
DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO …
79
DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO MECÁNICO POR MEDIO DE MEDICIONES DE CORRIENTE EN EL ESTATOR MANUEL ERNESTO SASTRE ZULUAGA UNIVERSIDAD DE LOS ANDES FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA MECANICA BOGOTÁ 2006
Transcript of DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO …

DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO MECÁNICO POR
MEDIO DE MEDICIONES DE CORRIENTE EN EL ESTATOR
MANUEL ERNESTO SASTRE ZULUAGA
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA MECANICA
BOGOTÁ
2006
DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO MECÁNICO POR
MEDIO DE MEDICIONES DE CORRIENTE EN EL ESTATOR
MANUEL ERNESTO SASTRE ZULUAGA
Proyecto de grado para optar al título de
Ingeniero Mecánico
Asesor
CARLOS FRANCISCO RODRÍGUEZ H.
Ingeniero Mecánico, D. Ing.
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERIA
DEPARTAMENTO DE INGENIERIA MECANICA
BOGOTÁ
2006
Bogotá, junio 29 de 2006
Doctor
LUIS MARIO MATEUS Director del Departamento de Ingeniería Mecánica
UNIVERSIDAD DE LOS ANDES
Ciudad
Estimado Doctor:
Cordialmente someto a su consideración el proyecto de grado titulado
DETECCIÓN DE FALLAS EN EL FUNCIONAMIENTO MECÁNICO POR
MEDIO DE MEDICIONES DE CORRIENTE EN EL ESTATOR, cuyo principal
objetivo es analizar la viabilidad de métodos alternativos para el monitoreo de
condición de maquinaria.
Presento a usted este documento como requisito final para optar al título de
Ingeniero Mecánico.
Atentamente,
_________________________
MANUEL ERNESTO SASTRE ZULUAGA
IM-2006-I-33
vii
AGRADECIMIENTOS El autor expresa sus agradecimientos a:
CARLOS FRANCISCO RODRÍGUEZ H. Ingeniero Mecánico, Dr. Ing. y
Profesor del Departamento de Ingeniería Mecánica de la Universidad de los
Andes, por su valiosa asesoría y orientación a lo largo de esta investigación.
DAVID DELGADO C., Estudiante de Ingeniería Mecánica de la Universidad de
los Andes, por su colaboración y apoyo durante todo el proceso.
DAVID BONILLA K., Estudiante de Ingeniería Mecánica de la Universidad de
los Andes, por su colaboración y apoyo durante la fase de medición.

IM-2006-I-33
viii
CONTENIDO
LISTA DE FIGURAS ix
LISTA DE TABLAS xi
RESUMEN xii
RESUMEN xii
1. INTRODUCCIÓN 15
2. OBJETIVO GENERAL 17
2.1 OBJETIVOS ESPECÍFICOS 17
3. MARCO CONCEPTUAL 18
4. DESCRIPCIÓN DEL BANCO DE PRUEBAS 22
4.1 COMPONENTES 22
4.1.1 MOTOR 22
4.1.2 SISTEMA 23
4.2 DISPOSITIVOS DE MEDICIÓN 25
4.2.1 TORQUÍMETRO 25
4.2.2 PINZA AMPERIMÉTRICA 25
4.3 SISTEMA DE ADQUISICIÓN DE DATOS 26
4.4 SISTEMA DE AMPLIFICACIÓN 26
4.5 MONTAJE 28
5. DESCRIPCIÓN DEL EXPERIMENTO 30
6. RESULTADOS EXPERIMENTALES Y ANÁLISIS 31
7. CONCLUSIONES Y RECOMENDACIONES 45
REFERENCIAS BIBLIOGRÁFICAS 49
ANEXO 1: RESULTADOS ADICIONALES DE MEDICIONES 50
ANEXO 2: ESPECIFICACIONES TÉCNICAS DE LA PINZA AMPERIMÉTRICA
AEMC AC/DC CURRENT PROBE SL261 82
IM-2006-I-33
ix
LISTA DE FIGURAS
Figura 1. Esquema de bobinado del estator de un motor trifásico[7] 19
Figura 2. Caja reductora con placa de seguridad 23
Figura 3. Engrane de 2.36 cm de diámetro 24
Figura 4. Engrane de cm de diámetro 6.69 cm de diámetro 24
Figura 5. Conexiones del cable del torquímetro 25
Figura 6. Disposición de pines para el amplificador AD620AN 27
Figura 7. Montaje final 28
Figura 8. Gráfica de corriente contra tiempo sin reductor (1) 32
Figura 9. Gráfica de torque contra tiempo sin reductor (1) 32
Figura 10. Gráfica de corriente contra tiempo con reductor en vacío (1) 33
Figura 11. Gráfica de torque contra tiempo con reductor en vacío (1) 33
Figura 12. Gráfica de corriente contra tiempo con reductor bajo carga
moderada (1) 34
Figura 13. Gráfica de torque contra tiempo con reductor bajo carga moderada
(1) 34
Figura 14. Gráfica de corriente contra tiempo con reductor bajo carga máxima
(1) 35
Figura 15. Gráfica de torque contra tiempo con reductor bajo carga máxima (1)
35
Figura 16. Gráfica de Amplitud de Corriente contra Promedio de Torque 37
Figura 17. Gráfica de Amplitud de Corriente contra Amplitud de Torque 37
Figura 18. Espectro de frecuencia para corriente sin reductor (1) 39
Figura 19. Espectro de frecuencia para torque sin reductor (1) 39
Figura 20. Espectro de frecuencia para corriente con reductor en vacío (1) 40
Figura 21. Espectro de frecuencia para torque con reductor en vacío (1) 40
Figura 22. Espectro de frecuencia para corriente con reductor bajo carga
moderada (1) 41
IM-2006-I-33
x
Figura 23. Espectro de frecuencia para torque con reductor bajo carga
moderada (1) 41
Figura 24. Espectro de frecuencia para corriente con reductor bajo carga
máxima (1) 42
Figura 25. Espectro de frecuencia para torque con reductor bajo carga máxima
(1) 42
IM-2006-I-33
xi
LISTA DE TABLAS
Tabla 1. Características del motor de inducción Siemens 22
Tabla 2. Especificaciones del amplificador de instrumentación AD620AN 27
Tabla 3. Valores de corriente y torque 36
Tabla 4. Amplitudes de la frecuencia fundamental de corriente 43
IM-2006-I-33
xii
RESUMEN
TÍTULO: Detección de Fallas en el Funcionamiento Mecánico por Medio de
Mediciones de Corriente en el Estator
AUTOR: Manuel Ernesto Sastre Zuluaga
ASESOR: Carlos Francisco Rodríguez H.
El objetivo de la presente investigación es determinar la factibilidad de detectar
daños en un sistema mecánico por medio de mediciones de corriente en el
estator del motor que lo impulsa, como un método alternativo a los ya
presentes en la industria.
La motivación principal fue facilitar el trabajo de mantenimiento de maquinaria,
por medio de mediciones relativamente sencillas, como es la medición de
corriente en el estator, comparado con los métodos actualmente utilizados. Le
medición de corriente puede llevarse a cabo mientras la máquina está en
funcionamiento normal, eliminando la necesidad de realizar paradas forzosas
de los procesos, y permitiendo que el arreglo de las posibles fallas se efectúe
únicamente en el momento de una parada programada. Es evidente que de ser
exitoso, este procedimiento podría ahorrar una considerable cantidad de
trabajo y dinero.
Originalmente se planeó complementar este estudio con mediciones de ruido
por medio de un sonómetro, para encontrar la relación existente entre las dos
mediciones y así poder encontrar cómo podrían complementarse y bajo qué
condiciones podría usarse una o la otra. Debido a algunos inconvenientes con
los equipos del Laboratorio de Ingeniería Mecánica, únicamente fue posible
realizar mediciones de corriente.
IM-2006-I-33
xiii
Con este propósito se preparó un banco de pruebas en las instalaciones del
Laboratorio de Ingeniería Mecánica de la Universidad de los Andes, utilizando
una caja de reducción de una moto de bajo cilindraje como sistema de prueba
con fallas reales. Un motor de inducción trifásico fue acoplado a un torquímetro
y éste a su vez a la caja de reducción. En la fase experimental se tomaron
datos tanto de corriente en el estator del motor como de torque, bajo diferentes
niveles de carga. Se obtuvieron gráficas de corriente contra tiempo, así como
las respectivas gráficas de torque contra tiempo. De igual manera se obtuvieron
los espectros de frecuencia para cada señal medida y posteriormente se
analizaron los datos haciendo uso de software especializado.
Se encontró que la amplitud de la corriente aumenta a medida que se
incrementa el nivel de carga. Este mismo comportamiento se presenta en la
amplitud y el promedio de la señal de torque. La relación que existe entre la
amplitud de la corriente y la amplitud y el promedio del torque es totalmente
proporcional, describiendo una línea recta en ambos casos.
Los espectros de frecuencia de la corriente contienen las mismas componentes
en todos los casos, sin importar el nivel de carga de la prueba. La componente
de mayor importancia corresponde a una frecuencia de 60 Hz, que opaca a las
demás componentes, dificultando su análisis. Se encontró que a medida que
aumenta el nivel de carga, también incrementa la amplitud de esta componente
frecuencia.
En cuanto los espectros de frecuencia del torque, se encontró que las
componentes varían drásticamente entre pruebas bajo el mismo nivel de carga,
al igual que lo hacen las respectivas amplitudes. No se encontró ninguna
relación entre las componentes del espectro de frecuencia del torque y las
componentes del espectro de frecuencia de la corriente. Dentro de estas
componentes no se encuentra ninguna que corresponda a la frecuencia de
golpes esperados debidos a los daños en los engranes, lo que indica que es
posible que este daño no sea el de de mayor importancia en el reductor.
IM-2006-I-33
xiv
Teniendo en cuenta las frecuencias de ruidos cíclicos detectados por el oído
cuando el sistema está en funcionamiento, es posible que la ventana de
muestreo utilizada en las mediciones sea muy pequeña para detectar los daños
que los ocasionan. Esto lleva a pensar que el diseño de la fase de toma de
datos no haya sido del todo adecuado.
Dentro de las condiciones bajo las cuales se llevó a cabo esta investigación, se
encontró que no existe evidencia suficiente para afirmar que puede detectarse
algún daño específico en el sistema impulsado por el motor por medio de
mediciones de corriente en el estator. Sin embargo, se evidenció parte de la
relación que existe entre los incrementos de torque y los incrementos de
corriente en el estator, lo que indica que la base hipotética de este trabajo es
perfectamente válida, y podría ser comprobada desarrollando un nuevo
procedimiento de medición, teniendo en cuenta los resultados obtenidos en
esta investigación.
Este trabajo puede ser un punto de partida para posteriores investigaciones en
el tema de mantenimiento predictivo y monitoreo de condición de maquinaria,
sirviendo como base para estudios innovadores que permitan facilitar los
procesos en esta rama de la ingeniería mecánica.
IM-2006-I-33
15
1. INTRODUCCIÓN
El mantenimiento de maquinaria es parte fundamental del funcionamiento de la
industria, razón por la cual las empresas invierten gran porcentaje de su
presupuesto en este tema. A través de los años la experiencia ha demostrado
que resulta mucho más económico y sencillo realizar las reparaciones antes de
que el daño se haga evidente, objeto del cual se ocupa la rama de
mantenimiento preventivo, que busca evitar interrupciones forzosas o
imprevistas en los procesos. Más allá del mantenimiento preventivo existe el
mantenimiento predictivo, que tiene como objeto identificar anticipadamente las
necesidades de mantenimiento. Para esto se realizan operaciones de
monitoreo de condición de maquinaria, que consisten en detectar el estado de
funcionamiento de la misma por medio de mediciones pertinentes.
Uno de los métodos actualmente más importantes y confiables para el análisis
de funcionamiento de maquinaria es el análisis de vibración, en el que se mide
el espectro de vibración de los componentes de la máquina. Por medio de
análisis de Fourier es posible utilizar esta información para hacer inferencias
acerca del estado de funcionamiento del conjunto y de las piezas que lo
conforman, lo que permite tomar decisiones preventivas y predictivas de
reparación.
En trabajos y estudios anteriores se ha encontrado que además de la vibración,
pueden utilizarse otros criterios más económicos para establecer las posibles
fuentes de falla en el funcionamiento de maquinaria, como son la medición de
ruido y el análisis espectral de las corrientes del motor. Estos trabajos se han
basado principalmente en la detección de fallas directamente del motor, más no
del sistema al cual éste se encuentra acoplado.
IM-2006-I-33
16
La principal motivación de esta investigación radica en encontrar si estos daños
en el sistema también pueden ser detectados, al igual que en el motor,
mediante mediciones de corriente en el estator. La razón por la que se escogió
este método en particular radica en la relativa facilidad y bajo costo de tomar
esta medición en cualquier lugar. Se sabe que la corriente consumida por el
motor es una función del torque del mismo. Las fallas en el mecanismo inducen
cambios en las solicitudes de torque en el motor y por lo tanto esto debería
manifestarse en la corriente consumida. De esta manera se busca establecer
una relación entre los cambios en la corriente y los posibles daños o fallas
presentes en el sistema.
IM-2006-I-33
17
2. OBJETIVO GENERAL
Estudiar un método alternativo de análisis de funcionamiento de maquinaria, a
saber, las mediciones de corriente eléctrica en el motor, para detección
temprana de fallas.
2.1 OBJETIVOS ESPECÍFICOS
o Montaje de un banco de pruebas para la realización de experimentos.
o Realizar pruebas experimentales sobre un mecanismo en mal estado,
tomando mediciones de torque y corriente en el estator.
o Verificar si es posible detectar fallas en el sistema que se encuentra
acoplado a un motor eléctrico por medio de estas mediciones.
IM-2006-I-33
18
3. MARCO CONCEPTUAL
Un motor eléctrico es un dispositivo que transforma energía eléctrica en
energía mecánica. Los motores AC se caracterizan, como su nombre lo indica,
por utilizar corriente alterna para su funcionamiento. Existen dos clasificaciones
generales de motores AC: los motores síncronos y los motores de inducción.
Debido a su robustez, facilidad de diseño, bajo costo y poca necesidad de
mantenimiento, el motor AC de inducción es el más numeroso y común en
industria y hogar. Este motor hace uso del principio físico de inducción
electromagnética para su funcionamiento.
Las dos partes básicas del motor de inducción son el estator y el rotor, que gira
dentro del estator. La naturaleza sinusoidal de la corriente alterna aplicada al
estator hace que se genere un campo magnético también variante (a la misma
frecuencia de la corriente), que a su vez genera un voltaje en el rotor. Este
voltaje produce una corriente en el rotor, que también genera un campo
magnético dentro del mismo, el cual interactúa con el campo del estator,
oponiéndose a él, generando torque y así el movimiento mecánico deseado. El
campo magnético inducido en el rotor gira en dirección contraria al movimiento
del mismo.
IM-2006-I-33
19
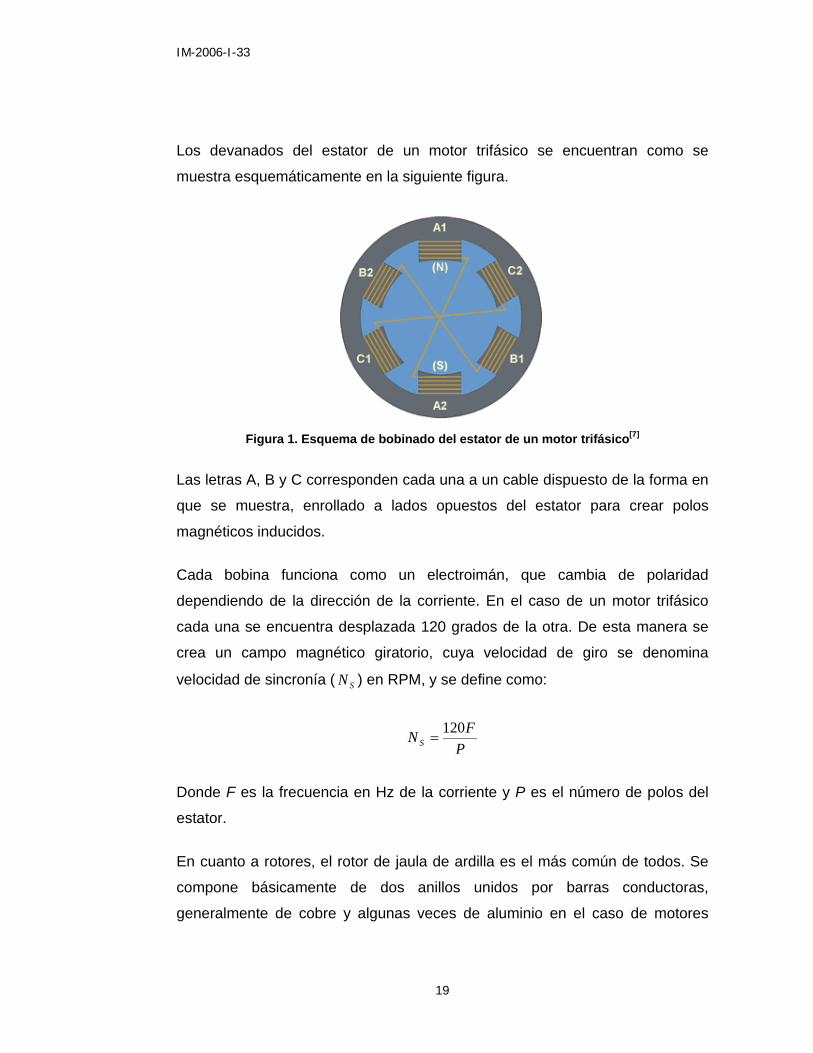
Los devanados del estator de un motor trifásico se encuentran como se
muestra esquemáticamente en la siguiente figura.
Figura 1. Esquema de bobinado del estator de un motor trifásico[7]
Las letras A, B y C corresponden cada una a un cable dispuesto de la forma en
que se muestra, enrollado a lados opuestos del estator para crear polos
magnéticos inducidos.
Cada bobina funciona como un electroimán, que cambia de polaridad
dependiendo de la dirección de la corriente. En el caso de un motor trifásico
cada una se encuentra desplazada 120 grados de la otra. De esta manera se
crea un campo magnético giratorio, cuya velocidad de giro se denomina
velocidad de sincronía ( SN ) en RPM, y se define como:
PFNS
120=
Donde F es la frecuencia en Hz de la corriente y P es el número de polos del
estator.
En cuanto a rotores, el rotor de jaula de ardilla es el más común de todos. Se
compone básicamente de dos anillos unidos por barras conductoras,
generalmente de cobre y algunas veces de aluminio en el caso de motores
IM-2006-I-33
20
pequeños, formando un circuito en corto. El campo magnético inducido por el
estator en la jaula hace que ésta se comporte como un electroimán.
La velocidad de giro del rotor es diferente de la del campo magnético del
estator. Esta diferencia de velocidades se denomina slip o deslizamiento y se
presenta en forma porcentual de la siguiente manera:
100% ×−
=S
RS
NNNntoDeslizamie
Donde RN es la velocidad del rotor en RPM.
De no existir esta diferencia de velocidades de giro, no habría movimiento
relativo entre el rotor y el estator, por lo que no se cortarían líneas de campo
magnético y de esta manera nunca se generaría el torque necesario. Por esta
razón, y por la presencia de fricción en los rodamientos del rotor, éste nunca
girará a la velocidad de sincronía. Para ilustrar esto, basta con suponer el caso
de que el rotor girara a la velocidad de sincronía, como fue dicho
anteriormente. El torque sería igual a cero. La velocidad de giro del rotor
disminuiría a causa de la fricción, y las líneas de flujo magnético serían
cortadas nuevamente, induciéndose de nuevo corriente en el rotor, generando
así una vez más las fuerzas de repulsión. En el momento en que se aplica una
carga externa al motor, su velocidad disminuye como resultado de este torque
contrario. Al mismo tiempo la velocidad de deslizamiento aumenta y se genera
mayor voltaje y mayor corriente en el estator. Este proceso continúa hasta el
punto en que el torque generado por inducción iguale al torque necesario para
mover la carga. Como lo dice Lloyd[1], la corriente del estator debe ser lo
suficientemente alta como para neutralizar la fuerza magnética del rotor (que se
le opone) y al mismo tiempo suministrar el flujo necesario para darle al estator
la fuerza electromotriz que lo impulsa. En el caso de cero carga, la corriente de
entrada corresponde únicamente a aquella necesitada para magnetizar el
IM-2006-I-33
21
acero del estator y el rotor y transmitir el flujo a través del espacio de aire entre
estos dos.
El eje del motor se encuentra montado dentro del rotor, que a su vez tiene un
rodamiento en cada extremo para permitir el movimiento rotativo.
Otro tipo de construcción de rotor consiste en un núcleo de láminas metálicas
bobinadas con cable aislado. En este caso las bobinas están conectadas a
resistencias externas por medio de anillos y escobillas. Al igual que en el caso
de la jaula de ardilla, el campo magnético variable del estator induce un voltaje
en estas bobinas y por lo tanto un flujo de carga, que puede ser ajustado por
medio de las resistencias variables. De esta manera es posible controlar la
velocidad de giro del rotor, aumentando o disminuyendo el valor de las
resistencias.
Entre el estator y el rotor existe un espacio muy pequeño de aire llamado
entrehierro, sin contacto físico ni eléctrico entre los dos, por lo que toda la
transferencia de energía se lleva a cabo netamente por inducción.
La corriente eléctrica requerida por el motor varía proporcionalmente con la
solicitud de torque. De esta manera, en las mediciones se espera obtener una
onda superpuesta a la onda de la alimentación.

