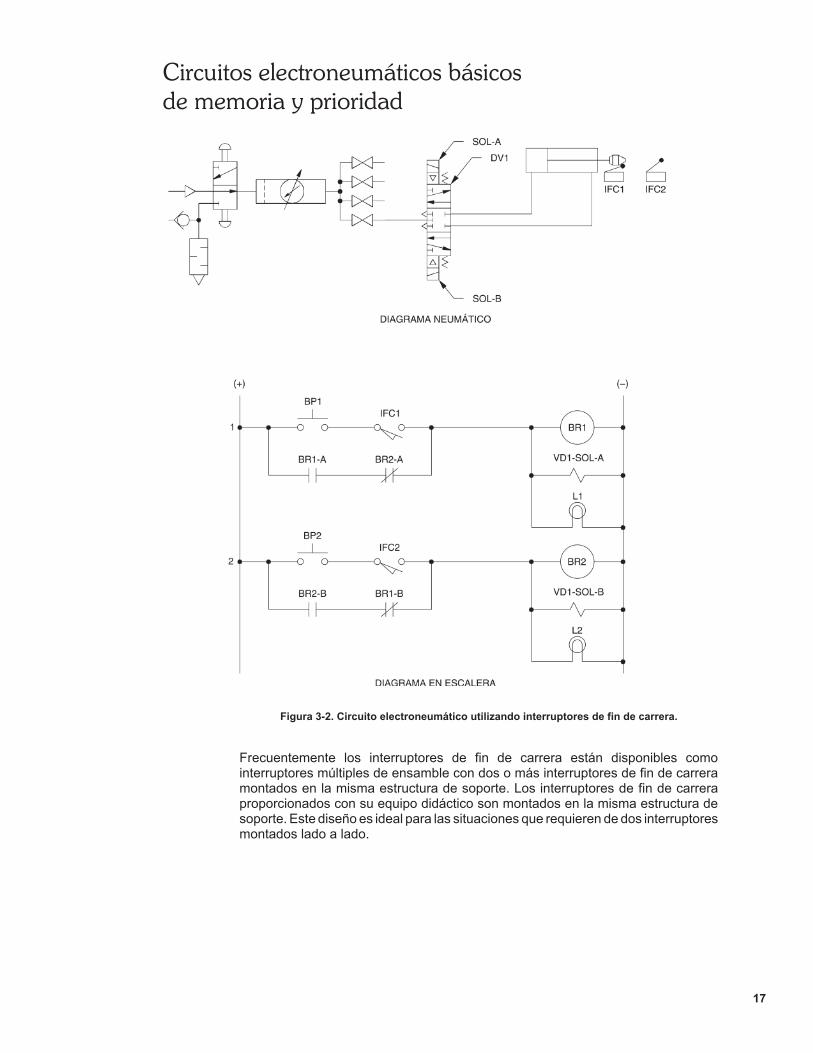
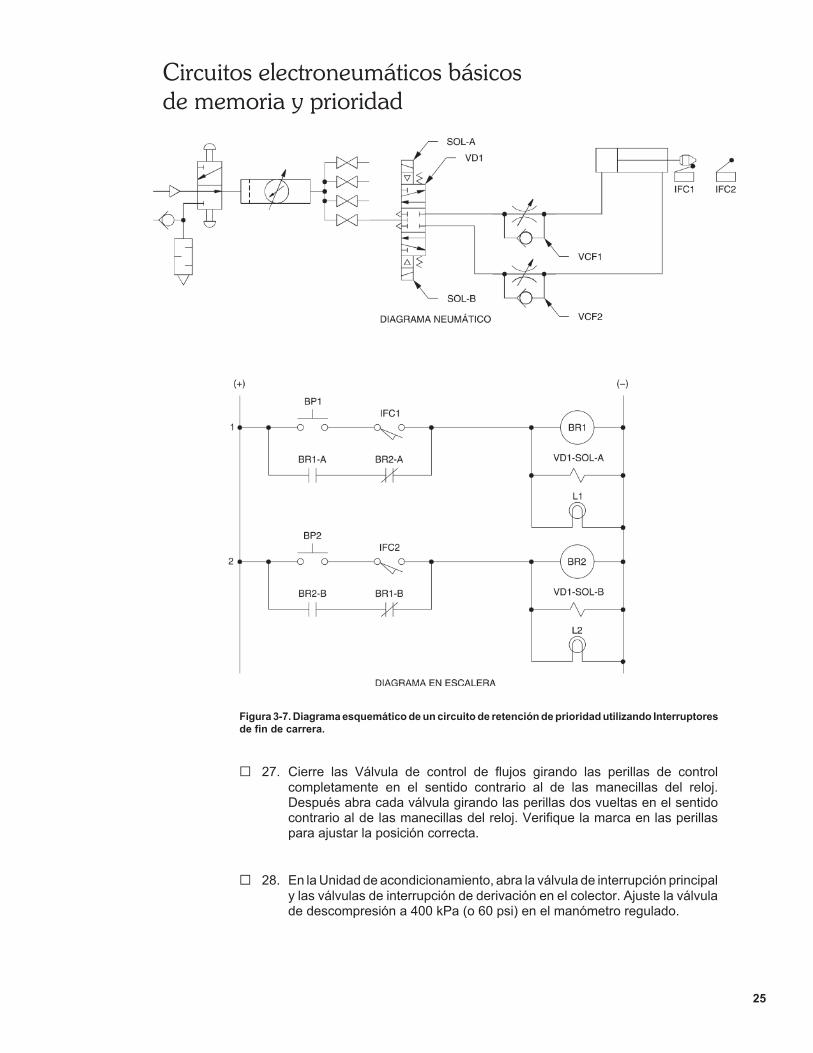
Un comando también puede ser confirmado utilizando la señal eléctricaproporcionada por dispositivos de sensación, los cuales detectan la posición delvástago del cilindro. Como ejemplo, el comando de retracción del vástago delcilindro mostrado en la figura 3-2, no podría ser ejecutado por BP2 si el vástago noes extendido completamente y su posición confirmada por el interruptor de fin decarrera IFC2. Cuando IFC2 es activado mecánicamente por la presencia delvástago, su contacto NA se cierra, y por lo tanto es posible energizar BR2 utilizandoBP2. Energizando la bobina de relé CR2 causa que el contacto NC CR2-A se abray la bobina de relé BR1 para desenergice.
