Dinámica de Sistemas Físicos - T2€¦ · Dinámica de Sistemas Físicos - T2 Contenido 1...
100
Dinámica de Sistemas Físicos - T2 (T 1, ) n m N Profesora: Dra. Lizeth Torres [email protected] http://lizeth-torres.info/ 30th April 2020 Facultad de Ingeniería, Universidad Nacional Autónoma de México.
Transcript of Dinámica de Sistemas Físicos - T2€¦ · Dinámica de Sistemas Físicos - T2 Contenido 1...

Dinámica de Sistemas Físicos - T2(Tema 1, 2018)n mN
Profesora: Dra. Lizeth Torres
http://lizeth-torres.info/
30th April 2020
Facultad de Ingeniería, Universidad Nacional Autónoma de México.

Dinámica de Sistemas Físicos - T2
Contenido
Lizeth Torres | 30th April 2020 2 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er orden
Se caracterizan principalmente por tener un elemento capaz de almacenar energía.
Un sistema de 1er orden LIT se representa por un modelo matemático de la forma
a1dx(t)dt
+ a0x(t) = f (t).
Normalizando con respecto a la derivada de mayor orden, se tiene:
dx(t)dt
+a0
a1x(t) =
1a1f (t).
Haciendo las siguientes asignaciones:
b0 =a0
a1, b1 =
1a1,
entonces el modelo se expresa de la forma:
dx(t)dt
+ b0x(t) = b1f (t).
Lizeth Torres | 30th April 2020 3 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er orden
dx(t)dt
+ b0x(t) = b1f (t).
donde:b0: es la frecuencia natural del sistema.b1: es el factor que afecta la excitación externa o entrada aplicada al sistema.f (t): es la excitación externa o entrada aplicada al sistema.x(t): es la variable de estudio o interés del sistema considerado.
Lizeth Torres | 30th April 2020 4 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenTipos de respuesta
La respuesta de un sistema depende de sus características propias, su estadoinicial y la excitación externa o entrada aplicada a éste.
La respuesta completa o total y(t) de un sistema diferencial LIT consiste dedos soluciones.
y(t) = yci(t) + yu(t)
Los tipos de respuesta con base en las condiciones mencionadas son:
Libre
Forzada
Total
Permanente
Transitoria
Lizeth Torres | 30th April 2020 5 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenTipos de respuesta
Respuesta libre: yci(t)Es aquella que produce el sistema cuando la entrada o excitación externaaplicada es cero y su estado inicial es diferente a cero.
yci(t): es la solución homogénea, llamada también respuesta natural, respuesta libre,o respuesta de entrada cero. Esta respuesta se debe exclusivamente a las energíasalmacenadas en los elementos del sistema.
Lizeth Torres | 30th April 2020 6 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenTipos de respuesta
Respuesta forzada: yu(t)Es aquélla que produce el sistema cuando la entrada o excitación externaaplicada a éste es distinta de cero y su estado inicial es nulo.
yu(t): es la respuesta de la ecuación diferencial no homogénea debida a una entradaparticular y se le conoce como solución particular, respuesta forzada o respuesta deestado cero, dado que las energías en los elementos se consideran cero.
Lizeth Torres | 30th April 2020 7 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenTipos de respuesta
Respuesta permanenteEste tipo de respuesta, denominada también respuesta en estado estable, esla que produce el sistema después de que ha transcurrido un cierto tiempo(generalmente grande). Se obtiene aplicando la expresión:
yper(t) = limt→∞
y(t)
La respuesta permanente depende de la entrada aplicada al sistema, de su estadoinicial y de tiempos grandes.
Lizeth Torres | 30th April 2020 8 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenTipos de respuesta
Respuesta transitoriaEs aquella que produce el sistema antes de alcanzar su estado estable; porotra parte se tiene que la respuesta total es la suma algebraica de lapermanente y la transitoria, esto es:
y(t) = ytran(t) + yper(t)
La respuesta transitoria depende de la excitación externa aplicada y el estado inicialdel sistema.
Lizeth Torres | 30th April 2020 9 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
R1 = 0.5 Ω; R2 = 10 Ω; L = 500 mH; i(t) = 50 + 10 sin (t) A; iL(0) = 5 A.
Lizeth Torres | 30th April 2020 10 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 1
Sustituyendo los valores, se tiene la siguiente ecuación diferencial:
diLdt
+ 21iL = 50 + 10 sin (t)
Renombrando a iL como x, la ecuación previa se reescribe así
dxdt
+ 21x = 50 + 10 sin (t)
Respuesta Librex = K1e−21t
x(0) = K1e−21(0) = 5
xlib = 5e−21t
Lizeth Torres | 30th April 2020 11 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 1
Respuesta permanente
x = k3 + k4 cos (t) + k5 sin (t)
x = −k4 sin (t) + k5 cos (t)
Sustituyendo las dos ecuaciones de arriba en la ecuación diferencial
x + 21x = 50 + 10 sin (t),
se tiene
−k4 sin (t) + k5 cos (t) + 21k3 + 21k4 cos (t) + 21k5 sin (t) = 50 + 10 sin (t)
Factorizando con respecto a cos (t), sin (t) y los valores constantes, se tiene
Lizeth Torres | 30th April 2020 12 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 1
21k3 + cos (t)(21k4 + k5) + sin (t)(−k4 + 21k5) = 50 + 10 sin (t)
Utilizando los factores para formar un sistema de ecuaciones algebraicas setiene
21k4 + k5 = 0−k4 + 21k5 = 10
21k3 = 50
k3 = 2.3810, k4 = −0.0226, k5 = 0.4751.