IM-2006-I-33
22
4. DESCRIPCIÓN DEL BANCO DE PRUEBAS
4.1 COMPONENTES
4.1.1 MOTOR
El sistema es movido por un motor de jaula de ardilla facilitado por el
Laboratorio de Ingeniería Mecánica, cuyas características principales se
muestran en la siguiente tabla.
Marca Siemens
Potencia Nominal 1.8 HP
Velocidad Nominal 1700 RPM
Corriente Nominal 2.8 A
Voltaje 220 Y
Frecuencia 60 Hz
Factor de Potencia 0.81
Tabla 1. Características del motor de inducción Siemens

IM-2006-I-33
23
4.1.2 SISTEMA
El sistema seleccionado fue la caja de reducción de una moto de bajo
cilindraje, conseguida en el mercado como chatarra. Este sistema presenta
numerosas fallas en diversas piezas, siendo la más importante la falta de varios
dientes en los engranes. La carcasa de aluminio fue perforada y modificada
para ser montada sobre el banco de pruebas. Adicionalmente se diseñó una
placa utilizada para aislar las piezas móviles y prevenir accidentes, teniendo en
cuenta que la velocidad nominal del motor es de 1700 RPM. La horquilla fue
manipulada de tal manera que la relación de reducción se mantuviera fija. Ésta
corresponde a un engrane impulsor de 2.36 cm de diámetro y uno de 6.69 cm
de diámetro.
Figura 2. Caja reductora con placa de seguridad
IM-2006-I-33
24
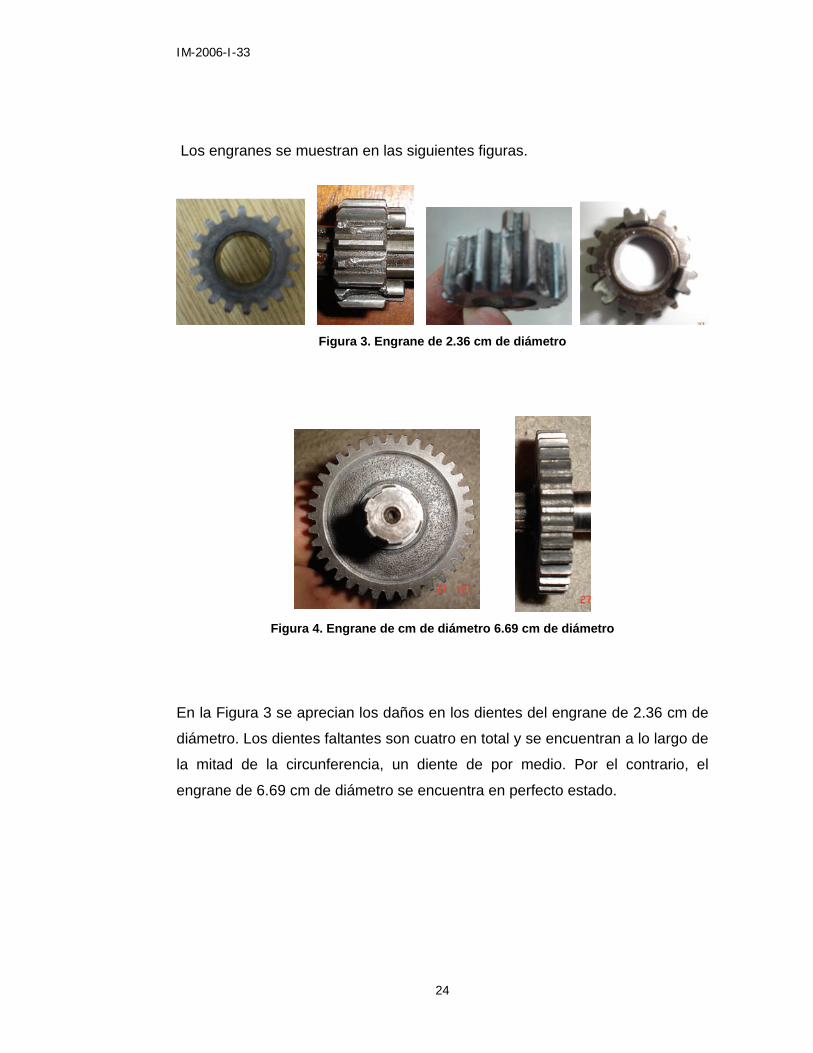
Los engranes se muestran en las siguientes figuras.
Figura 3. Engrane de 2.36 cm de diámetro
Figura 4. Engrane de cm de diámetro 6.69 cm de diámetro
En la Figura 3 se aprecian los daños en los dientes del engrane de 2.36 cm de
diámetro. Los dientes faltantes son cuatro en total y se encuentran a lo largo de
la mitad de la circunferencia, un diente de por medio. Por el contrario, el
engrane de 6.69 cm de diámetro se encuentra en perfecto estado.
IM-2006-I-33
25
4.2 DISPOSITIVOS DE MEDICIÓN
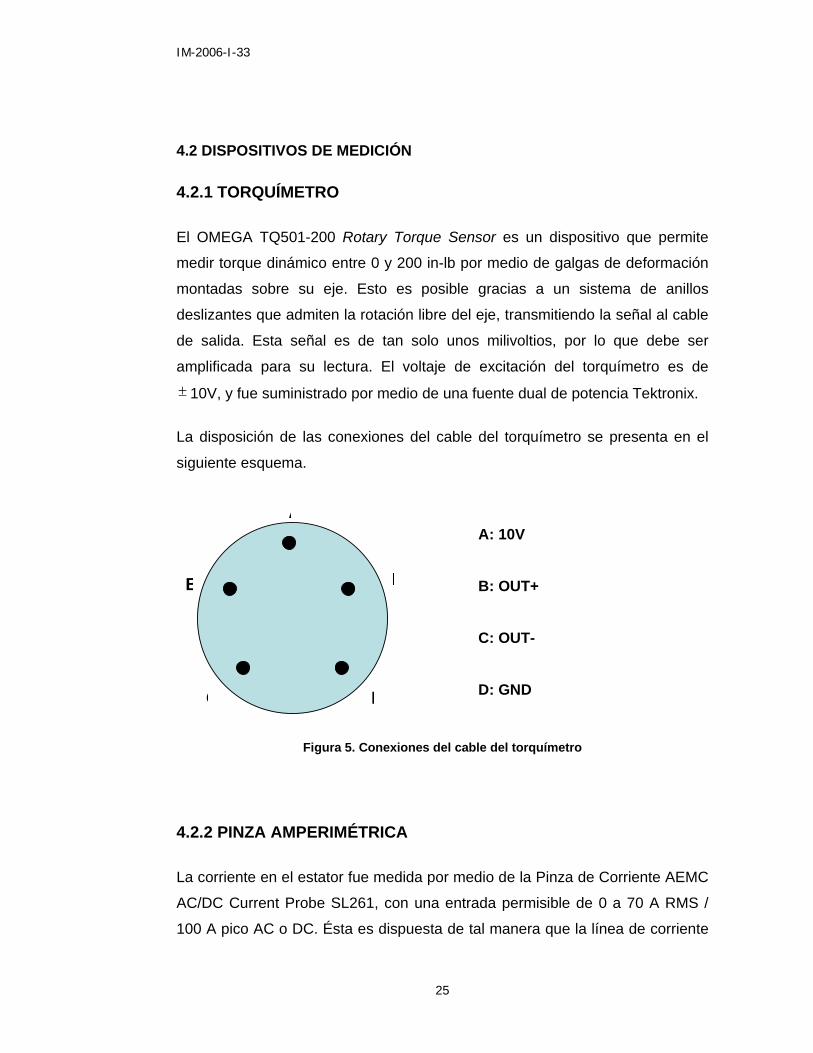
4.2.1 TORQUÍMETRO
El OMEGA TQ501-200 Rotary Torque Sensor es un dispositivo que permite
medir torque dinámico entre 0 y 200 in-lb por medio de galgas de deformación
montadas sobre su eje. Esto es posible gracias a un sistema de anillos
deslizantes que admiten la rotación libre del eje, transmitiendo la señal al cable
de salida. Esta señal es de tan solo unos milivoltios, por lo que debe ser
amplificada para su lectura. El voltaje de excitación del torquímetro es de ± 10V, y fue suministrado por medio de una fuente dual de potencia Tektronix.
La disposición de las conexiones del cable del torquímetro se presenta en el
siguiente esquema.
Figura 5. Conexiones del cable del torquímetro
4.2.2 PINZA AMPERIMÉTRICA
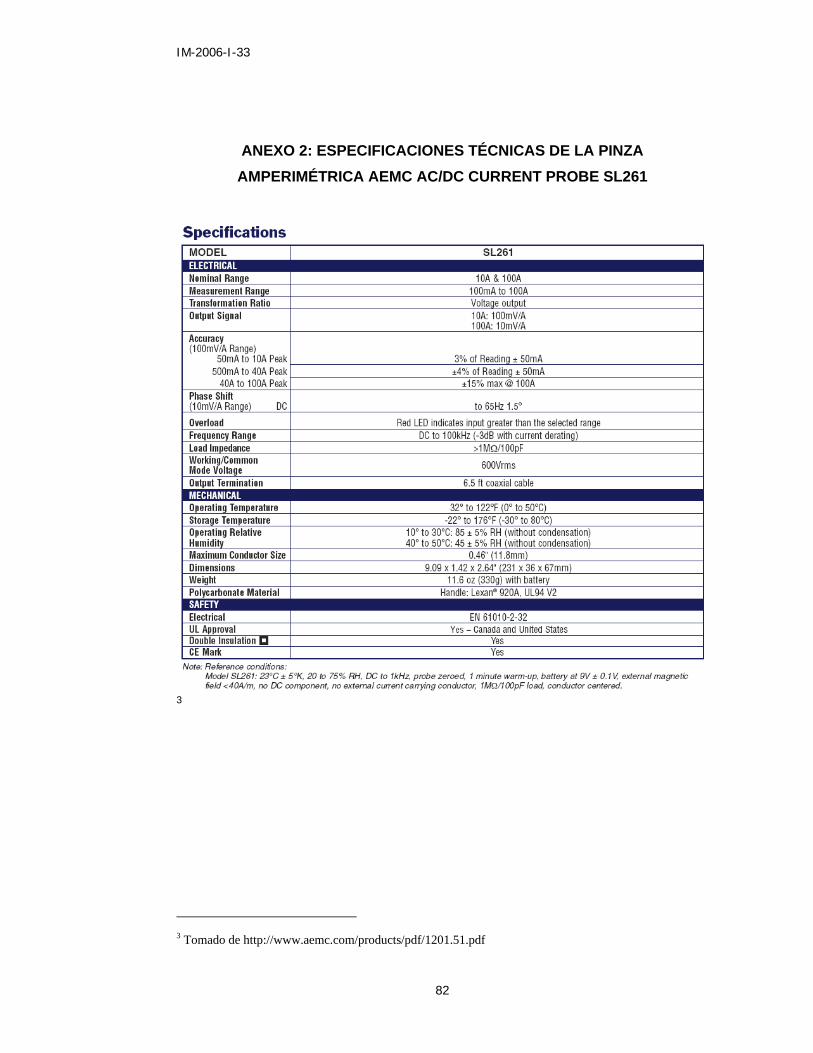
La corriente en el estator fue medida por medio de la Pinza de Corriente AEMC
AC/DC Current Probe SL261, con una entrada permisible de 0 a 70 A RMS /
100 A pico AC o DC. Ésta es dispuesta de tal manera que la línea de corriente
A
B
C
E
D
A: 10V B: OUT+ C: OUT- D: GND
IM-2006-I-33
26
trifásica que se desee medir atraviese su núcleo de hierro. Esta corriente
induce un campo magnético en la pinza, que a su vez induce un voltaje
proporcional a la corriente sensada, el cual es enviado al sistema de medición
por medio de un cable coaxial. En este caso se utilizó una salida de 100mV/A.
Las especificaciones técnicas se encuentran en el Anexo 2.
4.3 SISTEMA DE ADQUISICIÓN DE DATOS
El instrumento utilizado para la adquisición de datos fue el osciloscopio Fluke
99. Este osciloscopio tiene la capacidad de tomar datos por dos canales
diferentes e independientes y almacenarlos en su memoria. Además cuenta
con el software FlukeView Scopemeter, que permite transferir los datos
almacenados a un computador por medio de un cable de fibra óptica para su
posterior manipulación.
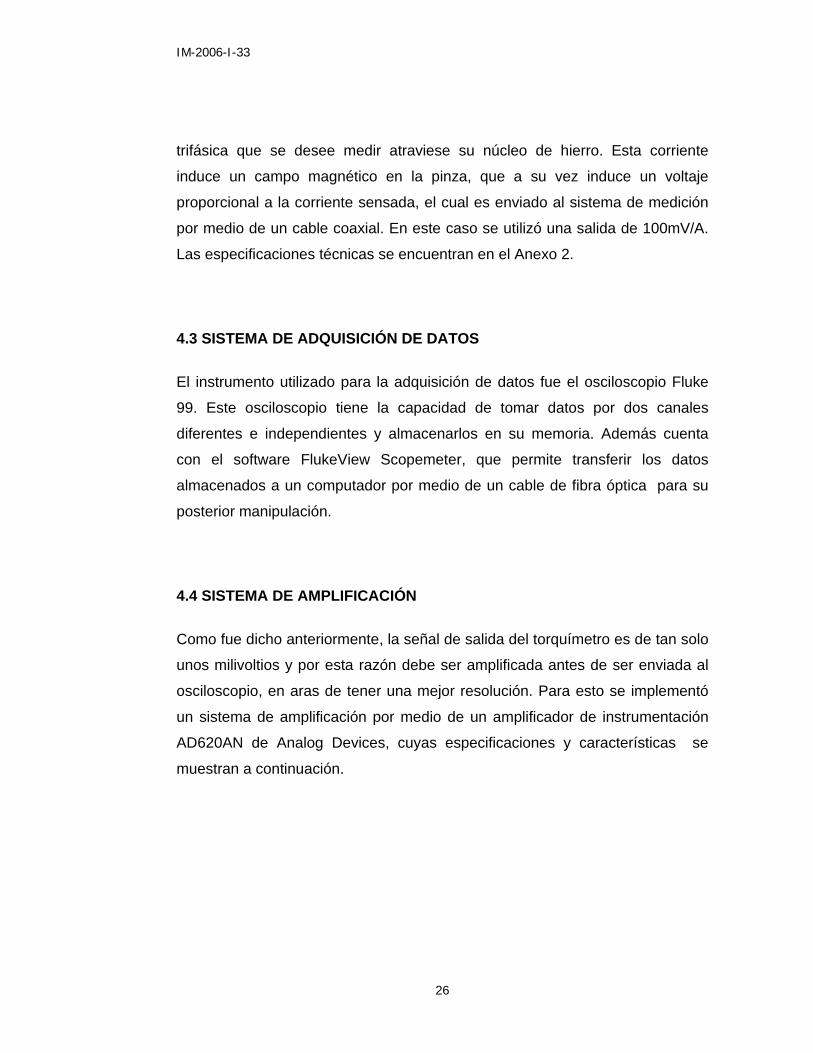
4.4 SISTEMA DE AMPLIFICACIÓN
Como fue dicho anteriormente, la señal de salida del torquímetro es de tan solo
unos milivoltios y por esta razón debe ser amplificada antes de ser enviada al
osciloscopio, en aras de tener una mejor resolución. Para esto se implementó
un sistema de amplificación por medio de un amplificador de instrumentación
AD620AN de Analog Devices, cuyas especificaciones y características se
muestran a continuación.
IM-2006-I-33
27
Figura 6. Disposición de pines para el amplificador AD620AN1
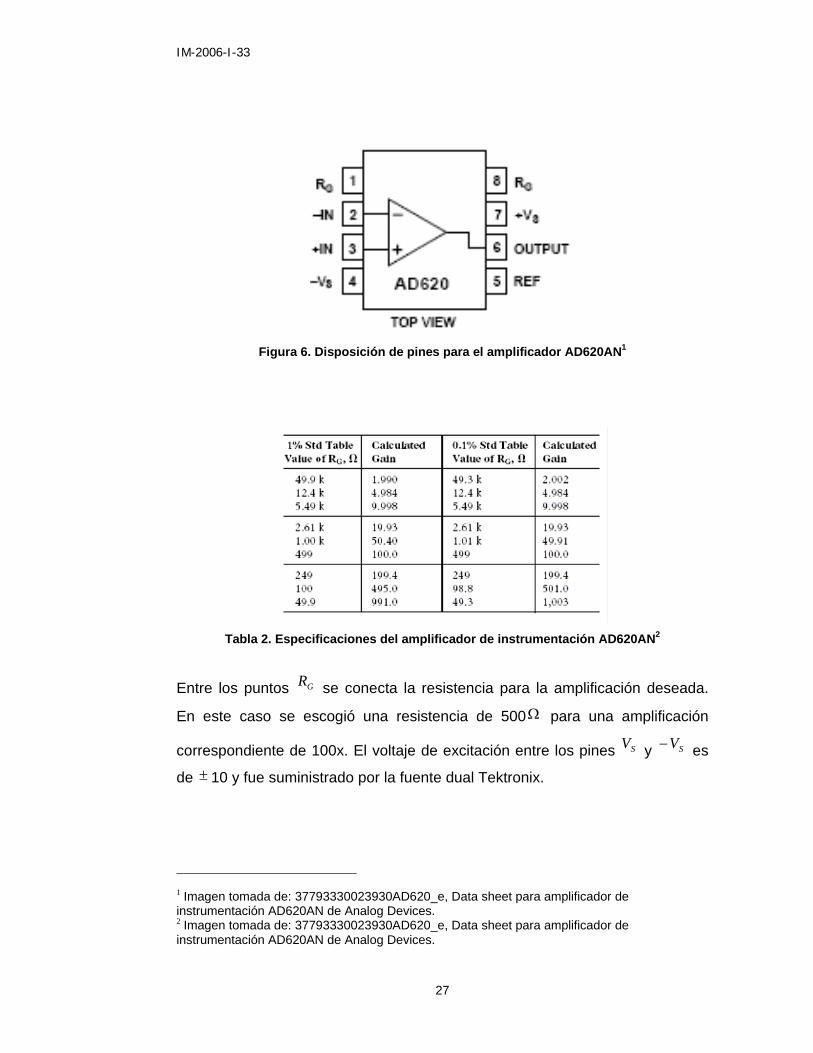
Tabla 2. Especificaciones del amplificador de instrumentación AD620AN2
Entre los puntos GR se conecta la resistencia para la amplificación deseada.
En este caso se escogió una resistencia de 500Ω para una amplificación
correspondiente de 100x. El voltaje de excitación entre los pines SV y SV− es
de ± 10 y fue suministrado por la fuente dual Tektronix.
1 Imagen tomada de: 37793330023930AD620_e, Data sheet para amplificador de instrumentación AD620AN de Analog Devices. 2 Imagen tomada de: 37793330023930AD620_e, Data sheet para amplificador de instrumentación AD620AN de Analog Devices.

