
Enseñanza de la Tecnología - …ecaths1.s3.amazonaws.com/ensenanzadelatecnologia/Maquina.y... ·...
19
2009 María Beatriz Fuentes U.C.C. 04/09/2009 Enseñanza de la Tecnología Máquinas y Mecanismos
Transcript of Enseñanza de la Tecnología - …ecaths1.s3.amazonaws.com/ensenanzadelatecnologia/Maquina.y... ·...
2009
María Beatriz Fuentes
U.C.C.
04/09/2009
Enseñanza de la Tecnología Máquinas y Mecanismos

MAQUINAS
Definición: Artificio del hombre para dirigir, aprovechar
o regular la acción o el sentido de una fuerza.
Las máquinas forman parte de la vida del ser humano desde que
tenemos memoria, cuando hablamos de máquinas no estamos
hablando sólo de las excavadoras industriales, de las básculas de
camiones, de las fundidoras de metal o de las bombas de calor.
Cuando hablamos de máquinas, estamos hablando también de
máquinas de café, de cortadoras de césped, de computadoras, de
máquinas de coser, de artefactos simples.
Pero si buscamos una definición de máquina en un diccionario,
encontramos, en líneas generales, que la misma se considera un
conjunto de objetos o elementos que a la vez se pueden denominar
piezas (inmóviles o móviles). Dichas piezas son capaces de
transformar la energía a través de la interacción de las mismas.
Descripción: máquinas simples y máquinas complejas.
También se denomina máquina a aquel dispositivo que nos da la
posibilidad de modificar la dirección y magnitud de la aplicación
de una fuerza. Estamos hablando aquí de las máquinas simples, es
necesario aclarar que en el mundo de las máquinas encontramos dos
divisiones, las simples y las complejas. Los ejemplos de máquinas
simples son: poleas, ruedas, la palanca, etc. Utilizando dichas
máquinas de forma correcta podemos obtener una fuerza mucho
mayor que la que un ser humano podría aplicar o tener sólo con la
fuerza de su musculatura. A partir del hallazgo o creación de estas
máquinas simples y sus combinaciones, surgieron entonces las de tipo
complejas.
Las máquinas complejas están compuestas por diferentes
elementos, entre los más importantes tenemos el motor, el cual
funciona como una fuente que extrae energía, ésta última se
necesitará para realizar el trabajo deseado. Es relevante señalar que el
motor por sí mismo puede ser considerado una máquina, en este caso
posee el objetivo de transformar energía (puede ser eléctrica, química,
cinética, etc.) en energía mecánica. Luego tenemos el mecanismo,
éste es considerado como todos los factores mecánicos en conjunto,
dentro de ellos, los móviles serán los que están destinados a lograr el
efecto que necesitamos de la máquina, estos se conocen
como “efecto útil”, transformará la energía que proviene del motor.
MAQUINAS SIMPLES: EL USO DE LA FUERZA
Definición: Tipo de maquina que requiere solamente la aplicación
de una fuerza para funcionar.
Las máquinas simples: ¿Cuales son y que
características tienen?
Cuando hablamos de máquinas se nos vienen a la cabeza miles de
pensamientos a los cuales relacionamos con máquinas de café,
máquinas de musculación, máquinas industriales, etc. Pero las
máquinas son mucho más complejas y las hay de todo tipo; dentro del
mundo de las máquinas encontramos divisiones que se dan a partir de
aplicaciones, dentro de estas divisiones tenemos el rubro de las
máquinas simples.
Las máquinas se conocen como un conjunto de
mecanismos que son capaces de transformar una
fuerza aplicada en otra saliente, habiendo
modificado previamente la dirección o sentido, la
magnitud de la fuerza o una combinación de ellas.
Las máquinas simples cumplen con lo que se
denomina conservación de energía; ésta última
no se crea ni se destruye, simplemente se
transforma. En física se dice que la fuerza por el espacio aplicado, lo
que se denomina trabajo aplicado, debe ser igual a la fuerza por el
espacio resultante, que se conoce como trabajo resultante.
Una definición muy común de máquina simple es “un artefacto que no
crea ni destruye el trabajo mecánico, sino que tiene como fin
transformar algunas de sus características”.
Definición y funcionamiento de la máquina
simple
Es fundamental que se aclare en la definición, que no se debe
confundir a una máquina simple con componentes de máquinas, o
piezas para éstas, ni con sistemas de regulación o control de otra
fuente de energía. Las máquinas simples transforman fuerzas
aplicadas o potencias, en otra resistencia o fuerza saliente, esto de
acuerdo al principio de conservación de la energía.
Las máquinas simples que conocemos hoy en día, se encuentran
formadas por ciertos mecanismos que son sin rozamiento, esto quiere
decir que no pierden energía por el efecto del rozamiento.
Éstas son máquinas teóricas que nos ayudan a establecer la relación
entre la fuerza aplicada, su dirección y sentido, su desplazamiento, y
la fuerza resultante, también aquí, su desplazamiento, sentido y
dirección.
Tipos de máquinas simples tradicionales
Las máquinas simples básicas son dos, la palanca y el plano inclinado
de estas derivan las otras, de la palanca deriva la rueda y de esta la
polea y el torno; del plano inclinado derivan la cuña y el tornillo.
Las máquinas simples permiten disminuir el esfuerzo para realizar un
trabajo, pero toda disminución de la fuerza necesaria para realizar un
trabajo va acompañada por un aumento recíproco de la distancia que
recorre el punto de aplicación de la fuerza.
Palanca
Una palanca es una máquina simple formada por una barra rígida que
puede girar alrededor de un punto de apoyo.
Hay varios tipos de palancas, pero en todas ellas hay un punto donde
se coloca el cuerpo que se quiere mover, llamaremos a ese
cuerpo carga o resistencia, y otro punto donde se aplicará la fuerza
para mover a la carga, a esa fuerza la llamaremos potencia.
A las distancias entre el punto de apoyo y los puntos de aplicación de
carga y potencia se les llama brazo.
En el esquema siguiente, el balde que se intenta levantar es la carga,
la fuerza ejercida por la persona es la potencia. A las distancias entre
el punto de apoyo y la carga se les llama brazo de carga, y entre el
punto de apoyo y donde aplicamos la fuerza las llamaremos brazos de
potencia
Máquinas Simples
Palanca
Rueda
Polea Torno
Plano inclinado
Cuña Tornillo

La finalidad de una palanca es conseguir mover una carga grande a
partir de una fuerza o potencia muy pequeña.
