Facultad de Ingeniería y Ciencias...
86
UNIVERSIDAD NACIONAL DEL LITORAL Facultad de Ingeniería y Ciencias Hídricas PROYECTO FINAL DE CARRERA INGENIERÍA EN INFORMÁTICA REGISTRO Y FUSIÓN DE IMÁGENES MÉDICAS MEDIANTE TÉCNICAS AVANZADAS DE PROCESAMIENTO DIGITAL Autor: Mónica G. Larese Director: Bioing. César Martínez Octubre de 2004
Transcript of Facultad de Ingeniería y Ciencias...

UNIVERSIDAD NACIONAL DEL LITORAL
Facultad de Ingeniería y Ciencias Hídricas
PROYECTO FINAL DE CARRERA
INGENIERÍA EN INFORMÁTICA
REGISTRO Y FUSIÓN DE IMÁGENES MÉDICAS MEDIANTE TÉCNICAS AVANZADAS
DE PROCESAMIENTO DIGITAL
Autor: Mónica G. Larese
Director: Bioing. César Martínez
Octubre de 2004

Imagen de carátula: “Fusión de MR y CT”. (Fuente: C. Benito [3])

A mis padres, por su esfuerzo y empuje permanentes que me permitieron llegar hasta aquí
A Milton, por ayudarme con su comprensión y apoyo constantes

III
Í ndice
PREFACIO ......................................................................................................................VII
AGRADECIMIENTOS ................................................................................................. VIII
CAPÍTULO 1. INTRODUCCIÓN....................................................................................1
1.1. ANTECEDENTES HISTÓRICOS .......................................................................................3
1.2. OBJETIVOS DEL PROYECTO ..........................................................................................4
1.3. CARACTERÍSTICAS TÉCNICAS DEL PROYECTO .............................................................5
CAPÍTULO 2. FUNDAMENTOS TEÓRICOS DEL REGISTRO.................................7
2.1. DEFINICIONES PRELIMINARES......................................................................................7
2.2. TIPOS DE TRANSFORMACIÓN GEOMÉTRICA..................................................................8
2.3. CLASIFICACIÓN DE LAS TÉCNICAS DE REGISTRO........................................................10
2.3.1. SEGÚN LA DIMENSIONALIDAD DE LA TRANSFORMACIÓN ............................................10
2.3.2. SEGÚN EL TIPO DE TRANSFORMACIÓN GEOMÉTRICA ...................................................11
2.3.3. SEGÚN LOS SUJETOS IMPLICADOS ..............................................................................11
2.3.4. SEGÚN LAS MODALIDADES IMPLICADAS ....................................................................11
2.3.5. SEGÚN EL NIVEL DE AUTOMATIZACIÓN ......................................................................11
2.3.6. SEGÚN LAS CARACTERÍSTICAS SOBRE LAS CUALES OPERAN........................................12
2.3.6.1. Técnicas basadas en correspondencia de marcadores.............................................12
2.3.6.2. Técnicas basadas en ajuste de superficies. .............................................................13
2.3.6.2.1. Algoritmo head-hat............................................................................................13
2.3.6.2.2. Algoritmo de transformaciones en distancia .......................................................13
2.3.6.2.3. Algoritmo del punto iterativo más cercano .........................................................14
2.3.6.3. Técnicas basadas en medidas de similaridad entre vóxeles. ...................................14
2.3.6.3.1. Algoritmo de minimización de la diferencia de intensidades ..............................14
2.3.6.3.2. Correlación cruzada ...........................................................................................15

IV
2.3.6.3.3. Tasa de uniformidad de imagen (RIU) ...............................................................15
2.3.6.3.4. Uniformidad de intensidad particionada (PIU) ...................................................15
2.3.6.3.5. Algoritmo de información mutua (MI) ...............................................................15
2.4. PREPROCESAMIENTO DE IMÁGENES ...........................................................................19
2.4.1. SUAVIZADO DE LAS IMÁGENES ..................................................................................19
2.4.2. REESCALADO EN INTENSIDAD ...................................................................................20
2.4.3. EFECTO DEL SUAVIZADO Y EL REESCALADO SOBRE LA FUNCIÓN DE INFORMACIÓN
MUTUA ......................................................................................................................21
2.5. FUSIÓN DE IMÁGENES.................................................................................................22
2.5.1. CORTINILLAS DESPLAZABLES ....................................................................................22
2.5.2. CURSORES LINKEADOS..............................................................................................23
2.5.3. SUPERPOSICIÓN DE COLOR ........................................................................................23
2.5.4. SUSTRACCIÓN DE IMÁGENES .....................................................................................23
2.5.5. CAMPOS DE DEFORMACIÓN .......................................................................................23
2.5.6. MANEJO DE TRANSPARENCIA (ALPHA BLENDING) ......................................................23
CAPÍTULO 3. ALGORITMOS GENÉTICOS..............................................................25
3.1. FUNDAMENTOS BÁSICOS ............................................................................................25
3.2. EVOLUCIÓN DE UN AG...............................................................................................26
3.2.1. PROCESO DE REPRODUCCIÓN.....................................................................................26
3.2.2. ALTERACIONES GENÉTICAS.......................................................................................28
3.2.3. PROCESO DE SELECCIÓN DE INDIVIDUOS ....................................................................29
3.3. FUNCIONAMIENTO DE UN AG.....................................................................................29
CAPÍTULO 4. DESARROLLO DEL PROYECTO......................................................31
4.1. REQUISITOS PRELIMINARES .......................................................................................31
4.2. SELECCIÓN DE ALTERNATIVAS TÉCNICAS ..................................................................32
4.2.1. TÉCNICA DE REGISTRO ..............................................................................................32
4.2.2. TIPO DE TRANSFORMACIÓN .......................................................................................32
4.2.3. ALGORITMO DE OPTIMIZACIÓN..................................................................................33
4.2.4. ENTORNO DE PROGRAMACIÓN...................................................................................33
4.3. ESTRUCTURA FUNCIONAL DE LA APLICACIÓN ............................................................34

V
4.3.1. PREPROCESAMIENTO DE LAS IMÁGENES ORIGINALES..................................................34
4.3.1.1. Suavizado de las imágenes....................................................................................35
4.3.1.2. Reescalado (rebinning) de las imágenes ................................................................35
4.3.2. PROCESO ITERATIVO DE OPTIMIZACIÓN DE PARÁMETROS ...........................................36
4.3.3. POSTPROCESAMIENTO DE LAS IMÁGENES REGISTRADAS .............................................37
4.4. DESCRIPCIÓN DE LA INTERFAZ Y OPERACIÓN DEL SISTEMA.......................................38
4.4.1. VENTANA PRINCIPAL ................................................................................................38
4.4.2. CONFIGURACIÓN DE PARÁMETROS ............................................................................39
4.4.3. PROCESO DE REGISTRO .............................................................................................42
4.4.4. FUSIÓN DE IMÁGENES ...............................................................................................42
4.5. RESULTADOS..............................................................................................................44
4.5.1. SIMULACIONES POR COMPUTADORA ..........................................................................44
4.5.1.1. Caso 1: Dos imágenes de CT ................................................................................44
4.5.1.2. Caso 2: Dos imágenes de MR ...............................................................................47
4.5.1.3. Análisis de resultados ...........................................................................................50
4.5.1.4. Caso 3: Imagen de MR con imagen de CT ............................................................50
4.5.2. CASOS REALES .........................................................................................................53
4.5.2.1. Registro y fusión de la primera imagen (CT) con la segunda (MR). ......................55
4.5.2.2. Registro y fusión de la primera imagen (CT) con la tercera (MR)..........................56
4.5.2.3. Registro y fusión de la primera imagen (CT) con la cuarta (MR)...........................57
4.5.2.4. Registro y fusión de la segunda imagen (MR) con la tercera (MR)........................60
4.5.2.5. Registro y fusión de la segunda imagen (MR) con la cuarta (MR).........................61
4.5.2.6. Registro y fusión de la tercera imagen (MR) con la cuarta (MR). ..........................64
CAPÍTULO 5. EVALUACIÓN ECONÓMICO-FINANCIERA ..................................66
5.1. COSTOS DE DESARROLLO POR UN INGENIERO NOVEL ................................................66
5.1.1. RECURSOS HUMANOS................................................................................................66
5.1.2. GASTOS VARIOS........................................................................................................67
5.1.3. BIENES DE CAPITAL ..................................................................................................68
5.1.3.1. Costos de equipamiento ........................................................................................69
5.1.3.2. Costos de licencias de software.............................................................................69
5.2. COSTOS DE DESARROLLO POR UN ESTUDIANTE UNIVERSITARIO ................................71
VI
CAPÍTULO 6. CONCLUSIONES..................................................................................74
REFERENCIAS.................................................................................................................76

VII
P r ef acio
El registro de imágenes permite la alineación de dos o más imágenes provenientes de la misma o de diferentes modalidades. Las coordenadas de los vóxeles o píxeles que se corresponden en las diferentes imágenes se transforman geométricamente para alinear e igualar sus posiciones y coordenadas espaciales. Una vez determinada la transformación adecuada, se procede a su visualización conjunta mediante el proceso conocido como fusión de imágenes. Éste es un problema fundamental en muchos ámbitos científicos, incluyendo el de procesamiento de imágenes médicas.
La utilización de imágenes médicas es de fundamental importancia en el diagnóstico de patologías anatómicas o funcionales, así como también en intervenciones quirúrgicas asistidas por imágenes. Mediante el registro de la información obtenida a partir de distintos estudios se pueden correlacionar y complementar hallazgos entre ellos.
En este proyecto se realizó la implementación de una técnica automática de registro basada en técnicas de información mutua. Se desarrolló un software con una interfaz gráfica de usuario que permite al mismo seleccionar las imágenes que desea registrar y configurar parámetros relacionados con el proceso de registro, así como también las propiedades del algoritmo genético que se implementa para la optimización. La fusión de imágenes se realiza usando pseudocolor con distintos grados de transparencia, y animaciones que permiten observar la transición de una imagen a otra. Las opciones de zoom disponibles en la interfaz permiten realizar acercamientos de las zonas de interés para observar con mayor claridad el resultado del registro.
El presente informe se encuentra organizado según se detalla a continuación.
En el Capítulo 1 se introduce al lector en la temática del proceso de registro y fusión de imágenes médicas, destacando su importancia y los antecedentes históricos que han influido en su desarrollo actual. Se realiza además la descripción de los objetivos del presente proyecto y una introducción a los aspectos técnicos de su implementación.
El Capítulo 2 describe los fundamentos teóricos del proceso y una perspectiva formal sobre las técnicas de registro y fusión existentes.
En el Capítulo 3 se realiza una introducción teórica a los algoritmos genéticos, su importancia y lógica de funcionamiento.
Los detalles técnicos de implementación del proyecto se abordan en el Capítulo 4. Se explican las herramientas utilizadas y los resultados obtenidos, presentando además un resumen de las estadísticas correspondientes. Se describe además la interfaz de la aplicación desarrollada así como también las opciones que le permiten al usuario su configuración y ejecución.
En el Capítulo 5 se evalúan los aspectos económico–financieros del proyecto.
Finalmente, en el Capítulo 6 se presentan las conclusiones y se discuten posibles líneas de investigación que puedan mejorar y ampliar el trabajo hasta aquí realizado.

VIII
Agr adecimient os
Quisiera agradecer a todas aquellas personas que de una u otra manera colaboraron en la realización de este proyecto.
En primer lugar a mi director, César Martínez, ya que sin su guía y paciente dedicación hubiera sido imposible llevarlo a cabo.
También agradezco a Diego Milone y Leandro Di Persia, por colaborar con las opiniones y sugerencias que me brindaron.
A Gustavo Bizai, Adrián Salvatelli y Milner Flecha, investigadores y docentes de la Facultad de Ingeniería de la Universidad Nacional de Entre Ríos y miembros del Grupo de investigación y desarrollo en Imágenes en Medicina (IMABIO), por su ayuda en la definición de la línea de implementación del proyecto.
Mi gratitud también para Mario Storti, por su ayuda fundamental en la optimización de los tiempos de ejecución de los algoritmos.

1
Capít u lo 1 . I nt r oducción
l proceso conocido como registro permite establecer la correspondencia espacial entre dos o más imágenes bajo un mismo sistema de coordenadas, de tal manera
de poder relacionar estructuras equivalentes visibles en cada una de ellas.
El campo de aplicación de esta técnica es muy diverso, y continúa ampliándose a medida que se desarrollan las investigaciones y vislumbran nuevas potencialidades. En el presente el registro de imágenes se aplica a la detección remota, en sistemas de información geográfica (SIG), en el procesamiento y análisis de imágenes satelitales, y actualización de mapas cartográficos. Se utiliza también en robótica y visión computacional para la detección de cambios y control de calidad industrial. En medicina su utilidad radica en la posibilidad de facilitar el diagnóstico y la cirugía asistida por imágenes.
Es una disciplina perteneciente al procesamiento y análisis digital de imágenes que se encuentra en la actualidad en constante desarrollo e investigación. Los primeros trabajos en el campo de la medicina relacionados con el tema comenzaron a publicarse en la década de los años ’90 [9].
Surgió como consecuencia del desarrollo de una gran diversidad de modalidades de imágenes diagnósticas, cada una de las cuales provee al especialista con información específica y complementaria.
En la Figura 1.1 se pueden ver algunas modalidades de imágenes médicas muy utilizadas actualmente. Algunas de estas modalidades brindan información anatómica y en consecuencia tienen una mayor resolución espacial. Otras representan visualmente procesos fisiológicos o metabólicos del paciente, pero disponen de una resolución menor. La combinación de ambas modalidades ayuda al especialista en la localización espacial de las estructuras de interés, tanto para la realización de diagnósticos como de intervenciones quirúrgicas.
Las imágenes de Resonancia Magnética (MR) se generan a partir de la exposición del paciente a un imán de gran poder que polariza por un breve lapso de tiempo sus células. La respuesta de los tejidos se detecta mediante sensores adecuados y da lugar a estas imágenes de tipo anatómico. En la Tomografía Computada de rayos X (CT), el paciente es expuesto a una fuente de rayos X que lo atraviesa y la atenuación de los mismos se representa como una imagen 3D. Es una modalidad de tipo anatómica y sensible a la densidad de los tejidos. Las imágenes de ultrasonido se construyen mediante la transmisión de pulsos de sonido de alta frecuencia no detectables por el oído humano, que penetran en el interior del cuerpo y chocan contra los contornos de los tejidos produciendo el fenómeno de reflexión. El tiempo de retorno y la velocidad de penetración permiten discriminar los tejidos en sus distintos tipos. La Tomografía por Emisión de Positrones (PET) y la Tomografía por Emisión de Fotón Único (SPECT) son imágenes funcionales de baja resolución. En medicina nuclear se utilizan sustancias radioactivas que se inyectan al paciente y que permiten observar el tejido funcional [1].
E

2
Las resoluciones espaciales de los distintos tipos de modalidades varían desde 5 mm. para medicina nuclear, 1.0 ó 0.5 mm. para MR y CT, hasta 20-100 µm. para los sistemas ópticos [2].
Estas modalidades generan sucesivos cortes (imágenes 2D) de una parte del cuerpo del paciente, y el conjunto de cortes da lugar a una imagen 3D formada por una matriz de elementos de volumen (denominados vóxeles) [9]. En el caso de imágenes obtenidas mediante rayos X, las mismas son imágenes 2D constituidas por píxeles.
(a) (b)
(c) (d)
Figura 1.1: Ejemplos de modalidades de imágenes médicas. (a) CT de cerebro. (b) PET de tórax. (c) MR de cerebro. (d) Radiografía de tórax.
La importancia del proceso de registro radica en la mayor precisión y fiabilidad con que provee al especialista médico en su actividad. La adquisición de imágenes de muy diversas características hace que las mismas deban ser combinadas o “fusionadas” mentalmente para obtener conclusiones clínicas útiles. Esto requiere que el médico realice una compensación mental para detectar cambios en la posición del sujeto o de sus estructuras.
Mediante la utilización de la técnica de registro es posible en cambio establecer de manera exacta la correspondencia entre porciones anatómicas y funcionales provenientes de

3
imágenes de iguales o distintas modalidades, del mismo o distintos pacientes, de información proveniente de un atlas médico o incluso del espacio físico en tiempo real [2].
Los atlas son modelos anatómicos de alta resolución que permiten una más fácil interpretación y delineación de las estructuras de interés correspondientes al paciente. Un ejemplo de atlas se muestra en la Figura 1.2.
Todo este proceso constituye una técnica avanzada en el procesamiento y análisis de imágenes que permite la superposición simultánea de la información correspondiente a distintos tipos de ellas, combinándolas en una única imagen que sirva de apoyo al especialista médico. Este procedimiento es conocido como Registro y Fusión de Imágenes Médicas (MIRF). Como ejemplo de aplicación se puede mencionar que en la práctica quirúrgica, el MIRF permite determinar más fehacientemente las porciones anatómicas que van a ser seccionadas, y al mismo tiempo identificar otras que se deben preservar intactas con el objeto de minimizar las secuelas postquirúrgicas.
Figura 1.2: Ejemplo de un atlas digital de cerebro. (Fuente: C. Benito [3]).
1 .1 . Ant ecedent es his t ór icos
Los primeros antecedentes acerca del registro de imágenes clínicas se remontan a varias décadas atrás. Inicialmente se aplicó a angiografías de rayos X, las cuales eran registradas mediante técnicas de sustracción fotográfica. Los negativos de las imágenes previa y posterior a la inyección de material contrastante en el paciente se alineaban en forma manual, y luego se obtenía una nueva fotografía a partir de los mismos. A continuación las imágenes registradas eran sustraídas para visualizar los cambios.
También en el siglo XIX ya se usaba el registro para asistir a los médicos en la realización de cirugías. Incluso en los campos de batalla los cirujanos usaban radiografías tomadas a los soldados heridos como guía durante la operación quirúrgica.
Con posterioridad la digitalización de imágenes impulsó el surgimiento de nuevas tecnologías digitales de registro. En neurocirugía se comenzó a utilizar el marco estereotáctico, el cual consiste en un dispositivo rígido que se fija a la cabeza del paciente y
4
que provee de un sistema de coordenadas común para las imágenes adquiridas y para el espacio físico, permitiendo fácilmente establecer la correspondencia espacial entre ellos.
Sin embargo recién en la década de los años ’90 nacieron las técnicas de registro retrospectivo, las cuales no requieren de dispositivos especiales ni referencias externas a la hora de realizar la obtención de las imágenes [2].
Los métodos automáticos de registro comenzaron a desarrollarse a mitad de la década de los años ’90 con la aparición de técnicas basadas en la teoría de la información. Estos métodos utilizan toda la información disponible en las imágenes, y no requieren mayor intervención del usuario que para verificar el resultado final. Los más eficaces corresponden a aquellos que utilizan como función de optimización iterativa a la entropía entre las imágenes y el concepto de información mutua, desarrollado por Shannon en 1948 [12].
En la actualidad las investigaciones acerca de nuevas técnicas reciben grandes inversiones por parte de instituciones educativas y empresas privadas, y se encuentran orientadas principalmente al registro de tipo elástico que permite alinear tanto imágenes correspondientes a tejidos blandos como aquellas obtenidas a partir de distintos sujetos.
1 .2 . Objet ivos del pr oyect o
En la realización de este proyecto se plantearon objetivos generales y específicos a ser alcanzados mediante su desarrollo. Los mismos se describen a continuación:
Objetivos generales:
- Adquirir nuevos conocimientos acerca de aplicaciones específicas innovadoras de técnicas de procesamiento digital de imágenes.
- Aplicar los conocimientos adquiridos en el transcurso de la carrera a un proyecto interdisciplinario que brinde servicios a la comunidad científica, y de allí, a la comunidad en general.
- Colaborar en proyectos de investigación que requieran la participación de profesionales informáticos en el área del procesamiento de imágenes digitales.
Objetivos específicos:
- Diseñar un método de registro automático que no requiera intervención de un experto.
- Implementar la fusión de las imágenes objeto del registro, combinando en una única imagen sintética información anatómica, funcional y/o metabólica de pacientes en estudio.
- Facilitar la interpretación de la información visual mediante la utilización de las imágenes combinadas, evitando imprecisiones debidas a compensaciones mentales.

