Formalismo de Palatini y sus implicaciones en la teoría...
70
Máster en Física y Matemáticas Trabajo Fin de Máster Formalismo de Palatini y sus implicaciones en la teoría Einstein-Hilbert libre y acoplada Alejandro Jiménez Cano Julio de 2016 Tutor: Bert Janssen Departamento de Física Teórica y del Cosmos Universidad de Granada
Transcript of Formalismo de Palatini y sus implicaciones en la teoría...

Máster en Física y Matemáticas Trabajo Fin de Máster
Formalismo de Palatini y sus implicaciones en lateoría Einstein-Hilbert libre y acoplada
Alejandro Jiménez Cano
Julio de 2016
[Versión corregida 16/07/2016]
Tutor: Bert JanssenDepartamento de Física Teórica y del Cosmos
Universidad de Granada


DECLARACIÓN
En cumplimiento de la normativa aprobada en Consejo de Gobierno de 4 de marzo de 2013,sobre Directrices de la Universidad de Granada para el desarrollo de la asignatura "TrabajoFin de Máster" de sus títulos de máster (Art 8,4)
D. Alejandro Jiménez Cano
Asume la originalidad del trabajo fin de máster, entendida en el sentido de que no ha utilizadofuentes sin citarlas debidamente.
Granada, a 22 de junio de 2016.
Fdo.:


Formalismo de Palatini y sus implicaciones en lateoría Einstein-Hilbert libre y acoplada
Alejandro Jiménez Cano
Resumen
En el presente trabajo expondremos la teoría Einstein-Hilbert en dimensión arbitraria aco-plada a lagrangianos de materia independientes de la conexión, y obtendremos las ecua-ciones de movimiento mediante el formalismo métrico y el formalismo de Palatini. En elprimero se toma la conexión de Levi-Civita y en el segundo se admite una conexión generalindependiente de la métrica. Calculamos la solución general de la ecuación de la conexióne interpretamos la física de las soluciones haciendo incapié en las que son diferentes de laLevi-Civita. A continuación, resolvemos el problema mediante Vielbein, en el fibrado tan-gente, demostrando que ambos procedimientos son equivalentes bajo ciertas condicioneslícitas. Finalmente, con el apoyo de los Vielbein, introduciremos en el espaciotiempo uncampo espinorial local de Dirac y resolveremos las ecuaciones de movimiento obteniendo,de nuevo, la conexión más general compatible con la teoría; el espín, que no aparecía en losanteriores casos, jugará un papel importante como fuente de torsión.
“Si buscas resultados distintos, no hagas siempre lo mismo”.
Albert Einstein

Índice general
Notación III
Convenios VI
1 Introducción y motivación 1
2 Nociones y bases matemáticas 42.1 Variedades diferenciables . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Variedades y coordenadas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42.1.2 Espacio tangente y cotangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.2 Cambios generales de coordenadas y tensores . . . . . . . . . . . . . . . . . . . . . . . . 52.3 Métrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.3.1 Geodésicas métricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 72.4 Conexión afín y curvatura . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.4.1 Conexión afín y derivada covariante . . . . . . . . . . . . . . . . . . . . . . . . . . 92.4.2 Transporte paralelo y geodésicas afines . . . . . . . . . . . . . . . . . . . . . . . . 102.4.3 Curvatura y torsión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.5 Desviación geodésica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 122.6 Métricas y conexión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.6.1 Conexiones métricas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.6.2 Conexión de Levi-Civita . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 132.6.3 Descomposición de una conexión afín general . . . . . . . . . . . . . . . . . . . . 14
2.7 Principio de acción estacionaria . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3 Dinámica de la Relatividad General bajo los formalismos métrico y de Palatini 163.1 Punto de partida: acción y métodos variacionales en Relatividad General . . . . . . . . . 163.2 Ecuaciones de los campos y la métrica mediante ambos formalismos . . . . . . . . . . . 18
3.2.1 Ecuación de movimiento de los campos . . . . . . . . . . . . . . . . . . . . . . . . 183.2.2 Ecuación de Einstein en el formalismo métrico . . . . . . . . . . . . . . . . . . . . 183.2.3 Ecuación de Einstein en el formalismo de Palatini . . . . . . . . . . . . . . . . . . 193.2.4 Formalismo métrico como caso particular a nivel de ecuaciones de Einstein . . . 20
3.3 Ecuación de la conexión . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
4 Relatividad General desde el espacio tangente 224.1 Formalismo de los Vielbein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
4.1.1 Concepto de Vielbein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 224.1.2 Conexión de espín y curvatura de espín . . . . . . . . . . . . . . . . . . . . . . . . 234.1.3 El postulado del Vielbein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
4.2 Acción en el espacio tangente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 244.3 Formalismo de primer orden desde el tangente . . . . . . . . . . . . . . . . . . . . . . . . 25
4.3.1 Ecuación para los Vielbein. Ecuaciones de Einstein . . . . . . . . . . . . . . . . . 254.3.2 Ecuación general para la conexión de espín . . . . . . . . . . . . . . . . . . . . . . 27
I
II Índice general
5 Conexiones de Palatini 295.1 Solución general de la ecuación de la conexión . . . . . . . . . . . . . . . . . . . . . . . . 295.2 Tensor de Riemann y sus contracciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . 305.3 Ecuaciones de movimiento bajo las conexiones de Palatini . . . . . . . . . . . . . . . . . 315.4 Análisis de las geodésicas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 325.5 Desviación geodésica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 335.6 Propiedad homotética . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 355.7 El problema de la indetectabilidad y la interpretación de las soluciones de Palatini . . . 35
6 Gravedad acoplada al campo de Dirac 376.1 El campo de Dirac en el espacio de Minkowski . . . . . . . . . . . . . . . . . . . . . . . . 376.2 El campo de Dirac en espacios curvos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 386.3 Gravedad acoplada al campo fermiónico de Dirac . . . . . . . . . . . . . . . . . . . . . . 396.4 Ecuación de Dirac . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 406.5 Ecuaciones de Einstein . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 416.6 Ecuación de la conexión de espín . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 426.7 Solución general . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
6.7.1 Resolución de la ecuación . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 436.7.2 Curvatura de las soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 446.7.3 Más propiedades de las soluciones . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
7 Conclusiones 46
Apéndices 48
A Variaciones útiles 50A.1 Variación de la curvatura con una conexión afín general . . . . . . . . . . . . . . . . . . . 50A.2 Variación δSRicci bajo la conexión de Levi-Civita . . . . . . . . . . . . . . . . . . . . . . . 50A.3 Variaciones del tensor de curvatura de espín bajo una variación de la conexión de espín 51A.4 Variación del Vielbein y la conexión de espín bajo TLL . . . . . . . . . . . . . . . . . . . . 52A.5 Variación de la acción de los campos de materia bajo TLL . . . . . . . . . . . . . . . . . . 52
B Más sobre la curvatura y la torsión de espín 54B.1 Tensor de curvatura de espín y contracciones . . . . . . . . . . . . . . . . . . . . . . . . . 54B.2 Tensores y escalares de curvatura de espín bajo los postulados del Vielbein . . . . . . . . 54
B.2.1 Los postulados del Vielbein y la antisimetría de la conexión de espín . . . . . . . 54B.2.2 Consecuencias de los postulados sobre la curvatura de espín . . . . . . . . . . . . 55
B.3 Torsión de espín . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
Bibliografía 58
Notación
TABLA DE SÍMBOLOS
M Variedad / espaciotiempo
TpM, T ∗pM, T(r, s)p M Espacio tangente, cotangente y tensorial de tipo (r, s) aM en p
TM, T ∗M, T(r, s)M Fibrado tangente, cotangente y tensorial de tipo (r, s) deM
D Dimensión de la variedad
⊗ Producto tensorial
gµν Componentes del tensor métrico del espaciotiempo en una basede cordenadas
ηab Componentes de la métrica del espaciotiempo de Minkowski encartesianas
eaµ, eµa D-bein y D-bein inverso1
g, e Determinantes del tensor métrico gµν y del Vielbein eaµ
V, W, E,...; V µ,Wµ, Eµν ,... Vectores, formas, tensores,... ; sus componentes
(PV) Postulado del Vielbein{µρν
}Símbolos de Christoffel
Γσµν Conexión afín
∇µ, R λµνρ , Tσµν Derivada covariante, curvatura y torsión asociadas a Γσµν
ω bµa Conexión de espín
Dµ, R bµνa , T aµν Derivada covariante, curvatura y torsión asociadas a ω b
µa
Dµ Derivada completamente covariante
Dspµ Derivada espinorial
L, S Densidad lagrangiana y acción
Gµν Tensor de Einstein
κ = 8πGN Constante de las ecuaciones de Einstein (con GN la cte degravitación de Newton)
τχµν Tensor energía-momento de Hilbert para la materia χ
tχµν Tensor energía-momento respecto al Vielbein para la materia χ√|g|dDx Elemento de volumen D-dimensional invariante bajo cambios
generales de coordenadas
LD o bien R1,D−1 Espaciotiempo de Minkowski en D dimensiones.
1Abusaremos del lenguaje y llamaremos a ambos Vielbein aunque la dimensión sea arbitraria.
III

IV Notación
χ Campo general (escalar, vector, espinor, conexión, ...)
φ Campo escalar
Aµ, Fµν Potencial y tensor electromagnético
Aµ, Fµν ; Bµ, Fµν Campo no-dinámico asociado a las conexiones de Palatini ytensor asociado; idem para las conexiones Dirac-Palatini
Ψ, Ψ Biespinor (espinor de Dirac) y biespinor adjunto
~ Constante reducida de Planck (h/2π)
i Unidad imaginaria
γa Matrices gamma en D dimensiones
��B ≡ γaBa Feynman slash
TLL Transformaciones locales de Lorentz
CGC Cambios generales de coordenadas (difeomorfismos)
ISO(D − 1, 1), iso(D − 1, 1) Grupo de Poincaré en D dimensiones y su álgebra de Lie
SO(D − 1, 1), so(D − 1, 1) Grupo de Lorentz en D dimensiones y su álgebra de Lie
P a Generadores de las traslaciones espaciotemporales
Mab, Mabvect, Σab Generadores del álgebra de Lorentz: general, en repres. vectorial
y en repres. espinorial
L?∗, Λab, LspinAB Transformación de Lorentz: general, en repres. vectorial y en
repres. espinorial
θab Parámetros de una transformación de Lorentz
Spin(D − 1, 1), spin(D − 1, 1) Recubridor universal del grupo de Lorentz (grupo de espín) ysu álgebra de Lie
Diff(M) Grupo de difeomorfismos de la variedadM
≡ Igualdad remarcable, identidad
:= Igualdad por definición
o Producto semidirecto
[M, N ]ij , {M, N}ij Conmutador y anticonmutador de matrices (u operadoresdiferenciales)
[V, W]µ, [Pa, Mab] Corchete de Lie de campos vectoriales o de elementos de unálgebra de Lie
1 Operador o matriz identidad

Notación V
Y, a continuación, puntualizamos dos notaciones que utilizaremos:
o Simetrizador y antisimetrizador (indicado para dos índices; la generalización es automática):
V(µWν) :=1
2(VµWν + VνWµ) , V[µWν] :=
1
2(VµWν − VνWµ) .
Obsérvese que VµWν = V(µWν) +V[µWν]. Todo lo que esté dentro del paréntesis o el corchete sesomete a anti/simetrización:
V(µWaν) :=1
6(VµWaν + VµWνa + VaWµν + VaWνµ + VνWaµ + VνWµa) .
Para simetrizar el objeto VµWaν en µ y ν, usaremos barras para señalar los índices que no se venafectados por estos símbolos, es decir:
V(µW|a|ν) =1
2(VµWaν + VνWaµ) .
El simetrizador o el antisimetrizador solo lo haremos actuar sobre índices de abajo o de arriba,nunca mezclados. De modo que no es necesario incluir barras, por ejemplo, para el índice a en elcaso V(µW
aν). Si quisiéramos incluirlo en la simetrización deberíamos bajarlo, gabV(µWbν) [ver
criterio de índices Pág. VI].
o Trabajaremos con diferentes conexiones. Distinguiremos los objetos asociados del modo si-guiente:
Rµν , Γσµν , ∇µ, ... (generales) ,
Rµν , Γσµν , ∇µ, ... (de Levi Civita/form. métrico) ,
Rµν , Γσµν , ∇µ, ... (form. de Palatini para Einstein-Hilbert) ,
Rµν , Γσµν , ∇µ, ... (form. de Palatini para Einstein-Hilbert-Dirac) .

Convenios
o Tomaremos la velocidad de la luz en el vacío igual a la unidad c = 1.
o Signatura de la métrica: asignaremos + a las componentes temporales y − a las espaciales de lamétrica. Por ejemplo, para una métrica lorentziana cuadrimensional tendríamos (+−−−).
o Índices
Emplearemos continuamente el convenio de sumación de Einstein según el cual índice repeti-do arriba y abajo en un término se supone sumado en todos sus posibles valores (en general será ladimensión del espacio en el que vivan las componentes del objeto).
• Para tensores, los índices arriba se corresponden a la parte contravariante (vectorial) deltensor y los de abajo a la covariante (covectorial).
• Para objetos no tensoriales, los índices arriba o abajo se fijan de forma adecuada segúnconvenga para trabajar de la forma más fluida y cómoda posible [ver Criterio de índices,más adelante].
• Índices griegos en minúscula: µ, ν, ρ, λ, τ, η, ... se refieren a componentes en una base ho-lónoma o de coordenadas {∂µ} si están arriba o su dual {dxµ} si están abajo.
• Índices latinos en minúscula: a, b, c, d, e, f, ... se refieren a componentes en una base noholónoma ortogonal {ea} si están arriba o su dual {ea} si están abajo.
• Índices latinos en mayúscula: A, B, C, ... son índices espinoriales.
o Criterio de índices
Es un resultado muy importante que utilizaremos exhaustivamente y que se basa en lo siguien-te. Dado un objeto con componentes etiquetadas por ciertos índices, este debe tener una formafundamental (o definición); pues diremos que, respecto a esta forma, sus índices no espinorialessuben y bajan con la métrica correspondiente y se transforman de un tipo a otro mediante los Vielbein.Por ejemplo, sea un tensor definido M aµνb
c , entonces:
Mdaµνb := ηcdM aµνbc , M aµ b
ρ λ := ecρgλνMaµνbc , ...
Puede parecer una trivialidad dado a lo que se está acostumbrado en Relatividad General, perono lo es en absoluto. Subir y bajar índices consiste en intercambiar partes covariantes con partescontravariantes y esto solo es lícito cuando el objeto es tensorial. Sin embargo, nuestro criteriode índices se extiende a objetos no tensoriales. Por ejemplo, la conexión de espín se define ω b
µa ,pero a veces nos la encontraremos con los dos índices abajo ωµab; este objeto, estrictamentehablando, no es la conexión de espín, es una notación para referirnos a ω c
µa ηcb, la cual facilitamucho la escritura.
Pero hay que tener cuidado con ella: consideremos un lagrangiano que depende de los Vielbeiny de un objetoWµa(χ) (no necesariamente tensorial), con el campo χ independiente del Vielbein.Al derivar respecto al Vielbein Wba, hemos de tener en cuenta que hay un Vielbein “escondido”pues esta es una forma de denotar eµbWµa.
o El tensor de Riemann, la torsión, el tensor de Ricci y el escalar de curvatura que emplearemoslos definimos del siguiente modo:
Rµνρλ := ∂µΓλρν − ∂νΓλµρ + ΓλµσΓσνρ − ΓλνσΓσµρ , Rµν := R ρ
µρν ,
Tλρν := Γλρν − Γλνρ , R := gµνRµν .
VI

1 Introducción y motivación
La Teoría de la Relatividad General se sustenta fuertemente en el principio de equivalencia según elcual la gravedad es un artefacto de las coordenadas elegidas, pudiéndose suprimir localmente con uncambio adecuado de las mismas. Sin embargo, no puede deshacerse globalmente como consecuenciade la curvatura del espaciotiempo. Einstein identificó gravedad con curvatura y a ésta la relacionócon el contenido de energía del universo mediante sus conocidas ecuaciones de Einstein1:
Gµν = −κτµν , (1.0.1)
donde Gµν := Rµν− 12gµνR es el tensor de Einstein dependiente del tensor de Ricci Rµν y del escalar de
curvatura del espaciotiempo R , κ = 8πGN es una constante relacionada con GN , la constante de gra-vitación universal, y τµν es el tensor energía-momento que contiene la información sobre la distribuciónde materia y energía. De momento no es importante saber qué significa cada uno de estos objetos, losdefiniremos en los próximos capítulos. Lo importante es el mensaje: la curvatura es producida por lamateria y la energía y, a su vez, la dinámica de éstas está condicionada por la curvatura.
La forma del tensor Gµν , puede deducirse a partir de asunciones de consistencia físico-matemática:el espacio plano (sin curvatura) ha de ser solución para el vacío (τµν = 0), la energía debe conservarselocalmente (∇ρτµν = 0),... así lo construyó Einstein.
Sin embargo, días antes de la publicación de Einstein, David Hilbert publicó las ecuaciones deEinstein del vacío,
Rµν −1
2gµνR = 0 , (1.0.2)
así como un modo de obtenerlas mediante la imposición del principio de acción estacionaria sobre laacción
SEH =
ˆdDx
√|g| 1
2κR , (1.0.3)
que llamaremos acción de Einstein-Hilbert, donde g es el determinante del tensor métrico. Sin embargoel modo de derivar las ecuaciones de movimiento presenta una sutileza y ésta tiene que ver con laarbitrariedad de lo que llamaremos conexión. Este objeto va a proporcionarnos un modo de trans-portar “paralelamente” vectores en un espacio curvo donde este no puede llevarse a cabo de formanatural como en los planos. Y, gracias a ello, podremos comparar vectores próximos y de aquí obteneruna definición de derivada que va a casar bien con las transformaciones que gobiernan el espacio-tiempo que son los cambios generales de coordenadas. Y es con este objeto con el que se construyenlos tensores de curvatura y torsión que diferenciarán a la variedad del espacio plano. En física y enmatemáticas se suele elegir como conexión la de Levi-Civita, cuya existencia y unicidad están garan-tizadas y que, además de destacar por sus propiedades, queda completamente determinada por eltensor métrico. De estas propiedades, una de las más destacadas es el hecho de que las trayectoriasmás “rectas”2 entre dos puntos coinciden con las trayectorias que minimizan la acción de la partículalibre (los caminos “cortos”3) entre entre ambos. Con una conexión general no es cierto, y este es unode los argumentos más fuertes para elegir la conexión de Levi-Civita (y es una razón física).
Por otra parte, si consideramos el lagrangiano de gravedad más sencillo, el de Einstein-Hilbert, ve-mos que es función exclusiva de la curvatura (i.e. de la conexión) y de la métrica. Al elegir Levi-Civita[ec. (1.0.3)], deja de intervenir la conexión como un campo independiente y ahora todo depende de lamétrica. Efectivamente, tal y como hizo Hilbert, variando e igualando a cero con este planteamiento(formalismo métrico) se reproducen las ecuaciones de Einstein del vacío.
1En noviembre de 1915, Einstein las publicó en una forma equivalente: Rµν = −κ(τµν − 1
2gµντ
)con τ = gµντµν .
2Aquellas en las que la 4-velocidad se mantiene “paralela” a sí misma a lo largo de la curva3Estrictamente hablando, puntos críticos de la longitud.
1
2
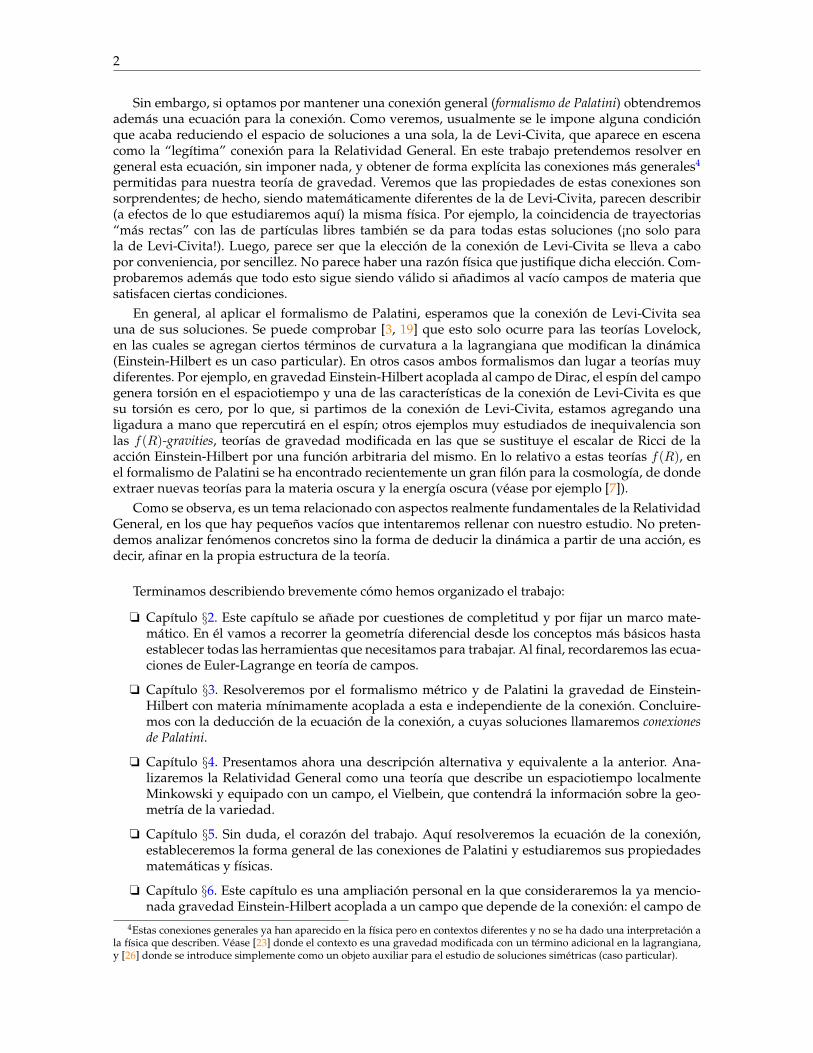
Sin embargo, si optamos por mantener una conexión general (formalismo de Palatini) obtendremosademás una ecuación para la conexión. Como veremos, usualmente se le impone alguna condiciónque acaba reduciendo el espacio de soluciones a una sola, la de Levi-Civita, que aparece en escenacomo la “legítima” conexión para la Relatividad General. En este trabajo pretendemos resolver engeneral esta ecuación, sin imponer nada, y obtener de forma explícita las conexiones más generales4
permitidas para nuestra teoría de gravedad. Veremos que las propiedades de estas conexiones sonsorprendentes; de hecho, siendo matemáticamente diferentes de la de Levi-Civita, parecen describir(a efectos de lo que estudiaremos aquí) la misma física. Por ejemplo, la coincidencia de trayectorias“más rectas” con las de partículas libres también se da para todas estas soluciones (¡no solo parala de Levi-Civita!). Luego, parece ser que la elección de la conexión de Levi-Civita se lleva a cabopor conveniencia, por sencillez. No parece haber una razón física que justifique dicha elección. Com-probaremos además que todo esto sigue siendo válido si añadimos al vacío campos de materia quesatisfacen ciertas condiciones.
En general, al aplicar el formalismo de Palatini, esperamos que la conexión de Levi-Civita seauna de sus soluciones. Se puede comprobar [3, 19] que esto solo ocurre para las teorías Lovelock,en las cuales se agregan ciertos términos de curvatura a la lagrangiana que modifican la dinámica(Einstein-Hilbert es un caso particular). En otros casos ambos formalismos dan lugar a teorías muydiferentes. Por ejemplo, en gravedad Einstein-Hilbert acoplada al campo de Dirac, el espín del campogenera torsión en el espaciotiempo y una de las características de la conexión de Levi-Civita es quesu torsión es cero, por lo que, si partimos de la conexión de Levi-Civita, estamos agregando unaligadura a mano que repercutirá en el espín; otros ejemplos muy estudiados de inequivalencia sonlas f(R)-gravities, teorías de gravedad modificada en las que se sustituye el escalar de Ricci de laacción Einstein-Hilbert por una función arbitraria del mismo. En lo relativo a estas teorías f(R), enel formalismo de Palatini se ha encontrado recientemente un gran filón para la cosmología, de dondeextraer nuevas teorías para la materia oscura y la energía oscura (véase por ejemplo [7]).
Como se observa, es un tema relacionado con aspectos realmente fundamentales de la RelatividadGeneral, en los que hay pequeños vacíos que intentaremos rellenar con nuestro estudio. No preten-demos analizar fenómenos concretos sino la forma de deducir la dinámica a partir de una acción, esdecir, afinar en la propia estructura de la teoría.
Terminamos describiendo brevemente cómo hemos organizado el trabajo:
o Capítulo §2. Este capítulo se añade por cuestiones de completitud y por fijar un marco mate-mático. En él vamos a recorrer la geometría diferencial desde los conceptos más básicos hastaestablecer todas las herramientas que necesitamos para trabajar. Al final, recordaremos las ecua-ciones de Euler-Lagrange en teoría de campos.
o Capítulo §3. Resolveremos por el formalismo métrico y de Palatini la gravedad de Einstein-Hilbert con materia mínimamente acoplada a esta e independiente de la conexión. Concluire-mos con la deducción de la ecuación de la conexión, a cuyas soluciones llamaremos conexionesde Palatini.
o Capítulo §4. Presentamos ahora una descripción alternativa y equivalente a la anterior. Ana-lizaremos la Relatividad General como una teoría que describe un espaciotiempo localmenteMinkowski y equipado con un campo, el Vielbein, que contendrá la información sobre la geo-metría de la variedad.
o Capítulo §5. Sin duda, el corazón del trabajo. Aquí resolveremos la ecuación de la conexión,estableceremos la forma general de las conexiones de Palatini y estudiaremos sus propiedadesmatemáticas y físicas.
o Capítulo §6. Este capítulo es una ampliación personal en la que consideraremos la ya mencio-nada gravedad Einstein-Hilbert acoplada a un campo que depende de la conexión: el campo de
4Estas conexiones generales ya han aparecido en la física pero en contextos diferentes y no se ha dado una interpretación ala física que describen. Véase [23] donde el contexto es una gravedad modificada con un término adicional en la lagrangiana,y [26] donde se introduce simplemente como un objeto auxiliar para el estudio de soluciones simétricas (caso particular).