IM-2006-I-33
28
4.5 MONTAJE
Los acoples entre el motor, el torquímetro y la caja de reducción se hicieron por
medio de arañas. Estos acoples cuentan con una sello de caucho que permite
una unión justa entre las dos piezas que los componen, absorbiendo además
cualquier desalineación leve que se presente entre los ejes. Cada pieza tiene
un agujero pasante que tuvo que ser ajustado al tamaño del eje al cual fue
montado. Las piezas se fijan a los ejes por medio de tornillos prisioneros.
Posteriormente se diseñó una base para montar la caja de reducción, y el
torquímetro se instaló en el lugar donde antes estuviera la caja, utilizando
platinas diseñadas para levantarlo y lograr la alineación entre los ejes.
De esta manera, el eje del motor fue acoplado con el eje del torquímetro, el
cual a su vez fue acoplado al eje de entrada de la caja de reducción.
Figura 7. Montaje final
Torquímetro Motor Reductor
IM-2006-I-33
29
El cable del torquímetro fue conectado al protoboard con el sistema de
amplificación, y ambos fueron excitados por medio de la fuente dual Tektronix
con ± 10V. La pinza de corriente fue conectada a la línea blanca de corriente
trifásica y dispuesta en medición de 100mv/A. El cable de señal de salida de la
pinza amperimétrica fue conectado directamente al Canal A del osciloscopio,
por tener conector coaxial, mientras que los cables de señal amplificada del
torquímetro fueron conectados al Canal B por medio de una sonda.
IM-2006-I-33
30
5. DESCRIPCIÓN DEL EXPERIMENTO
El modo de toma de datos en el osciloscopio Fluke 99 fue dispuesto en
Autoset, que permite identificar automáticamente las características de
medición más apropiadas para la señal de entrada. Ambos canales fueron
habilitados para verse en pantalla.
La primera fase consistió en remover la caja reductora y tomar mediciones en
vació, únicamente con el torquímetro conectado al motor. Esto permitió tener
una base de comparación para las mediciones de la segunda fase.
La segunda fase consistió en acoplar de nuevo la caja y tomar varias
mediciones a tres niveles de carga distintos:
o Sin carga
o Carga moderada
o Carga máxima
La carga fue aplicada al eje de salida de la caja reductora.
También se utilizó un multímetro Tektronix conectado a la salida del sistema de
amplificación, es decir, tomando mediciones de la misma señal amplificada
proveniente del torquímetro que entra al Canal B del osciloscopio, para verificar
que el proceso de amplificación fuera llevado a cabo correctamente.
IM-2006-I-33
31
6. RESULTADOS EXPERIMENTALES Y ANÁLISIS
Los datos almacenados en la memoria del Osciloscopio fueron transferidos a
un computador por medio de un cable de fibra óptica y procesados con ayuda
del programa FlukeView. Este programa permite obtener un espectro de
frecuencias directo para cada medición por medio de la Transformada Rápida
de Fourier, (FFT). Los resultados obtenidos fueron los siguientes.
Se tomaron cinco mediciones para cada nivel de carga. A continuación se
presenta una gráfica típica de corriente contra tiempo con su respectiva gráfica
de torque contra tiempo para cada condición. Las demás mediciones se
encuentran en el Anexo 1.
IM-2006-I-33
32
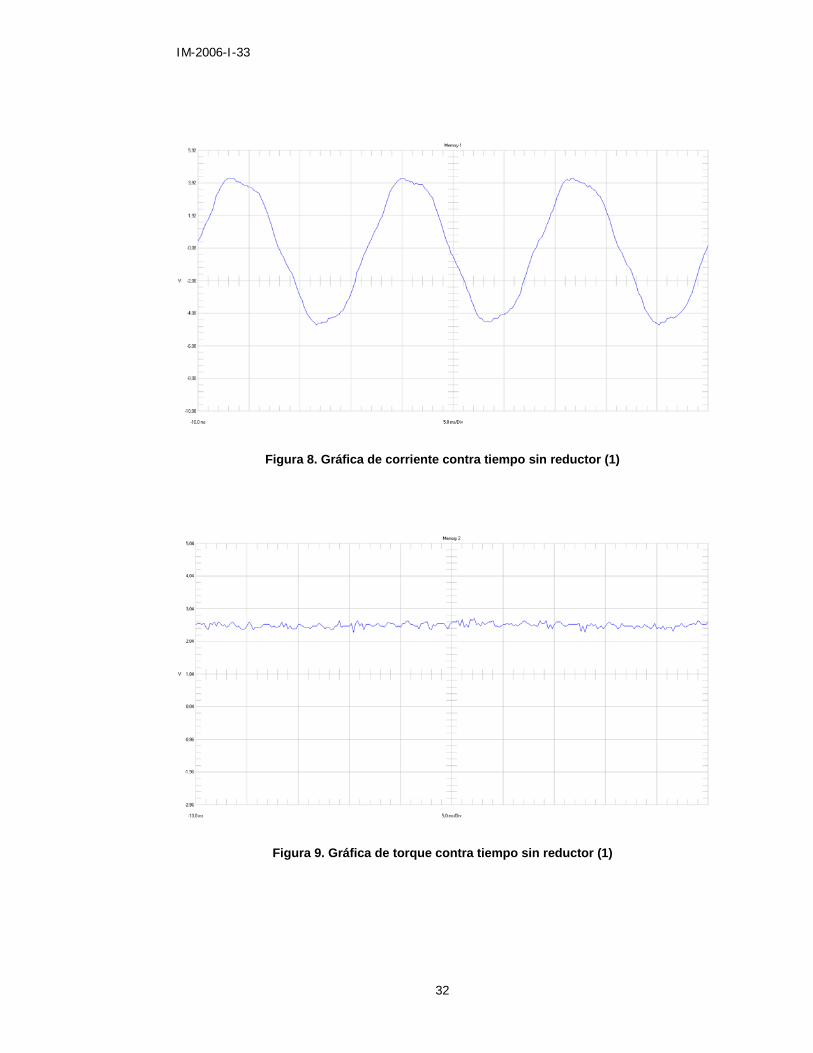
Figura 8. Gráfica de corriente contra tiempo sin reductor (1)
Figura 9. Gráfica de torque contra tiempo sin reductor (1)

IM-2006-I-33
33
Figura 10. Gráfica de corriente contra tiempo con reductor en vacío (1)
Figura 11. Gráfica de torque contra tiempo con reductor en vacío (1)
IM-2006-I-33
34
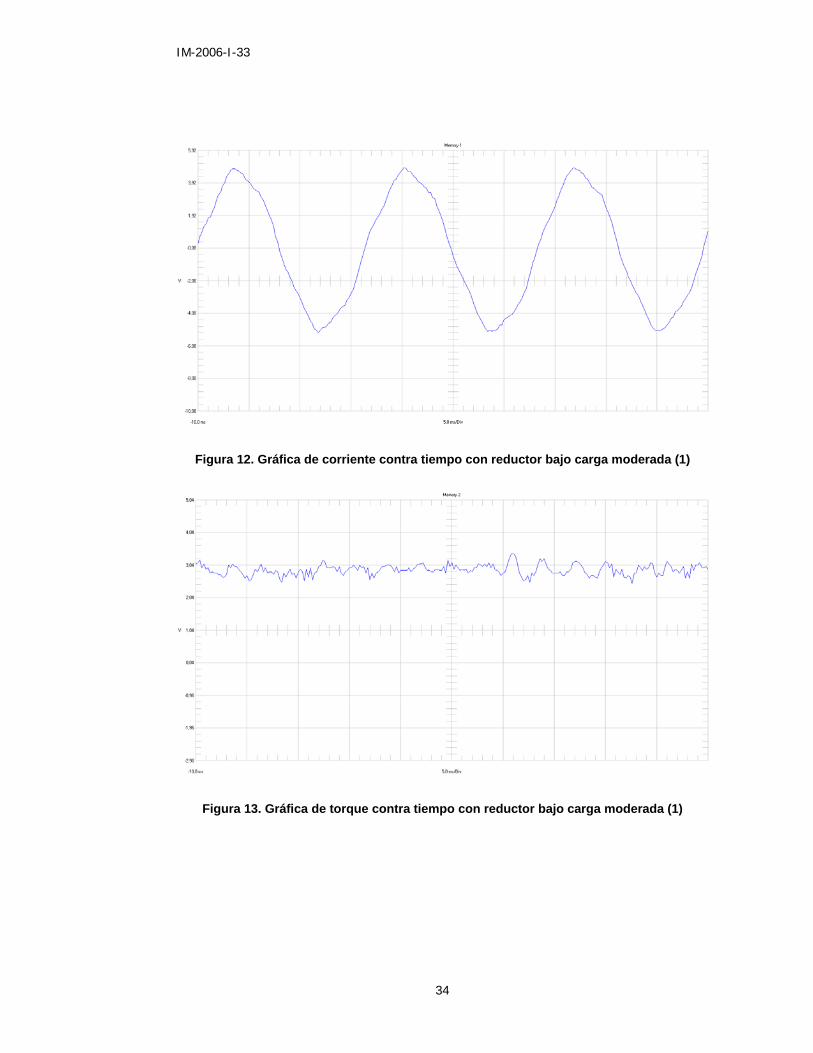
Figura 12. Gráfica de corriente contra tiempo con reductor bajo carga moderada (1)
Figura 13. Gráfica de torque contra tiempo con reductor bajo carga moderada (1)