Tipos de palancas
De acuerdo con la posición de la potencia y de la resistencia con
respecto al punto de apoyo, se consideran tres clases de
palancas, que son:
De primer género: El punto de apoyo está entre la carga y el punto
de aplicación de la potencia, por ejemplo el sube y baja, las tenazas,
las tijeras.
De segundo género: La carga está entre el punto de apoyo y la
fuerza, por ejemplo una carretilla, un cascanueces.
De tercer género: El punto de aplicación de la fuerza está entre el
punto de apoyo y la carga, por ejemplo unas pinzas de depilar, una
escoba, una pala de obra. En este caso el brazo de palanca de la carga
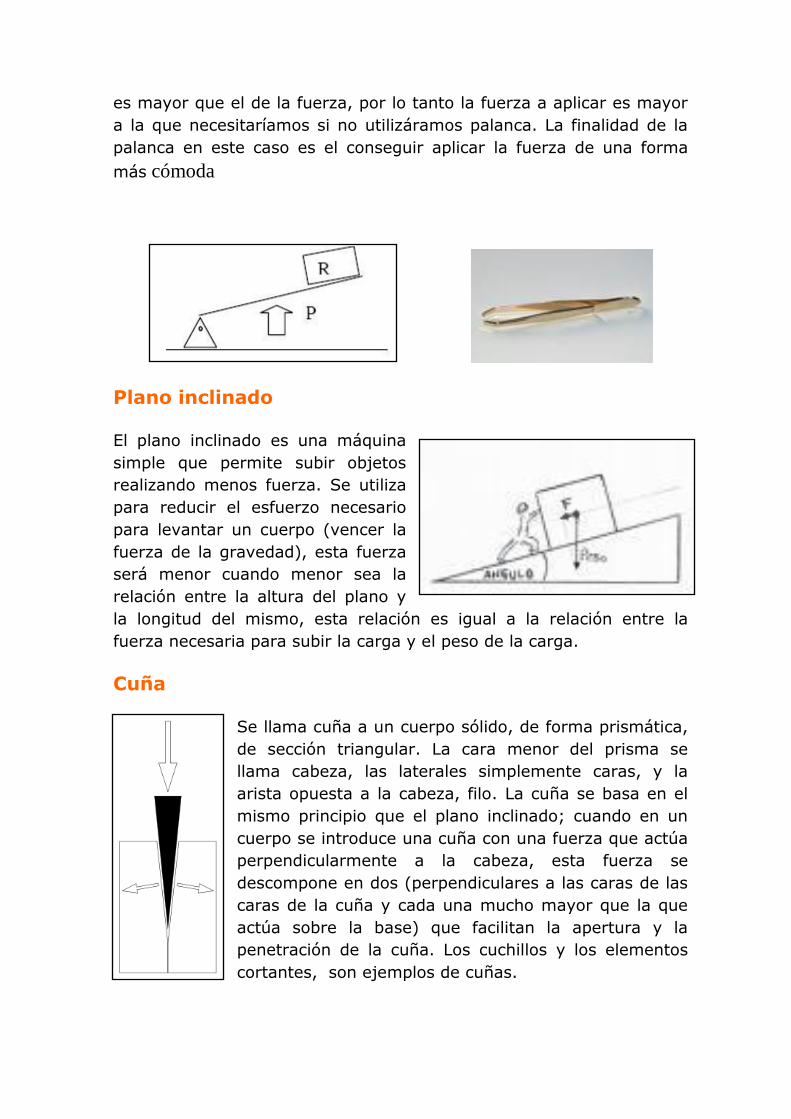
es mayor que el de la fuerza, por lo tanto la fuerza a aplicar es mayor
a la que necesitaríamos si no utilizáramos palanca. La finalidad de la
palanca en este caso es el conseguir aplicar la fuerza de una forma
más cómoda
Plano inclinado
El plano inclinado es una máquina
simple que permite subir objetos
realizando menos fuerza. Se utiliza
para reducir el esfuerzo necesario
para levantar un cuerpo (vencer la
fuerza de la gravedad), esta fuerza
será menor cuando menor sea la
relación entre la altura del plano y
la longitud del mismo, esta relación es igual a la relación entre la
fuerza necesaria para subir la carga y el peso de la carga.
Cuña
Se llama cuña a un cuerpo sólido, de forma prismática,
de sección triangular. La cara menor del prisma se
llama cabeza, las laterales simplemente caras, y la
arista opuesta a la cabeza, filo. La cuña se basa en el
mismo principio que el plano inclinado; cuando en un
cuerpo se introduce una cuña con una fuerza que actúa
perpendicularmente a la cabeza, esta fuerza se
descompone en dos (perpendiculares a las caras de las
caras de la cuña y cada una mucho mayor que la que
actúa sobre la base) que facilitan la apertura y la
penetración de la cuña. Los cuchillos y los elementos
cortantes, son ejemplos de cuñas.
Tornillo
El tornillo también deriva del plano inclinado. Ya
Arquímedes consideraba al tornillo como una
analogía circular del plano inclinado. Un triángulo de
papel enrollado alrededor de un cilindro marca la
rosca de un tornillo. La fuerza de avance del tornillo
es siempre mayor que la fuerza aplicada.
