Oferta y demanda. Elasticidad. Elasticidad-precio de la demanda ...

CAPÍTULO 4
ESTUDIO MACROMECANICO DE
UNA LÁMINA.
TENSIONES Y DEFORMACIONES

58
4.1. INTRODUCCIÓN
Una lámina de material compuesto es esencialmente, un material anisótropo al que se le pueden aplicar las ecuaciones de la elasticidad considerando esa circunstancia.
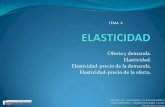
Antes de proseguir conviene aclarar un poco la notación que se empleará. Las componentes del tensor de tensiones se han dibujado en la Figura 4.1 actuando sobre una porción cúbica del material. Respecto a la nomenclatura, muchos autores utilizan el símbolo σ cuando se refieren a tensiones normales (tensiones actuando ortogonalmente a la cara considerada) y τ cuando se trata de las tensiones tangenciales (tensiones actuando tangencialmente a la cara considerada). Otros, sin embargo, utilizan siempre la letra griega sigma cuando se refieren a cualquier tipo de tensión; en este caso la distinción entre tensiones normales y tangenciales se puede deducir de los subíndices que aparecen: un subíndice repetido indica tensión normal mientras que, cuando aparecen dos subíndices distintos, se refieren a tensiones tangenciales. También otros autores que utilizan la primera nomenclatura, en lugar de escribir las tensiones normales repitiendo el subíndice sólo lo ponen una vez; es decir, en vez de σxx escriben σx. Otros autores utilizan la notación σij, donde i y j son subíndices que varían entre 1 y 3. Sea cual sea la notación inicialmente utilizada aquí se empleará una notación contractada que se indicará posteriormente.
El tensor de tensiones se podrá expresar como sigue:
[ ] [ ]ij
zz
yzyy
xzxyxx
z
yzy
xzxyx
.sim.simT σσ
σσσσσσ
στσττσ
==⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
≈
[4.1]
Sus componentes se pueden expresar de formas distintas, tal como se ha dicho, recogiéndose a continuación las expresiones más usuales:

59
Subíndices normales representados por letras xyzxyzzzyyxx σσσσσσ
Subíndices normales representados por letras xyzxyzzy τττσσσ x Subíndices normales numéricos 123123332211 σσσσσσ Subíndices contractados numéricos 654321 σσσσσσ Subíndices contractados representados por
letras
srqzyx σσσσσσ
Figura 4.1.
La notación más usual que se empleará a lo largo de este texto es la de subíndices contractados numéricos.
Cuando se analice el problema de una lámina cargada en su plano, las componentes del tensor de tensiones σ3, σ4 y σ5 tomarán valores nulos. σ1 representará la tensión en la dirección 1 (no equivocar, en este caso, con la dirección de las fibras), σ2 en una dirección ortogonal a la anterior contenida en el plano de la lámina y σ6 representará la tensión de cizalladura. Para una mayor claridad se incluye la Figura 4.1 en la que estas componentes tensionales aparecen dibujadas.
Figura 4.2.

60
Para finalizar, en todo lo que se refiere a estados tensionales, son válidas las construcciones gráficas de Mohr; en especial el círculo de Mohr para estados tensionales bidimensionales que se describe en el Anexo A de estos apuntes.
En lo referente al tensor de deformaciones, la nomenclatura es similar a la empleada para las tensiones. Una primera distinción que conviene dejar clara es la diferencia entre las componentes del tensor de deformaciones, relativas a cortadura, y las deformaciones angulares ingenieriles, definiéndose ambas a continuación:
xv
yu
xv
yu
xyxy
xy ∂∂
∂∂γ
∂∂
∂∂γ
ε +=⎟⎟⎠
⎞⎜⎜⎝
⎛+==
21
2
ingenieril tensorial
angular nDeformacióangular nDeformació
[4.2]
donde u y v son las componentes de desplazamiento según las direcciones x e y respectivamente. El tensor de deformaciones puede, entonces, expresarse como:
[ ] [ ]ij
zz
yzyy
xzxyxx
z
yzy
xzxyx
.sim.sim///
D εεεεεεεε
εγεγγε
==⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
≈222
[4.3]
Subíndices normales representados por letras
xyzxyzzzyyxx εεεεεε
Subíndices normales representados por letras 222
xyzxyzzyx
γγγεεε
Subíndices normales numéricos 123123332211 εεεεεε Subíndices contractados numéricos 222 654321 /// εεεεεε Subíndices contractados representados por letras
222 /// sutzyx εεεεεε
La notación que más se utilizará en estos apuntes es la de subíndices contractados numéricos. Nótese que ε4, ε5 y ε6 representan las deformaciones angulares ingenieriles γyz, γzx y γxy, respectivamente. Esto