Los interruptores de fin de carrera son muy utilizados en el equipo neumáticoindustrial. Son confiables, pequeños en tamaño, simples de utilizar, y generalmentemás barato que otra clase de interruptores. Un interruptor de fin de carrera constade un actuador y uno o más juegos de contactos NA y NC. Es activado cuando unaparte en movimiento, tal como un vástago del cilindro o un miembro de máquina,golpea el mecanismo actuador, desplazando los contactos a su estado activado.
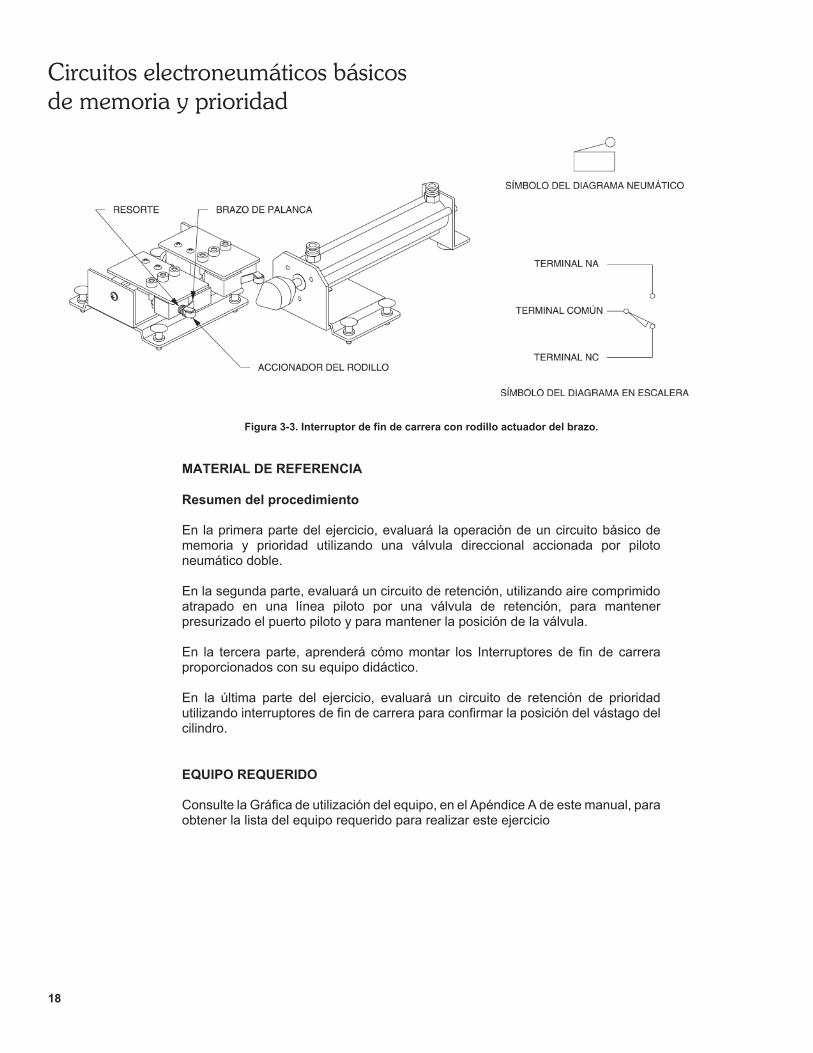
La figura 3-3 muestra el interruptores de fin de carrera suministrados con su equipodidáctico. Cada interruptor tiene un actuador de tipo cilíndrico y un juego decontactos UPDV. Cuando la punta del cilindro se desplaza por uno de losinterruptores, este empuja contra el rodillo, liberando el brazo de palanca. El brazode palanca actúa en un pulsador interno, originando que los contactos UPDV seactiven. El contacto NA se cierra mientras que el contacto NC se abre. Cuando lapunta del cilindro se aleja del actuador del rodillo, un resorte regresa el brazo depalanca y los contactos a su condición normal.
Circuitos electroneumáticos básicosde memoria y prioridad
17
Figura 3-2. Circuito electroneumático utilizando interruptores de fin de carrera.
Frecuentemente los interruptores de fin de carrera están disponibles comointerruptores múltiples de ensamble con dos o más interruptores de fin de carreramontados en la misma estructura de soporte. Los interruptores de fin de carreraproporcionados con su equipo didáctico son montados en la misma estructura desoporte. Este diseño es ideal para las situaciones que requieren de dos interruptoresmontados lado a lado.
Circuitos electroneumáticos básicosde memoria y prioridad
18
Figura 3-3. Interruptor de fin de carrera con rodillo actuador del brazo.
MATERIAL DE REFERENCIA
Resumen del procedimiento
En la primera parte del ejercicio, evaluará la operación de un circuito básico dememoria y prioridad utilizando una válvula direccional accionada por pilotoneumático doble.
En la segunda parte, evaluará un circuito de retención, utilizando aire comprimidoatrapado en una línea piloto por una válvula de retención, para mantenerpresurizado el puerto piloto y para mantener la posición de la válvula.
En la tercera parte, aprenderá cómo montar los Interruptores de fin de carreraproporcionados con su equipo didáctico.
En la última parte del ejercicio, evaluará un circuito de retención de prioridadutilizando interruptores de fin de carrera para confirmar la posición del vástago delcilindro.