La respuesta permanente se lee
xper = 2.3810− 0.0226 cos (t) + 0.4751 sin (t)
Lizeth Torres | 30th April 2020 13 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 1
Respuesta ForzadaPara calcular la respuesta forzada se suma la respuesta libre más la respuestapermanente, pero k1 se vuelve a calcular en el instante t = 0 considerandoque la C.I x(0) = 0.
x(0) = k1e−21(0) + 2.3810− 0.0226 cos (0) + 0.4751 sin (0)
0 = k1 + 2.3810− 0.0226
k1 = −2.3810 + 0.0226 = −2.3584
xfor = −2.3584e−21t + 2.3810− 0.0226 cos (t) + 0.4751 sin (t)
Lizeth Torres | 30th April 2020 14 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 1
Respuesta TotalLa respuesta total es la suma de la respuesta libre + la respuesta forzada, i.e.
xtot = 5e−21t − 2.3584e−21t + 2.3810− 0.0226 cos (t) + 0.4751 sin (t)
xtot = 2.6416e−21t + 2.3810− 0.0226 cos (t) + 0.4751 sin (t)
Respuesta Transitoria
xtran = 2.6416e−21t + 2.3810
Lizeth Torres | 30th April 2020 15 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
M = 600 Kg; B = 3000 Ns/m; f (t) = 600 N; v(0) = 1 m/s.
Lizeth Torres | 30th April 2020 16 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 2Sustituyendo los valores, se tiene la siguiente ecuación diferencial:
dvdt
+ 5v = 1
Respuesta Libre
vlib = k1e−5t
vlib = e−5t
Respuesta Permanentev = k2
v = 0Sustituyendo las dos ecuaciones de arriba en la ecuación diferencial, se tiene
5k2 = 1
k2 = 1/5 = 0.2vper = 0.2
Lizeth Torres | 30th April 2020 17 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 2
Respuesta ForzadaPara calcular la respuesta forzada se suma la respuesta libre más la respuestapermanente, pero k1 se vuelve a calcular en el instante t = 0 considerandoque la C.I v(0) = 0.
v(0) = k1e−5t + 0.2 = 0
k1 = −0.2
vfor = 0.2− 0.2e−5t
Respuesta Totalvtot = e−5t + 0.2− 0.2e−5t = 0.2 + 0.8e−5t
Lizeth Torres | 30th April 2020 18 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
J = 8 Nm/(rad/s2); Bθ = 1.5 Nm/(rad/s); T(t) = 600 sin (t) Nm; ω(0) = 10.5rad/s.
Lizeth Torres | 30th April 2020 19 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
Tipo de entrada: periódica con oset.Método recomendado: coeficientes indeterminados .
SOLUCIÓN
Respuesta libre (respuesta de entrada cero):
dωdt
+BθJω =
1J
600 sin (t)
dωdt
+ 0.1875ω = 75 sin (t)
Polo: −0.1875 =⇒ ωci = K1e−0.1875t
Evaluando ωci en t = 0 se tiene que
ωci(0) = K1e(−0.1875(0)) = 10.5 =⇒ K1 = 10.5
ωci = 10.5e−0.1875t
Lizeth Torres | 30th April 2020 20 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
Tipo de entrada: periodica sin oset.Método recomendado: coeficientes indeterminados .
SOLUCIÓN
Respuesta libre (respuesta de entrada cero):
dωdt
+BθJω =
1J
600 sin (t)
dωdt
+ 0.1875ω = 75 sin (t)
Polo: −0.1875 =⇒ ωci = K1e−0.1875t
Evaluando ωci en t = 0 se tiene que
ωci(0) = K1e(−0.1875(0)) = 10.5 =⇒ K1 = 10.5
ωci = 10.5e−0.1875t
Lizeth Torres | 30th April 2020 21 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
Respuesta permanente:Nota: Dado que la entrada exógena del sistema es periodica, la respuesta permanente también será
periodica.
Se propone una solución:
ωper = K2 sin (t) + K3 cos (t)
cuya derivada esdωper
dt= K2 cos (t)− K3 sin (t).
Tanto la solución propuesta como su derivada se sustituyen en la ecuacióndiferencial de primer orden para obtener la siguiente relación
K2 cos (t)− K3 sin (t) + 0.1875K2 sin (t) + 0.1875K3 cos (t) = 75 sin (t),
la que factorizada con respecto al seno y coseno se expresa así:
cos (t)(K2 + 0.1875K3) + sin (t)(0.1875K2 − K3) = 75 sin (t).
Lizeth Torres | 30th April 2020 22 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
A partir de la expresión anterior se formula el siguiente sistema de ecuacionesalgebraicas:
K2 + 0.1875K3 = 0,0.1875K2 − K3 = 75 sin (t),
cuya solución es K2 = 13.58 y K3 = −72.45, de tal manera que la respuestapermanente es:
ωper = 13.58 sin (t)− 72.45 cos (t)
Lizeth Torres | 30th April 2020 23 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
Respuesta forzada:Se vuelve a clacular K1 pero considerando la respuesta permanente y lacondición inicial igual a cero, i.e,
ω(0) = K1e−0.1875(0) + 13.58 sin (0)− 72.45 cos (0) = 0 =⇒ K1 = 72.45
La respuesta forzada sera
ωu = 72.45e−0.1875t + 13.58 sin (t)− 72.45 cos (t)
Respuesta total:La respuesta total es la suma de la respuesta libre y la respuesta forzada,entonces:
ω = 82.95e−0.1875t + 13.58 sin (t)− 72.45 cos (t)
Respuesta transitoria
ωtrans = 82.95e−0.1875t
Lizeth Torres | 30th April 2020 24 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
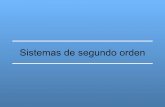
Ejercicio 3
Lizeth Torres | 30th April 2020 25 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
0 20 40 60 80 1000
2
4
6
8
10
12
Respuesta Libre
0 20 40 60 80 100-100
-50
0
50
100
150
Respuesta Forrzada
0 20 40 60 80 100-100
-50
0
50
100
150
Respuesta Total
0 20 40 60 80 100-100
-50
0
50
100
150
Respuesta Total
Respuesta Transitoria
Respuesta Permanente
Lizeth Torres | 30th April 2020 26 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
RH1 = 4× 105 Pa.s/m; RH2 = 5× 105 Pa.s/m; γ = 9.81× 103 Kg/m2.s2; A = 9m2; q(t) = 0.2 + 0.155 sin (t) m3/s; h(0) = 0.5 m.
