ENSAYO FILTROS 2
10
UNIVERSIDAD POLITECNICA SALESIANA CONTROL III Elio Andrés Rojas. Página 1 Abstract.- En el presente ensayo se tratara acerca de los filtros digitales, empezando con su utilidad y ventajas respecto a los filtros analógicos para luego analizar sus diferentes tipos como los FIR y los IIR, con sus respectivas variantes y implementaciones que se pueden realizar con la herramienta matlab para luego calcular un filtro demostrativo. 1. INTRODUCCION. El filtro digital es cualquier procesamiento realizado en una señal de entrada digital y la implementación es en hardware o software de una ecuación de diferencias. Existen varias ventajas de los filtros digitales como alta inmunidad al ruido, alta precisión (limitada por los errores de redondeo en la aritmética empleada), fácil modificación de las características del filtro, muy bajo costo. Por estas razones, los filtros digitales están reemplazando rápidamente a los filtros analógicos. Existen los filtros FIR (Finite Impulse Response) y los filtros IIR (Infinite Impulse Response). 2. FILTRO FIR. Un filtro FIR de orden M se describe por la siguiente ecuación diferencia: [] [] [ ] [ ] (1) Lo que da lugar a la función de transferencia: [] (2) La secuencia son los coeficientes del filtro. La salida depende sólo de la entrada y no de valores pasados de la salida. La respuesta es por tanto una suma ponderada de valores pasados y presentes de la entrada. Por eso se denomina Media en Movimiento. La función de Transferencia tiene un denominador constante y sólo tiene ceros. La respuesta es de duración finita ya que si la entrada se mantiene en cero durante M periodos consecutivos, la salida será también cero. Existen diversos métodos para el diseño de filtros FIR, entre ellos destacan tres. El más sencillo es el de enventanado de la respuesta impulsional. Durante mucho tiempo se ha trabajado en el diseño de filtros analógicos obteniendo para ello implementaciones caracterizadas porque al llevarlas al campo digital tenían una respuesta de tipo IIR. Desde el punto de vista frecuencial se producen una serie de deformaciones en el espectro del filtro obtenido que nos llevarían a considerables errores a no ser por el uso de ventanas pensadas para este uso. Esas ventanas no son más que secuencias de longitud finita que tienen una respuesta frecuencial que permite que al ser multiplicadas por la función de transferencia utilizada el error no sea muy grande. Básicamente se utilizan tres tipos de ventanas, la de Kaiser, la de Hamming y la de Blackman. A continuación se pueden ver las ventanas antes mencionadas: Figura 1. Ventanas de Kaiser, Hamming y Blackman. FILTROS DIGITALES. Universidad Politécnica Salesiana. Autor: Elio Andrés [email protected] u.ec Cuenca-Ecuador
-
Upload
elio-andres -
Category
Documents
-
view
291 -
download
0
Transcript of ENSAYO FILTROS 2

5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 1/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
Abstract.- En el presente ensayo se tratara acerca de los
filtros digitales, empezando con su utilidad y ventajas
respecto a los filtros analógicos para luego analizar sus
diferentes tipos como los FIR y los IIR, con sus respectivas
variantes y implementaciones que se pueden realizar con la
herramienta matlab para luego calcular un filtro
demostrativo.
1. INTRODUCCION.
El filtro digital es cualquier procesamiento realizado en unaseñal de entrada digital y la implementación es en hardware
o software de una ecuación de diferencias.
Existen varias ventajas de los filtros digitales como alta
inmunidad al ruido, alta precisión (limitada por los errores de
redondeo en la aritmética empleada), fácil modificación de
las características del filtro, muy bajo costo.
Por estas razones, los filtros digitales están reemplazando
rápidamente a los filtros analógicos.
Existen los filtros FIR (Finite Impulse Response) y los filtros IIR
(Infinite Impulse Response).
2. FILTRO FIR.
Un filtro FIR de orden M se describe por la siguiente ecuación
diferencia:
[] [] [ ] [ ] (1)
Lo que da lugar a la función de transferencia:
[]
(2)
La secuencia son los coeficientes del filtro.
La salida depende sólo de la entrada y no de valores pasadosde la salida. La respuesta es por tanto una suma ponderada
de valores pasados y presentes de la entrada. Por eso se
denomina Media en Movimiento. La función de Transferencia
tiene un denominador constante y sólo tiene ceros.
La respuesta es de duración finita ya que si la entrada se
mantiene en cero durante M periodos consecutivos, la salida
será también cero.
Existen diversos métodos para el diseño de filtros FIR, e
ellos destacan tres. El más sencillo es el de enventanado d
respuesta impulsional. Durante mucho tiempo se
trabajado en el diseño de filtros analógicos obteniendo p
ello implementaciones caracterizadas porque al llevarla
campo digital tenían una respuesta de tipo IIR.
Desde el punto de vista frecuencial se producen una serie
deformaciones en el espectro del filtro obtenido que
llevarían a considerables errores a no ser por el uso
ventanas pensadas para este uso. Esas ventanas no son
que secuencias de longitud finita que tienen una respu
frecuencial que permite que al ser multiplicadas po
función de transferencia utilizada el error no sea muy gran
Básicamente se utilizan tres tipos de ventanas, la de Kaise
de Hamming y la de Blackman.
A continuación se pueden ver las ventanas an
mencionadas:
Figura 1. Ventanas de Kaiser, Hamming y Blackman.