5
1 .3 . Car act er ís t icas t écnicas del pr oyect o
Al momento de intentar combinar espacialmente las imágenes la realidad muestra que las mismas no concuerdan. Ésta es la razón por la que se utiliza el procedimiento de registro, según el cual en primer lugar se debe calcular la transformación geométrica que provee la alineación. Seguidamente se procede a la aplicación de la misma a las imágenes de interés.
De los métodos de registro candidatos se estudiaron los principios técnicos del procesamiento digital de imágenes, región anatómica de mayor efectividad en los resultados, aspectos prácticos de implementación, etc. Posteriormente se efectuó una selección del método más adecuado para su desarrollo haciendo un balance entre el costo de su implementación y el resultado que dicho método era capaz de proveer. Esta etapa requirió una revisión bibliográfica de material específico, incluyendo publicaciones periódicas de investigación que fueron considerados de relevancia y capaces de ser tomados como referentes por su aporte al estado del arte.
El método que se implementó en este proyecto consiste en una transformación geométrica rígida. El registro utiliza la técnica de información mutua (MI) y se encuentra basado en conceptos e ideas provenientes de la Teoría de la Información. Básicamente, es una medida de cómo una imagen “explica” a la otra, y no realiza suposiciones acerca de la forma funcional o relación entre las intensidades de las dos imágenes.
La implementación del método de MI utiliza relaciones estadísticas entre los valores de intensidad de los vóxeles. El concepto fundamental está basado en la observación de que aunque las imágenes muestren información complementaria (como es el caso, por ejemplo, de imágenes que provienen de modalidades diferentes) usualmente existe también un alto grado de información compartida cuando corresponden a las mismas estructuras. La importancia de este método es su versatilidad para ser aplicado a imágenes de cualquier tipo, sin importar si se trata del mismo paciente o de pacientes diferentes, inter o intramodalidad. Incluso su aplicación se puede extender a otros campos de aplicación sin necesidad de preprocesamientos específicos en cada tarea, ni cambios intrínsecos de la técnica de registro.
Este método ha probado en la bibliografía ser muy robusto y ha resultado en algoritmos de registro de cuerpo rígido 3D-3D completamente automatizados y que en la actualidad se encuentran muy utilizados. Su descripción teórica y matemática se explica en el Capítulo 2.
En el proceso de registro fue requerida la utilización de técnicas de optimización que permitieran hallar la solución correspondiente a la transformación geométrica más adecuada para realizar la alineación. El algoritmo parte de valores iniciales y los va actualizando iterativamente, calculando con ellos la función de costo (correspondiente a la información mutua), determinando si la alineación entre las imágenes es satisfactoria. Los valores de inicialización deben estar dentro del “rango de captura”, es decir lo suficientemente cercanos a la solución óptima para que el algoritmo converja a la solución correcta.
El registro óptimo se logra cuando el valor de la función de información mutua alcanza un máximo. La solución provista no se alcanza de manera cerrada, sino que el algoritmo itera hasta lograr la convergencia con una tolerancia prefijada por el usuario.

6
La técnica de optimización usada en este proyecto corresponde a un algoritmo genético (AG). Los AGs son una técnica computacional que imita el proceso de evolución de las especies en la naturaleza. Trabajan sobre una población de soluciones potenciales, donde cada una de ellas se asocia con un valor de fitness o costo (valor de información mutua) que mide qué tan buena es comparada con las otras soluciones de la población.
Una vez registradas las dos imágenes, es posible visualizar la información provista por ambas en una única imagen mediante el procedimiento de “ fusión”. La técnica de fusión elegida para su implementación en el presente proyecto corresponde a aquella que permite combinar las imágenes fuente mediante la operación de suma de intensidades con manejo de la transparencia (alpha blending).
En la fusión se aplican métodos de realce general de la imagen. Un método que se destaca entre éstos es la coloración por pseudocolor, ya que facilita la visualización y el análisis de la imagen destino.
Como producto final del proyecto se desarrolló un software con una interfaz gráfica de usuario que permite al mismo seleccionar las imágenes que desea registrar y configurar parámetros de registro. Las imágenes fusionadas se pueden visualizar con distintos grados de transparencia o mediante una animación de video. Las opciones de zoom disponibles en la interfaz permiten realizar acercamientos de las zonas de interés para observar con mayor claridad el resultado del registro.
7
Capít u lo 2 . F undament os t eór icos del r egis t r o
n este capítulo se introducen los conceptos y definiciones fundamentales relacionadas con el registro y las transformaciones geométricas. Se describen los
criterios de clasificación más relevantes y se brinda una perspectiva formal sobre los algoritmos existentes con detalles técnicos necesarios para su implementación. Se explican además los métodos requeridos comúnmente por los algoritmos automáticos de registro para preprocesar las imágenes. Se finaliza con una descripción de las técnicas de fusión más ampliamente difundidas.
2 .1 . Def in iciones pr el iminar es
El registro de imágenes se define como el proceso mediante el cual dos imágenes se alinean entre sí, colocándolas en correspondencia espacial de modo de permitir la correlación de sus características.
Sean dos imágenes A y B que representan una región del cuerpo de un paciente bajo estudio. Cada una de ellas está constituida por un conjunto de vóxeles xA y xB que abarca un campo limitado de visualización del paciente. Este campo de visualización (dominio) generalmente no es el mismo en ambas imágenes, dando lugar a dos dominios ΩA y ΩB:
(xx:(xx:
BB
AA
B
A
→Ω∈→Ω∈
(1)
El proceso de alineación se realiza mediante la aplicación de una transformación geométrica a una de las imágenes. Se suele utilizar el símbolo T para representar esta transformación, y matemáticamente se la define como:
AB T(xxx:T −→ , ABA x)T(xxx: =− (2)
Si las imágenes representan la misma porción anatómica del paciente, los campos o dominios de visualización tienen regiones en común o áreas superpuestas. A esto se le denomina el dominio de superposición T
,BAΩ . Matemáticamente, el dominio de superposición se define como:
E

8
BAAABA Ω∈Ω∈=Ω − )(xT|xT,
1 (3)
La transformación inversa no siempre se encuentra definida. Sólo para el caso de transformaciones afín o de cuerpo rígido.
La transformación geométrica aplicada puede ser del tipo “espacial” o “en intensidad”. En el primer caso se calcula la transformación que provee el mapeo de conjuntos de puntos correspondientes a las características de interés entre ambas imágenes. A esta transformación se la suele denotar en la bibliografía como T, como se mostró en párrafos anteriores. En el segundo caso el mapeo se realiza también sobre la posición, pero además sobre el valor de intensidad en esa coordenada. La transformación geométrica se calcula iterativamente mediante la optimización de alguna medida de similaridad entre las intensidades de los vóxeles de ambas imágenes. En la mayoría de los casos se requiere la interpolación entre los puntos muestreados en cada iteración. A esta transformación se la suele denotar como T.
La imagen A es denominada “de referencia”, y la imagen B, la cual es transformada iterativamente se denomina imagen “fuente”. Se usa la notación BT para representar la imagen B transformada mediante la estimación actual de la transformación T. La imagen BT se encuentra definida dentro de las coordenadas espaciales de la imagen A. Los valores de los vóxeles en BT dependen del tipo de interpolación usada, de ahí el uso de T en vez de T como superíndice [7].
2 .2 . T ipos de t r ans for mación geomét r ica
Las transformaciones geométricas se pueden clasificar según la cantidad de grados de libertad o parámetros libres que posean ([6],[7]).
Según este criterio, una transformación puede ser:
Rígida: Sólo se permite la traslación en el sentido de los ejes coordenados y la rotación alrededor de ellos. No se produce ningún tipo de modificación en la forma del objeto, sino sólo en su posición. Este tipo de transformación es típicamente utilizado para el registro de estructuras anatómicas que se encuentran encerradas por hueso, como por ejemplo, imágenes correspondientes a cerebro. La transformación en este caso, utilizando coordenadas homogéneas, es la siguiente:
Trígido
−+−−−+
=
11000z
y
x
t
t
t
z
y
x
βαβαβγβαγαγβαγαγβγβαγαγβαγαγβ
coscoscossinsinsinsincoscossinsinsinsincoscossincoscossincossinsincossinsinsincoscoscos
(4)

9
Aquí α, β y γ representan los ángulos de rotación alrededor de los ejes coordenados, y tx, ty y tz las traslaciones en la dirección de los mismos. Por lo tanto en el caso de una transformación 3D-3D como la anterior se tienen en total 6 incógnitas o grados de libertad.
Similaridad (rígida + escalado): permite, además de un cambio en la posición del objeto representado, el aumento o disminución de su tamaño mediante la introducción de un factor de escala por cada eje coordenado. La transformación en este caso se define como:
Tescalado = (5)
Tsimilaridad = Trígido Tescalado (6)
En el caso tridimensional, se cuenta con 3 parámetros adicionales a los 6 de una transformación rígida, dando un total de 9 grados de libertad.
Proyectiva o perspectiva: se utiliza particularmente cuando el objetivo consiste en registrar una imagen 3D con una imagen 2D, como es el caso de una imagen de MR con una de rayos X. Esta transformación puede alcanzar hasta un total de 10 grados de libertad a ser resueltos por el algoritmo de registro. Sin embargo, 4 de estos parámetros son intrínsecos del sistema de adquisición de imagen, por lo que pueden ser determinados mediante la calibración de la cámara. Los otros 6 parámetros corresponden a una transformación del tipo rígido. En este caso, la transformación puede expresarse como:
==
01000000
0
0
vk
uk
v
u
proyecciónT (7)
T2D-3D = Tproyección Trígido (8)
Afín: permite realizar movimientos de cuerpo de rígido, escalamiento y corte, manteniendo el paralelismo entre líneas rectas. Este tipo de transformación suele aplicarse para corregir errores debidos a diferentes posicionamientos del paciente durante la
1000000000000
zo o m
zo o m
zo o m
zy
x
10
adquisición, o de los distintos pacientes en el registro intersujeto. La forma general de esta transformación se puede ver a continuación, con un total de 12 grados de libertad:
==
1000lkji
hgfe
dcba
afínT (9)
Elástica: también es llamada transformación no rígida. Se utiliza para realizar el registro de imágenes provenientes de distintos pacientes, individuo-atlas, o bien para registrar elementos correspondientes a tejidos blandos, deformables, como ser el caso de partes anatómicas que no se encuentran encerradas por hueso. Es útil además para el registro de imágenes pre y post quirúrgicas, donde determinadas estructuras han sido extraídas durante la intervención. En este caso la cantidad de parámetros varía desde sólo unos pocos (5 a 10) a una gran cantidad en otros algoritmos. Algunas de las técnicas más utilizadas para la determinación de estos grados de libertad consisten en el Análisis de Componentes Principales y elementos finitos. Para mayor información acerca del registro no rígido el lector puede remitirse a [4] y [5].
2 .3 . Clas i f icación de las t écnicas de r egis t r o
Existen distintos criterios según los cuales se clasifican las técnicas de registro. A continuación se describen algunos de los más utilizados [6].
2.3.1. Según la dimensionalidad de la transformación
2D-2D: las imágenes que se registran corresponden ambas a imágenes bidimensionales. Esto puede deberse a las características intrínsecas de la modalidad (por ejemplo imágenes de rayos X) o bien a que corresponden a cortes o secciones de imágenes tridimensionales, tales como imágenes de MR o CT.
2D-3D: una de las imágenes es bidimensional, como en el caso anterior, mientras que la otra es una imagen volumétrica. La técnica de registro debe permitir realizar la proyección de la imagen 3D sobre el plano en el cual se encuentra la imagen 2D.
3D-3D: ambas imágenes son tridimensionales por naturaleza, y la técnica de registro debe proveer la alineación de un volumen con el otro. Un ejemplo es el caso del registro MR-CT.
Tiempo: las imágenes a registrar constituyen una secuencia temporal que representa la evolución de algún proceso en el paciente. Un ejemplo de su aplicación es cuando se utilizan para observar la modificación de las estructuras cerebrales debidas al crecimiento durante la
11
niñez, o en el registro de imágenes prequirúrgicas con imágenes obtenidas luego de la intervención [8].
2.3.2. Según el tipo de transformación geométrica
El mismo criterio empleado en la sección 2.2 para la clasificación de las transformaciones geométricas puede ser aplicado también a las técnicas de registro, siendo del tipo:
Lineal: Rígido, de similaridad, proyectivo, afín
No lineal: Elástico o no rígido
2.3.3. Según los sujetos implicados
Intrasujeto: las imágenes pertenecen al mismo sujeto, pudiendo ser de la misma modalidad (como en el caso de imágenes pre y postquirúrgicas) o de modalidades diferentes.
Intersujeto: las imágenes provienen de distintos pacientes. Por lo general requiere de la aplicación de transformaciones del tipo elástico que permitan compensar las particularidades de forma y tamaño de cada individuo.
Sujeto-atlas: una de las imágenes proviene de un paciente, mientras que la otra corresponde a un atlas médico. Este tipo de registro ayuda al profesional en la interpretación de las imágenes reales y en la delineación de regiones anatómicas.
Sujeto-espacio físico: una imagen adquirida en forma previa se registra en tiempo real con el espacio físico del paciente. Es el caso típico de la cirugía asistida por imágenes.
2.3.4. Según las modalidades implicadas
Intramodalidad: las imágenes fueron adquiridas a partir de la misma modalidad.
Intermodalidad: el registro se realiza con imágenes provenientes de sistemas con diferentes principios físicos de generación de imagen.
2.3.5. Según el nivel de automatización
Manuales: el usuario realiza la rotación, traslación y deformación de una imagen hasta lograr la coincidencia geométrica con la otra.
Semiautomáticos: el usuario selecciona ciertas características de las imágenes las cuales son tomadas como referencias u objetivos del registro, y que se usan para la inicialización del proceso (marcadores anatómicos, superficies a segmentar).
Automáticos: se realiza la optimización de una función de costo relacionada con el grado de concordancia entre las imágenes. Requieren comprobación visual del resultado por parte del especialista.
12
2.3.6. Según las características sobre las cuales operan
Este criterio ha dado lugar a las categorías más importantes de clasificación de las técnicas de registro, por lo cual merece un análisis más detallado. Se realiza su descripción para el caso de una transformación del tipo rígido, pudiendo extender su aplicación al caso afín en forma directa.
Existen diversas maneras para llevar a cabo el cálculo de la transformación geométrica adecuada que provea la alineación entre las imágenes. Cada uno de estos modos utiliza distinta información proveniente de las mismas para hacer el registro. Agrupando estos métodos según las ideas esenciales en las cuales se basan para determinar la transformación, se han clasificado en técnicas que utilizan [7]:
- Correspondencia de marcadores.
- Ajuste de superficies.
- Medidas de similaridad entre vóxeles.
2.3.6.1. Técnicas basadas en correspondencia de marcadores.
Los marcadores son puntos homólogos tridimensionales que se identifican en las imágenes a ser registradas. Pueden ser de dos tipos: externos o anatómicos.
Los marcadores externos están constituidos por dispositivos visibles que se implantan en el paciente antes de la adquisición de las imágenes. Son de carácter invasivo para el individuo, ya que en la mayoría de los casos deben fijarse sobre estructuras óseas para evitar su desplazamiento. En otros casos se colocan sobre la piel, pero son menos fiables. Una de sus principales desventajas consiste en que debe planificarse su utilización en forma previa a la obtención de las imágenes.
Los marcadores anatómicos en cambio consisten en referencias puntuales visibles en ambas imágenes, correspondientes a alguna estructura anatómica de interés. Un usuario experimentado debe realizar su identificación sobre las imágenes adquiridas con anterioridad, por lo cual se utilizan en forma retrospectiva [8]. Constituyen un método no invasivo para el paciente pero presentan el inconveniente de requerir un tiempo adicional para la selección de los puntos (se han contabilizado de 10 a 15 minutos para un médico experimentado, y alrededor de 30 minutos para un médico residente [9]).
Este algoritmo provee de una solución directa al problema de registro. En un primer paso se calculan los centroides de los dos conjuntos de puntos seleccionados en ambas imágenes. Luego uno de los conjuntos se traslada según el valor indicado por la diferencia vectorial entre ambos centroides. Una vez que éstos se encuentran alineados, se calcula el ángulo de rotación en torno a los centros que minimiza la diferencia cuadrática entre los puntos de ambos conjuntos. Este valor determina la cantidad de grados que debe rotarse uno de los conjuntos para conseguir el mejor registro posible según el método.
La utilización de marcadores genera tres tipos principales de error en el proceso de registro. Uno de ellos es el llamado fiducial localization error (FLE), el cual surge como consecuencia de la identificación y marcado de los puntos homólogos, dado que esto depende de la precisión con la cual el usuario realiza la selección. El residuo que queda luego de la

13
minimización cuadrática del registro de los marcadores da lugar al denominado fiducial residual error (FRE). Por otro lado, la medida de mayor interés consiste en el valor conocido como target registration error (TRE), el cual es el error cometido en el registro de las estructuras objetivo, siendo su valor función del FLE [7].
2.3.6.2. Técnicas basadas en ajuste de superficies.
Los métodos que utilizan correspondencia de superficies requieren que en forma previa las imágenes hayan sido segmentadas. En general se utiliza la segmentación automática, pero esto es costoso computacionalmente y precisa en muchos casos que el usuario realice correcciones editándolas manualmente. Sin embargo, el error cometido en el proceso de registro es menor que para el caso de marcadores puntuales.
Esta técnica es muy utilizada en la actualidad pero se debe tener cuidado en su aplicación a imágenes donde las estructuras objetivo presenten características de simetría. Esto se debe a que una vez realizada la segmentación, sólo se preservan los contornos de los objetos, y en caso de existir formas simétricas los resultados del registro pueden ser erróneos.
2.3.6.2.1. Algoritmo head-hat
Este algoritmo ha sido utilizado frecuentemente para el registro MR-PET de imágenes de cabeza y corazón.
Como primera medida se realiza la identificación de las superficies equivalentes en ambas imágenes a registrar. Para la imagen de mayor resolución (MR) se determinan los contornos sobre cada sección 2D de la imagen tridimensional, y a la misma se la denomina “cabeza” ( head). A la imagen de menor resolución (PET) se la considera como un conjunto de puntos 3D desconectados, y a esta imagen se la conoce como “sombrero” ( hat).
A continuación se procede a transformar en forma iterativa el “sombrero” sobre la “cabeza”, hasta que se alcanza un ajuste aceptable. El objetivo consiste en minimizar el cuadrado de la distancia de cada punto del “sombrero” al contorno de la “cabeza”, en la dirección de su centroide.
Por lo general, las superficies que se identifican para llevar a cabo el registro corresponden a piel o a la superficie del cerebro, debido al alto contraste con que son representadas en la mayoría de las modalidades [7].
2.3.6.2.2. Algoritmo de transformaciones en distancia
Este algoritmo representa una mejora en el rendimiento de la técnica anterior, ya que realiza el cálculo de las distancias de cada voxel a la superficie del objeto en una etapa de preprocesamiento.
El método utiliza una imagen binaria en la cual se codifica con el valor 1 los vóxeles que corresponden al objeto, y con 0 el resto. En forma previa al registro, se calcula para cada voxel la distancia que existe entre él y la superficie. Este cálculo se realiza mediante una transformación en distancia [7].