Lizeth Torres | 30th April 2020 27 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er ordenEjercicios: Tipos de respuesta
K = 14× 103 W/K; RT = 1× 10−4 K/W; CT = 42× 106 W.s/K;Q(t) = 8× 106 W; T(0) = 290 K
Lizeth Torres | 30th April 2020 28 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 4
x + b0x = a0 +
n∑k=1
(ak cos (kωt) + bk sin (kωt)) , x(0) = x0
Respuesta Libre
xlib = x0e−b0t
Respuesta PermanenteSe propone la siguiente solución:
x = A0 +
n∑k=1
(Ak cos (kωt) + Bk sin (kωt)) ,
cuya derivada es la siguiente:
x =
n∑k=1
(−kωAk sin (kωt) + kωBk cos (kωt)) .
Lizeth Torres | 30th April 2020 29 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 4
Sustituyendo x y x en la ecuación diferencial de primer orden, se tiene(
n∑k=1
(−kωAk sin (kωt) + kωBk cos (kωt))
)+ b0
(A0 +
n∑k=1
(Ak cos (kωt) + Bk sin (kωt))
)=
= a0 +n∑
k=1
(ak cos (kωt) + bk sin (kωt))
Factorizando, la ecuación diferencial deviene
b0A0 +
(n∑
k=1
cos (kωt)
)(n∑
k=1
(kωBk + b0Ak)
)+
(n∑
k=1
sin (kωt)
)(n∑
k=1
(−kωAk + b0Bk)
)=
= a0 +n∑
k=1
(ak cos (kωt) + bk sin (kωt))
Lizeth Torres | 30th April 2020 30 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 4Con los factores se forma un conjunto de sub-sistemas de ecuacionesalgebraicas, i.e.
b0A0 = a0
kωB1 + b0A1 = a1
b0B1 − ωA1 = b1
kωB2 + b0A2 = a2
b0B2 − ωA2 = b2... =
...
kωBn + b0An = anb0Bn − ωAn = bn
Resolviendo los subsistemas, se tienen la siguientes soluciones
A0 = a0/b0 = α0,A1 = α1,B1 = β1,A2 = α2, β2 = β2, . . . ,An = αn, βn = βn
Lizeth Torres | 30th April 2020 31 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 4La respuesta permanente es entonces:
xper = α0 +
n∑k=1
(αk cos (kωt) + βk sin (kωt)) .
Respuesta Forzada
0 = K1e−b0(0) + α0 +
n∑k=1
(αk cos (kω(0)) + βk sin (kω(0))) .
0 = K1 + α0 +
n∑k=1
(αk) .
K1 = −α0 −n∑
k=1
αk.
xfor = K1e−b0t + α0 +
n∑k=1
(αk cos (kωt) + βk sin (kωt)) .
Lizeth Torres | 30th April 2020 32 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Ejercicio 4
xfor =
(−α0 −
n∑k=1
αk
)e−b0t + α0 +
n∑k=1
(αk cos (kωt) + βk sin (kωt)) .
Respuesta Total
xtot = x0e−b0t−
(α0 +
n∑k=1
αk
)e−b0t+α0+
n∑k=1
(αk cos (kωt) + βk sin (kωt)) .
Tarea:
4x + 5x = 4 + 2 cos (3t) + sin (3t) + 6 cos (6t)− 8 sin (6t)
Lizeth Torres | 30th April 2020 33 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalón
La respuesta escalón tiene aplicaciones en el análisis y diseño de sistemasdinámicos.
La respuesta escalón puede resolverse en el dominio del tiempo (método desolución de coeficientes indeterminados) y en el de la frecuencia (método detransformada de Laplace).
Lizeth Torres | 30th April 2020 34 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalón
La respuesta escalón de un sistema se puede obtener si se satisfacen lassiguientes condiciones:
El estado inicial del sistema es nulo.
La entrada o excitación externa aplicada al sistema es una funciónescalón, i.e. u(t).
Lizeth Torres | 30th April 2020 35 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalónEjemplo: Obtener la respuesta escalón del siguiente sistema eléctrico.
El modelo matemático del sistema es:
VC +
(1
C(R1 + R2)
)VC =
(R1
C(R1 + R2)
)i(t)
La solución homogénea está dada por las ecuación:
V hC = K1e
−(
1C(R1+R2)
)t
Lizeth Torres | 30th April 2020 36 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalónDebido a que la entrada i(t) es una función escalón, la solución particularque se propone es de la forma:
V pC = K2
cuya derivada esV pC = 0
Sustituyendo V pC , V p
C e i(t) en la ecuación diferencial, se obtiene
0 +
(K2
C(R1 + R2)
)=
(R1
C(R1 + R2)
)lo que da
K2 = R1
Por lo tanto la solución particular está dada por:
V pC = R1
Lizeth Torres | 30th April 2020 37 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalónLa solución general de la ecuación diferencial es
VC(t) = K1e−(
1C(R1+R2)
)t+ R1
Para obtener la respuesta escalón del sistema es necesario evaluar laconstante K1, a partir de las condiciones iniciales, que en este caso son cero,por lo que:
VC(0) = 0 = K1e−(
1C(R1+R2)
)(0)
+ R1
0 = K1 + R1
K1 = −R1
Sustituyendo el valor de K1 en la solución general, se tiene
VC(t) = −R1e−(
1C(R1+R2)
)t+ R1
Sustituyendo los valores de R1, R2 y C en la solución general, se tieneVC(t) = 100(1− e−0.01t) t ≥ 0
Lizeth Torres | 30th April 2020 38 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalón
La respuesta escalón de un sistema de 1er orden se puede expresar en formageneral como
yu(t) = K(1− e−mt) t ≥ 0
dondeyu(t): es la respuesta escalón.K : es el valor final que alcanza la respuesta escalón.m: es la frecuencia natural del sistema.
Lizeth Torres | 30th April 2020 39 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta escalón
Un concepto que se puede obtener a partir de la respuesta escalón, es elreferente a la constante de tiempo del sistema. Esta se define como el tiemponecesario para que la respuesta escalón de un sistema de primer ordenadquiera el 63.2 % de su valor final.
τ =1m
Lizeth Torres | 30th April 2020 40 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta al impulso
La respuesta al impulso h(t) de un sistema se puede obtener si se satisfacenlas siguientes condiciones:
El estado inicial del sistema es nulo
La excitación externa o entrada aplicada al sistema es una funciónimpulso δ(t).