EQUIPO REQUERIDO
Consulte la Gráfica de utilización del equipo, en el Apéndice A de este manual, paraobtener la lista del equipo requerido para realizar este ejercicio
Circuitos electroneumáticos básicosde memoria y prioridad
19
PROCEDIMIENTO
Circuito básico de memoria y prioridad
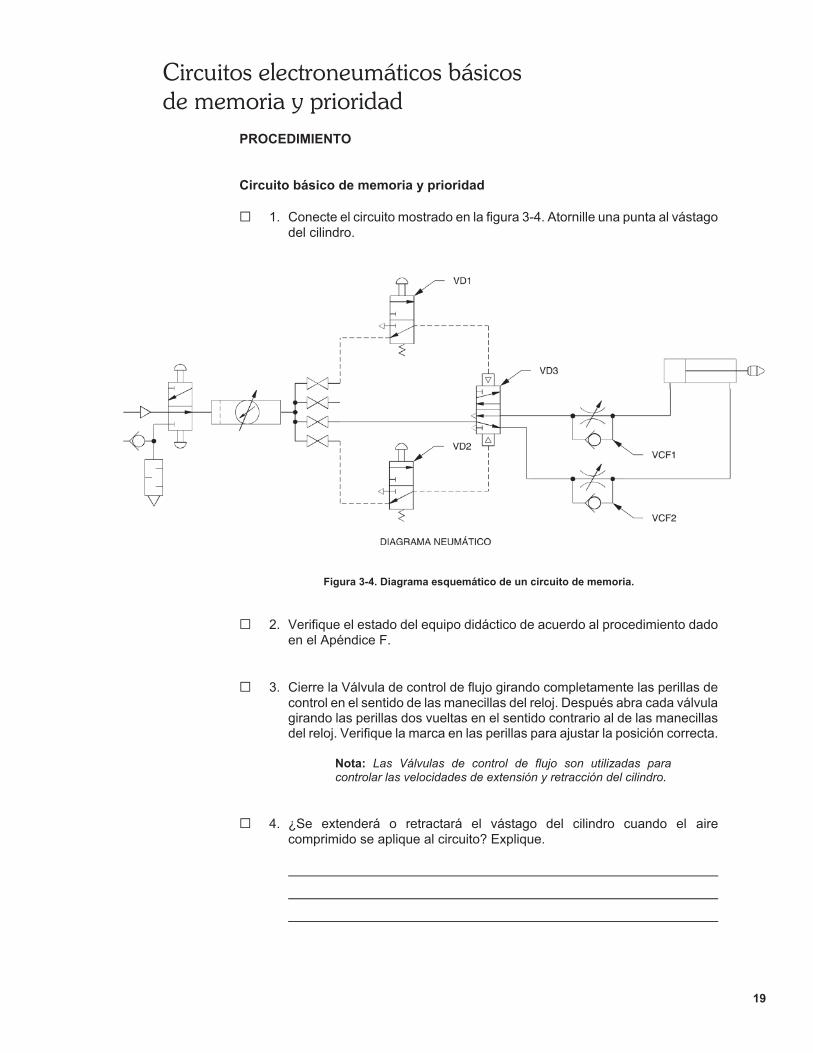
G 1. Conecte el circuito mostrado en la figura 3-4. Atornille una punta al vástagodel cilindro.
Figura 3-4. Diagrama esquemático de un circuito de memoria.
G 2. Verifique el estado del equipo didáctico de acuerdo al procedimiento dadoen el Apéndice F.
G 3. Cierre la Válvula de control de flujo girando completamente las perillas decontrol en el sentido de las manecillas del reloj. Después abra cada válvulagirando las perillas dos vueltas en el sentido contrario al de las manecillasdel reloj. Verifique la marca en las perillas para ajustar la posición correcta.
Nota: Las Válvulas de control de flujo son utilizadas paracontrolar las velocidades de extensión y retracción del cilindro.
G 4. ¿Se extenderá o retractará el vástago del cilindro cuando el airecomprimido se aplique al circuito? Explique.
Circuitos electroneumáticos básicosde memoria y prioridad
20
G 5. En la Unidad de acondicionamiento, abra la válvula de interrupción principaly las válvulas de charnela de derivación del colector. Ajuste la válvula dedescompresión a 400 kPa (o 60 psi) en el manómetro regulado.
G 6. Si es necesario, libere el botón de control de la válvula direccional VD2 pararetractar el vástago del cilindro.
G 7. Libere el botón de control de la válvula direccional VD1. ¿Se extiende elvástago del cilindro?
G 8. Libere el botón de control de la válvula direccional VD1 y mantenga estaposición. Con su otra mano, libere el botón de control de VD2. ¿Se retractael vástago del cilindro? Explique por qué.
G 9. ¿Confirma la operación del circuito que la prioridad puede ser mantenidaen una posición cuando el puerto piloto permanece presurizado?
G Sí G No
G 10. En la unidad de acondicionamiento, cierre las válvulas de interrupción, ygire la perilla de ajuste del regulador completamente en el sentido contrarioal de las manecillas del reloj.
Circuito de retención de prioridad
G 11. Conecte el circuito de retención de prioridad mostrado en la figura 3-5.Utilice una válvula de control de flujo cerrada (gire la perilla de controlcompletamente en el sentido contrario al de las manecillas del reloj) comoválvula de retención en la línea piloto de P1. Asegúrese que el vástago delcilindro esté plegado. Atornille una punta al vástago del cilindro.