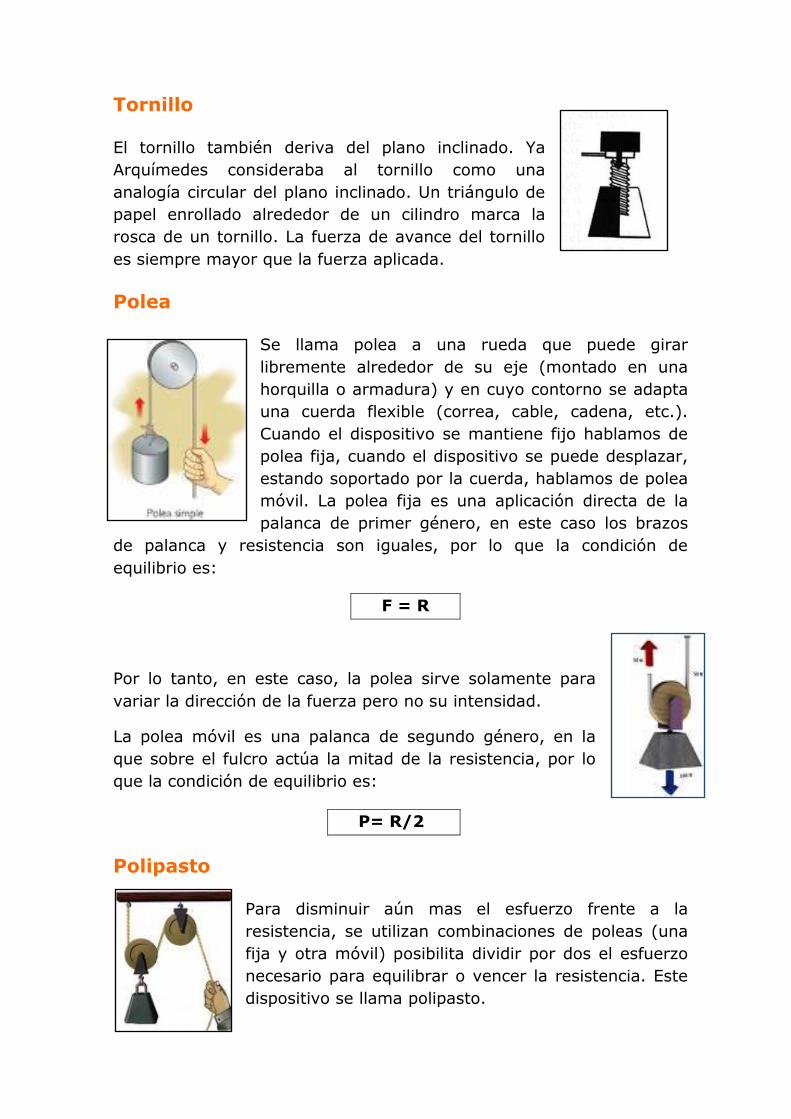
Polea
Se llama polea a una rueda que puede girar
libremente alrededor de su eje (montado en una
horquilla o armadura) y en cuyo contorno se adapta
una cuerda flexible (correa, cable, cadena, etc.).
Cuando el dispositivo se mantiene fijo hablamos de
polea fija, cuando el dispositivo se puede desplazar,
estando soportado por la cuerda, hablamos de polea
móvil. La polea fija es una aplicación directa de la
palanca de primer género, en este caso los brazos
de palanca y resistencia son iguales, por lo que la condición de
equilibrio es:
F = R
Por lo tanto, en este caso, la polea sirve solamente para
variar la dirección de la fuerza pero no su intensidad.
La polea móvil es una palanca de segundo género, en la
que sobre el fulcro actúa la mitad de la resistencia, por lo
que la condición de equilibrio es:
P= R/2
Polipasto
Para disminuir aún mas el esfuerzo frente a la
resistencia, se utilizan combinaciones de poleas (una
fija y otra móvil) posibilita dividir por dos el esfuerzo
necesario para equilibrar o vencer la resistencia. Este
dispositivo se llama polipasto.
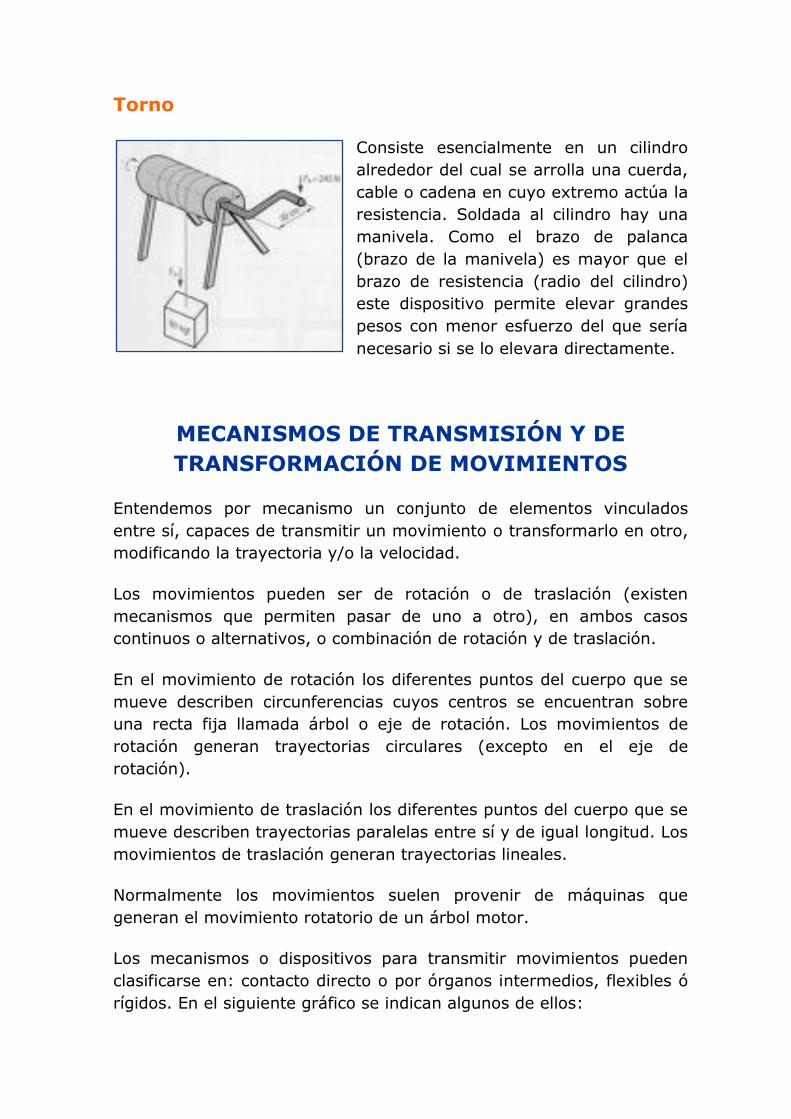
Torno
Consiste esencialmente en un cilindro
alrededor del cual se arrolla una cuerda,
cable o cadena en cuyo extremo actúa la
resistencia. Soldada al cilindro hay una
manivela. Como el brazo de palanca
(brazo de la manivela) es mayor que el
brazo de resistencia (radio del cilindro)
este dispositivo permite elevar grandes
pesos con menor esfuerzo del que sería
necesario si se lo elevara directamente.