FILTROS DIGITALES.Universidad Politécnica Salesiana.
Autor: Elio Andrés [email protected]
Cuenca-Ecuador
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 2/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
Otra metodología para el diseño de filtros la ofrece el
muestreo en frecuencia de la respuesta Ideal. El
procedimiento asegura un error nulo para la aproximación en
un conjunto finito de frecuencias, aquéllas en las que se
muestrea la respuesta frecuencial ideal. Pero no es posible
controlar directamente la amplitud del error. Tampoco se
conoce un criterio estimativo del orden del filtro.
La tercera metodología empleada es la del uso de filtros
óptimos, considerados así aquellos con rizado de amplitudconstante. La respuesta frecuencial que ofrecen los filtros
diseñados mediante la manipulación directa del
comportamiento ideal (el enventanado de la respuesta
impulsional o el muestreo de la respuesta frecuencial),
presenta un error en las bandas de paso y atenuadas cuya
amplitud crece en las proximidades de las bandas de
transición. La solución a ese problema que aporta esta
metodología es la de repartir el error por las diversas bandas
usando una función que lo permita. Se puede usar el método
de Parks-McClellan o también denominado método de
Remez.
Entre las propiedades que se puede comprobar en los
resultados del enventanado para la obtención de filtros FIR
esta el ajuste del orden del filtro por el método de Remez,
que la anchura de la banda de transición del filtro, que se
corresponde con la anchura del lóbulo principal de la
transformada de la ventana, es tanto menor cuanto mayor
sea la longitud, y en definitiva el orden, de la misma.
Sólo dos parámetros son necesarios para la obtención del
filtro y dichos parámetros (beta y N) son fácilmente
obtenibles a partir de unas fórmulas fáciles de usar.
El orden del filtro FIR obtenido por el método de Remez es
menor que el obtenido usando la ventana de Kaiser.La aproximación elíptica al tener un comportamiento de
rizado constante en ambas bandas posibilita que el error
presente alternativamente máximos y mínimos.
Para una selectividad y una discriminación dada no existe un
diseño de menor orden que el que presenta comportamiento
con rizado de amplitud constante. O de otra forma, fijados el
orden y la selectividad del filtro, no puede obtenerse un
diseño con menor discriminación, desde el punto de vista de
los filtros FIR.
2.1 Diseño de Filtros FIR con MATLAB.
Funciones de MATLAB para realizar filtros FIR:
2.1.1 Función FIR1
>> B = fir1(N,Wn,type,window); (3)
Diseña un filtro FIR pasa bajo de orden N (longitud N+1) y
frecuencia de corte Wn (normalizada con respecto a la
frecuencia de Nyquist, 0 <Wn<1). Se pueden especificar otro
tipo de filtros de la misma forma que con los filtros
mediante el parámetro type. Por ejemplo, para un f
parabanda:
>> B = fir1(N,[W1 W2],'stop'); (4)
Por defecto la función FIR usa la ventana de Hamming. O
tipo de ventanas pueden también especificarse:
>> B = fir1(N,Wn,bartlett(N+1)); (5)
>> B = fir1(N,Wn,'high',chebwin(N+1,R)); (6)
2.1.2 Función FIR2
>> B = fir2(N,F,M,window); (7)
Diseña un filtro FIR utilizando el método del muest
frecuencial. Los parámetros de entrada es el orden del f
N(longitud N+1) y dos vectores F y M que especifican
frecuencia y la magnitud, de forma que “plot(F,M)” es
gráfica de la respuesta deseada del filtro.
Se pueden indicar saltos bruscos en la respuesta frecuen
duplicando el valor de la frecuencia de corte.
F debe estar entre 0 y 1, en orden creciente, siendo el pri
elemento igual a 0 y el último 1. El parámetro window in
el tipo de ventana a utilizar. Por defecto, usa la ventana
Hamming.
>> B = fir2(N,F,M,’bartlett(N1)’); (8)
Se pueden especificar más parámetros en esta función,
>> B = fir2(N,F,M,npt,lap,window); (9)
La función fir2 interpola la respuesta frecuencial dese
(F,M) con npt puntos (por defecto, npt=512). Si dos valo
sucesivos de F son iguales, se crea una región de lap pun
alrededor de este punto (por defecto, lap=25).
2.1.3 Función FIRLS
>> B = firls(N,F,M); (10)
Diseño de filtros FIR usando la minimización del error
mínimos cuadrados. Los argumentos de entrada son el ordel filtro N, y dos vectores F y M, cuyo formato difiere de
análogos en la función fir2. El filtro obtenido es la m
aproximación a (F,M) por mínimos cuadrados.
F es un vector que indica los límites de las bandas
frecuencia en parejas (por tanto el tamaño de F debe ser p
y en orden ascendente entre 0 y 1. M es un vector del mis
tamaño que F que indica la magnitud deseada para c
banda de frecuencias.
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 3/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
También existe un argumento opcional que consiste en un
vector W cuyo tamaño es la mitad de F. W es un factor de
ponderación del error para cada banda de frecuencias.
>> B = firls(N,F,M,W); (11)
2.2 Algoritmo de Parks-McClellan
Hay dos funciones en MATLAB para realizar este algoritmo:
remezord y remez.