61
ofrece una serie de ventajas, como posteriormente se verá, al establecer las ecuaciones constitutivas de la lámina.
4.2. PLANTEAMIENTO DEL PROBLEMA ELASTICO ANISOTROPO
Al igual que en cualquier otro problema elástico, el planteamiento de un problema con un material anisótropo puede enunciarse como sigue: determinar el tensor de tensiones [T], el tensor de deformaciones [D] y los desplazamientos ( kwjviu
rrrr++=δ ) en todos los puntos del sólido
conociendo las solicitaciones actuantes (fuerzas de masa, de superficie, puntuales, desplazamientos impuestos, variación de temperatura, etc.).
Para resolver este problema se dispone de los siguientes sistemas de ecuaciones:
- Relativas a las componentes del tensor de tensiones.
Ecuaciones de equilibrio interno:
0
0
0
=+++
=+++
=+++
zz
yyz
xxzZ
zyz
yy
xxyY
zxz
yxy
xxX
∂∂σ
∂
∂τ
∂∂τ
∂
∂τ
∂
∂σ
∂
∂τ
∂∂τ
∂
∂τ
∂∂σ
[4.4]
donde X, Y y Z representan las componentes de la fuerza internas por unidad de volumen que actúa dentro del sólido.
Ecuaciones de equilibrio en el contorno:
nzmyzlxzZ
nyzmylxyY
nxzmxylxX
σττ
τστ
ττσ
++=
++=
++=
[4.5]

62
donde X , Y y Z representan las tensiones actuando sobre el contorno del cuerpo según las direcciones x, y y z, y (l,m,n) son las componentes del vector normal a la superficie.
- Relativas a las componentes del tensor de deformación.
Ecuaciones de compatibilidad:
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
−+=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
+−=
⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
++−=
zxy
yxz
xyz
zyxz
zxy
yxz
xyz
yxzy
zxy
yxz
xyz
xzyx
∂
∂γ
∂∂γ
∂
∂γ
∂∂
∂∂ε∂
∂
∂γ
∂∂γ
∂
∂γ
∂∂
∂∂
ε∂
∂
∂γ
∂∂γ
∂
∂γ
∂∂
∂∂ε∂
22
22
22
[4.6]
2
2
2
22
2
2
2
22
2
2
2
22
yx
x
yyxxy
xz
zx
xzzx
z
y
yz
zyyz
∂
ε∂
∂
ε∂
∂∂
γ∂
∂
ε∂
∂
ε∂∂∂γ∂
∂
ε∂
∂
ε∂∂∂
γ∂
+=
+=
+=
[4.7]
- De la relación entre componentes de los tensores de tensiones y de deformación.
Ecuaciones constitutivas:
c.1) Si el material presentara un comportamiento elástico e isótropo, son aplicables las Leyes de Hooke Generalizadas:

63
)yx(EE
zz
)zx(EE
yy
)zy(EE
xx
σσνσε
σσνσε
σσνσε
+−=
+−=
+−=
[4.8]
G/yzyz
G/zxzx
G/xyxy
τγ
τγ
τγ
=
=
=
ó las Ecuaciones de Lamé:
zGvez
yGvey
xGvex
ελσ
ελσ
ελσ
2
2
2
+=
+=
+=
[4.9]
zyGzy
zxGzx
xyGxy
γτ
γτ
γτ
=
=
=
c.2) Si el material presentara un comportamiento elástico pero anisótropo, las ecuaciones constitutivas cambian volviéndose algo más complicadas. Para un material anisótropo, la ecuación constitutiva será de la forma:
{ } [ ]{ } 321 ,,m,k,j,icóC kmijkmij === εσεσ
[4.10]
donde el tensor [C] es de cuarto orden. Si se desarrollara la ecuación anterior, por ejemplo, para expresar τ12 en función de las componentes del tensor de deformación, se obtendría:

64
6665654643632621616
6
5
11212211212
3112311213
2312321223
321232311231211221
231223131213121212
33123322122211121112
2
2
2
+
+
εεεεεεσ
ε
ε
εε
ε
ε
εεε
εεε
εεετ
cccccc
/
/
/)cc(
)cc(
)cc(
ccc
ccc
ccc
+++++=
↓
↓+
↓+⇓
+⇓
⇓
+++
+++
+++=
[4.11]
Como se observa en la última expresión, si se empleara para las deformaciones la notación contractada numérica, se podría obtener la siguiente relación constitutiva:
σ1
σ2
σ3
σ4
σ5
σ6
⎧
⎨
⎪ ⎪
⎩
⎪ ⎪
⎫
⎬
⎪ ⎪
⎭
⎪ ⎪
=
c11 c12 c13 c14 c15 c16
c21 c22 c23 c24 c25 c26
c31 c32 c33 c34 c35 c36
c41 c42 c43 c44 c45 c46
c51 c52 c53 c54 c55 c56
c61 c62 c63 c64 c65 c66
⎡
⎣
⎢ ⎢ ⎢ ⎢ ⎢
⎤
⎦
⎥ ⎥ ⎥ ⎥ ⎥
ε1
ε2
ε3
ε4
ε5
ε6
⎧
⎨
⎪ ⎪
⎩
⎪ ⎪
⎫
⎬
⎪ ⎪
⎭
⎪ ⎪
Figura 4.3. Ecuación constitutiva empleando la notación contractada numérica.

65
Nótese que, utilizando la notación contractada, la ecuación constitutiva adquiere una forma mucho más manejable: el tensor de cuarto orden [C] ha quedado reducido a uno de segundo orden y, los tensores de tensión y deformación, que eran tensores de segundo orden, han quedado reducidos a tensores de orden 1 o, más simplemente, vectores. Esta nueva matriz contractada [C] se denomina matriz de rigidez.
Operando de manera análoga, se podrían expresar las deformaciones en función de las tensiones de la forma siguiente:
{ } [ ]{ } 321 ,,,m,k,j,isóS kmijkmij === σεσε
[4.12]
expresión que, desarrollada, proporciona las siguientes ecuaciones:
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
211221121212131213311231
32123223122333123322122211121112
211121121112131113311131
32113223112333113322112211111111
⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
++++
+++++=
++++
+++++=
σσσσ
σσσσσε
σσσσ
σσσσσε
ssss
sssss
.
.
ssss
sssss
[4.13]
Utilizando la notación contractada, las ecuaciones anteriores podrían escribirse:

66
⎪⎪⎪⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪⎪⎪⎪
⎬
⎫
++
+++=
++
+++=
666565
4643632621616
616515
4143132121111
. . . . . . . . . . . . . . . . . . . . . . . .
. . . . . . . . . . . . . . . . . . . . . . . .
σσ
σσσσε
σσ
σσσσε
ss
ssss
ss
ssss
[4.14]
Identificando [3.13] con (3.14) se comprueba que:
. . . . . .4s4s
2s . . . . . .2s2s
. . . . . .ss
233145222344
121161 113115 112314
112212 111111
,s,s
s,s,s
,s,s
==
===
==
[4.15]
La matriz [S] cuyas componentes son sij recibe el nombre de matriz de flexibilidad.
Así pues, la relación constitutiva general para un material anisótropo puede ponerse como:
{ } [ ]{ } 6 . . 21 ,,j,icóC jiji === εσεσ
[4.16]
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
6
5
4
3
2
1
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
cccccc
cccccc
cccccc
cccccc
cccccc
cccccc
[4.17]
siendo la matriz [C] simétrica, lo que conduce a que el material tendría 21 constantes elásticas independientes entre sí.

67
4.3. ECUACIONES CONSTITUTIVAS PARA DIFERENTES TIPOS DE MATERIALES
Si se analizase las posibles simetrías materiales, el número de constantes independientes del material comienza a reducirse a medida que aumenta la simetría del material.
4.3.1 SIMETRÍA MONOCLÍNICA
Supóngase que el plano 1-2 (x,y) es de simetría en lo relativo a las propiedades del material: todas las constantes asociadas con el eje 3 (z>0) deben ser las mismas que las asociadas con el eje 3 (sentido negativo) (z<0). En estas condiciones 4ε y 5ε estarían relacionadas con
4σ y 5σ , y yzε y xzε lo estarían con yzσ y y xzσ . La ecuación constitutiva de un material con simetría monoclínica sería:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
66636261
5554
4544
36333231
26232221
16131211
6
5
4
3
2
1
00
0000
0000
00
00
00
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
cccc
cc
cc
cccc
cccc
cccc
[4.18]
El número de constantes de la matriz [C] distintas de cero resultaría ser de 20, de las cuales sólo 13 serían independientes entre sí. La matriz [S] sería en este caso:
[ ]
00
0000
0000
00
00
00
66636261
5554
4544
36333231
26232221
16131211
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
SSSS
SS
SS
SSSS
SSSS
SSSS
S [4.19]