Lizeth Torres | 30th April 2020 41 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta al impulso
La respuesta al impulso es importante, ya que a partir de ésta se puedeobtener la respuesta del sistema para cualquier entrada. Asimismo se puedepuede establecer la relación salida - entrada del sistema (función detransferencia).
y(t) =
∫ ∞−∞
x(τ)h(t − τ)dτ
Lizeth Torres | 30th April 2020 42 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta al impulso
La respuesta al impulso de un sistema se puede obtener derivando larespuesta escalón, esto es:
h(t) =dyu(t)dt
Dado queyu(t) = K(1− e−mt) t ≥ 0
entoncesyu = h(t) = Ke−mt
Lizeth Torres | 30th April 2020 43 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de primer orden
Sistemas de 1er Orden - Respuesta al impulsoEjemplo: Calcula respuesta al impulso del siguiente sistema.
La respuesta escalón está dada por:
iu(t) = − R1
R1 + R2e−(
R1+R2L
)t+
R1
R1 + R2t ≥ 0
Derivando la respuesta al escalón se obtiene:
diu(t)dt
= h(t) =R1
Le−(
R1+R2L
)t t ≥ 0
Lizeth Torres | 30th April 2020 44 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do orden
Los sistemas de segundo orden se caracterizan por contener dos elementoscapaces de almacenar energía y se pueden modelar matemáticamenteutilizando la siguiente ecuación diferencial:
a2d2x(t)dt
+ a1dx(t)dt
+ a0x(t) = g(t),
la cual puede expresarse en forma normalizada con respecto al coeficiente dela derivada de mayor orden como:
d2x(t)dt
+a1
a2
dx(t)dt
+a0
a2x(t) =
1a2g(t).
Definiendo los coeficientes de la forma: a1/a2 = b1, a0/a2 = b0 y 1/a2 = c0,se tiene
Lizeth Torres | 30th April 2020 45 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de segundo orden
d2x(t)dt
+ b1dx(t)dt
+ b0x(t) = c0g(t).
Debido a que la ecuación característica de una ecuación diferencial desegundo orden es una ecuación cuadrática de la forma:
m2 + b1m + b0 = 0
existen dos valores de m que la satisfacen, esto es, la ecuación tiene dos raícesy están dadas por:
m1 =−b1 +
√b2
1 − 4b0
2
m2 =−b1 −
√b2
1 − 4b0
2Los coeficientes b1 y b0 están definidos por las expresiones:
b1 = 2α, b0 = ω2n, α = ξωn
Lizeth Torres | 30th April 2020 46 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de segundo orden
α : es la constante de amortiguamiento del sistema.ωn : es la velocidad angular no amortiguada del sistema.ξ : es el factor de amortiguamiento relativo del sistema.Sustituyendo α, ωn y ξ en las soluciones se tiene
m1,2 = −α± ωn√α2 − ω2
n,
m1,2 = −ξωn ± ωn√ξ2 − 1.
Lizeth Torres | 30th April 2020 47 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de segundo orden
Puesto que son dos valores de m que satisfacen a la ecuación de 2do orden,existen cuatro posibles casos para las raíces, éstos son:
1 Raíces reales diferentes (b21 > 4b0) (α > ωn ó ξ > 1) =⇒
Comportamiento sobreamortiguado
2 Raíces reales iguales (b21 = 4b0) (α = ωn ó ξ = 1) =⇒ Comportamiento
criticamente amortiguado
3 Raíces complejas (b21 < 4b0) (α < ωn ó 0 < ξ < 1) =⇒
Comportamiento subamortiguado
4 Raíces imaginarias (b1 = 0) (α = 0 ó ξ = 0) =⇒ Comportamiento noamortiguado
Lizeth Torres | 30th April 2020 48 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de Segundo Orden
Lizeth Torres | 30th April 2020 49 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de Segundo Orden
Lizeth Torres | 30th April 2020 50 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de segundo orden
Comportamiento sobreamortiguado:
x(t) = K1em1t + K2em2t
Comportamiento críticamente amortiguado:
x(t) = (K1 + K2t)emt
Comportamiento subamortiguado:
x(t) = eαt(K1 cos (βt) + K2 sin (βt))
Comportamiento no amortiguado: x(t) = K1 cos (βt) + K2 sin (βt)
β es la parte imaginaria de una raiz compleja.
Lizeth Torres | 30th April 2020 51 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
x(t) + b1x(t) + b0x(t) = g(t)
Las condiciones iniciales del sistema son: x(0) = 0, x(0) = 1. La excitaciónexterna es: g(t) = (b0 − 1) sin (t). Los valores de los coeficientes son:a) b1 = 5, b0 = 6.
Sustituyendo valores se tiene
x(t) + 5x(t) + 6x(t) = 5 sin (t)
La ecuación característica está dada por
m2 + 5m + 6 = 0
cuyas soluciones (polos), obtenidas vía la ecuación chicharronera, son:
m1 = −2,m2 = −3
Lizeth Torres | 30th April 2020 52 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
Dado que las raíces son reales y distintas, la solución homogénea del sistemao respuesta libre está dada por:
x libre(t) = K1e−2t + K2e−3t
Para obtener el valor de los coeficientes K1 y K2, se deriva la soluciónhomogénea.
x libre(t) = −2K1e−2t − 3K2e−3t
Después, la solución y su derivada son evaluadas en cero e igualadas a lascondiciones iniciales.
x libre(0) = K1e−2(0) + K2e−3(0) = K1 + K2 = 0
x libre(0) = −2K1e−2(0) − 3K2e−3(0) = −2K1 − 3K2 = 1
Lizeth Torres | 30th April 2020 53 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
Finalmente, se resuelve el sistema de ecuaciones algebraicas resultante de laevaluación de las condiciones iniciales.
K1 = 1,K2 = −1
La respuesta libre de acuerdo a las condiciones iniciales es:
x libre(t) = e−2t − e−3t
Lizeth Torres | 30th April 2020 54 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
Respuesta permanenteDebido a que la excitación es una función senoidal, la solución que sepropone es:
xperm(t) = K3 sin (t) + K4 cos (t)
derivando la solución propuesta (tantas veces como el orden de la ecuacióndiferencial), se tiene
xperm(t) = K3 cos (t)− K4 sin (t),
xperm(t) = −K3 sin (t)− K4 cos (t).