>> [N,Fo,Mo,W] = remezord(F,M,DEV,Fs) (12)
Calcula el orden N, las bandas de frecuencia normalizadas Fo,
las magnitudes en esas bandas Mo y los factores de
ponderación W que luego serán utilizados como argumentos
de entrada de la función remez. Estos valores cumplen las
especificaciones dadas por F, M, DEV. F es un vector de
frecuencias de corte en Hz, en orden ascendente entre 0 y
Fs/2. Si no se especifica Fs, Fs=2 por defecto. El primer
elemento de F es siempre 0 y el último es siempre Fs/2, perono deben ser especificados en el vector F. El vector M indica
la respuesta deseada en cada banda.
>> b = remez(N,Fo,Mo,W); (13)
Con los valores obtenidos en la función remezord, podemos
implemantar el algoritmo de Parks-McClellan.
3. FILTRO IIR
Existen dos variaciones de este tipo de filtros: AR y ARMA.
3.1 Filtros AR (Autoregresivo).
La ecuación de diferencias que describe un filtro AR es:
[] [] [ ] [ ] (14)
Lo que da lugar a una función de transferencia:
[]
(15)
La función de transferencia contiene solo polos. El filtro es
recursivo ya que la salida depende no solo de la entrada
actual sino además de valores pasados de la salida (Filtros con
realimentación). El término autoregresivo tiene un sentido
estadístico en que la salida y[n] tiene una regresión hacia sus
valores pasados.
La respuesta al impulso es normalmente de duración infinita,
de ahí su nombre.
3.2 Filtros ARMA (Autoregresivo y Media Movimiento).
Es el filtro más general y es una combinación de los filtros
y AR descritos anteriormente. La ecuación de diferencias
describe un filtro ARMA de orden N es:
[] [ ] [ ] [ ]
[] [ ] [ ] (16
Y la función de transferencia:
[]
(17)
Un filtro de este tipo se denota por ARMA(N,M), es deci
Autoregresivo de orden N y Media en Movimiento de or
M. Su respuesta a impulso es también de duración infini
por tanto es un filtro del tipo IIR.
En el caso de los filtros con respuesta al impulso de long
infinita, la expresión de la función de transferencia en
dominio Z es en forma de cociente de polinomios. Por eso
forma de obtener en general la salida en este tipo de filtro
mediante fórmulas recursivas.
Una de las particularidades de estos filtros respecto a los
FIR es el hecho de que su comportamiento respecto a la f
es peor. Además, estos filtros proceden directamente d
aplicación de métodos que tradicionalmente se han aplic
en el desarrollo de filtros analógicos tales como eran
aproximaciones de Butterword, Chebyshev o Elíptica.
La implementación de mayor costo computacional e
Butterword mientras que la que menos (menor orden) e
elíptica. Por su parte, tanto la implementación chebysdirecta como inversa son del mismo orden y, por tanto,
igual complejidad computacional.
Por otra parte, se comprueba en las mismas gráficas que
manifiestan las características propias de cada una de
aproximaciones tratadas.
Las aproximaciones Chebychev y elíptica o de Ca
presentan rizado con amplitud constante en la banda
paso. La elíptica presenta también un rizado en la ba
atenuada, al igual que la chebyshev inversa, que sin emba
presenta una banda de paso plana.
También comprobaremos que la aproximación inversa
Chebychev proporciona filtros con menor distorsión de
que la aproximación elíptica a costa de aumentar ligerame
el orden. La aproximación de Chebychev precisa igual or
que la inversa de Chebychev, pero su fase se comp
considerablemente peor.
La aproximación de Butterworth es la que presenta una
más próxima al ideal para un orden dado, pero el orden
necesita para cumplir las especificaciones suele
notablemente mayor al que requieren las demás.
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 4/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
4. IMPLEMENTACIÓN DE FILTROS DIGITALES
4.1 Realización de Filtros Digitales
Hay dos formas de realizar filtros digitales: Software o
Hardware. En los dos casos debemos hacer un diagrama con
las operaciones a realizar.
- En software se habla de un diagrama de flujo.
- En hardware es un diagrama de bloques, que
especifica los elementos del circuito y sus
interconexiones.
4.2 Propiedades de los diagramas de bloques.
- Conexiones en cascada: La función de Transferencia
global de una conexión en cascada es el producto de
las funciones de Transferencia individuales.
Figura 2. Conexión de dos sistemas en cascada
- Conexiones en paralelo: La función de Transferencia
global de una conexión en paralelo es la suma de las
funciones de Transferencia individuales.