68
Expresando las componentes de la matriz de flexibilidad en función de las constantes elásticas del material:
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−−
−−
−−
=
63
63
2
62
1
61
54
54
5
45
4
6
36
32
32
1
31
6
26
3
23
21
21
6
16
3
13
2
12
1
1 0 0
0 1 0 0 0
0 10 0 0
0 0 1
0 0 1
0 0 1
EEEE
EE
EE
EEEE
EEEE
EEEE
S
ννν
ν
ν
ννν
ννν
ννν
[4.20]
4.3.2 SIMETRÍA ORTÓTROPA
Si se aumenta el grado de simetría del material, se llega a lo que se conoce como simetría ortótropa, en la que el material presenta los planos 1-2, 2-3 y 3-1, como planos de simetría. En estas condiciones, la ecuación constitutiva sería:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
66
55
44
333231
232221
131211
6
5
4
3
2
1
00000
00000
00000
000
000
000
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
c
c
c
ccc
ccc
ccc
[4.21]
que presenta 12 constantes distintas no nulas de las cuales sólo existen 9 independientes entre sí. La matriz de flexibilidad en este caso sería:

69
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
=
66
55
44
333231
232221
131211
00000
00000
00000
000
000
000
S
S
S
SSS
SSS
SSS
S [4.22]
Expresando la matriz [S] en función de las constantes elásticas del material:
[ ]
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
ν−
ν−
ν−
ν−
ν−
ν−
=
6
5
4
32
32
1
31
3
23
21
21
3
13
2
12
1
E10 0 0 0 0
0 E10 0 0 0
0 0 E10 0 0
0 0 0 E1
EE
0 0 0 EE
1 E
0 0 0 EEE
1
S [4.23]
Las componentes de la matriz de rigidez también se puede expresar en función de las constantes elásticas:

70
( )( )( )( ) ( )( ) ( )( ) ( )
11 23 32 1
22 31 13 2
33 21 12 3
12 12 13 32 1 21 23 31 2
13 13 12 23 1 31 32 21 3
23 23 21 13 2 32 31 12 3
44 23 4
55 31 5
66 12 6
1
1
1
c vE
c vE
c vE
c vE vE
c vE vE
c vE vE
c G E
c G E
c G E
=
=
=
= =
= =
= =
= =
= =
= =
− ν ν
− ν ν
− ν ν
ν + ν ν ν + ν ν
ν + ν ν ν + ν ν
ν + ν ν ν + ν ν [4.24]
donde
( )321321311323322112 211 ννννννννν −−−−= /v
4.3.3 SIMETRÍA TRANSVERSALMENTE ISÓTROPA
Si el plano 2-3 fuera isótropo la ecuación constitutiva correspondiente podría expresarse como:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
66
66
2322
223221
232221
121211
6
5
4
3
2
1
00 000
00 000
002
000
000
000
000
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
c
c
)cc(
ccc
ccc
ccc
[4.25]
o bien como:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−⋅=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
66
66
2322
223221
232221
121211
6
5
4
3
2
1
00 000
00 000
002000
000
000
000
σ
σ
σ
σ
σ
σ
ε
ε
ε
ε
ε
ε
S
S
)SS(
SSS
SSS
SSS
[4.26]

71
en la que, el número de constantes distintas de cero es igual a 12. De éstas sólo hay 5 independientes entre sí. En este caso las componentes de la matriz de rigidez son:
( )( )
( ) ( )( )( )
211 23 1
22 33 21 12 2
12 13 21 23 2 12 23 1
23 23 21 12 2
44 23 21 12 2
55 66 12 6
/2
1
1
1 1
1 2
c vE
c c vE
c c vE vE
c vE
c vE
c c G E
=
= =
= = =
=
=
= = =
− ν
− ν ν
ν + ν ν + ν
ν + ν ν
− ν − ν ν [4.27]
donde
( )( )12212323 2111 νννν −−+= /v
4.3.4 SIMETRÍA ISÓTROPA
Si el material presentara un comportamiento isótropo, su ecuación constitutiva sería:
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
−=
⎪⎪⎪⎪⎪
⎭
⎪⎪⎪⎪⎪
⎬
⎫
⎪⎪⎪⎪⎪
⎩
⎪⎪⎪⎪⎪
⎨
⎧
6
5
4
3
2
1
1211
1211
1211
112121
121121
121211
6
5
4
3
2
1
2 0 0 000
02
0 000
00 2
000
00 0
00 0
00 0
ε
ε
ε
ε
ε
ε
σ
σ
σ
σ
σ
σ
)cc(
)cc(
)cc(
ccc
ccc
ccc
[4.28]
siendo el número de constantes independientes igual a dos.
( )
)(/EGccc
Eccc
VEccc
V
ν
ν
ν
+====
===
=== −
12665544
231312
332211 1
[4.29]
donde

