DISENO_DE_UN_AMPLIFICADOR_DE_AUDIO_E_IMP.pdf
22
PRÁCTICA 4 DISEÑO DE UN AMPLIFICADOR DE AUDIO E IMPLEMENTACIÓN DE PUENTE H. ANDRES BETANCUR CAÑOLA C.C. 1045020561 FERLEY VALLEJO CASTRO C.C. 70757061 Profesor Ingeniero LUIS FELIPE ECHEVERRI UNIVERSIDAD CATÓLICA DE ORIENTE FACULTAD DE INGENIERÍA DISEÑO ANALOGO II PROGRAMA INGENIERIA ELECTRÓNICA RIONEGRO ANTIOQUIA 2012
-
Upload
agaminedes -
Category
Documents
-
view
10 -
download
1
Transcript of DISENO_DE_UN_AMPLIFICADOR_DE_AUDIO_E_IMP.pdf

PRÁCTICA 4
DISEÑO DE UN AMPLIFICADOR DE AUDIO E IMPLEMENTACIÓN DE PUENTE H.
ANDRES BETANCUR CAÑOLA
C.C. 1045020561
FERLEY VALLEJO CASTRO
C.C. 70757061
Profesor
Ingeniero
LUIS FELIPE ECHEVERRI
UNIVERSIDAD CATÓLICA DE ORIENTE
FACULTAD DE INGENIERÍA
DISEÑO ANALOGO II
PROGRAMA INGENIERIA ELECTRÓNICA
RIONEGRO ANTIOQUIA
2012

INTRODUCCIÓN.
El presente informe de laboratorio expone mediante una serie de pasos secuenciales la construcción de un amplificador de potencia para audio de 5W y 8 Ω de resistencia.
En él se exponen los fundamentos básicos de los amplificadores de potencia, utilizando exclusivamente componentes básicos, tales como resistencias, capacitores y transistores; la amplificación se realizara mediante el llamado amplificador clase AB, cuya característica principal yace en la pequeña corriente de polarización que se inyecta para que los transistores involucrados estén transmitiendo a la llegada de la señal.
De igual forma se evidencian los cálculos efectuados para garantiza la estabilidad del punto de funcionamiento, lo que significa que los transistores no entren a corte, para ello se realiza el espejo de corriente.
Finalmente se expone una gráfica de la simulación del amplificador donde se evidencian los resultados obtenidos.
La segunda parte de este laboratorio expone el diseño de un Puente H, su construcción y funcionamiento, en síntesis se evidencia el control de un motor por medio del voltaje y la corriente con que se alimenta un circuito digital.
El tema del trabajo se refiere a la medición real y virtual de parámetros en un circuito que incorpora elementos pasivos como resistores y elementos activos como los transistores BJT (2N2222) y transistores darlington (TIP) de distinta denominación.

OBJETIVOS.
• Realizar los cálculos de diseño para un amplificador de potencia para audio y los factores que en el intervienen.
• Simular y montar el amplificador de audio transistorizado con el fin de obtener una potencia deseada de 5W.
• Entender el funcionamiento del circuito puente H para el cambio de giro de un motor de corriente continua.
• Entender como por medio de la técnica PWM se puede reducir o aumentar la velocidad de un motor.
• Utilizar las características de los transistores y un diseño implementado que permite controlar el giro de un motor, en sentido horario o anti horario.
• Entender el funcionamiento del circuito puente H para el cambio de giro de un motor de corriente continua.