Tanto la solución propuesta como sus derivadas se sustituyen en la ecuacióndiferencial de la siguiente manera:
(5K3 − 5K4) sin (t) + (5K3 + 5K4) cos (t) = 5 sin (t)
Lizeth Torres | 30th April 2020 55 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
A partir de la factorización de la ecuación anterior se obtiene el siguientesistema de ecuaciones algebráicas:
K3 − K4 = 1,
K3 + K4 = 0,
cuya solución es: K3 = 0.5 y K4 = −0.5. Así pues, la solución particular estádada por la siguiente ecuación:
xperm(t) = 0.5 sin (t)− 0.5 cos (t)
Lizeth Torres | 30th April 2020 56 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistema de 2do orden
Respuesta forzada
xforz(t) = K1e−2t + K−3t2 + 0.5 sin (t)− 0.5 cos (t)
xforz(0) = K1e−2(0) + K−3(0)2 + 0.5 sin (0)− 0.5 cos (0)
0 = K1 + K2 − 0.5
K1 + K2 = 0.5
xfor(t) = −2K1e−2t − 3K2e−3t + 0.5 cos (t) + 0.5 sin (t)
xfor(0) = −2K1e−2(0) − 3K2e−3(0) + 0.5 cos (0) + 0.5 sin (0)
0 = −2K1 − 3K2 + 0.5
−2K1 − 3K2 = −0.5
Lizeth Torres | 30th April 2020 57 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistema de 2do Orden
K1 = 1,K2 = −0.5
xforz(t) = e−2t − 0.5e−3t + 0.5 sin (t)− 0.5 cos (t)
xtotal(t) = e−2t − e−3t + e−2t − 0.5e−3t + 0.5 sin (t)− 0.5 cos (t)
xtotal(t) = 2e−2t − 1.5e−3t + 0.5 sin (t)− 0.5 cos (t)
La respuesta transitoria es:
xtran(t) = 2e−2t − 1.5e−3t
Las respuesta total también puede calcularse directamente de la respuestalibre y permanente. Se calcula igual que la forzada, pero en lugar deconsiderar condiciones iniciales nulas se usan los valores de las condicionesiniciales.
Lizeth Torres | 30th April 2020 58 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
Respuesta totalPara obtener la respuesta total, se suma a la respuesta libre (sin loscoeficientes evaluados) y la respuesta permanente, esto es
xtotal(t) = K1e−2t + K2e−3t + 0.5 sin (t)− 0.5 cos (t)
Para evaluar K1 y K2 es necesario derivar la ecuación anterior y emplear lascondiciones iniciales del sistema:
xtotal(t) = −2K1e−2t − 3K2e−3t + 0.5 cos (t) + 0.5 sin (t)
Sustituyendo las condiciones iniciales, se obtiene un sistema de ecuacionessimultaneas para evaluar K1 y K2, esto es:
Lizeth Torres | 30th April 2020 59 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Solución de un sistema de segundo orden
K1 + K2 = 0.5
−2K3 − 3K2 = 0.5
Resolviendo el sistema de ecuaciones, se obtiene que los valores de K1 y K2son:
K1 = 2
K2 = −1.5
Así pues la solución general o respuesta total del sistema está descrita por lasiguiente ecuación:
xtotal(t) = 2e−2t − 1.5e−3t + 0.5 sin (t)− 0.5 cos (t)
Lizeth Torres | 30th April 2020 60 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Respuesta escalónPara obtener la respuesta escalón es necesario que el estado inicial delsistema sea nulo y que la excitación externa aplicada sea la función escalónunitario.
La respuesta escalón de un sistema de segundo orden varía de acuerdo con elfactor de amortiguamiento relativo, por lo tanto es posible hacer gráficasnormalizadas para diferentes valores de dicho factor.
Lizeth Torres | 30th April 2020 61 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do Orden - Respuesta al escalón
Ejemplo: Calcular la respuesta al escalón del siguiente sistema empleandocomo variable el voltaje en el capacitor VC .
El modelo matemático del sistema es:
VC(t) +RLVC(t) +
1LC
VC(t) =1LC
V (t)
Sustituyendo los valores de R, L, C y V (t), se tiene
VC(t) + 200VC(t) + 10000VC(t) = 10000u(t)
Lizeth Torres | 30th April 2020 62 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do Orden - Respuesta al escalónLos polos del sistema son: m1 = −100 y m2 = −100 por lo tanto la soluciónhomogénea es:
V hC(t) = K1e−100t + K2te−100t
Debido a que la función escalón unitario se puede considerar como unaconstante para t ≥ 0, la solución particular que se propone es:
V pC(t) = K3,
cuya derivada y doble derivada son, respectivamente
V pC(t) = 0
V pC(t) = 0
Sustituyendo V pC(t) y sus derivadas en la ecuación de segundo orden, así
como u(t) = 1 t ≥ 0 se tiene
0 + 200(0) + 10000K3 = 10000(1) =⇒ K3 = 1
Lizeth Torres | 30th April 2020 63 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do Orden - Respuesta al escalón
La solución particular es entonces:
V pC(t) = 1
Sumando la solución homogénea y la solución particular se obtiene lasolución general, que en este caso es la respuesta al escalón, esto es
VC(t) = K1e−100t + K2te−100t + 1
Para encontrar las constante K1 y K2, se requiere derivar la solución general,esto es
VC(t) = −100K1e−100t + K2e−100t − 100K2te−100t
Lizeth Torres | 30th April 2020 64 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do Orden - Respuesta al escalón
Evaluando VC(t) y su derivada en t = 0 considerando que VC(0) = 0 yVC(0) = 0, se tiene
VC(0) = 0 = K1e−100(0) + K2(0)e−100(0) + 1
K1 + 1 = 0 =⇒ K1 = −1
VC(0) = 0 = −100K1e−100(0) + K2e−100(0) − 100K2(0)e−100(0)
−100K1 + K2 = 0
−100(−1) + K2 = 0 =⇒ K2 = −100
Por lo tanto la respuesta al escalón es:
VC(t) = 1− e−100t − 100te−100t t ≥ 0
Lizeth Torres | 30th April 2020 65 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Sistemas de 2do Orden - Respuesta al impulso
La respuesta al escalón de un sistema de segundo orden es:
VC(t) = 1− e−100t − 100te−100t t ≥ 0
Entonces su respuesta al impulso es h(t) = VC(t), que explícitamente se lee:
h(t) = 100e−100t + 10000te−100t − 100e−100t t ≥ 0
h(t) = 10000te−100t t ≥ 0
Lizeth Torres | 30th April 2020 66 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Parámetros de diseño
A partir de la respuesta escalón, se pueden determinar algunas característicasdel sistema que, en el estudio y análisis de sistemas dinámicos, han sidodenominadas como parámetros de diseño, ya que reflejan la rapidez con laque el sistema responde.