Figura 3. Conexión de dos sistemas en paralelo
- Conexión en realimentación: La salida se realimenta
en la entrada directamente o a través de otros
subsistema. La función de Transferencia global viene
dada por la relación:
() ()
()()(18)
Figura 4. Conexión de un sistema conretroalimentación
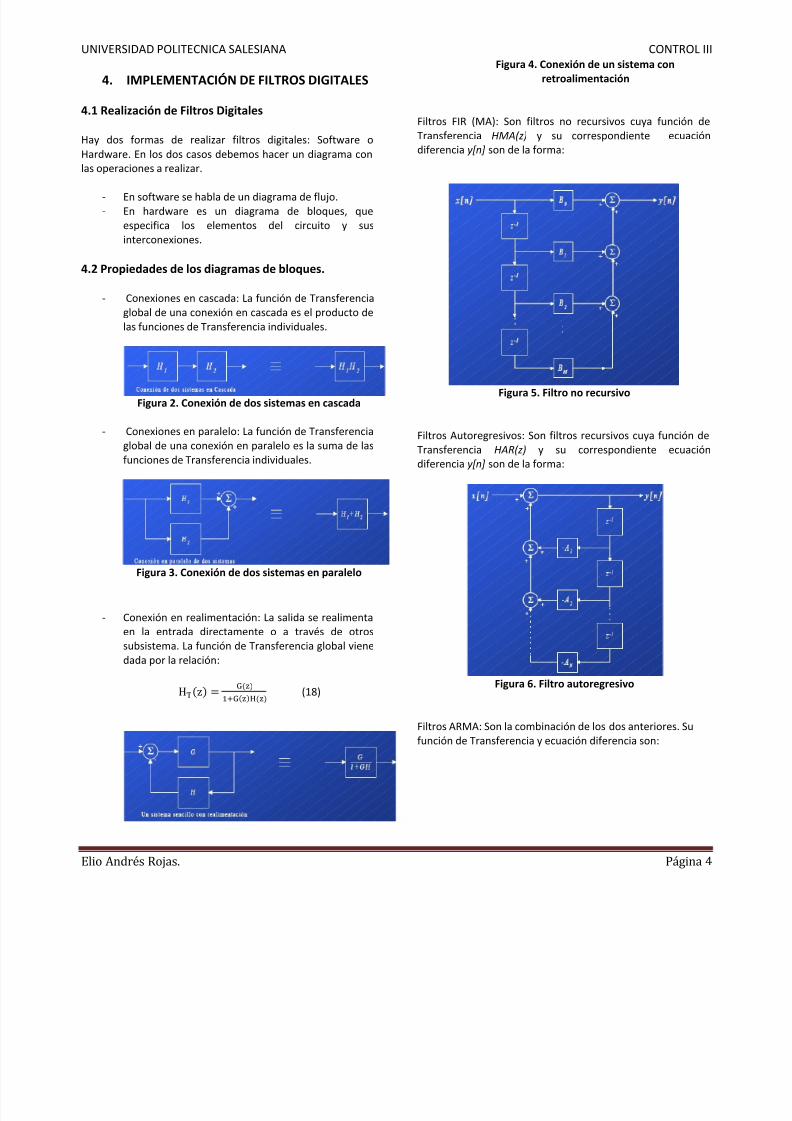
Filtros FIR (MA): Son filtros no recursivos cuya función
Transferencia HMA(z) y su correspondiente ecua
diferencia y[n] son de la forma:
Figura 5. Filtro no recursivo
Filtros Autoregresivos: Son filtros recursivos cuya función
Transferencia HAR(z) y su correspondiente ecua
diferencia y[n] son de la forma:
Figura 6. Filtro autoregresivo
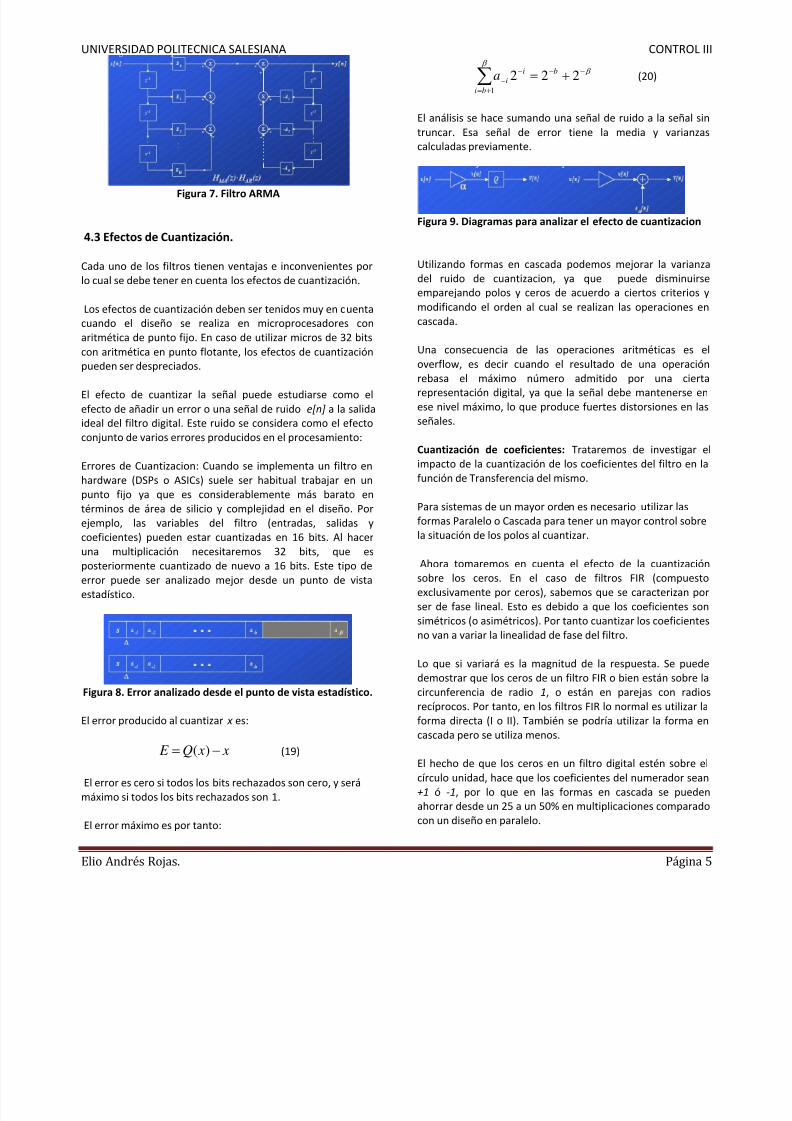
Filtros ARMA: Son la combinación de los dos anteriores. Su
función de Transferencia y ecuación diferencia son:
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 5/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
Figura 7. Filtro ARMA
4.3 Efectos de Cuantización.
Cada uno de los filtros tienen ventajas e inconvenientes por
lo cual se debe tener en cuenta los efectos de cuantización.