MECANISMOS DE TRANSMISIÓN Y DE
TRANSFORMACIÓN DE MOVIMIENTOS
Entendemos por mecanismo un conjunto de elementos vinculados
entre sí, capaces de transmitir un movimiento o transformarlo en otro,
modificando la trayectoria y/o la velocidad.
Los movimientos pueden ser de rotación o de traslación (existen
mecanismos que permiten pasar de uno a otro), en ambos casos
continuos o alternativos, o combinación de rotación y de traslación.
En el movimiento de rotación los diferentes puntos del cuerpo que se
mueve describen circunferencias cuyos centros se encuentran sobre
una recta fija llamada árbol o eje de rotación. Los movimientos de
rotación generan trayectorias circulares (excepto en el eje de
rotación).
En el movimiento de traslación los diferentes puntos del cuerpo que se
mueve describen trayectorias paralelas entre sí y de igual longitud. Los
movimientos de traslación generan trayectorias lineales.
Normalmente los movimientos suelen provenir de máquinas que
generan el movimiento rotatorio de un árbol motor.
Los mecanismos o dispositivos para transmitir movimientos pueden
clasificarse en: contacto directo o por órganos intermedios, flexibles ó
rígidos. En el siguiente gráfico se indican algunos de ellos:
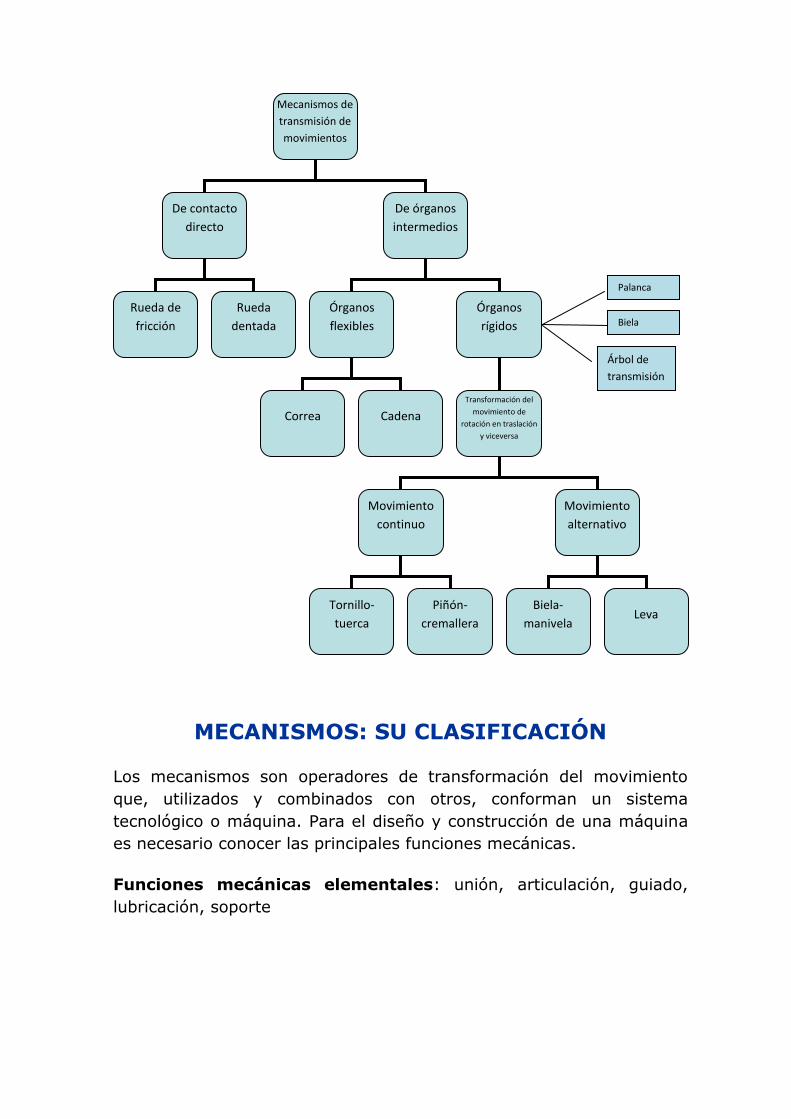
MECANISMOS: SU CLASIFICACIÓN
Los mecanismos son operadores de transformación del movimiento
que, utilizados y combinados con otros, conforman un sistema
tecnológico o máquina. Para el diseño y construcción de una máquina
es necesario conocer las principales funciones mecánicas.
Funciones mecánicas elementales: unión, articulación, guiado,
lubricación, soporte
Mecanismos de
transmisión de
movimientos
De contacto
directo
De órganos
intermedios
Rueda de
fricción
Rueda
dentada
Órganos
flexibles
Órganos
rígidos
Correa Cadena
Transformación del
movimiento de
rotación en traslación
y viceversa
Movimiento
continuo
Movimiento
alternativo
Tornillo-
tuerca
Piñón-
cremallera
Biela-
manivela Leva
Palanca
Biela
Árbol de
transmisión
Transmisión por contacto directo
Ruedas de Fricción
Las ruedas de fricción están formadas por dos ruedas, una motriz y
otra conducida, en contacto permanente. La transmisión del
movimiento se origina por el rozamiento entre éstas sin interponer
ningún elemento. Utilizadas para transmisión de ejes paralelos,