Capítulo 1. Introducción y motivación 3
Dirac. Campo de enorme relevancia en física pues describe fermiones de espín 1/2. Esta teoríano puede construirse como las del capítulo §3 debido a las propiedades de los espinores y ha deaprovecharse la estructura localmente plana descrita en §4 para introducirlos. Resolveremos lasecuaciones de movimiento en el caso de una conexión completamente general, y obtendremosun resultado muy parecido al del capítulo §5. La novedad será un término adicional ligado alespín y que será fuente de torsión en el espaciotiempo.
Los apéndices finales no forman parte del trabajo en sí. Constituyen simplemente una recopilaciónde material complementario y algunos cálculos accesorios que lo complementan.

2 Nociones y bases matemáticas
2.1. Variedades diferenciables
2.1.1. Variedades y coordenadas
El lenguaje matemático con el que se formula la Relatividad General es el propio de la geometríadiferencial. Vamos a hacer un recorrido rápido por algunas nociones básicas que necesitaremos.
Una variedad topológicaM de dimensión D es un espacio topológico Hausdorff que verifica el se-gundo axioma de numerabilidad y que tiene localmente la estructura de un espacio euclídeo RD. Estoúltimo significa que para cada punto p ∈M podemos encontrar un entorno abierto del mismo U 3 py un homeomorfismo1 ϕ : U → A entre este y algún abiertoA ⊂ RD. A cada par (U, ϕ) lo llamaremoscarta alrededor de p y a las aplicaciones xµ : U → R, definidas como ϕ(q) = (x1(q), x2(q), ..., xD(q))con q ∈ U , se las llama funciones coordenadas asociadas a la carta. A un conjunto de cartas tal que loscorrespondientes abiertos recubren toda la variedad lo llamaremos atlas.
Consideremos ahora dos cartas alrededor de p, (U, ϕ), (V, ψ). El cambio de carta es una funciónentre espacios euclídeos:
ψ ◦ ϕ−1 : ϕ(U ∩ V ) ⊂ RD −→ ψ(U ∩ V ) ⊂ RD . (2.1.1)
Cuando los cambios de carta son funciones diferenciables (C∞) al atlas se le llama estructura diferen-ciable, y a la variedad junto con dicha estructura variedad diferenciable.
2.1.2. Espacio tangente y cotangente
SeaM una variedad diferenciable de dimensión D, p un punto de la misma y (U, ϕ = (xµ)) unacarta alrededor de p.
Diremos que una aplicación f : M→ R es una función diferenciable sobreM si al “llevar el dominiomediante las cartas” a RD lo es; formalmente, si la función f ◦ ϕ−1 : RD → R es diferenciable.La función f ◦ ϕ−1 admite derivadas parciales en RD, lo cual nos permite extender el concepto dederivada a la variedad, mediante:
∂f
∂xµ(p) :=
∂(f ◦ ϕ−1)
∂zµ(ϕ(p)) . (2.1.2)
donde zµ son las coordenadas elegidas en RD. Nótese que el resultado depende de la carta.Si consideramos ahora los operadores diferenciales:
∂
∂xµ: C∞(M) −→ C∞(M)
f 7−→ ∂f
∂xµ, (2.1.3)
uno para cada coordenada y construimos, en cada punto p ∈M, un espacio vectorial con base ∂∂xµ |p,
obtendremos el espacio tangente en ese punto
TpM := span
{∂
∂xµ|p : µ = 1, ..., D
}. (2.1.4)
Se trata de un espacio vectorial isomorfo a RD. El vector ∂∂xµ |p que denotaremos simplemente ∂µ|p,
lleva en el punto p la dirección y el sentido creciente de la línea de coordenadas xµ. Es interesante1Aplicación entre espacios topológicos biyectiva y continua, con inversa continua.
4

Capítulo 2. Nociones y bases matemáticas 5
ver que, aunque las derivadas dependan de la carta, el espacio tangente no; un cambio de carta acabadando lugar simplemente a un cambio de base: ∂µ|p → ∂µ|p en el tangente. Cualquier vector deltangente V(p) = V µ(p)∂µ|p actúa sobre las funciones f ∈ C∞(M) del modo “natural”
V(p)(f) = V µ(p)∂µf(p) . (2.1.5)
El siguiente paso es dejar de estar anclados a un punto fijo y movernos por la variedad. Se defineentonces el fibrado tangente
TM :=⋃p∈M
TpM , (2.1.6)
dotado de la estructura de fibrado con proyección π : TM →M, asociando a cada vector el puntosobre el que está pinchado; siendo la base M y la fibra en cada punto TpM = π−1(p). El fibradotangente también tiene estructura de variedad diferenciable.
Una vez que conocemos el concepto de vector tangente a la variedad (un elemento del fibradotangente), es lícito construir mediante dualidad las formas lineales o 1-formas sobre la variedad. Lanotación empleada para la base dual es dxµ, de modo que la relación de dualidad se expresaría (encada punto) dxµ(∂ν) = δµν . Se definen pues el espacio cotangente en un punto p de la variedad y elfibrado cotangente del modo siguiente:
T ∗pM := span {dxµ|p : µ = 1, ..., D} , T ∗M :=⋃p∈M
T ∗pM . (2.1.7)
2.2. Cambios generales de coordenadas y tensores
Sean dos variedades diferenciablesM1 yM2 de dimensión D1 y D2, respectivamente. Análoga-mente a la definición de funciones diferenciables sobre una variedad, diremos que una aplicación (nonecesariamente biyectiva) F : M1 →M2 es diferenciable si al “llevar el dominio y la imagen median-te las cartas” al espacio euclídeo lo es; formalmente, si estableciendo en torno a cada punto p ∈ M1
una carta (U, ϕ) y en torno a F (p) ∈M2 otra carta (F (U), ψ), la función ψ ◦F ◦ϕ−1 : RD1 → RD2 esdiferenciable.
A un homeomorfismo entre variedades Φ : M1 → M2 tal que, tanto él como su inverso sondiferenciables, lo llamaremos difeomorfismo. Nos van a interesar especialmente los difeomorfismos deuna variedad M en sí misma, al conjunto de los cuales denotaremos Diff(M). Este conjunto con lacomposición de aplicaciones diferenciables tiene estructura de grupo de Lie de dimensión infinita. Elcorrespondiente álgebra de Lie está generado por los cambios generales de coordenadas infinitesima-les.
Los difeomorfismos de una variedad en sí misma pueden verse desde un punto de vista pasi-vo (imaginando que no mueven puntos), traduciéndose pues en un cambio general de coordenadasxµ → yα (CGC). Al ser dos puntos de vista del mismo concepto, de ahora en adelante los usaremosindistintamente.
Vamos ahora a definir una serie de objetos de acuerdo a cómo transforman bajo un CGC cualquie-ra xµ → yα. En este apartado distinguiremos sus coordenadas en uno u otro sistema de coordenadassegún los índices (µ y ν frente a α y β).
o En física se llaman campos escalares a las aplicaciones f ∈ C∞(M), es decir, aquellas que a cadapunto de la variedad le asocian un número real. Los escalares no cambian bajo CGC.
o Por otro lado tenemos los campos vectoriales o 1-contravariantes que son aplicaciones V : M →TM, que colocan en cada punto de la variedad un vector tangente, pudiéndose localmenteexpresar V(p) = V µ(p)∂µ|p, donde V µ(p) ∈ C∞(M). De ahora en adelante, denotaremos losvectores simplemente por sus componentes omitiendo incluso el punto: V µ. Si efectuamos un

6 2.3. Métrica
CGC xµ → yα, es fácil ver que los vectores cambian según:
V α =∂yα
∂xµV µ , ya que la base lo hace (regla de la cadena): ∂α =
∂xµ
∂yα∂µ . (2.2.1)
o Análogamente se definen campos covectoriales o 1-covariantes como aplicaciones α : M→ T ∗Mque a cada punto de la variedad le asocian una 1-forma, pudiéndose expresar localmente α(p) =αµ(p)dxµ|p donde αµ(p) ∈ C∞(M). Y, adoptando una notación análoga a la anterior se llega alas siguientes reglas de transformación bajo CGC xµ → yα:
αα =∂xµ
∂yααµ , ya que la base lo hace (regla de la cadena): dyα =
∂yα
∂xµdxµ . (2.2.2)
Mediante la operación producto tensorial y haciendo combinaciones lineales pueden construirse apartir de {∂µ} y {dxµ} bases para fibrados tensoriales T(r, s)M, y con ellos construir tensores sobre lavariedad.
o En general un campo tensorial de tipo (r, s) o bien, r-contravariante s-covariante es una aplicaciónT : M→ T(r, s)M, que localmente se expresa T = Tµ1µ2...µr
ν1ν2...νs∂µ1⊗ ...⊗ ∂µr ⊗ dxν1 ⊗ ...⊗
dxνs y transforma bajo CGC:
Tα1α2...αrβ1β2...βs
=∂yα1
∂xµ1...∂yαr
∂xµr∂xν1
∂yβ1...∂xνs
∂yβsTµ1µ2...µr
ν1ν2...νs . (2.2.3)
Con campo tensorial estaremos englobando también vectores, covectores y escalares como casos par-ticulares; de hecho:
T(1, 0)M = TM , T(0, 1)M = T ∗M , T(0, 0)M = C∞(M) . (2.2.4)
2.3. Métrica
Una métrica es una campo tensorial 2-covariante (forma bilineal) simétrico no degenerado sobreuna variedad. La métrica es el objeto que nos va a permitir establecer en este marco una geometría.A veces se habla de la métrica como un producto escalar, definiéndose para la base justamente comolas componentes de la métrica en esta:
gµν = g(∂µ, ∂ν) ≡ ∂µ · ∂ν . (2.3.1)
Puede construirse también un producto escalar de 1-formas, conduciendo así a la definición demétrica inversa gµν , llamada así porque gµνgνρ = δµρ . Si bien TpM y T ∗pM por ser duales son iso-morfos, la métrica permite establecer un isomorfismo natural entre ellos [teorema de Riesz-Frechét], esdecir, independiente de la base. Este isomorfismo en matemáticas se expresa mediante las aplicacio-nes bemol y sostenido y, más comúnmente en física, con la operación de “subir y bajar índices”. Deforma que cada vector V µ tiene unívocamente una forma asociada Vν = gµνV
µ y viceversa. E insisti-mos, con unívocamente nos referimos a que la asociación no depende de las bases {∂µ} y {dxµ}, sinoexclusivamente de la métrica.
Todo ello puede extenderse a que los elementos de cualquier fibra tensorial T(r, s)p M estarán rela-
cionados con los elementos de otras fibras tensoriales de igual orden (r + s), es decir, igual númerode índices. Por ejemplo, en las igualdades Nµνρ = gλνNµ ρ
λ = gηρNµνη , los tensores Nµνρ, Nµ ρ
λ yNµν
η son distintos (viven en distintos espacios) pero están relacionados unívocamente mediante lamétrica. Gracias a ello, podemos trabajar en uno u otro espacio según nos resulte más cómodo puesno perdemos información al movernos entre ellos.
La métrica induce una estructura de espacio normado con norma:
‖V‖ :=√|VµV µ| =
√|gµνV µV ν | . (2.3.2)

Capítulo 2. Nociones y bases matemáticas 7
donde el valor absoluto está justificado pues la forma cuadrática asociada a la métrica, gµνV µV ν (conV variando en el tangente), no tiene por qué ser definida positiva.
Convenio: a los vectores con gµνVµV ν > 0 los llamaremos temporales, aquellos con gµνV
µV ν < 0espaciales y a los de norma nula que son diferentes del vector cero se les llama luminosos.
Algunos conceptos para terminar:
o Al par (M, g) lo llamaremos variedad pseudoriemanniana. Si tomamos un espacio tangente cual-quiera y fijamos una base ortonormal, la base estará formada exclusivamente por vectores tem-porales y espaciales (pues los luminosos tienen norma 0). Se puede demostrar que el número devectores temporales en una base ortonormal es independiente de la base y se denomina índice.Por ejemplo si la dimensión total es D ≥ 3 y el índice vale 3, cualquier base ortonormal poseerá3 vectores temporales y D − 3 espaciales.
o El caso particular que nos interesa más es el de variedades lorentzianas (con una métrica loren-tziana) que son aquellas en las que el índice en todos los espacios tangentes vale 1.2 Al elegiruna base ortonormal estamos eligiendo una dirección y un sentido para el “flujo del tiempo”,la que señala el vector temporal, y que elegiremos como sentido “hacia el futuro”. Al conjuntoformado por todos los vectores temporales y luminosos en un punto lo llamaremos cono de luzen dicho punto. Se puede demostrar que este conjunto tiene dos componentes conexas isomor-fas: una que contiene al vector temporal de la base y que llamaremos cono de luz futuro y a laotra cono de luz pasado. Además, si al cono de luz le añadimos el vector cero, es fácil demostrarque es un subespacio vectorial del tangente en dicho punto.
o En ocasiones es posible hacer una elección de base adecuada tal que determine una “direcciónglobal de flujo del tiempo” sobre la variedad3. Sin entrar en los detalles rigurosos de ello, puesno intervienen en nada de lo que haremos, cuando esta elección sea posible diremos que esta-mos ante una variedad orientable temporalmente.
o Definimos un espaciotiempo como una variedad diferenciable lorenziana M (de dimensión Darbitraria) conexa y orientable temporalmente. El espacio tangente en cada punto será isomorfoal espacio de Minkowski LD = R1,D−1.
2.3.1. Geodésicas métricas
Una curva (diferenciable)4 sobreM es una aplicación continua (y diferenciable) γ : I → M con Iun intervalo de R. A la variable que se mueve en I la llamaremos parámetro de la curva y a la imagende la curva en la variedad trayectoria. Obsérvese que, dada una curva, es posible obtener otras curvasque den la misma trayectoria (vía reparametrización).
Sea C una trayectoria no luminosa que une dos puntos del espaciotiempo y γ1(σ) una parametri-zación. Consideremos que γ1(σ) es un punto crítico para la distancia (tiempo propio) entre los dospuntos5:
s =
ˆγ1
√|gµν(σ)x′µx′ν |dσ . (2.3.3)
donde con la apóstrofe denotamos derivada respecto al parámetro de la curva (A′ = dAdσ ). Se puede
2Según el convenio anterior: con una dimensión temporal (signatura +) y D − 1 espaciales (con signatura −).3Esencialmente nos referimos a que no haya discontinuidades en la orientación de los conos de luz. Pues, en ese caso, la
dirección del futuro no estaría bien definida en el punto de discontinuidad.4Consideraremos exclusivamente curvas diferenciables en este trabajo. Por lo que omitiremos el “diferenciable” por senci-
llez de ahora en adelante.5En el caso de una trayectoria temporal esta es la acción de las partículas de prueba, las que perturban el espaciotiempo de
forma despreciable, en caída libre.

8 2.3. Métrica
Figura 2.3.1: Parametrizaciones de una trayectoria crítica.
demostrar que esto ocurre si y solo si se verifica:
x′′µ +{µρν
}x′ρx′ν =
(s′′
s′
)x′µ . (2.3.4)
No consideramos curvas luminosas pues aparecen problemas al perturbar la curva. Como gµν(σ)x′µx′ν =0 podemos optar por poner o no del valor absoluto en (2.3.3). Si no lo hacemos, al perturbar, los tra-mos espaciales con nuestros convenios darian raíces de números negativos; y si ponemos el valorabsoluto no tenemos diferenciabilidad en gµν(σ)x′µx′ν = 0 que es justo donde la necesitamos. Porestas patologías las excluimos de nuestro estudio.
El observador que se mueve a lo largo de la curva puede elegir como coordenada temporal s pa-sándose a llamar su tiempo propio. Podemos entonces elegir una parametrización especial, γ2(τ), quedenominaremos parametrización de tiempo propio a lo largo de la curva que es cualquier parametriza-ción lineal6:
s = ατ + β , (2.3.5)
donde α > 0 (lo elegimos positivo) y β son dos constantes con las dimensiones del tiempo propios. β representa el instante de tiempo propio correspondiente con el valor τ = 0 del parámetro, y αrepresenta la conversión entre el parámetro y las unidades elegidas para el tiempo propio. Con estaparametrización:
s′ = α , s′′ = 0 , (2.3.6)
y, entonces, esto nos conduce a la ecuación de la geodésica métrica:
x′′µ +{µρν
}x′ρx′ν = 0 , (2.3.7)
la cual es invariante bajo cambio de tiempo propio (diferentes elecciones de α y β).A una trayectoria S para la que la distancia permanece estacionaria bajo perturbaciones infinitesi-
males de la curva la llamaremos a lo largo de nuestro trabajo trayectoria crítica7. Todas sus curvas, quellamaremos pre-geodésicas métricas, verifican (2.3.4), pero de entre todas ellas llamaremos geodésicasmétricas a las que satisfacen (2.3.7) [Figura 2.3.1].
6Nótese que la llamada parametrización por el arco no es otra cosa que la parametrización de tiempo propio con α = 1.Calculamos la velocidad (módulo) a lo largo de la curva:
‖uµ‖2 = gµνdxµ
dτ
dxν
dτ= gµν
dxµ
d(s−βα
) dxν
d(s−βα
) = α2gµνdxµ
ds
dxν
ds= α2
ya que ds2 = gµνdxµdxν y, entonces, ‖uµ‖ = α. El caso α = 1 nos lleva a ‖uµ‖ = 1 que es justamente la definición deparametrización por el arco (curva recorrida con velocidad constante unitaria).
7Localmente (para evitar problemas con puntos conjugados, por ejemplo) las temporales serán máximos y las espacialespuntos de silla para el tiempo propio.