14
Las transformaciones en distancia son transformaciones globales, y las más utilizadas son el filtro chamfer y la transformación en distancia euclídea exacta. El filtro chamfer es más rápido y menos complejo. Existen estudios en los cuales se ha verificado su aproximación con una diferencia máxima de la transformación en distancia euclídea de cerca del 2% [10].
2.3.6.2.3. Algoritmo del punto iterativo más cercano
Según esta técnica, una de las imágenes se considera como una superficie formada por un conjunto de puntos 3D, mientras que a la otra se la representa como una superficie constituida por un conjunto de parches o facets. Por lo general se utilizan parches triangulares.
En forma iterativa se calcula, para cada punto, el punto más cercano sobre el parche apropiado. El conjunto de los puntos más cercanos luego se registra usando correspondencia de marcadores [7].
2.3.6.3. Técnicas basadas en medidas de similaridad entre vóxeles.
Los métodos descritos en las secciones 2.3.6.1 y 2.3.6.2 calculan la transformación espacial T que provee la alineación entre las imágenes. Las técnicas que se detallan en los apartados siguientes realizan una aproximación iterativa a la transformación geométrica T como una transformación en intensidad que mapea, además de las posiciones del sistema de coordenadas, las intensidades de los vóxeles.
Estas técnicas tienen la ventaja de que utilizan toda la información disponible en las imágenes, y no sólo algunas de sus características. Para ello utilizan el valor de intensidad de todos los vóxeles como dato para actualizar en forma reiterada una función de costo a optimizar. No requieren que se aplique segmentación previa, y dan lugar a métodos de registro robustos y exactos completamente automatizados.
2.3.6.3.1. Algoritmo de minimización de la diferencia de intensidades
Esta técnica utiliza como función de costo la suma de las diferencias cuadráticas (SSD) de las intensidades entre la imagen de referencia y la imagen fuente transformada. La idea subyacente consiste en suponer que cuando las imágenes se encuentran registradas solamente difieren entre sí por ruido gaussiano o por pequeñas porciones anatómicas que se encuentran presentes en una y no en la otra, como en imágenes pre y post quirúrgicas. Esto ocasiona que la SSD sea mínima en esta situación.
Debido a esto es que su aplicación se restringe al registro intramodalidad serial. En imágenes intermodalidad las intensidades con las cuales se representan estructuras equivalentes suelen ser muy diferentes en cada imagen, por lo cual la SSD no es una medida representativa de la alineación en este caso.
La SSD es una medida muy sensible a pequeñas variaciones de intensidad entre las imágenes, dando valores altos cuando en realidad las diferencias entre las imágenes es pequeña. Por esta razón es común utilizar en cambio la suma de las diferencias absolutas de intensidad (SSA), la cual presenta en muchos casos un mejor desempeño [7].

15
2.3.6.3.2. Correlación cruzada
Consiste en realizar el cálculo del coeficiente de correlación cruzada entre la imagen fuente transformada y la de referencia. Cuando éstas se encuentran alineadas, la medida es máxima bajo el supuesto de que existe una relación lineal entre las intensidades de ambas. Su utilización se limita al registro de imágenes intramodalidad.
Esta técnica se puede aplicar sobre las imágenes completas, o bien es posible usar ventanas de tamaño predefinido. En este último caso la selección de la forma de la ventana no es trivial, debido a que dependiendo de la deformación que exista entre las imágenes el contenido visible en la ventana de una puede no corresponder totalmente al contenido de la otra. Además, existe una alta probabilidad de que aquellas zonas que no presentan formas salientes sean relacionadas con áreas erróneas de la otra imagen que presenten la misma característica [11].
La correlación cruzada puede llevarse a cabo también en el dominio de la frecuencia, haciendo uso de las propiedades de desplazamiento y rotación de la transformada de Fourier. Esto permite tratar a las operaciones de giro y traslación en forma separada reduciendo los tiempos de procesamiento [7].
2.3.6.3.3. Tasa de uniformidad de imagen (RIU)
Este algoritmo se utiliza para el registro de imágenes seriales pertenecientes a la misma modalidad, y su objetivo consiste en maximizar la uniformidad de intensidad entre ambas imágenes.
Se utiliza como punto de partida para el cálculo el cociente entre la imagen de referencia y la imagen fuente transformada. Con este resultado se procede a determinar el coeficiente de variabilidad, el cual constituye el valor de uniformidad a optimizar (RIU) [7].
2.3.6.3.4. Uniformidad de intensidad particionada (PIU)
El desarrollo de esta técnica ha permitido extender la aplicación del algoritmo RIU al registro de imágenes multimodales. El objetivo que persigue consiste en realizar la optimización de la uniformidad de intensidades en las imágenes, pero no en forma global, sino para cada bin (conjunto de nivel de intensidades).
El criterio se basa en el supuesto de que para cada intensidad en una imagen, los vóxeles de su entorno guardan una relación entre sí similar a la que tienen los vóxeles del entorno en la otra. Para ello, a una de las imágenes se la particiona en bins. Luego, para cada voxel de la otra imagen se intenta maximizar la uniformidad con cada conjunto de nivel de intensidad. El cálculo que se realiza es similar al RIU, pero acumulando las medidas de uniformidad obtenidas para cada bin [7].
2.3.6.3.5. Algoritmo de información mutua (MI)
Otras técnicas de registro surgen a partir de la idea de cuando dos imágenes se encuentran alineadas, se reduce la cantidad de información suministrada. Por ejemplo, se puede pensar en dos imágenes radiológicas correspondientes a la misma mano de dos

16
pacientes. Si las imágenes se encuentran registradas, se desea obtener otra imagen que contenga sólo cinco dedos, y no diez. Es decir, se busca maximizar el monto de información conjunta provista por ambas imágenes.
Según la teoría de la información, existe una métrica para la cantidad de información contenida en una determinada señal. Esta medida es la entropía propuesta por Shannon en 1948 [12], y la cual está definida como:
∑∑−−==i
ii ppH log (10)
donde H representa el valor medio de información que contribuye cada uno de los i símbolos presentes con probabilidad de ocurrencia pi.
Una característica importante que puede deducirse a partir de la ecuación anterior consiste en que la entropía alcanza su mínimo valor igual a cero cuando existe sólo un símbolo. El valor máximo se da para el caso de que los i símbolos se encuentren presentes con la misma probabilidad de ocurrencia.
Cuando se tienen dos imágenes A y B que representan las mismas estructuras anatómicas y que proveen de información complementaria, se puede calcular el monto de información que aporta cada una de ellas a través del cálculo de la entropía. Asimismo, se puede determinar cuánta información comparten entre sí mediante la medida de entropía conjunta, la cual se define como:
(( )) (( )) (( ))bapbapBAH BAa b
BA ,,, ,,ττ log∑∑∑∑−−== (11)
Cuanta mayor información compartida exista entre las imágenes, es decir, cuanto mejor alineadas se encuentren, menor es el valor de la entropía conjunta.
En la ecuación anterior, (( ))bap BA ,,τ representa la probabilidad conjunta de ocurrencia
de la intensidad a perteneciente a la imagen A y la intensidad b correspondiente a B. Estas probabilidades se pueden calcular mediante la construcción de un histograma conjunto. Éste se representa mediante un gráfico bidimensional cuyos ejes están constituidos por las intensidades o por los bins de cada una de las imágenes.
En este gráfico se colocan todas las combinaciones de intensidad existentes para todos los vóxeles que se corresponden en ambas imágenes. Luego se normaliza este histograma 2D dividiendo por el total de vóxeles en el dominio de superposición, obteniendo así una función de distribución de probabilidades (PDF) conjunta y discreta [7].
Algunos ejemplos de histogramas conjuntos se muestran en la Figura 2.1. Aquí se puede observar cómo existe una menor dispersión en la PDF conjunta cuando las imágenes están registradas, disminuyendo el valor de H(A,B). A medida que aumenta la desalineación también se incrementa la dispersión, y la entropía conjunta alcanza un mayor valor.

17
(a)
(b)
Figura 2.1: Ejemplo de histogramas conjuntos. (a) Dos imágenes iguales de MR de cabeza. (b) Una imagen de MR y otra de CT de cabeza. En ambos casos, las imágenes de la izquierda corresponden al caso en el cual se encuentran alineadas. Las imágenes del centro son cuando están desplazadas 20 píxeles en las direcciones x e y. Las de la derecha corresponden a una rotación de 10 grados.
Existen algoritmos de registro que utilizan la medida de entropía conjunta como función de costo a optimizar iterativamente. Sin embargo, este método presenta algunos inconvenientes relacionados con las transformaciones que sufre el dominio de superposición
T,BAΩ de las imágenes en cada iteración.
El problema mencionado se puede ejemplificar para el caso en el cual durante el proceso de registro una de las imágenes es afectada por una transformación que provoca que en T
,BAΩ sólo permanezca el fondo, constituido únicamente por unas pocas intensidades de baja magnitud y ruido. Esto ocasiona que el valor de la entropía conjunta adquiera un valor mínimo, resultando en una solución errónea para el alineamiento [7].
Una nueva métrica denominada información mutua (MI) se ha propuesto como alternativa a la anterior, mostrando un mejor desempeño en situaciones similares a la descrita anteriormente. Su utilización para el registro de imágenes médicas es muy reciente. Los

18
primeros trabajos presentados en el tema corresponden a Collignon [13], [14], y a Viola y Wells [15], [16].
Una definición matemática para la información mutua se muestra en la ecuación siguiente:
( ) ( ) ( ) ( ) ( ) ( )( ) ( )bpap
bapbapBAHBHAHBAI
BA
AB
a bAB τ
ττ
⋅=−+= ∑∑ T
,,,, log (12)
Esta fórmula combina el valor de la entropía conjunta con las entropías marginales de A y B. Cuando las imágenes se encuentran correctamente registradas el valor de información mutua es máximo, es decir para el caso en el cual H (A, B) es mínimo.
Mediante la introducción de los dos términos correspondientes a las entropías marginales se desfavorecen las situaciones del proceso iterativo de alineación en las cuales
T,BAΩ está constituido solamente por el fondo de las imágenes, ya que si bien en este caso la
entropía conjunta es mínima, lo mismo ocurre con H (A) y H (B).
Otra definición comúnmente usada para la información mutua es la siguiente:
(( )) (( )) (( )) (( )) (( ))BAHAHABHBHBAI ||, −−==−−== (13)
Según esta ecuación se aprecia que I (A, B) puede ser entendida como una medida de qué tan buen predictor es A de B (o de manera equivalente B de A). La entropía condicional mide la incertidumbre de que conocidos los valores de intensidad de A sea posible predecir los valores de B (o que conocidos los valores de intensidad de B sea posible predecir los valores de A). En este caso la información mutua es máxima cuando se cumple que esta incertidumbre se convierte en un mínimo [17].
Si bien el cálculo de I (A, B) mejora las situaciones problemáticas descritas para el dominio de superposición de las imágenes, existen ocasiones en las cuales no las resuelve completamente. Se puede citar como ejemplo el caso en el cual el entorno del paciente presenta intensidades de muy baja magnitud, incrementando más la suma de las entropías marginales que el valor de la entropía conjunta. Para solucionar estas situaciones se utiliza la información mutua normalizada (NMI), la cual se define como:
(( )) (( )) (( ))(( ))BAH
BHAHBAI
,,~ ++== (14)

19
2 .4 . P r epr oces amient o de imágenes
En los métodos de registro que utilizan la optimización de una función de costo, esta función se encuentra definida dentro de un espacio cuya dimensionalidad se corresponde con la cantidad de grados de libertad de T. Cuantos más parámetros posea la transformación este espacio de soluciones se vuelve más complejo.
Cuando las imágenes se encuentran registradas la función de costo adquiere un valor máximo, que teóricamente debería ser global. Sin embargo en la realidad esto no siempre se cumple, debido a que es posible que el máximo global se corresponda con una solución errónea de alineación, como en el caso en el cual el dominio de superposición de las imágenes contiene, luego de repetidas transformaciones, solamente aire y ruido perteneciente al fondo de las imágenes.
Debido a esta problemática, en muchas ocasiones el registro se resuelve usando un óptimo local de la función de costo. Existen varias alternativas para precondicionar las imágenes de manera de favorecer el alcance de la solución correcta. Una de éstas consiste en colocar en forma manual a las imágenes en posición cercana a la alineación, y restringir la búsqueda en el espacio de parámetros para que no exceda ciertos límites dentro de los cuales se supone que yace la solución correcta [7]. Otros métodos consisten en realizar operaciones de suavizado y reescalamiento de intensidad en las imágenes con el objeto de simplificar la superficie de la función de costo, y se describen en la presente sección [18].
2.4.1. Suavizado de las imágenes
El proceso de suavizado permite la reducción de variaciones rápidas de intensidad entre vóxeles vecinos. Esta operación se utiliza con el objeto de, por un lado, realizar un desenfoque para eliminar detalles pequeños de las imágenes y conservar los objetos grandes. Además permite la corrección de fragmentos de líneas perdidos, aunque provocando la pérdida de detalles y contornos. Por otro lado, se consigue la reducción de ruido existente originado durante la adquisición y transmisión de la señal de imagen.
Este procedimiento se puede llevar a cabo mediante la aplicación de un filtro pasa bajos gaussiano, el cual se define como [1]:
)/(),(),(2
02 2DvuDevuH −−== (15)
donde:
u, v: ejes coordenados del dominio frecuencial,
D(u, v): distancia sobre el plano (u, v) medida a partir de (0, 0)
D0: frecuencia de corte en píxeles. Cuando D (u, v) = D0, la función de transferencia está a 0.607 de su valor máximo.
/

20
Dado que la transformada de Fourier inversa de un filtro gaussiano también es gaussiana, la ventaja de utilizar este filtro frecuencial consiste en que se evita el efecto de sobredisparo. Este fenómeno se genera debido a la característica de discontinuidad de la función de transferencia de los filtros ideales, llamado fenómeno de Gibbs. La ocurrencia de este fenómeno ocasionaría la aparición de oscilaciones en la imagen filtrada y la introducción de artefactos en las mismas, originadas en el cálculo de la transformada de Fourier inversa. Sin embargo, este inconveniente se evita gracias a la implementación de un filtro gaussiano.
Este tipo de filtro posee una banda de transición más suave que otros, como por ejemplo el de Butterworth, produciendo una borrosidad más atenuada para la misma frecuencia de corte. En la Figura 2.2 se puede observar un gráfico en perspectiva y secciones transversales radiales de la función de transferencia de un filtro pasa bajos gaussiano.
(a) (b)
Figura 2.2: Gráficos correspondientes a la función de transferencia de un filtro gaussiano. (a) Gráfico 3D de la función de transferencia. (b) Secciones transversales radiales para distintos valores de la frecuencia de corte D0,
en píxeles.
2.4.2. Reescalado en intensidad
Las imágenes pueden contener sólo unos pocos vóxeles muy intensos, lo cual hace que los histogramas de las mismas contengan muchos ceros. Por esto, los algoritmos no trabajan con el conjunto completo de intensidades originales, sino que una vez que las imágenes han sido suavizadas se aplica un reescalado previo para procesar simultáneamente conjuntos de intensidades similares (rebinning). El reescalado permite, entonces, compensar la situación inicial e incrementar la velocidad de cómputo de las estadísticas.

21
El proceso de rebinning se lleva a cabo de la siguiente manera [18]:
−−>>
== caso otroen -(
si
minmaxmin
maxmin
)/())()(
RRBFRR
RR-RBFNI (16)
donde R es la intensidad de la imagen original, Rmax y Rmin son los valores de intensidad máximo y mínimo de la imagen original, NI es la intensidad de la nueva imagen y BF es el factor de reescalamiento.
2.4.3. Efecto del suavizado y el reescalado sobre la función de información mutua
Como se mencionó en párrafos anteriores, el aumento de parámetros en la transformación geométrica T hace que la forma y la dimensionalidad de la función de MI se torne más complejo. A modo de ejemplo se muestra en la Figura 2.3 el resultado de simulaciones realizadas por He y Narayana [18] en las cuales dos imágenes volumétricas de MR se rotan en forma relativa una con la otra alrededor de los ejes y y z .
Estas simulaciones permiten analizar la influencia del suavizado gaussiano y el reescalado de intensidad en la superficie de la función de costo MI para distintos valores de desviación del filtro gaussiano y tamaño de bins.
En estas simulaciones los efectos del filtrado gaussiano y el rebinning consisten en suavizar la forma de la función de MI, haciendo posible recuperar el pico cercano a la posición correcta correspondiente a la alineación de las imágenes, el cual no existía antes del preprocesamiento. Sin estas operaciones ninguna técnica de optimización global hubiera sido capaz de resolver el registro, debido a que el máximo global no siempre corresponde a la solución correcta. Respecto a la dependencia de la forma de la función de MI con los parámetros del suavizado y rebinning, He y Narayana [18] obtienen que al aumentar el tamaño y el desvío estándar del filtro gaussiano, la función de MI se incrementa, aclarando que no obtienen resultados definitivos que permitan establecer una dependencia directa entre ellos.
Sin embargo también se muestra que la irregularidad de la superficie no puede ser completamente eliminada mediante la aplicación de estas operaciones, existiendo aún extremos locales. Por esta razón es necesaria la implementación de una técnica de optimización global que permita alcanzar el registro satisfactorio.

22
(a) (b) (c)
(d) (e)
Figura 2.3: Efecto del rebinning y suavizado en la MI. (a) Imagen original sin suavizado ni rebinning. (b) Suavizado gaussiano con σ = 2. (c) Suavizado gaussiano con σ = 4. (d) Rebinning a 128. (e) Rebinning a 256.
2 .5 . F us ión de imágenes
La fusión es el proceso mediante el cual se combina en una única imagen la información complementaria proveniente de las imágenes que han sido registradas.
Existen distintas técnicas para llevar a cabo este procedimiento. A continuación se describen algunas de las utilizadas más comúnmente [19].
2.5.1. Cortinillas desplazables
Esta técnica consiste en mostrar ambas imágenes utilizando una línea divisoria móvil entre ellas (de forma vertical u horizontal). A cada lado de la línea se despliega sólo una de las imágenes. El usuario puede modificar la posición divisoria mediante el movimiento del mouse.