cruzados o que se corten. La relación de transmisión suele ser 6
aunque su máximo es 10, su potencia es baja y la velocidad tangencial
suele rondar los 20 m/s. Una gran ventaja es su bajo coste pero tiene
el inconveniente de ser muy ruidosas a grandes velocidades y su mal
comportamiento a efectos de choque. Las ruedas de fricción pueden
dividirse en varios tipos:
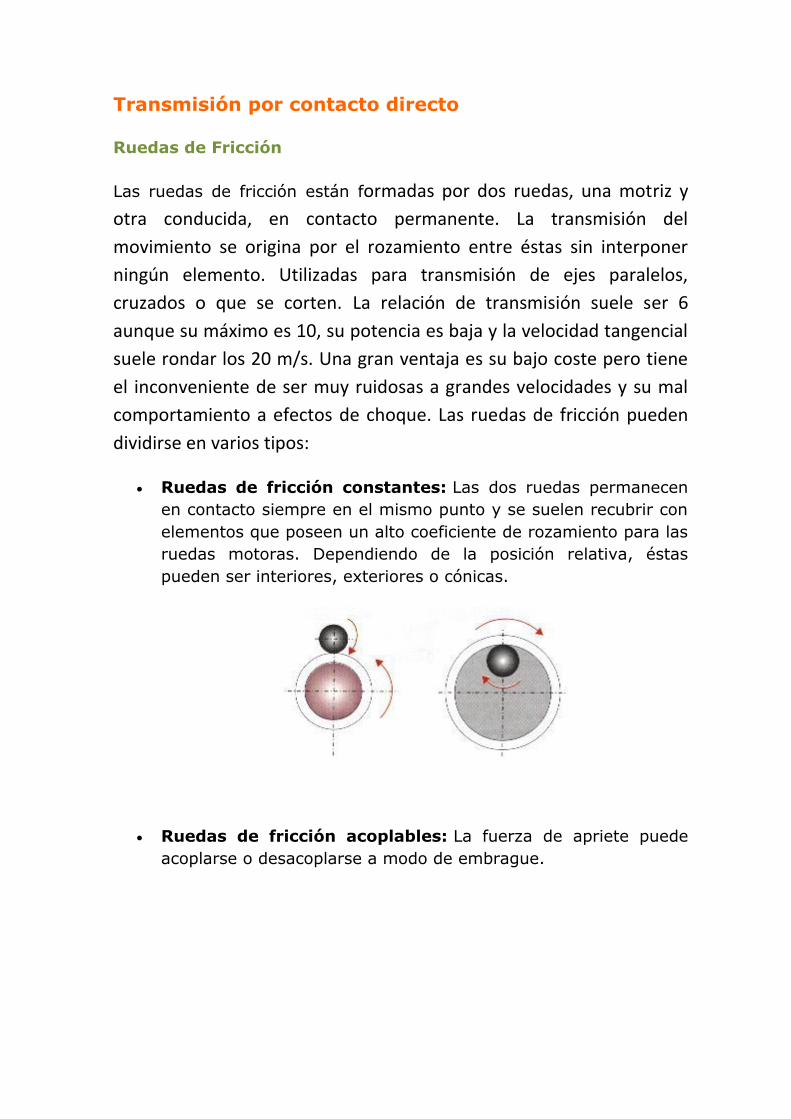
Ruedas de fricción constantes: Las dos ruedas permanecen
en contacto siempre en el mismo punto y se suelen recubrir con
elementos que poseen un alto coeficiente de rozamiento para las
ruedas motoras. Dependiendo de la posición relativa, éstas
pueden ser interiores, exteriores o cónicas.
Ruedas de fricción acoplables: La fuerza de apriete puede
acoplarse o desacoplarse a modo de embrague.

Ruedas de fricción regulables: Existen diferentes
disposiciones pero la más usada es la que la rueda motora se
puede deslizar, en contacto permanente, en dirección radial
sobre la rueda conducida, pudiendo variar la relación de
transmisión según se acerque o aleje del centro de giro de ésta.
Ruedas dentadas – engranajes
Con el objeto de evitar el deslizamiento,
además de reducir la presión entre las
ruedas, y poder transmitir potencias sin
limites y sin problemas de (deslizamiento),
se usan las ruedas dentadas o sea ruedas provistas, a intervalos
regulares, de vanos y salientes llamados dientes.
Las ruedas dentadas tienen múltiples aplicaciones y están presentes
en casi todas las máquinas mecánicas construidas por el hombre: son
fundamentales en mecanismos importantes del automóvil, como por
ejemplo la caja de cambios, el diferencial, etc.
Transmisión mediante órganos intermedios flexibles
Correas y cadenas
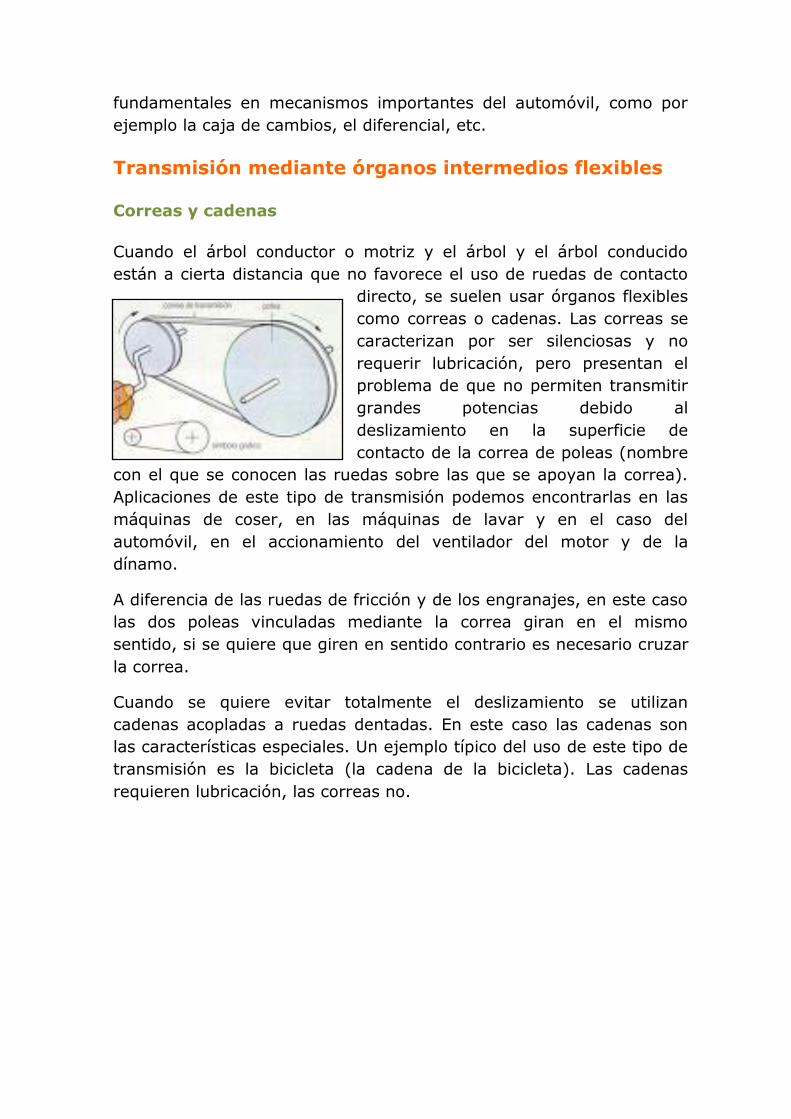
Cuando el árbol conductor o motriz y el árbol y el árbol conducido
están a cierta distancia que no favorece el uso de ruedas de contacto
directo, se suelen usar órganos flexibles
como correas o cadenas. Las correas se
caracterizan por ser silenciosas y no
requerir lubricación, pero presentan el
problema de que no permiten transmitir
grandes potencias debido al
deslizamiento en la superficie de
contacto de la correa de poleas (nombre
con el que se conocen las ruedas sobre las que se apoyan la correa).