IM-2006-I-33
35
Figura 14. Gráfica de corriente contra tiempo con reductor bajo carga máxima (1)
Figura 15. Gráfica de torque contra tiempo con reductor bajo carga máxima (1)
IM-2006-I-33
36
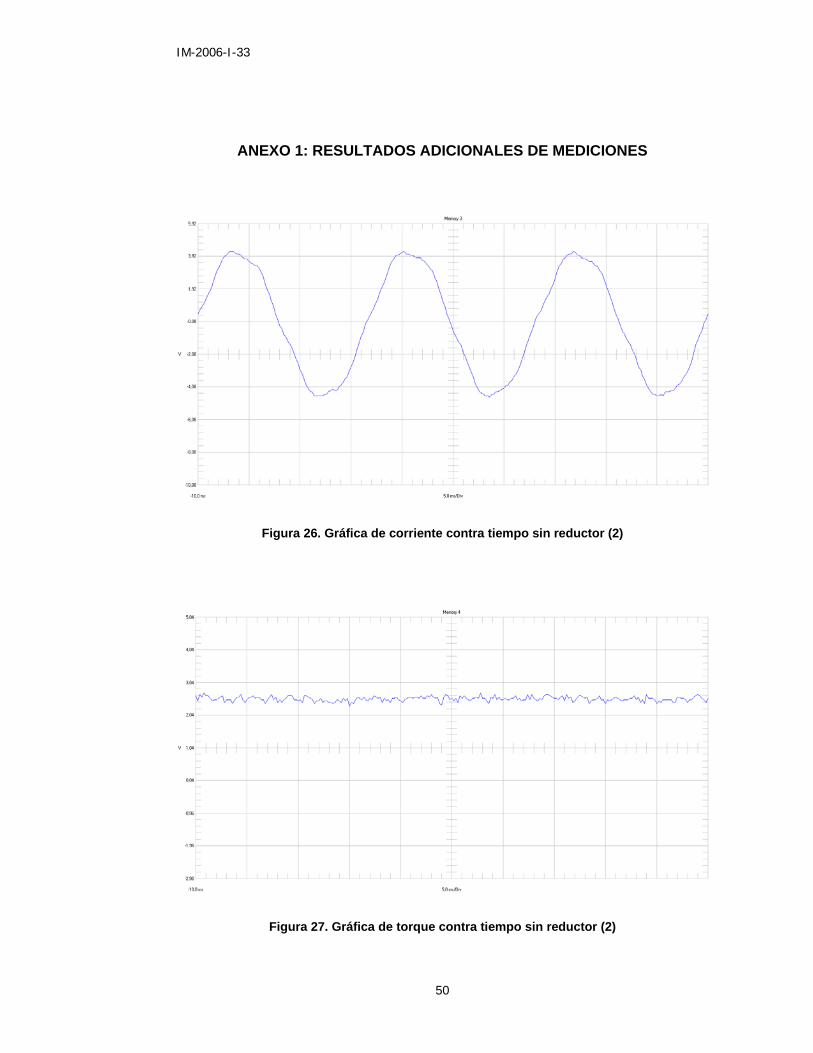
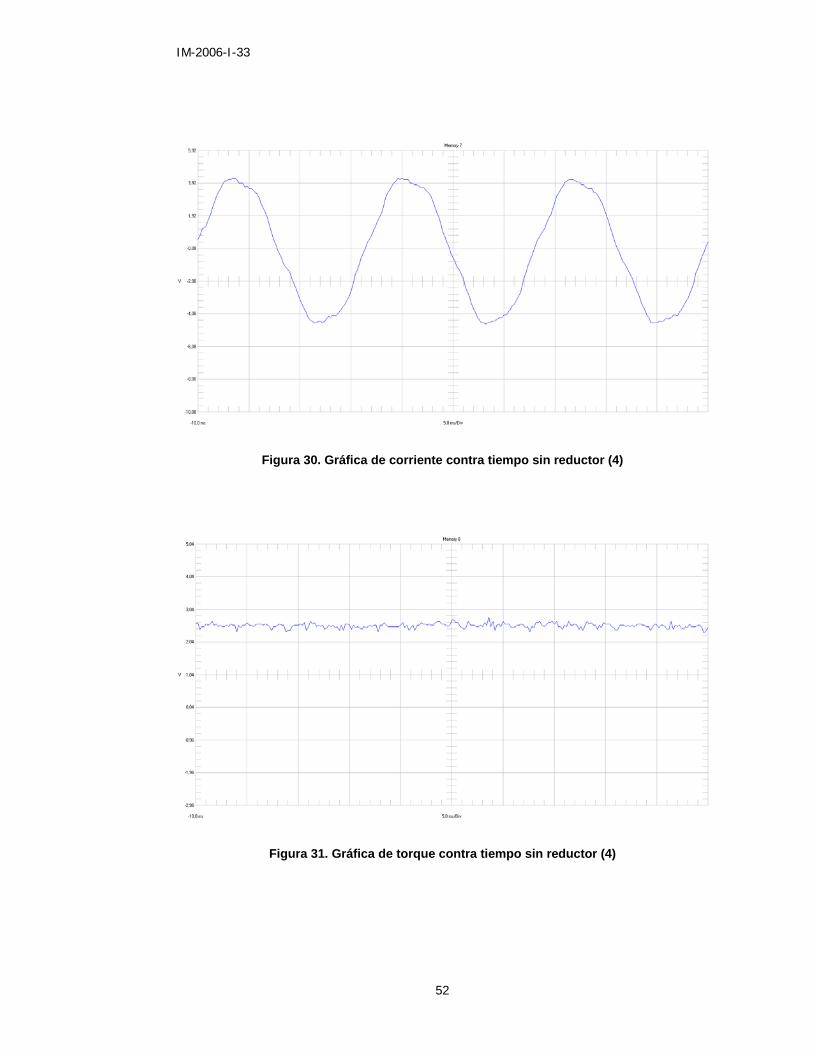
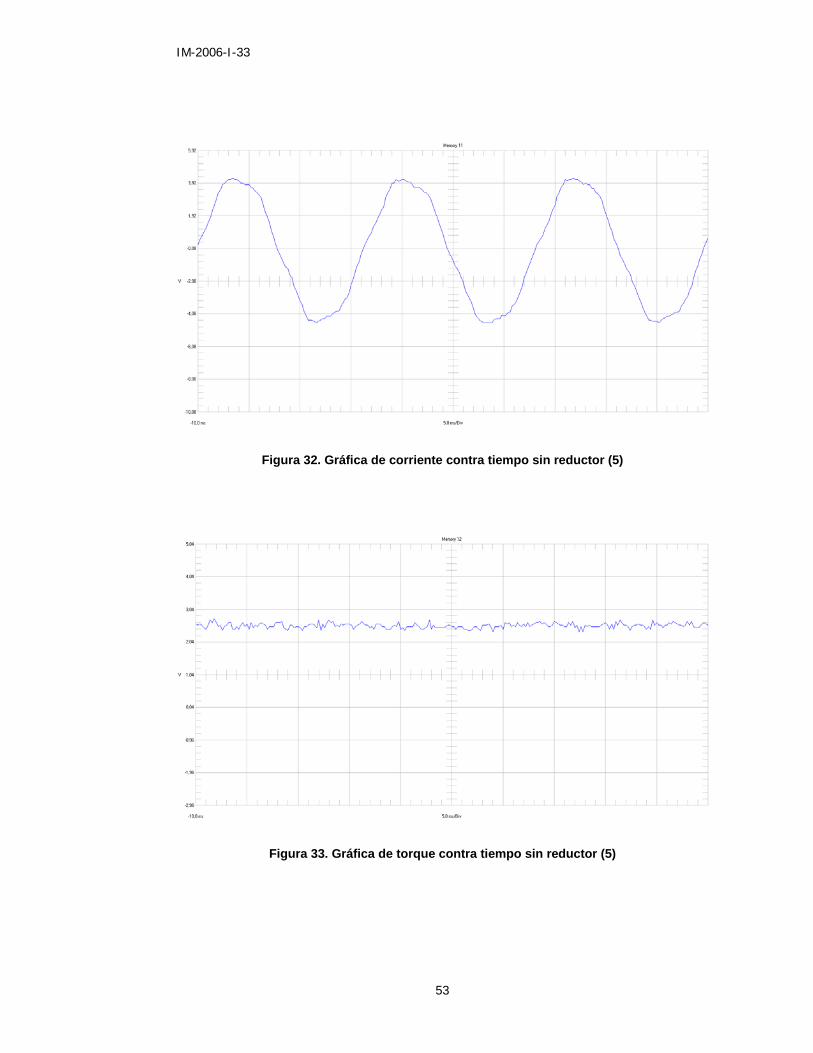
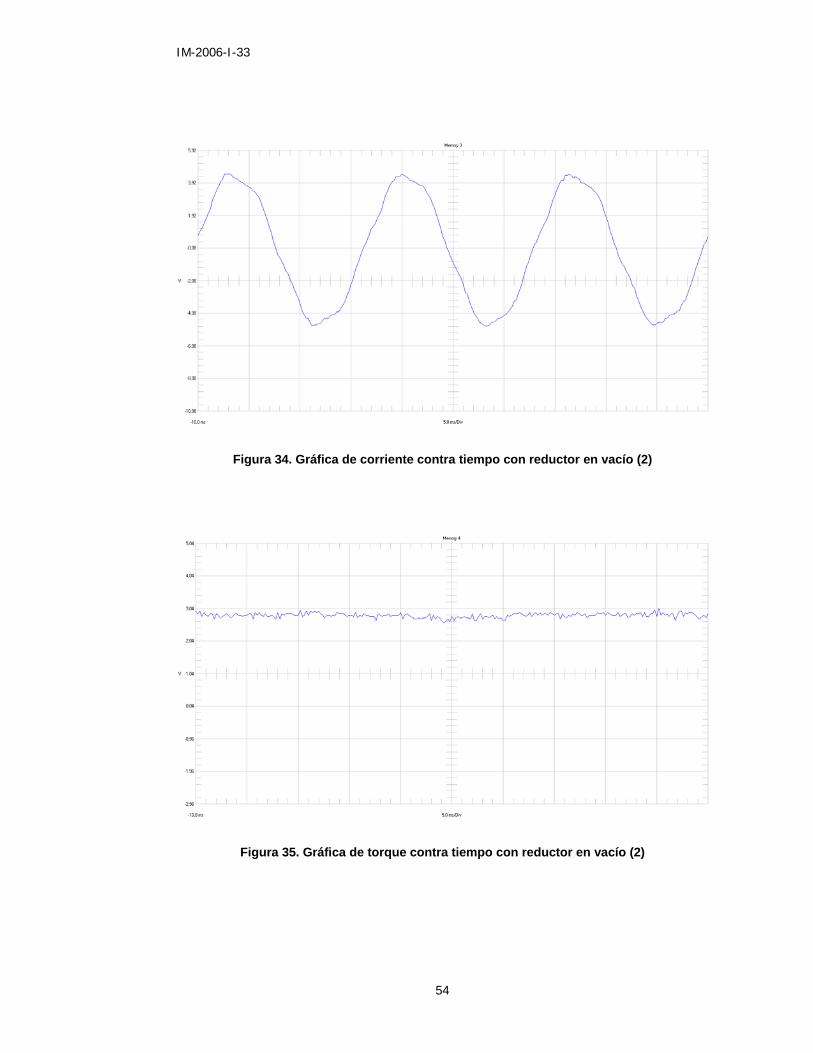
En la señal de corriente se aprecia la naturaleza sinusoidal de la onda. A
medida que aumenta el nivel de carga, las crestas y los valles de la onda se
hacen más pronunciados, lo que da cuenta del aumento en la amplitud de la
onda.
En la señal de torque se aprecia un gran número de picos al igual que un
comportamiento aparentemente sinusoidal, al menos en lo que respecta a la
onda base. El número de picos da cuenta de la gran cantidad de cambios en el
torque debidos a los daños presentes en el reductor.
Los picos presentes en la señal de corriente son demasiado pequeños
comparados con la onda base de 60 Hz. Esto hace que no se puedan
identificar los picos de corriente coincidentes con los picos de torque.
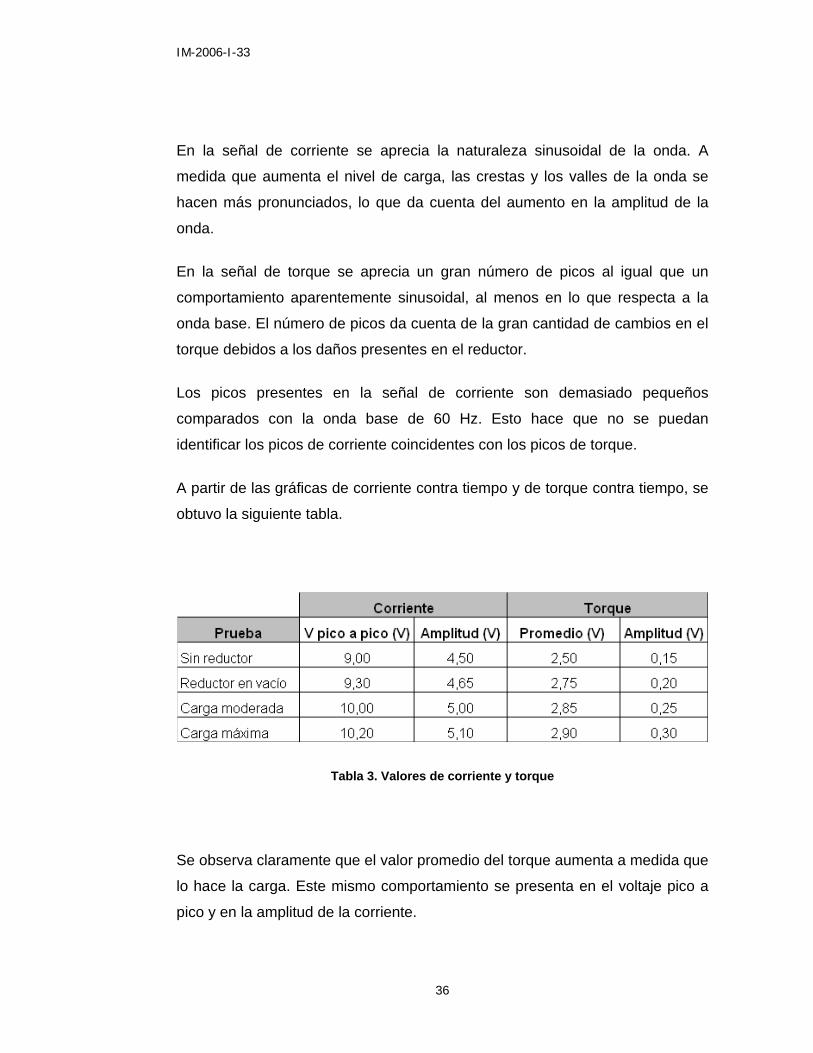
A partir de las gráficas de corriente contra tiempo y de torque contra tiempo, se
obtuvo la siguiente tabla.
Tabla 3. Valores de corriente y torque
Se observa claramente que el valor promedio del torque aumenta a medida que
lo hace la carga. Este mismo comportamiento se presenta en el voltaje pico a
pico y en la amplitud de la corriente.
IM-2006-I-33
37
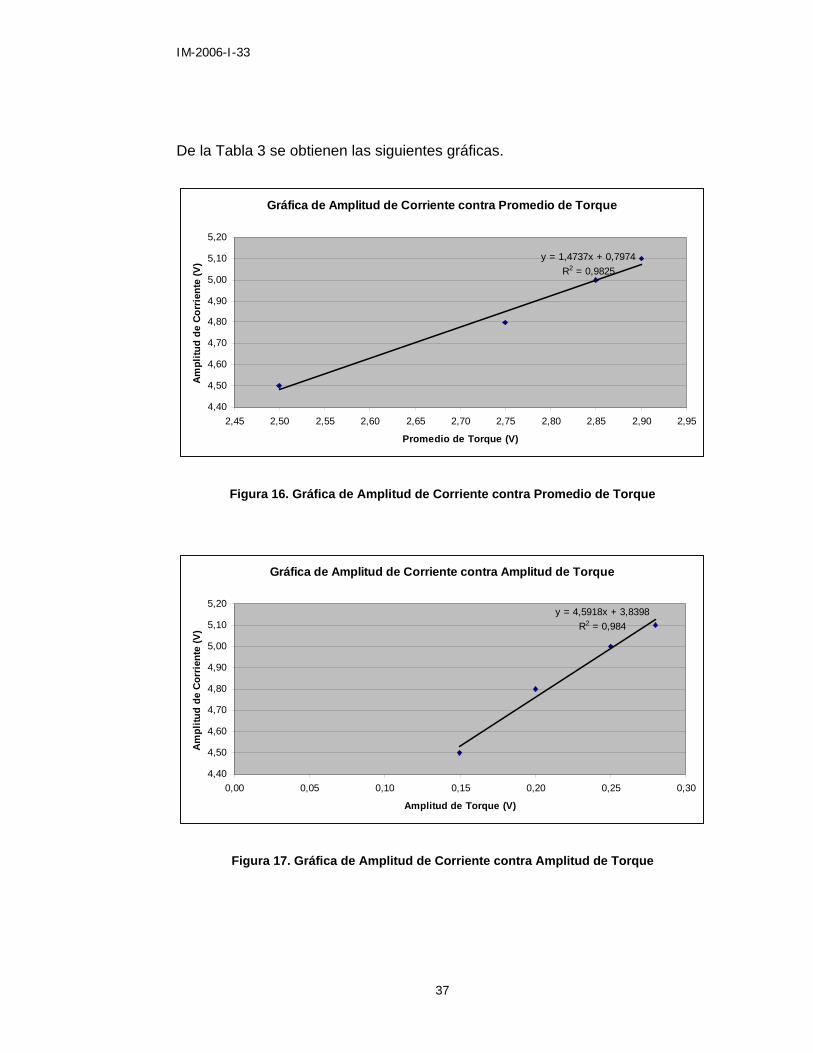
De la Tabla 3 se obtienen las siguientes gráficas.
Gráfica de Amplitud de Corriente contra Promedio de Torque
y = 1,4737x + 0,7974R2 = 0,9825
4,40
4,50
4,60
4,70
4,80
4,90
5,00
5,10
5,20
2,45 2,50 2,55 2,60 2,65 2,70 2,75 2,80 2,85 2,90 2,95
Promedio de Torque (V)
Ampl
itud
de C
orri
ente
(V)
Figura 16. Gráfica de Amplitud de Corriente contra Promedio de Torque
Gráfica de Amplitud de Corriente contra Amplitud de Torque
y = 4,5918x + 3,8398R2 = 0,984
4,40
4,50
4,60
4,70
4,80
4,90
5,00
5,10
5,20
0,00 0,05 0,10 0,15 0,20 0,25 0,30
Amplitud de Torque (V)
Am
plitu
d de
Cor
rient
e (V
)
Figura 17. Gráfica de Amplitud de Corriente contra Amplitud de Torque

IM-2006-I-33
38
Ambas gráficas presentan una relación de proporcionalidad entre los
parámetros, describiendo lo que se aproxima bastante a una línea recta. La
linealidad de ambas curvas se evidencia con el respectivo valor de R2, que se
aproxima a 1 en ambos casos.
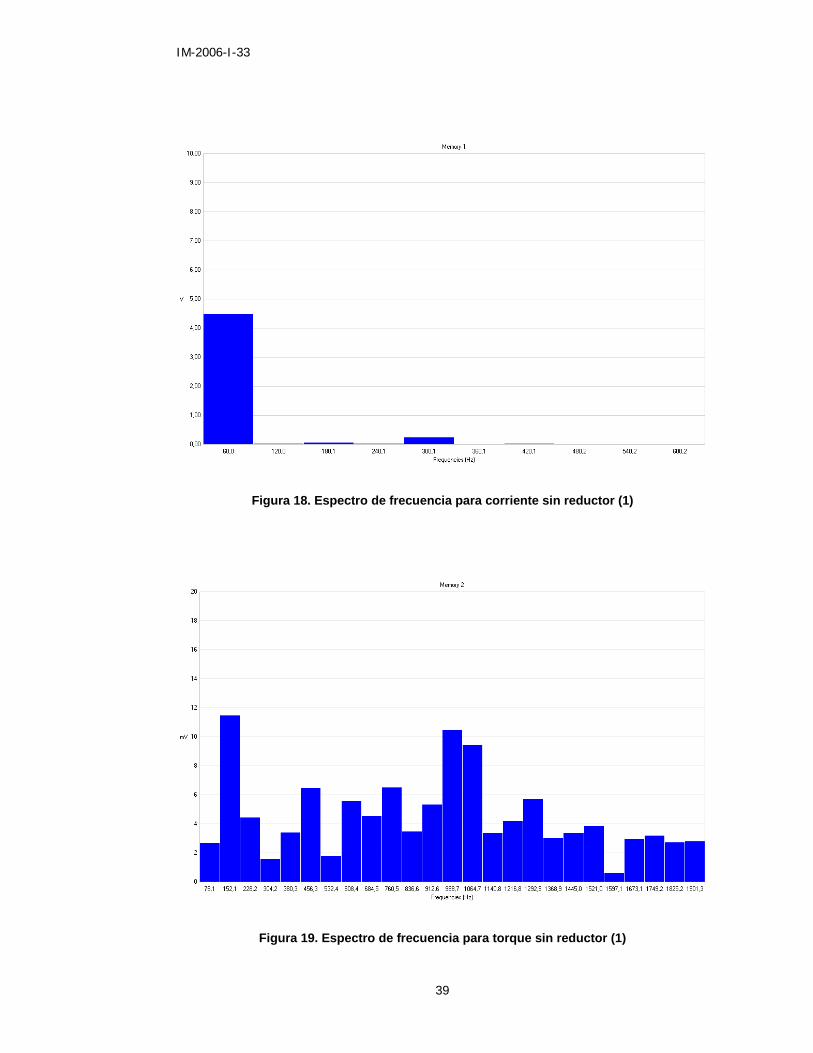
A continuación se encuentra un espectro de frecuencia típico de la señal de
corriente, con su respectivo espectro de frecuencia del torque, para cada
condición de carga. Los demás espectros se presentan en el Anexo 1.
IM-2006-I-33
39
Figura 18. Espectro de frecuencia para corriente sin reductor (1)
Figura 19. Espectro de frecuencia para torque sin reductor (1)

