Discretización PID.docx
7
111Equation Chapter 1 Section 1DISCRETIZACIÓN DEL PID 1) Introducción Tal vez el controlador más conocido tanto en el nivel académico como en el nivel industrial es el PID esto se debe a su estructura flexible y a su relativamente fácil implementación. La ecuación general del PID es la siguiente, 212\* MERGEFORMAT (.) La función es el error entre la salida deseada o punto de ajuste y la salida actual del proceso. Como se observa el PID hace una ponderación del error de seguimiento, de la integral del error de seguimiento y de la derivada del error de seguimiento. Estas ponderaciones son las que lo hacen tan versátil en el control de procesos. La ponderación del error hace robusto al controlador frente a posibles ruidos: La ponderación de la integral del error reduce el error en estado estacionario a cero. La ponderación de la derivada del error hace que el error tienda a cero más rápidamente. La función es la señal de control calculada por el PID y que se aplicará al proceso (incluidos amplificadores, actuadores y planta). La función de transferencia del controlador es la siguiente, 313\* MERGEFORMAT (.) donde y .
-
Upload
jeisson-octavio-bravo-neira -
Category
Documents
-
view
222 -
download
4
description
Tal vez el controlador más conocido tanto en el nivel académico como en el nivel industrial es el PID esto se debe a su estructura flexible y a su relativamente fácil implementación.
Transcript of Discretización PID.docx

111Equation Chapter 1 Section 1DISCRETIZACIÓN DEL PID1) Introducción
Tal vez el controlador más conocido tanto en el nivel académico como en el nivel industrial es el PID esto se debe a su estructura flexible y a su relativamente fácil implementación.
La ecuación general del PID es la siguiente,
212\* MERGEFORMAT (.)
La función es el error entre la salida deseada o punto de ajuste y la salida actual del proceso.
Como se observa el PID hace una ponderación del error de seguimiento, de la integral del error de seguimiento y de la derivada del error de seguimiento. Estas ponderaciones son las que lo hacen tan versátil en el control de procesos.
La ponderación del error hace robusto al controlador frente a posibles ruidos:
La ponderación de la integral del error reduce el error en estado estacionario a cero. La ponderación de la derivada del error hace que el error tienda a cero más rápidamente.
La función es la señal de control calculada por el PID y que se aplicará al proceso (incluidos amplificadores, actuadores y planta).
La función de transferencia del controlador es la siguiente,
313\* MERGEFORMAT (.)
donde y .
Esta función de transferencia es impropia ya que el grado del polinomio del denominador es menor que el grado del polinomio del numerador. Esto se debe principalmente al término del
derivador de la señal del error . Para salvar este problema se puede aproximar el término derivador por una función de transferencia,
414\* MERGEFORMAT (.)
Esta función de transferencia aproxima la derivada a bajas frecuencias, pero la ganancia se
limita por a las altas frecuencias. se debe seleccionar típicamente en el rango de 3 a 20.
Con esto la función de transferencia del PID (pseudo-derivativo) queda,

515\* MERGEFORMAT (.)
612Equation Chapter (Next) Section 172Equation Section (Next)
2) Discretización del PID
La discretización del PID se puede hacer de diferentes formas:
a) Aplicando la aproximación de Tustin
Si
entonces,
828\* MERGEFORMAT (.)
donde,
929\* MERGEFORMAT (.)
El PID teórico se obtiene cuando hacemos . Para este caso tenemos,

10210\* MERGEFORMAT (.)
De la función de transferencia en tiempo discreto podemos obtener una ecuación recursiva para su implementación en un procesador digital,
11211\* MERGEFORMAT (.)
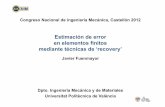
Esta estructura permite implementar el PID en forma de un filtro digital en un procesador digital,
Figura 1. Diagrama de flujo del controlador PID.
12212\* MERGEFORMAT (.)
En el dominio del tiempo tenemos,

La implementación de este algoritmo en un procesador digital se logra resolviendo la ecuación de forma recursiva,
13213\* MERGEFORMAT (.)
para .
b) Métodos numéricos
Comenzaremos por discretizar el PID teórico utilizando aproximaciones numéricas de los términos integrales y derivativos,
tomando ,
14214\* MERGEFORMAT (.)
de forma recursiva tenemos,
de aquí tenemos,
Por otro lado tenemos,

El término puede aproximarse muy bien de forma numérica,
por tanto,
15215\* MERGEFORMAT (.)
Por otro lado,
16216\* MERGEFORMAT (.)
esta aproximación no es muy válida si el periodo no es lo suficientemente pequeño en
comparación con la variación de ,
17217\* MERGEFORMAT (.)
Reemplazando las ecuaciones 215, 216 y 217 en la ecuación 214,
Agrupando términos tenemos,

18218\* MERGEFORMAT (.)
Aplicando la transformada a la ecuación 218 obtenemos,
con .
19219\* MERGEFORMAT (.)
En tiempo continuo la ley de control queda,
20220\* MERGEFORMAT (.)
y así sucesivamente.
Considerando el diagrama de flujo de la Figura 1 tendremos y , y los términos
, y según la ecuación 218.