Circuitos electroneumáticos básicosde memoria y prioridad
21
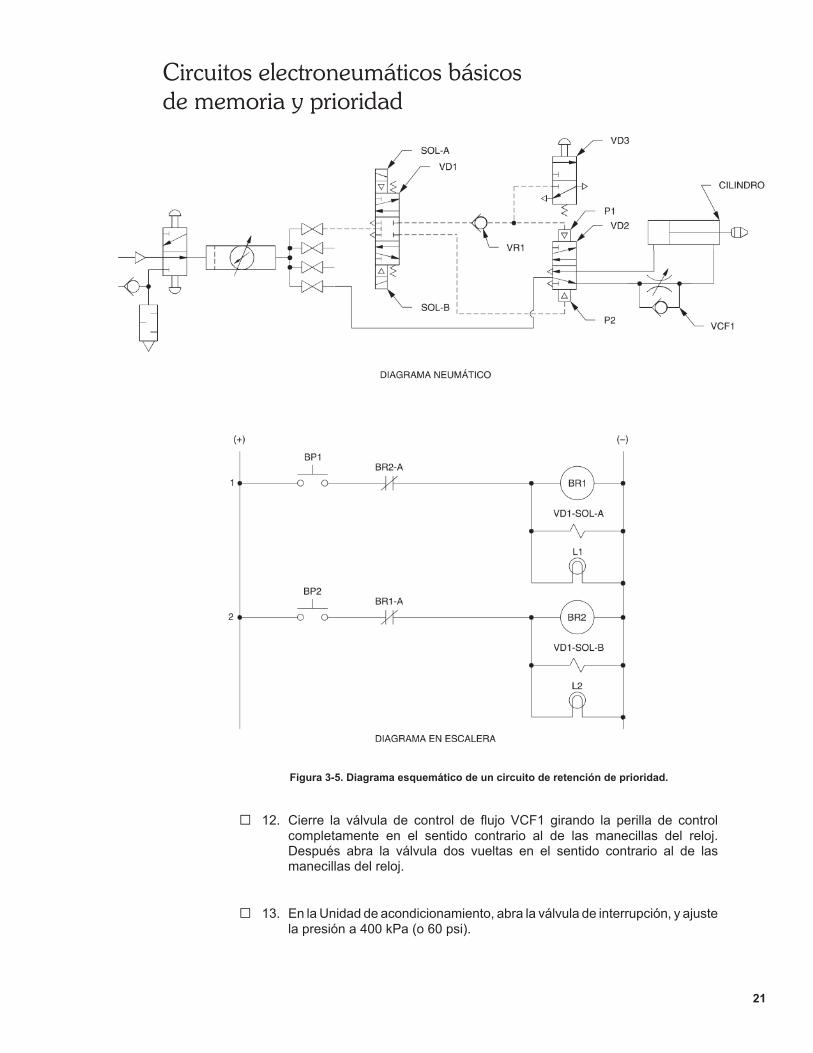
Figura 3-5. Diagrama esquemático de un circuito de retención de prioridad.
G 12. Cierre la válvula de control de flujo VCF1 girando la perilla de controlcompletamente en el sentido contrario al de las manecillas del reloj.Después abra la válvula dos vueltas en el sentido contrario al de lasmanecillas del reloj.
G 13. En la Unidad de acondicionamiento, abra la válvula de interrupción, y ajustela presión a 400 kPa (o 60 psi).
Circuitos electroneumáticos básicosde memoria y prioridad
22
G 14. Active la Fuente de alimentación cc.
G 15. Si el vástago del cilindro se extiende cuando aplica la presión en el circuito,libere simultáneamente el BP2 y el botón de control de la válvula direccionalVD3 para retractar el vástago del cilindro.
G 16. Libere el botón pulsadorBP1. ¿Se extiende el vástago del cilindro?
G Sí G No
G 17. Libere el botón pulsador BP2. ¿Se retracta el vástago del cilindro? Si no,explique.
G 18. Libere simultáneamente el botón pulsadorBP2 y el botón de control de laválvula direccional VD3. ¿Se retracta el vástago del cilindro?
G Sí G No
G 19. ¿Confirma la operación del circuito que la prioridad es mantenida en unaposición cuando el puerto piloto permanece presurizado?
G Sí G No
G 20. Explique cómo el circuito operará si la válvula de retención es removida delcircuito.
G 21. En la Unidad de acondicionamiento, cierre la válvula de charnela y gire laperilla de ajuste del regulador completamente en el sentido contrario al delas manecillas del reloj.
G 22. Active la Fuente de alimentación cc.
Circuitos electroneumáticos básicosde memoria y prioridad
23
Montaje del Interruptores de fin de carrera
G 23. Remueva todos los componentes excepto el Cilindro de doble acción de susuperficie de trabajo.
G 24. Monte el interruptor de fin de carrera como se indica en los siguientespasos:
Atornille la punta del cilindro sobre el extremo del vástago del cilindro.
Extienda manualmente el vástago del cilindro en su totalidad.
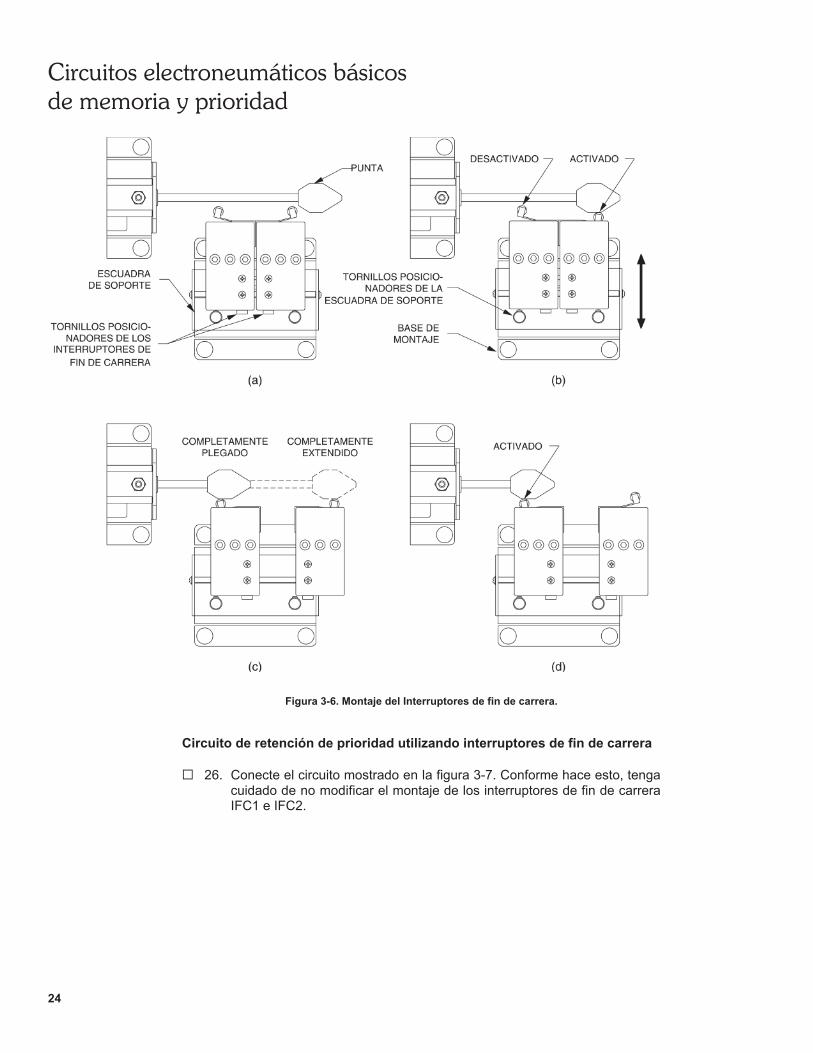
Fije el Interruptores de fin de carrera junto al vástago del cilindro comose muestra en la figura 3-6.