AMPLIFICADOR DE POTENCIA PARA AUDIO.
El esquema que se presenta a continuación corresponde al diseño del amplificador de potencia para audio, clase AB. La potencia para la cual debe operar será de 5 W y la carga será de 8 Ω (correspondiente al altavoz), el diseño será evaluado de derecha a izquierda; de esta forma se iniciara con el cálculo de la fuente de alimentación
Ilustración 1. Esquema del amplificador de potencia para audio

1. CÁLCULO DE LA FUENTE DE ALIMENTACIÓN.
= ∗ = /
=
= pico√2 ∗ 1
pico = 2P
Vcc = 2 ∗ P
Vcc = 28Ω ∗ 5w = . !
El anterior valor hallado para la fuente de alimentación de 8.94V se aproxima a 15V, lo que garantiza que el sistema no se sature, y será bajo este valor sobre el cual continuaran los siguientes pasos a excepción del cálculo requerido para hallar la corriente que debe suministrar la fuente, como se verá a continuación.
La corriente máxima que deberá suministrar cada fuente será:
Ic = Vcc
Ic = 8.94V8Ω
& = '. ''(
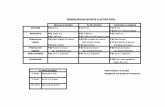
2. CARACTERÍSTICAS DE LOS TRANSISTORES.
Los transistores Q5 y Q3 tendrán las siguientes características:
)*+ ≥ 15-
) ≥ 1.11A
/ = 20. Los transistores de potencia 2N3055 de acuerdo al Data Sheet nos garantizan estos valores.

Ilustración 2. Datos importantes Data Sheet 2N3055
3. CARACTERÍSTICAS DE LAS RESISTENCIAS R9 Y R11.
Las resistencias R9 y R11 se eligen de 0.47 ohm. Al ser de potencia, es necesario calcular la potencia disipada.
= ∗ = I ∗ R
= 1.11A ∗ 0.47Ω = 34 . 5467
R9 y R1 son resistencias de 0,47Ω y con una capacidad de disipación de 579.087mW

4. CARACTERÍSTICAS DE LOS TRANSISTORES Q3 Y Q4.
Q4 es un transistor NPN en configuración Darlington junto con Q6. Q3 es un transistor PNP en configuración darlington complementario junto con Q5. Q4 y Q5 equivalen a un transistor NPN de:
β= β1* β2
Q3 y Q5 equivalen a un transistor PNP de:
β= β1* β2
Los transistores de potencia, Q3 y Q6, tienen una β aproximada de 20, para este caso se eligen de referencia 2N3055, debido a sus características que se pueden observar en el datasheet.
Para el caso de Q4 se elige un transistor con un β igual a 100, en este caso se utilizará un 2n2222A.
Para el caso de Q5, el cual es un transistor PNP de β igual a 100 se escoge un transistor 2N2905
5. CÁLCULO DE LA RESISTENCIA R8
Para calcular R8 se necesita saber la corriente y la diferencia de potencial en los extremos. En reposo, la tensión en RL es 0 v. Despreciando la caída de tensión en la resistencia de 0,47Ω, la tensión en la base de Q4 es de 1.4v
El valor máximo de la corriente por la base es:
8 = )/1 ∗ /2
8 = 1.11A20 ∗ 100
9: = 333;<
Garantizando la corriente que deberá circular por el transistor Q2 adicional a la que circulará por los diodos, la corriente que se tomará es de aproximadamente 5 veces mayor a la hallada con anterioridad:
81 ≅ 5 ∗ 8
9:' = >6<

? = )) − 2 ∗ 8*81
? = 15 − 1.42AB
C = D. E
6. CÁLCULO DEL CAPACITOR C4.
El capacitor C4 garantiza la unión eléctrica de las bases de los transistores para alterna. Se puede realizar un cálculo aproximado para obtener este valor.
F4 = 12G ∗ H ∗ 3JK
Los diodos tienen una resistencia JK, la cual puede ser determinada mediante al siguiente ecuación para su comportamiento en AC.
JK = L
JK = 25A5AB
MN = 3Ω
Sustituyendo:
F4 = OP∗QRS∗T∗UΩ
F4 = 530.516WX Y!≈ 3Z5[\
7. ELECCIÓN DE LOS DIODOS D1, D2 Y D3.
La corriente que circulará por estos diodos será pequeña, 5mA. Por esto se pueden elegir cualquier tipo de diodos de señal, por ejemplo el 1N4148.