72
( )( )νν 2111 −+= /V
En este caso la matriz de flexibilidad se reduce a:
[ ]
2 0 0 000
020 000
00 2000
00 0
00 0
00 0
1211
1211
1211
112121
121121
121211
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−⋅
−⋅
−⋅=
)SS(
)SS(
)SS(
SSS
SSS
SSS
S[4.30]
que coincide con la ecuación [4.8], considerando que:
( ) ( )GE
SS
ES
ES
1122
1
1211
12
11
=+⋅
=−⋅
−=
=
ν
ν
[4.31]
4.4. RELACION TENSION DEFORMACION PARA UNA LÁMINA
4.4.1 PRIMER EJE EN DIRECCIÓN DE LAS FIBRAS
Un sólido como el representado en la Figura 4.4, en el que sus bases son paralelas al plano 1-2, cuya altura (dimensión según la dirección 3) toma un valor muy pequeño en comparación con sus dimensiones características de sus bases, y sometido a un sistemas de fuerzas, todas ellas también paralelas al plano 1-2, se encuentra en un estado tensional denominado estado de tensión plana.

73
Figura 4.4.
El estado tensional en cualquier punto del interior del sólido se puede expresar del siguiente modo:
0 0
0 0
54543
6321621
==
≠≠
εεσσσ
εεεεσσσ
[4.32]
La ecuación constitutiva puede escribirse como:
{ } [ ]{ } 621 ,...,,j,isóS jiji === σεσε
[4.33]
La deformación ε3, a su vez, puede obtenerse como:
6362321313 σσσε sss ++=
[4.34]
y la ecuación que liga tensiones con deformaciones puede establecerse como:
{ } [ ]{ } 621 ,..,,j,icóC jiji === εσεσ
[4.35]
que, una vez desarrollada, proporciona el siguiente sistema de ecuaciones:

74
6663632621616
54
6363332321313
6263232221212
6163132121111
0
0
εεεεσ
σσ
εεεεσ
εεεεσ
εεεεσ
cccc
cccc
cccc
cccc
+++=
==
=+++=
+++=
+++=
[4.36]
Eliminando σ3 de todas las ecuaciones anteriores se obtiene la relación:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
6
2
1
333231
232221
131211
3
2
1
ε
ε
ε
σ
σ
σ
QQQ
QQQ
QQQ
[4.37]
en la que la matriz 3333 c/cccQ jiijij −= recibe el nombre de matriz de rigidez en tensión plana.
Si el material presentara un comportamiento ortótropo, con ejes de simetría en las direcciones 1 y 2, la matriz de rigidez anterior se reduciría a:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
6
2
1
66
2212
1211
6
2
1
0 0
0
0
ε
ε
ε
σ
σ
σ
Q
[4.38]
donde las componentes son:
( )( ) ( )
( )
61266
2112222
2112112211222112
2112111
1
11
1
EGQ
/EQ
/E/EQ
/EQ
==
−=
−=−=
−=
νν
νννννν
νν
[4.39]
Sí E1=E2 se dice que existe simetría cuadrada y, en este caso:
( )
( )ν
ν
ν
+≠=
=
−==
12
1Q
666
1112
22211
/EEQ
/EQ
[4.40]

75
Utilizando la equivalencia:
12
º021
º02
0ºy1
0ºx EE νννν ==== yxEE
[4.41]
las expresiones anteriores pueden ponerse como:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
γ
ε
ε
τ
σ
σ
0 0
0
0
y
x
ss
yyxy
xyxx
y
x
Q
[4.42]
( ) ( )xxyyyxxy
yxyyyyxxxx
QQQ
EQEQ
⋅=⋅=
⋅−=⋅−=º0º0
º0º0º0º0º0º0 1/1/
νν
νννν
[4.43]
Si el material fuera isótropo:
( ) ( ))1(2/
1/1/ 22
ν
ννν
+⋅==
−⋅=−==
EGQ
EQEQQ
ss
xyyyxx
[4.44]
4.4.2 EN EJES GENERALES
Hasta ahora, se ha encontrado la relación entre deformaciones y tensiones o, lo que es equivalente, entre tensiones y deformaciones, suponiendo que la tensión σ1 actuaba en la dirección de las fibras. En otras palabras, se ha estudiado en profundidad el caso representado en la figura 4.4. Pero ¿qué sucede cuando se tiene una situación como la representada en la Figura 4.5? ¿Cómo se pueden expresar las tensiones
'' ,, 621 σσσ ′ en función de las correspondientes deformaciones '' ,, 621 εεε ′ o viceversa?
{ } [ ] { }εσ ⋅= Q