Los efectos de cuantización deben ser tenidos muy en cuenta
cuando el diseño se realiza en microprocesadores con
aritmética de punto fijo. En caso de utilizar micros de 32 bits
con aritmética en punto flotante, los efectos de cuantizaciónpueden ser despreciados.
El efecto de cuantizar la señal puede estudiarse como el
efecto de añadir un error o una señal de ruido e[n] a la salida
ideal del filtro digital. Este ruido se considera como el efecto
conjunto de varios errores producidos en el procesamiento:
Errores de Cuantizacion: Cuando se implementa un filtro en
hardware (DSPs o ASICs) suele ser habitual trabajar en un
punto fijo ya que es considerablemente más barato en
términos de área de silicio y complejidad en el diseño. Por
ejemplo, las variables del filtro (entradas, salidas y
coeficientes) pueden estar cuantizadas en 16 bits. Al hacer
una multiplicación necesitaremos 32 bits, que es
posteriormente cuantizado de nuevo a 16 bits. Este tipo de
error puede ser analizado mejor desde un punto de vista
estadístico.
Figura 8. Error analizado desde el punto de vista estadístico.
El error producido al cuantizar x es:
x xQ E )( (19)
El error es cero si todos los bits rechazados son cero, y será
máximo si todos los bits rechazados son 1.
El error máximo es por tanto:
222
1
bi
bi
ia
(20)
El análisis se hace sumando una señal de ruido a la seña
truncar. Esa señal de error tiene la media y varian
calculadas previamente.
Figura 9. Diagramas para analizar el efecto de cuantizacio
Utilizando formas en cascada podemos mejorar la varia
del ruido de cuantizacion, ya que puede disminu
emparejando polos y ceros de acuerdo a ciertos criterio
modificando el orden al cual se realizan las operaciones
cascada.
Una consecuencia de las operaciones aritméticas es
overflow, es decir cuando el resultado de una opera
rebasa el máximo número admitido por una ci
representación digital, ya que la señal debe mantenerse
ese nivel máximo, lo que produce fuertes distorsiones en
señales.
Cuantización de coeficientes: Trataremos de investiga
impacto de la cuantización de los coeficientes del filtro e
función de Transferencia del mismo.
Para sistemas de un mayor orden es necesario utilizar las
formas Paralelo o Cascada para tener un mayor control so
la situación de los polos al cuantizar.
Ahora tomaremos en cuenta el efecto de la cuantiza
sobre los ceros. En el caso de filtros FIR (compue
exclusivamente por ceros), sabemos que se caracterizan
ser de fase lineal. Esto es debido a que los coeficientes
simétricos (o asimétricos). Por tanto cuantizar los coeficien
no van a variar la linealidad de fase del filtro.
Lo que si variará es la magnitud de la respuesta. Se pu
demostrar que los ceros de un filtro FIR o bien están sobr
circunferencia de radio 1, o están en parejas con ra
recíprocos. Por tanto, en los filtros FIR lo normal es utilizaforma directa (I o II). También se podría utilizar la forma
cascada pero se utiliza menos.
El hecho de que los ceros en un filtro digital estén sobr
círculo unidad, hace que los coeficientes del numerador s
+1 ó -1, por lo que en las formas en cascada se pue
ahorrar desde un 25 a un 50% en multiplicaciones compar
con un diseño en paralelo.

5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 6/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
Los ceros en un filtro IIR son más problemáticos. Aquí no
tenemos la seguridad de que los coeficientes son simétricos,
por lo que habrá que tener las mismas consideraciones que
las explicadas en el caso de los polos. Aquí además hay que
tener en cuenta el caso habitual en que varios ceros estén en
z=±1 (ver transformaciones bilineales), por lo que su
cuantización no tendría efectos graves. Lo
más normal es utilizar la forma en cascada, aunque se puede
utilizar la forma en paralelo siempre que no haya unasespecificaciones demasiado exigentes.
Figura 10. Efectos de cuantizacion sobre ceros
4.4 Implementación Hardware de Filtros Digitales.
Las estructuras más simples para sumar y restar son las
estructuras en serie. El tamaño del circuito es mínimo pero
requiere de N ciclos de reloj para producir el resultado (N es
el tamaño de los datos en bits). Sin embargo, un circuito tan
pequeño (retrasos pequeños) permite utilizar un reloj de muyalta frecuencia, lo cual compensa el hecho de necesitar N
ciclos.
Figura 11. Sumador y restador serie
Los sumadores o restadores en paralelo más sencillos son los
que propagan las llevadas (carry propagate o ripple carry ) de
un bit a otro. Como contrapartida producen los retrasos más
largos.