IM-2006-I-33
40
Figura 20. Espectro de frecuencia para corriente con reductor en vacío (1)
Figura 21. Espectro de frecuencia para torque con reductor en vacío (1)
IM-2006-I-33
41
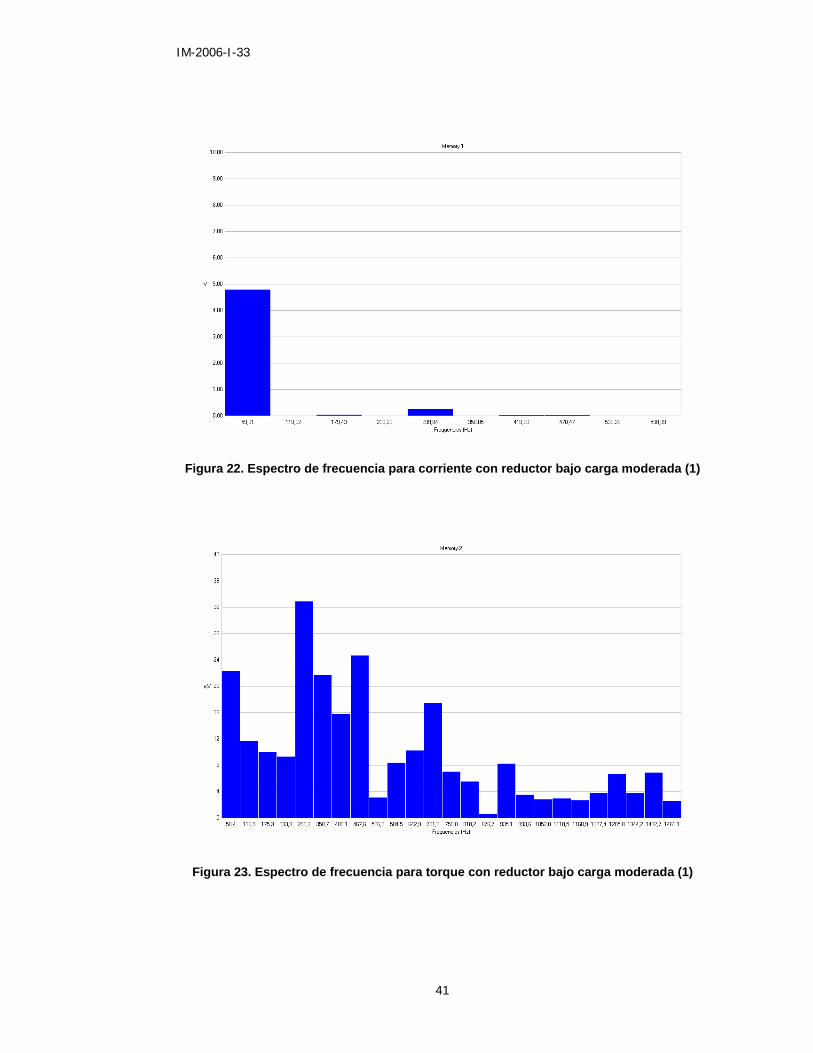
Figura 22. Espectro de frecuencia para corriente con reductor bajo carga moderada (1)
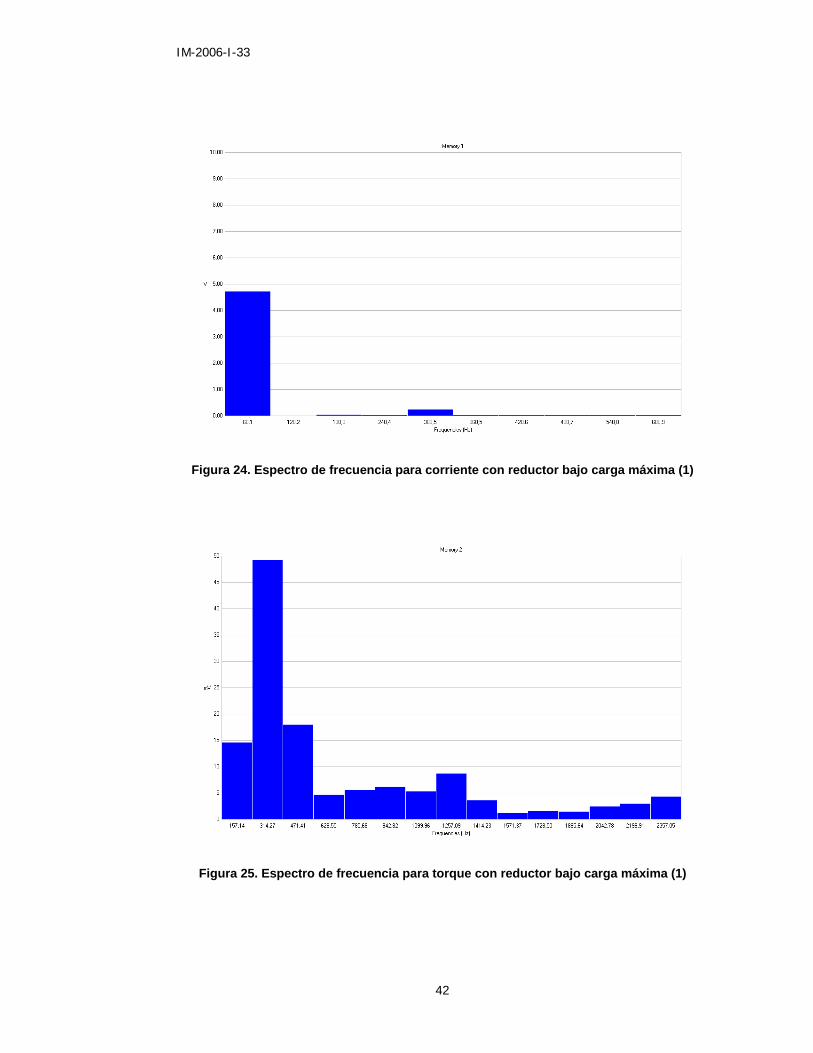
Figura 23. Espectro de frecuencia para torque con reductor bajo carga moderada (1)
IM-2006-I-33
42
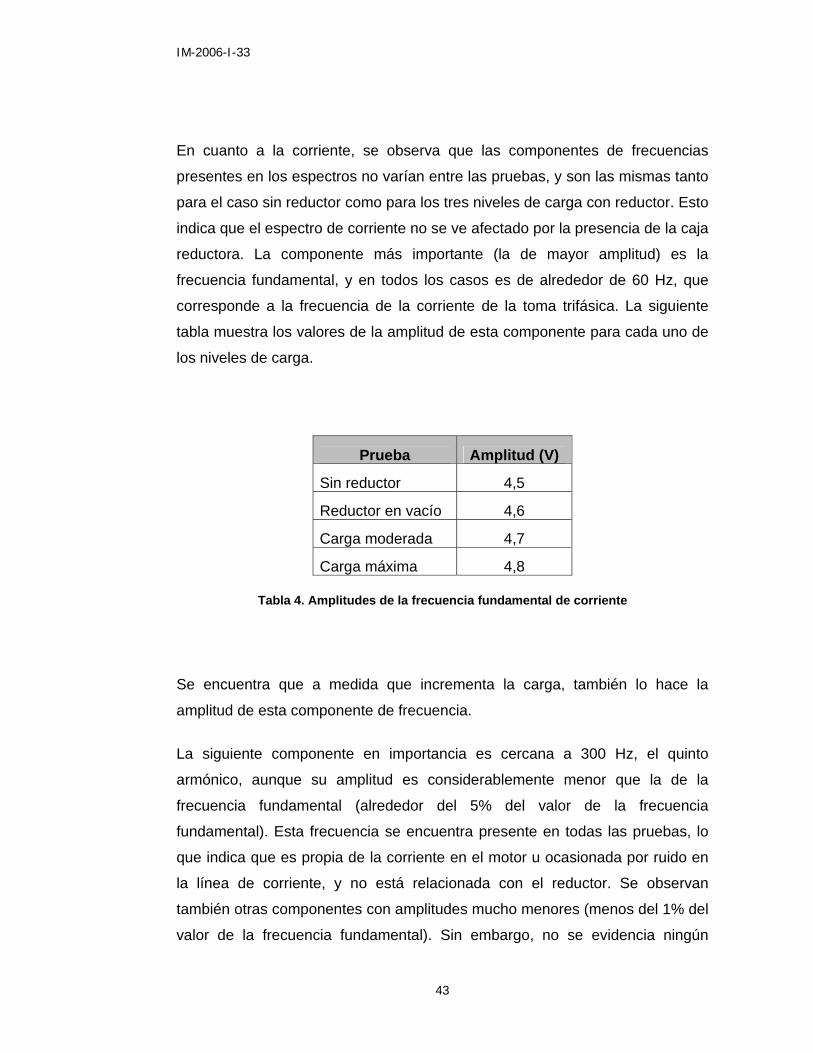
Figura 24. Espectro de frecuencia para corriente con reductor bajo carga máxima (1)
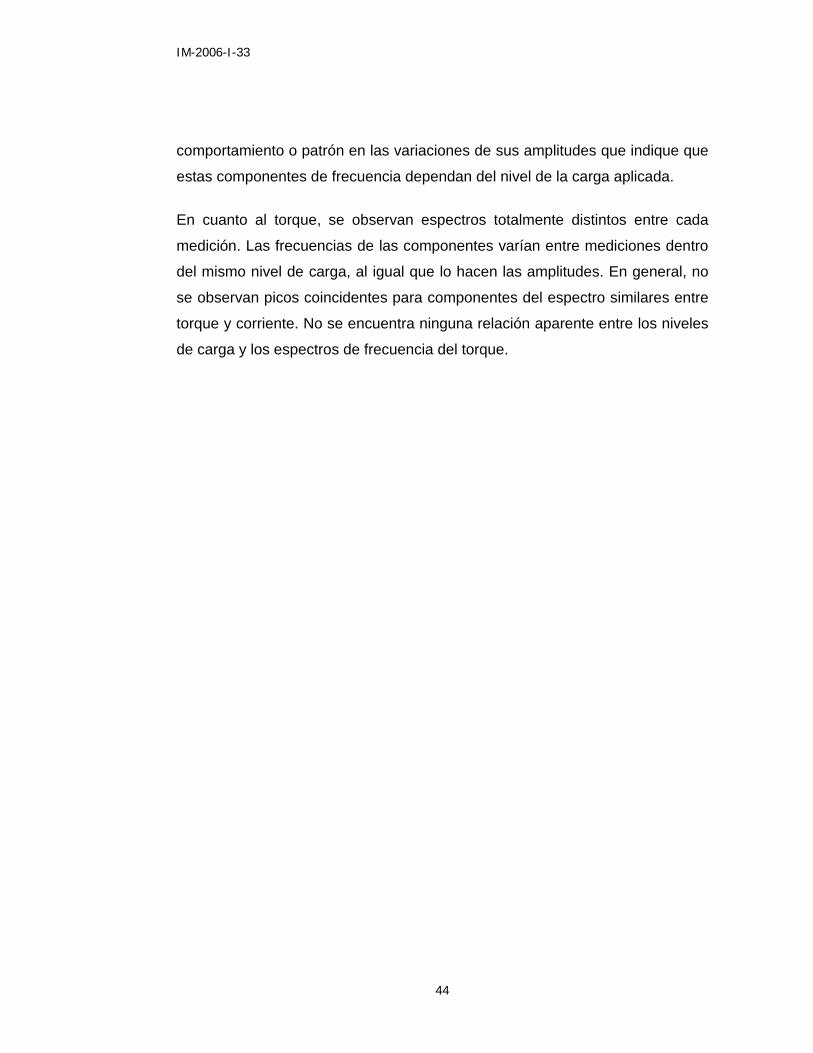
Figura 25. Espectro de frecuencia para torque con reductor bajo carga máxima (1)
IM-2006-I-33
43
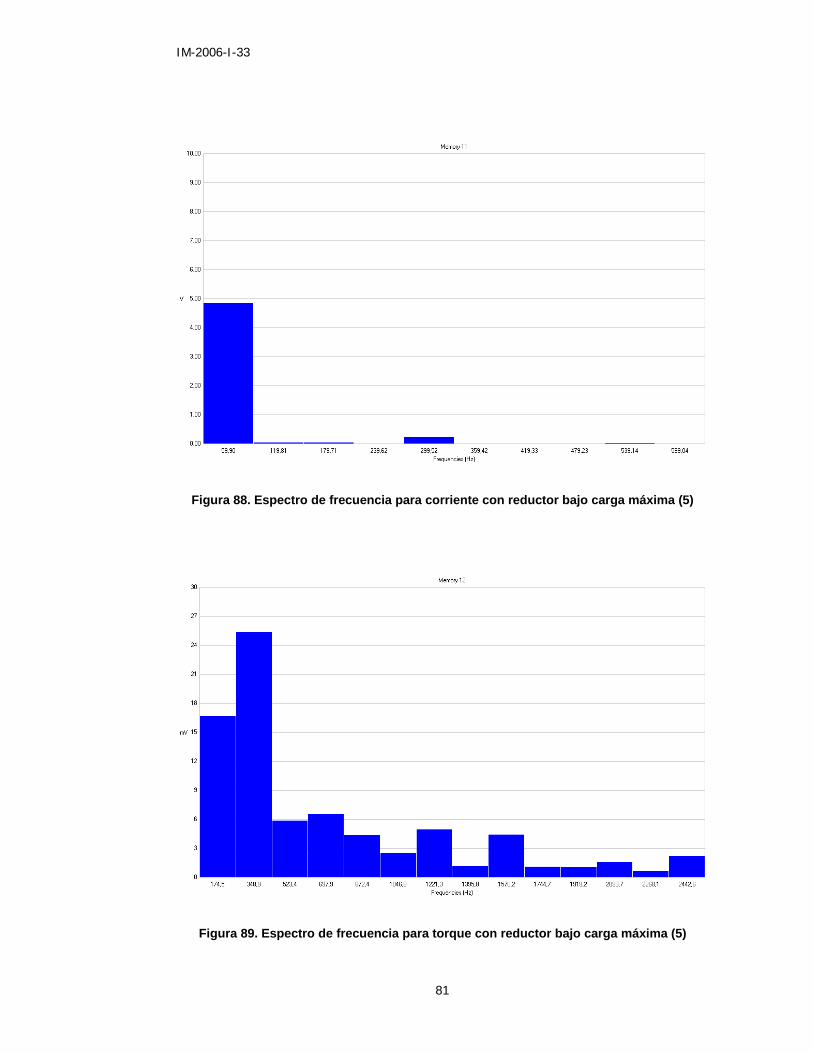
En cuanto a la corriente, se observa que las componentes de frecuencias
presentes en los espectros no varían entre las pruebas, y son las mismas tanto
para el caso sin reductor como para los tres niveles de carga con reductor. Esto
indica que el espectro de corriente no se ve afectado por la presencia de la caja
reductora. La componente más importante (la de mayor amplitud) es la
frecuencia fundamental, y en todos los casos es de alrededor de 60 Hz, que
corresponde a la frecuencia de la corriente de la toma trifásica. La siguiente
tabla muestra los valores de la amplitud de esta componente para cada uno de
los niveles de carga.
Prueba Amplitud (V)
Sin reductor 4,5
Reductor en vacío 4,6
Carga moderada 4,7
Carga máxima 4,8
Tabla 4. Amplitudes de la frecuencia fundamental de corriente
Se encuentra que a medida que incrementa la carga, también lo hace la
amplitud de esta componente de frecuencia.
La siguiente componente en importancia es cercana a 300 Hz, el quinto
armónico, aunque su amplitud es considerablemente menor que la de la
frecuencia fundamental (alrededor del 5% del valor de la frecuencia
fundamental). Esta frecuencia se encuentra presente en todas las pruebas, lo
que indica que es propia de la corriente en el motor u ocasionada por ruido en
la línea de corriente, y no está relacionada con el reductor. Se observan
también otras componentes con amplitudes mucho menores (menos del 1% del
valor de la frecuencia fundamental). Sin embargo, no se evidencia ningún
IM-2006-I-33
44
comportamiento o patrón en las variaciones de sus amplitudes que indique que
estas componentes de frecuencia dependan del nivel de la carga aplicada.
En cuanto al torque, se observan espectros totalmente distintos entre cada
medición. Las frecuencias de las componentes varían entre mediciones dentro
del mismo nivel de carga, al igual que lo hacen las amplitudes. En general, no
se observan picos coincidentes para componentes del espectro similares entre
torque y corriente. No se encuentra ninguna relación aparente entre los niveles
de carga y los espectros de frecuencia del torque.
IM-2006-I-33
45
7. CONCLUSIONES Y RECOMENDACIONES
Es indiscutible que desarrollar métodos de mantenimiento predictivo que
puedan ser utilizados mientras la maquinaria está en funcionamiento normal,
sería de gran ayuda para la industria, en todos los aspectos, tanto económicos
como funcionales y prácticos. Trabajos recientes han demostrado que es
posible detectar fallas en motores de inducción por medio de mediciones de
parámetros como el ruido y la corriente en el estator, bajo ciertas condiciones.
Asumiendo que el daño más importante presente en el reductor corresponde a
los dientes faltantes en el engrane impulsor, debería esperarse una variación
en el torque por cada diente ausente. El número de dientes faltantes es 4. De
esta manera, se esperan 4 golpes o variaciones en el torque por cada vuelta
del motor. Con el motor girando a 1700 RPM, esto equivale a 6800 variaciones
por minuto en el torque debidas a esta falla, lo que a su vez equivale a 113
variaciones por segundo, o un golpe cada 9 ms. La ventana de observación del
osciloscopio dispuesto en Autoset es de 100 ms, que representa un tiempo de
muestreo bastante amplio para el periodo de esta falla en particular. Esto
quiere decir que por cada ventana que almacene la memoria, debería haber
información presente para aproximadamente 2.8 vueltas del motor, es decir,
alrededor de 11 golpes.
En el caso de detección de fallas en el sistema detrás del motor, de acuerdo
con las pruebas realizadas en esta investigación, puede concluirse lo siguiente:
Observando todos los espectros de frecuencia del torque, en ningún caso se
encuentra una frecuencia de 113 Hz como la componente de mayor
importancia. Esto lleva a pensar que el daño más importante en el reductor
probablemente no sea causado por los engranes. Las componentes de
frecuencia presentes en el torque presentan comportamientos totalmente
aleatorios. Es posible que las fallas más importantes se localizaran en partes
IM-2006-I-33
46
como la horquilla o el sistema de posicionamiento, que son más difíciles de
detectar que las correspondientes a engranes. De esta manera, pudo
presentarse un conjunto de fallas distinto cada vez que se puso en
funcionamiento el sistema, lo que introduce un alto nivel de aleatoriedad a los
resultados. No se encontró ninguna relación aparente entre los daños
presentes en la caja de transmisión y las mediciones de corriente en el estator.
Bajo las condiciones de experimentación de este trabajo en particular, no existe
evidencia suficiente para afirmar que es posible detectar el tipo de falla en un
sistema mecánico impulsado por un motor de inducción, por medio de
mediciones de corriente en el estator.
Vale la pena anotar que al no tener disponible un sistema similar en buen
estado, es imposible tener un punto de comparación para las mediciones de las
pruebas realizadas. Adicionalmente, se encontró que los daños presentes en la
caja reductora eran demasiados e imposibles de aislar o controlar, razón por la
cual cada vez que era puesta en funcionamiento, se comportaba de una
manera distinta, lo que dificultó el proceso de análisis. Al comparar los
espectros de frecuencia de la corriente del motor para cada nivel de carga, no
existe ninguna diferencia sustancial que permita afirmar que la corriente tuvo
alguna variación, aparte del incremento en la amplitud de la frecuencia
fundamental y del voltaje pico a pico, variaciones que eran predecibles. Este
incremento en la corriente es proporcional al incremento en la potencia
requerida por el motor para generar el torque suficiente para un nivel de carga
mayor. Este hecho indica que la base hipotética de este trabajo efectivamente
se cumple. Si la corriente aumenta para niveles de carga cada vez mayores,
debería estar presente en el espectro una componente relacionada con los
incrementos en las solicitudes de torque producto de los golpes debidos a los
daños. Esto lleva a pensar que el diseño del experimento y las condiciones de
experimentación no fueron del todo adecuados.
IM-2006-I-33
47
Se encontró que la corriente presenta bajo todas las condiciones, el espectro
de frecuencia esperado, que corresponde al de la corriente proveniente de una
toma trifásica común.
El propósito principal de este trabajo fue encontrar indicios de alguna relación
que existente entre la corriente en el estator y los daños presentes en el
sistema. Es claro que las condiciones bajo las cuales se desarrolló esta
investigación no fueron óptimas, lo cual pudo contribuir a los resultados
negativos. Teniendo en cuenta el tipo de ruido sonoro apreciado durante el
funcionamiento del sistema, que presentaba golpes cíclicos identificables por el
oído con frecuencias de alrededor de 2 segundos, es posible que los tiempos
de muestreo hayan sido demasiado cortos para evidenciar alguna falla cíclica
presente en el reductor que coincidiera con las percibidas por el oído. Se
descarta la posibilidad de que la pinza de corriente no haya tenido la precisión
suficiente para captar los cambios en la señal de corriente, pues es capaz de
detectar cambios de tan solo 50 mA. Adicionalmente, la función Autoset
identifica la señal de corriente a partir de la frecuencia fundamental y de mayor
importancia, es decir, la componente de 60 Hz, lo cual hace que de alguna
manera las componentes más pequeñas del espectro se vean enmascaradas y
opacadas, lo que no permite identificarlas. Valdría la pena desarrollar nuevos
procedimientos de medición para los mismos experimentos tomando en cuenta
los resultados obtenidos en este trabajo, utilizando un sistema en buen estado
para inducir fallas controladas y progresivas, y analizar los cambios presentes
en las señales medidas. Considerando las fallas percibidas por el oído con una
frecuencia de 0.5 Hz, El tiempo de muestreo debería almacenar por lo menos
una onda completa, es decir, la ventana de observación debería ser de al
menos 2 segundos, valor que debería ser preferiblemente mayor en aras de
obtener información más detallada.
Sería conveniente también tomar mediciones de ruido, y comparar estos dos
métodos alternativos para saber cómo se complementan y bajo qué
condiciones es posible emplearlos. De igual manera podrían combinarse estas
IM-2006-I-33
48
mediciones con mediciones de vibración, para tener una base de comparación
confiable.