Capítulo 2. Nociones y bases matemáticas 9
Figura 2.4.1: La conexión afín.
2.4. Conexión afín y curvatura
SeaM una variedad diferenciable (no tiene por qué tener una métrica).
2.4.1. Conexión afín y derivada covariante
La derivada parcial de un vector ∂µV ν no transforma como un tensor (1, 1) bajo CGC; de hecho,solamente transforma bien la derivada parcial de un escalar que transforma como vector. Queremosconstruir una forma de derivar tensores que preserve la estructura tensorial (i.e. que el resultado seaun tensor bajo CGC). Esta idea de derivación sobre la variedad implica, por ejemplo, para la derivadaen la dirección de xρ de un campo tensorial general,
lımδxρ→0
Tµ1µ2...µrν1ν2...νs(q)− T
µ1µ2...µrν1ν2...νs(p)
δxρ, (2.4.1)
que tenemos que ser capaces de comparar (restar) Tµ1µ2...µrν1ν2...νs en un punto p y otro punto q dife-
rente, lo cual no es trivial pues estamos restando elementos de fibras distintas del fibrado tensorial; yno hay una manera natural de hacerlo a priori. Cuando ocurre esto, necesitamos echar mano de unaconexión, que es un objeto matemático que nos permitirá transportar tensores de una fibra a otra. Paracomparar tensores de cualquier orden lo que hacemos es simplemente extender lo que les ocurre alos vectores y a los covectores pues los primeros son meras combinaciones de productos tensorialesde los últimos.
Consideremos entonces un campo vectorial V µ evaluado en dos puntos p y q de la variedad. Paracompararlos la idea es tomar uno de ellos, por ejemplo V µ(p) ∈ TpM y enviar a TqM un representantesuyo , V µP (q), que podrá compararse con V µ(q) y nuestra derivación será:
∇νV µ(q) = lımδxν→0
V µ(q)− V µP (q)
δxν, (2.4.2)
la cual está bien definida. La conexión se manifiesta en la definición de V µP (q) [Figura 2.4.1] quellamaremos transportado paralelo (infinitesimalmente) de V µ(p) al punto q:
V µP (q) = V µ(p)− ΓµλρδxλV ρ(p) . (2.4.3)
donde Γµλρ son las componentes de la conexión afín o, simplemente, conexión. Como ya anunciábamos,la conexión nos da un modo natural de transportar vectores de un espacio tangente a otro. Al par(M, Γ) se le llama variedad afínmente conectada.

10 2.4. Conexión afín y curvatura
Figura 2.4.2: Parametrizaciones de una trayectoria autoparalela.
Con todo ello la derivada covariante8 de un vector se define como:
∇νV µ = ∂νVµ + ΓµνρV
ρ . (2.4.4)
Un detalle muy importante a tener en cuenta es que la conexión afín no transforma como un tensor,pero la diferencia de dos conexiones afines sí.
Análogamente, para una 1-forma y un escalar (al que no le afecta la conexión) es:
∇νVµ = ∂νVµ − ΓρνµVρ , ∇νf = ∂νf . (2.4.5)
y, extendido a un tensor cualquiera
∇νTµ1...µrρ1...ρs = ∂νT
µ1...µrρ1...ρs
+Γµ1νσT
σ...µrρ1...ρs + ...+ ΓµrνσT
µ1...σρ1...ρs
−Γσνρ1Tµ1...µr
σ...ρs − ...− ΓσνρsTµ1...µr
ρ1...σ . (2.4.6)
Puede llevarse a cabo esta operación en cualquier dirección, no necesariamente en las direcciones delas coordenadas. Sea V = V ν∂ν , entonces:
∇VAµ = V ν∇νAµ . (2.4.7)
2.4.2. Transporte paralelo y geodésicas afines
Sea uµ = dxµ/dσ el campo vectorial que da la velocidad de una curva γ(σ) en cada punto. Laderivada covariante (lo hacemos para un vector) a lo largo de la curva se define a partir de (2.4.7):
uν∇νAµ(σ) , (2.4.8)
que representa el transporte paralelo a lo largo de la misma. Obsérvese que cada conexión define unconcepto diferente de “paralelo”. En particular, podríamos preguntarnos si la propia velocidad de lacurva al transportarla a lo largo de ésta se mantiene paralela con la conexión elegida, esto es, si
uν∇νuµ = 0 . (2.4.9)
En ese caso diremos que la curva es una geodésica afín para dicha conexión. Si desarrollamos se llegade forma inmediata a la ecuación de la geodésica afín:
d2xµ
dσ2+ Γµνρ
dxν
dσ
dxρ
dσ= 0 . (2.4.10)
8En matemáticas es típico llamar conexión al operador derivada covariante∇.

Capítulo 2. Nociones y bases matemáticas 11
Nótese que ser o no geodésica no es, estrictamente hablando, una caracterísca de la trayectoria sinode la curva, es decir, de la parametrización elegida. De modo que, si consideramos una trayectoriaS sobre la variedad: o bien S admite una parametrización (o curva) γi (σ) geodésica afín o no existedicha parametrización. Si estamos en el primer caso, diremos que tenemos una trayectoria autoparalelay a las curvas que la generan las llamaremos pre-geodésicas afines, pues o son geodésicas o lo son salvouna reparametrización. La geodésica afín es una pre-geodésica afín en particular, aquella que verifica(2.4.10).
En general, las pre-geodésicas afines satisfacen una ecuación del tipo
d2xµ
dσ2+ Γµνρ
dxν
dσ
dxρ
dσ= λ(σ)
dxµ
dσ, (2.4.11)
para alguna función λ, o lo que es lo mismo, que el transportado paralelo de la velocidad sea propor-cional a ella misma [Figura 2.4.2]:
uν∇νuµ = λ(σ)uµ . (2.4.12)
Y será una geodésica en el caso λ = 0.
2.4.3. Curvatura y torsión
Es importante notar que el transporte paralelo, fijada la conexión y los puntos inicial y final, puededepender o no de la curva sobre la que se efectúe. El conmutador de derivadas covariantes da cuentade esa diferencia; si se aplica a un tensor cualquiera se llega a:
[∇µ, ∇ν ]Hρ1...ρrλ1...λs
= R ρ1µνσ Hσ...ρr
λ1...λs+ ...+R ρr
µνσ Hρ1...σλ1...λs
−R σµνλ1
Hρ1...ρrσ...λs
− ...−R σµνλs Hρ1...ρr
λ1...σ
−Tσµν∇σHρ1...ρr
λ1...λs, (2.4.13)
donde hemos introducido dos objetos:
o El tensor de torsión, que es un tensor (1, 2) que representa la parte antisimétrica de la conexiónen los índices inferiores:
Tσµν := Γσµν − Γσνµ . (2.4.14)
Las conexiones con torsión cero (i.e. simétricas en sus índices inferiores) se denominan libres detorsión. La consecuencia de la existencia de torsión es que al transportar un vector de la base alo largo de otro y el segundo a lo largo del primero, los extremos de los vectores transportadosno cierren el cuadrilátero.
o El tensor de curvatura de Riemann es un tensor de tipo (1, 3) definido
R ρµνλ := ∂µΓρνλ − ∂νΓρµλ + ΓρµσΓσνλ − ΓρνσΓσµλ , (2.4.15)
y que contiene toda la información sobre la curvatura de la variedad. Como se aprecia en ladefinición, es antisimétrico en los dos primeros índices. Si R ρ
µνλ = 0 en toda la variedad se diceque es una variedad plana o sin curvatura. Nótese que, por el caracter tensorial, R ρ
µνλ = 0 esindependiente de las coordenadas elegidas (el 0 del espacio vectorial es invariante bajo cambiosde base).
A partir del tensor de Riemann pueden obtenerse, contrayendo parejas de índices, tres tensores 2-covariantes independientes9,
R(1)µλ := R ν
µνλ , R(2)µν := gανg
λβR αµβλ = R λ
µλ ν , R(3)µν := R λ
µνλ , (2.4.16)
9Obsérvese que para construir R(2)µν necesitamos una métrica en la variedad.

12 2.5. Desviación geodésica
Figura 2.5.1: Base {uµ, sµ} sobre una hipersuperficie generada por geodésicas afines (trazos gruesos).
los cuales contienen información parcial sobre la curvatura de la variedad, es decir, pueden ser nulosy, sin embargo, haber curvatura. En función de la conexión afín se expresan:
R(1)µλ = ∂µΓννλ − ∂νΓνµλ + ΓνµσΓσνλ − ΓννσΓσµλ , (2.4.17)
R(2)µν = gανg
λβ(∂µΓαβλ − ∂βΓαµλ + ΓαµσΓσβλ − ΓαβσΓσµλ
), (2.4.18)
R(3)µν = ∂µΓλνλ − ∂νΓλµλ (Antisimétrico) , (2.4.19)
A R(1)µλ se le llama tensor de Ricci y como aparecerá bastante lo denotaremos Rµλ por sencillez. Con
la ayuda de la métrica podemos construir las trazas de estos tensores:
R ≡ R(1) = −R(2) , R(3) = 0 , (2.4.20)
de las cuales la única independiente no-trivial, R, se denomina escalar de Ricci o curvatura escalar.
2.5. Desviación geodésica
Sea (M, Γ) una variedad afinmente conectada. A lo largo de todo este apartado cuando hablemosde geodésicas nos estaremos refiriendo a geodésicas afines correspondientes a la conexión Γ.
Consideremos en una región de nuestra variedad una familia de geodésicas {γη(λ)} que se extien-den por una hipersuperficie bidimensionalH(λ, η), donde λ se mueve en los valores de los diferentesparámetros de las curvas de la familia y η etiqueta el desplazamiento transversal (podríamos decirque nos diferencia una geodésica de otra). Es lícito construir dos vectores, el tangente a las curvas yotro que de cuenta de la separación de las geodésicas que representaremos
uµ =∂xµ
∂λ, sµ =
∂xµ
∂η. (2.5.1)
Está claro que sobre la superficie H , las etiquetas (λ, η) constituyen unas coordenadas muy na-turales para referirnos a los puntos de la misma. Y los vectores anteriores constituyen una base decoordenadas sobre la hipersuperficie [ver figura 2.5.1], es decir, uµ = ∂λ y sµ = ∂η , cumpliendo queel corchete de Lie10 se anula, [∂λ, ∂η] = 0. Una consecuencia inmediata de esto último es la regla:
uµ∇µsν = sµ∇µuν , (2.5.2)
que resulta útil para la derivación de (2.5.4), al igual que la condición de geodésica afín
uµ∇µuν = 0 . (2.5.3)
La velocidad de receso entre geodésicas (con la que se separan) vendrá dada por uµ∇µsν , y la desvia-ción geodésica se define como la aceleración relativa (covariante) de separación de geodésicas, es decir,
10Que se define: [V, W]µ := V ν∂νWµ −W ν∂νV µ.

Capítulo 2. Nociones y bases matemáticas 13
uµ∇µ [uµ∇µsν ]. Dicha aceleración se traduce físicamente en una fuerza de marea entre las partículasque recorren las geodésicas. El desarrollo de esta expresión para una conexión general (ver [24]) noslleva a:
uµ∇µ [uµ∇µsν ] = −R λµνρ s
µuνuρ + uµ∇µ[Tλνρu
νsρ]. (2.5.4)
Aquí vemos que la fuerza de marea entre partículas en la hipersuperficie es un efecto geométrico, locual casa con la interpretación que hace la Relatividad General de la gravedad.
2.6. Métricas y conexión
Ahora vamos a unir las dos estructuras que ya hemos revisado y vamos a considerar una variedadpseudoriemanniana afínmente conectada (M, g, Γ).
2.6.1. Conexiones métricas
Se dice que una conexión es métrica (o metrizable o compatible con la métrica) si la derivadacovariante asociada se anula idénticamente sobre el tensor métrico:
∇µgλρ = 0 , (2.6.1)
objeto al que (salvo el signo) se le llama tensor de metricidad Qµλρ := −∇µgλρ. Obsérvese que essimétrico en sus dos últimos índices.
Para una conexión de este tipo, el tensor de Riemann adquiere antisimetría en sus dos últimosíndices como puede verse aplicando el conmutador de derivadas covariantes sobre la métrica,
0 = [∇µ, ∇ν ] gλρ = −R σµνλ gσρ −R σ
µνρ gλσ − Tσµν����:0∇σgλρ = −Rµνλρ −Rµνρλ ⇔ Rµνλρ = −Rµνρλ .
(2.6.2)Bajo estas condiciones, todas sus contracciones se reducen a una, el tensor de Ricci Rµν :
Rµν := R νµνλ = −R(2)
µν , R(3)µν = 0 . (2.6.3)
Elegida una conexión compatible con la métrica diremos que nos hallamos ante una variedad (o teoría)de Riemann-Cartan.
Una consecuencia inmediata de la compatibilidad con la métrica (2.6.1) es que el producto escalarde dos vectores transportados paralelamente a lo largo de una curva (pongamos, con velocidad uµ)es invariante a lo largo de la curva:
uµ∇µ (VνWν)
(2.6.1)= gλνu
µ∇µ(V λW ν
)= gλν u
µ∇µV λ︸ ︷︷ ︸0
W ν + gλνVλ uµ∇µW ν︸ ︷︷ ︸
0
= 0 , (2.6.4)
es decir, el transporte paralelo es una isometría.
2.6.2. Conexión de Levi-Civita
A partir de la métrica podemos obtener los símbolos de Christoffel definidos:{ρµν
}=
1
2gρσ (∂µgσν + ∂νgµσ − ∂σgµν) . (2.6.5)
El lema fundamental de la geometría riemanniana afirma que:
“En cualquier variedad pseudoriemanniana equipada con una métrica gµν , existe una única co-nexión Γρµν que es, a la vez, compatible con gµν y libre de torsión; y la llamaremos conexión deLevi-Civita”.

14 2.6. Métricas y conexión
Las componentes de dicha conexión quedan completamente determinadas por la métrica y coin-ciden con los símbolos de Christoffel11:
Γρµν =1
2gρσ (∂µgσν + ∂νgµσ − ∂σgµν) ≡
{ρµν
}. (2.6.6)
Un par de propiedades:
o Bajo la conexión de Levi-Civita, el tensor de Riemann adquiere simetría bajo intercambio delos dos primeros índices con los dos últimos y, como consecuencia, el tensor de Ricci se vuelvesimétrico:
Rµνλσ = Rλσµν , Rµν = Rνµ . (2.6.7)
Si a esto le sumamos la antisimetría de Rµνλσ en los dos primeros (por construcción), antisime-tría en los dos últimos (por ser Γρµν compatible con la métrica) y las llamadas primera y segundaidentidad de Bianchi que, respectivamente, en este caso tienen la forma:
Rµνλσ + Rµλσν + Rµσνλ = 0 , o bien Rµ[νλσ] = 0 (2.6.8)
∇µRνλσρ + ∇µRνσρλ + ∇µRνρλσ = 0 , o bien ∇µRν[λσρ] = 0 (2.6.9)
todo ello nos conduce a que el tensor de Riemann tiene 112D
2(D2 − 1) componentes indepen-dientes bajo la conexión de Levi-Civita (donde D es la dimensión de la variedad).
o Como consecuencia inmediata de (2.6.6), las geodésicas métricas y afines coinciden y, a su vez,esto implica que trayectorias autoparalelas coinciden con las críticas. Para el caso concreto detrayectorias temporales, tenemos que “partículas de prueba que verifiquen el principio de mí-nima acción (trayectorias críticas) siguan las trayectorias más rectas (autoparalelas) en el es-paciotiempo”, lo cual es uno de los argumentos físicos típicos para seleccionar Levi-Civita deentre todas las demás conexiones afines. Obsérvese que no hemos dicho que la Levi-Civita seala única conexión que cumple esto; hay más, tal y como veremos a lo largo del trabajo.
La conexión de Levi-Civita simplifica considerablemente los cálculos geométricos y es la que sueleelegirse por defecto. Sin embargo, veremos que esta elección no es tan trivial.
2.6.3. Descomposición de una conexión afín general
No es dificil comprobar que en una variedad pseudoriemanniana cualquier conexión afín puedeexpresarse del siguiente modo:
Γρµν = Γρµν +K ρµν + L ρ
µν , (2.6.10)
donde Γ es la conexión de Levi-Civita y donde hemos definido los siguientes tensores:
K ρµν =
1
2gρσ (Tσµν + Tνσµ − Tµνσ) (Tensor de contorsión) , (2.6.11)
L ρµν =
1
2gρσ (Qµνσ +Qνσµ −Qσµν) . (2.6.12)
Como vemos la conexión afín no transforma como tensor por culpa de los símbolos de Christoffel,pues el resto es tensorial.
11Obsérvese que el objeto{ρµν
}se construye a partir de la métrica y, a priori, no tiene nada que ver con ninguna conexión.
En general usaremos la notación anterior, salvo cuando nos interese ver los símbolos de Christoffel como componentes de unaconexión, caso en el que los denotaremos Γρµν . Es decir, ambas notaciones se refieren el mismo objeto pero usar una u otra nosayudará a entender e interpretar mejor lo que estamos haciendo.

Capítulo 2. Nociones y bases matemáticas 15
2.7. Principio de acción estacionaria
En física, la forma más usual y, quizás más elegante, de derivar teorías es a partir de un princi-pio variacional; usualmente llamado de mínima acción aunque, más correctamente, tendríamos quehablar de un principio de acción estacionaria. Dicha acción es un funcional que se construye a partir dela densidad lagrangiana L de nuestra teoría12 que depende de los campos físicos (conexiones, tensores,espinores,...) χ de la misma:
S[χ, ∂χ] =
ˆL(χ, ∂χ)
√|g|dDx , (2.7.1)
siendo√|g|dDx el elemento de volumen invariante (g = detg). Nótese que estamos admitiendo que,
a lo sumo, hay primeras derivadas de los campos; de ahora en adelante, y por mayor simplicidad enla escritura omitiremos ∂χ, sobreentendiéndose que pudiera haber en L hasta primeras derivadas. Siefectuamos una variación de los campos (tal que δχ = 0 en el borde del dominio) e imponemos elprincipio de acción estacionaria δS = 0,
0 =
ˆδ(L√|g|)
dDx
=
ˆ ∂(L√|g|)
∂χδχ+
∂(L√|g|)
∂ (∂µχ)δ (∂µχ)
dDx
(por partes) =
ˆ ∂(L√|g|)
∂χ− ∂µ
∂(L√|g|)
∂ (∂µχ)
δχdDx (2.7.2)
y como esto es cierto ∀δχ se obtienen las ecuaciones de Euler-Lagrange13:
δSδχ≡∂(√|g|L
)∂χ
− ∂µ
∂(√|g|L
)∂(∂µχ)
= 0 . (2.7.3)
Es claro que habrá una ecuación de Euler-Lagrange para cada (componente de cada) campo inde-pendiente, de modo que es importante saber qué campos son independientes en nuestra teoría. Estaidea va a ser central en nuestro estudio posterior.
Podría haberse hecho una derivación análoga para lagrangianas más generales que dependan dederivadas de cualquier orden de los campos. Para ello remitimos a la bibliografía [26].
12Estrictamente hablando, la densidad lagrangiana es el producto√|g|L. Además, por sencillez en el lenguaje, nos referire-
mos a L simplemente como lagrangiana o lagrangiano.13Nótese que la derivada ∂µ externa en el segundo término afecta también a los campos, no solo a la dependencia explícita
en xµ. Es decir, a pesar de la notación, es una derivada total.

3 Dinámica de la Relatividad General bajolos formalismos métrico y de Palatini
De ahora en adelante, seaM un espaciotiempo. Es decir, mientras no digamos lo contrario asumimosque tenemos una métrica lorentziana y que la variedad es orientable temporalmente.
3.1. Punto de partida: acción y métodos variacionales enRelatividad General
Consideremos una acción general de gravedad acoplada a la materia del tipo
S =
ˆdDx
√|g| (Lgrav(g, Γ) + Lmatt(χ, g, Γ)) , (3.1.1)
donde Lgrav representa la lagrangiana del campo gravitatorio que nosotros consideraremos igual alde Einstein-Hilbert con conexión arbitraria 1
2κR, pero que podría incluir correcciones (por ejemplode tipo Lovelock) y Lmatt es la lagrangiana de la materia que viene dada por ciertos campos χ yque pueden estar acoplados entre sí mediante g y con la curvatura y/o la conexión Γ mediante, porejemplo, derivadas covariantes o productos por R.
Los formalismos variacionales con los que trabajaremos1 son:
o Formalismo métrico (o de segundo orden). En él se asume que la conexión es la de Levi-Civita, demodo que la dependencia en la conexión desaparece y tendríamos simplemente
S =
ˆdDx
√|g| (Lgrav(g) + Lmatt(χ, g)) , (3.1.2)
y, como consecuencia, las siguientes ecuaciones de movimiento:
• Ecuación para la métrica: que se corresponderá con las ecuaciones de Einstein para ciertotensor energía-momento (generalizadas en el caso de que el casoLgrav no sea el de Einstein-Hilbert).
• Ecuación para los campos de materia.
o Formalismo de Palatini (o de primer orden). Ahora la conexión es en principio arbitraria. Y ten-dríamos como ecuaciones de movimiento las mismas de antes, y se añade una más:
• Ecuación para la conexión. Esta ecuación proporciona soluciones entre las cuales no tie-ne por qué estar la de Levi-Civita, como ya mencionamos. Esto quiere decir que ambosmétodos en el caso más general no tienen por qué proporcionar la misma física.
En este trabajo no vamos a considerar lagrangianos de gravedad más alla de Einstein-Hilbert, es decir,nuestro marco de trabajo estará constituido, en principio, por las teorías del tipo
S =
ˆdDx
√|g|(
1
2κR+ Lmatt(χ, g, Γ)
). (3.1.3)
1Existen otros como el “bimétrico” propuesto por Goenner en 2010 [10].
16

Capítulo 3. Dinámica de la Relatividad General bajo los formalismos métrico y de Palatini 17
y, de hecho, salvo en el último capítulo §6 en el que nos aventuraremos a estudiar el campo de Diraclibre en espacios curvos, nuestros lagrangianos de materia NO dependerán de la conexión2 De modoque, de ahora en adelante, sobreentenderemos Lmatt ≡ Lmatt(χ, g, �SΓ) y, salvo cuando trabajemos conel campo de Dirac, nuestra acción será de la forma:
S =
ˆdDx
√|g|(
1
2κR+ Lmatt(χ, g)
). (3.1.4)
Notas previas a nuestro estudioAntes de comenzar el análisis vamos a resumir cómo vamos a estructurar el resto del capítulo:
1. Sección 3.2. Aquí hallaremos para una acción (3.1.4) las ecuaciones de movimiento de los cam-pos y de la métrica por ambos formalismos.
2. Sección 3.3. En el apartado anterior, a la hora de comparar, hemos admitido que entre las so-luciones de la ecuación de la conexión está la Levi-Civita. En este apartado obtendremos laecuación de la conexión y comprobaremos que efectivamente la de Levi-Civita Γ es solución.
De ahora en adelante usaremos la siguiente notación para objetos construidos a partir de la conexión:
o Tal y como veníamos haciendo desde el principio del trabajo, usaremos ˚ si provienen de laconexión de Levi-Civita (los emplearemos en el formalismo métrico): Γλµν , Rµν , R, ∇ρ, ...
o Con ¯ nos referiremos a una solución cualquiera de la ecuación de la conexión: Γλµν , Rµν , R, ∇ρ,...
o Sin nada nos referiremos a una conexión completamente arbitraria (no necesariamente soluciónde ninguna ecuación): Γλµν , Rµν , R,∇ρ, ...
Por último mostrar los dos lagrangianos de materia con los que particularizaremos los resultados:
o Campo escalar real (campo de espín 0) con un potencial mínimamente acoplado a la gravedad:
Lφ(φ, g) =1
2∇µφ∇µφ− V (φ) . (3.1.5)
donde estamos llamando ∇µ = gµν∇ν . Es inmediato ver que la conexión no aparece pues paraun escalar∇µφ = ∂µφ.
o Campo electromagnético libre (campo de espín 1 sin masa) mínimamente acoplado a la grave-dad:
Le.m.(A, g) = −1
4FµνF
µν , (3.1.6)
con Fµν = ∇µAν−∇νAµ el tensor electromagnético3, que coincide con el tensor en el caso planoFµν = ∂µAν − ∂νAµ
Para otros tipos de materia como el campo de Dirac (espín 1/2) veremos que la conexión aparecepor fuerza en el lagrangiano (al menos una parte de ella, la asociada a la parte antisimétrica de laconexión de espín). Este es el caso que, como ya anunciamos anteriormente, dejaremos para el finaldel trabajo pues requiere de una matemática algo más sofisticada.
2No consideraremos en el presente trabajo lagrangianos no-mínimamente acoplados al campo gravitatorio (con términosde curvatura por ejemplo); entendiendo por mínimo acoplo a la gravedad la preescripción clásica de sustituir ηµν , ∂µ, dDx,... porgµν , ∇µ (con conexión arbitraria),
√|g|dDx, ... en el lagrangiano plano, con el objetivo de que sea covariante la versión del
mismo en espacio curvo. Obsérvese, así mismo, que mínimo acoplo no implica que la conexión no aparezca en Lmatt, comoocurre en caso del campo de Dirac.
3Estamos admitiendo mínimo acoplo pero, a diferencia del campo escalar, aquí admitimos Levi-Civita en la definición deFµν . Si lo hiciéramos con una conexión general tendríamos
Fµν = ∇µAν −∇νAµ = ∇µAν − ∇νAµ − T ρµνAρ ,
con T ρµν la torsión. Y, por tanto, perderíamos la invariancia gaugeAµ → Aµ+∂µΛ característica del campo electromagnéticoFµν (Γ).