Aplicaciones de este tipo de transmisión podemos encontrarlas en las
máquinas de coser, en las máquinas de lavar y en el caso del
automóvil, en el accionamiento del ventilador del motor y de la
dínamo.
A diferencia de las ruedas de fricción y de los engranajes, en este caso
las dos poleas vinculadas mediante la correa giran en el mismo
sentido, si se quiere que giren en sentido contrario es necesario cruzar
la correa.
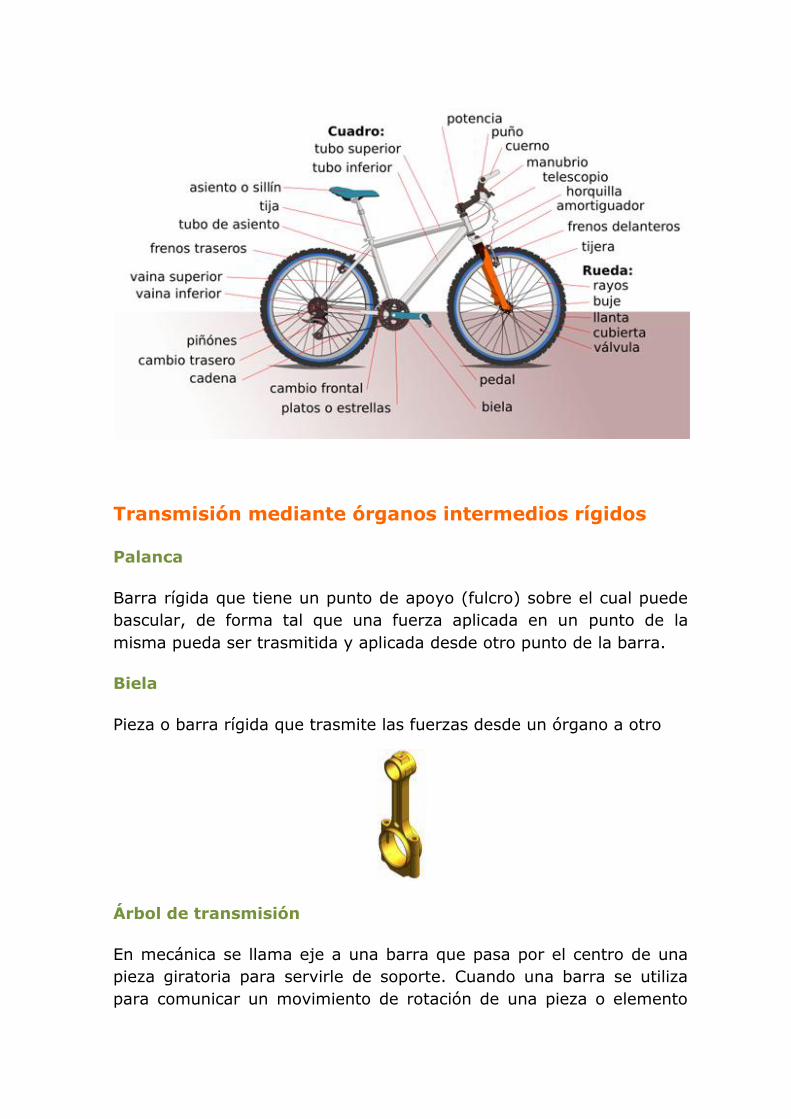
Cuando se quiere evitar totalmente el deslizamiento se utilizan
cadenas acopladas a ruedas dentadas. En este caso las cadenas son
las características especiales. Un ejemplo típico del uso de este tipo de
transmisión es la bicicleta (la cadena de la bicicleta). Las cadenas
requieren lubricación, las correas no.
Transmisión mediante órganos intermedios rígidos
Palanca
Barra rígida que tiene un punto de apoyo (fulcro) sobre el cual puede
bascular, de forma tal que una fuerza aplicada en un punto de la
misma pueda ser trasmitida y aplicada desde otro punto de la barra.
Biela
Pieza o barra rígida que trasmite las fuerzas desde un órgano a otro
Árbol de transmisión
En mecánica se llama eje a una barra que pasa por el centro de una
pieza giratoria para servirle de soporte. Cuando una barra se utiliza
para comunicar un movimiento de rotación de una pieza o elemento
mecánico a otra, aunque eventualmente también sirva de soporte, en
general, en vez de eje se llama árbol (ejemplo: el árbol de levas, el
árbol de transmisión de los automóviles, etc.)
MECANISMOS DE TRANSMISIÓN Y
TRANSFORMACIÓN DE MOVIMIENTOS
En muchos casos es necesario: transformar un movimiento de rotación
en otro de translación o viceversa; o transformar un movimiento de
rotación continuo en un movimiento de translación alternativo o
viceversa.
En el primer caso tenemos el tornillo común y la tuerca, el piñón y la
cremallera, etc. En el segundo caso tenemos la biela-manivela, la leva,
etc.