IM-2006-I-33
49
REFERENCIAS BIBLIOGRÁFICAS
[1] LLOYD, T. C., Electric Motors and Their Applications. 1a ed., John Wiley
& Sons Inc., 1969.
[2] CHAPMAN, S. J., Electric Machinery and Power System Fundamentals.
1a ed., McGraw-Hill., 2002.
[3] BEATY, H. W., KIRTLEY, J. L., Manual del Motor Eléctrico. 1a ed.,
McGraw-Hill., 2000.
[4] Ballestas, C.A. (1999). Relación entre el ruido emitido por maquinaria y
el mal funcionamiento mecánico. Tesis de maestría. Universidad de los
Andes, Bogotá, Colombia.
[5] Caballero, H. (2000)). Diseño y desarrollo de un sistema de monitoreo de
condición para motores de inducción A.C. Tesis de maestría.
Universidad de los Andes, Bogotá, Colombia.
[6] MARTELO, A. L. (2000). Detección de fallas en rodamientos de bolas de
motores eléctricos mediante análisis espectral de vibraciones, ruido y
corriente de estator. Tesis de maestría. Universidad de los Andes,
Bogotá, Colombia.
[7] SIEMENS AC Motor Basics tutorial. 2002 Página web,
http://www.sea.siemens.com/step/templates/lesson.mason?motors.
IM-2006-I-33
50
ANEXO 1: RESULTADOS ADICIONALES DE MEDICIONES
Figura 26. Gráfica de corriente contra tiempo sin reductor (2)
Figura 27. Gráfica de torque contra tiempo sin reductor (2)

IM-2006-I-33
51
Figura 28. Gráfica de corriente contra tiempo sin reductor (3)
Figura 29. Gráfica de torque contra tiempo sin reductor (3)
IM-2006-I-33
52
Figura 30. Gráfica de corriente contra tiempo sin reductor (4)
Figura 31. Gráfica de torque contra tiempo sin reductor (4)
IM-2006-I-33
53
Figura 32. Gráfica de corriente contra tiempo sin reductor (5)
Figura 33. Gráfica de torque contra tiempo sin reductor (5)
IM-2006-I-33
54
Figura 34. Gráfica de corriente contra tiempo con reductor en vacío (2)
Figura 35. Gráfica de torque contra tiempo con reductor en vacío (2)

IM-2006-I-33
55
Figura 36. Gráfica de corriente contra tiempo con reductor en vacío (3)
Figura 37. Gráfica de torque contra tiempo con reductor en vacío (3)
IM-2006-I-33
56
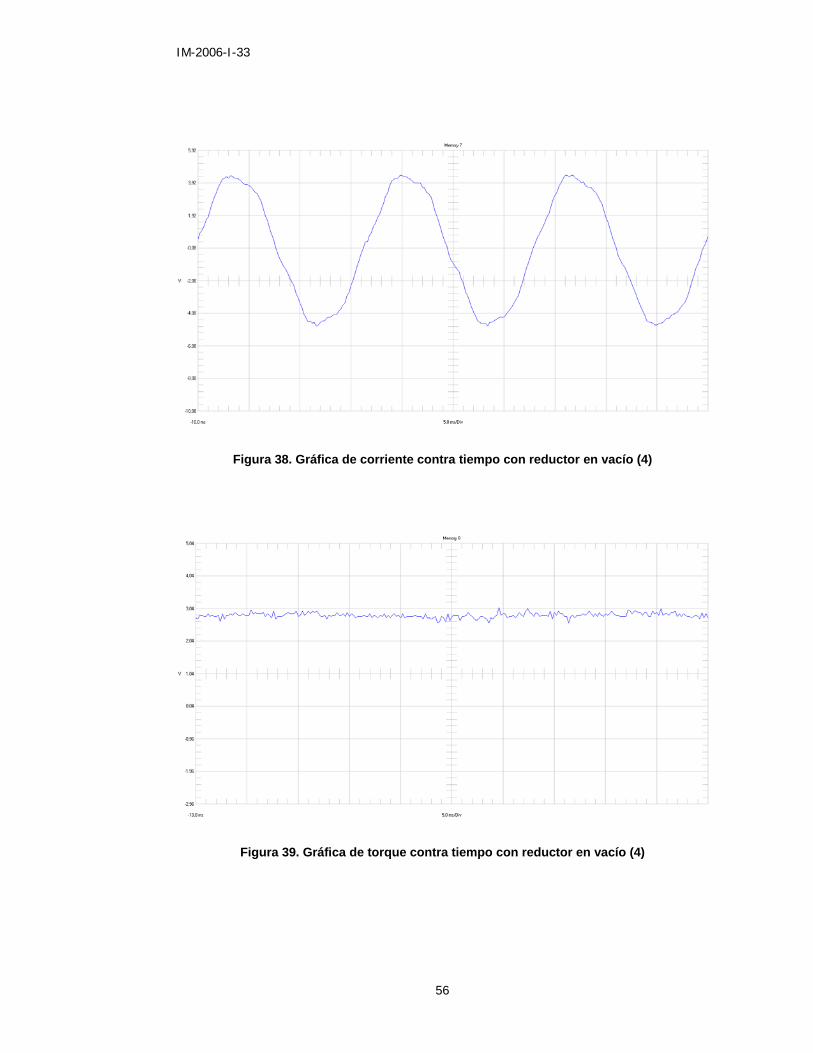
Figura 38. Gráfica de corriente contra tiempo con reductor en vacío (4)
Figura 39. Gráfica de torque contra tiempo con reductor en vacío (4)
IM-2006-I-33
57
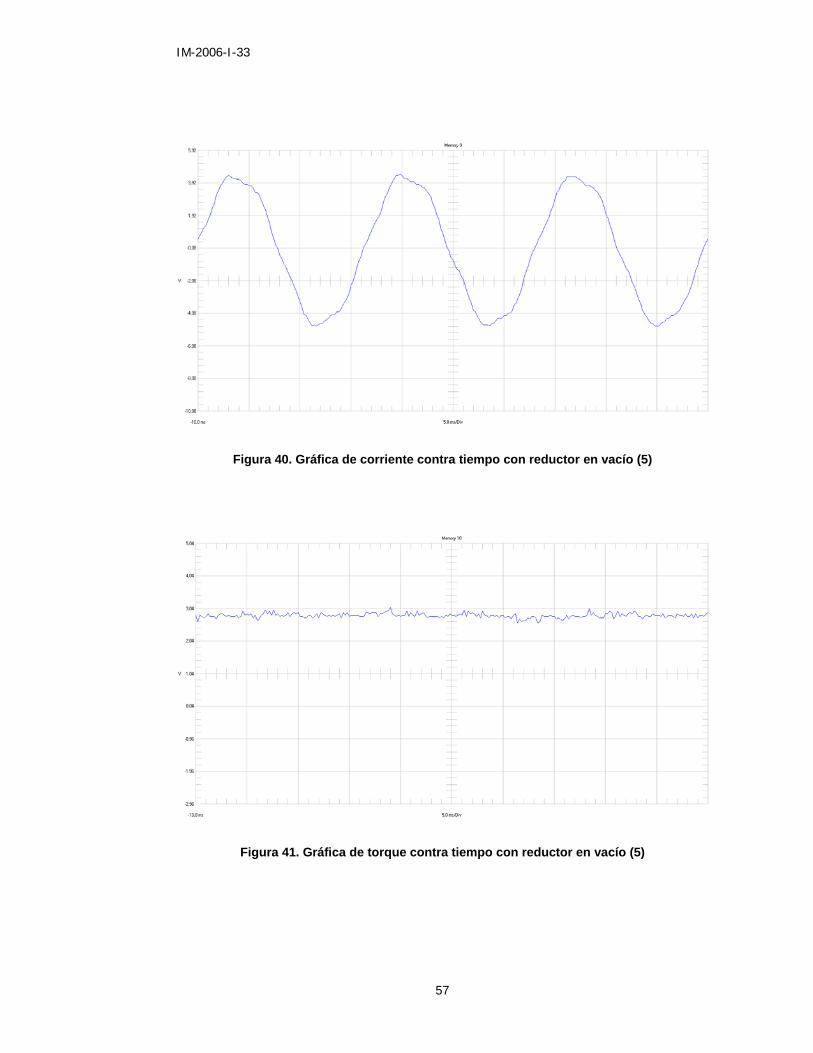
Figura 40. Gráfica de corriente contra tiempo con reductor en vacío (5)
Figura 41. Gráfica de torque contra tiempo con reductor en vacío (5)
IM-2006-I-33
58
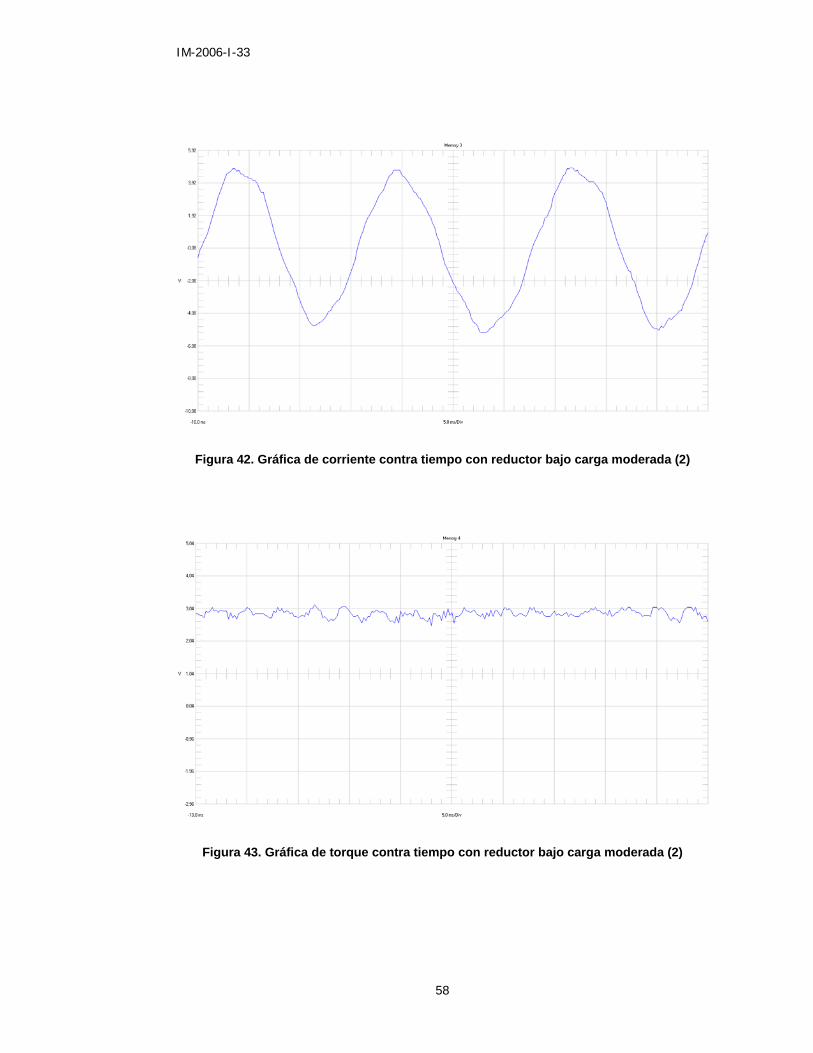
Figura 42. Gráfica de corriente contra tiempo con reductor bajo carga moderada (2)
Figura 43. Gráfica de torque contra tiempo con reductor bajo carga moderada (2)