76
Figura 4.5.
Este problema puede resolverse de la siguiente manera utilizando la matriz de cambio de coordenadas [T] que se definirá más adelante. Supóngase que las dirección 1 es la dirección de las fibras y que se desea establecer la relación entre las tensiones y deformaciones según otras direcciones (representadas con primas en el dibujo) que forman una ángulo θ con las anteriores, tal como se representa en la Figura 4.6.
Figura 4.6.
Las nuevas relaciones tensión-deformación ó deformación-tensión pueden escribirse por medio de la matriz de transformación [T].
Para la tensión

77
{ } [ ]{ }
{ } [ ] { }σσ
σσ
′=
=′
1-T
T
[4.45]
Donde:
{ }σ es la tensión expresada en los ejes 12 (ejes materiales)
{ }'σ es la tensión expresada en los ejes 1’2’ (o más comúnmente ejes xy) (ejes globales)
y para la deformación:
{ } [ ]{ }
{ } [ ] { }εε
εε
1-T
T
T
T
=′
′=
[4.46]
En este caso:
{ }ε es la tensión expresada en los ejes 12 (ejes materiales)
{ }'ε es la tensión expresada en los ejes 1’2’ (o más comúnmente ejes x-y) (ejes globales)
Las diferencias entre la ecuación [4.45] y la [4.46] responde a que la matriz de transformación se debe aplicar sobre el tensor de deformaciones, tal como muestran las ecuaciones [4.47] y [4.48].
[ ]
⎪⎪
⎭
⎪⎪
⎬
⎫
⎪⎪
⎩
⎪⎪
⎨
⎧
=⎪⎭
⎪⎬⎫
⎪⎩
⎪⎨⎧
2
2
62
16
21εεε
εεε T,,
'''
[4.47]

78
{ } [ ]
{ } [ ]
{ } [ ] { }εε
εεε
εεε
εεε
εεε
T
2100010001
200010001
1-
6
2
11T
621
6
2
1
621
T
'''
'''
T
,,
T,,
=′
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
⋅⋅⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
−
[4.48]
La matriz de transformación se puede expresar como:
[ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−+
+=22
22
22
nmmnmn2mnm n 2mn - n m
T [4.49]
[ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+
+
=−
22
22
22
1
nmmnmn- 2mn- m n 2mnn m
T [4.50]
[ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+−
+
=22
22
22
nm mn2mn2mn- m n
mn n m TT
[4.51]
[ ]
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−+
+
−
=−
22
22
22
1
nmmn 2- 2mn mn m n
mnn m TT
[4.52]
A continuación se particularizan las matrices [T] para diferentes ángulos:

79
[ ] [ ]
[ ] [ ]
[ ] [ ]
[ ] [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+=
°−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
+
+=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−++=
°=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
°=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
°=
−−−
−
−
−
0 1 1- 5.0- 5.05.0
5.0 5.05.0
0 5.05.0- 1- 5.0 5.0 1 5.0 5.0
45
0 1- 15.0- 5.05.0
5.0 5.05.0
0 5.05.015.05.0 1- 5.05.0
45
1000 010 10
1000 010 10
90
100010001
100010001
0
)45(1)45(
)45(1)45(
)90(1)90(
)0(1)0(
T
T
T
T
TT
TT
TT
TT
θ
θ
θ
θ
La ecuación constitutiva en los ejes 12 será:
{ } [ ]{ }
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
γεε
τσσ
εεε
σσσ
εσ
2
1
2212
1211
2
1
6
2
1
2212
1211
6
2
1
0000
0000
SS
SS
QQQQQ
QQQQQQ
[4.53]
A partir de las ecuaciones [4.45], [4.46], [4.53], la ecuación constitutiva se puede expresar como:
{ } [ ] [ ][ ] { }'Q ' 1-1 εσ
−= TTT
{ } { }''
_εσ ⎥⎦
⎤⎢⎣⎡= Q
[4.54]