Figura 12. Restador en paralelo
5. APLICACIONES DE FILTROS DIGITALES.
5.1 Diferenciadores FIR.
Diseño de diferenciadores FIR
La respuesta frecuencial de un diferenciador es H(F)=j
para |F|£FC . FC es la frecuencia hasta la que quere
diferenciar. Ya que H(F) es imaginario necesitamos secuen
de los tipos 3 y 4 (simetría impar). Si N es además im
h[0]=0.
Para determinar la secuencia h[n] hacemos la transformad
inversa de H(F),
Fc
Fc
nF j
n
FcnsenFcnFcndF eF jnh
2
)2()2cos(.2.2][
Una vez obtenida la secuencia podemos aplicarle una vent
para reducir sobreimpulsos. Nótese que para secuencias c
N impar, H(0.5)=0.
Diseño de diferenciadores en MATLAB con las funciones fy remez:
Ejemplo para una frecuencia de corte de 0.3 y N=25:
Utilizando funcion firls:
>> Fc=0.3;N=25;
>> B=firls(N,[0 0.3 0.4 0.5]*2,[0 0.3 0 0]*2*pi);
>> [H,W]=freqz(B,1,500);plot(W/(2*pi),abs(H));
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 7/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
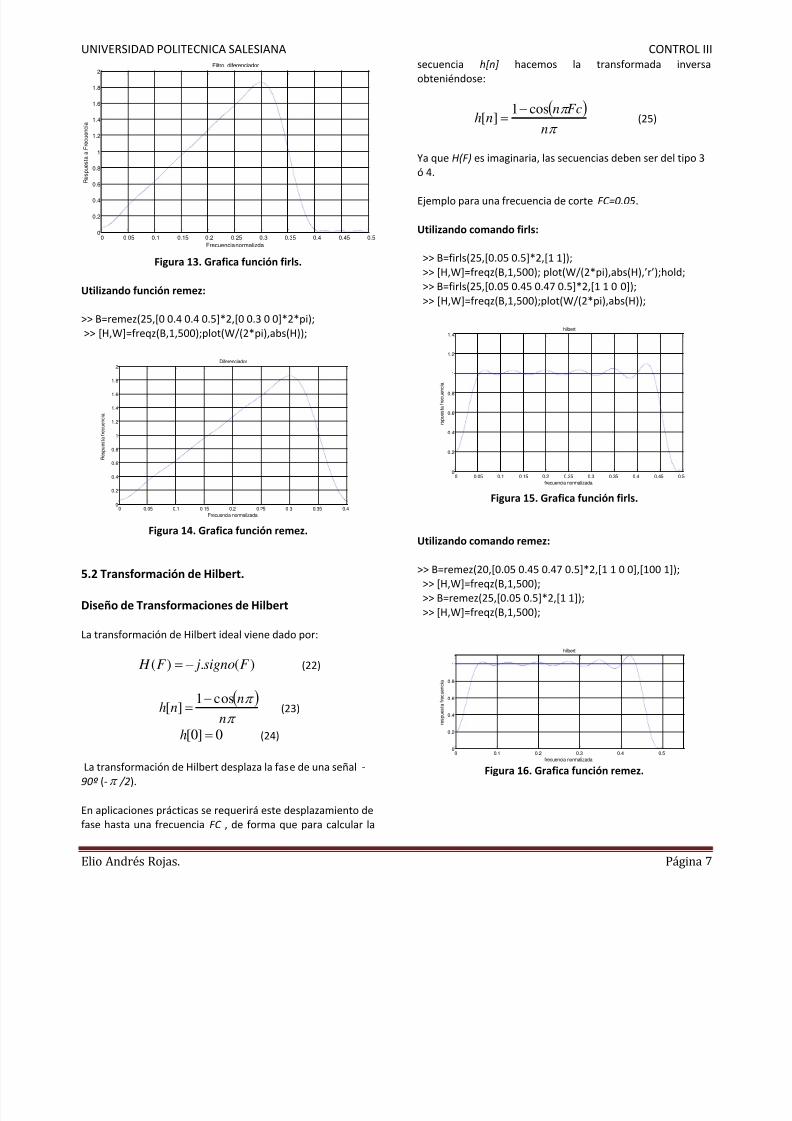
Figura 13. Grafica función firls.
Utilizando función remez:
>> B=remez(25,[0 0.4 0.4 0.5]*2,[0 0.3 0 0]*2*pi);
>> [H,W]=freqz(B,1,500);plot(W/(2*pi),abs(H));
Figura 14. Grafica función remez.
5.2 Transformación de Hilbert.
Diseño de Transformaciones de Hilbert
La transformación de Hilbert ideal viene dado por:
)(.)( F signo jF H (22)
n
n
nh
cos1
][
(23)
0]0[ h (24)
La transformación de Hilbert desplaza la fase de una señal -
90º (- /2).
En aplicaciones prácticas se requerirá este desplazamiento de
fase hasta una frecuencia FC , de forma que para calcular la
secuencia h[n] hacemos la transformada inv
obteniéndose:
n
Fcnnh
cos1][
(25)
Ya que H(F) es imaginaria, las secuencias deben ser del tip
ó 4.
Ejemplo para una frecuencia de corte FC=0.05.
Utilizando comando firls:
>> B=firls(25,[0.05 0.5]*2,[1 1]);
>> *H,W+=freqz(B,1,500); plot(W/(2pi),abs(H),’r’);hold;
>> B=firls(25,[0.05 0.45 0.47 0.5]*2,[1 1 0 0]);
>> [H,W]=freqz(B,1,500);plot(W/(2*pi),abs(H));
Figura 15. Grafica función firls.