Afloje los tornillos de posicionamiento del interruptor de fin de carrera.Coloque los interruptores lado a lado al centro de la escuadra desoporte, como se muestra en la figura 3-6 (a). Ajuste los tornillos deposicionamiento del interruptor de fin de carrera.
Afloje los tornillos de posicionamiento de la escuadra de soporte hastaque pueda deslizar la escuadra sobre la base de montaje como semuestra en la figura 3-6 (b). Ajuste la posición de la escuadra demanera que los interruptores sean activados cuando la punta de cilindroempuje contra el brazo del interruptor y desactivados cuando la puntadel cilindro libere el brazo del interruptor. Para evaluar esto, extienda yretracte manualmente el vástago del cilindro, y escuche el “click”.Después, ajuste los tornillos de posicionamiento de la escuadra desoporte en la base de montaje.
Afloje el tornillo de posicionamiento en cada interruptor de fin decarrera. Ajuste la posición de los interruptores de manera que seanactivados cuando el vástago del cilindro sea extendido y plegadocompletamente, como se muestra en la figura 3-6 (c). Para evaluaresto, extienda y retracte manualmente el vástago del cilindro, y escucheel click. Después, ajuste los tornillos de posicionamiento del interruptorde fin de carrera.
Retracte completamente el vástago del cilindro, como se muestra en lafigura 3-6 (d).
G 25. Sus interruptores de fin de carrera están ahora preparados para detectar lasposiciones totalmente extendidas y plegadas del vástago del cilindro.
Circuitos electroneumáticos básicosde memoria y prioridad
24
Figura 3-6. Montaje del Interruptores de fin de carrera.
Circuito de retención de prioridad utilizando interruptores de fin de carrera
G 26. Conecte el circuito mostrado en la figura 3-7. Conforme hace esto, tengacuidado de no modificar el montaje de los interruptores de fin de carreraIFC1 e IFC2.
Circuitos electroneumáticos básicosde memoria y prioridad
25
Figura 3-7. Diagrama esquemático de un circuito de retención de prioridad utilizando Interruptoresde fin de carrera.
G 27. Cierre las Válvula de control de flujos girando las perillas de controlcompletamente en el sentido contrario al de las manecillas del reloj.Después abra cada válvula girando las perillas dos vueltas en el sentidocontrario al de las manecillas del reloj. Verifique la marca en las perillaspara ajustar la posición correcta.
G 28. En la Unidad de acondicionamiento, abra la válvula de interrupción principaly las válvulas de interrupción de derivación en el colector. Ajuste la válvulade descompresión a 400 kPa (o 60 psi) en el manómetro regulado.
Circuitos electroneumáticos básicosde memoria y prioridad
26
G 29. Active la Fuente de alimentación cc.
G 30. Libere el botón pulsador BP1. ¿Se extiende el vástago del cilindro?
G Sí G No
G 31. Libere el botón pulsador BP2. ¿Se retracta el vástago del cilindro?
G Sí G No
G 32. Afloje el tornillo de posicionamiento del interruptor de fin de carrera el cualdetecta la posición totalmente extendida y detiene el interruptor de fin decarrera.
G 33. Libere el botón pulsador BP1 para extender el vástago del cilindro, despuéslibere el botón pulsador BP2. ¿Se retracta el vástago del cilindro? Si no,explíquelo consultando el diagrama en escalera.
G 34. ¿Confirma la operación del circuito que el interruptor de fin de carrera debeconfirmar la posición del vástago del cilindro para permitir que la bobina dela válvula direccional VD1 sea desplazada?
G Sí G No
G 35. En la Unidad de acondicionamiento, cierre las válvulas de interrupción, ygire la perilla de ajuste del regulador completamente en el sentido contrarioal de las manecillas del reloj.
G 36. Desactive la Fuente de alimentación cc.
G 37. Desconecte y almacene todos los cables de conexión y componentes.
CONCLUSIÓN
En este ejercicio, aprendió cómo la prioridad puede ser determinada y mantenidaen un circuito neumático, utilizando una válvula direccional accionada por pilotoneumático doble.
Evaluó un circuito de retención utilizando aire comprimido atrapado en una líneapiloto. Observó que el circuito debe liberar un piloto antes de que otro piloto pueda
Circuitos electroneumáticos básicosde memoria y prioridad
27
desviar la bobina. Observó que el circuito permanece retenido aunque elabastecedor de aire comprimido descienda.
Aprendió cómo montar el Interruptores de fin de carrera proporcionado con suequipo didáctico.