18 3.2. Ecuaciones de los campos y la métrica mediante ambos formalismos
3.2. Ecuaciones de los campos y la métrica mediante ambosformalismos
La acción en la que vamos a centrar nuestro estudio es la ya mencionada acción de Eintein-Hilbertmínimamente acoplada a cierto campo de materia χ (podrían ser varios):
S =
ˆdDx
√|g|[
1
2κR+ Lmatt(χ, g)
]= SEH + Smatt . (3.2.1)
3.2.1. Ecuación de movimiento de los campos
Dado que Lmatt no depende de la conexión y ni LEH de los campos de materia χ, las ecuacionesde Euler-Lagrange para estos serán:
∂ρ
(√|g|∂Lmatt(χ, g)
∂ (∂ρχ)
)−√|g|∂Lmatt(χ, g)
∂χ= 0 , (3.2.2)
en ambos formalismos. Para el campo escalar (3.1.5) y el campo electromagnético (3.1.6) se obtienen,respectivamente:
∇2φ = −V ′(φ) , ∇µFµλ = 0 . (3.2.3)
3.2.2. Ecuación de Einstein en el formalismo métrico
La ecuación de Einstein sí depende a priori del formalismo, así que estudiaremos ambos por se-parado. En este caso resolveremos mediante al formalismo métrico, partiendo de
S =
ˆdDx
(1
2κ
√|g|R+
√|g|Lmatt
). (3.2.4)
Efectuamos una variación en la métrica (inversa) gµν → gµν + δgµν y la variación de la acción será
δS =
ˆ [1
2κδ(√|g|gρλRρλ
)+ δ
(√|g|Lmatt
)]dDx
=
ˆ 1
2κ
∂(√|g|gρλ
)∂gµν
Rρλ +∂(√|g|Lmatt
)∂gµν
(δgµν) dDx+1
2κ
ˆ √|g|gρλδRρλ dDx . (3.2.5)
Imponemos el principio de acción estacionaria δS = 0, luego
0 =
ˆ ∂(√|g|gρλ
)∂gµν
Rρλ + 2κ∂(√|g|Lmatt
)∂gµν
(δgµν) dDx+
ˆ √|g|gρλδRρλ dDx . (3.2.6)
El último término, tal y como se demuestra en el apéndice §A.2 es nulo, de modo que al ser arbitrariala variación de la métrica llegamos a la nulidad del integrando:
∂(√|g|gρλ
)∂gµν
Rρλ = −2κ∂(√|g|Lmatt
)∂gµν
. (3.2.7)
Calculamos el primer miembro un poco más en detalle. Emplearemos las propiedades
∂√|g|
∂gµν= −1
2
√|g|gµν ,
∂gρλ
∂gµν= δρ(µδ
λν) , (3.2.8)

Capítulo 3. Dinámica de la Relatividad General bajo los formalismos métrico y de Palatini 19
donde hemos introducido el simetrizador de índices A(µBν) = 12 (AµBν +AνBµ); así nos queda:
∂(√|g|gρλ
)∂gµν
Rρλ = −1
2
√|g|gµνR+
√|g|δρ(µδ
λν)Rρλ
=√|g|(Rµν −
1
2gµνR
). (3.2.9)
En el último paso hemos aplicado el objeto δρ(µδλν) sobre el tensor Rρλ que, esencialmente, simetriza
sus índices, pero como estamos bajo la conexión de Levi-Civita, el tensor de Ricci ya es simétrico yδρ(µδ
λν) actúa como la identidad sobre el subespacio de tensores simétricos.
Sustituyendo en (3.2.7) y pasando el√|g| al otro miembro, la ecuación del campo gµν nos lleva a
las ecuaciones de Einstein:Rµν −
1
2gµνR = −κτmatt
µν , (3.2.10)
donde hemos introducido el tensor energía-momento (de Hilbert) asociado a Lmatt que se define:
τmattµν :=
2√|g|
δSmatt
δgµν, (3.2.11)
y que en función de la lagrangiana queda:
τmattµν =
2√|g|
∂(√|g|Lmatt
)∂gµν
= 2∂Lmatt
∂gµν− gµνLmatt , (3.2.12)
que es simétrico por definición en sus dos índices.
3.2.3. Ecuación de Einstein en el formalismo de Palatini
La ecuación de Euler-Lagrange para la métrica se simplifica bastante por no haber dependenciaen las derivadas de gρλ y queda:
0 =δ
δgρλ
[√|g|(
1
2κR+ Lmatt
)]=
1
2κ
∂(√|g|R
)∂gρλ
+∂(√|g|Lmatt
)∂gρλ
, (3.2.13)
Si introducimos ahora el tensor energía momento que habíamos definido en (3.2.12)
1√|g|
∂(√|g|R
)∂gρλ
= −κτmattµν , (3.2.14)
Y, análogamente a como hicimos en el formalismo métrico,
1√|g|
∂(√|g|gρλ
)∂gµν
Rρλ = −1
2gµνR+ δρ(µδ
λν)Rρλ , (3.2.15)
y, como ahora el tensor de Ricci no tiene por qué ser simétrico, el simetrizador se traslada a sus índicesy obtenemos la ecuación de Einstein en el formalismo de Palatini:
R(µν) −1
2gµνR = −κτmatt
µν . (3.2.16)

20 3.3. Ecuación de la conexión
3.2.4. Formalismo métrico como caso particular a nivel de ecuaciones deEinstein
La ecuación de la conexión (3.3.11), como veremos, tiene como solución particular la conexión deLevi-Civita, por lo que, tomándola podemos observar que los tensores de Einstein obtenidos por am-bos formalismos coinciden. La pregunta es, ¿ocurre lo mismo con los tensores de energía momento?Por definición:
τmattµν = 2
∂Lmatt
∂gµν− gµνLmatt . (3.2.17)
expresión independiente de la conexión, por lo que son completamente equivalentes.Como ejemplo, mostramos los tensores energía-momento para el campo escalar (3.1.5) y el campo
electromagnético (3.1.6),
τφµν = ∂µφ∂νφ+ gµνV (φ)− gµν1
2(∂φ)
2, (3.2.18)
τ e.m.µν = −FµλF λ
ν +1
4gµνFρλF
ρλ , (3.2.19)
y las ecuaciones de Einstein (sin traza) correspondientes:
R(µν) = −κ(∂µφ∂νφ−
2
D − 2gµνV (φ)
), (3.2.20)
R(µν) = κ
[FµλF
λν −
1
2(D − 2)gµνFρλF
ρλ
]. (3.2.21)
Lo que nos faltaría por ver es, en el caso de que hubiera más soluciones de la ecuación de la cone-xión, aparte de la Levi-Cita, ¿qué ecuaciones de Einstein proporcionan? La respuesta a esta preguntala veremos más adelante en el punto §(5.3) y será sorprendente.
3.3. Ecuación de la conexión
Partimos de la acción correspondiente:
S =
ˆdDx
√|g|[
1
2κR+ Lmatt(χ, g)
]. (3.3.1)
Efectuamos una variación en la conexión Γρµν → Γρµν + δΓρµν y la variación de la acción será
δS ≡ δSEH =1
2κ
ˆdDx
√|g|δR =
1
2κ
ˆdDx
√|g|gµνδRµν . (3.3.2)
Luego todo el interés radica en hallar δRµν . Para ello usamos la identidad de Palatini [ver la deduc-ción en §A.1],
δRµν = ∇µ(δΓλλν
)− ∇λ
(δΓλµν
)+ Tσµλ
(δΓλσν
), (3.3.3)
y se obtiene:
δSEH =1
2κ
ˆdDx
√|g|gµν
[∇µ(δΓλλν
)− ∇λ
(δΓλµν
)+ Tσµλ
(δΓλσν
)], (3.3.4)
donde vemos la variación de la acción en forma explícitamente covariante pues las derivadas cova-riantes, la torsión y la variación de la conexión afín transforman bien bajo CGC. La idea ahora es abrirlas derivadas covariantes e integrar por parte las derivadas parciales. El resultado es:
δSEH =
ˆ √|g|(δΓλµν
){−[
1
2gστgρν∇ρgστ + ∇σgσν + T ρσρg
σν
]δµλ
+1
2gστgµν∇λgστ + ∇λgµν + T ρλρg
µν + gσν Tµσλ
}. (3.3.5)

Capítulo 3. Dinámica de la Relatividad General bajo los formalismos métrico y de Palatini 21
Y para que se anule esta integral para toda variación de la conexión, debe ocurrir que
−[
1
2gστgρν∇ρgστ + ∇σgσν + T ρσρg
σν
]δµλ+
1
2gστgµν∇λgστ+∇λgµν+T ρλρg
µν+gσν Tµσλ = 0 , (3.3.6)
A continuación procederemos a simplificarla, sin embargo, ya puede verse que la conexión deLevi-Civita la satisface pues, sencillamente, hace cero todos los términos (todos contienen o una tor-sión o una derivada covariante de la métrica). Agrupamos términos:
1
2gστ
(gµν∇λgστ − gρν∇ρgστδµλ
)+(∇λgµν − ∇σgσνδµλ
)+(T ρλρg
µν − T ρσρgσνδµλ
)+ gσν Tµσλ = 0 .
(3.3.7)La ecuación (3.3.7) nos dice que el tensor del primer miembro es cero, por lo que sus trazas también
deben ser cero. Hallando dichas trazas buscamos relaciones que nos permitan simplificarla. Contra-yendo (3.3.7) con δµλ :
Traza δµλ :1
2gστgλν∇λgστ + ∇λgλν + T ρλρg
λν =1
D − 1gσν Tλσλ . (3.3.8)
El corchete de la ecuación de la conexión (3.3.6) es justamente lo que acabamos de calcular, por loque podemos sustituirlo:
1
2gστgµν∇λgστ + ∇λgµν + T ρλρg
µν − 1
D − 1gσν T ρσρδ
µλ + gσν Tµσλ = 0 . (3.3.9)
El siguiente paso será intentar poner gµν∇λgµν en función de la torsión. Extraemos la otra traza:
Traza gµν : gµν∇λgµν =2D
D − 1Tσλσ , gµν∇λgµν = − 2D
D − 1Tσλσ . (3.3.10)
Si sustituimos en (3.3.9) y operamos, llegamos a la forma final de la ecuación de la conexión:
∇λgµν − gσµTσνλ −1
D − 1gµν T
σσλ −
1
D − 1gλµT
σσν = 0 . (3.3.11)
Insistir una vez más en que la conexión de Levi-Civita es una solución de esta ecuación pero,como veremos, no es la única. A su resolución y a la interpretación de las soluciones, dado su interés,dedicaremos un capítulo entero. Pero antes, vamos a presentar la Relatividad General desde otropunto de vista (“desde el espacio tangente”). Este nuevo marco es equivalente al que hemos usado,por lo que nos proporcionará la misma dinámica; pero su interés va más alla: solo con él podremosintroducir espinores en el espaciotiempo.

4 Relatividad General desde el espaciotangente
4.1. Formalismo de los Vielbein
4.1.1. Concepto de Vielbein
Consideremos un espaciotiempo y un punto p del mismo. En el espacio tangente correspondienteen ese punto TpM, podemos elegir una base, la cual será de uno de los siguientes tipos:
o Holónoma (o de coordenadas). Si existe un abierto de p y una carta alrededor del mismo, talesque, los vectores de la base pueden escribirse ∂
∂xµ , siendo xµ las coordenadas asociadas a lacarta. Puede demostrarse que una base es holónoma si y solo si cumple [∂µ, ∂ν ]
ρ= 0 bajo
cualquier conexión.
o No holónoma. Si no está asociada a ningunas coordenadas.
Una base ortonormal en general no es una base de coordenadas. Piénsese en el plano R2 con la métricaeuclídea y con la conexión de Levi-Civita por sencillez. Por ejemplo, la base ortonormal en esféricas{r, θ} no es la base holónoma asociada a las coordenadas esféricas, sino {r, rθ}.
Consideremos que establecemos en el espacio tangente una base ortonormal1 que denotaremos{ea} y sea {ea} su base dual. Como ya vemos venir, distinguiremos componentes en esta base res-pecto a la de coordenadas por los índices: griegos para la base holónoma y latinos para la base orto-normal. Existirá en los espacios tangente y cotangente un cambio de base que las relacione:
∂µ = eaµea ⇔ ea = eµa∂µ , dxµ = eµaea ⇔ ea = eaµdx
µ , (4.1.1)
a los elementos de la matriz de cambio de base eaµ se les llama Vielbein, siendo eµa la correspondientematriz inversa [ver imagen 4.1.1]. Obsérvese que la base {ea} no depende del punto de la variedad,son los Vielbein los que llevan toda la dependencia en el punto que caracteriza a ∂µ. Se puede com-probar fácilmente a partir de aquí que en todo punto:
eaµeµb = δab , eµae
aν = δµν . (4.1.2)
De este modo, los Vielbein nos permiten llevar componentes de tensores de una base a la otra, porejemplo:
Bµν = eµaBaν = eµae
νbB
ab . (4.1.3)
Lo cual podemos aplicar para relacionar las métricas (análogamente para la métrica inversa):
gµν(x) = eaµ(x)ebν(x)ηab , (4.1.4)
donde ηab = diag(1, −1, ..., −1) es la métrica de Minkowski D-dimensional en cartesianas.El índice griego del Vielbein eaµ transforma bien bajo CGC (es una 1-forma) y su índice latino bajo
transformaciones locales de Lorentz2 (TLL), es decir, bajo cambios de base ea → e′a ortonormales:
eaν(y) =∂xµ
∂yνeaµ(x) , e′aµ(x) = Λab(x)ebµ(x) . (4.1.5)
1Un detalle importante pero que no emplearemos explícitamente es que si en un punto p tenemos una de estas basesortonormales, las componentes de la conexión de Levi-Civita expresadas respecto de esta se anulan en p, lo que implica quela curvatura asociada es localmente cero. A estas se las llama coordenadas normales [16]. En nuestro caso, hemos cubierto elespaciotiempo con estas bases y, físicamente, tienen una importante interpretación: son observadores localmente inerciales (losque no sienten la gravedad).
2Transforma en la representación vectorial de su álgebra. Ver §6.1.
22

Capítulo 4. Relatividad General desde el espacio tangente 23
Figura 4.1.1: Cambio de base en el tangente mediante los Vielbein.
como vemos, la transformación de Lorentz depende del punto de la variedad en el que estemos (deahí que la llamemos “local”). Esto último se extiende a tensores cualesquiera: los índices griegostransformarán bajo Diff(M) y los griegos bajo el grupo de Lorentz.
4.1.2. Conexión de espín y curvatura de espín
Ya sabemos cómo construir una derivada que, actuando sobre los campos tensoriales del espa-ciotiempo, transforme bien bajo CGC: la que denotamos ∇µ y que involucra la conexión afín Γρµν .Con una filosofía análoga, buscamos una derivada sobre los tensores en el tangente Ha1...ar
b1...bsque
transforme tensorialmente bajo TLL:
DµHa...
b... = ∂µHa...
b... + ω aµc Hc...
b... + ...(índices de arriba)...
− ω cµb H
a...c... − ...(índices de abajo)... , (4.1.6)
donde hemos introducido la conexión de espín ω bµa que, bajo CGC, transforma como una 1-forma
(índice griego), pero bajo una TLL xa → x′a = Λabxb sigue la regla:
ω bµa −→ ω′ b
µa = Λbd(Λ−1)caω
dµc − (Λ−1)ca∂µΛbc , (4.1.7)
Mediante el conmutador de derivadas covariantes se obtiene, al igual que con la conexión afín, untensor de curvatura:
[Dµ, Dν ]Ha...b... = R a
µνc Hc...b... + ...(índices de arriba)...
−R cµνb H
a...c... − ...(índices de abajo)... , (4.1.8)
habiéndose definidoR bµνa := ∂µω
bνa − ∂νω b
µa − ω cµa ω
bνc + ω c
νa ωb
µc , (4.1.9)
que denominaremos tensor de curvatura de espín y que es un tensor 2-covariante sobre la variedad y(1, 1) sobre el tangente. Es importante resaltar que en (4.1.8) no aparece un término de tipo “torsiónpor derivada covariante” como ocurría con la conexión afín.
Sobre las contracciones de este tensor remitimos a los apéndices §B.1. Para nuestro estudio solonecesitaremos dos de ellas:
Rµa ≡ R(1)µa = eνbR b
µνa , R(2) aµ = eνcη
dcR aµνd , (4.1.10)
así como la única contracción total (de todos los índices) del tensor R bµνa independiente que llama-
remos escalar de curvatura de espín:R = ηabeµbe
νcR c
µνa . (4.1.11)

24 4.2. Acción en el espacio tangente
4.1.3. El postulado del Vielbein
Consideremos un objeto con índices griegos y latinos. Si efectuamos∇µ (oDµ) sabemos que segui-rá transformando bien bajo CGC (o TLL), pero no bajo TLL (o CGC). Nuestra idea ahora es construirun nuevo operador que llamaremos derivada completamente covariante y que, combinando ambos tiposde conexión, siga preservando las reglas de transformación de los objetos sobre los que se aplica:
DρHµ...a...
ν...b... = ∂ρHµ...a...
ν...b...
+ΓµρσHσ...a...
ν...b... + ...(índices griegos de arriba)...
−ΓσρνHµ...a...
σ...b... − ...(índices griegos de abajo)...
+ω aρc Hσ...c...
σ...b... + ...(índices latinos de arriba)...
−ω cρb Hσ...a...
σ...c... − ...(índices latinos de abajo)... (4.1.12)
Si se piensa, tenemos dos descripciones: una con la conexión afín, el tensor de Riemann, ...; otracon la conexión de espín y la curvatura de espín. Y ambas descripciones no están relacionadas a priori.Como lo que buscamos es tener otra descripción alternativa de la misma física, hemos de imponeruna condición para que queden ligadas. Enunciamos así el postulado del Vielbein3:
Postulado del Vielbein (PV)La derivada completamente covariante de los Vielbein es nula:
(PV) ≡ Dµeλa = 0 . (4.1.13)
Es inmediato comprobar que (4.1.13) equivale a
ω bµa
(PV)= Γρµνe
νaebρ − eνa∂µebν , Γλµν
(PV)= eaνe
λbω
bµa + eλb∂µe
bν . (4.1.14)
Y así pueden relacionarse el tensor de Riemann de la variedad con el tensor de curvatura de espín:
R bµνa
(PV)= eρae
bλR
λµνρ ≡ R b
µνa , (4.1.15)
y, a partir, de aquí es fácil comprobar que:
Rµν ≡ eaνRµa(PV)= Rµν , R (PV)
= R . (4.1.16)
De modo que ya no hay que distinguir R’s de R’s y con los Vielbein ligamos la curvatura afín con lade espín. Para más detalles, remitimos al apéndice §B.2.
4.2. Acción en el espacio tangente
En la acción de Einstein-Hilbert la lagrangiana depende de la métrica y la conexión (que se puedenconsiderar relacionadas en el caso del formalismo métrico). Ahora, al emplear la descripción alterna-tiva en el tangente buscamos expresar la acción en términos de los Vielbein y de la conexión de espín.Partimos de la acción:
S =1
2κ
ˆR√|g|dDx =
1
2κ
ˆηaceµae
νbR b
µνc (ω)√|g|dDx . (4.2.1)
que, bajo el postulado del Vielbein, equivale a la de Einstein-Hilbert. La curvatura de espín, como seve en su definición (4.1.9), depende solo de la conexión de espín y de sus derivadas. Nos falta expresar√|g| como función de {eµa, ω c
νb }. Para ello basta con tomar determinantes en
gµν = eaµebνηab . (4.2.2)
3A veces se habla de “primer postulado del Vielbein” porque también existe un segundo postulado del Vielbein que consisteen imponer la compatibilidad con la métrica de la conexión afín, es decir, ∇µgνλ = 0. Bajo los dos postulados se llega a quenecesariamente la conexión de espín es compatible con la métrica de Minkowski (Dµηab = 0), lo cual conduce principalmentea la antisimetría de la conexión de espín ωµab = −ωµba. Esto tiene consecuencias sobre los tensores de curvatura. Véase §B.2.