Utilizando comando remez:
>> B=remez(20,[0.05 0.45 0.47 0.5]*2,[1 1 0 0],[100 1]);
>> [H,W]=freqz(B,1,500);
>> B=remez(25,[0.05 0.5]*2,[1 1]);
>> [H,W]=freqz(B,1,500);
Figura 16. Grafica función remez.
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Frecuencia normalizda
R e
s p u e s t a a F r e c u e n c i a
Filtro diferenciador
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.40
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
Frecuencia normalizada
R e s p u e s t a f r e c u e n c i a
Diferenciador
0 0.05 0.1 0.15 0.2 0.25 0.3 0.35 0.4 0.45 0.50
0.2
0.4
0.6
0.8
1
1.2
1.4
hilbert
frecuencia normalizada
r s p u e s t a f r e c u e n c i a
0 0.1 0.2 0.3 0.4 0.50
0.2
0.4
0.6
0.8
1
hilbert
frecuencia normalizada
r e s p u e
s t a f r e c u e n c i a

5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 8/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
5.3 Interpolación y Decimación.
5.3.1 Filtro de Interpolación
Para interpolar la señal de entrada no tenemos más que
aplicar un filtro pasobajo a la salida del up-sampler . De esta
forma los ceros que habíamos insertado en el up-sampler se
convierten ahora en valores interpolados.
Podemos obtener las especificaciones del filtro pasobajo
necesario. Supongamos que x[n] ha sido obtenido
muestreando una señal continua x a(t) cuyo espectro viene
dado por X a(j w ). El espectro de x[n] es X(e j Ω
). Estas dos
transformadas están relacionadas por la siguiente expresión:
k
aT
k f X
T f X
00
1)( (26)
Donde T 0 es el periodo de muestreo. Si muestreamos x a(t) a
una frecuencia mayor de forma que T=T 0 /L, obtenemos y[n],
cuya transformada de Fourier es Y(e j Ω
), tenemos:
k
a
k
aT
Lk f X
T T
k f X
T f Y
00
.11)( (27)
5.3.2 Decimación: disminución de la frecuencia de
muestreo en un factor entero.
Down-Sampler.
Hacer un down-sampling de un factor entero M>1 consiste
en guardar uno de cada M valores muestreados y eliminando
los M-1 muestreos intermedios, generando una señal de
salida x d [n] de acuerdo con la siguiente relación: x d [n]=x[nM].
Al igual que la operación de up-sampling, el downsampling es
lineal pero es variante en el tiempo. Disminuir la frecuencia
puede tener implicaciones a la hora de cumplir el teorema del
muestreo, por lo que tendremos que introducir un filtro
pasobajo antes de hacer el down-sampling.
5.3.3 Función de Transferencia del Down-Sampler
Creamos una función auxiliar x aux [n], que definimos:
otro
M M nn xn X aux
0
....2,,0][][
(28)
Relacionamos xaux[n] con x[n] por medio de:
][].[][ n xncn X aux (29)
Donde:
otroo
M M nnc
2,,01][ (30)
1
0
2
1
0
2
).(1
)(
1].[].[)(
M
k
kn j
aux
n n
M
k
kn j
aux
e z X M
z X
e M
n zn xnc z X
(31)
1
0
.(21
0
211
)(.1
)( M
k
M
t f j
d
M
k
M
kn j
M d
s
e X M
f X e z X M
z X
(32)
Esto quiere decir que la función de transferencia del do
sampler es la suma de M versiones ensancha
(multiplicación por ts) y desplazadas de la función
transferencia X(z), y multiplicadas por el factor 1/M. Debid
que se ha disminuido la frecuencia de muestreo en un fa
M.