Los parámetros de diseño son:
Tiempo de retardo
Tiempo de levantamiento
Sobrepaso
Tiempo de sobrepaso
Tiempo de asentamiento
Lizeth Torres | 30th April 2020 67 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Parámetros de diseño
Tiempo de retardoEs el tiempo necesario para que la respuesta escalón del sistema alcance el50% de su valor final y se representa por tr .
Tiempo de levantamientoSe define como el tiempo que transcurre desde que la respuesta escalón delsistema adquiere el 10% de su valor final hasta el tiempo en el que larespuesta escalón adquiere el 90% de su valor final y se representa por t`
Lizeth Torres | 30th April 2020 68 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Parámetros de diseño
SobrepasoEs la máxima desviación que alcanza el valor de la respuesta escalón delsistema sobre su valor final o valor en estado estable y se representamediante Mp.
Tiempo de sobrepasoEs el tiempo en el cual la respuesta escalón del sistema alcanza su valormáximo o sobrepaso y se representa por tp.
Tiempo se asentamientoEs el tiempo mínimo en el que la respuesta escalón del sistema tienevariaciones entre el 90% y 105% de su valor final y se representa mediante ta.
Lizeth Torres | 30th April 2020 69 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Parámetros de diseño
Lizeth Torres | 30th April 2020 70 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de segundo orden
Parámetros de diseño
Comportamiento sobreamortiguado:L = 500 mH; C = 220 µF; R = 68 Ω; V (t) = 120 U (t − tu) V
Lizeth Torres | 30th April 2020 71 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Sistemas de orden superior
1 La respuesta libre de los sistemas de tercero y órdenes superiores constade una suma de términos, uno por cada polo.
2 Por cada polo diferente existe un término exponencial real en larespuesta natural del sistema.
3 Por cada par de polos complejos conjugados, existe un par de términoscomplejos, los cuales pueden expresarse mejor mediante el producto deuna exponencial y una senoide.
4 Los polos repetidos proporcionan términos adicionales que contienenpotencias del tiempo multiplicadas por la exponencial.
5 Los parámetros de diseño también son representaciones útiles de lossistemas de orden superior.
Lizeth Torres | 30th April 2020 72 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Sistemas de orden superior
Un sistema de orden N , LIT y SISO tiene la siguiente forma:
N∑n=0
an(t)dny(t)dtn
=
M∑m=0
bm(t)dmu(t)dtn
aNdN y(t)
dtN+ aN−1
dN − 1y(t)
dtN−1+ ... + a1
dy(t)
dt+ a0y(t) = bM
dMu(t)
dtM+ bM−1
dM − 1u(t)
dtM−1+ ... + b1
du(t)
dt+ b0u(t)
Ejemplo: a2y(t) + a1y(t) + a0 = b1u(t) + b0u(t).
La forma general de la solución homogénea de la ecuación diferencial deorden N con η polos distintos y N − η polos múltiples es
yh(t) =
η∑i=1
Ciepit +N∑
i=η+1Citi−N−1epit
Lizeth Torres | 30th April 2020 73 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Función de transferencia
La dinámica de un sistema de orden N puede expresarse como una funciónde transferencia:
G(s) =Y(s)X(s)
=bMsM + bM−1sM−1 + ...+ b0
aN sN + aN−1sN−1 + ...+ a0
donde Y(s) es la salida del sistema y U (s) es la entrada.
El denominador es un polinomio en n que es conocido como ecuacióncaracterística o polinomio característico.
Las raíces del denominador se conocen como polos.Las raíces del numerador son denominados ceros del sistema.
Lizeth Torres | 30th April 2020 74 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Función de transferencia
Factorizando el numerador y denominador se obtiene:
G(s) =
(bMaN
)(s − z1)(s − z2)...(s − zM)
(s − p1)(s − p2)...(s − pN )
dondezi=ceros de la función de transferencia.pi=polos de la función de transferencia.
Lizeth Torres | 30th April 2020 75 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Función de transferencia
Las raíces de la ecuación característica, los polos, deben ser reales o debenocurrir como pares de complejos conjugados.
Estabilidad de un sistema evaluando sus polosLas partes reales de todos los polos deben ser negativas para que el sistemasea estable.
Los ceros afectan la respuesta dinámica del sistema, pero no afectan suestabilidad.
Lizeth Torres | 30th April 2020 76 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Sistemas de orden superior
Se dice que una función de transferencia es propia si su grado relativo esmayor o igual a cero, y estrictamente propia si el grado relativo es mayor oigual a uno.
Se dice que una función es propia si el orden del polinomio característico esmayor que el polinomio del numerador.
Un sistema modelado por una función de transferencia propia es CAUSAL.
Un sistema modelado por una función de transferencia impropia es NOCAUSAL, ANTI-CAUSAL o ANTICIPATIVO.
Lizeth Torres | 30th April 2020 77 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Ejemplo: Sistema aticipativo
La función de transferencia de un sistema representado por y(t) = du(t)dt es
Y(s)U (s) = G(s) = s.Supóngase que la entrada del sistema es u(t) = sin (ωt), entonces la
respuesta del sistema es y(t) = ω cos (ωt) que no es más que la misma señalseno amplificada y anticipada en el tiempo:
y(t) = ω sin(ωt +
π
2
).
¡¡La respuesta está adelantada en el tiempo a la entrada‼
Lizeth Torres | 30th April 2020 78 / 100

Dinámica de Sistemas Físicos - T2 | Sistemas de orden superior
Ejemplo: Sistema causal
La función de transferencia de un sistema representado por y(t) =∫ t
0 u(τ)dτes Y(s)
U (s) = G(s) = 1s .