Evaluó un circuito de enclavamiento el cual necesita un comando de confirmación,suministrado por un interruptor de fin de carrera para permitir que una nuevasecuencia inicie.
PREGUNTAS DE REPASO
1. ¿Cuál es el propósito de la válvula direccional VD3 en la figura 3-5?
2. ¿Qué cuidado debe tener antes de desplazar la bobina de una válvuladireccional accionada por piloto neumático doble?
3. ¿Cuál es el propósito de un interruptor de fin de carrera en un circuitoelectroneumático?
4. ¿Qué característica de una válvula direccional accionada por piloto neumáticodoble permite mantener o memorizar la posición de la válvula sin mantener lapresión del piloto?
5. ¿Cuál es el propósito de los contactos CR1-A y CR2-A en el diagrama enescalera de la figura 3-7?

Otra muestra extraída del
manual del estudiante
Fundamentos de neumática

31
Examen de la unidad
1. ¿Qué se puede hacer para que una válvula de 4 vías actúe como una de 3vías?
a. Obstruir un orificio.b. Obstruir dos orificios.c. Obstruir un orificio de entrada y otro de salida.d. Obstruir dos orificios de salida.
2. Bloquear un motor neumático
a. es peligroso.b. no causa daño.c. causa un incremento de presión.d. es imposible.
3. Las cubiertas y los carretes de las válvulas accionadas por piloto
a. son similares a aquellos de las válvulas accionadas directamente.. b. son diferentes de aquellos de las válvulas accionadas directamente.
c. son más pequeños que aquellos de las válvulas accionadas directamente.d. son más grandes que aquellos de las válvulas accionadas directamente.
4. Las válvulas accionadas por piloto pueden mover sus carretes utilizando
a. un pedal.b. un botón pulsador.c. uno o dos pilotos, junto con un resorte de retroceso.d. una palanca.
5. Las válvulas accionadas por piloto reducen los retrasos causados por
a. los circuitos complejos.b. la compresibilidad del aire y la fricción en las líneas de tubería larga.c. los componentes conectados en serie.d. las líneas piloto de alta presión.
6. El desplazamiento de un motor neumático
a. es el volumen de aire necesario para que el eje del motor gire unarevolución completa.
b. es la cantidad de fuerza generada por el motor.c. es la resistencia del motor para girar una revolución completa.d. es la velocidad dividida por el caudal.

Examen de la unidad (continuación)
32
7. ¿Qué causa que la velocidad real del motor sea menor que la velocidad teórica?
a. La fricción.b. Las fugas internas y la compresibilidad del aire.c. La carga.d. La pérdida de presión.
8. Una válvula de control direccional de 4 vías, 5 orificios y 2 posiciones accionadapor doble piloto
a. no tiene orificios para liberar el aire.b. tiene un orificio para liberar el aire de la configuración de la trayectoria del
flujo.c. tiene dos orificios para liberar el aire de la configuración de la trayectoria del
flujo.d. Depende del circuito.
9. El par desarrollado en el eje del motor multiplicado por la velocidad es igual
a. a la fuerza.b. al desplazamiento.c. a la potencia de salida.d. a la potencia del par.
10. Un motor neumático no entregará ningún par si
a. no existe carga.b. la carga excede la potencia de salida del motor.c. la velocidad del motor es baja.d. la presión excede el 65% de la presión del sistema.
Muestra extraída de la
guía del profesor
Control eléctrico de
los sistemas neumáticos

Control eléctrico de los sistemas neumáticos
35
UNIDAD 4 APLICACIONES INDUSTRIALES
EJERCICIO 4-1 CIRCUITOS DE DESACELERACIÓN DELACTUADOR NEUMÁTICO
RESPUESTAS A LAS PREGUNTAS DEL PROCEDIMIENTO
G 10. Cuando el vástago está en la posición completamente plegado, IFC1 esactuado. El contacto IFC1 NA y IFC2 NC están cerrados. El presionar BP1causa que VD1-SOL-A se energice y que el vástago del cilindro seextienda.
G 11. No. La válvula de control de flujo VCF1 está completamente abierta y norestringe el flujo del aire para desacelerar el vástago del cilindro.
G 14. Si. El aire expedido del extremo del vástago del cilindro es restringido porVCF1 y la velocidad de extensión es desacelerada.
G 15. Por la válvula de retención de paso de la válvula de control de flujo VCF1.
G 16. El vástago del cilindro no desarrollará una extensión completa y el sistemase detendrá si el vástago no alcanza IFC2.
G 25. Cuando el botón pulsador BP1 START es presionado la bobina de relé BR1es energizada. Esto causa que el contacto BR1-B NA se cierre, que VD1-SOL-A se energice y que el motor empiece a rotar.
G 26. No. El flujo de aire es bloqueado por la válvula de retención VR1 en unadirección.
G 27. Cuando el botón pulsador BP3 BRAKE es presionado, la bobina de reléBR2 es energizada. Esto causa que BR1 sea desenergizado. Esto tambiéncausa que la bobina de VD1 se desplace y que el motor se pare.
G 29. Cuando el botón pulsador BP2 STOP es presionado, la bobina de relé BR1es desenergizada y la bobina de VD1 regresa a su posición central. Estocausa que el motor deje de rotar. El motor actúa como una bomba de vacíomientras se desacelera.
Control eléctrico de los sistemas neumáticos
36
RESPUESTAS A LAS PREGUNTAS DEL REPASO
1. La válvula de retención es usada para permitir la retracción o plegamiento delvástago del cilindro a toda velocidad.
2. El grado de amortiguación puede ser ajustado con la válvula de aguja.
3. El vástago del cilindro se extiende a toda velocidad hasta que el dispositivosensor detecta la presencia del vástago. Aquí, el aire expedido del extremo delvástago del cilindro es redirigido a través de una válvula de control de flujo querestringe el flujo.
4. Un motor neumático bidireccional puede ser detenido sin arrastrar un vacío,usando una configuración particular central de la válvula direccional como semuestra en la Figura 4-5.