8. ELECCIÓN DEL TRANSISTOR Q2.
El transistor Q2 funcionará a una corriente y a una tensión muy reducida. De esta forma se deduce que cualquier transistor puede utilizarse para esta aplicación, de esta forma se optó por un transistor PNP 2N2222A, el cual tiene un β igual a 100.
9. CÁLCULO DE R7.
Esta resistencia debe calcularse de forma que permita el correcto funcionamiento del transistor Q2 para cualquier variación de la señal de entrada. Se elegirá una caída de tensión de Vcc/10, es decir 1.5v.
] = ))/10)
] = 1.5-5AB
C4 = Z55Ω
10. CÁLCULO DE R5.
Se elige una corriente por R5 y R6 superior a la de la base. La corriente por la base de Q2 es:
Ib2 = Ic2β2
Ib2 = 2mA100
&a> = >5b( Se toma una corriente de 400uA, así se podrá despreciar la corriente de la base.
U = 1.4 + 0.7)
U = 2.3-400uA
C3 = 3. 3eΩ ≈ 3. DE

11. CÁLCULO DE R6.
La corriente es de 400uA, la diferencia de potencial en los extremos será:
= )) − −8.3 = 17-
Entonces:
6 = 17-400uA
CD = !>. 3E ≈ Z eΩ
12. ELECCIÓN DE Q1.
El transistor Q1 será utilizado como transistor de señal, se puede elegir perfectamente un 2N2222A.
13. CÁLCULO DE R3 Y R4.
Se elige una corriente de colector de 5AB, un punto de funcionamiento en clase A y una tensión de emisor de 1.5 V. A partir de estos datos se diseñan las resistencias:
3 = *)
3 = 1,5-5AB
CZ = Z55 ≈ ZZ5Ω.
En el colector de Q1 se tiene la siguiente tensión:
) = * ∓ )*
) = * + ))2
) = 1.5 + 152
) = 9-
Y para hallar R4:

4 = )) − ))
4 = 15- − 9-5AB
C! = '. >eΩ. La ganancia de esta etapa será:
< = >5 ∗ ijk C!//lm>MN' + CZ
La impedancia de entrada de la siguiente etapa es:
no = U//p//q ∗ JK2 + ] lm> = Z. E
B = 20 ∗ r+s1.2tΩ//3.9uJK1 + 330Ω
< = . 43Nv
14. CÁLCULO DEL CAPACITOR C3.
C3 se calcula a partir de la siguiente expresión:
F3 = 12G ∗ 20wn ∗ x + no
F3 = 12G ∗ 20wn ∗ 1.2tΩ+ 3.9u
F3 = 1.6WX
15. CÁLCULO DE R1 Y R2.
La corriente por la base de Q1 es:
81 = )100 =
5AB100 = 50yB
Se toma una corriente por R1 diez veces superior para poder hacer aproximaciones, así:

Q = 500yB
La tensión en la base de Q1 es:
81 = *1 + 8*1
81 = 1.5 + 0.7
z:' = >, >
Entonces:
1 = 2,2-500yB
C' = D. !e
Y para calcular R2, se realiza de la siguiente manera:
2 = )) − 81+
2 = 16- − 2,2-500yB
C> = >Z. DEΩ ≈ >>EΩ
16. CÁLCULO DE LA IMPEDANCIA DE ENTRADA.
La impedancia de entrada del amplificador se calcula a partir de la siguiente expresión:
no = O////q ∗ JK1 + T lm> = !. Z' EΩ
17. CÁLCULO DE C1.
El cálculo de C1 se realiza a partir de la impedancia de entrada y dela frecuencia inferior de corte, con la siguiente expresión:
F1 = 12G ∗ 20wn ∗ no
Y' ≅ '5;|