23
2.5.2. Cursores linkeados
Es una de las primeras técnicas que se utilizaron para fusionar imágenes médicas. Consiste en desplegar en pantalla las dos imágenes registradas una al lado de la otra. Cada una de ellas dispone de un cursor móvil, de manera que la posición del cursor en una es indicado mediante la ubicación del cursor correspondiente en la otra. De esta manera ambos punteros se mueven en forma coordinada, mostrando al usuario la correspondencia espacial de las estructuras anatómicas.
2.5.3. Superposición de color
Las imágenes originales ocupan bloques de uno o más vóxeles intercalados, y cada una de ellas se despliega con un color diferente. Otra posibilidad consiste en codificar una imagen en tono y la otra en intensidad, utilizando el modelo HSV (hue-saturation-value).
2.5.4. Sustracción de imágenes
Es una de las técnicas más sencillas. Consiste en mostrar al usuario la imagen diferencia de las dos que han sido registradas. Es aplicada para la fusión de imágenes seriales, debido a que luego de realizar la sustracción solamente quedan visibles aquellas estructuras que se encuentran en una imagen y no en la otra, además de ruido existente.
2.5.5. Campos de deformación
Es muy útil para la fusión de imágenes que han sido registradas mediante transformaciones geométricas complejas, del tipo no rígido. Consiste en mostrar un diagrama vectorial (o tensorial, según el caso) correspondiente a la deformación aplicada a una de las imágenes.
Un ejemplo de aplicación es en el caso de imágenes pre y post quirúrgicas, en una de las cuales existe una porción anatómica que luego de ser seccionada ya no es visible en la otra. Para el registro de ambas es necesario aplicar transformaciones de deformación a los tejidos blandos. La fusión se realiza mediante el despliegue del campo de deformación aplicado.
2.5.6. Manejo de transparencia (alpha blending)
Permite mostrar las imágenes registradas utilizando distintos grados de transparencia para cada una de ellas.
La técnica consiste en realizar un promedio ponderado para cada voxel de la imagen fusionada, mediante la aplicación de la ecuación siguiente:
[[ ]] [[ ]] [[ ]] 2 1 1 imagenimagenfusionada BGRBGRBGR ,,)(,,,, αα −−++== (17)
En la fórmula anterior el factor de ponderación α varía entre 0 y 1, y mide el grado de transparencia con el cual contribuye cada imagen al resultado final. Cuando vale 0 se ve

24
solamente una de las imágenes, y cuando vale 1 sólo se visualiza la segunda imagen registrada. Valores intermedios muestran la combinación de ambas.
Si las imágenes originales están representadas usando falso color, el promedio debe realizarse en cada canal RGB (red-green-blue) [9].

25
Capít u lo 3 . Algor i t mos genét icos
os algoritmos genéticos (AGs) constituyen una técnica perteneciente a la inteligencia computacional que simula el proceso de evolución de las especies en
la naturaleza. Una de sus aplicaciones más difundidas está orientada a la resolución de problemas de búsqueda y optimización.
En este capítulo se brindan los conceptos fundamentales acerca de su lógica y funcionamiento.
3 .1 . F undament os bás icos
Los AGs son una técnica robusta que permite hallar óptimos globales de funciones complejas en situaciones en las cuales otros métodos, como por ejemplo los de gradiente, se detendrían en valores locales. Realizan un barrido paralelo del espacio de soluciones, evaluando varias alternativas al mismo tiempo. Esto hace que puedan recorrerlo más rápidamente y en diferentes direcciones sin que los extremos locales se conviertan en una barrera para su exploración.
Esto es posible mediante la implementación de un sistema de funcionamiento basado en el concepto de población. La población es el conjunto de todas las soluciones posibles que se manejan en un mismo instante de tiempo, y está constituida por un conjunto de individuos. Cada individuo corresponde a una de las posibles alternativas planteada como resolución al problema.
Un individuo está formado por dos elementos fundamentales: el genotipo y el fenotipo. Se denomina genotipo a la estructura que codifica el valor de su solución como una sucesión limitada de bits. El fenotipo en cambio representa el mismo valor pero en el espacio de definición de la variable, como puede ser, por ejemplo, los parámetros reales de la transformación de alineación entre dos imágenes. Por lo tanto debe existir un medio (bajo la forma de una función) que permita transformar el genotipo en fenotipo y viceversa.
A simple vista parece innecesario tener la solución en codificación binaria, dado que en realidad el valor que interesa es el contenido del fenotipo. ¿Cuál es la razón, entonces, por la cual se requiere de esta conversión?
El genotipo se puede equiparar a los cromosomas de los seres vivos, y contienen toda la información genética acerca del individuo codificada en estructuras elementales denominadas genes. Cada gen provee parte de la información y se puede recombinar con genes de otros individuos para dar lugar a especímenes con características propias, o puede ser alterado a través de mutaciones. Estas operaciones actúan sobre los genes individuales o grupos de ellos, y no sobre el valor representado en el fenotipo.
Mediante la reproducción una especie pueda perdurar en el tiempo a través de sucesivas generaciones, en la medida en que se adapte a las condiciones ambientales impuestas por la naturaleza. Los AGs implementan este concepto de adaptación mediante el
L

26
uso de una función numérica que mide el grado de aptitud del individuo para resolver un determinado problema. A la misma se la denomina comúnmente “función de fitness” o “función de costo”, y se calcula utilizando el fenotipo.
En cada generación los fenotipos de todos los individuos son evaluados para determinar la bondad de su solución. Aquellos que brindan una mejor alternativa reciben un alto valor de fitness, mientras que los individuos con soluciones menos buenas o inaceptables reciben un fitness menor.
La clave acerca del por qué de la eficiencia de los AGs reside en el hecho de que en cada generación evolucionan a soluciones cada vez mejores, en un proceso de perfeccionamiento adaptativo. Esto es posible gracias a que durante la reproducción se beneficia a los individuos con fitness más alto. Esto no excluye a los otros para que también puedan reproducirse, solamente que con una menor probabilidad.
Se ha mencionado el término probabilidad, lo cual no es casual. En todo AG existe un factor aleatorio que es de vital importancia para su correcto desempeño. Esto también es propio de la naturaleza donde el azar cumple un papel significativo en la definición de situaciones que afectan a la adaptación de los individuos. Sin embargo, no todo es aleatorio. También son necesarios componentes determinísticos que permitan medir inequívocamente propiedades tales como la función de fitness y la conversión en ambos sentidos entre fenotipo y genotipo ([20], [21]).
3 .2 . E volución de un AG
Como se mencionó anteriormente, la evolución de los AGs se basa en las operaciones de reproducción de sus individuos y en la alteración genética. Además en la nueva población generalmente existen también individuos que subsisten de las anteriores, tal como ocurre en la naturaleza. Esto requiere que exista un proceso de selección previa que decida sobre cuáles individuos se aplicarán las operaciones mencionadas, y con qué criterio. Estos aspectos se describen en los apartados siguientes.
3.2.1. Proceso de reproducción
La reproducción es la fase durante la cual se genera la nueva población que sucederá a la actual. Existen varias consideraciones que se deben tener en cuenta al respecto cuando se diseña un AG.
Por un lado se debe decidir si la nueva población contendrá miembros provenientes de la población anterior, o si solamente estará constituida por aquellos “recién nacidos”. El porcentaje de individuos que se establece sean trasladados directamente a la nueva población es llamado “brecha generacional” [ 20].
Se debe especificar también qué porcentaje de los individuos actuales tendrán la posibilidad de reproducirse, convirtiéndose en progenitores.
Otra consideración importante consiste en determinar qué acción se toma respecto al mejor individuo (el de mejor fitness). Una opción que brinda muy buenos resultados consiste en transportarlo directamente a la nueva población, de manera de asegurar que en cada

27
generación no se pierde el mejor resultado. A esta operación se la conoce como “elitismo”, y si bien es un procedimiento que no existe en realidad en la naturaleza, incrementa notablemente el rendimiento del AG [20].
El mecanismo según el cual nacen los nuevos individuos se denomina “cruza”. Consiste en la mezcla de la información genética (contenida en el genotipo) a partir de los individuos seleccionados como progenitores. Por lo general se establece que por cada cruza existan dos progenitores que darán lugar a dos descendientes. Si bien no es el mecanismo estándar, también es posible utilizar más de dos padres.
La recombinación genética se realiza seleccionando al azar puntos de corte en cada cromosoma padre e intercambiando las partes. Si se elige un único punto se obtiene una cruza simple. Si en cambio existen dos o más puntos de corte se trata de una cruza múltiple [22]. En la Figura 3.1 se puede ver gráficamente cómo funciona este procedimiento.
(a)
(b)
Figura 3.1: (a) Reproducción mediante cruza simple. (b) Reproducción mediante cruza múltiple con dos puntos de cruza.

28
3.2.2. Alteraciones genéticas
Este mecanismo está representado por una operación denominada “mutación”. La misma consiste en cambiar uno o más bits del genotipo de un individuo por un valor aleatorio. Incluso el número de bits a ser mutados puede ser elegido también al azar. En el primer caso se trata de una mutación simple y en el segundo de una mutación múltiple.
Este suceso se realiza con una probabilidad muy baja (de alrededor de 0.001) debido a que modifica sustancialmente la información genética. Sin embargo, la utilización del elitismo permite aumentar la probabilidad de mutación [20]. La misma puede ser fija o bien ir adaptándose durante el proceso [22]. Sin embargo es de gran importancia para introducir alteraciones aleatorias en la población, permitiendo explorar sectores del espacio de búsqueda alejados de la tendencia poblacional y evitando caer en óptimos locales.
Este proceso simula la mutación genética que raramente sufren las especies naturales como producto de factores externos ambientales.
El efecto de la mutación sobre un cromosoma se puede observar en la Figura 3.2.
(a)
(b)
Figura 3.2: (a) Operación de mutación simple. (b) Operación de mutación múltiple con dos puntos de mutación.
29
3.2.3. Proceso de selección de individuos
Como se mencionó anteriormente, la cruza se realiza sobre aquellos individuos que han sido elegidos previamente para ser padres. La selección debe favorecer a los individuos más adaptados (los de mayor fitness) debido a que esto permite que la población evolucione hacia soluciones cada vez mejores al problema. Sin embargo, no debe excluirse por completo a los individuos menos buenos, los cuales pueden realizar valiosos aportes a la nueva generación.
Existen diversos mecanismos para llevar a cabo el proceso de selección. Todos ellos buscan, de distintas maneras, brindar a cada individuo oportunidades proporcionales a su fitness utilizando criterios diferentes.
Algunos de los métodos más utilizados son la selección basada en rangos, por competencia, y mediante ventanas ([20],[22]).
En la selección basada en rangos cada individuo tiene una probabilidad de ser elegido que es igual al cociente entre su fitness y la suma de los valores de fitness de todos los individuos. Mediante el cálculo de la probabilidad acumulativa para toda la población se definen los rangos que abarca cada uno. Luego se arroja un número al azar entre 0 y 1 y se verifica dentro de qué rango está incluido, quedando seleccionado el individuo correspondiente.
El método por competencias requiere que se elijan dos o más individuos en forma aleatoria, de manera que el que posea el mayor fitness entre ellos es el seleccionado para ser padre.
El método de ventanas en cambio ordena a todos los individuos según su fitness de mayor a menor. A continuación se generan sobre este ordenamiento tantas “ventanas” como padres se requieran. Se llama “ventana” al conjunto de individuos ordenados que tiene como frontera inferior el índice del primer individuo (el de mayor fitness) y como frontera superior un valor que se va incrementando con cada ventana hasta llegar al índice del último individuo de la lista. Para cada una de las ventanas se elige un índice aleatorio que corresponde a uno de los padres. Esto favorece a los mejores individuos debido a que participan en la mayor parte de las ventanas, mientras que los peores solamente tienen su oportunidad en unas pocas.
3 .3 . F uncionamient o de un AG
Como punto final se describe el proceso completo de un AG. El funcionamiento del mismo se muestra en el diagrama de flujo de la Figura 3.3.
Las especificaciones de diseño (cantidad de individuos, tamaño de los cromosomas, etc.) son establecidas por el usuario, constituyendo la entrada del algoritmo. Se define una población de N individuos cuyos cromosomas contengan bits aleatorios distribuidos uniformemente. A continuación se evalúa la población a partir de los fenotipos para determinar los valores de fitness iniciales. Para ello se debe convertir previamente el fenotipo en genotipo. Se ingresa entonces en un ciclo iterativo en el cual se realizan las operaciones de selección, reproducción y alteración genética sobre los genotipos. Se evalúa la nueva población y se verifica si se cumple o no la condición de verificación establecida en el bucle.

30
En caso de que así ocurra la solución al problema corresponde al fenotipo del individuo de mejor fitness.
Cada ciclo iterativo constituye una generación. Existen diversos criterios de finalización del algoritmo, entre ellos alcanzar un número máximo de generaciones, contabilizar la proporción de individuos cuyo fitness ha adquirido un valor previamente especificado, o que el mejor individuo haya obtenido un valor de fitness prefijado [21]. Sin embargo una forma conveniente de definir la condición de verificación consiste en contar las generaciones durante las cuales el mejor fitness se mantiene estable (invariable). Cuando el contador alcanza un cierto valor preestablecido por el usuario se finaliza el bucle.
Figura 3.3: Diagrama de flujo de un AG.
31
Capít u lo 4 . Des ar r ol lo del pr oyect o
n el presente capítulo se describe en forma específica y detallada la metodología de realización del proyecto, incluyendo las técnicas elegidas y la razón de su
selección, detalles técnicos de implementación y configuración de parámetros. También se explican las herramientas utilizadas y los resultados a los cuales se arribó, realizando un resumen de estadísticas que determinan la validación del método. Se describe además la interfaz de la aplicación desarrollada, así como también las opciones que le permiten al usuario su configuración y ejecución.
4 .1 . R equis i t os pr el iminar es
Con la implementación de este proyecto se buscó posibilitar el registro de imágenes médicas que pertenecieran a la misma o a diferentes modalidades, y al mismo o distintos sujetos. Esto se decidió sobre la base de alcanzar el diseño de un método versátil de registro, que fuera lo bastante general como para permitir que, sin modificaciones significativas en el proceso por parte del usuario final, fuera capaz de adaptarse a distintas situaciones y circunstancias, proveyendo un resultado satisfactorio y eficaz, que respetara el balance costo-beneficio.
Dadas las características del proyecto que se deseaba implementar, la primera técnica que se descartó fue el registro mediante marcadores externos, debido a que requería adquirir imágenes utilizando un método invasivo para el paciente. Luego de una revisión minuciosa de las técnicas alternativas, se seleccionó el registro mediante un método automático de procesamiento. La razón de esto fue, por un lado, ahorrar tiempo de proceso minimizando la intervención del usuario (por ejemplo en el marcado de puntos fiduciarios sobre imágenes ya adquiridas, que como se comentó en capítulos anteriores demanda un tiempo significativo) y, por otro lado, evitar errores ocasionados por esta misma intervención (por ejemplo, errores en la localización de marcadores).
Sin embargo, esta automatización del proceso no impide que el usuario final realice una instancia evaluativa visual sobre el resultado del registro, pudiendo modificar la configuración en caso de no haber obtenido la solución esperada. Para ello se diseñó una interfaz gráfica amigable para la configuración y ejecución por parte del usuario, permitiéndole configurar el entorno de variables y probar distintas distribuciones de manera sencilla, para que pudiera personalizar y controlar el proceso determinando el conjunto de parámetros más adecuado a la situación a resolver.
E

32
4 .2 . S elección de al t er nat ivas t écnicas
4.2.1. Técnica de registro
Planteados los requerimientos preliminares, se decidió implementar un método basado en medidas de similaridad de vóxeles, y más específicamente, el método basado en información mutua (MI). Tal como se mencionó oportunamente, la importancia de este método radica en su versatilidad para ser aplicado a imágenes de cualquier tipo, sin importar si se trata de un registro ínter o intrasujeto, ínter o intramodalidad. Además, su aplicación puede expandirse a disciplinas ajenas a la medicina, sin necesidad de realizar preprocesamientos específicos de las imágenes para cada aplicación.
Lo anterior no implica que no exista necesidad de preprocesar las imágenes originales, sino que este procedimiento es general y sólo depende de las características de las imágenes en sí (existencia de ruido, ajuste de contraste, etc.) y no del tipo de imagen o su modalidad de adquisición.
El método de MI se basa en conceptos originarios de la teoría de la información, y busca hallar una medida apropiada que permita determinar el grado de información compartida por las imágenes que se están alineando. La información mutua es una medida de cómo una imagen “explica” a la otra. Este método ha demostrado ser muy robusto e innovador en el ambiente científico, resultando en algoritmos de registro de cuerpo rígido completamente automatizados y muy usados en la actualidad.
4.2.2. Tipo de transformación
Debido a la técnica de registro elegida y a la disponibilidad de imágenes con las cuales se contaba (fundamentalmente imágenes de CT y MR correspondientes a cabeza), se optó por realizar un registro mediante transformaciones de cuerpo rígido. Es posible extender el tipo de transformación a una del tipo afín, posibilitando de esta manera el escalado de imágenes de ser necesario, principalmente en el caso del registro intersujeto.
La transformación afín es posible implementarla agregando como objetivos de búsqueda en el algoritmo de optimización los parámetros correspondientes a la escala en cada uno de los ejes coordenados. Aunque esta modificación es sencilla en el diseño e implementación, amplía de una manera sustancial el espacio de parámetros, haciendo factible su resolución pero mucho más lenta. Es por esta razón que si bien es posible el uso de una transformación afín, se implementó solamente el caso de una transformación de cuerpo rígido.
Bajo las condiciones mencionadas, el registro intersujeto puede ser realizado pero siempre desde una transformación de cuerpo rígido, es decir, basado en traslaciones y rotaciones de las imágenes.
Las imágenes con las cuales se trabajó, como se mencionó en párrafos anteriores, corresponden a imágenes de Tomografía Computada (CT) y Resonancia Magnética (MR) de cabeza, de distintos pacientes y del mismo paciente en diferentes momentos temporales. Estas imágenes son del tipo 3D, adquiridas en escala de grises, en formato TIFF, JPG o BMP. Para el registro se utilizaron cortes bidimensionales seleccionados a partir de las mismas.