5. Debido a la compresibilidad del aire.
EJERCICIO 4-2 CONTEO DE CICLOS DEL ACTUADOR
RESPUESTAS A LAS PREGUNTAS DEL PROCEDIMIENTO
G 4. El conteo de la visualización debe ser 000.
G 5. El conteo visualizado es incrementado por uno. Al presionar BP1momentaneamente cambia la entrada CONTROL del contador a común.Esto activa la entrada CONTROL e incrementa el valor del contador poruno.
G 6. La lámpara piloto L1 debe activarse. Cuando el contador alcance el valorpresente, los contactos de salida del contador son cambiados a su estadoactivo. Esto causa que CT1-A se cierre energizando L1.
G 7. Si.
G 8. El conteo visualizado regresa a cero y la lámpara piloto L1 debedesactivarse. Al presionar el botón reset momentaneamente cambia laentrada RESET del contador a común. Esto restablece el conteo a cero ydesactiva CT1-A, desenergizando L1.
G 9. El conteo de visualización es incrementado después que BP1 es liberado.
G 10. Si.
Control eléctrico de los sistemas neumáticos
37
G 18. Si.
G 19. Cuando el botón pulsador BP1 START es presionado, se permite fluir a lacorriente para energizar la bobina de relé BR1 y SOL-A de la válvuladireccional VD1. Esto causa que la bobina de VD1 se desplace y que elvástago del cilindro se extienda.
G 20. Energizar la bobina de relé BR1 causa que el contacto BR1-C en el escalón3 se cierre. La entrada COMÚN del contador es entonces conectada acomún y el valor del conteo aumenta por uno.
G 21. Si. Esto es porque cuando el cilindro completa su quinta carrera deextensión, el valor del conteo del contador CT1 alcanza el valor preajustadode 5,el cual activa los contactos de relé del contador. Esto causa que elcontacto CT1-B NA en el escalón 3 se cierre, conectando la entrada RESET(R) del contador en común y causando que el contador CT1 restablezca suconteo a cero.
G 22. Si.
G 23. Si. Al presionar el botón pulsador BP3 STOP causa que la bobina relé BR2se desenergice. Esto causa que el contacto de retención BR2-A se abra.Cuando el cilindro es creado en el escalón 1 y el cilindro se detiene.
G 24. El vástago del cilindro no se extiende. El botón pulsador BP1 START creauna condición de circuito abierto en el escalón 1. Esto evita que VD1-SOL-Ay BR1 se energicen para empezar la extensión del cilindro.
G 29. Si.
G 30. Si.
G 40. Velocidad del motor: 2000 ±500 r/min
G 41. Si.
RESPUESTAS A LAS PREGUNTAS DEL REPASO
1. Los contadores eléctricos son usados para contar las cantidades producidasdurante el proceso y control de la operación. También son usados para laplaneación del mantenimiento de las máquinas controlando el número deoperaciones de las máquinas.
Control eléctrico de los sistemas neumáticos
38
2. Cada vez que un impulso es recibido en la terminal de control, el conteo delcontador es aumentado por uno. Cuando el conteo preajustado es alcanzado,el contador activa sus contactos de salida. Entradas adicionales continuanincrementando el conteo. La activación momentánea de la entrada resetdesactiva los contactos del contador y restablece el contador a cero.
3. El valor preajustado es el conteo que el contador debe alcanzar antes de activarsus contactos de salida.
4. Si.
5. El valor del contador puede ser regresado a cero activando momentaneamentela entrada reset del contador.
EJERCICIO 4-3 SISTEMA DE TALADRADO INDUSTRIAL YCIRCUITOS DE SEGURIDAD
RESPUESTAS A LAS PREGUNTAS DEL PROCEDIMIENTO
G 8. Si.
G 10. Cuando el botón pulsador BP1START es presionado, la corriente espermitida fluir a través del escalón 1 de la escalera para energizar la bobinade relé BR1. VD1-SOL-A es energizada. Esto desplaza la válvula causandoque el cilindro abrazadera se extienda y que la unidad de taladro neumáticogire.
G 11. Cuando el cilindro abrazadera se extiende completamente, la presión seeleva rapidamente detrás de su pistón. Cuando alcanza la actuación de600 kPa (80 psi), activa el presostato PS1, causando que el contacto PS1NA en el escalón 1 se cierre. VD2-SOL-A y desplaza la bobina de la válvulay el cilindro de taladro se extiende.
G 12. Cuando el cilindro de taladro se extiende completamente, activa elinterruptor fotoeléctrico con reflexión difusa IF1. Esto causa que el contactoPC1 NC en el escalón 1 se abra, desenergizando la bobina de relé BR1.Esto causa que VD2-SOL-A se desenergice y el cilindro de taladro sepliegue. VD1-SOL-A es también desenergizado pero la bobina de VD3 nose desplaza. Por lo que el motor neumático continua rotando.
G 13. Cuando the cilindro de taladro se pliega completamente, activa el interruptormagnético de proximidad IMP2. Esto causa que el contacto IMP2 NC en elescalón 2 se abra. Esto desenergiza la bobina de relé BR2 causando queVD1-SOL-B se energice y la bobina de VD1 se desplace. Esto causa queel motor neumático se pare y el cilindro abrazadera se pliegue a todavelocidad.
Control eléctrico de los sistemas neumáticos
39
G 20. No.
G 21. No.
G 22. El vástago del cilindro se extiende.
G 23. Si.
G 24. El vástago del cilindro inmediatamente se pliega.
G 25. Si. Podría operar el circuito del cilindro simplemente presionando el otrobotón pulsador, BP2
G 31. Si.