Este filtro deberá colocarse antes del down-sampler para
efectivo. Un filtro ideal deberá tener una frecuencia de c
igual a /M. En la práctica siempre tendremos una ba
de transición por lo que las especificaciones de filtro serán
w M
M
wcw
ej H w
0
1
(33)
5.3.4 Interpolación y Decimación en MATLAB:
Interpolación:
>> N=50;n=0:N-1;L=6;M=L*N;>> x = sin(2*pi*0.14*n)+ sin(2*pi*0.21*n);
% Generar la secuencia del up-sampler
>> xu = zeros(1,M);
>> n1 = 1:M;
>> xu([1:L:M]) = x;
>> figure;stem(n,x);
>> figure;stem(n1,xu);hold;
% Frecuencia de corte del filtro pasobajo = pi/6 --> 1/12
5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 9/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Págin
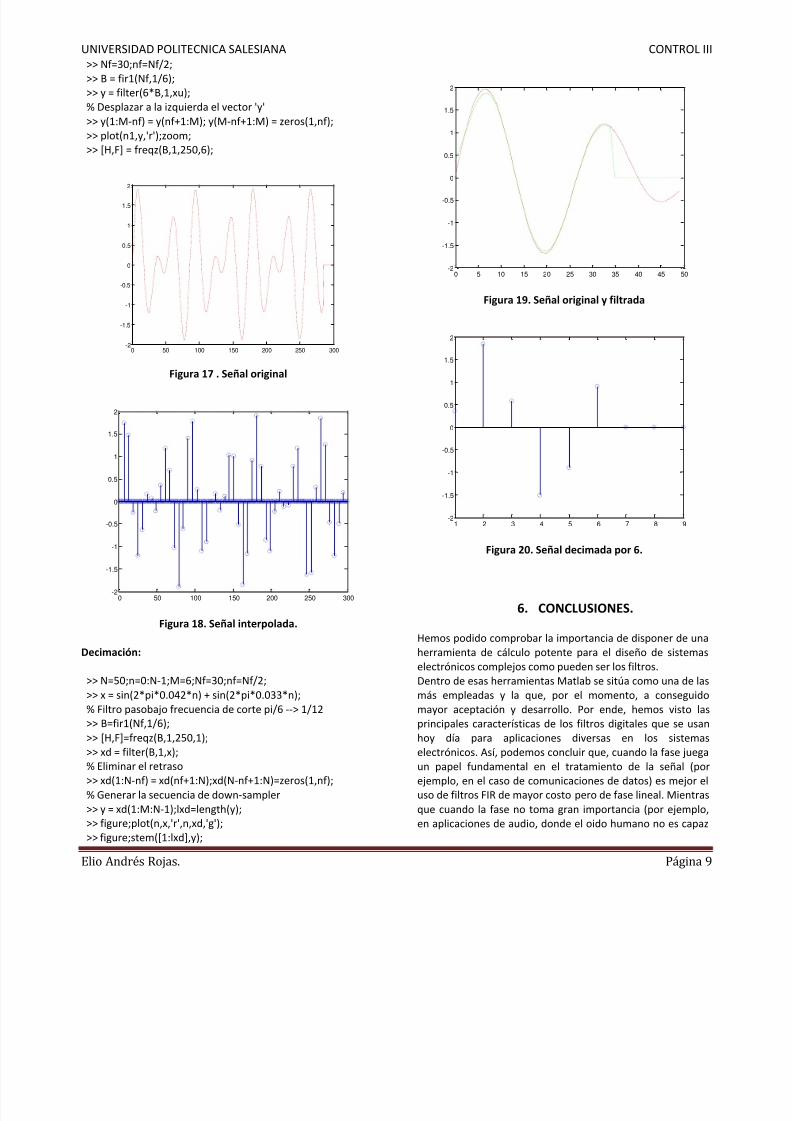
>> Nf=30;nf=Nf/2;
>> B = fir1(Nf,1/6);
>> y = filter(6*B,1,xu);
% Desplazar a la izquierda el vector 'y'
>> y(1:M-nf) = y(nf+1:M); y(M-nf+1:M) = zeros(1,nf);
>> plot(n1,y,'r');zoom;
>> [H,F] = freqz(B,1,250,6);
Figura 17 . Señal original
Figura 18. Señal interpolada.
Decimación:
>> N=50;n=0:N-1;M=6;Nf=30;nf=Nf/2;
>> x = sin(2*pi*0.042*n) + sin(2*pi*0.033*n);
% Filtro pasobajo frecuencia de corte pi/6 --> 1/12>> B=fir1(Nf,1/6);
>> [H,F]=freqz(B,1,250,1);
>> xd = filter(B,1,x);
% Eliminar el retraso
>> xd(1:N-nf) = xd(nf+1:N);xd(N-nf+1:N)=zeros(1,nf);
% Generar la secuencia de down-sampler
>> y = xd(1:M:N-1);lxd=length(y);
>> figure;plot(n,x,'r',n,xd,'g');
>> figure;stem([1:lxd],y);
Figura 19. Señal original y filtrada
Figura 20. Señal decimada por 6.
6. CONCLUSIONES.
Hemos podido comprobar la importancia de disponer de
herramienta de cálculo potente para el diseño de siste
electrónicos complejos como pueden ser los filtros.
Dentro de esas herramientas Matlab se sitúa como una de
más empleadas y la que, por el momento, a consegu
mayor aceptación y desarrollo. Por ende, hemos vistoprincipales características de los filtros digitales que se u
hoy día para aplicaciones diversas en los siste
electrónicos. Así, podemos concluir que, cuando la fase ju
un papel fundamental en el tratamiento de la señal
ejemplo, en el caso de comunicaciones de datos) es mejo
uso de filtros FIR de mayor costo pero de fase lineal. Mien
que cuando la fase no toma gran importancia (por ejem
en aplicaciones de audio, donde el oido humano no es ca
0 50 100 150 200 250 300-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 50 100 150 200 250 300-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
0 5 10 15 20 25 30 35 40 45 50-2
-1.5
-1
-0.5
0
0.5
1
1.5
2
1 2 3 4 5 6 7 8 9-2
-1.5
-1
-0.5
0
0.5
1
1.5
2

5/17/2018 ENSAYO FILTROS 2 - slidepdf.com
http://slidepdf.com/reader/full/ensayo-filtros-2 10/10
UNIVERSIDAD POLITECNICA SALESIANA CONTRO
Elio Andrés Rojas. Página
de discernir pequeñas variaciones de la fase) el empleo de
filtros IIR, de menor costo, es el apropiado.
7. REFERENCIAS.
[1] “ Tratamiento de señales en tiempo discreto”
Alan V. Oppenheim Ronald W. Schafer
[2]“ Tratamiento digital de señales”, Proakis, John G
*3+ “Signals and Systems”, Ziemer Rodger E.
*4+ “Signals and Systems”, A.V. Oppenheim.