DESCRIPCIÓN DEL PROBLEMA
Introducción
La interfaz de potencia para motores de corriente continua o CD, PUENTE H, es
un sistema que permite controlar motores en rangos considerables tanto de voltaje
como de corriente, el que se montará en la práctica permite controlar motores en
rangos entre 12 y 30 voltio, con consumos de unos pocos amperios; por medio de
señales de baja potencia provenientes de un circuito digital.
En general cualquier tipo de sistema digital puede adquirir fácilmente la capacidad
para activar motores de CD haciéndolos girar en uno o en otro sentido usando la
interfaz Puente H como puente entre el sistema digital y el motor de CD. Las
principales características de la interfaz Puente H se enumeran a continuación:
- Activación de motores en un rango entre 9 y 30 voltios DC.
- Capacidad para entregar hasta 2.5 Amperios a la carga.
- Capacidad para activar el giro del motor en cualquiera de los dos sentidos.
Modulación por Ancho de Pulso (PWM -Pulse WidthModulation)
La modulación por ancho de pulso es una técnica para controlar circuitos
analógicos con salidas de procesadores digitales. Puede usarse para controlar la
velocidad de un motor, la intensidad de una lámpara, etc. La base de PWM es la
variación del ciclo útil (DutyCycle) de una señal cuadrada.
Al cambiar el ciclo de trabajo se modifica el voltaje promedio (VAVG).

• Para un ciclo de trabajo de 50%:
Se debe de resaltar que el motor necesita un tope de energía mínima para poder
generar el par motor suficiente para romper el estado de reposo. Este depende de
las cualidades mecánicas del motor.
Montaje
No habilite las entradas INA e INB a la vez, recuerde que si la carga es inductiva
debe agregar diodos de protección.
1. Monte el siguiente circuito
Ilustración 3: Puente H

a) Describa con sus palabras el funcionamiento del circuito, como se activan
los transistores y como es el flujo de la corriente, realice una simulación en
multisim y compruebe ese análisis, demás, móntelo y verifique su
funcionamiento.
b) Con el generador introduzca una señal de una frecuencia de 1KHz y
comience a variar el ciclo de dureza, saque conclusiones al respecto.
c) Aumente la frecuencia y repita el proceso anterior, e indique cual es la
máxima frecuencia a la cual el circuito no responde, y cuál es el mínimo
ciclo de dureza que se requiere para hacer arrancar el motor. porque se
presenta esto.
d) Porque no se pueden habilitar las dos entradas a la vez, y que circuito
lógico o análogo podrían implementar para evitar este problema.
2. consulte cómo funciona el circuito l293d, anexe los datos más relevantes lo
circuitos más útiles y realice con este integrado los puntos a, b y c
anteriores, además consigne la diferencia entre Vcc1 y Vcc2, responda que
sucede en éste circuito si se habilitan las dos entradas 1A y 2A con la
terminal EN activa.
No olvide incluir sus conclusiones en el informe.

FUNCIONAMIENTO DEL PUENTE H
El puente H implementado consiste en cuatro pares de transistores, dos transistores TIP 125 PNP, dos transistores NPN TIP 120 y cuatro transistores 2n2222 de pequeña señal que sirven como interruptores de los transistores TIP, el circuito del puente H se observa en la figura uno.
Mientras el voltaje en las entradas A y B sea cero la corriente no puede circular por el motor ya que los transistores superiores Q1 y Q2 no permiten el paso de la corriente.
Si una de las entradas se alimenta con un voltaje y la otra se mantiene en cero, dos de los transistores TIP permiten que la corriente circule por el motor y llegue a tierra, dependiendo de la entrada que se esté alimentando se generará el sentido hacia el cual gira el motor, es decir el giro del motor está dado por la conexión que se le haga en sus terminales.
Según lo analizado en el circuito, los transistores Q1, Q2, Q3, Q6, Q7 y Q8 trabajan en corte y saturación, mientras que los transistores Q4 y Q5 trabajan en activa.
Las resistencias limitan la corriente y de este modo permiten el correcto funcionamiento del resto del circuito.
Ilustración 4: Circulación de la corriente con A activo y B inactivo

Ilustración 5: Circulación de la corriente con B activo y A inactivo
Comprobacion MULTISIM
Ilustración 6: sin habilitación de las entradas

En la ilustracion 6, al no habilitar ninguna entrada se tiene la misma diferencia de
potencial por consiguiente no hay corriente en el motor y por ende no gira.
Ilustración 7: Habilitando entrada j1
Ilustración 8: habilitando entrada j2