33
4.2.3. Algoritmo de optimización
La técnica de registro elegida requiere una aproximación a la solución óptima en forma iterativa, en la cual una estimación inicial de la transformación se utiliza para calcular la medida de MI. El algoritmo de optimización debe realizar luego otra estimación de la transformación, evaluar el valor de MI, y continuar hasta converger, en el punto en el cual no puede encontrar otra transformación que permita obtener un resultado con un mejor valor de MI, dentro de los márgenes especificados de tolerancia.
Dado que cada punto en el espacio de parámetros corresponde a una estimación diferente de la transformación, la función del algoritmo de optimización es encontrar el máximo valor de MI dada cualquier estimación posible de inicialización, ya que en general existen múltiples óptimos dentro del espacio de parámetros (algunos pueden ser muy pequeños, producto de la interpolación o una correspondencia localmente buena entre las características o intensidades).
La técnica de optimización elegida corresponde a un Algoritmo Genético. El mismo utiliza múltiples estimaciones de la transformación en cada iteración resultando en múltiples soluciones, favoreciendo a aquellas que brindan un mayor valor de MI.
Se realiza una búsqueda de la solución en paralelo por todo el espacio de parámetros, convergiendo al óptimo global y no corriendo el riesgo de finalizar el proceso con un máximo local. Para lograr este propósito, la estimación inicial del algoritmo debe encontrarse dentro del “rango de captura” del óptimo correcto, es decir razonablemente cerca de la solución correcta. El tamaño del rango de captura depende de las características de las imágenes, y no puede ser conocido en forma previa, de modo que el usuario puede configurarla a partir de la interfaz.
4.2.4. Entorno de programación
El entorno de programación elegido para la implementación del proyecto es MatLab versión 6.1 (MathWorks Inc). La elección está basado en que MatLab provee un entorno matemático matricial apto para el manejo de imágenes (matrices 2D), con un amplio conjunto de funciones para el procesamiento de señales (diseño de filtros, etc.), y permite su aplicación al uso específico del tratamiento de imágenes mediante el Image Processing Toolbox, un paquete de funciones especialmente diseñadas para el procesamiento digital de imágenes y el despliegue visual de las mismas.
De manera adicional, MatLab permite diseñar y codificar la interfase gráfica que sirve como entorno de comunicación entre el usuario y la aplicación, mediante la programación de componentes visuales tales como ventanas, botones, etiquetas, barras de desplazamiento, cajas de texto, etc. De esta manera se dispone de un conjunto de herramientas adecuadas para el desarrollo e implementación de algoritmos de aplicación científica, dedicando la mayor parte del tiempo al perfeccionamiento de las técnicas específicas y quitando peso al diseño de funciones de propósito general.

34
4 .3 . E s t r uct ur a funcional de la apl icación
La estructura del proyecto puede dividirse en tres grandes módulos:
- Preprocesamiento de las imágenes originales
- Proceso iterativo de optimización de parámetros
- Postprocesamiento de las imágenes registradas
A continuación se describe en detalle cada uno de ellos.
4.3.1. Preprocesamiento de las imágenes originales
La técnica de registro empleada requiere que como primera medida las imágenes que se van a alinear reciban un procesamiento previo que es independiente del tipo de imagen o la modalidad según la cual hayan sido adquiridas. Es decir, todas las imágenes recibirán el mismo tipo de preprocesamiento.
La aplicación de técnicas de búsqueda global, como es por ejemplo un AG, garantiza mediante su implementación adecuada que se encuentre la solución global al problema de optimización. Sin embargo en la mayoría de los casos el óptimo global de la función de costo no se corresponde con los parámetros que resuelven el registro en forma correcta. Es decir que no se trata de un problema de la técnica de optimización sino de la función de costo.
El tipo de registro que se implementó en este proyecto da origen a un espacio de soluciones de cuatro dimensiones. Las tres variables independientes corresponden a la rotación xy y a las traslaciones en las direcciones x e y. Si la transformación geométrica en vez de ser rígida hubiera contenido más grados de libertad el número de dimensiones hubiera sido mayor. Esto hace que la forma de la función de MI se torne muy compleja, con gran cantidad de extremos locales y una alta probabilidad de que el máximo global no se corresponda con la alineación buscada.
Esta es la importancia de aplicar las operaciones de preprocesamiento descritas en la sección 2.4. El objetivo no es mejorar el desempeño de la técnica de optimización (que encontrará el óptimo global pero que sin embargo esto no resuelve el registro), sino suavizar y simplificar la forma de la función de costo para que el máximo global se ubique en la posición del espacio de soluciones donde los parámetros corresponden al alineamiento correcto.
Además resulta eficaz en estos casos restringir la búsqueda a un entorno dentro del cual se supone a priori que se encuentra la solución buscada. También es fundamental la verificación visual para determinar si el registro se realizó en forma satisfactoria o si se debe repetir el proceso con diferentes parámetros.
El usuario puede configurar ciertas características de este preproceso mediante la modificación de variables a través de la interfaz gráfica de la aplicación, dependiendo de las características particulares de las imágenes con las cuales va a trabajar. La forma de configurar estos parámetros será descripta en detalle en la sección donde se explica el funcionamiento de la interfaz. La presente sección aborda los aspectos técnicos.

35
4.3.1.1. Suavizado de las imágenes
La primera operación que se realiza sobre las imágenes a registrar consiste en la aplicación en el dominio frecuencial de un filtro pasa bajos gaussiano rotacionalmente simétrico, cuyo tamaño y desviación estándar puede ser configurado por el usuario. Los fundamentos teóricos acerca de este procedimiento fueron explicados en las secciones 2.4.1 y 2.4.3.
Un ejemplo del efecto de realizar el filtrado frecuencial de las imágenes puede observarse en la Figura 4.1. Este procedimiento es interno para el funcionamiento del algoritmo (no modifica el archivo de imagen original y no se muestra en pantalla).
4.3.1.2. Reescalado (rebinning) de las imágenes
Los conceptos teóricos de este procedimiento fueron introducidos en la sección 2.4.2 y 2.4.3. Esta operación es interna del proceso y no afecta al despliegue de las imágenes originales ni a las resultantes del registro.
En la Figura 4.2 se muestra como ejemplo el efecto de aplicar esta técnica a la imagen suavizada de la Figura 4.1 (b) con un reescalado de 128 bins.
(a) (b)
Figura 4.1: (a) Imagen original correspondiente a CT, obtenida de D. Hill y J. Jarosz [23] (b) Imagen suavizada mediante un filtro gaussiano de siete píxeles de tamaño y cinco píxeles de desviación.

36
(a) (b)
Figura 4.2: (a) Imagen suavizada mediante un filtro gaussiano de siete píxeles de tamaño y cinco píxeles de desviación. (b) Imagen suavizada reescalada a 128 bins.
4.3.2. Proceso iterativo de optimización de parámetros
La optimización se realiza en dos etapas consecutivas. En la primera de ellas se rastrea un espacio amplio de búsqueda, mientras que en la segunda el espacio se restringe a una pequeña desviación (configurable mediante la aplicación) alrededor del óptimo hallado en la primera etapa.
Lo antes mencionado implica que se realicen dos ciclos iterativos. En el primer caso se realiza una aproximación gruesa a la solución ideal, dado que a priori se desconoce el grado de desalineación entre las imágenes objeto del registro. La búsqueda dentro del espacio pequeño se utiliza para alcanzar una mayor resolución en los parámetros hallados. En cada caso, el procedimiento que se lleva a cabo es idéntico, tal como se describe a continuación.
El proceso comienza inicializando al azar una población de 10-40 individuos del algoritmo genético. Es importante que el número de individuos no sea demasiado pequeño de forma de garantizar la suficiente diversidad genética que permita alcanzar la solución. Sin embargo, una cantidad demasiado grande de individuos incrementa significativamente el costo computacional. Por esta razón se permite al usuario configurar este parámetro.
El AG utiliza un conjunto de individuos cada uno de los cuales representa una posible solución al problema de optimización. A cada uno se le asignó un cromosoma binario de 24 bits que constituye el genotipo de tres parámetros de 8 bits cada uno: traslación en x, traslación en y y rotación en el plano xy, correspondientes a una transformación rígida bidimensional.
Al individuo que posee una transformación geométrica más apropiada se lo debe “premiar”, mientras que a los que tienen transformaciones incorrectas, o menos correctas, se

37
los debe “castigar”. De esta manera la población podrá evolucionar hasta llegar a la solución que provea la mejor transformación rígida que pueda hallarse dentro del rango de captura.
Así, se procede a evaluar la población entera por primera vez. Para ello se realiza la conversión del genotipo al fenotipo de cada individuo y se aplica la transformación geométrica con dichos parámetros a la imagen fuente preprocesada. El siguiente paso consiste en calcular el histograma conjunto 2D entre la imagen base preprocesada y la imagen fuente recientemente transformada. Con este histograma se realiza el cálculo de las entropías y la información mutua (ver sección 2.3.6.3.5).
Cada solución potencial se asocia con un valor de fitness o costo, correspondiente al valor de información mutua, que mide qué tan buena es comparada con las otras soluciones de la población, y el mayor valor de fitness identifica al mejor individuo de la población.
Luego se continúa con la etapa de reproducción, utilizando para ello los genotipos. Los operadores artificiales de selección, cruza y mutación son aplicados para dar lugar a generaciones de individuos cada vez mejores (que provean mejores soluciones). El algoritmo conserva al mejor individuo en cada generación (elitismo), usando una probabilidad de cruza del 80% y una probabilidad de mutación simple del 10%. Se selecciona mediante competencias al 80% de los individuos para reproducirlos, asignando el resultado de la operación de cruza simple a individuos al azar. Los puntos de cruza y de mutación se determinan en forma aleatoria. El resto de los individuos se conserva intacto, incluyendo al mejor de la población.
Nuevamente se evalúa la población completa, y se repite todo el procedimiento hasta que el valor de fitness del mejor individuo se mantenga invariante dentro de una tolerancia dada durante un número máximo de iteraciones preestablecidas.
Los parámetros óptimos hallados en el espacio grande de búsqueda son el punto de partida para la búsqueda en el espacio pequeño, llevándose a cabo una nueva evolución de la población, repitiendo otra vez todo el procedimiento hasta lograr una nueva convergencia.
Luego se aplica la transformación óptima a la imagen fuente (sin suavizado ni rebbining), utilizando los mejores parámetros de traslación y rotación hallados, de manera tal de colocarla en concordancia espacial con la imagen de referencia.
4.3.3. Postprocesamiento de las imágenes registradas
Una vez registradas las dos imágenes, la información provista por ambas se despliega en una única imagen mediante el procedimiento de fusión. La técnica de fusión elegida para su implementación en el presente proyecto corresponde a una operación de suma con manejo de transparencia (ver sección 2.5.6). La misma fue seleccionada porque permite ver en una sola imagen las características correspondientes de las dos registradas, pudiendo identificar la localización exacta de las áreas de interés de una en las regiones concordantes de la otra.
Debido a que el preprocesamiento de las imágenes es totalmente transparente para el usuario, la fusión se realiza usando las imágenes originales registradas (es decir, sin ningún tipo de suavizado ni rebbining, excepto el suavizado que pueda surgir de la interpolación como producto de la transformación.
La fusión permite que puedan observarse ambas imágenes superpuestas, formando una única imagen en pseudocolor. A cada imagen se le asigna un color diferente y se utiliza el

38
parámetro α de transparencia para manejar el grado de aporte de color de cada una. La visualización se realiza ya sea mediante una animación de video, que muestra la transición progresiva de una imagen a la otra con valores incrementales de α, o bien en forma manual donde el usuario selecciona el cuadro con el grado de transparencia que quiere observar.
4 .4 . Des cr ipción de la int er faz y oper ación del s i s t ema
4.4.1. Ventana principal
El acceso a la aplicación se realiza mediante la entrada de la directiva “ register” en la ventana de comandos de MatLab. Este procedimiento abre la ventana principal de la aplicación cuya interfaz se visualiza en la Figura 4.3.
En el área principal de esta ventana pueden observarse dos grandes espacios en los cuales se ubican las imágenes que el usuario desea registrar. En el lugar correspondiente a la ubicación izquierda se aloja la imagen tomada como referencia, y así lo indica la etiqueta superior con el texto “ Reference Image”. En el espacio de la derecha se localiza la imagen que se registrará, mediante transformaciones geométricas, para alinearla con la de referencia. Nuevamente esta situación se indica mediante la etiqueta superior con el texto “ Image to register”.
En la parte inferior de la pantalla se encuentra la línea de estado, que al comienzo muestra el texto “ Ready.”. Esto indica al usuario que el sistema está listo para ejecutar cualquier solicitud que se le indique. Es muy importante que el usuario verifique los mensajes que contiene la línea de estado antes de realizar cualquier operación, debido a que solamente se atenderán las operaciones que solicite cuando el contenido de esta línea sea el de “ Ready.”.
Por debajo del área destinada a la visualización de las imágenes se encuentran dos botones que permiten seleccionar las imágenes con las cuales se desea trabajar. Haciendo clic en el primero de ellos, “ Open reference image...” se accede a un cuadro de diálogo en el cual se puede elegir la imagen de referencia. El segundo botón, “ Open image to register...”, abre un cuadro de diálogo idéntico al anterior pero que permite seleccionar la imagen a registrar.
El cuadro de diálogo “ Open image...” se muestra también en la Figura 4.3. El nombre de archivo puede ser ingresado mediante un cuadro de texto, o mediante el puntero del mouse. Una vez que el usuario se encuentra ubicado en el directorio deseado, puede obtener una vista previa de la imagen haciendo un clic con el botón principal sobre el nombre del archivo, como se observa en la misma figura. Esta previsualización se realiza directamente sobre el área de trabajo, permitiendo su comparación directa con la otra imagen.
Cuando la imagen seleccionada corresponde a la imagen deseada, se procede a su apertura con un doble clic sobre su nombre en la lista del cuadro de diálogo, tal como indica la línea de estado. Si se desea salir del cuadro de diálogo sin abrir la imagen, se utiliza el botón “ Cancel”.
La aplicación trabaja con imágenes que se encuentren en formato TIFF, BMP o JPG. Otros formatos de imagen no están soportados en esta versión.

39
Figura 4.3: Previsualización de la imagen a registrar en el área de trabajo antes de su apertura, permitiendo su comparación simultánea con la imagen de referencia.
Cada vez que se abre una imagen, su nombre y vía completos se visualizan debajo de la misma, para evitar posibles confusiones. Esto también se puede ver en la Figura 4.3, donde ha aparecido el nombre correspondiente del archivo de la imagen de referencia que se abrió previamente.
Una vez que ambas imágenes han sido cargadas, el usuario puede proceder a registrarlas o a realizar una fusión de las mismas, para verificar en forma visual el grado de alineación en forma preliminar al proceso de registro.
También se puede observar que debajo de las imágenes existe un recuadro con el título “ Solution parameters”, y que al comienzo aparece vacío. Aq uí es donde una vez terminado el proceso de registro se informarán los parámetros de la transformación geométrica óptima hallada para la alineación de las imágenes.
En el lado derecho de la ventana hay cuatro botones de operaciones. El último botón, “ Exit” , permite salir de la aplicación. Los otros tres botones merecen una explicación más detallada, y se describe tanto su función como su implementación en los apartados siguientes.
4.4.2. Configuración de parámetros
Se accede a esta función mediante el botón “ Settings” de la ventana principal. Al hacer clic sobre él, se despliega una ventana como la que muestra la Figura 4.4. La utilización de cajas de texto, botones radiales y barras de desplazamiento facilita al usuario la tarea de selección de los valores deseados.

40
En el sector etiquetado como “ Genetic Algorithm”, el usuario puede configurar la cantidad de individuos de la población, los valores de tolerancia e iteraciones máximas, y el tamaño del espacio de búsqueda, tal como se detalla a continuación:
• “ Population size”: Esta barra de desplazamiento es útil para establecer el tamaño de la población a usar. Los valores posibles se encuentran entre 10 y 40 individuos. Poblaciones demasiado pequeñas dificultan la existencia de la suficiente diversidad genética para la evolución, mientras que valores demasiado altos aumentan en exceso el costo computacional y por consiguiente el tiempo que se demora en llevar a cabo el registro. El valor por defecto ha sido establecido en 20 individuos, dado que en la mayoría de los casos con este número se alcanza un grado de precisión aceptable dentro de un tiempo razonable de procesamiento.
• “ Tolerance”: Esta caja de texto es un campo del tipo real, que permite definir el valor de tolerancia dentro del cual deberá mantenerse la diferencia entre el mejor fitness de una generación y el de la generación siguiente, para que la población evolucione en generaciones sucesivas. Mientras esta diferencia sea superior a la tolerancia, se reinicializará el contador de generaciones con fitness estable. El valor por defecto es 1e-21.
• “ Max. iterations”: Esta caja de texto es un campo del tipo entero. En él se especifica el número de generaciones consecutivas durante el cual la diferencia entre el mejor fitness de una generación y el de la generación siguiente deberá mantenerse por debajo de la tolerancia descripta en el ítem anterior, antes de aceptar la convergencia. El valor por defecto es 20, dando resultados aceptables. Valores muy grandes ralentizan la convergencia, mientras que valores pequeños favorecen la convergencia prematura.
Los tres parámetros descritos anteriormente se utilizan tanto para el espacio grande de búsqueda como para el pequeño. Las configuraciones correspondientes a cada espacio se especifican en el apartado denominado “ Search space”.
El espacio grande de búsqueda (“ Large search space”) posee tres parámetros de configuración, los cuales se describen a continuación:
• “ X-Traslation (pixels)”: A partir de esta barra de desplazamiento se puede establecer el rango de captura para la traslación de la imagen en el sentido horizontal (x). Los valores máximos permiten traslaciones de hasta 20 píxeles en ambos sentidos. El valor por defecto es de 15 píxeles.
• “ Y-Traslation (pixels)”: Similar al anterior, estable ce el rango de captura para la traslación de la imagen en el sentido vertical (y). Los valores máximos de este parámetro también permiten alcanzar hasta 20 píxeles de desplazamiento en ambos sentidos. El valor por defecto es de 15 píxeles.
• “ XY Rotation (degrees)”: Con esta barra de desplazamiento se puede seleccionar el rango de captura para la rotación en el plano xy (el plano sobre el cual se encuentra la imagen). El usuario puede configurar un valor de hasta 10 grados en ambos sentidos, que es por otra parte el valor por defecto.

41
Figura 4.4: Ventana de configuración de parámetros de la aplicación.
Una vez que el algoritmo ha encontrado los valores óptimos de registro en el espacio grande de la función de costo, realiza una búsqueda en torno a estos valores para lograr una mejor aproximación, dando lugar al espacio pequeño de búsqueda. El usuario puede definir el tamaño del mismo mediante la especificación de la desviación a considerar en torno a los parámetros óptimos hallados hasta el momento. Esto se realiza en el apartado “ Small search space” con la barra de desplazamiento “ Deviation from results obtained in large search space”. La desviación máxima que se puede establecer es de 5 píxeles para las trasl aciones y 5 grados para la rotación, siendo el valor predeterminado de 3 para ambos casos.
Los parámetros específicos de la etapa de preprocesamiento se pueden configurar en los sectores etiquetados como “ Gaussian Filter” y “ Binning Factor”.
Las características del filtro gaussiano se definen en el apartado “ Gaussian filter”, mediante la configuración de dos parámetros:
• “ Size (pixels)”: Permite fijar el tamaño del filtro gaussiano que se aplica, en píxeles. El valor por defecto es de 7, pudiendo configurarse hasta un tamaño mínimo de 3 y un máximo de 11 píxeles. Los tamaños posibles son números impares, asegurando así la utilización de máscaras localmente centradas.
• “ Deviation (pixels)”: Mide la desviación estándar del filtro gaussiano, en píxeles. El valor máximo que puede configurarse es de 7, siendo 5 el valor predeterminado.