Capítulo 4. Relatividad General desde el espacio tangente 25
Y teniendo en cuenta que detη = sgn(det g), se tiene
|e| =√|g| . (4.2.3)
donde hemos llamado e al determinante del Vielbein eaµ. Con ello, obtenemos la forma final de laacción:
SEH =
ˆLEH |e| dDx =
1
2κ
ˆηaceµae
νbR b
µνc (ω) |e| dDx . (4.2.4)
4.3. Formalismo de primer orden desde el tangente
La filosofía aquí es la misma que en el caso del formalismo de Palatini usual, solo que ahora,admitimos que la conexión de espín y los Vielbein son independientes. Nos disponemos a variar laacción (4.2.4) acoplada a la materia:
S =
ˆ [1
2κeµae
νb |e| ηacR b
µνc (ω) + Lmatt
]|e|dDx , (4.3.1)
donde seguimos tomando como lagrangiano de materia uno del tipoLmatt(χ, g) reescrito en términosde Vielbein y de la conexión de espín (al no depender de la conexión afín, tampoco dependerá de estaúltima); por lo que Lmatt(χ, e
µaeνbηab), es decir, los Vielbein solo aparecen en combinaciones4 del tipo
eµaeνbηab , lo cual nos permitirá emplear:
∂
∂gµν≡ ∂
∂ (eµaeνbηab)
=1
2ηab
(ebν
∂
∂eµa+ eaµ
∂
∂eνb
). (4.3.2)
4.3.1. Ecuación para los Vielbein. Ecuaciones de Einstein
Como la lagrangiana no depende de las derivadas de los Vielbein, la ecuación de Euler-Lagrangees muy simple
0 =∂ (|e| LEH)
∂eλd+∂ (|e| Lmatt)
∂eλd
=1
2κηacR b
µνc (ω)∂
∂eλd[eµae
νb |e|] +
∂ (|e| Lmatt)
∂eλd. (4.3.3)
Hacemos aparte la derivada:
∂
∂eλd[eµae
νb] = δµλδ
daeνb + δνλδ
db eµa , (4.3.4)
∂ |e|∂eλd
= sgn(e)∂e
∂eλd= −sgn(e)eedλ = − |e| edλ , (4.3.5)
donde en el penúltimo paso hemos usado la propiedad (donde N es una matriz invertible):
∂ det N
∂(N−1)ij= −(det N)N j
i . (4.3.6)
Y, operando, la ecuación (4.3.3) queda:
R dλ −R(2) d
λ − edλR = −κ 2
|e|∂ (|e| Lmatt)
∂eλd. (4.3.7)
4Con el campo de Dirac veremos que esto no es cierto, pues este se construye directamente con los Vielbein LDirac(χ, e) yla métrica plana y no puede reescribirse únicamente en función de gµν .

26 4.3. Formalismo de primer orden desde el tangente
Bajamos todos los índices y multiplicamos por 12 , llegando a las ecuaciones de Einstein mixtas (un
índice griego y uno latino)
1
2
(Rµa −R(2)
µa
)− 1
2ηade
dµR = −κtmatt
µa , (4.3.8)
donde hemos definido el tensor energía-momento respecto al Vielbein:
tmattµa :=
1
|e|ηad
δSmatt
δeµd=
1
|e|ηad
∂ (|e| Lmatt)
∂eµd, (4.3.9)
que, usando (4.3.5) se puede expresar
tmattµa = ηad
∂Lmatt
∂eµd− edµηadLmatt , (4.3.10)
Para recuperar las ecuaciones de Einstein usuales, utilizamos el postulado del Vielbein y debería-mos obtener lo mismo que con el formalismo de Palatini [§3.2.3]. Lo imponemos y contraemos coneaν :
1
2
(Rµν −R(2)
µν
)− 1
2gµνR = −κtmatt
µν . (4.3.11)
Deberían ser las ecuaciones de Einstein obtenidas en §3.2.3 pero hay dos problemas que se solucio-nan empleando que tanto la conexión como los campos deben estar on-shell (i.e. que verifiquen suscorrespondientes ecuaciones del movimiento):
o Tensor de Einstein
Los tensores de curvatura que aparecen en la ecuación de Einstein no son cualesquiera, debenestar evaluados en las soluciones de la ecuación de la conexión. Adelantamos la propiedad(5.2.7) de dichas conexiones, la cual nos conduce a:
1
2
(Rµν −R(2)
µν
)Γ=Γ
=1
2
(Rµν − R(2)
µν
)(5.2.7)=
1
2
(Rµν + Rνµ
)= R(µν) . (4.3.12)
o Tensor energía-momento
Por otro lado el tensor energía-momento tmattµν no es igual a τmatt
µν , de hecho no es simétrico en µy ν . Es justamente su parte simétrica la que coincide con τmatt
µν :
tmatt(µν) = eaνηab
∂Lmatt
∂eµb+ eaµηab
∂Lmatt
∂eνb− gµνLmatt
(4.3.2)= 2
∂Lmatt
∂gµν− gµνLmatt =: τmatt
µν . (4.3.13)
Sin embargo, como la lagrangiana de materia no depende de la conexión de espín, mientras loscampos estén on-shell, la parte antisimétrica de tmatt
µν se anula [ver apéndices §A.5] y por tanto:(tmattµν
)on−shell
= τmattµν . (4.3.14)
Luego con Γλµν y los campos de materia on-shell, la ecuación (4.3.11) resulta coincidir con las ecuacio-nes de Einstein que obtuvimos sin recurrir a los Vielbein:
R(µν) −1
2gµνR = −κτmatt
µν . (4.3.15)

Capítulo 4. Relatividad General desde el espacio tangente 27
4.3.2. Ecuación general para la conexión de espín
Calcularemos ahora la ecuación de movimiento para la conexión de espín y, vía el postulado delVielbein, la transformaremos en una ecuación para la conexión afín. De nuevo, el lagrangiano de ma-teria no va a afectar a la ecuación de la conexión, así que nos olvidamos de ese término. Consideramospues exclusivamente el lagrangiano de Einstein-Hilbert
L =1
2κeµae
νbηacR b
µνc (ω) . (4.3.16)
Pretendemos comprobar que por este otro camino y bajo el postulado del Vielbein se obtiene la mismaecuación para la conexión que la obtenida en el capítulo anterior. Para ello efectuamos una variaciónen la conexión de espín ω b
µa → ω bµa + δω b
µa , que hará que la acción varíe según
δS =1
2κ
ˆdDx |e| ηaceµaeνbδR b
µνc . (4.3.17)
La variación deR bµνc viene dada por
δR bµνa = Dµδω
bνa −Dνδω
bµa = Dµδω
bνa −Dνδω
bµa + Tσµνδω
bσa . (4.3.18)
como se demuestra en los apéndices §A.3. Operando llegamos a:
δS =1
κ
ˆdDx
(δω b
νc
)|e|{ηacDµ
(e[νaeµ]b
)− 1
2ηacT νµσe
µbeσa
−e[νaeµ]b
(ηacedλDµe
λd + ηacω d
µd − ω caµ − ω ac
µ − ηacTσµσ)}
. (4.3.19)
Teniendo en cuenta que:
ω baµ + ω ab
µ = Dµηab , ω c
µc =1
2ηabDµη
ab , (4.3.20)
puede expresarse de forma explícitamente covariante:
δS = 1κ
´dDx
(δω b
νc
)|e|{ηacDµ
(e
[νaeµ]b
)− 1
2ηacT νµσe
µbeσa
−e[νaeµ]b
(ηacedλDµe
λd + 1
2ηacηdeDµη
de −Dµηac − ηacTσµσ
)} . (4.3.21)
Y la ecuación de la conexión de espín queda:
Dµ
(e[νaeµ]b
)− 1
2T νµσe
µbeσa − e[ν
aeµ]b
(edλDµe
λd +
1
2ηdeDµη
de − Tσµσ)
+ ηace[νdeµ]bDµη
dc = 0 .
(4.3.22)Imponiendo el postulado del Vielbein, eliminamos los términos con Dµe
νa de (4.3.22):
− 1
2T νµσe
µbeσa − e[ν
aeµ]b
(1
2ηdeDµη
de − Tσµσ)
+ ηace[νdeµ]bDµη
dc = 0 , (4.3.23)
y esperamos, tras llevar a cabo ciertas transformaciones, que obtengamos la ecuación de la conexiónafín que obteníamos del formalismo Palatini. Para ello, tengamos en cuenta:
Dµηdc = edνe
cλDµg
νλ = edνecλ∇µgνλ , (4.3.24)
que, operando, nos conduce a:
0 =1
2gστ (gµν∇λgστ − δµλg
ην∇ηgστ )+gσλ (gµν∇ρgρσ − gην∇ηgµσ)+(T τλτg
µν − T τητgηνδµλ
)+gηνTµηλ .
(4.3.25)

28 4.3. Formalismo de primer orden desde el tangente
Y, de nuevo, procedemos a su simplificación extrayendo trazas. Comenzamos contrayendo µ y λ:
Traza δµλ : ∇ρgρσ =1
2(D − 3) gησgρτ∇ηgρτ + (D − 2)T ρηρg
ησ . (4.3.26)
Sustituyendo en nuestra ecuación:
0 =1
2gστ ((D − 2) gµν∇λgστ − δµλg
ην∇ηgστ )−gσλgην∇ηgµσ+(D − 1)T ρλρgµν−T ρηρgηνδ
µλ+gηνTµηλ .
(4.3.27)Ahora contraemos (4.3.27) en µ y ν y llegamos a
Traza gµν : gστ∇λgστ = − 2D
(D − 1)T ρλρ . (4.3.28)
Sustituyendo en (4.3.27) y bajando todos los índices, la ecuación de la conexión queda:
∇λgµν − gµσTσνλ −1
D − 1T ρρνgµλ −
1
D − 1T ρρλgµν = 0 , (4.3.29)
que coincide con (3.3.11). Como queríamos demostrar.

5 Conexiones de Palatini
En los capítulos anteriores, tanto “desde la variedad” [Capítulo §3] como “desde el espacio tan-gente” [Capítulo §4], hemos hallado las ecuaciones que nos decriben la dinámica de la métrica ylos campos de materia con los formalismos métrico y de Palatini. La ecuación de movimiento de lamateria era independiente de la conexión, pero no las ecuaciones de Einstein, pues dependen de lacurvatura. Posteriormente, hallamos la ecuación de la conexión y comprobamos que la de Levi-Civitaes solución; además vimos que, imponiendo esta última sobre las ecuaciones de Einstein del forma-lismo de Palatini, se obtienen las mismas que las del métrico. De modo que hay equivalencia totalentre las dinámicas descritas por ambos formalismos, al menos para el caso Levi-Civita. Sin embargo,queremos ir más allá. Nos proponemos ahora resolver la ecuación de la conexión que, a pesar de suaspecto enrevesado, es una ecuación algebraica y pueden hallarse sus soluciones explícitamente. Y,después, analizar cómo son las ecuaciones de Einstein bajo cualquiera de estas, ¿serán las mismas quepara el caso Levi-Civita?
5.1. Solución general de la ecuación de la conexión
Para resolver la ecuación de la conexión (3.3.11), primero llevamos la derivada covariante de lamétrica al otro miembro:
gσµTσνλ +
1
D − 1gµν T
σσλ +
1
D − 1gλµT
σσν = ∇λgµν . (5.1.1)
Dejamos explícita toda la dependencia en la conexión afín:
gσµ(Γσνλ − Γσλν
)+ (gµνδ
ρλ + gλµδ
ρν)
1
D − 1
(Γσσρ − Γσρσ
)= ∂λgµν − Γσλµgσν − Γσλνgµσ . (5.1.2)
Γσλµgσν + Γσνλgσµ + (gµνδρλ + gλµδ
ρν)
1
D − 1
(Γσσρ − Γσρσ
)= ∂λgµν . (5.1.3)
Aquí vemos claramente lo que ya anunciábamos: se trata de una ecuación (variando los índices seríaun sistema de ecuaciones) algebraica. A continación, la escribimos en sus tres formas posibles con losíndices movidos en orden cíclico:
Γσλµgσν + Γσνλgσµ + (gµνδρλ + gλµδ
ρν)
1
D − 1
(Γσσρ − Γσρσ
)= ∂λgµν ,
Γσνλgσµ + Γσµνgσλ +(gλµδ
ρν + gνλδ
ρµ
) 1
D − 1
(Γσσρ − Γσρσ
)= ∂νgλµ ,
Γσµνgσλ + Γσλµgσν +(gνλδ
ρµ + gµνδ
ρλ
) 1
D − 1
(Γσσρ − Γσρσ
)= ∂µgνλ . (5.1.4)
Si le restamos a la primera la tercera y sumamos la segunda:
Γρνλ =1
2gµρ (∂λgµν − ∂µgνλ + ∂νgλµ)− 1
D − 1δρλT
σσν . (5.1.5)
El primer término del segundo miembro es la conexión Levi-Civita en función de la métrica, de modoque las conexiones de Palatini son todas aquellas con la forma
Γρµν = Γρµν −1
D − 1δρν T
σσµ . (5.1.6)
Si tomamos torsión:T ρµν = Γρµν − Γρνµ =
1
D − 1
(δρµT
σσν − δρν Tσσµ
). (5.1.7)
29

30 5.2. Tensor de Riemann y sus contracciones
A partir de ahora, por simplicidad, llamaremosAµ := − 1D−1 T
σσµ de modo que las soluciones quedan:
Γρµν = Γρµν +Aµδρν , T ρµν = Aµδρν −Aνδρµ . (5.1.8)
Y las derivadas covariantes de Γρµν y Γρµν están relacionadas según:
∇µHρ1...ρrν1...νs = ∇µHρ1...ρr
ν1...νs + (r − s)AµHρ1...ρrν1...νs , (5.1.9)
que, aplicado sobre la métrica nos da
∇µgνλ = −2Aµgνλ , ∇µgνλ = 2Aµgνλ . (5.1.10)
Otras soluciones especiales son:
o Soluciones simétricas
Si imponemos que Γρµν = −Γρνµ, esto es, que sea libre de torsión, se obtiene que Γρµν = Γρµν . Esdecir, la única solución simétrica debe ser compatible con la métrica y, por tanto, Levi-Civita.
o Soluciones compatibles con la métrica
Si imponemos que Γρµν sea compatible con la métrica, la ecuación (5.1.10) automáticamente nosdice queAµ = 0 ⇔ Tµµλ = 0, lo cual, si nos fijamos en (5.1.7), nos lleva a que la torsión es cero.Como consecuencia, la conexión debe ser, necesariamente, la de Levi-Civita.
La curiosa concluión es que cualquier conexión de Palatini que no sea la de Levi-Civita, por fuerza,ni es libre de torsión ni compatible con la métrica, tal y como se comprueba en [15]. Esto justifica porqué usualmente en la bibliografía aparece la de Levi-Civita como única solución, pues se suele partirde una conexión sin torsión (ver [21, 26]).
5.2. Tensor de Riemann y sus contracciones
Dadas dos conexiones relacionadas según Γ′ρµν = Γρµν +Ξλµρ, se puede demostrar que los tensoresde Riemann correspondientes están relacionados según
R′ λµνρ = R λ
µνρ +∇µΞλνρ −∇νΞλµρ + TσµνΞλσρ + ΞλµσΞσνρ − ΞλνσΞσµρ . (5.2.1)
En nuestro caso,R λµνρ = R λ
µνρ + Fµνδλρ , (5.2.2)
donde1
Fµν = ∇µAν − ∇νAµ = ∂µAν − ∂νAµ . (5.2.3)
Las tres contracciones son: (R λµλρ =:
)Rµρ = Rµρ + Fµρ , (5.2.4)(
gαρgλβR α
µβλ =:)
R(2)µρ = −Rρµ , (5.2.5)(
R λµρλ =:
)R(3)
µρ = DFµρ . (5.2.6)
La tercera es antisimétrica, así que al simetrizar sus índices obtenemos cero, sin embargo, simetri-zando los otros dos llegamos a una interesante propiedad:
R(µρ) =1
2
(Rµρ − R(2)
µρ
). (5.2.7)
1Estamos usando la notación Fµν yAµ por la similitud con el campo electromagnético.

Capítulo 5. Conexiones de Palatini 31
Y resulta que en nuestras ecuaciones de Einstein lo que aparece es la parte simétrica del tensor deRicci y el escalar de curvatura:
R(µρ) = Rµρ, R = R , (5.2.8)
donde hemos usado en (5.2.4) que Fµν es un tensor antisimétrico y que con conexión de Levi-Civitael tensor de Ricci es simétrico, por lo que R(µρ) = Rµρ.
Puede, asimismo, demostrarse usando la segunda identidad de Bianchi generalizada,
∇µR λνρσ +∇νR λ
ρµσ +∇ρR λµνσ − T τµνR λ
ρτσ − T τνρR λµτσ − T τρµR λ
ντσ = 0 , (5.2.9)
que la versión 1-covariante 1-covariante del tensor de Einstein no tiene divergencia, como en el casode Levi-Civita:
∇νG νµ ≡ ∇ν
[gρνR(µρ) −
1
2δνµR
]= 0 . (5.2.10)
Debido a la incompatibilidad con la métrica, a diferencia de la Levi-Civita, esto no se mantiene, porejemplo, para el tensor de Einstein 2-contravariante:
∇νGµν ≡ ∇ν[R(µν) − 1
2gµνR
]= 2AνGµν . (5.2.11)
Ambigüedad en la curvatura
Ya hemos visto que la curvatura para una conexión de Palatini difiere de la de Levi-Civita por untérmino que va con una 2-formaFµν , que recuerda al tensor electromagnético. Sabiendo de la simetríagauge del electromagnetismo, es de esperar que haya una simetría análoga subyacente.
Consideremos dos conexiones de Palatini cuyos campos Aµ difieran en un término pure gauge:
Γ(1)ρµν = Γρµν +A(1)
µ δρν ,
Γ(2)ρµν = Γρµν +A(2)
µ δρν ,con A(2)
µ = A(1)µ + ∂µΛ (5.2.12)
o lo que es lo mismo, que su diferencia es:
Γ(2)ρµν − Γ(1)ρ
µν = ∂µΛδρν . (5.2.13)
Fácilmente puede comprobarse que las curvaturas asociadas coinciden:
R(1)λ
µνρ = R(2)λ
µνρ . (5.2.14)
Acabar diciendo que esta simetría de la curvatura no es una “buena” simetría para toda la teoríaen el sentido de que la torsión, que es una propiedad del espaciotiempo, no permanece invariante.
5.3. Ecuaciones de movimiento bajo las conexiones de Palatini
A nivel de ecuaciones de movimiento de los campos y de la métrica los resultados obtenidos hansido:
o Las ecuaciones de los campos no dependían del formalismo, así que, ya sabemos que todas lasconexiones de Palatini proporcionan las mismas.
o Las ecuaciones de Einstein del formalismo de Palatini ya vimos que coincidían con las del métri-co en el caso Levi-Civita. Pero si observamos las ecuaciones resultantes de ambos formalismos
R(µν) −1
2gµνR = −κτmatt
µν (formalismo de Palatini) ,

32 5.4. Análisis de las geodésicas
Rµν −1
2gµνR = −κτmatt
µν (formalismo metrico) ,
y utilizamos las recien calculadas (5.2.8) obtenemos que son idénticas. Es decir, con el forma-lismo de Palatini se obtienen varias conexiones (como, en principio, sería esperable) y todasellas proporcionan las mismas ecuaciones de movimiento para la métrica y el campo que elformalismo métrico.
Como vemos, existe una simetría en la física, la cual es mucho más profunda que la que posee elelectromagnetismo por ejemplo. En este último tenemos libertad para elegir el potencial electromag-nético, pero no es una libertad total, nos la limita el gauge; solo podemos hacer Aµ → Aµ + ∂µΛ (conΛ un escalar), pues son las que mantienen invariante el campo Fµν que es físico. En nuestro caso,aunque Fµν se vea afectado por elecciones arbitrarias de Aµ, ello no repercute en las ecuaciones demovimiento. Es lícito entonces elegir el Aµ = 0 y poder disfrutar de las magníficas propiedades de laconexión de Levi-Civita.
5.4. Análisis de las geodésicas
Consideremos las trayectorias autoparalelas bajo una conexión de Palatini Γµρν cualquiera. Si laparametrizamos como geodésica afin γ(σ) debe satisfacer la ecuación:
x′′µ + Γµρνx′ρx′ν = 0 . (5.4.1)
donde estamos denotando B′ = dBdσ . O bien,
x′′µ + Γµρνx′ρx′ν = −Aρx′ρx′µ . (5.4.2)
Efectuamos un cambio de parámetro σ → τ
σ(τ) =
ˆ τ
0
e−Σ(τ1)dτ1 , (5.4.3)
y la ecuación (5.4.2) queda:
xµ + Γµρν xρxν = −
(Aρxρ +
dΣ
dτ
)xµ , (5.4.4)
Luego, si elegimos una parametrización en τ obtenida a partir de σ mediante (5.4.3) con
Σ(τ) = −ˆ τ
0
Aρxρdτ1 , (5.4.5)
obtenemos:xµ + Γµρν x
ρxν = 0 , (5.4.6)
que es la ecuación de la geodésica afín de la conexión de Levi-Civita (que coincide con las geodési-cas métricas del espaciotiempo, esto es, τ es una elección de tiempo propio). Este último resultadoes sorprendente, aunque quizás, con la reparametrización nos hemos podido perder por el camino.Veamos, de forma resumida lo que significa todo esto:
1. Tenemos un espaciotiempo equipado con una métrica, lo cual nos proporciona una serie detrayectorias críticas. Estas, o bien se parametrizaban con un parámetro general (pre-geodésicasmétricas generales) o, con una parametrización particulas, el tiempo propio, que nos llevaba alas geodésicas métricas.