IM-2006-I-33
59
Figura 44. Gráfica de corriente contra tiempo con reductor bajo carga moderada (3)
Figura 45. Gráfica de torque contra tiempo con reductor bajo carga moderada (3)
IM-2006-I-33
60
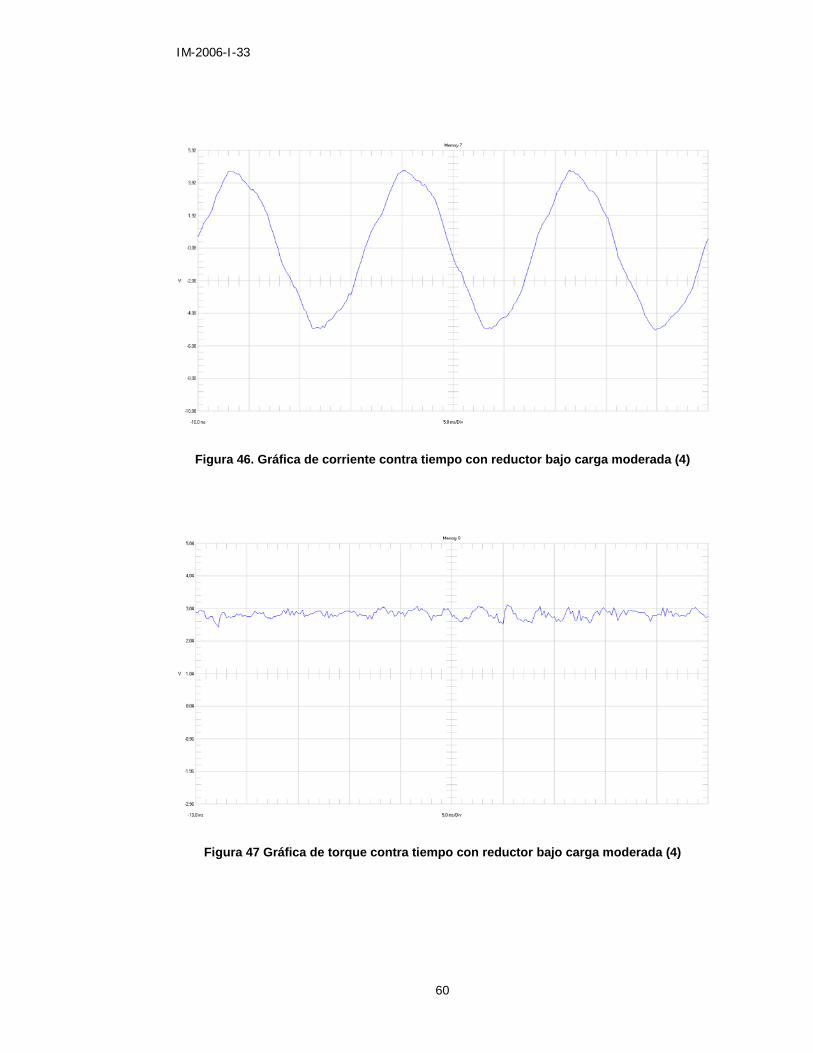
Figura 46. Gráfica de corriente contra tiempo con reductor bajo carga moderada (4)
Figura 47 Gráfica de torque contra tiempo con reductor bajo carga moderada (4)
IM-2006-I-33
61
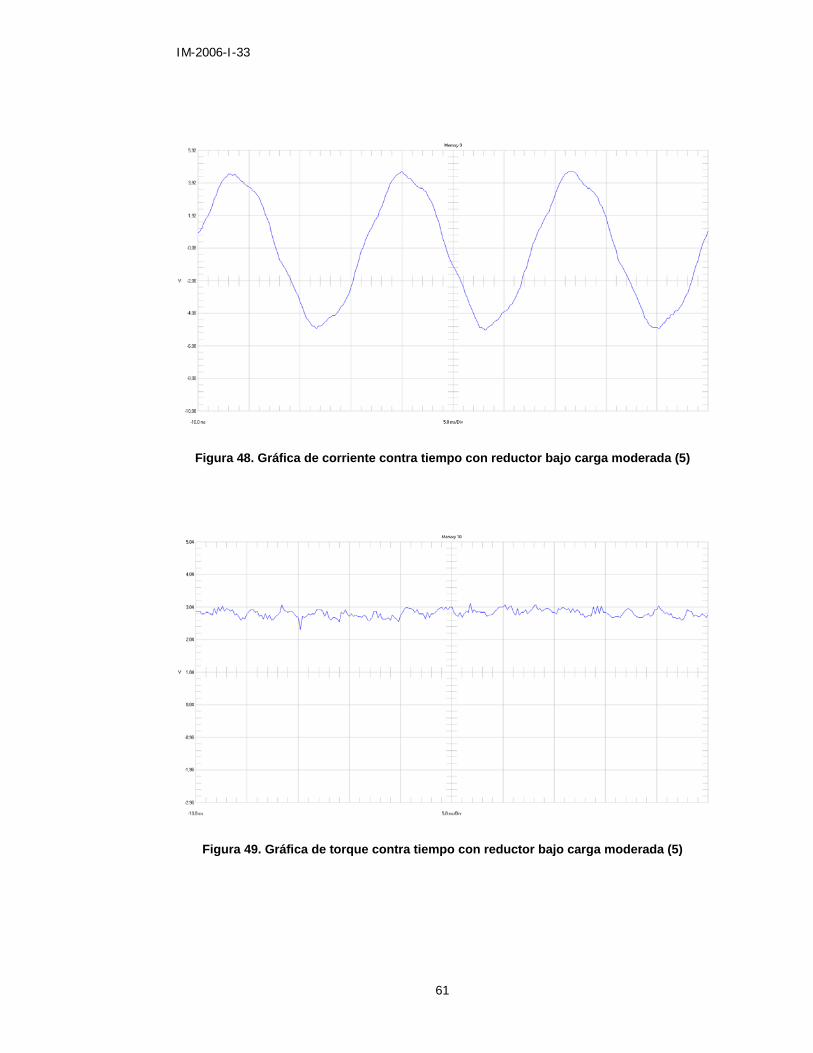
Figura 48. Gráfica de corriente contra tiempo con reductor bajo carga moderada (5)
Figura 49. Gráfica de torque contra tiempo con reductor bajo carga moderada (5)
IM-2006-I-33
62
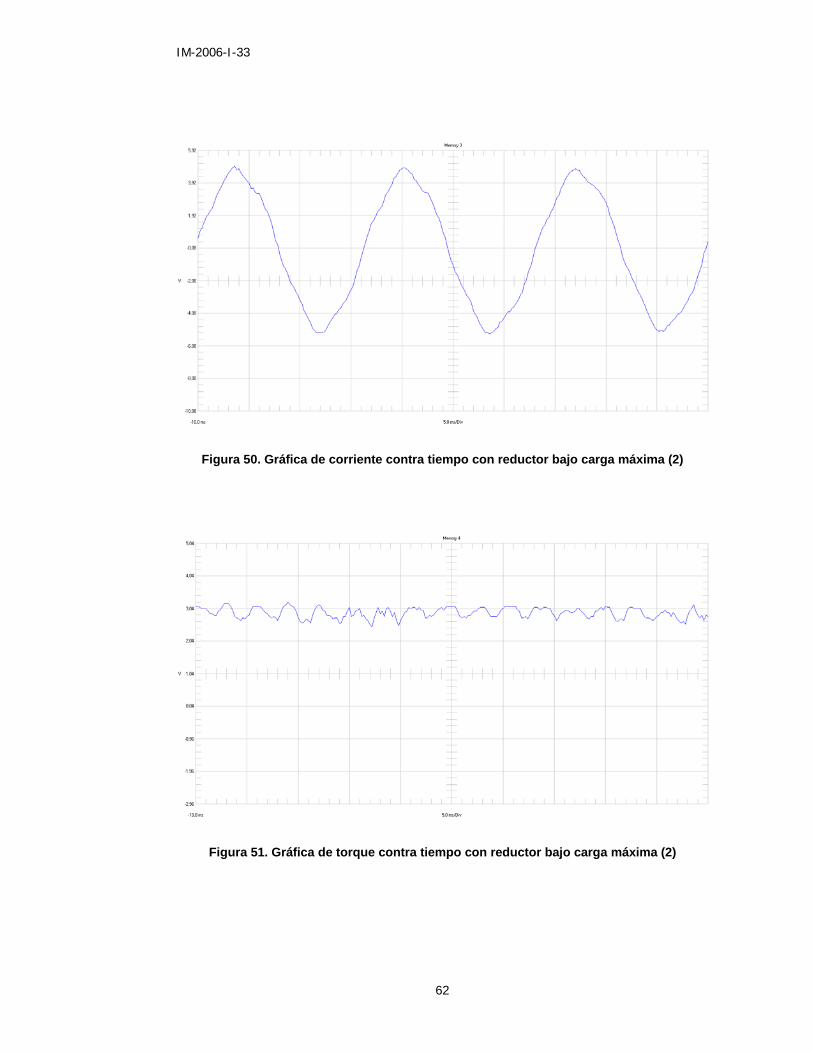
Figura 50. Gráfica de corriente contra tiempo con reductor bajo carga máxima (2)
Figura 51. Gráfica de torque contra tiempo con reductor bajo carga máxima (2)
IM-2006-I-33
63
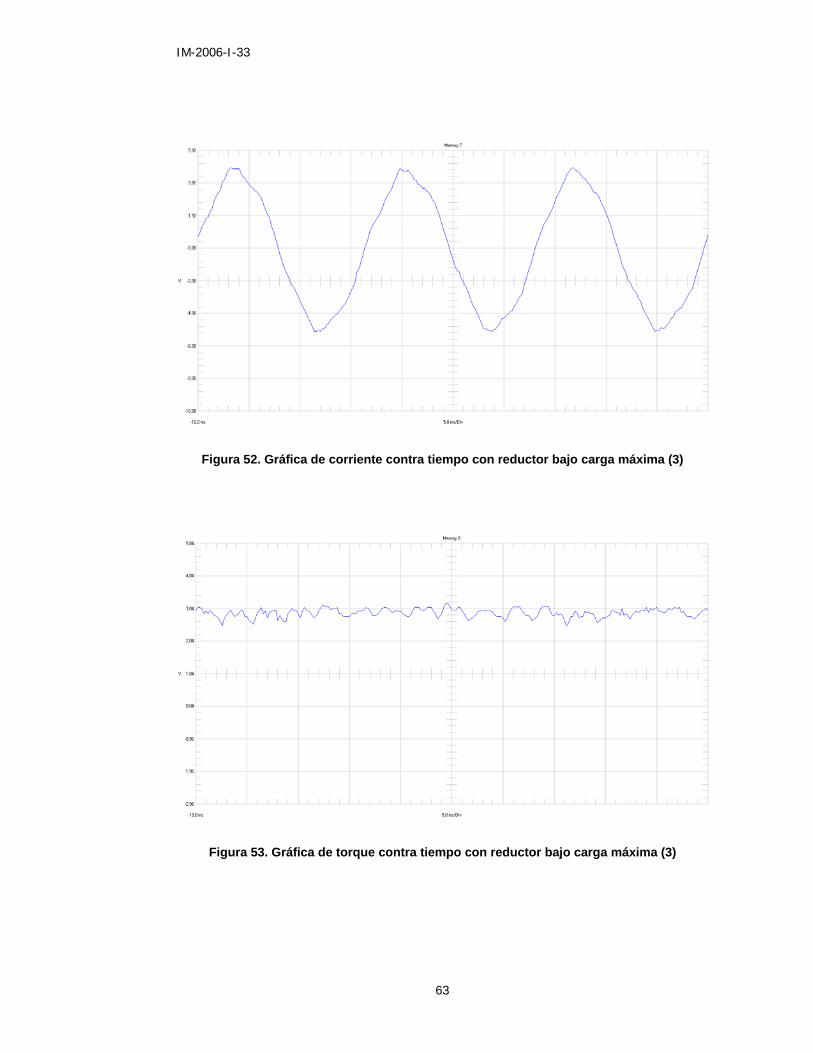
Figura 52. Gráfica de corriente contra tiempo con reductor bajo carga máxima (3)
Figura 53. Gráfica de torque contra tiempo con reductor bajo carga máxima (3)
IM-2006-I-33
64
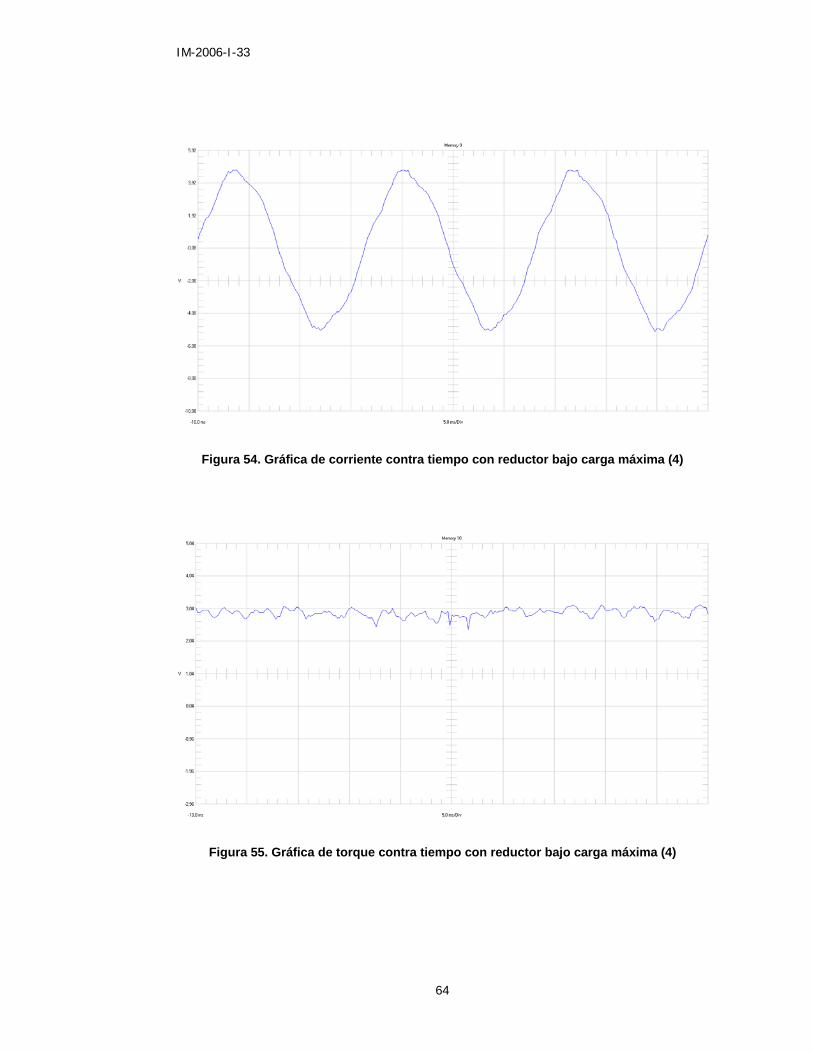
Figura 54. Gráfica de corriente contra tiempo con reductor bajo carga máxima (4)
Figura 55. Gráfica de torque contra tiempo con reductor bajo carga máxima (4)
IM-2006-I-33
65
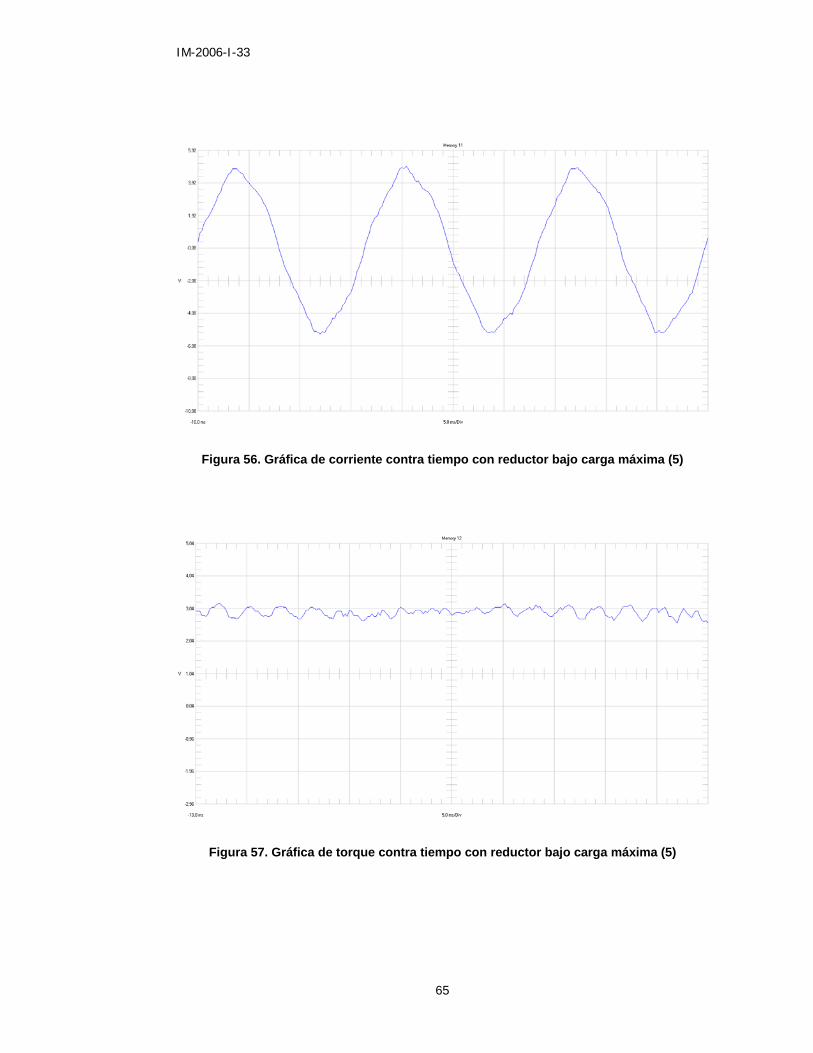
Figura 56. Gráfica de corriente contra tiempo con reductor bajo carga máxima (5)
Figura 57. Gráfica de torque contra tiempo con reductor bajo carga máxima (5)
IM-2006-I-33
66
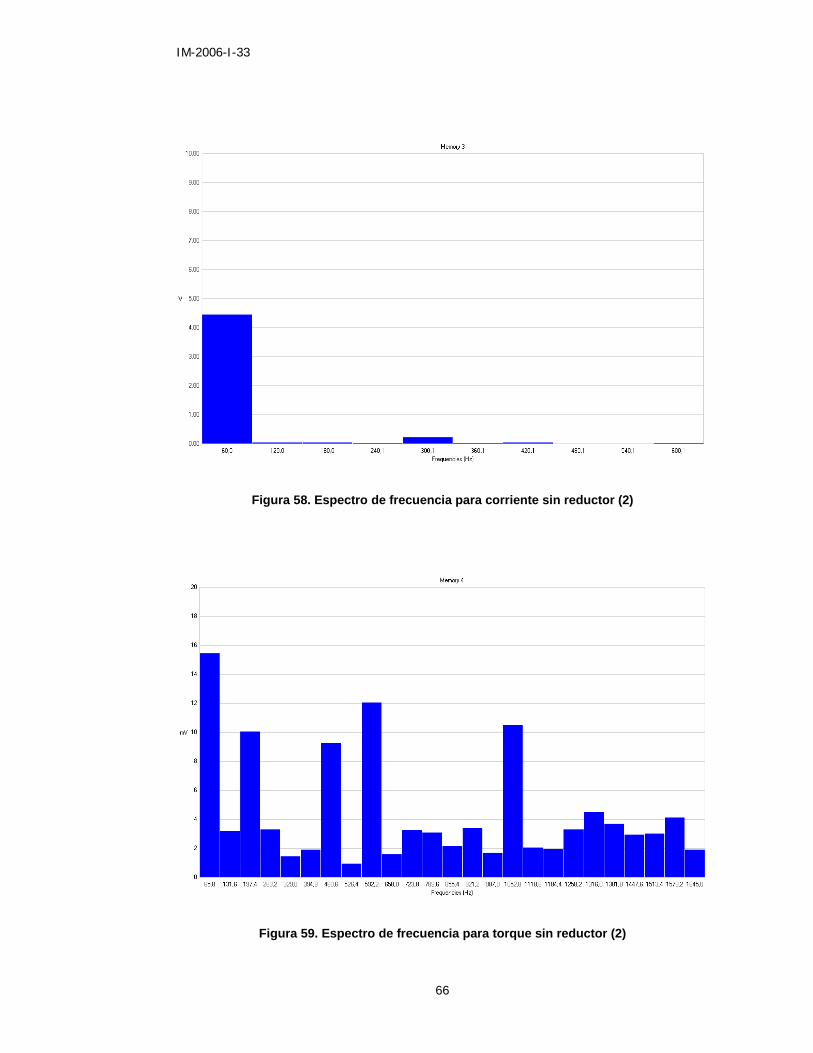
Figura 58. Espectro de frecuencia para corriente sin reductor (2)
Figura 59. Espectro de frecuencia para torque sin reductor (2)
IM-2006-I-33
67
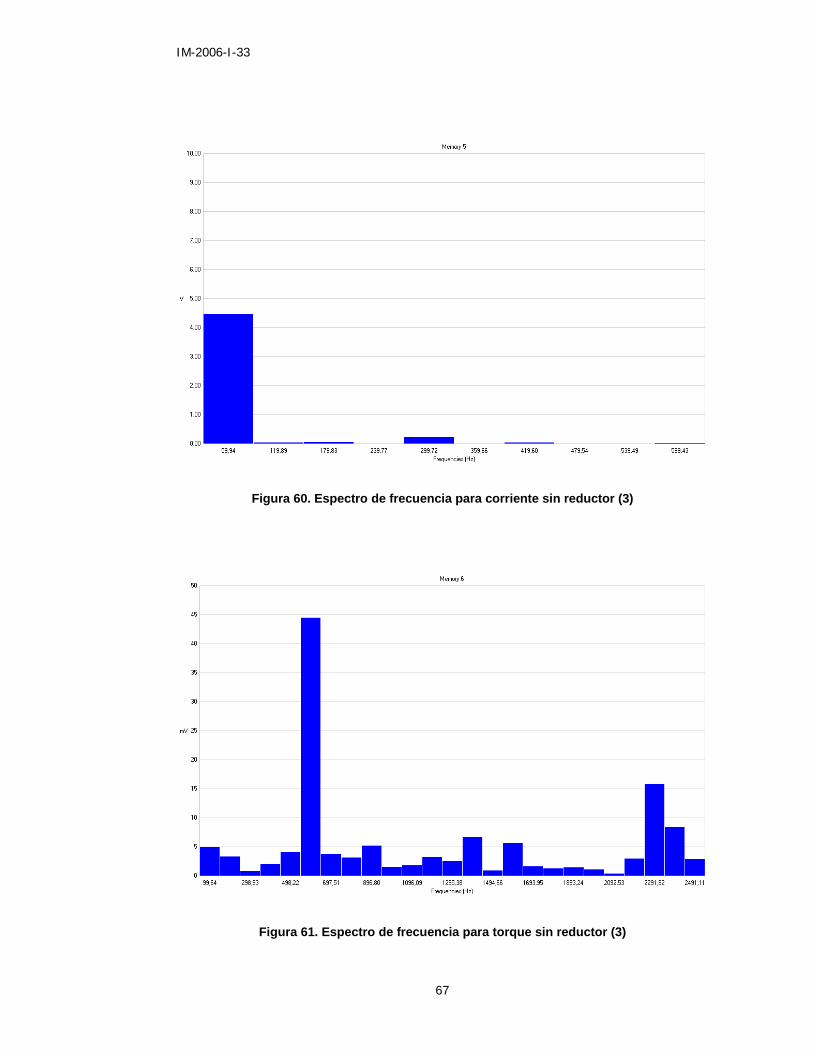
Figura 60. Espectro de frecuencia para corriente sin reductor (3)
Figura 61. Espectro de frecuencia para torque sin reductor (3)
IM-2006-I-33
68
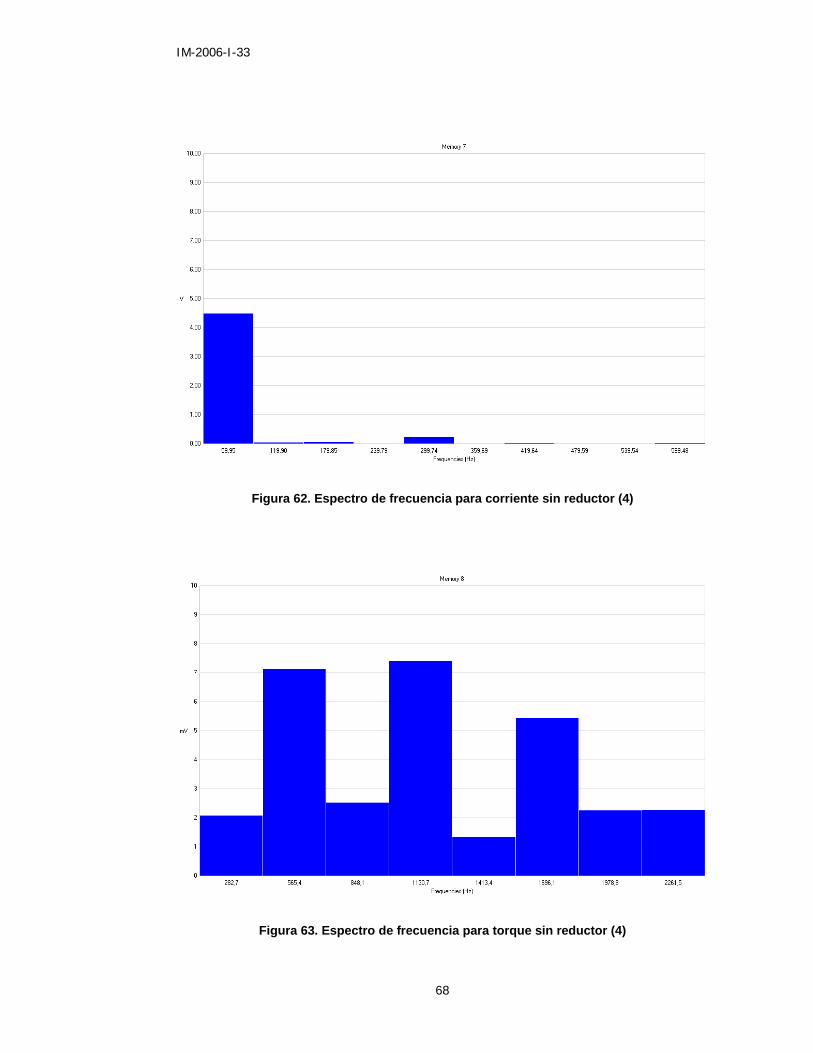
Figura 62. Espectro de frecuencia para corriente sin reductor (4)
Figura 63. Espectro de frecuencia para torque sin reductor (4)
IM-2006-I-33
69
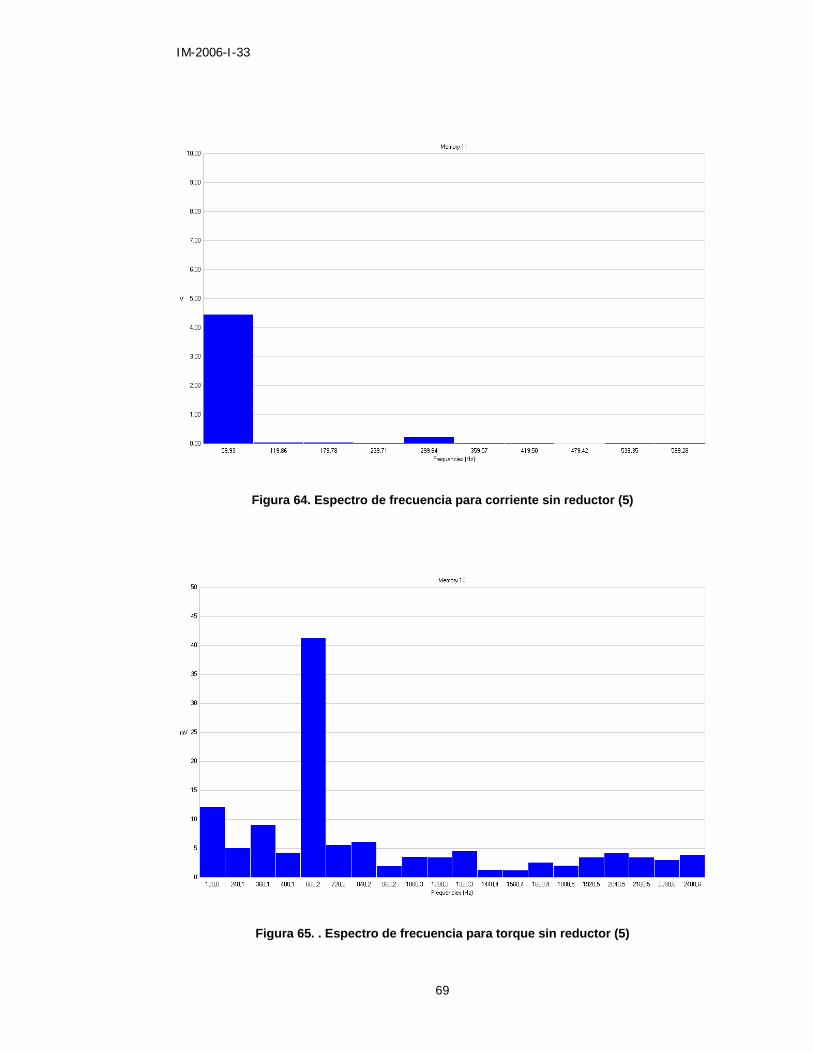
Figura 64. Espectro de frecuencia para corriente sin reductor (5)
Figura 65. . Espectro de frecuencia para torque sin reductor (5)