42
El último apartado dentro de la ventana de configuración de parámetros corresponde a la sección “ Binning factor”. Aquí aparecen dos botones radiales que permiten al usuario seleccionar si desea que se utilicen 128 o 256 bins en la etapa de preprocesamiento (ver secciones 4.3.1.2 y 2.4.3). El valor por defecto es de 256 bins.
Finalmente, el botón “ OK” permite aceptar los cambios (en caso que se haya realizado alguno), mientras que el botón “ Cancel” los abandona, volviendo en ambos casos a la pantalla principal.
4.4.3. Proceso de registro
El proceso de registro se inicia cuando el usuario hace clic sobre el botón “ Register” de la ventana principal de la aplicación. Es importante que verifique que en la barra de estado aparece el mensaje “ Ready.”, indicando que la aplicación está lista para recibir la orden del usuario. Previamente se deberán haber cargado las dos imágenes con las cuales se desea trabajar, de la forma en que se explicó oportunamente (ver sección 4.4.1). En caso de que falte alguna de las dos imágenes, el usuario recibirá un mensaje de error.
Si se han cumplido los pasos expuestos anteriormente, comienza el registro y el usuario puede ver la evolución del proceso en la barra de estado, donde se actualizan generación tras generación los valores óptimos encontrados para la rotación en el plano xy, y las traslaciones en x e y. Además se muestra el número de generación correspondiente, indicando si corresponde al espacio grande o pequeño de búsqueda.
Una vez concluido el proceso de registro, en la barra de estado aparece nuevamente el mensaje “ Ready.” En el sector de la ven tana principal identificado como “ Solution parameters” pueden observarse los parámetros óptimos a los cuales convergió el proceso, y el tiempo de procesamiento insumido, en segundos. En el espacio correspondiente a la imagen fuente (“ Image to register”) la imagen original es reemplazada por su imagen transformada utilizando para ello los óptimos encontrados.
4.4.4. Fusión de imágenes
Este proceso se ejecuta haciendo clic sobre el botón “ Fusion” de la ventana principal, verificando previamente que en la barra de estado aparezca el mensaje “ Ready.”, indicando que el sistema se encuentra listo para recibir las órdenes del usuario.
La fusión se puede realizar sobre las imágenes originales, para lo cual es requisito indispensable que se hayan cargado las imágenes de referencia y fuente en forma previa. De lo contrario el sistema emite un mensaje de error.
Si las imágenes ya han sido registradas, la fusión se realiza con la imagen de referencia y la imagen fuente transformada.
Cuando se da comienzo a la fusión se puede observar en la barra de estado de la ventana correspondiente el mensaje “ Please wait...”, indicando que la aplicación se encuentra procesando la operación. Al cabo de unos segundos (depende del tamaño y la resolución de las imágenes a registrar) en la barra de estado de esta ventana aparece el mensaje “ Ready.”.
En la Figura 4.5 se puede ver la ventana mediante la cual se visualiza la fusión de dos imágenes que han sido registradas. En la misma se observa la imagen fusionada en la parte

43
central y a su derecha las referencias indicando los colores (en pseudocolor) asignados a la imagen de referencia y a la registrada. Debajo se encuentra una barra de desplazamiento que permite mostrar la fusión con distintos grados de transparencia para ambas imágenes, de manera de observar ciertos detalles de una dentro del contexto de la otra imagen.
El botón “ Play” da comienzo a la animación que automáticamente muestra la transición de la imagen de referencia a la imagen registrada y viceversa, haciendo variar el parámetro de transparencia.
La ventana de fusión de imágenes posee una barra de menús con distintas utilidades para el manejo de la misma. Estas utilidades incluyen opciones para guardar la ventana, crear una nueva ventana en blanco, cerrar la ventana, imprimir el contenido, seleccionar, copiar y pegar, entre otras. Son de particular interés las opciones que se describen en el párrafo siguiente.
Mediante la opción de menú “ View ◊ Figure Toolbar” se agrega a la ventana una barra de herramientas, tal como se muestra en la Figura 4.5. En la misma, el usuario dispone de opciones para seleccionar porciones de la ventana, agregar etiquetas de texto, flechas, líneas rectas, y lo que es aún más importante, realizar ajustes de tamaño (zoom) que le permiten observar con mayor detalle aquellas zonas de la imagen que resulten de fundamental interés. Finalmente, el botón “ Close” abandona la ventana regresando a la pantalla principal.
Figura 4.5: Ventana de fusión a la cual se le ha agregado la barra de herramientas.

44
4 .5 . R es ul t ados
En la presente sección se muestran los resultados a los cuales se arribó en el presente proyecto. Se probaron diferentes configuraciones de parámetros y se procedió al registro y fusión de imágenes de dos tipos: simulaciones por computadora, por un lado, e imágenes de casos reales, por otro.
4.5.1. Simulaciones por computadora
Las imágenes originales utilizadas en este apartado y sin ninguna transformación previa fueron obtenidas a partir de D. Hill y J. Jarros [23].
Las simulaciones que se usaron consisten en pares de imágenes desalineadas entre sí por transformaciones geométricas conocidas. A tales imágenes se les aplicó el proceso de registro y se compararon los parámetros obtenidos como resultado con los parámetros de transformación correctos. Para cada caso analizado, se ejecutaron 10 corridas y se calculó el promedio y la desviación estándar del ángulo de rotación xy y de las traslaciones en x e y halladas por la aplicación.
En las simulaciones de los casos 1 y 2 se analizaron dos factores: tamaño y desvío del filtro de suavizado. Una vez estudiados los mismos, se analizó el efecto de variar la configuración del algoritmo genético en el caso 3. Una vez ajustados estos parámetros del sistema se los aplicó para la resolución de casos reales.
En todas las simulaciones, salvo que se aclare explícitamente, se utilizó para el algoritmo genético una tolerancia de 1e-21 y un número de 20 iteraciones máximas. El rango de captura para la rotación xy se estableció en [-10, 10] y para las traslaciones en x e y se fijó en [-15, 15]. Para el espacio pequeño de búsqueda se determinó una desviación de 3 grados y píxeles respectivamente a partir de los valores óptimos hallados en el espacio grande de parámetros. Se utilizó además un reescalado de intensidad de 256 bins.
4.5.1.1. Caso 1: Dos imágenes de CT
Las imágenes de CT que se registraron en el primer caso de simulación son las que se muestran en la Figura 4.6.
Los resultados para este estudio con una población de 20 individuos usando distintos tamaños de filtro gaussiano y distintas desviaciones en la etapa de preprocesamiento, se resumen en Tabla 4.1, Tabla 4.2 y Tabla 4.3.

45
(a) (b)
Figura 4.6: Imágenes de CT usadas para la simulación del registro en el primer caso de estudio. (a) Imagen de referencia. (b) Imagen fuente.
Tabla 4.1: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 1, usando para el preprocesamiento un filtro gaussiano de 5
píxeles y 3 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -6,66 -1,46 12,99 1392,36 Corrida 2 -6,66 -1,46 12,99 1495,73 Corrida 3 -8,14 -5,53 16,66 1395,43 Corrida 4 -7,96 -5,08 16,33 1608,82 Corrida 5 -8,14 -5,53 16,66 1318,43 Corrida 6 -8,14 -5,53 16,66 1304,54 Corrida 7 -7,96 -5,08 16,33 1495,62 Corrida 8 -6,30 -0,94 12,66 1525,39 Corrida 9 -5,94 0,42 12,02 915,44 Corrida 10 -7,48 -3,65 15,01 1699,39
Promedio -7,34 -3,38 14,83 1415,12 Desviación estándar 0,86 2,30 1,94 214,90
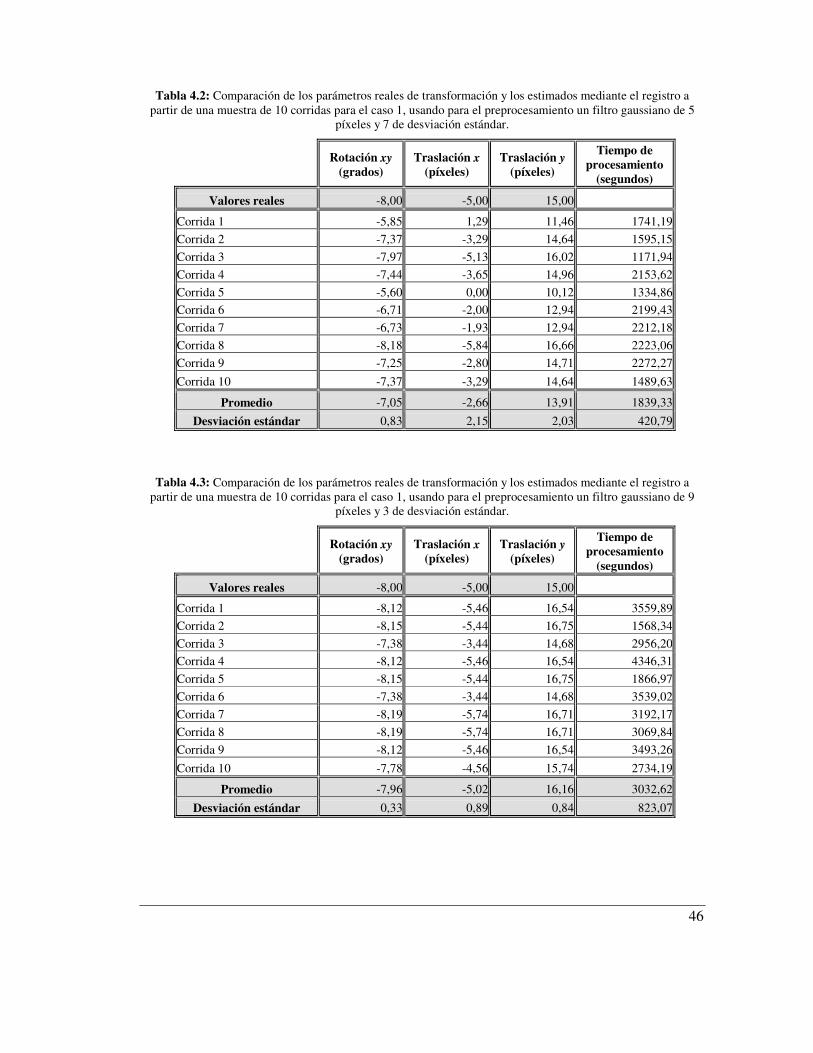
46
Tabla 4.2: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 1, usando para el preprocesamiento un filtro gaussiano de 5
píxeles y 7 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -5,85 1,29 11,46 1741,19 Corrida 2 -7,37 -3,29 14,64 1595,15 Corrida 3 -7,97 -5,13 16,02 1171,94 Corrida 4 -7,44 -3,65 14,96 2153,62 Corrida 5 -5,60 0,00 10,12 1334,86 Corrida 6 -6,71 -2,00 12,94 2199,43 Corrida 7 -6,73 -1,93 12,94 2212,18 Corrida 8 -8,18 -5,84 16,66 2223,06 Corrida 9 -7,25 -2,80 14,71 2272,27 Corrida 10 -7,37 -3,29 14,64 1489,63
Promedio -7,05 -2,66 13,91 1839,33 Desviación estándar 0,83 2,15 2,03 420,79
Tabla 4.3: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 1, usando para el preprocesamiento un filtro gaussiano de 9
píxeles y 3 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -8,12 -5,46 16,54 3559,89 Corrida 2 -8,15 -5,44 16,75 1568,34 Corrida 3 -7,38 -3,44 14,68 2956,20 Corrida 4 -8,12 -5,46 16,54 4346,31 Corrida 5 -8,15 -5,44 16,75 1866,97 Corrida 6 -7,38 -3,44 14,68 3539,02 Corrida 7 -8,19 -5,74 16,71 3192,17 Corrida 8 -8,19 -5,74 16,71 3069,84 Corrida 9 -8,12 -5,46 16,54 3493,26 Corrida 10 -7,78 -4,56 15,74 2734,19
Promedio -7,96 -5,02 16,16 3032,62
Desviación estándar 0,33 0,89 0,84 823,07

47
(a) (b) (c)
Figura 4.7: Imágenes de CT usadas para la simulación del registro en el primer caso de estudio. (a) Imagen de referencia. (b) Imagen fuente transformada. (c) Fusión de las imágenes registradas.
La imagen registrada junto con la imagen de referencia correspondientes a los valores promedio de la Tabla 4.3 pueden verse en la Figura 4.7, donde se evidencia que el registro ha sido realizado adecuadamente. También se puede observar que la imagen transformada se encuentra suavizada, producto de la interpolación requerida para alcanzar el registro. La fusión de ambas imágenes mediante alpha blending y pseudocolor también se muestra en la misma figura, coloreando en verde la imagen de referencia y en rojo la transformada. La superposición casi exacta de ambas da lugar a la particular tonalidad de la imagen fusionada (α=0.6).
4.5.1.2. Caso 2: Dos imágenes de MR
Las imágenes que se utilizaron para el estudio del segundo caso consisten en dos imágenes de MR que pueden verse en la Figura 4.8.
El resumen de los resultados obtenidos a partir de 10 corridas realizadas con una población de 20 individuos se describe en Tabla 4.4, Tabla 4.5 y Tabla 4.6.
El resultado del registro para los valores promedio de la Tabla 4.4 se muestra en la Figura 4.9. Nuevamente la fusión de las imágenes muestra que el registro ha sido satisfactorio. La tonalidad de la imagen fusionada es producto de la combinación en pseudocolor de la imagen de referencia (en verde) con la imagen transformada (en rojo) mediante el manejo de la transparencia. Aquí también, al igual que en el caso 1, la imagen transformada ha sufrido el suavizado debido al uso de métodos de interpolación en el proceso de transformación.
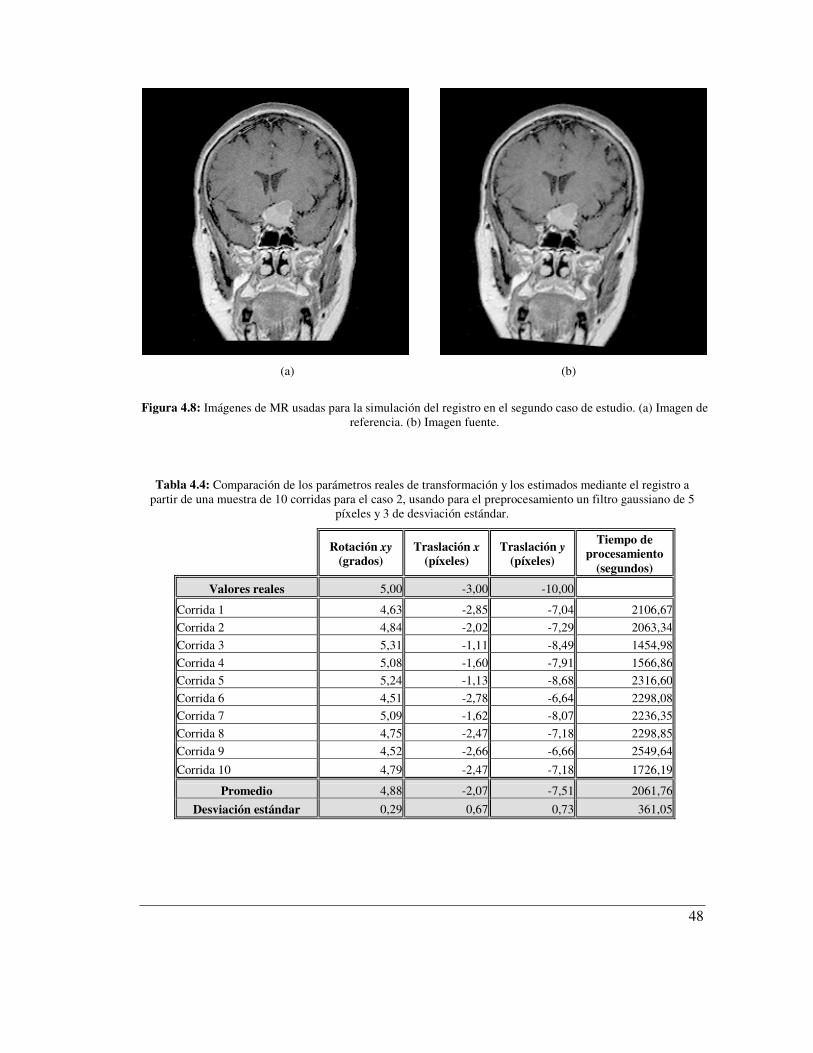
48
(a) (b)
Figura 4.8: Imágenes de MR usadas para la simulación del registro en el segundo caso de estudio. (a) Imagen de referencia. (b) Imagen fuente.
Tabla 4.4: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 2, usando para el preprocesamiento un filtro gaussiano de 5
píxeles y 3 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales 5,00 -3,00 -10,00
Corrida 1 4,63 -2,85 -7,04 2106,67 Corrida 2 4,84 -2,02 -7,29 2063,34 Corrida 3 5,31 -1,11 -8,49 1454,98 Corrida 4 5,08 -1,60 -7,91 1566,86 Corrida 5 5,24 -1,13 -8,68 2316,60 Corrida 6 4,51 -2,78 -6,64 2298,08 Corrida 7 5,09 -1,62 -8,07 2236,35 Corrida 8 4,75 -2,47 -7,18 2298,85 Corrida 9 4,52 -2,66 -6,66 2549,64 Corrida 10 4,79 -2,47 -7,18 1726,19
Promedio 4,88 -2,07 -7,51 2061,76 Desviación estándar 0,29 0,67 0,73 361,05

49
Tabla 4.5: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 2, usando para el preprocesamiento un filtro gaussiano de 5
píxeles y 7 de desviación estándar.
Tabla 4.6: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 2, usando para el preprocesamiento un filtro gaussiano de 9
píxeles y 3 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales 5,00 -3,00 -10,00
Corrida 1 4,78 -2,45 -7,51 2190,87 Corrida 2 4,79 -2,40 -7,46 2798,18 Corrida 3 5,09 -1,32 -7,76 2219,93 Corrida 4 5,05 -1,48 -7,72 1175,35 Corrida 5 5,05 -1,48 -7,72 1175,57 Corrida 6 5,16 -1,48 -8,28 1486,07 Corrida 7 4,61 -2,64 -6,78 1096,43 Corrida 8 4,21 -4,16 -6,19 1027,00 Corrida 9 3,99 -3,98 -4,94 1330,24 Corrida 10 4,82 -2,47 -7,51 1473,38
Promedio 4,76 -2,39 -7,19 1597,30 Desviación estándar 0,39 1,02 0,98 597,51
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales 5,00 -3,00 -10,00
Corrida 1 5,15 -1,41 -8,12 2165,66 Corrida 2 5,05 -1,60 -7,88 1642,27 Corrida 3 4,93 -1,74 -7,65 1995,28 Corrida 4 5,02 -1,84 -7,98 2783,79 Corrida 5 4,96 -1,88 -7,74 1829,19 Corrida 6 5,53 -0,42 -9,06 2710,90 Corrida 7 5,05 -1,41 -7,46 1381,38 Corrida 8 5,85 0,14 -9,67 1348,59 Corrida 9 5,08 -1,48 -7,72 1095,21 Corrida 10 5,11 -1,58 -8,26 1179,74
Promedio 5,17 -1,32 -8,15 1813,20 Desviación estándar 0,29 0,66 0,69 601,28

50
(a) (b) (c)
Figura 4.9: Imágenes de MR usadas para la simulación del registro en el segundo caso de estudio. (a) Imagen de referencia. (b) Imagen fuente transformada. (c) Fusión de las imágenes registradas.
4.5.1.3. Análisis de resultados
A partir de los resultados obtenidos en los casos 1 y 2 detallados anteriormente se puede concluir que, a igual tamaño del filtro (5 píxeles), al aumentar el desvío las estimaciones empeoran. Por esta razón para el caso 3 se decidió mantener el desvío en un valor bajo y estudiar el efecto de aumentar el tamaño del filtro.
Del análisis de los experimentos para igual valor de desvío se observa que al aumentar el tamaño del filtro los resultados mejoran en el caso 1 y empeoran en el 2, lo cual sugiere que este valor depende de los detalles particulares de las imágenes analizadas.
La forma de la función de MI varía de acuerdo a las características de los histogramas de las imágenes a registrar, por lo que en algunos casos un filtro de mayor tamaño resulta más adecuado que otro más pequeño. Respecto al desvío estándar, en todos los casos experimentados en este trabajo se obtienen mejores resultados manteniendo el desvío estándar en valores bajos.
4.5.1.4. Caso 3: Imagen de MR con imagen de CT
El tercer caso consiste en el registro de la imagen de MR de la Figura 4.8 (a) con la imagen de CT de la Figura 4.6 (b). Los resultados de 10 corridas para distintas configuraciones de parámetros se describen en la Tabla 4.7, Tabla 4.8 y Tabla 4.9.
En base al análisis realizado en la sección anterior, en los dos primeros grupos de corridas se utilizó un filtro gaussiano de talla media (7 píxeles) y un valor bajo de desviación estándar (3 píxeles). En el primer grupo se consideró una población de 20 individuos en el AG y un rango de [-15, 15] píxeles para las traslaciones en x e y para el espacio grande de búsqueda. En el segundo grupo se usó una población de 40 individuos y un espacio grande de búsqueda con un rango de [-20, 20] píxeles para la traslación en y.
En el tercer grupo de corridas se cambió la configuración por un filtro de 9 píxeles con 3 de desvío estándar. Se mantuvo la configuración del AG dado que se observa una mejora con 40 individuos y [-20, 20] píxeles para la traslación en y.