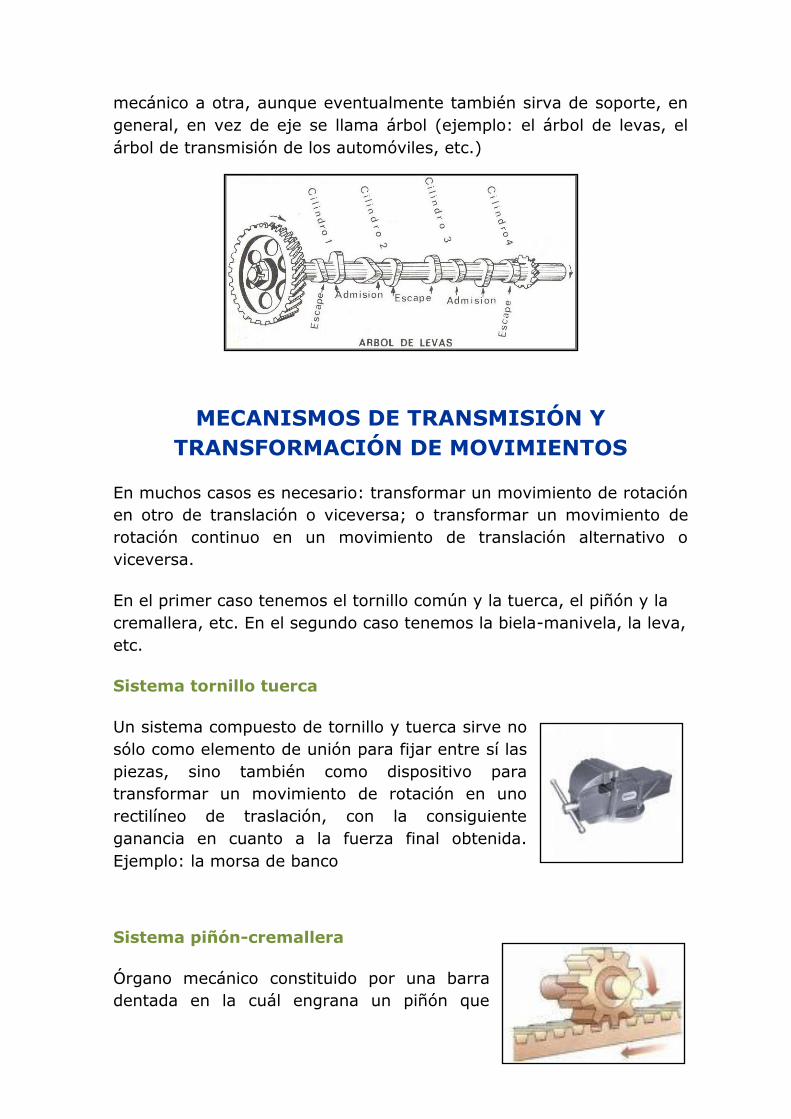
Sistema tornillo tuerca
Un sistema compuesto de tornillo y tuerca sirve no
sólo como elemento de unión para fijar entre sí las
piezas, sino también como dispositivo para
transformar un movimiento de rotación en uno
rectilíneo de traslación, con la consiguiente
ganancia en cuanto a la fuerza final obtenida.
Ejemplo: la morsa de banco
Sistema piñón-cremallera
Órgano mecánico constituido por una barra
dentada en la cuál engrana un piñón que
permite transformar un movimiento de rotación en uno de traslación y
viceversa (ejemplo: la cremallera de la dirección de un automóvil
asociada al volante del mismo)
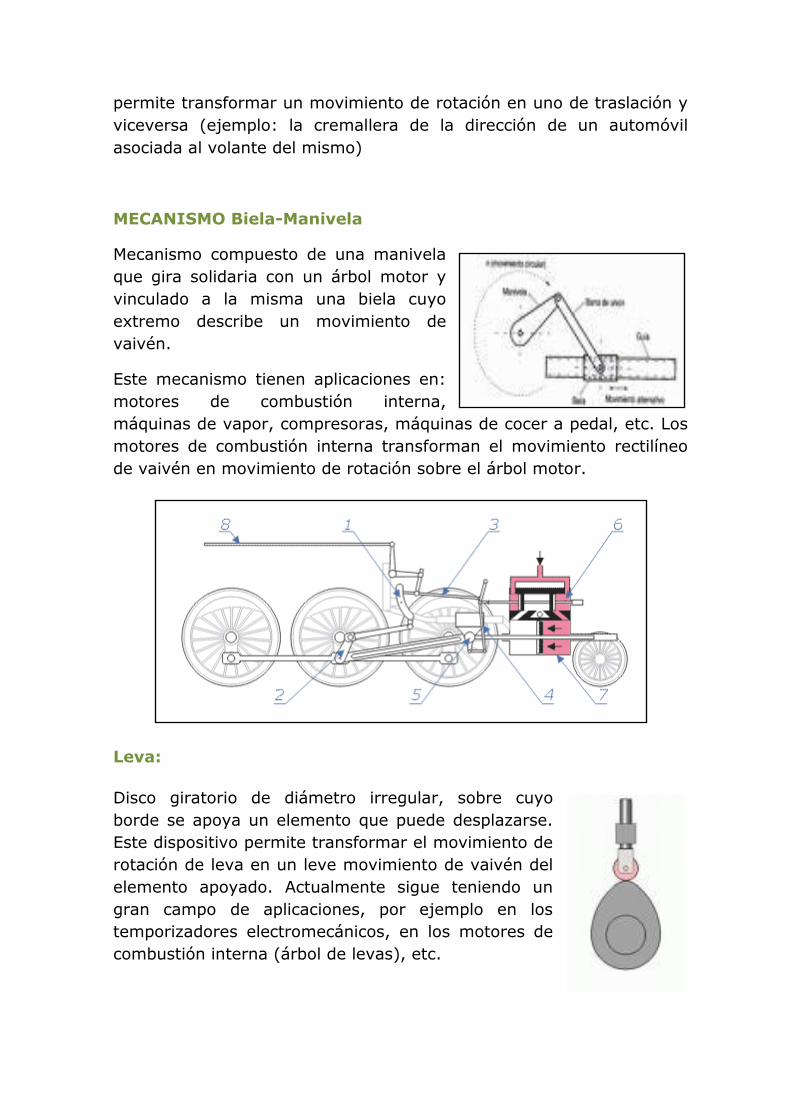
MECANISMO Biela-Manivela
Mecanismo compuesto de una manivela
que gira solidaria con un árbol motor y
vinculado a la misma una biela cuyo
extremo describe un movimiento de
vaivén.
Este mecanismo tienen aplicaciones en:
motores de combustión interna,
máquinas de vapor, compresoras, máquinas de cocer a pedal, etc. Los
motores de combustión interna transforman el movimiento rectilíneo
de vaivén en movimiento de rotación sobre el árbol motor.
Leva:
Disco giratorio de diámetro irregular, sobre cuyo
borde se apoya un elemento que puede desplazarse.
Este dispositivo permite transformar el movimiento de
rotación de leva en un leve movimiento de vaivén del
elemento apoyado. Actualmente sigue teniendo un
gran campo de aplicaciones, por ejemplo en los
temporizadores electromecánicos, en los motores de
combustión interna (árbol de levas), etc.