Capítulo 5. Conexiones de Palatini 33
2. Por otro lado, de entre todas las conexiones compatibles con la teoría (las soluciones de la co-rrespondiente ecuación de Euler-Lagrange), hay una que es especial, la de Levi-Civita, cuyastrayectorias autoparalelas coinciden con las críticas.
3. Y lo que hemos hecho aquí es coger una trayectoria autoparalela de una conexión de Palatiniarbitraria, no necesariamente la de Levi-Civita, parametrizada como geodésica afín, y hemoshecho un cambio de parámetro, de forma que dejaría de ser una geodésica afín para dichaconexión; y resulta que hemos obtenido la ecuación de la geodésica afín para la de Levi-Civita,cuya imagen son las trayectorias autoparalelas de la Levi-Civita que son las críticas.
Conclusión:
o A nivel de trayectorias (mucho más importante desde el punto de vista físico, pues son loscaminos que siguen partículas de prueba):
Todas las conexiones de Palatini tienen exactamente las mismas trayectorias autoparalelas y coinci-den con las trayectorias críticas.
o A nivel de curvas:
Sean dos conexiones de Palatini Γ1 y Γ2, y una geodésica afín γ1(σ) de Γ1. Existe un cambio deparámetro γ1(σ(κ)) = γ2(κ) tal que la nueva curva obtenida, γ2, es geodésica afín de Γ2.
Una observación final interesante es que las conexiones de Palatini no son las únicas cuyas trayec-torias autoparalelas coinciden con las de la conexión de Levi-Civita. Tómense como ejemplo aquellasde la forma Γµρν +Aνδµρ .
5.5. Desviación geodésica
Hemos comprobado que no hay diferencias entre la trayectoria autoparalela por una u otra co-nexión. Por lo que, es lícito pensar que las fuerzas de marea entre partículas que recorran diferentesgeodésicas también coincida para cualquier conexión de Palatini. Pero vamos a demostrarlo explícita-mente. Como ya introdujimos en §2.5, estos efectos físicos vienen dados por la desviación geodésica,la cual es consecuencia de la curvatura y la torsión del espaciotiempo entre las dos geodésicas.
Consideremos un haz de geodésicas afines para una conexión de Palatini cualquiera que formanuna hipersuperficie de dimensión 2 en el espaciotiempo H(λ, η), siguiendo la notación para los pa-rámetros de §2.5. Ahora denotaremos los vectores base asociados a las coordenadas (λ, η) del modosiguiente:
xµ =∂xµ
∂λ, δxµ =
∂xµ
∂η. (5.5.1)
Recuérdese que, por ser un haz de geodésicas, en cualquier punto de la hipersuperficie xµ∇µxν = 0.La ecuación de la desviación geodésica es:
xµ∇µ[xν∇ν(δxµ)
]= −R λ
µνρ δxµxν xρ + xµ∇µ
[Tλνρx
νδxρ]. (5.5.2)
Efectuamos ahora una reparametrización del tipo (5.4.3)-(5.4.5) a nuevos parámetros (λ, η) →(τ, σ), la nueva base de la hipersuperficie es:
x′µ =∂xµ
∂τ, δxµ =
∂xµ
∂σ. (5.5.3)
Esta nueva familia de geodésicas (las trayectorias son las mismas, cambian las curvas) son tales queen todo punto de la hipersuperficie x′µ∇µx′ν = 0. La vieja base en función de la nueva queda:
xµ =∂τ
∂λx′µ +
∂σ
∂λδxµ ,
δxµ =∂τ
∂ηx′µ +
∂σ
∂ηδxµ . (5.5.4)

34 5.5. Desviación geodésica
Nuestro objetivo es comprobar que existen funciones ∂τ∂λ , ∂τ∂η , ∂σ∂λ y ∂σ
∂η tales que (5.5.2) sea equiva-lente a la ecuación de la desviación geodésica de la conexión de Levi-Civita:
x′µ∇µ[x′ν∇ν(δxµ)
]= −R λ
µνρ δxµx′νx′ρ . (5.5.5)
Para ello sustituimos la derivada covariante, el tensor de curvatura y las velocidades de la conexiónde Palatini en función de las de Levi-Civita y operamos. Por el camino se comprueba que para que eltérmino que va con el tensor de Riemann quede como nos interesa es necesario exigir
∂σ
∂λ= 0 , (5.5.6)
de modo que los vectores tangentes a las geodésicas quedan ligados de una forma muy simple: xµ =∂τ∂λx
′µ (un cambio de coordenadas a lo largo de la curva). A partir de ahora llamaremos F = ∂τ∂λ .
Operando, llegamos finalmente a la ecuación
0 =∂σ
∂ηF 2{x′µ∇µ
[x′ν∇ν(δxµ)
]+ R λ
µνρ δxµx′νx′ρ + Fµν δxµx′νx′λ
}+ E1x
′λ + E2x′ν∇ν(δxλ) ,
(5.5.7)donde se han definido los objetos E1 y E2 como sigue,
E1 =∂2F
∂λ∂η+ fλ
∂F
∂η+ fη
∂F
∂λ+
(∂fη∂λ
+ fηfλ
)F , (5.5.8)
E2 =∂
∂λ
(F∂σ
∂η
)+ fλF
∂σ
∂η, (5.5.9)
y se han introducido fλ = xµAµ y fη = δxµAµ. Lo que aparece entre llaves en (5.5.7) es lo quequeremos que sea igual a cero salvo un término molesto en el tensor Fµν . Pero este puede absorberseen E1 gracias a la propiedad:
∂σ
∂η
∂τ
∂λFµν δxµx′ν +
∂fη∂λ
=∂fλ∂η
, (5.5.10)
de modo que nuestro problema se reduce a anular
∂σ
∂ηF 2Fµν δxµx′ν + E1 =
∂2F
∂λ∂η+ fλ
∂F
∂η+ fη
∂F
∂λ+
(∂fλ∂η
+ fηfλ
)F , (5.5.11)
E2 =∂
∂λ
(F∂σ
∂η
)+ fλF
∂σ
∂η. (5.5.12)
Recuérdese que no queremos solución general, nos basta con una particular. Y, como puede com-probarse por sustitución, la elección(
∂τ
∂λ≡)F = e−
´ λ0xµAµdλ1 ,
∂σ
∂η= 1 , (5.5.13)
anula las dos expresiones anteriores. De modo que, la ecuación (5.5.2) puede reducirse a (5.5.5) sinmás que tomar el cambio de parámetros:
∂τ
∂λ= e−
´ λ0xµAµdλ1 ,
∂τ
∂ηlibre ,
∂σ
∂λ= 0 ,
∂σ
∂η= 1 , (5.5.14)
que nos conduciría a
xµ = e−´ λ0xµAµdλ1x′µ , δxµ = h(η, λ)x′µ + δxµ , (5.5.15)
con h una función arbitraria.Hemos logrado demostrar que la desviación geodésica se preserva al pasar de una geodésica a
otra, tal y como esperábamos, por ser las mismas trayectorias. Sin embargo, esta coincidencia es muyinteresante pues las conexiones de Palatini no tienen la misma curvatura [ver (5.2.2)] y esta participaen la desviación geodésica.

Capítulo 5. Conexiones de Palatini 35
5.6. Propiedad homotética
Si observamos con detenimiento la ecuación (5.1.9), que podemos reescribir proyectada sobre unacurva xµ,
xµ∇µHρ1...ρrν1...νs − x
µ∇µHρ1...ρrν1...νs = (r − s)xµAµHρ1...ρr
ν1...νs , (5.6.1)
vemos que la diferencia entre el transporte paralelo con una conexión de Palatini y la Levi-Civitaes un término proporcional al tensor considerado. Si particularizamos para un vector, vemos que elvector transportado paralelo tendrá la misma dirección en ambos casos pero diferirá en un factor2
(una homotecia):xµ∇µV ν − xµ∇µV ν = xµAµV ν . (5.6.2)
Es importante remarcar que el factor de homotecia xµAµ depende de la curva.Vamos a comprobar que cualquier conexión “homotética” (en este sentido) es, necesariamente,
una de nuestras conexiones de Palatini. Dada una conexión arbitraria Γρµν = Γρµν + kρµν , queremossu transporte a lo largo de una curva γ(λ) difiera del de Levi-Civita por un término proporcional alvector transportado:
xµkρµνVν = f(λ)V ρ , (5.6.3)
para cierta función escalar f(λ) (depende de la curva). Como esto debe cumplirse para todos los vec-tores de V ρ, se tiene que, necesariamente xµkρµν = f(λ)δρν . Si tomamos la traza en ρ y ν, y definimosAµ = 1
Dkρµρ, llegamos a f(λ) = xµAµ, que nos permite reescribir(5.6.3) del modo siguiente
xµkρµν = xµAµδρν , (5.6.4)
que, al verificarse para cualquier curva, nos lleva a que kρµν = Aµδρν y, por tanto, la forma general deuna conexión con esta propiedad homotética es precisamente la de una conexión de Palatini.
5.7. El problema de la indetectabilidad y la interpretación de lassoluciones de Palatini
Los resultados anteriores nos llevan a afirmar (de forma un tanto valiente) que la física que des-criben las diferentes soluciones de la ecuación de Palatini es la misma. Sin embargo no hemos dadouna prueba rigurosa de ello. Por ejemplo, una posibilidad sería que, aunque Fµν no repercuta en ladinámica, dado que afecta a la curvatura, quizás participe de manera no trivial en la energía del cam-po gravitatorio (de la cual seguimos actualmente sin tener una definición consensuada). Obsérvesetambién que podríamos hacer que aparezca física añadiendo términos a la lagrangiana que hagandinámico el campo Aµ.
Supongamos por un momento, que sí existiese algún tipo de efecto físico asociado a diferentesAµ. Vamos entonces a considerar una curva γ(σ) (observador) a lo largo de la cual está definido uncampo vectorial espacial V µ, cuyos valores en dos puntos: σ0 y σ1 estamos interesados en conocer.Para conexiones compatibles con la métrica sabemos que el transporte paralelo de vectores preservala norma, luego nos permite, al menos en módulo3, comparar V µ(σ0) y V µ(σ1), sin más que trans-portar el primero hasta el segundo y restarlos. Si ahora tuviésemos una conexión de Palatini general(no compatible con la métrica), afortunadamente sabemos que las direcciones se preservan por lapropiedad homotética. Pero lo anterior ya no nos sirve, pues el módulo del transportado V µP (σ1) (queni siquiera es un vector físico) no tiene por qué coincidir con el de V µ(σ0). ¿Esto implica que no hayforma de comparar si este ha cambiado o no al no conocer la conexión que “rige” el universo?
En absoluto, pues nos estamos empeñando en comparar un objeto físico con otro no-físico quedepende de la conexión. Si lo que queremos es saber si un campo ha cambiado o no en módulo,
2Se modifica la norma solo si el vector es temporal o espacial.3La torsión en general nos impide comparar direcciones pues a lo largo del transporte se perturban.

36 5.7. El problema de la indetectabilidad y la interpretación de las soluciones de Palatini
hemos de comparar los campos físicos, los que son “reales”. Nuestro observador deberá calculargµνV
µV ν(σ0), esperar un cierto tiempo hasta llegar al intante σ1 y medir de nuevo el módulo delcampo gµνV µV ν(σ1). Comparando ambos resultados podrá saber si el campo ha cambiado o no enmódulo, como consecuencia de la dinámica. Lo que parecía un problema era solo un malentendido.
Pero vamos a ver que a la hora de medir, aparecen problemas. Podríamos hacer dos plantea-mientos según cómo construyamos nuestra unidad de medida, los cuales rozan incluso el terrenofilosófico: (1.) un observador experimental (de interés físico) para el que la unidad es la longitud deuna barra de cierto material; (2.) un observador geométrico (curiosidad matemática si se quiere) quemide con la métrica y puede hacer transporte paralelo, el cual define su unidad en un punto y launidad en el resto es la primera transportada paralelamente con la conexión que él desee. Veamos elmismo problema desde los dos puntos de vista:
1. El observador experimental sería incapaz de detectar Aµ pues el transporte paralelo no es unaoperación que pueda llevarse a cabo de forma experimental. Nuestro observador con su barraen un punto mide el módulo de V µ y obtiene h; alcanza el otro y mide h. La conclusión es queel campo no ha cambiado. Y la gravedad no perturba la barra localmente pues a esas escalasadmitimos que las fuerzas dominantes son las que mantienen la integridad de la barra (electro-magnéticas y nucleares). Luego, este observador podrá estar seguro de que mide lo mismo en elsentido de que la dinámica no ha cambiado el campo en módulo. Pero nunca medirá los efectosde transporte paralelo.
2. Supongamos que nuestro observador geométrico registra gµνV µV ν(σ1) = gµνVµV ν(σ0) = h.
La incógnita surge cuando se pregunta en qué unidades está medido ese h, dado que la métricapodrá estar expresada en unas unidades en un punto y en otras en otro. Lo lógico sería esta-blecer dicha unidad y que sea la misma siempre, ¿cómo hacer esto? Nuestro observador eligeen un punto una unidad de longitud (la longitud de la barra de su compañero), y la transportacon una conexión compatible con la métrica a cada punto de la curva y, por las propiedadesde dichas conexiones, él sabe que la unidad es la misma en todos los puntos. Sin embargo, sila naturaleza se rigiese por una conexión de Palatini, que no es en general de este tipo, ¿cómosabemos si el valor h obtenido en σ1 está medido en las mismas unidades que el obtenido enσ0? Lo sabríamos si supiéramos cómo se transportan las unidades en ese espaciotiempo, peropartimos de que Aµ es desconocido y, de hecho, pretendemos detectarlo.
En resumen, parace no ser posible medir efectos deAµ, pues o bien no repercute en el procedimientoexperimental o lo necesitamos para hacer los cálculos (y lo desconocemos). Así que, a menos que seencuentre alguna otra situación en la que repercuta como mencionamos previamente, a efectos de loque hemos estudiado es completamente indetectable.
Sin embargo, vamos a intentar razonar si esto tiene algún sentido. Si reflexionamos un poco, elanálisis de geodésicas que llevamos a cabo previamente podría plantearse a la inversa: partimos dela geodésica afín de Levi-Civita γ(τ) y hacemos una reparametrización (somos libres de hacerlo)dτ = eΣ(σ)dσ, de modo que se obtiene:
x′′µ + Γµρνx′ρx′ν =
dΣ
dσx′µ . (5.7.1)
Nada nos impide definir dΣdσ
:= −Aρx′ρ, resultando una geodésica afín para cierta conexión que defi-nimos absorbiendo el segundo miembro en el término de la conexión de Levi-Civita:
x′′µ +(
Γµρν +Aρδµν)x′ρx′ν = 0 , (5.7.2)
donde hemos construido explícitamente la conexión de Palatini general Γµρν +Aρδµν .Parece ser que Aρ no es físico precisamente porque las reparametrizaciones no afectan a la físi-
ca. Y el formalismo de Palatini tiene codificada la libertad de reparametrizar una geodésica afín yseguir viéndola como una geodésica afín (pero, quizás, de otra conexión), de modo que el resultadoes la conexión “natural” de Levi-Civita más las que se obtendrían de absorber reparametrizaciones.¡Tenemos una única física y muchos modos de describirla!

6 Gravedad acoplada al campo de Dirac
El problema de la cosmología en los primeros instantes de vida del Universo está muy relaciona-do con la física de partículas. Cuando involucramos campos cuánticos en nuestra teoría relativista enespacios curvos, está claro que hemos de incluir las propiedades más fundamentales de dichos cam-pos (o, si se quiere, de sus excitaciones que interpretamos como partículas). Cuando introducimos elespín, además del tensor energía-momento, aparece un nuevo objeto que es tensor densidad de espín.Mientras que el primero está relacionado con la curvatura del espaciotiempo, el último repercutirá enla torsión [28].
Para introducir espinores, lo usual es hacerlo mediante una teoría de Einstein-Cartan-Kibble-Sciama (ECKS), que consiste en admitir una conexión compatible con la métrica pero con torsión. Deeste modo, al aplicar el formalismo de primer orden, podemos admitir que la acción es función ex-clusivamente de la métrica y la contorsión (en vez de la conexión) [véase la descomposición (2.6.10)],y tendremos entonces dos variaciones diferentes de la acción:
δSmatt
δgµν,
δSmatt
δK ρµν
. (6.0.1)
que se corresponderán, salvo factores, con el tensor energía-momento y al tensor densidad de espín,respectivamente.
Nosotros vamos a hacer un estudio más general, pues dejaremos que la conexión afín no seacompatible con la métrica.
6.1. El campo de Dirac en el espacio de Minkowski
Vamos a acoplar la gravedad al campo de Dirac. De modo que merece la pena hacer una brevepresentación de los objetos con los que nos manejaremos en este capítulo. Sobre el espacio plano deMinkowski D-dimensional, podemos definir diversos campos que viven en espacios de representa-ción de las representaciones del grupo de Poincaré ISO(D − 1, 1) que tiene la estructura:
ISO(D − 1, 1) = RD−1, 1 o SO(D − 1, 1) , (6.1.1)
y cuyo algebra de Lie se caracteriza por las siguientes reglas:
[Mab, Mcd] = iηadMbc − iηbdMac − iηacMbd + iηbcMad , (6.1.2)[Pa, Mbc] = iηabPc − iηacPb , (6.1.3)
[Pa, Pb] = 0 . (6.1.4)
donde Mab (antisimétrico) son los generadores del álgebra de Lorentz so(D − 1, 1) y Pa generan lastraslaciones.
En el tangente tenemos una estructura de espacio vectorial, por lo que las traslaciones no aparecencomo parte del grupo de isometrías. Solo tenemos aquellos elementos de ISO(D−1, 1) que mantieneninvariante el origen. Y ese es el grupo de Lorentz. Una transformación de Lorentz general puedeexpresarse en cierta representación como un operador
L?∗ =(e−
i2 θcdM
cd)?∗, (6.1.5)
donde θcd (antisimétrico) son los parámetros de la transformación y los índices ? y ∗ dependen de larepresentación. Para determinar los generadores para una representación concreta, hemos de llevar acabo una transformación infinitesimal de Lorentz:
e−i2 θcdM
cd
' 1− i
2θcdM
cd . (6.1.6)
37

38 6.2. El campo de Dirac en espacios curvos
Los tensores (de cualquier orden) transforman mediante la representación vectorial (sus productostensoriales) que viene dada por (
M cdvect
)ab
= i(ηcaδdb − ηdaδcb) . (6.1.7)
La representación vectorial de las transformaciones de Lorentz es aquella que hemos denotado enanteriores capítulos Λab = Lvect
ab. De este modo, para un vector contravariante:
ΛabVb = V a +
1
2θcd(η
caV d − ηdaV c) = V a + θabVb . (6.1.8)
Sin embargo, el grupo de espín Spin(D − 1, 1) (el recubridor del grupo de Lorentz) o, mejor di-cho, su álgebra de Lie, spin(D − 1, 1), admite representaciones espinoriales1. Dirac llevó a cabo laconstrucción de los generadores para dichas representaciones del siguiente modo:(
M cdspin
)AB≡(Σcd)AB
:=i
4[γc, γd]AB , (6.1.9)
donde las matrices γa son aquellas que satisfacen el álgebra de Clifford D-dimensional:
{γa, γb} ≡ γaγb + γbγa = 2ηab1 . (6.1.10)
La dimensión del espacio de representación de espinores (el rango en el que se mueven los índicesA, B,...) es2 2[D/2] y a los objetos que viven en él se les llama espinores de Dirac Ψ, que transforman deforma covariante bajo la representación espinorial de spin(D − 1, 1):3
Ψ′A = LspinABΨB , (6.1.11)
o, en versión infinitesimal,
δΨA = − i
2θcd(Σcd)AB
ΨB . (6.1.12)
Estos espinores de Dirac constituyen también el espacio de representación de la única representaciónirreducible de álgebra de Clifford en esa dimensión. Es curioso que a partir de estos ingredientes (lasmatrices gamma) pueda construirse una representación del grupo de espín.
Se define el conjugado de Dirac de un espinor de Dirac del siguiente modo:
Ψ := Ψ†γ0 , ΨA := Ψ†B(γ0)B
A, (6.1.13)
donde † denota hermítico conjugado (traspuesta-conjugada).Al trabajar con espinores aparecerán las matrices γa contraídas con otros objetos por la izquierda;
introducimos así la Feynman-slash, tan empleada en teoría cuántica de campos:
γaBa ≡��B . (6.1.14)
6.2. El campo de Dirac en espacios curvos
Cuando nos trasladamos del espacio plano de Minkowski a un espaciotiempo (curvo, en gene-ral), dejamos de estar respaldados por el grupo de Poincaré y el que gobierna ahora es el grupo dedifeomorfismos del espaciotiempo Diff(M). A diferencia del grupo de Poincaré, el de difeomorfis-mos no posee una acción natural sobre los espinores. Dicho de otro modo, no existe ninguna regla detransformación bajo CGC análoga a
V α =∂yα
∂xµV µ (6.2.1)
1Del mismo modo que su(2) contiene, además de las representaciones de so(3), las espinoriales sobre R3.2Con [D/2] estamos denotando la parte entera de D/2.3Emplearemos índices latinos en mayúscula para las componentes espinoriales.