51
Ambas imágenes registradas para el mejor promedio obtenido (correspondiente a la Tabla 4.8) se pueden ver en la Figura 4.10.
Tabla 4.7: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 3, usando para el preprocesamiento un filtro gaussiano de 7
píxeles y 3 de desviación estándar.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -4,69 0,07 1,32 1575,76 Corrida 2 -7,42 -5,53 7,51 1248,62 Corrida 3 -4,37 0,52 0,96 1162,44 Corrida 4 -7,96 -6,73 8,75 1094,61 Corrida 5 -7,47 -5,72 7,76 1016,95 Corrida 6 -8,96 -8,99 10,82 1258,35 Corrida 7 -5,97 -2,63 5,22 1979,96 Corrida 8 -7,45 -5,36 8,07 1476,34 Corrida 9 -8,45 -7,11 9,74 2047,35 Corrida 10 -7,75 -5,74 8,05 2027,19
Promedio -7,05 -4,72 6,82 1488,76
Desviación estándar 1,54 3,09 3,33 400,85
Tabla 4.8: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 3, usando para el preprocesamiento un filtro gaussiano de 7
píxeles y 3 de desviación estándar, con una población de 40 individuos para el AG y un rango del espacio grande de búsqueda de [-20, 20] píxeles para la traslación en y.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -5,73 -2,54 4,65 2940,00 Corrida 2 -7,34 -5,74 8,13 2814,44 Corrida 3 -7,49 -6,07 8,70 3203,86 Corrida 4 -8,09 -6,75 9,09 3474,14 Corrida 5 -6,99 -4,45 7,28 2408,54 Corrida 6 -7,83 -5,65 8,95 3832,20 Corrida 7 -7,39 -5,60 7,27 2008,41 Corrida 8 -7,59 -5,48 7,78 3232,20 Corrida 9 -7,39 -5,53 7,41 3424,88 Corrida 10 -6,86 -4,56 7,02 5439,05
Promedio -7,27 -5,24 7,63 3277,77 Desviación estándar 0,65 1,16 1,28 927,47

52
Tabla 4.9: Comparación de los parámetros reales de transformación y los estimados mediante el registro a partir de una muestra de 10 corridas para el caso 3, usando para el preprocesamiento un filtro gaussiano de 9
píxeles y 3 de desviación estándar, con una población de 40 individuos en el AG y un rango del espacio grande de búsqueda de [-20, 20] píxeles para la traslación en y.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
Valores reales -8,00 -5,00 15,00
Corrida 1 -8,74 -8,23 9,31 2289,52 Corrida 2 -7,29 -5,62 7,92 3532,15 Corrida 3 -9,20 -8,68 10,96 1627,83 Corrida 4 -8,36 -7,43 9,33 2920,12 Corrida 5 -8,76 -8,56 9,98 1959,03 Corrida 6 -6,32 -3,20 5,63 1782,33 Corrida 7 -8,80 -8,35 9,50 2699,37 Corrida 8 -8,31 -6,75 9,53 2513,88 Corrida 9 -8,38 -7,06 9,46 3573,45 Corrida 10 -10,28 -11,36 12,77 3267,96
Promedio -8,44 -7,52 9,44 2616,56
Desviación estándar 1,06 2,15 1,84 707,16
(a) (b)
Figura 4.10: Imágenes registradas para el tercer caso de estudio. (a) Imagen de MR de referencia. (b) Imagen de CT transformada.

53
La fusión de ambas imágenes en forma previa y posterior al proceso de registro se observa en la Figura 4.11.
(a) (b)
Figura 4.11: Imágenes de MR y CT fusionadas. (a) Antes del registro (b) Después del registro.
4.5.2. Casos reales
El estudio de casos reales tiene, por un lado, la desventaja de que se desconoce la transformación exacta que debe aplicarse para registrar las imágenes, impidiendo la verificación de los parámetros hallados mediante su comparación. Sin embargo, es de fundamental importancia ya que coloca al proceso completo dentro de una situación total de realismo idéntica a aquellas en las cuales el método deberá ser aplicado.
El caso abordado fue extraído de una base de datos perteneciente al Swiss Medical Weekly [24]. Consiste en cuatro imágenes médicas (una de CT y tres de MR) tomadas en diferentes etapas de la vida, pertenecientes a un paciente nacido en 1956, el cual sufrió un envenenamiento accidental con monóxido de carbono a la edad de 15 años.
Luego de las 8 primeras semanas en estado de coma, se produjo un estado irreversible con diversos déficits psicomotores y neurofisiológicos. Dos años después comenzaron síntomas epilépticos. Sin embargo, hasta 1996 el paciente era capaz de trabajar en un ambiente protegido y desenvolverse parcialmente por sus propios medios. Pero a partir de entonces sus capacidades cognitivas se deterioraron marcadamente.
El análisis de imágenes seriales y multimodalidad superpuestas ayuda a determinar las causas del deterioro, permitiendo a los especialistas evaluar la localización de las zonas afectadas y sus dimensiones. A partir de la fusión es posible ver la evolución de la enfermedad a través del tiempo.

54
La primera imagen corresponde a una CT tomada en agosto de 1984. La segunda imagen es una MR tomada en septiembre de 1995. Las últimas dos imágenes son MR de distintos tipos adquiridas en marzo de 1997. Todas ellas se observan en la Figura 4.12.
El registro de estas imágenes se realizó con una población de 40 individuos para el algoritmo genético, una tolerancia de 1e-21 y un número de 20 iteraciones máximas. Se utilizó además un reescalamiento de intensidad de 256 bins y un filtro gaussiano de 7 píxeles con una desviación estándar de 3. Estos parámetros se seleccionaron en base a la mejor combinación obtenida en el análisis de los casos simulados.
(a) (b)
(c) (d)
Figura 4.12: Imágenes pertenecientes a un paciente intoxicado con monóxido de carbono. (a) CT de 08/1984. (b) MR (T –weighted) de 09/1995. (c) MR (T –weighted) de 03/1997. (d) MR (T image) de 03/1997.

55
4.5.2.1. Registro y fusión de la primera imagen (CT) con la segunda (MR).
Los resultados del registro de ambas imágenes se observan en la Figura 4.13. La fusión antes y después del registro se puede ver con dos grados diferentes de transparencia en la Figura 4.14.
(a) (b)
Figura 4.13: Imágenes registradas para el caso real. (a) Imagen de CT de la Figura 4.12(a) tomada como referencia. (b) Imagen de MR de la Figura 4.12(b) transformada.
Los parámetros hallados por el proceso de registro y que proveen de la transformación que alinea ambas imágenes corresponden a los mostrados en la Tabla 4.8.
Tabla 4.10: Parámetros de transformación obtenidos en el registro de la primera imagen (CT) y segunda imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
-6,62 -14,99 15,74 1925,74

56
(a) (b)
(c) (d)
Figura 4.14: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,5. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,5. (c) Imagen
fusionada previa al registro, con una transparencia α = 0,7. (d) Imagen fusionada posterior al registro, con una transparencia α = 0,7.
4.5.2.2. Registro y fusión de la primera imagen (CT) con la tercera (MR).
Las imágenes registradas se pueden observar en la Figura 4.15. Los parámetros de transformación optimizados se muestran en la Tabla 4.11. El resultado de la fusión de ambas imágenes se presenta en la Figura 4.16.

57
(a) (b)
Figura 4.15: Imágenes registradas para el caso real. (a) Imagen de CT de la Figura 4.12(a) tomada como referencia. (b) Imagen de MR de la Figura 4.12(c) transformada.
Tabla 4.11: Parámetros de transformación obtenidos en el registro de la primera imagen (CT) y tercera imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
-7,91 -19,38 18,80 3946,67
4.5.2.3. Registro y fusión de la primera imagen (CT) con la cuarta (MR).
En la Figura 4.17 se pueden ver ambas imágenes registradas. Los parámetros optimizados se detallan en la Tabla 4.12. La fusión de las imágenes se observa en la Figura 4.18.
Las imágenes al comienzo se encuentran prácticamente alineadas, por lo cual los parámetros de transformación hallados en el registro implican cambios insignificantes sobre la imagen de MR a transformar. Esto se evidencia también en la similitud de las imágenes fusionadas en forma previa y posterior al registro.

58
(a) (b)
Figura 4.16: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,6. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,6.
(a) (b)
Figura 4.17: Imágenes registradas para el caso real. (a) Imagen de CT de la Figura 4.12(a) tomada como referencia. (b) Imagen de MR de la Figura 4.12(d) transformada.

59
Tabla 4.12: Parámetros de transformación obtenidos en el registro de la primera imagen (CT) y cuarta imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
0,06 3,09 1,76 3184,58
(a) (b)
(c) (d)
Figura 4.18: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,6. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,6. (c) Imagen
fusionada previa al registro, con una transparencia α = 0,8. (d) Imagen fusionada posterior al registro, con una transparencia α = 0,8.

60
4.5.2.4. Registro y fusión de la segunda imagen (MR) con la tercera (MR).
El registro realizado sobre las imágenes se puede ver en la Figura 4.19. El ángulo de rotación xy, y traslaciones a lo largo de los ejes x e y se muestran en la Tabla 4.13. La fusión de las imágenes se presenta en la Figura 4.20.
(a) (b)
Figura 4.19: Imágenes registradas para el caso real. (a) Imagen de MR de la Figura 4.12(b) tomada como referencia. (b) Imagen de MR de la Figura 4.12(c) transformada.
Tabla 4.13: Parámetros de transformación obtenidos en el registro de la segunda imagen (MR) y tercera imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
-1,03 -1,53 3,39 2334,94
Aquí también, igual que en el caso anterior, al principio las imágenes se encuentran ya casi totalmente alineadas. Por esta razón el proceso de registro realiza pequeños cambios sobre la imagen de MR a transformar, sin que se noten grandes diferencias entre la fusión previa y la posterior al registro.

61
(a) (b)
(c) (d)
Figura 4.20: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,4. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,4. (c) Imagen
fusionada previa al registro, con una transparencia α = 0,6. (d) Imagen fusionada posterior al registro, con una transparencia α = 0,6.
4.5.2.5. Registro y fusión de la segunda imagen (MR) con la cuarta (MR).
Las imágenes registradas se observan en la Figura 4.21. En la Tabla 4.14 se muestran los parámetros de transformación hallados durante el proceso. Ambas imágenes fusionadas antes y después del registro se visualizan en la Figura 4.22.

62
(a) (b)
Figura 4.21: Imágenes registradas para el caso real. (a) Imagen de MR de la Figura 4.12(b) tomada como referencia. (b) Imagen de MR de la Figura 4.12(d) transformada.
Tabla 4.14: Parámetros de transformación obtenidos en el registro de la segunda imagen (MR) y cuarta imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
7,16 17,74 -16,80 3197,65

63
(a) (b)
(c) (d)
(e) (f)
Figura 4.22: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,6. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,6. (c) Zoom de la
parte superior, previo al registro. (d) Zoom de la parte superior, posterior al registro. (e) Zoom de la parte inferior, previo al registro. (d) Zoom de la parte inferior, posterior al registro.

64
4.5.2.6. Registro y fusión de la tercera imagen (MR) con la cuarta (MR).
El último caso mostrado corresponde al registro serial entre las imágenes tercera y cuarta de MR mostradas en la Figura 4.12. El resultado del proceso para ambas imágenes se puede observar en la Figura 4.23. También se detallan los parámetros de la transformación optimizada encontrada por el método en la Tabla 4.15. Finalmente, la fusión de ambas se muestra en la Figura 4.24.
(a) (b)
Figura 4.23: Imágenes registradas para el caso real. (a) Imagen de MR de la Figura 4.12(c) tomada como referencia. (b) Imagen de MR de la Figura 4.12(d) transformada.
Tabla 4.15: Parámetros de transformación obtenidos en el registro de la tercera imagen (MR) y cuarta imagen (MR) de la Figura 4.12.
Rotación xy (grados)
Traslación x (píxeles)
Traslación y (píxeles)
Tiempo de procesamiento
(segundos)
4,04 10,94 -9,28 2446,99
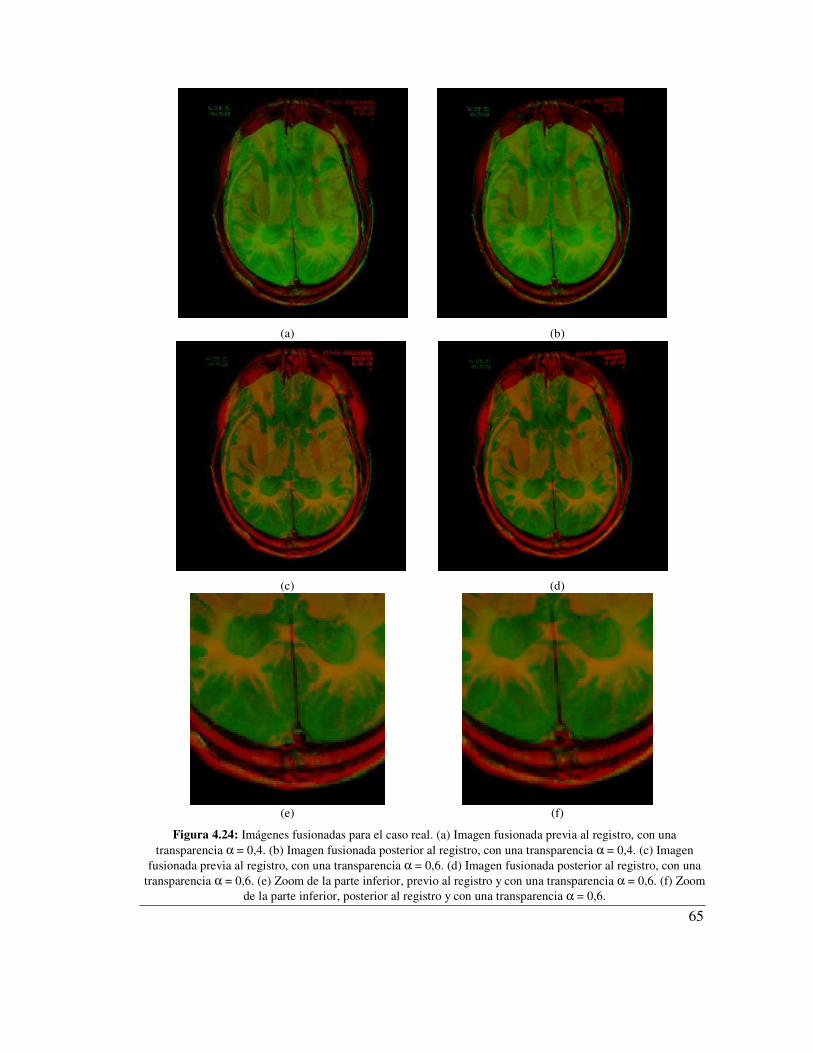
65
(a) (b)
(c) (d)
(e) (f)
Figura 4.24: Imágenes fusionadas para el caso real. (a) Imagen fusionada previa al registro, con una transparencia α = 0,4. (b) Imagen fusionada posterior al registro, con una transparencia α = 0,4. (c) Imagen
fusionada previa al registro, con una transparencia α = 0,6. (d) Imagen fusionada posterior al registro, con una transparencia α = 0,6. (e) Zoom de la parte inferior, previo al registro y con una transparencia α = 0,6. (f) Zoom
de la parte inferior, posterior al registro y con una transparencia α = 0,6.