80
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
6
2
1
6
2
1
'''
'''
εεε
σσσ
sssysx
ysyyyx
xsxyxx
QQQQQQQQQ
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
γεε
τσσ
y
x
sssysx
ysyyyx
xsxyxx
y
x
QQQQQQQQQ
En forma desarrollada la matriz constitutiva de la lámina en unos ejes que forman un ángulo θ con la dirección de las fibras es:
)cos(senQcossen)QQQQ(Q
cossen)QQQ(cossen)QQQ(Q
cossen)QQQ(cossen)QQQ(Q
cosQcossen)QQ(senQQ
)cos(senQcossen)QQQ(Q
senQcossen)QQ(cosQQ
ssssxyyyxxss
ssyyxyssxyxxys
ssyyxyssxyxxxs
yyssxyxxyy
xyssyyxxyx
yyssxyxxxx
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
4422
33
33
4224
4422
4224
22
22
22
22
4
22
++−−+=
+−+−−=
+−+−−=
+++=
++−+=
+++=
[4.55]
De manera análoga se puede definir la matriz de flexibilidad que relacionará las deformaciones con la tensiones. En unos ejes que coincidan con la dirección de las fibras su expresión será:
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
6
2
1
66
2212
1211
6
2
1
0 0
0
0
σ
σ
σ
ε
ε
ε
S
SS
SS
[4.56]
donde las componentes son:

81
1
21
2
1212
1266
222
111
1
1
1
EES
GS
ES
ES
νν−=−=
=
=
=
[4.57]
La matriz de flexibilidad en unos ejes que forman un ángulo θ con la dirección de las fibras se puede estimar también con la matriz de transformación [T], en este caso su valor es:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
τσσ
γεε
y
x
sssysx
ysyyyx
xsxyxx
y
x
SSSSSSSSS
[4.58]
Y en forma desarrollada:
)cos(senScossen)SSSS(S
cossen)SSS(cossen)QSS(S
cossen)SSS(cossen)SSS(S
cosScossen)SS(senSS
)cos(senScossen)SSS(S
senScossen)SS(cosSS
ssssxyyyxxss
ssyyxyssxyxxys
ssxyyyssxyxxxs
yyssxyxxyy
xyssyyxxyx
yyssxyxxxx
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
4422
33
33
4224
4422
4224
4222
22222
2222
2
2
++−−+=
−+−−−−=
−−−−−=
+++=
++−+=
++⋅+=
[4.59]
Por analogía entre la ecuación [4.57] y la [4.59] se pueden definir unas constantes elásticas aparentes de la lámina.

82
yy
xyxy
xx
xyyx
ssxy
yyy
xxx
S
S
S
S
SG
SE
SE
−−=
−−=
=
=
=
ν
ν
1
1
1
[4.60]
cuyos valores son
θθθν
θ 4
2
22
1
21
12
4
1
12111 senE
cossenEG
cosEE x
⋅+⋅⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅−+⋅=
[4.61]
θθθν
θ 4
2
22
1
21
12
4
1
12111 cosE
cossenEG
senEEy
⋅+⋅⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅−+⋅=
[4.62]
( )θθθθν 44
12
22
1
21
1221
1412221 cossenG
cossenEGEEGxy
+⋅+⋅⋅⎟⎟⎠
⎞⎜⎜⎝
⎛ ⋅+−+⋅=
[4.63]
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−+⋅⋅= θθθθ
νν 22
1221
44
1
21 111 cossenGEE
cossenE
E xyx [4.64]
( )⎥⎥⎦
⎤
⎢⎢⎣
⎡⋅⋅⎟⎟
⎠
⎞⎜⎜⎝
⎛−+−+⋅⋅= θθθθ
νν 22
1221
44
1
21 111 cossenGEE
cossenE
Eyxy [4.65]