Supóngase que la entrada del sistema es u(t) = sin (ωt), entonces la
respuesta del sistema es
y(t) =
∫ t
0sin (ωτ)dτ =
1ω
(1− cos (ωt)) =1ω− 1ω
sin (π
2− ωt)
que no es más que la misma señal seno atenuada y retrasada en el tiempo:
y(t) =1ω
+1ω
sin (ωt − π
2).
La respuesta está atrasada en el tiempo a la entrada
Lizeth Torres | 30th April 2020 79 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Considérese la siguiente función en el dominio de la frecuencia
F(s) =N (s)D(s)
donde N (s) y D(s) son polinomios en s y no poseen factores comunes.Supóngase que F(s) es una función propia, es decir, que el grado de N (s) esmenor que el de D(s).
Lizeth Torres | 30th April 2020 80 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Supóngase que todas las raíces si, i = 1, 2, ..., n del denominador D(s) son distintas.Entonces F(s) puede expandirse como una suma, es decir,
F(s) =N (s)D(s)
=c1
s − s1+
c2
s − s2+ ...+
cns − sn
Para determinar el valor de ci, se multiplican ambos miembros de la ecuaciónanterior por (s − si) para obtener la ecuación:
(s − si)F(s) = (s − si)N (s)D(s)
=c1(s − si)s − s1
+ ...+cn(s − si)s − sn
i.e, se remueve del denominador el factor s − si. Evaluando ahora el resultado ens = si, se obtiene
Lizeth Torres | 30th April 2020 81 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
ci = (s − si)F(s)|s=si = (s − si)N (s)D(s)
|s=si =N (s)D′(s)
|s=si
donde D′(si) = [dD/ds]s=si = [D(s)/(s − si)]s=si . Puesto que la transformada inversade la fracción 1/(s − si) es igual a esit , de la ecuación
F(s) = F1(s) + F2(s) + ...+ Fn(s)
se concluye qye la transformada inversa de la función racional F(s) es una suma deexponenciales:
f (t) = c1es1t + c2es2t + cnesnt
Lizeth Torres | 30th April 2020 82 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
EjercicioDetermine la transformada inversa de la función:
F(s) =s2 + 29s + 30s3 + 7s2 + 10s
Solución: El denominador de F(s) es de mayor grado que el numerador y poseefactores reales y distintos, estos son: s1 = 0, s2 = −2 y s3 = −5. Por lo tanto:
F(s) =s2 + 29s + 30s(s + 2)(s + 5)
=c1
s+
c2
s + 2+
c3
s + 5
después
Lizeth Torres | 30th April 2020 83 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
c1 = sF(s)|s=0 = 3, c2 = (s + 2)F(s)|s=−2 = 4,
c3 = (s + 5)F(s)|s=−5 = −6
Por lo tanto, a patir de las tablas,
f (t) = 3 + 4e−2t − 6e−5t , t > 0
Lizeth Torres | 30th April 2020 84 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Supóngase que el polinomio D(s) contiene factores lineales repetidos de la forma(s − si)m. Entonces, la expansión de F(s) en fracciones parciales consiste de términosde la forma: ci1
s − si+
ci2(s − si)2 + ...+
cim(s − si)m
99K (1)
donde los números cij , j = 1, 2, ...,m, son independientes de s y vienen dados por
ci,m−r =1r!
dr
dsr[(s − si)mF(s)]s=si , r = 0, 1, ...,m− 1
Lizeth Torres | 30th April 2020 85 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Así para evaluar el coeficiente ci,m−r se remueve el factor (s − si)m del denominadorF(s) y se evalúa la derivada r−ésima del resultado en s = si. La componente de f (t)debida a la raíz múltiple si es la transformada inversa de la suma en (1) y viene dadapor
ci1esit + ci2tesit + ...+cim
(m− 1)!tm−1esit
Lizeth Torres | 30th April 2020 86 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Ejercicio
F(s) =s2 + 2s + 5
(s + 3)(s + 5)2 =c1
s + 3+
c21
s + 5+
c22
(s + 5)2
tiene un polo sencillo s1 = −3 y un polo múltiple en s2 = −5 con multiplicidadm = 2.
c1 =s2 + 2s + 5
(s + 5)2 |s=−3 = 2, c22 =s2 + 2s + 5
(s + 3)|s=−5 = −10
c21 =dds
(s2 + 2s + 5
s + 3
)|s=−5 =
s2 + 6s + 1(s + 3)2 |s=−5 = −1
f (t) = 2e−3t − (1 + 10t)e−5t , t > 0
Lizeth Torres | 30th April 2020 87 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Ejemplo: Raíces complejas
F(s) =5s + 13
s (s2 + 4s + 13)
En este caso, D(s) tiene dos polos complejos, s1 = −2 + j3, s2 = −2− j3, y un poloreal, s3 = 0. Aplicando la expansión directa
F(s) =N (s)D(s)
=c1
s − s1+
c2
s − s2+ ... +
cns − sn
(1)
Lizeth Torres | 30th April 2020 88 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Da
5s + 13s (s2 + 4s + 13)
=c1
s − (−2 + j3)+
c2
s − (−2− j3)+
c3
s
donde c1 = −(1 + j)/2, c2 = −(1− j)/2 y c3 = 1. Por consiguiente,
f (t) = −1 + j2
e(−2+j3)t − 1− j2
e(−2+j3)t + 1, t > 0 (2)
Esta expresión incluye cantidades complejas. Sin embargo, es una función real.Efectivamente insertando la identidad e(−2±j3)t = e−2t(cos 3t ± j sin 3t) en (Ec. 2), seobtiene
f (t) = 1− e−2t(cos 3t − sin 3t), t > 0 (3)
la cual es una expresión real.