G 32. El vástago del cilindro no se extiende. Presionando el botón pulsador BP1causa que la bobina de relé BR1 se energice, abriendo el contacto BR1-By cerrando el contacto BR1-A. Como el contacto BR2-B está cerrado, estotambién causa que el cronometrador TD1 empiece el conteo. 1 segundodespués, los contactos de relé TD1-A y TD1-B se abre desenergizando labobina de relé BR1 y evitando que los contactos de relé BR1-A y BR1-B secierren para energizar el solenoide de la válvula SOL-A.
G 33. Si BP1 es presionado y después BP2 es presionado, el tiempo que puedetranscurrir entre los dos eventos antes que el cilindro deje de operar es eltiempo establecido en el relé temporizado. En este caso, 1 s.
G 34. No. Sujetando BP2 causaría que el cronometrador TD1 se energizara através del contacto BP2 NA y el contacto BR-1 NC en la condición decerrado. 1 segundo después, TD1 cambiaría sus contactos TD1-1A NC yTD1-B NC a la condición de abierto. Esto evitaría que las bobinas de reléBR1 y BR2 se energizaran y mantendría los contactos de relé BR1-A yBR2-A en la condición de abierto hasta que ambos botones pulsadoressean liberados.
RESPUESTAS A LAS PREGUNTAS DEL REPASO
1. El cilindro de taladro no se extenderá después de la extensión del cilindroabrazadera. La presión desarrollándose en el puerto neumático de PS1 seráinsuficiente para activar PS1.
2. Los botones pulsadores tienen que estar ubicados lo suficientemente separadosde manera que se requieran dos manos para operarlos.
Control eléctrico de los sistemas neumáticos
40
3. No, porque el operador no podría retractar o plegar instantaneamente el cilindrodurante su extensión si una situación peligrosa ocurriera.
4. Un circuito de seguridad de dos manos sin sujeción, es un circuito que requieredel uso de ambas manos para iniciar el circuito y que no puede ser sobrepuestosujetando uno de los botones pulsadores.
5. El vástago del cilindro no se extiende.
EJERCICIO 4-4 CIRCUITO DE SIMULACIÓN DE UNCOMPACTADOR DE BASURA
RESPUESTAS A LAS PREGUNTAS DEL PROCEDIMIENTO
G 1. Vea la siguiente página
Control eléctrico de los sistemas neumáticos
41
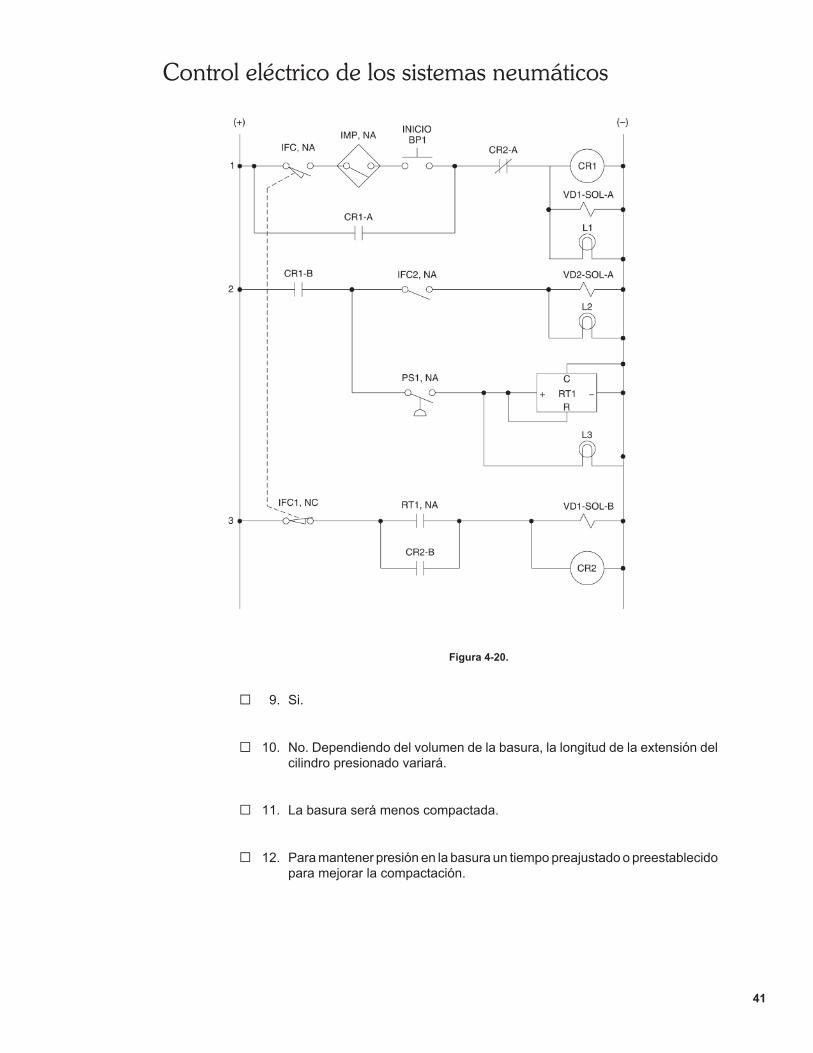
Figura 4-20.
G 9. Si.
G 10. No. Dependiendo del volumen de la basura, la longitud de la extensión delcilindro presionado variará.
G 11. La basura será menos compactada.
G 12. Para mantener presión en la basura un tiempo preajustado o preestablecidopara mejorar la compactación.
Control eléctrico de los sistemas neumáticos
42
RESPUESTAS A LAS PREGUNTAS DEL REPASO
1. El interruptor magnético de proximidad IMP1 es usado para confirmar laposición retractada del cilindro presionado.
2. La basura sería más compactada.
3. Una válvula de descompresión.
4. El circuito no inicia. El interruptor de fin de carrera IFC1 debe confirmar laposición plegada del cilindro de alimentación para operar el sistema.
5. IFC2.
RESPUESTAS A LA PRUEBA DE LA UNIDAD
1. b; 2. c; 3. a; 4. d; 5. b; 6. d; 7. a; 8. d; 9. c; 10. c.