Capítulo 6. Gravedad acoplada al campo de Dirac 39
para espinores [22]. Sin embargo, existe un modo de introducirlos en variedades curvas, y es apro-vechándonos de que el grupo de Lorentz actúa sobre el espacio tangente en cada punto con su baseortonormal (Minkowski), de modo que, podemos construir espinores localmente, trasladando el álge-bra de Clifford local en cada espacio tangente a la base de coordenadas del espaciotiempo con ayudade los Vielbein y, por consiguiente, los generadores:
γµ(x) = eµa(x)γa , (6.2.2){γµ, γν} = 2gµν1 , (6.2.3)
Σµν(x) =i
4[γµ(x), γν(x)] . (6.2.4)
A pesar de parecerlo, no es trivial la construcción anterior. No cualquier espaciotiempo admite loque se llama una estructura espinorial. Como puede verse en el capítulo de [22] dedicado a espinores,la topología del fibrado de las bases ortonormales influye en la existencia o no de dicha estructura(aquí se admite que el espaciotiempo es orientable y simplemente conexo).
6.3. Gravedad acoplada al campo fermiónico de Dirac
Nota: vamos a trabajar en todo momento bajo el postulado del Vielbein y procederemos mediante elformalismo de primer orden.
Nosotros admitiremos que estamos en las condiciones adecuadas para la construcción de espi-nores. Comenzamos introduciendo el lagrangiano de Einstein-Hilbert acoplado al campo de Dirac(libre):
S =
ˆ(LEH + LDirac)
√|g|dDx =
ˆ [1
2κηaceµae
νbR b
µνc (ω) + LDirac(e, ω, Ψ, Ψ)
]|e|dDx , (6.3.1)
donde el lagrangiano de Dirac en espacios curvos tiene la forma:
LDirac(e, ω, Ψ, Ψ) =i~2
Ψ��DspΨ− i~
2Dspν ΨγνΨ−mΨΨ , (6.3.2)
=i~2ΨB(γν)BAD
spν Ψ
A − i~2Dspν ΨB(γν)BAΨ
A −mΨAΨA . (6.3.3)
siendo m la masa del campo fermiónico. Estamos empleando la derivada covariante espinorial Dspµ que
actúa
Dspµ Ψ
A = ∂µΨA +
i
2ωµab
(Σab)A
BΨB , (6.3.4)
Dspµ ΨA = ∂µΨA −
i
2ωµabΨB
(Σab)B
A. (6.3.5)
Se ha de tener cuidado con la notación slash; recordamos, aunque debería intuirse, cómo funcionala “derivada slash” tanto en notación compacta como por componentes:
��DspΨ = γνDsp
ν Ψ , ��DspΨB = (γν)BAD
spν Ψ
A , (6.3.6)
Es importante observar que en LDirac aparece explícitamente la conexión de espín4. El lagrangiano deDirac puede expresarse5:
LDirac(e, ω, Ψ, Ψ) = eµaΘ aµ −
1
2ωµabS
µab −mΨΨ , (6.3.7)
4En la cual se halla codificada en la conexión afín del fibrado tangente. Recuérdese que nos hallamos bajo el primer postu-lado y ambas conexiones están relacionadas.
5Siguiendo unos pasos análogos a los de [20].

40 6.4. Ecuación de Dirac
con
Θ aµ =
i~2
(Ψγa∂µΨ− ∂µΨγaΨ
), (6.3.8)
Sµab =~2
Ψ{γµ, Σab
}Ψ . (6.3.9)
Teniendo en cuenta que Sµab es antisimétrico en sus dos últimos índices, concluimos que solamenteωµ[ab] va a contribuir al lagrangiano de Dirac. Hemos introducido el tensor Sµab que llamaremostensor de espín y que va a ser la novedad en la ecuación de la conexión, como veremos. Citamos acontinuación algunas de sus propiedades:
1. Componentes con iguales índices salvo permutación cíclica del tensor Sµab coinciden:
Sµab = Sbµa = Sabµ . (6.3.10)
2. Con la antisimetría en sus dos últimos índices y la propiedad anterior, deducimos que el tensorde espín (con todos los índices abajo y griegos) es una 3-forma sobre el espaciotiempo, i.e. esun tensor completamente antisimétrico. Si la dimensión del espaciotiempo es D = 3 se trata deuna forma de volumen, y con D < 3 es idénticamente nula.
6.4. Ecuación de Dirac
Derivamos las ecuaciones del campo. Como es habitual, admitiremos que los campos ΨA y ΨAson independientes y obtendremos la ecuación para cada uno de ellos.
ECUACIÓN DEL CAMPO ADJUNTO Ψ
La ecuación de Euler-Lagrange para ΨA nos da la ecuación del movimiento de ΨA y viceversa.El lagrangiano de Einstein-Hilbert no depende del campo espinorial por lo que prescindimos de él ytenemos:
0 = ∂µ
[|e| ∂LDirac
∂(∂µΨB)
]− |e| ∂LDirac
∂ΨB. (6.4.1)
Hallamos cada término por separado:
∂LDirac
∂ΨB=
∂
∂ΨB
(i~2ΨC(γν)CAD
spν Ψ
A − i~2Dspν ΨC(γν)CAΨ
A −mΨAΨA)
=i~2��DspΨB − i~
2
[−i2ωνab
(Σab)B
C
](γν)CAΨ
A −mΨB , (6.4.2)
∂LDirac
∂(∂µΨB)=
∂
∂(∂µΨB)
(i~2ΨC(γν)CAD
spν Ψ
A − i~2Dspν ΨC(γν)CAΨ
A −mΨAΨA)
= − i~2
(γµ)BAΨA . (6.4.3)
Luego, reuniendo todas las ecuaciones de movimiento (una para cada valor de B), en notación espi-norial la ecuación de Euler-Lagrange es la que sigue:
0 = ∂µ
[|e| −i~
2γµΨ
]− |e| i~
2��DspΨ + |e| i~
2
[−i2ωµabΣ
ab
]γµΨ + |e|mΨ . (6.4.4)
Desarrollando e introduciendo el conmutador:
i~��DspΨ−mΨ =i~2
{i2ωµabe
µc[γ
c ,Σab]− 1
|e|∂µ (|e|γµ)
}Ψ =:
i~2
ΞΨ . (6.4.5)

Capítulo 6. Gravedad acoplada al campo de Dirac 41
donde hemos llamado Ξ al objeto entre llaves que, teniendo en cuenta
[γc, Σab] = i(ηcaδbd − ηcbδad)γd = i(ηcaγb − ηcbγa) , (6.4.6)
se puede expresar
Ξ =
[−1
2eµcηabDµη
bc + Tλλµeµa +
1
2ηbcDµη
bceµa
]γa . (6.4.7)
Con todo ello la ecuación de Dirac queda:
i~��DspΨ−mΨ =i~2
[Tλλµe
µa +
1
2eµaηbcDµη
bc − 1
2ηabDµη
bceµc
]γaΨ . (6.4.8)
ECUACIÓN DEL CAMPO Ψ
Se razona de modo análogo al anterior y el resultado es la ecuación de movimiento:
i~Dspµ Ψγµ +mΨ =
i~2
[Tλλµe
µa +
1
2eµaηbcDµη
bc − 1
2ηabDµη
bceµc
]Ψγa . (6.4.9)
Con ambos campos on-shell es fácil comprobar que:
LDirac|Ψ,Ψ on−shell = 0 . (6.4.10)
6.5. Ecuaciones de Einstein
Las ecuaciones de Einstein se obtienen de efectuar la variación respecto al Vielbein:
0 =∂ [|e| (LEH + LDirac)]
∂eλd. (6.5.1)
Tenemos una lagrangiana que no depende de las derivadas de los Vielbein, de modo que llegare-mos a lo mismo que obtuvimos en (4.3.7) con el término del campo de Dirac:
1
2eaν
(Rµa −R(2)
µa
)− 1
2gµνR = −κ
(gλνe
λd
∂LDirac
∂eµd− gµνLDirac
)≡ −κeaνtDirac
µa . (6.5.2)
donde hemos definido el tensor energía-momento respecto al Vielbein del campo de Dirac, que vale
eaνtDiracµa =
i~2
ΨγνDspµ Ψ− i~
2Dspµ ΨγνΨ
−gµν(
i~2
Ψ��DspΨ− i~
2Dspν ΨγνΨ−mΨΨ
). (6.5.3)
Bajo el primer postulado del Vielbein se obtienen las ecuaciones de Einstein para la gravedad acopladaal campo de Dirac
1
2
(Rµν −R(2)
µν
)− 1
2gµνR = −κeaνtDirac
µa . (6.5.4)
Nótese que ahora no podemos efectuar Rµν − R(2)µν = 2R(µν), pues era una propiedad de las co-
nexiones de Palatini y ahora no sabemos si estas son soluciones de la ecuación de la conexión. Sinembargo, las soluciones que obtendremos de la ecuación de la conexión6, como veremos, siguen ve-rificando esta condición [ver ecuación (6.7.11)]. Así que las ecuación de Einstein quedan:
R(µν) −1
2gµνR = −κeaνtDirac
µa . (6.5.5)
6Las cuales denotaremos Γρµν y la misma notación emplearemos para las curvaturas y torsiones correspondientes.

42 6.6. Ecuación de la conexión de espín
Podríamos estar tentados a decir que eaνtDiracµa es simétrico cuando el campo de Dirac está on-shell,
pero no, y ello se debe a que el lagrangiano de materia depende de la conexión en este caso. Como secomprueba en los apéndices §A.5, será simétrico si y solo si δSDirac/δωµab = 0, es decir, si y solo si
0 =∂LDirac
∂ωµab= −1
2Sµab , (6.5.6)
que ocurre solo si no hay espín. De modo que la parte antisimétrica no se anula idénticamente, ydicha nulidad aparece como una propiedad impuesta por las ecuaciones (6.5.5):
Ψγ[µDspν] Ψ = Dsp
[µΨγν]Ψ . (6.5.7)
La parte simétrica de estas nos da las ecuaciones de Einstein propiamente dichas:
R(µν) − 12gµνR = −κ
[i~2 Ψγ(µD
spν)Ψ−
i~2 D
sp(µΨγν)Ψ
− i~2 gµνΨ�
�DspΨ + i~2 gµνD
spλ ΨγλΨ +mgµνΨΨ
] . (6.5.8)
Lo que sí ocurre con los campos on-shell, como ya vimos, es que el lagrangiano se anula, por lo queestas últimas ecuaciones se reducen a:
R(µν) −1
2gµνR = −κ i~
2
[Ψγ(νD
spµ)Ψ−D
sp(µΨγν)Ψ
]. (6.5.9)
6.6. Ecuación de la conexión de espín
Este es el punto clave para nuestro estudio. Si efectuamos una variación de la conexión de espínω bµa → ω b
µa + δω bµa , la acción (6.3.1) variará según:
δS = δSEH + δSDirac , (6.6.1)
El término δSEH viene dado por la expresión (4.3.21) y solo nos queda hallar la contribución dellagrangiano de Dirac:
δSDirac = −~4
ˆΨ{γa, Σcd
}Ψeνaηdb
(δω d
νc
)|e|dDx . (6.6.2)
Imponiendo el primer postulado e introduciendo el tensor de espín Sµab definido en (6.3.9):
δS = − 1κ
´dDx
(δω b
νc
)|e|[κ2 ηbdS
νcd + 12ηacT νµσe
µbeσa
+e[νaeµ]b
(12ηacηdeDµη
de −Dµηac − ηacTσµσ
)] . (6.6.3)
Conduciéndonos esto a la ecuación siguiente para la conexión:
− 1
2T νµσe
µbeσa − e[ν
aeµ]b
(1
2ηdeDµη
de − Tσµσ)
+ ηace[νdeµ]bDµη
dc =κ
2ηacηbdS
νcd . (6.6.4)
Expresión que puede transformarse en una ecuación idéntica a la obtenida para el caso Einstein-Hilbert [ec. (4.3.25)] pero con un término inhomogéneo que va con el tensor de espín:
1
2gστ (gµν∇λgστ − δµλg
ην∇ηgστ )+gσλ (gµν∇ρgρσ − gην∇ηgµσ)+T γλγgµν−T γηγgηνδ
µλ+gηνTµηλ = −κS νµ
λ .
(6.6.5)Y, del mismo modo, procedemos a hallar sus trazas. Sin embargo, dado que S µν
λ es antisimétrico,no va a contribuir a ninguna de ellas; por lo que estas serán las mismas que para el caso Einstein-Hilbert [§4.3.2]:

Capítulo 6. Gravedad acoplada al campo de Dirac 43
Traza δµλ : ∇ρgρσ =1
2(D − 3) gησgρτ∇ηgρτ + (D − 2)T ρηρg
ησ . (6.6.6)
Sustituyendo en nuestra ecuación:
1
2gστ ((D − 2) gµν∇λgστ − δµλg
ην∇ηgστ )−gσλgην∇ηgµσ+(D − 1)T ρλρgµν−T ρηρgηνδ
µλ+gηνTµηλ = −κS νµ
λ .
(6.6.7)Extraemos la otra traza que, de nuevo coincidirá con la de §4.3.2:
Traza gµν : gστ∇λgστ = − 2D
(D − 1)T ρλρ (6.6.8)
Sustituyendo en (6.6.7) y, tras simplificar y bajar los índices, se llega a la ecuación de la conexión:
∇λgµν − gµσTσνλ −1
D − 1T ρρνgµλ −
1
D − 1T ρρλgµν = κSλµν . (6.6.9)
6.7. Solución general
6.7.1. Resolución de la ecuación
Si tomamos la ecuación (6.6.9), disponemos en sus tres formas posibles con los índices movidosen orden cíclico, sumamos dos y restamos una como en §5.1 obtenemos
2Γσνλgσµ +2
D − 1gλµ (Γσσν − Γσνσ) = ∂λgµν − ∂µgνλ + ∂νgλµ + κSµνλ ,
donde en el último término hemos utilizado:
Sλµν − Sµνλ + Sνλµ =((((((Sµνλ − Sµνλ + Sνλµ = Sνλµ = Sµνλ . (6.7.1)
Finalmente, obtenemos la forma general de todas las conexiones afines compatibles con el lagran-giano de Einstein-Hilbert (gravedad pura sin correcciones) acoplado a un campo fermiónico de DiracΨ, que denotaremos con una virgulilla y llamaremos conexiones Dirac-Palatini:
Γρµν = Γρµν + Bµδρν +κ
2Sρµν , (6.7.2)
donde, análogamente al caso de Palatini para Einstein-Hilbert, hemos definido el vectorBµ = − 1D−1 T
σσµ.
Nótese que como el tensor Sρµν es fijo, la diferencia de dos conexiones Dirac-Palatini depende exclu-sivamente de los campos Bµ correspondientes.
La torsión asociada se obtiene de forma inmediata:
T ρµν = Bµδρν − Bνδρµ + κSµνλ , (6.7.3)
y las derivadas covariantes de Γρµν y Γρµν están relacionadas según:
∇µHρ1...ρrν1...νs = ∇µHρ1...ρr
ν1...νs+(r−s)BµHρ1...ρrν1...νs+
κ
2
(Sρ1µσH
σ...ρrν1...νs + ...− Sσµν1H
ρ1...ρrσ...νs − ...
).
(6.7.4)El cual, aplicado sobre la métrica, nos proporciona el tensor de metricidad:
∇µgνλ = −2Bµgνλ −κ
2
(Sσµνgσλ + Sσµλgνσ
), ∇µgνλ = 2Bµgνλ +
κ
2
(Sνµσg
σλ + Sλµσgνσ).
(6.7.5)

44 6.7. Solución general
Por último, mediante (4.1.14) se puede obtener la conexión de espín que descomponemos:
ω abµ = ω (ab)
µ + ω [ab]µ con
ω(ab)µ = Bµηab
ω[ab]µ = ω ab
µ + κ2S
abµ
. (6.7.6)
donde ω bµa es la conexión de espín asociada a la conexión de Levi-Civita por el (PV). Obsérvese que
lo que se admite usualmente, su antisimetría, implica hacer nulo el campo Bµ. Nosotros, al relajaresta condición, hemos obtenido un resultado más general. Las ecuaciones que derivamos son válidaspara cualquier valor de dicho campo.
6.7.2. Curvatura de las soluciones
De nuevo, empleando (5.2.1) con Ξρµν = Bµδρν + κ2S
ρµν , se llega a:
R λµνρ = R λ
µνρ + Fµνδλρ + κ∇[µSλν]ρ +
κ2
2Sλ[µ|σS
σ|ν]ρ , (6.7.7)
donde hemos introducido Fµν = ∇µBν − ∇νBµ.A continuación hallamos sus tres contracciones:
Rµν = Rµν + Fµν +κ
2∇λSλµν +
κ2
4SσλµSσλν (6.7.8)
R(2)µν = −Rνµ (6.7.9)
R(3)µν = DFµν +
κ2
2Sσλ[µSν]λσ (6.7.10)
Y de aquí obtenemos una propiedad idéntica a (5.2.7) que, como ya vimos, simplifica nuestro tensorde Einstein:
R(µν) =1
2
(Rµν − R(2)
µν
). (6.7.11)
6.7.3. Más propiedades de las soluciones
Vamos a hacer una revisión rápida sobre geodésicas y la diferencia entre transportes paralelos,para encontrar diferencias con las conexiones de Palatini, de una forma bastante superficial y sin en-trar en detalles (que dejaríamos para posteriores estudios). Para una conexión Dirac-Palatini generalla ecuación de la geodésica afín es:
x′′µ + Γµρνx′ρx′ν = −Bρx′ρx′µ . (6.7.12)
donde hemos suprimido el término κ2S
µρνx′ρx′ν por ser nulo, dada la antisimetría del tensor de es-
pín. Estamos en la misma situación que en caso Einstein-Hilbert. Mediante una reparametrizaciónpodemos obtener las geodésicas:
xµ +{µρν
}xρxν = 0 . (6.7.13)
Concluimos que, de nuevo, todas las conexiones Dirac-Palatini tienen las mismas trayectorias auto-paralelas y, también, las mismas que Levi-Civita (que son las críticas) aunque no sea solución.
Respecto al transporte paralelo de vectores, ahora comprobamos que la diferencia con la conexiónde Levi-Civita agrega un término de espín (i.e. de torsión) que altera completamente el campo:
xµ∇µV ν − xµ∇µV ν = xµBµV ν + xµκ
2SνµσV
σ . (6.7.14)

Capítulo 6. Gravedad acoplada al campo de Dirac 45
Sin embargo, como vimos, dos conexiones Dirac-Palatini difieren entre sí, al igual que en el casoEinstein-Hilbert, por un término que va con el campo no-dinámico:
xµ∇(1)µ V ν − xµ∇(2)
µ V ν = xµ(B(1)µ − B(2)
µ
)V ν . (6.7.15)
es decir, son homotéticas unas con respecto a otras, pero no con respecto a las de Levi-Civita.

7 Conclusiones
Concluimos recopilando los resultados más relevantes de nuestro estudio. En primer lugar, hemosresuelto mediante el formalismo de Palatini la teoría Einstein-Hilbert (libre y/o con materia indepen-diente de la conexión) y encontrado la forma general de todas las conexiones afines que verifican lacorrespondiente ecuación del movimiento:
Γρµν = Γρµν +Aµδρν , (7.0.1)
donde Aµ es un campo no-dinámico arbitrario. Hemos comprobado que todas las soluciones de estafamilia, para cada elección de Aµ, parecen describir la misma física. Las trayectorias autoparalelascoinciden con las críticas en todos los casos y, como estas últimas son independientes de la conexión,concluimos que las geodésicas afines de cualquiera de ellas, son pre-geodésicas afines para cualquie-ra de las otras. Y si queremos pasar de una a otra, basta con reparametrizar las curvas de maneraadecuada para obtener exactamente las mismas ecuaciones.
Pero describir las mismas trayectorias no es suficiente si la interacción gravedad-materia es di-ferente. Dedicimos entonces estudiar si las conexiones de Palatini poseen la misma curvatura, y en-contramos que coinciden para aquellas diferenciadas por un término “pure gauge”. De este modo,podemos agrupar las conexiones de Palatini en diferentes familias, cada una con una curvatura. Sinembargo, resulta sorprendente que la parte de la curvatura que interviene en la desviación geodésicay en las ecuaciones de Einstein es la misma en todos los casos. A esto nos referimos cuando decimosque describen la misma física; lo decimos en un sentido “rudo” pues, sin embargo, no descartamosque en otras situaciones más sutiles se manifiesten efectos físicos. Asímismo, hemos comprobado quelas conexiones de Palatini son las únicas conexiones cuyo transporte paralelo es homotético al deLevi-Civita, por lo que son aquellas que, respecto a esta última, no alteran la dirección de los camposal transportarlos.
Dado que Levi-Civita es una solución y las diferencias entre los efectos físicos de unas y otras noparecen ser observables, concluimos que los formalismos métrico y de Palatini son equivalentes eneste sentido. Pero es importante recalcar que las soluciones de Palatini son matemáticamente diferen-tes. De modo que, la elección de Levi-Civita no está, a efectos de lo que hemos visto, justificada porla física, sino por mera sencillez matemática.
Hemos visto también que aplicar el formalismo de primer orden desde el tangente con los Vielbeinnos reproduce exactamente las mismas ecuaciones de movimiento, siempre que los campos satisfagansus correspondientes ecuaciones de movimiento.
Finalmente, decidimos resolver mediante el formalimo de primer orden la gravedad acoplada alcampo de Dirac, con objeto de observar la repercusión del espín en la dinámica. Y comprobamosefectivamente, cómo este aparece como una fuente de torsión en el espaciotiempo. La conexión so-lución tiene un aspecto que recuerda a las obtenidas en el caso Einstein-Hilbert pero con un términoadicional proporcional al tensor de espín. Además presenta algunas de propiedades en común conaquellas que nos permiten reescribir las ecuaciones de Einstein en forma simétrica. No se ha entradoen detalle en la discusión de los posibles efectos físicos derivados del espín, cuestiones que se dejaránpara futura investigación. Sin embargo, hemos visto brevemente que, a pesar del espín, existen ciertaspautas que se repiten respecto al caso Einstein-Hilbert: la coincidencia de trayectorias autoparalelascon las críticas y la relación homotética entre los transportes paralelos de las diferentes soluciones(entre las que ahora no está la de Levi-Civita)
Tras este interesante estudio podríamos preguntarnos qué hacer ahora. Una idea sería terminar dedesarrollar el caso espinorial y, después, volver a empezar modificando el lagrangiano de gravedad.Podría empezarse por estudiar las teorías Lovelock que sabemos que son las únicas en las que hayequivalencia entre los formalismos métrico y de Palatini. Concretamente por analizar la teoría de
46

Capítulo 7. Conclusiones 47
Gauss-Bonet, que agrega al lagrangiano de Einstein-Hilbert el término de Gauss-Bonet√|g|LGB =
√|g|(R2 − 4RµνR
µν +RµνρλRµνρλ
), (7.0.2)
resolver la ecuación de la conexión y comprobar si obtenemos una solución parecida a (7.0.1) o, qui-zás, la misma. También podría irse más lejos y estudiar gravedad generalizada más alla de Lovelock,como las f(R), o analizar el comportamiento de las soluciones de la ecuación de la conexión bajotransformaciones conformes. En definitiva, como es un tema que repercute en cuestiones básicas, po-see unos horizontes bastante amplios.
Opinión y agradecimientos
A modo de opinión personal, comentar que lo considero un trabajo interesante, precisamente por-que refleja una sutileza teórica a nivel fundamental que parece no repercutir en la física construidaa partir de ella; y, además, lo calificaría de adecuado para el máster Fisymat, pues me ha permi-tido tocar aspectos tratados en diversas asignaturas del máster: geometría diferencial, relatividad,representaciones de grupos, teoría cuántica de campos, conexiones, etc. Finalmente, mencionar quela formulación alternativa mediante Vielbein (§4) y el capítulo del campo de Dirac (§6) han constitui-do trabajo personal, mientras que el desarrollo de los capítulos §3 y §5 han sido llevados a cabo en elmarco de una Beca de Colaboración del Ministerio de Educación, Cultura y Deporte con Bert Janssen,José Alberto Orejuela, Pablo Sánchez, Miguel Sánchez y Antonio N. Bernal. De nuestra investigaciónha resultado el artículo [1]:
A.N. Bernal, B. Janssen, A. Jiménez-Cano, J.A. Orejuela, M. Sánchez, P. Sánchez-Moreno. Onthe (non-)uniqueness of the Levi-Civita solution in the Einstein-Hilbert-Palatini formalism, 2016.http://arxiv.org/abs/1606.08756
actualmente disponible en arXiv y que, próximamente, enviaremos a publicar. Agradecimientos amis compañeros de grupo y especialmente a Bert por su inestimable apoyo y nuestras fructíferasdiscusiones.