66
Capít u lo 5 . E valuación económico-f inancier a
l presente capítulo aborda el análisis de los factores económico-financieros intervinientes en la realización del proyecto. Se considera en primer lugar la
situación de que el proyecto hubiera sido desarrollado por un ingeniero novel con valores de los costos a precio de mercado, detallando el análisis correspondiente. Luego se compara este contexto con el caso real, en el cual el desarrollador es un estudiante universitario avanzado.
Debido a que el producto final del proyecto consiste en una aplicación de software para el registro y fusión de imágenes médicas, el análisis económico-financiero se corresponde al de desarrollo de un prototipo.
5 .1 . Cos t os de des ar r ol lo por un ingenier o novel
Los factores intervinientes en el desarrollo del proyecto corresponden a tres tipos: recursos humanos, gastos varios y bienes de capital. A continuación se describe en detalle cada uno de ellos.
5.1.1. Recursos humanos
Están constituidos por el costo en concepto de honorarios de un ingeniero categoría novel encargado del desarrollo así como también del Director del proyecto.
El tiempo de desarrollo empleado consistió en 6 meses con una dedicación parcial (20 horas semanales), valuándose el costo de la hora para un ingeniero novel en $10.
El costo de honorarios correspondiente al Director se calcula a partir de una dedicación de 4 horas semanales abocadas al proyecto durante 6 meses, a un valor de $ 15 la hora.
El cálculo de costos en cuanto a recursos humanos se detalla en la Tabla 5.1, y un gráfico comparativo de los mismos en el Gráfico 5.1.
Tabla 5.1: Cálculo de costos correspondientes a recursos humanos.
Descripción Meses Horas por semana Total de horas Costo por hora Total parcial
Honorarios de un
ingeniero novel 6 20 480 $ 10,00 $ 4800,00
Honorarios del
Director 6 4 96 $ 15,00 $ 1440,00
Total $ 6240,00
E

67
Gráfico 5.1: Porcentajes de costos correspondientes a recursos humanos.
Porcentajes de costos correspondientes a recursos humanos
Honorarios de un ingeniero novel
77%
Honorarios del Director
23%
5.1.2. Gastos varios
Corresponden a los costos de los bienes no durables que se consumieron en el transcurso del desarrollo del proyecto, tales como energía eléctrica, insumos de computación y oficina, movilidad, y servicio de internet y correo electrónico.
En cuanto al costo de energía eléctrica, el consumo de una PC e iluminación artificial necesarias se calcula en 250 Wh. La tarifa de la empresa proveedora del servicio eléctrico se encuentra en $ 0,19/KWh+IVA. Dado que el desarrollo del proyecto demandó 480 hs. de trabajo, el costo total en gasto de energía eléctrica es de $ 26,40.
Con respecto a los gastos en insumos de computación y oficina, estos comprenden fotocopias, resmas de papel y cartuchos de tinta para impresora.
Los gastos de movilidad se refieren a los pasajes en colectivo urbano necesarios para el traslado a la Facultad de Ingeniería y Ciencias Hídricas (ubicada en la Ciudad Universitaria) para reuniones con el Director, a razón de dos pasajes por semana.
El cálculo del costo del servicio de internet se realiza según la conexión telefónica a la empresa proveedora de la conexión 0610, correspondiente al Plan 50 horas de Telecom. Este servicio provee de acceso a internet a cualquier hora del día por un máximo de 50 horas mensuales, al valor de $ 14,67+IVA.
El detalle de todos los factores correspondientes a gastos varios se muestra en la Tabla 5.2.

68
Tabla 5.2: Cálculo de costos correspondientes a gastos varios.
Rubro Descripción Cantidad Precio unitario Subtotal
Energía eléctrica Consumo de la PC e iluminación 120 KW $ 0,22 $ 26,40
Fotocopias 350 $ 0,04 $ 14,00
Resmas de papel 1 $ 10,00 $ 10,00
Blanco y negro 1 $70,00
Insumos de
computación y
oficina Cartuchos de tinta
para impresora Color 1 $ 90,00 $ 160,00
Movilidad Transporte urbano a la FICH 48 pasajes $ 0,90 $ 43,20
Comunicaciones Servicio de internet y correo electrónico 6 meses $17,75 $106,50
Total $ 360,10
Se muestra además en el Gráfico 5.2 los porcentajes de costos para cada uno de los factores involucrados en los gastos varios.
Gráfico 5.2: Porcentajes de costos correspondientes a gastos varios.
Porcentajes de costos correspondientes a gastos varios
Energía eléctrica7%
Fotocopias4%
Resmas de papel3%
Servicio de internet y correo electrónico
30%
Transporte urbano a la FICH
12%
Cartuchos de tinta para impresora
44%
5.1.3. Bienes de capital
Los bienes de capital utilizados en el proyecto se dividen en costos de equipamiento y de software. El valor de los mismos se detalla en los dos apartados siguientes.

69
5.1.3.1. Costos de equipamiento
El presente trabajo se llevó a cabo utilizando una PC Intel Pentium III de 550 MHz, con 64 Mb. de RAM DIMM y un disco rígido de 10 Gb. Fue necesario realizar la actualización de la misma a una PC Intel Celeron de 2 GHz con 256 Mb. RAM DDR y un disco rígido de 40 Gb debido a la complejidad computacional de los algoritmos implementados. El detalle de los costos de inversión en equipos, así como la vida útil de los mismos y su depreciación al finalizar el proyecto se detalla en la Tabla 5.3.
Tabla 5.3: Cálculo de costos correspondientes a equipamiento.
Descripción Vida útil Costos parciales PC Pentium III 550 MHz, 64 Mb RAM DIMM, disco rígido 10 Gb $ 300,00
Actualización a: Pentium Celeron 2 GHz., 256 Mb RAM DDR, disco rígido 40 Gb
$ 750,00
Costo por depreciación transcurridos 6 meses $ 75,00
Subtotal
5 años
$ 825,00
Monitor SVGA color $ 150,00
Costo por depreciación transcurridos 6 meses $ 25,00
Subtotal
3 años
$ 175,00
CD-ROM 36X $ 60,00
Costo por depreciación transcurridos 6 meses $ 15,00
Subtotal
2 años
$ 75,00
Impresora HP DeskJet 693 C $ 100,00
Costo por depreciación transcurridos 6 meses $ 25,00
Subtotal
2 años
$ 125,00
Modem 56K $ 60,00
Costo por depreciación transcurridos 6 meses $ 6,00
Subtotal
5 años
$ 66,00
Total $ 1566,00
5.1.3.2. Costos de licencias de software
Los costos referentes a este rubro corresponden al pago de las licencias del software aplicativo y de base utilizados en este trabajo. El detalle de los mismos se puede observar en la Tabla 5.4.
Finalmente se muestra en la Tabla 5.5 un resumen del costo total de bienes de capital. Mediante un gráfico circular se puede ver la comparación en porcentaje de ambos factores, tal como se presenta en el Gráfico 5.3.

70
Tabla 5.4: Cálculo de costos correspondientes a licencias de software.
Descripción Vida útil Costos parciales Software de base
Microsoft Windows 98 $ 116,00
Costo por depreciación transcurridos 6 meses $ 29,00
Subtotal
2 años
$ 145,00
MatLab 6.1 $ 1806,00
Costo por depreciación transcurridos 6 meses $ 301,00
Subtotal
3 años
$ 2107,00
Image Processing Toolbox $ 725,00
Costo por depreciación transcurridos 6 meses $ 121,00
Subtotal
3 años
$ 846,00
Software aplicativo
Microsoft Office 2000 $ 600,00
Costo por depreciación transcurridos 6 meses $ 150,00
Subtotal
2 años
$ 750,00
Total $ 3848,00
Tabla 5.5: Cálculo de costos correspondientes a bienes de capital.
Descripción Costos parciales Costos de equipamiento $ 1566,00 Costos de licencias de software $ 3848,00
Total $ 5414,00
Gráfico 5.3: Porcentajes de costos correspondientes a bienes de capital.
Porcentajes de costos correspondientes a bienes de capital
Equipamiento29%
Software71%

71
La comparación de los costos correspondientes a los tres factores analizados se puede observar en la Tabla 5.6 y el Gráfico 5.4.
Tabla 5.6: Análisis de costos a precio de mercado.
Descripción Costos parciales Recursos humanos $ 6240,00 Gastos varios $ 360,10 Bienes de capital $ 5414,00
Total $ 12014,10
Gráfico 5.4: Porcentajes de costos a precio de mercado.
Porcentajes de costos a precio de mercado
Recursos humanos
52%
Gastos varios3%
Bienes de capital45%
5 .2 . Cos t os de des ar r ol lo por un es t udiant e univer s i t ar io
Los costos descriptos en las secciones anteriores toman en consideración el caso de que el proyecto hubiera sido llevado a cabo por un ingeniero novel. Sin embargo, en el caso real se trata de un estudiante universitario que realiza el trabajo como Proyecto Final de su carrera de Ingeniería, no percibiendo remuneración. Esto produce una modificación en los costos correspondientes a recursos humanos, resultando según muestra la Tabla 5.7.

72
Tabla 5.7: Cálculo de costos correspondientes a recursos humanos.
Descripción Meses Horas por semana Total de horas Costo por hora Total parcial
Honorarios del
Director 6 4 96 $ 15,00 $ 1440,00
Total $ 1440,00
De esta manera los costos parciales se alteran según se muestra en la Tabla 5.8 y el Gráfico 5.5.
Tabla 5.8: Análisis de costos a precio de mercado.
Descripción Costos parciales Recursos humanos $ 1440,00 Gastos varios $ 360,10 Bienes de capital $ 5414,00
Total $ 7214,10
Gráfico 5.5: Porcentajes de costos a precio de mercado.
Porcentajes de costos a precio de mercado
Recursos humanos
20%Gastos varios
5%
Bienes de capital75%
Finalmente en el Gráfico 5.6 se muestra una comparativa de los costos a precio de mercado según si el proyecto es realizado por un ingeniero novel o un estudiante universitario avanzado. Los demás costos se mantienen invariantes en esta situación.

73
Gráfico 5.6: Costos analizados para la realización del proyecto.
$12.014,10
$7.214,10
0
2000
4000
6000
8000
10000
12000
14000
Pesos
Proyecto desarrollado por uningeniero novel
Proyecto desarrollado por unestudiante avanzado
Comparativa de costos analizados para la realización del proyecto

74
Capít u lo 6 . Conclus iones
n este trabajo se diseñó e implementó un sistema para registro y fusión de imágenes con aplicaciones a cortes 2D de imágenes médicas tridimensionales
multimodalidad (CT y MR), asumiendo que la parte que se representa del cuerpo humano (en este caso, el cráneo) puede ser tratada como un cuerpo rígido.
La técnica de registro implementada, basada en información mutua, provee de un método automático eficaz que alcanza muy buenos niveles de precisión.
La técnica de algoritmos genéticos fue utilizada para el proceso de optimización de la transformación de registro. La convergencia, en la mayoría de los casos, alcanza las cercanías del óptimo buscado rápidamente, pero sin embargo es lenta a la hora de determinar con mayor precisión la localización del mismo.
También se debe destacar que el preprocesamiento realizado sobre las imágenes a registrar (filtrado de suavizado y reescalado en intensidad) constituye una etapa fundamental dentro del proceso, ya que su acción sobre la función de costo permite por un lado acelerar la convergencia hacia valores óptimos y, por otro, proveer de un resultado más exacto.
El registro y la fusión se aplicaron satisfactoriamente a simulaciones de computadora y a imágenes médicas de casos clínicos reales, obteniendo en todos los experimentos muy buenos resultados en la visualización y comparación espacio-temporal de las imágenes.
Este trabajo, lejos de constituir la finalización de un proyecto, abre las puertas para investigaciones futuras más profundas. Como primera medida surge la necesidad de extender su aplicación de transformaciones rígidas a transformaciones afines, introduciendo parámetros adicionales en la optimización correspondientes a las escalas y corte en los ejes x e y. Esto permitiría obtener resultados más adecuados en el registro de imágenes intersujeto, o en la utilización de un atlas.
El lenguaje de programación utilizado, por otra parte, constituye una herramienta excelente para la investigación y la experimentación a escala de laboratorio. Sin embargo, por no tratarse de un lenguaje compilado, los tiempos de ejecución son altos. Resultaría muy interesante realizar la implementación en un lenguaje compilado, tal como C, C++, Delphi, entre otras opciones, para mejorar el tiempo de procesamiento.
La incorporación de un análisis multiresolución para realizar el registro es de gran importancia y necesidad. De esta manera se provee de una mejora sustancial al método, permitiendo disminuir el tiempo de búsqueda de los parámetros óptimos.
Debido a la lenta convergencia que poseen los métodos estocásticos de búsqueda global en la vecindad del óptimo, el uso de los algoritmos genéticos podría ser combinado con métodos determinísticos que aumenten la velocidad de convergencia y garanticen la optimización global. El estudio de estos métodos aplicados al caso particular de la función de costo de información mutua constituye otro aspecto muy interesante para analizar.
E

75
La teoría de conjuntos borrosos ha sido también aplicada en forma satisfactoria por investigadores para el registro de imágenes médicas. Es una posibilidad muy importante a tener en cuenta y vale la pena profundizar en su estudio.
Otra importante línea de investigación la constituye la comparación del rendimiento y precisión alcanzadas por una técnica basada en similaridad de vóxeles como la utilizada en el presente trabajo, que demuestra ser muy robusta, frente a otra técnica como las que usan segmentación y correspondencias entre superficies. El marcado de puntos fiduciarios sobre imágenes ya adquiridas tiene la desventaja del tiempo que demanda la identificación de los puntos a considerar en el registro, así como también el error cometido en el señalamiento de los mismos. Sin embargo, es un método directo que no involucra procesos de optimización.
Finalmente, se puede concluir que el registro y fusión de imágenes es una poderosa herramienta con múltiples potencialidades, la mayoría de las cuales aún se encuentran en un estado incipiente. Su aplicabilidad es tan amplia que desde un gran número de disciplinas se impulsa su desarrollo e investigación. Desde este trabajo, orientado a las aplicaciones médicas, se exploró solamente una pequeña porción del largo camino que la ciencia aún debe recorrer. El alcance de los objetivos generales y específicos planteados en un comienzo fue posible gracias al desarrollo de un proyecto interdisciplinario que busca brindar servicios a la comunidad científica, y por su intermedio, a toda la sociedad.

76
R ef er encias
[1] R. C. González, R. E. Woods. “Digital Image Processing”, Segunda Edición. Editorial Prentice Hall. 2002.
[2] J. Hajnal, D. Hawkes, D. Hill, “Medical Image Registration”, ed. J. Hajnal, D. Hawkes, D. Hill , Capítulo 1. 2000.
[3] C. Benito. “Aplicaciones clínicas de las imágenes médicas digitales”. Sección de Neurorradiología, Hospital General Universitario Gregorio Marañón de Madrid. En apphys.uned.es/actividades/no_reglada/imagen_medica/aplicaciones_clinicas.pdf, material didáctico del curso “Experto Profesional en Imagen Médica Digital” dictado en la Universidad Nacional de Educación a Distancia, España. 2002.
[4] T.F. Cootes, C.J. Taylor, D.H. Cooper, J. Graham, “Training Models of S hape from Sets of British Machine Vision Conference 1992” (D. Hogg and R. Boyle eds.), pp. 9 -18. London: Springer. 1992.
[5] D. Rueckert, L.I. Sonoda, C. Hayes, D.L.G. Hill, M.O. Leach, D.J. Hawkes, “Non -rigid Registration using Free-Form Deformations: Application to Breast MR Images.” IEEE Transactions in Medical Imaging, vol. 18, no.8, pp. 712-721. 1999.
[6] L. Porcher Nedel, I. Harb Manssour, C. M. Dal Sasso Freitas, “Computer Graphics & Medicine”. Sibgrapi’99 - International Symposium On Computer Graphics, Image Processing And Vision, Campinas. Instituto de Informática Universidad Federal de Rio Grande do Sul (UFRGS). 1999.
[7] D. Hill, P. Batchelor, “Registration Methodology: Concepts and Algorithms”. En Medical Image Registration (ed. J. Hajnal, D. Hawkes, D. Hill ), Capítulo 3. 2000.
[8] D. Hawkes. “Registration Methodology – Introduction”. En Medical Image Registration (ed. J. Hajnal, D. Hawkes, D. Hill ), Capítulo 2. 2000.
[9] M. E. Gómez, A. Valdez, R. Isoardi, P. Ariza. “Registro de imágenes ce rebrales de TAC y PET”. Gabinete de Tecnología Médica, Facultad de Ingeniería, San Juan, Argentina. 2003.
[10] Y-T. Chen, M-S. Wang. “Three -dimensional reconstruction and fusion for multi-modality spinal images”. Department of Engineering Science, National Cheng Kung University, Tainan, Taiwan, ROC. 2003.
[11] B. Zitová, J. Flusser, “Image registration methods: a survey”, Image and Vision Computing 21, pp. 977–1000. 2003.

77
[12] C. E. Shannon, “The mathematical theory of communication (parts 1 and 2),” Bell S yst. Tech. J., vol. 27, pp. 379–423 y 623–656, 1948. Reimpresión disponible en http://www.lucent.com.
[13] A. Collignon, F. Maes, D. Delaere, D. Vandermeulen, P. Suetens, y G. Marchal, “Automated multi -modality image registration based on information theory,” en Information Processing in Medical Imaging 1995 (Y. Bizais, C. Barillot, y R. Di Paola, eds.), pp. 263-274, Dordrecht, The Netherlands: Kluwer Academic. 1995.
[14] F. Maes, A. Collignon, D. Vandermeulen, G. Marchal, y P. Suetens, “Multimodality image registration by maximization of mutual information,” IEEE Trans. Med. Imaging, vol. 16, pp. 187–198. 1997.
[15] P. A. Viola, “Alignment by maximization of mutual information”. Tesis PhD, Massachusetts Institute of Technology. 1995.
[16] W. M.Wells III, P. Viola, and R. Kikinis, “Multi -modal volume registration by maximization of mutual information”. En Medical Robotics and Computer Assisted Surgery. pp. 55–62, New York: Wiley,. 1995
[17] J.P.W. Pluim, J.B.A. Maintz, M.A. Viergever. “Mutual -information-based registration of medical images: a survey”. IEEE Trans. on medical imaging, vol 22, nº 8, pp. 45–52. 2003.
[18] R. He, P. A. Narayana. “Global optimization of mutual information: application to three - dimensional retrospective registration of magnetic resonance images”. Departamento de Radiología, Universidad de Texas de la Escuela Médica de Houston, Houston, Texas, Estados Unidos. 2002.
[19] J. Hajnal, “Preparation and display of image data”. En Medical Image Registration (ed. J. Hajnal, D. Hawkes, D. Hill ), Capítulo 4. 2000.
[20] D. Milone, “Algoritmos genéticos – Introducción teórica”. Material de estudio de la cátedra Inteligencia Computacional. Facultad de Ingeniería y Ciencias Hídricas, Universidad Nacional del Litoral. 2002.
[21] A. Gómez Gómez, J. Parreño Fernández, I. Fernández Quesada, “Aplicaciones de los algoritmos genéticos en la industria”, Escuela Técnica Superior de Ingenieros Industriales de Gijón, Universidad de Oviedo. 2002.
[22] T. Bäck, U. Hammel, H-P Schewfel, “Evolutionary Computation: Com ments on History and Current State,” IEEE Trans. on Evolutionary Computation, vol. 1, no. 1, apr. 1997.
[23] D. Hill, J. Jarosz, “Registration of MR and CT images for clinical applications”. King’s College, Londres, Reino Unido. En Medical Image Registration (ed. J. Hajnal, D. Hawkes, D. Hill), Capítulo 10. 2000.
[24] R. Kowalewski, J. Kesselring. “25 years after CO poisoning”. Swiss Medical Weekly, 1998; 128:467, SMW und Infomed-Verlags AG. http://www.smw.ch/oeil/1998/128-12-332-98.html