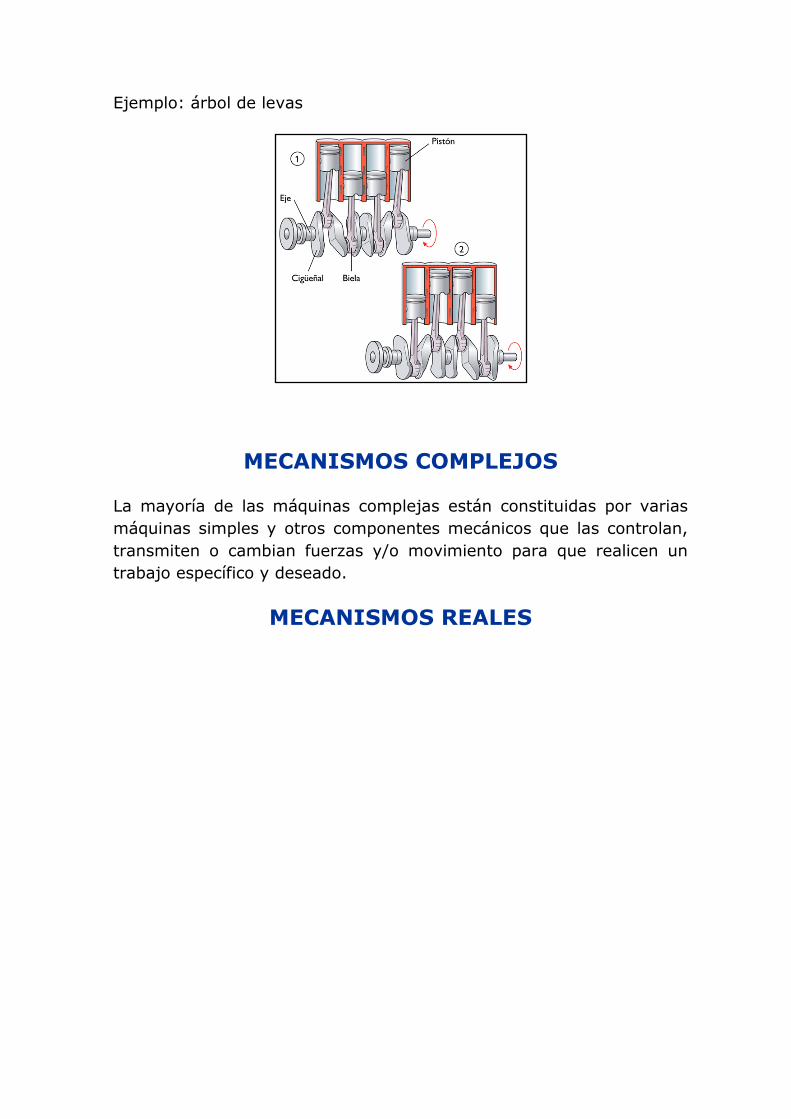
Ejemplo: árbol de levas
MECANISMOS COMPLEJOS
La mayoría de las máquinas complejas están constituidas por varias
máquinas simples y otros componentes mecánicos que las controlan,
transmiten o cambian fuerzas y/o movimiento para que realicen un
trabajo específico y deseado.
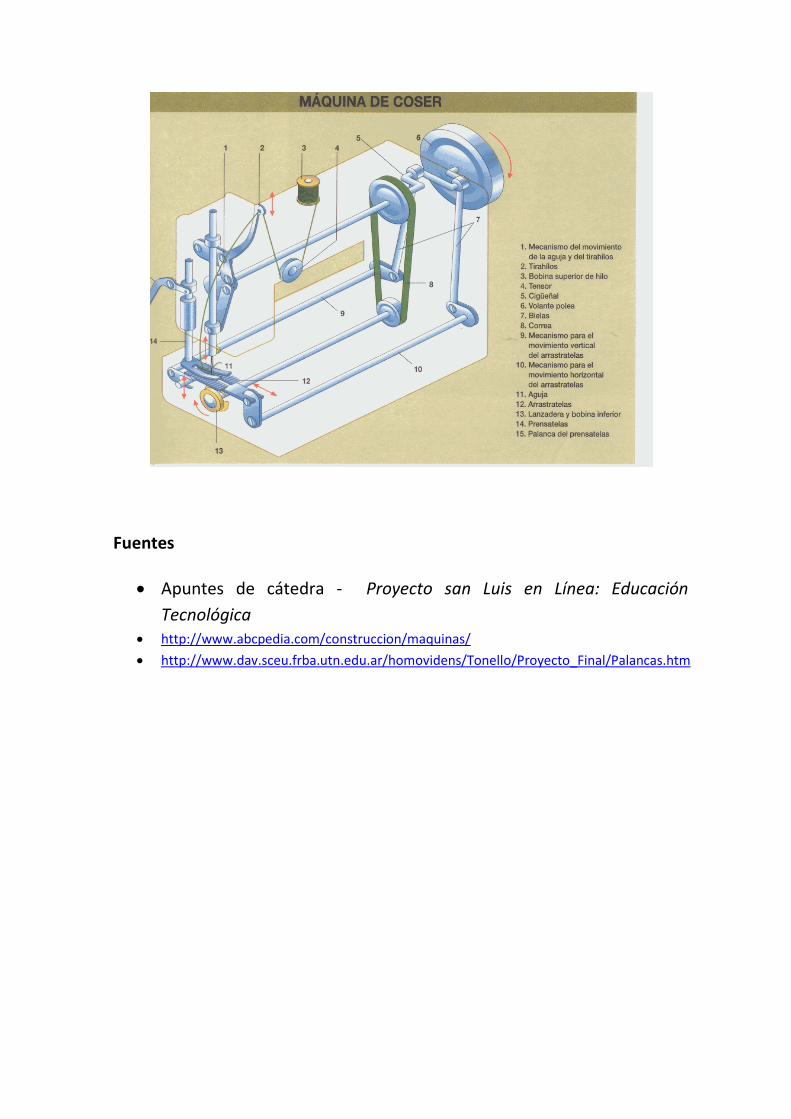
MECANISMOS REALES
Fuentes
Apuntes de cátedra - Proyecto san Luis en Línea: Educación
Tecnológica http://www.abcpedia.com/construccion/maquinas/
http://www.dav.sceu.frba.utn.edu.ar/homovidens/Tonello/Proyecto_Final/Palancas.htm


