Apéndices


A Variaciones útiles
A.1. Variación de la curvatura con una conexión afín general
En general, para una variación del tipo Γρµλ → Γρµλ + δΓρµλ, el tensor de Riemann cambia según:
δR ρµνλ = ∂µδΓ
ρνλ − ∂νδΓ
ρµλ + δΓρµσΓσνλ + ΓρµσδΓ
σνλ − δΓρνσΓσµλ − ΓρνσδΓ
σµλ , (A.1.1)
Ahora utilizamos que δΓρνλ transforma como un tensor (1, 2), de modo que:
∂µδΓρνλ = ∇µδΓρνλ − ΓρµσδΓ
σνλ + ΓσµνδΓ
ρσλ + ΓσµλδΓ
ρνσ (A.1.2)
luego
δR ρµνλ = ∇µδΓρνλ − ΓρµσδΓ
σνλ + ΓσµνδΓ
ρσλ + ΓσµλδΓ
ρνσ ,
−∇νδΓρµλ + ΓρνσδΓσµλ − ΓσνµδΓ
ρσλ − ΓσνλδΓ
ρµσ
+δΓρµσΓσνλ + ΓρµσδΓσνλ − δΓρνσΓσµλ − ΓρνσδΓ
σµλ (A.1.3)
Se cancelan la mayoría, quedando:
δR ρµνλ = ∇µδΓρνλ −∇νδΓ
ρµλ + TσµνδΓ
ρσλ (A.1.4)
donde hemos introducido la torsión Tσµν = Γσµν − Γσνµ. Contrayendo se obtienen:
δRµλ = ∇µδΓννλ −∇νδΓνµλ + TσµνδΓνσλ , (A.1.5)
δR(2)µλ = gανg
λβ(∇µδΓανβ −∇νδΓαµβ + TσµνδΓ
ασβ
), (A.1.6)
δR(3)µν = ∇µδΓλνλ −∇νδΓλµλ + TσµνδΓ
λσλ , (A.1.7)
la primera de las cuales se la conoce como identidad de Palatini.
A.2. Variación δSRicci bajo la conexión de Levi-Civita
Queremos probar que:
δSRicci :=1
2κ
ˆdDx
√|g|gµνδRµν = 0 . (A.2.1)
Para ello recurrimos a la identidad de Palatini (A.1.5) que nos conduce a
2κδSRicci =
ˆdDx
√|g|gµν
[∇µ(δΓλλν
)− ∇λ
(δΓλµν
)]. (A.2.2)
50

Apéndice A. Variaciones útiles 51
La idea ahora es integrar por partes (omitimos el dDx):
2κδSRicci =
ˆ √|g|gµν
[∂µ
(δΓλλν
)− Γσµν
(δΓλλσ
)]−ˆ √
|g|gµν[∂λ
(δΓλµν
)+ Γλλσ
(δΓσµν
)− Γσλµ
(δΓλσν
)− Γσλν
(δΓλµσ
)],
(por partes) = −ˆ (
δΓλλν
)∂µ
(√|g|gµν
)−ˆ √
|g|gµν Γσµν
(δΓλλσ
)+
ˆ (δΓλµν
)∂λ
(√|g|gµν
)−ˆ √
|g|[gµν Γλλσ
(δΓσµν
)− gµν Γσλµ
(δΓλσν
)− gµν Γσλν
(δΓλµσ
)]= −
ˆ [∂µ
(√|g|gµν
)+√|g|gµσΓνµσ
] (δΓλλν
)+
ˆ [∂λ
(√|g|gµν
)−√|g|gµν Γσσλ +
√|g|gσν Γµλσ +
√|g|gµσΓνλσ
] (δΓλµν
)= −
ˆ [gµν∂µ
√|g|+
√|g|∂µgµν +
√|g|gµσΓνµσ
] (δΓλλν
)+
ˆ [gµν∂λ
√|g|+
√|g|∂λgµν −
√|g|gµν Γσσλ +
√|g|gσν Γµλσ +
√|g|gµσΓνλσ
] (δΓλµν
).(A.2.3)
Usamos ahora que en Levi-Civita ∂ρ√|g| =
√|g|Γττρ y sacamos fuera las raíces del determinante de
la métrica:
2κδSRicci =
ˆ √|g|{−[Γµµσg
σν + ∂µgµν + gµσΓνµσ
] (δΓλλν
)+[
XXXXgµν Γσλσ + ∂λgµν −XXXXgµν Γσσλ + gσν Γµλσ + gµσΓνλσ
] (δΓλµν
)}=
ˆ √|g|{−∇µgµν
(δΓλλν
)+ ∇λgµν
(δΓλµν
)}= 0 . (A.2.4)
A.3. Variaciones del tensor de curvatura de espín bajo unavariación de la conexión de espín
Bajo una variación del tipo ω bµa → ω b
µa + δω bµa , la curvatura cambia según:
δR bµνa = ∂µδω
bνa − ∂νδω b
µa − δω cµa ω
bνc − ω c
µa δωb
νc + δω cνa ω
bµc + ω c
νa δωb
µc , (A.3.1)
Otras formas de escribir esto mismo son:
o Utilizando que δω bµa transforma como un tensor (1, 1) bajo TLL,
∂µδωb
νa = Dµδωb
νa + ω cµa δω
bνc − ω b
µc δωc
νa , (A.3.2)
obtenemos:δR b
µνa = Dµδωb
νa −Dνδωb
µa . (A.3.3)
o Otra posibilidad dado que tiene índices de los dos tipos es usar la derivada completamentecovariante:
δR bµνa = Dµδω
bνa −Dνδω
bµa + Tσµνδω
bσa . (A.3.4)

52 A.4. Variación del Vielbein y la conexión de espín bajo TLL
A.4. Variación del Vielbein y la conexión de espín bajo TLL
Consideremos una transformación de Lorentz infinitesimal en representación vectorial
Λab =(e−
i2 θcdM
cdvect
)ab'(1− i
2θcdM
cdvect
)ab
= δab −i
2θcd(M cd
vect
)ab
(A.4.1)
Recuérdese que los parámetros θcd son antisimétricos en sus dos índices. El Vielbein transformacomo un vector y la conexión de espín como un tensor salvo un término. En esta representación:
Λab ' δab −i
2θcd[iηcaδdb − iηdaδcb
]= δab +
1
2[θcbη
ca − θbcηca] = δab + θab (A.4.2)
y, análogamente, (Λ−1
)ab' δab − θab . (A.4.3)
De modo que, bajo una transformación de Lorentz infinitesimal el Vielbein transforma, usando (4.1.5),
δTLLeµa = −θbae
µb , δTLLe
aµ = θabe
bµ . (A.4.4)
Y la conexión de espín, usando (4.1.7),
δTLLωb
µa = θbdωd
µa − θcaω bµc − ∂µθba . (A.4.5)
A.5. Variación de la acción de los campos de materia bajo TLL
Dada una acción del tipo S = SEH + Smatt, ambas partes deben ser escalares bajo TLL. Luego siefectuamos una TLL infinitesimal con parámetros θab sobre el lagrangiano de materia (que conside-ramos mínimamente acoplado a la gravedad1), este debe permanecer invariante:
0 = δTLLSmatt =
ˆdDx
{δSmatt
δχδTLLχ+
δSmatt
δω bµa
δTLLωb
µa +δSmatt
δeµdδTLLe
µd
}. (A.5.1)
El primer término del integrando de (A.5.1) da lugar a las ecuaciones de movimiento de los camposde materia χ y un término de superficie que no consideramos. Tomando los campos on-shell llegamosa:
0 = δTLLSmatt =
ˆdDx
{δSmatt
δω bµa
δTLLωb
µa +δSmatt
δeµdδTLLe
µd
}. (A.5.2)
Llegado a este punto, bifurcamos nuestro estudio:
o Lmatt no depende de la conexión de espín
Entonces usando (A.4.4)
0 =δSmatt
δeµd
(−θbde
µb
)= −|e|
2ηadtmatt
µa θbdeµb , (A.5.3)
donde hemos introducido el tensor energía-momento respecto al Vielbein, tmattµa definido en
(4.3.9) (cuya parte simétrica cumple tmatt(µν) = τmatt
µν ). Esto implica:
0 = θbatmattba
θ(ba)=0−−−−−→ 0 = tmatt[ba] . (A.5.4)
Concluimos pues que mientras los campos estén on-shell, el tensor eaµebνtmattab es simétrico. Y
por tanto, es idéntico al tensor energía-momento de Hilbert τmattµν .
1Admitimos que Lmatt no depende de derivadas de la conexión de espín, por lo que δSmatt
δω bµa
=√|g| ∂Lmatt
δω bµa
. Esto se debe
a que la forma razonable de introducirlas sería mediante términos de curvatura, lo cual estropearía el mínimo acoplo.

Apéndice A. Variaciones útiles 53
o Lmatt depende de la conexión de espín
Ahora empleamos (A.4.4) y (A.4.5):
0 =δSmatt
δω bµa
(θbdω
dµa − θcaω b
µc − ∂µθba)− |e|
2ηadtmatt
µa θbdeµb , (A.5.5)
θbatmatt[ba] =
2
|e|δSmatt
δω bµa
(θbdωµad − θcaω cb
µ − ∂µθba), (A.5.6)
Jugando con los índices de la conexión de espín
θbatmatt[ba] =
2
|e|δSmatt
δωµab
(θbcω
cµa − θcaω c
µ b − ∂µθba). (A.5.7)
Luego, se anula la parte antisimétrica del tensor si y solo si δSmatt
δωµab≡√|g|∂Lmatt
δω bµa
= 0.

B Más sobre la curvatura y la torsión deespín
B.1. Tensor de curvatura de espín y contracciones
Partimos del tensor de curvatura de espín, definido mediante la segunda ecuación de estructura deCartan
R bµνa := ∂µω
bνa − ∂νω b
µa − ω cµa ω
bνc + ω c
νa ωb
µc , (B.1.1)
que, por definición, es antisimétrico en sus dos primeros índices. Podemos construir además, en prin-cipio, cuatro tensores de espín de dos índices (independientes):
Rµa ≡ R(1)µa = eνbR b
µνa , R(2) aµ = eνcη
dcR aµνd , (B.1.2)
R(3)µν = R a
µνa , R(4) ba = gµνR b
µνa ≡ 0 . (B.1.3)
dada la nulidad del cuarto, tan solo tenemos tres contracciones independientes. Obsérvese que eltercero es antisimétrico en sus dos índices.
Dado queR(3)µν yR(4) b
a son de traza cero, tan solo tenemos dos escalares de curvatura de espín.Se comprueba fácilmente que estos resultan ser iguales salvo un signo:
R = ηabeµbRµa , (B.1.4)
R(2) = eµaR(2) aµ ≡ −R . (B.1.5)
B.2. Tensores y escalares de curvatura de espín bajo lospostulados del Vielbein
B.2.1. Los postulados del Vielbein y la antisimetría de la conexión de espín
El postulado del Vielbein (PV)
El primer postulado (a veces llamado “primer postulado del Vielbein”), como vimos en el capítulo§4, es el que nos relaciona la descripción de la conexión afín con la de espín:
ω bµa = Γρµνe
νaebρ − eνa∂µebν , Γλµν = eaνe
λbω
bµa + eλb∂µe
bν . (B.2.1)
Pudiéndose así relacionar el tensor de Riemann de la variedad con el tensor de curvatura de espín:
R bµνa = eρae
bλR
λµνρ , (B.2.2)
y así todos los tensores anteriores quedan relacionados con las contracciones del Riemann.
El postulado de metricidad (PM)
Tambien llamado “segundo postulado del Vielbein”, consiste simplemente en imponer la condiciónde metricidad sobre la conexión afín:
∇µgνλ = 0 . (B.2.3)
Por sí solo no nos dice nada acerca de la conexión de espín sino de la afín. Pero, junto con el primerpostulado que relaciona ambas conexiones, nos proporcionará la antisimetría de la conexión de espínen sus índices latinos como veremos a continuación.
54

Apéndice B. Más sobre la curvatura y la torsión de espín 55
El postulado de antisimetría (PA)
Aparte de los postulados del Vielbein, existe una tercera propiedad relacionada con la conexión deespín que suele postularse. Se trata de la antisimetría de sus índices latinos, lo cual es equivalente ala nulidad de la derivada completamente covariante de la métrica plana (lo cual es razonable de serpostulado):
Dµηab = Dµηab = 0− ω cµa ηcb − ω c
µb ηac = −ωµab − ωµba = 0 ⇔ ωµ(ab) = 0 . (B.2.4)
Este postulado tiene consecuencias interesantes, principalmente, que esta antisimetría se traslada altensor de curvatura de espín:
R bµνa = −R b
µν a . (B.2.5)
Una vez vistos estos tres postulados, vamos a fijarnos en la siguiente expresión, fácilmente de-mostrable, para la derivada covariante de la métrica:
∇µgνλ = 2δ(ρν δ
σ)λ ηabe
aσDµe
bρ + eaνe
bλDµηab . (B.2.6)
Vemos que el primer miembro es nulo bajo el segundo postulado (PM), el primer término delsegundo bajo el primero (PV) y el último lo es si la conexión de espín es antisimétrica (PA).
De hecho, bajo el primer postulado, como ya sabemos, los Vielbein entran y salen de la derivadacompletamente covariante, ∇µgνλ = eaνe
bλDµηab; y esto nos conduce a que el segundo postulado se
verifica si y solo si la conexión de espín es antisimétrica:
∇µgνλ = 0(PV)⇔ ωµab = −ωµba . (B.2.7)
de modo que cuando nos refiramos a “imponer los dos postulados” nos estaremos refiriendo, indis-tintamente, a (PV)-(PM) o a (PV)-(PA).
Al llevarnos las propiedades (B.2.5) al tensor de Riemann mediante (PV) vemos que también debeser antisimétrico en los dos últimos índices, pero eso es consistente pues el segundo postulado loque ha impuesto es la compatibilidad con la métrica que era la responsable de dicha propiedad desimetría [demostración en (2.3.3)].
B.2.2. Consecuencias de los postulados sobre la curvatura de espín
Tensores de curvatura de dos índices bajo los postulados
Imponiendo el (PV) sobre las contracciones de la curvatura de espín llegamos a las igualdades1:
Rµa = Rµa (= eρaRµρ) , (B.2.8)
R(2)µa = R(2)
µa
(= ηabe
bλR
(2) λµ
), (B.2.9)
R(3)µν = R(3)
µν , (B.2.10)
R(4) ba = 0
(= R(4) b
a
). (B.2.11)
De aquí resultan los siguientes tensores de curvatura de espín de dos índices no triviales: Rµa,R(2)
µa y R(3)µν , que están identificados con las correspondientes contracciones del tensor de Rie-
mann, y son independientes entre sí, dado que Rµρ, R(2)µρ y R(3)
µν lo son. Además, la igualdad(B.2.8), nos lleva de forma inmediata a
R = R . (B.2.12)1He aquí la importancia de la notación R ↔ R. Por ejemplo, los tensores Rµν y Rµν := eaνRµa son diferentes mientras
no se imponga el (PV).

56 B.3. Torsión de espín
Manteniendo el (PV), ahora vamos a imponer (PM), i.e. la compatibilidad de la conexión afín dela variedad con la métrica, de la cual se obtienen Rµν = −R(2)
µν y R(3)µν = 0 [ecs. (2.6.3)] que nos
conducen, respectivamente, a las mismas propiedades trasladadas a los tensores de espín:
Rµa = −R(2)µa , R(3)
µν = 0 . (B.2.13)
Y solo nos quedamos con un tensor de curvatura de espín independiente y no trivial:Rµa.
B.3. Torsión de espín
Como comprobamos efectuando el conmutador de derivadas covariantes asociadas a la conexiónde espín [ec. (4.1.8)], no aparece el término de torsión. Sin embargo, sí que se define en el formalismodel Vielbein una torsión; veamos la motivación. Mediante la primera ecuación de estructura de Cartan sedefine la torsión de espín como:
T aµν := ∂µeaν − ∂νeaµ + ω a
µb ebν − ω aνb ebµ , (B.3.1)
de modo que:Dµe
aν −Dνe
aµ = T aµν − Tσµνeaσ . (B.3.2)
Bajo el postulado del Vielbein, el primer miembro se anula y, al igual que las curvaturas se vuelvenequivalentes, lo mismo ocurre con las torsiones; el Vielbein liga la torsión de Riemann con la de espín:
T aµν = Tσµνeaσ . (B.3.3)
La definición de T aµν , por tanto, se efectúa de manera que, vía primer postulado, coincida con latorsión T aµν .

57

Bibliografía
[1] A.N. Bernal, B. Janssen, A. Jiménez-Cano, J.A. Orejuela, M. Sánchez, P. Sánchez-Moreno, On the (non-)uniqueness of the Levi-Civita solution in the Einstein-Hilbert-Palatini formalism, 2016, http://arxiv.org/abs/1606.08756.
[2] B. Janssen, Teoría de la Relatividad General, 2015.
[3] B. Janssen, M. Bastero-Gil, M. Borunda, Palatini versus metric formulation in higher-curvature gravity, Journalof Cosmology and Astroparticle Physics 2008 (2008), no. 11, 008, http://arxiv.org/abs/0804.4440.
[4] D. Tong, String theory, arXiv preprint arXiv:0908.0333 (2009), http://arxiv.org/abs/0908.0333.
[5] D.G.C. McKeon, The canonical structure of the first-order Einstein-Hilbert action, Internat. J. Modern Phys. A 25(2010), no. 17, 3453–3480, http://dx.doi.org/10.1142/S0217751X10050093. MR 2669597
[6] DM Sjøstrøm, Bosons and Fermions in Curved Spacetime, (2013).
[7] G. Allemandi, A. Borowiec, M. Francaviglia and S.D. Odintsov, Dark energy dominance and cosmic accelera-tion in first-order formalism, Physical Review D 72 (2005), no. 6, 063505, https://arxiv.org/abs/gr-qc/0504057.
[8] G.W. Gibbons, Supergravity (Lecture notes), 2009, Typeset by Ziyang Hu.
[9] H. Arthur Weldon, Fermions without vierbeins in curved space-time, Phys. Rev. D (3) 63 (2001), no. 10, 104010,11, http://dx.doi.org/10.1103/PhysRevD.63.104010. MR 1840682
[10] H.F.M. Goenner, Palatini’s cousin: A New Variational Principle, arXiv preprint arXiv:1003.5532 (2010), http://arxiv.org/abs/1003.5532v1.
[11] I. Sánchez Rodríguez, Conexiones en el fibrado de referencias de segundo orden. Conexiones conformes, Ph.D. thesis,Universidad Complutense de Madrid, Junio 1994.
[12] J. Seoane, Espinores de Killing y operador de Dirac en variedades de Riemann: la variedad de Berger B7, Master’sthesis, Universidad de Santiago de Compostela, 2010.
[13] J. Yepez, Einstein’s vierbein field theory of curved space, 2008, http://arxiv.org/abs/1106.2037v1.
[14] J.A. Pastor, Geometría de Riemann (Curso), 2006-2007, http://www.um.es/docencia/jpastor/miweb_files/ficheros/griemann/manual.pdf.
[15] M. Blau, Lecture notes on general relativity, Albert Einstein Center for Fundamental Physics Bern Germany,2011.
[16] M. Sánchez, M.A.Javaloyes, An introduction to Lorentzian Geometry and its applications, 2015-2016.
[17] N.D. Birrell, P.C.W. Davies, Quantum fields in curved space, no. 7, Cambridge University Press, 1984.
[18] N.J. Poplawski, Spacetime and fields, http://arxiv.org/abs/0911.0334v1.
[19] Q. Exirifard, M.M. Sheikh-Jabbari, Lovelock gravity at the crossroads of Palatini and metric formulations, PhysicsLetters B 661 (2008), no. 2, 158–161, https://arxiv.org/abs/0705.1879.
[20] R. Aldrovandi, P.B. Barros, J.G. Pereira, Spin and anholonomy in general relativity, arXiv preprint gr-qc/0402022 (2004), http://arxiv.org/abs/gr-qc/0402022.
[21] R. d’Inverno, Introducing Einstein’s relativity, Oxford University Press, USA, 1998.
[22] R.M. Wald, General relativity, University of Chicago Press, 2010.
[23] R.W. Tucker, C. Wang, Black holes with Weyl charge and non-Riemannian waves, Classical and Quantum Gravity12 (1995), no. 10, 2587, http://arxiv.org/abs/gr-qc/9509011v1.
[24] S. Jensen, General Relativity with Torsion: Extending Wald’s Chapter on Curvature, 2005.
[25] S.W. Hawking, G.F.R. Ellis, The large scale structure of space-time, vol. 1, Cambridge University Press, 1973.
[26] T. Ortín, Gravity and strings, Cambridge University Press, 2004.
[27] T. Watanabe, M.J. Hayashi, General relativity with torsion, arXiv preprint gr-qc/0409029 (2004), https://arxiv.org/abs/gr-qc/0409029.
[28] V. De Sabbata, C. Sivaram, Spin and torsion in gravitation, World scientific, 1994.
58