Como se pudo apreciar en la ilustración 7 y 8 siempre que halla una diferencia de
potencial el motor podrá girar en un sentido de acuerdo a la polarización asignada.
VARIACIÓN DEL CICLO DE DUREZA
Con un una frecuencia de 1 KHz, teniendo la señal en cero voltios y al ir
aumentando el ciclo de dureza se visualizara que si este es muy pequeño el motor
no podrá arrancar; esto debido a que el motor necesita una cantidad de energía
para empezar a funcionar. A esta frecuencia el motor necesita alrededor del 27%
del ciclo de dureza para entrar en funcionamiento, a medida que aumente el ciclo
de dureza el motor empezará a girar más rápido.
AUMENTO DE FRECUENCIA
A medida que se aumenta la frecuencia se observa que el ciclo de dureza puede
disminuirse y el circuito responderá de igual manera, pero también se debe tener
en cuenta que la frecuencia no podrá elevarse a un valor indeterminado, debido a
que los transistores poseen una respuesta en frecuencia y llegara el momento en
que estos no puedan switchear, dicho valor esta alrededor de los 67khz
CIRCUITO DE PROTECCIÓN
Para solucionar este inconveniente se hará uso de una doble compuerta xor, a continuación se adjunta las compuertas y la tabla de verdad del circuito
Ilustración 9: sistema de protección puente H

Si las entradas A y B se habilitan al tiempo, los transistores Q7 y Q8 evitan que vcc se una con la tierra del circuito y se genere un corto, estos transistores funcionan como protección del circuito.
CON EL INTEGRADO
Las diferencias entre vcc1 y vcc2 es que vcc1 se alimenta con 5v voltios ya que está integrado utiliza lógica TTL y vcc2 es la polarización del motor.
Las terminales 4, 5, 12 y 13 se conectan a tierra. La terminal 8 es el voltaje de polarización para el motor. La terminal 16 es la polarización del puente H. Cuando la terminal 1 esta activada, ósea un 1 lógico (5v), se habilitaran las salidas out1 y out2.

Ilustración 10: esquema de puente h con el integrado l293b
Ilustración 11: tabla de verdad para el puente h con integrado l293b
El funcionamiento del integrado se puede observar siguiendo la ilustración anterior, en la cual se observa que si se tiene un voltaje alto en la terminal 2 y un voltaje de cero en el terminal 7, se tendrá un voltaje alto en la terminal 3 y uno de cero en 6, esto generara una flujo de corriente a través del motor y hará que el motor gire. Se puede observar como al Variar el ciclo de dureza se puede aumentar o disminuir la velocidad del motor.

CONCLUSIONES
La resistencia R8 en el circuito de potencia de la ilustración 1 es fundamental para el óptimo funcionamiento del amplificador, en este caso se utilizó un potenciómetro de 10 k, la graduación de la resistencia apropiada se determinó mediante la toma de la señal de salida por medio del osciloscopio, buscando el cero de operación; una vez establecido se toma este valor como apropiado para la resistencia R8. La potencia de cada elemento se debe calcular para obtener los elementos adecuados con el propósito de evitar daños al momento de la implementación en la proto board. Durante la diseño de cada uno de los circuitos se debe tener presente que los elementos a utilizar deben ser de valores comerciales, por tanto los cálculos matemáticos deben ser aproximados, pues esto permitirá optimizar el uso de elementos, evitando generar series y paralelos que consuman espacio en el momento de la implementación. Se pudo observar como el puente H permite a un motor eléctrico DC girar en ambos sentidos, avance y retroceso. Estos pueden ser ampliamente usados en robótica y como convertidores de potencia. Los transistores tienen un tiempo de reacción mucho mejor que otros componentes por no tener partes mecánicas que hagan contacto al aplicarles una corriente eléctrica. Para especificaciones determinadas, es más práctico utilizar el integrado l293d, debido a su fácil manejo, pero se debe tener en cuenta las limitaciones de este circuito.