Lizeth Torres | 30th April 2020 89 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Ahora se demostrará que la Ec. 3 puede determinarse directamente.Considere una función racional F(s) con coeficientes reales. Como se sabe, sis1 = α+ jβ es un polo complejo de F(s), entonces su conjugado, s∗1 = α+ jβ,también es un polo. Por lo tanto la expansión de F(s) contiene términos como
c1
s − s1+
c2
s − s2, s1 = α+ jβ, s2 = α− jβ (4)
Los coeficientes de c1 y c2 se expresarán en términos de la función
G(s) =F(s)jβ
(s − s1)(s − s2) (5)
Lizeth Torres | 30th April 2020 90 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
De la Ec. 6
ci = (s − si) F(s)|s=si = (s − si)N (s)D(s)
∣∣∣∣s=si
=N (s)D′(s)
∣∣∣∣s=si
(6)
se obtiene que
c1 = (s − s1) F(s)|s=s1=
jβG(s1)
s − s2=
12G(s1)
La función G(s1) es, en general, compleja con parte real Gr y parte imaginaria Gi, esdecir,
G(s1) = Gr + jGi (7)
Lizeth Torres | 30th April 2020 91 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparcialesComo F(s2) = F ∗ (s1), de Ec. 5 se obtiene que G(s2) = G ∗ (s1) = Gr + jGi, y por lotanto,
c1 =12
(Gr + jGi), c2 =12
(Gr + jGi)
La transformada inversa de la suma de la Ec. 4 es entonces igual a
c1es1t + c2es2t =12
(Gr + jGi)e(α+jβ)t +12
(Gr + jGi)e(α−jβ)t (8)
Insertando la identidad e(α±jβ)t = eαt(cosβt ± j sinβt) en la Ec. 8, se obtiene latransformada inversa f (t) de F(s) debida a los polos complejos conjugados s1 y s2, yla cual es igual a
eαt(Gr cosβt − Gi sinβt) (9)
Lizeth Torres | 30th April 2020 92 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparcialesEl término correspondiente de f (t) lo da la Ec. 9, donde Gr y Gi son las partes real eimaginaria de G(s). El resultado se aplicará a la función
F(s) =5s + 13
s (s2 + 4s + 13)
En este caso,
(s−s1)(s−s2) = s2+4s+13, s1 = −2+j3, s2 = −2−j3, α = −2, β = 3
G(s) =F(s)jβ
(s2 + 4s + 13) =5s + 13j3s
, G(s1) =5(−2 + j3) + 13j3(−2 + j3)
Por tanto, Gr = −1,Gi = −1y la Ec. 9 da
e2t(− cos 3t + sin 3t)
Lizeth Torres | 30th April 2020 93 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparcialesEjemploObtener la transformada de Laplace inversa de la función
F(s) =s
(s2 + 9) (s + 2)=
c1
s − j3+
c2
s + j3+
c3
s + 2
El coeficiente c3 correspondiente al polo real s3 = −2 se determina directamente apartir de la Ec. 6
c3 = (s + 2) F(s)|s=−2 = − 213
Los otros dos polos s1 = j3 y s2 = −j3 de F(s) son imaginarios puros con α = 0 yβ = 3. Puesto que
(s − s1)(s − s2) = s2 + 9
la función G(s) correspondiente en la Ec. 5 está dada porLizeth Torres | 30th April 2020 94 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
G(s) =F(s)jβ
(s2 + 9) =s
j3(s + 2)
Por lo tanto,
G(s1) =j3
j3(j3 + 2)=
213− j
313
Agregando el término c3e−2t debido al polo real s3 = −2, se obtiene
f (t) =23
cos 3t +313
sin 3t − 23)e−2t
Lizeth Torres | 30th April 2020 95 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparcialesEjemplo: Fracciones impropias
F(s) =3s2 + 15s + 14s2 + 3s + 2
Dividiendo se obtiene
3s2 + 15s + 14s2 + 3s + 2
= 3 +6s + 8
s2 + 3s + 2= 3 +
2s + 1
+4
s + 2y por tanto,
f (t) = 3δ(t) + 2e−t + 4e−2t
Considérese otro ejemplo. Sea la función
F(s) =s3 + 3s2 + s + 8
s2 + 4
Lizeth Torres | 30th April 2020 96 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
Entonces, procediendo de la misma forma que en el ejemplo previo, se obtiene
s3 + 3s2 + s + 8s2 + 4
= s − 1 +2s
+3
s + 4Y por lo tanto
f (t) = 3δ′(t)δ(t) + 2 + 3e−4t
En general, para una función racional
F(s) =N (s)D(s)
Lizeth Torres | 30th April 2020 97 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice A: Transformada Inversa de Laplace por fracciones parciales
Transformación inversa por expansión en fraccionesparciales
donde el grado de N (s) es mayor o igual que el de D(s), se procede a la división paraobtener
F(s) = cm−nsm−n + ...+ c1s + c0 +Q(s)D(s)
= P(s) +Q(s)D(s)
donde P(s) es el cociente y Q(s) es el residuo; m es el grado del numerador y n el deldenominador(m > n). Ahora el grado de Q(s) es menor que el de D(s). La nuevafunción racional Q(s)/D(s) es propia y está preparada para su expansión. Secontinua entonces con la expansión en fracciones parciales de Q(s)/D(s) y luego seobtiene la transformada inversa de F(s). Obsérvese que el polinomio P(s) produciráfunciones singulares. Éstas no aparecen con frecuencia, pero son de utilidad en lasolución de algunos problemas prácticos.
Lizeth Torres | 30th April 2020 98 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice B: Análisis de sistemas utilizando MATLAB
Función de transferencia
¿Cómo generar una función de transferencia en MATLAB?sistema=tf([1 8],[1 10 61])
¿Cómo crear un mapa de polos y ceros en MATLAB?pzmap(sistema)
¿Cómo cálcular polos y ceros en MATLAB?pole(sistema), zero(sistema)
¿Cómo gracar la respuesta de un sistema al impulso y al escalónunitario en MATLAB?impulse(sistema), step(sistema)
Lizeth Torres | 30th April 2020 99 / 100

Dinámica de Sistemas Físicos - T2 | Apéndice B: Análisis de sistemas utilizando MATLAB
qatlho’
Danke谢谢Grazie
Спасибо
ขอบคณ
9C4#5$Ìشكرا Merçi
Gracias
நனறி
Obrigado
Ευχαριστώ
감사합니다ध यवाद
Terima kasih
Thank you
ありがとう
Tapadh leibhཐགས་ར་ཆ་།
Go raibh maith agaibh
Xin cảm ơn
estions? [email protected]
http://lizeth-torres.info
Lizeth Torres | 30th April 2020100 /
100