83
4.5. INVARIANTES DE UNA LÁMINA ORTOTROPA
La matriz de rigidez en ejes globales de una lámina ortótropa se ha mostrado en las ecuaciones [4.55] y [4.56]. Se podría demostrar, con más o menos trabajo analítico, que, las ecuaciones anteriores se pueden rescribir de la manera siguiente:
θ
θθ
θθ
θθ
θ
θθ
4
4221
4221
42
4
42
3566
3226
3216
32122
3412
32111
cosUUQ
senUsenUQ
senUsenUQ
cosUcosUUQ
cosUUQ
cosUcosUUQ
−=
+−=
−−=
+−=
−=
++=
[4.66]
donde:
842
846
842
2
84233
661222115
661222114
661222113
22112
661222111
QQQQU
QQQQU
QQQQU
QQU
QQQQU
+−+=
−++=
−−+=
−=
+++=
[4.67]
Así, los nuevos elementos ( ijQ ) de la matriz de rigidez se pueden expresar en función de unos invariantes ( iU ), que son independientes de la orientación de la lámina, afectados, o no, por funciones trigonométricas del ángulo θ de orientación de la lámina. Por ejemplo, el término Q 11 de la nueva matriz de rigidez puede ponerse como:

84
θθ 42 32111 cosUcosUUQ ++=
[4.68]
Es decir, dicho término se puede expresar como suma de una cantidad constante, e independiente de la orientación de la lámina ( 1U ), más otros sumandos que dependen de θ y que pueden ser negativos pero que, en valor absoluto, su contribución al valor de 11Q es inferior a la del sumando 1U . Lo anterior se representa, esquemáticamente, en el croquis siguiente:
Figura 4.7.
A partir de los invariantes anteriores se pueden definir, para el material ortótropo, unas constantes cuasi-isótropas que corresponden a un límite inferior de las rigideces del material y que se utilizan, en la práctica, para tener la certeza de que, sea cual sea el ángulo de orientación de las tensiones, el comportamiento de la lámina es, como mínimo, igual al de la lámina cuasi-isótropa.
Llamando 24
21=D UU − , se pueden definir las siguientes constantes
cuasi-isótropas:

85
( )
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
=
=
⎟⎠⎞
⎜⎝⎛ −=−==
5
14
211
24
211
iso 1E
UG
U/U
UU/)UU(U/D
iso
iso
iso
ν
ν
[4.69]
4.6. RESUMEN
En este apartado se resumen las principales relaciones mostradas en este capítulo. En ejes locales:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢
⎣
⎡
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
τσσν
ν
γεε
τσσν
ν
γεε
y
xyx
x
y
y
x
y
x
G
EE
EE
G
EE
EE
12
2
1
12
21
21
2
12
1
2
1
100
01
01
100
01
01

86
{ } [ ]{ }σε S=
Relación deformación-tensión: { } [ ]{ }σε S=
12SS1121211212
2112
222
2112
111
2
1
SS
2221
1211
2
1
GQ QQQ
1EQ
1EQ
Q000QQ0QQ
=ν=ν=
νν−=
νν−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
γεε
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
τσσ
En ejes globales:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
γεε
τσσ
y
x
sssysx
ysyyyx
xsxyxx
y
x
QQQQQQQQQ
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
τσσ
γεε
y
x
sssysx
ysyyyx
xsxyxx
y
x
SSSSSSSSS

87
)cos(senQcossen)QQQQ(Q
cossen)QQQ(cossen)QQQ(Q
cossen)QQQ(cossen)QQQ(Q
cosQcossen)QQ(senQQ
)cos(senQcossen)QQQ(Q
senQcossen)QQ(cosQQ
ssssxyyyxxss
ssyyxyssxyxxys
ssyyxyssxyxxxs
yyssxyxxyy
xyssyyxxyx
yyssxyxxxx
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
4422
33
33
4224
4422
4224
22
22
22
22
4
22
++−−+=
+−+−−=
+−+−−=
+++=
++−+=
+++=
)cos(senScossen)SSSS(S
cossen)SSS(cossen)QSS(S
cossen)SSS(cossen)SSS(S
cosScossen)SS(senSS
)cos(senScossen)SSS(S
senScossen)SS(cosSS
ssssxyyyxxss
ssyyxyssxyxxys
ssxyyyssxyxxxs
yyssxyxxyy
xyssyyxxyx
yyssxyxxxx
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
θθθθ
4422
33
33
4224
4422
4224
4222
22222
2222
2
2
++−−+=
−+−−−−=
−−−−−=
+++=
++−+=
++⋅+=



![ELASTICIDAD EN LA DEMANDA Concepto / ELASTICIDAD · PDF fileELASTICIDAD EN LA DEMANDA Concepto / ELASTICIDAD EN LA – OFERTA – Concepto / ELASTICIDAD CRUZADA – Concepto [E]l término](https://static.fdocuments.mx/doc/165x107/5a7a60b47f8b9a01528d9a59/elasticidad-en-la-demanda-concepto-elasticidad-en-la-demanda-concepto-elasticidad.jpg)