IM-2006-I-33
70
Figura 66. Espectro de frecuencia para corriente con reductor en vacío (2)
Figura 67. Espectro de frecuencia para torque con reductor en vacío (2)
IM-2006-I-33
71
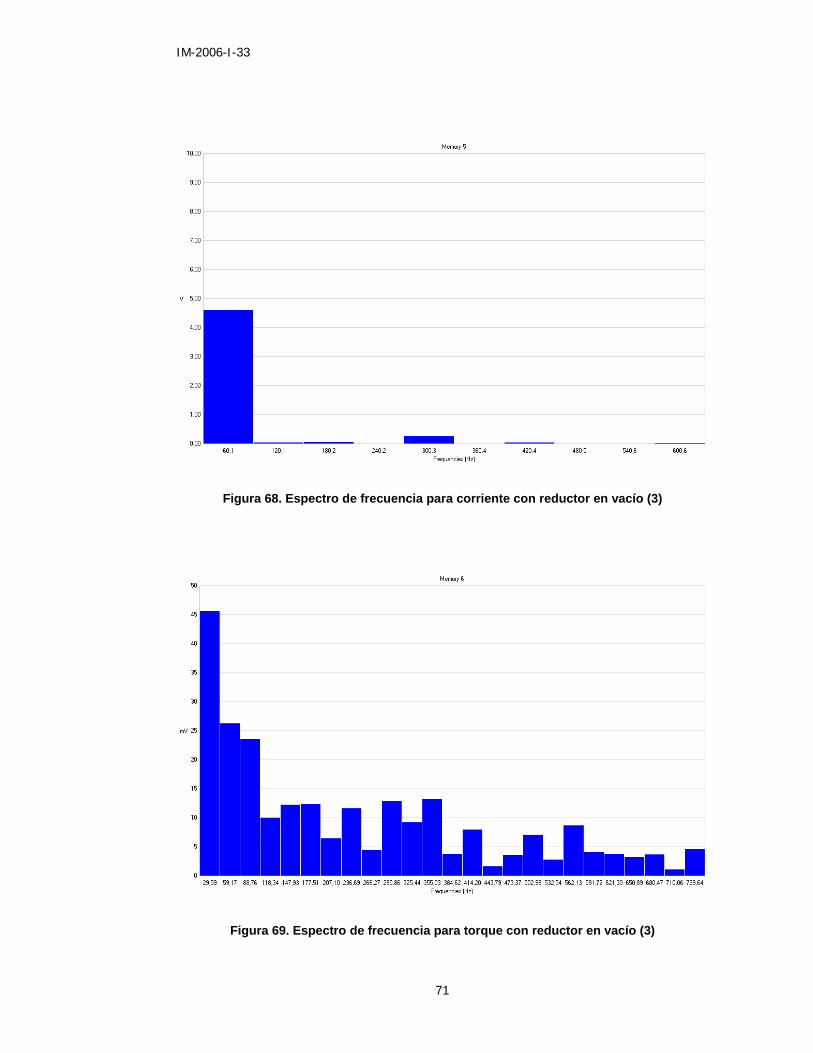
Figura 68. Espectro de frecuencia para corriente con reductor en vacío (3)
Figura 69. Espectro de frecuencia para torque con reductor en vacío (3)

IM-2006-I-33
72
Figura 70. Espectro de frecuencia para corriente con reductor en vacío (4)
Figura 71. Espectro de frecuencia para torque con reductor en vacío (4)
IM-2006-I-33
73
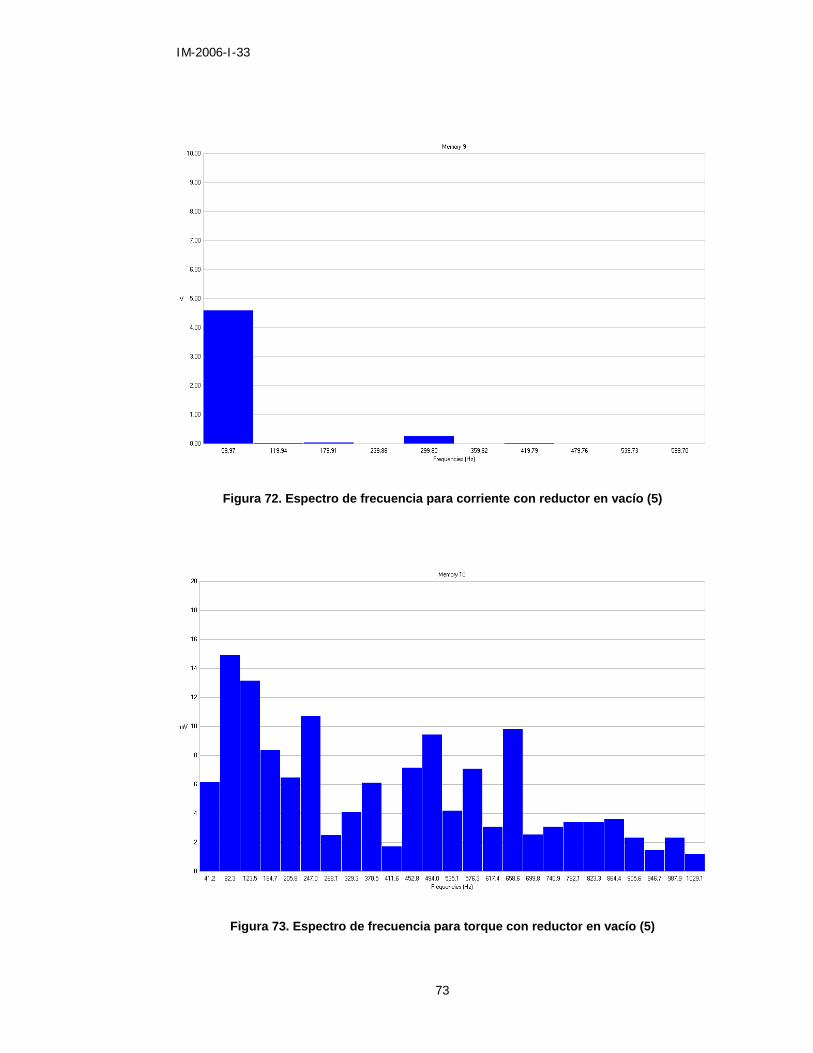
Figura 72. Espectro de frecuencia para corriente con reductor en vacío (5)
Figura 73. Espectro de frecuencia para torque con reductor en vacío (5)

IM-2006-I-33
74
Figura 74. Espectro de frecuencia para corriente con reductor bajo carga moderada (2)
Figura 75. Espectro de frecuencia para torque con reductor bajo carga moderada (2)
IM-2006-I-33
75
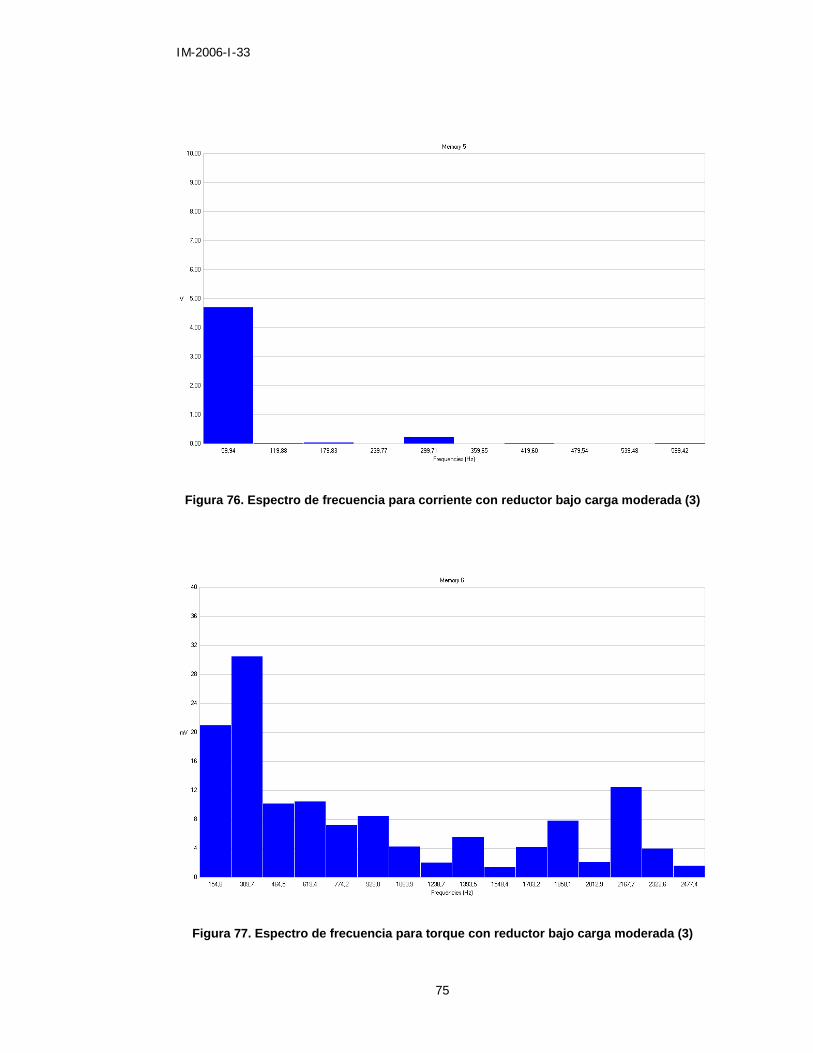
Figura 76. Espectro de frecuencia para corriente con reductor bajo carga moderada (3)
Figura 77. Espectro de frecuencia para torque con reductor bajo carga moderada (3)
IM-2006-I-33
76
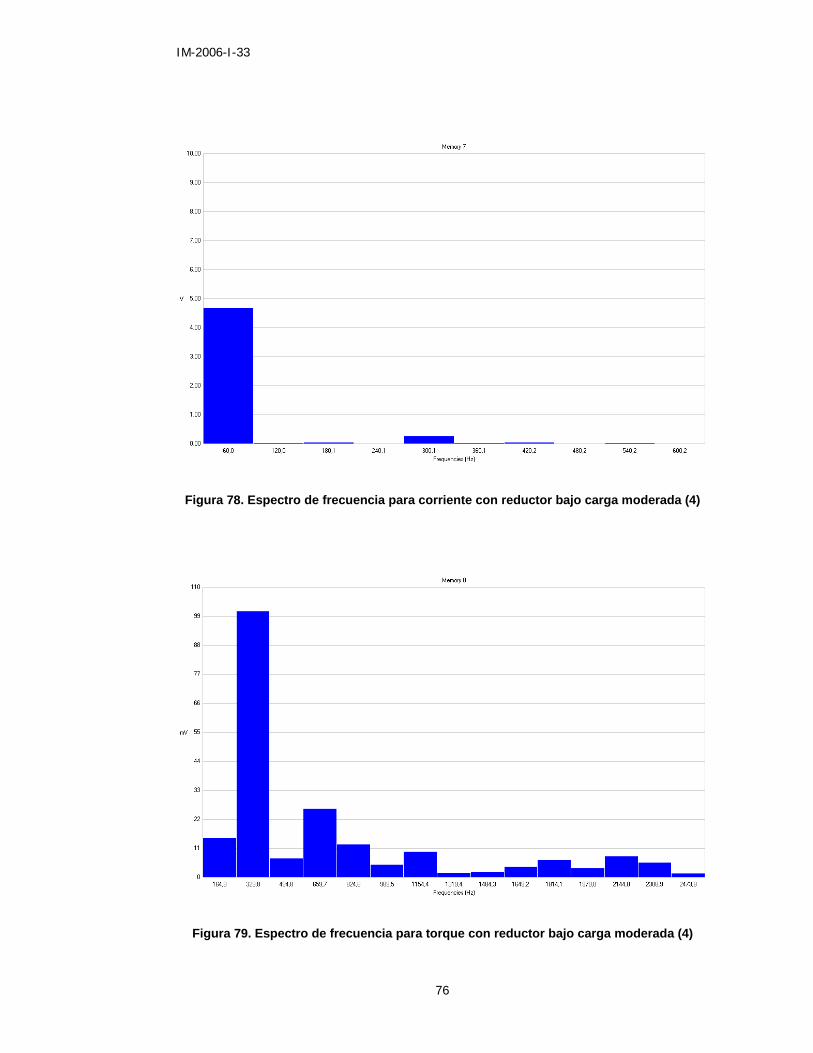
Figura 78. Espectro de frecuencia para corriente con reductor bajo carga moderada (4)
Figura 79. Espectro de frecuencia para torque con reductor bajo carga moderada (4)
IM-2006-I-33
77
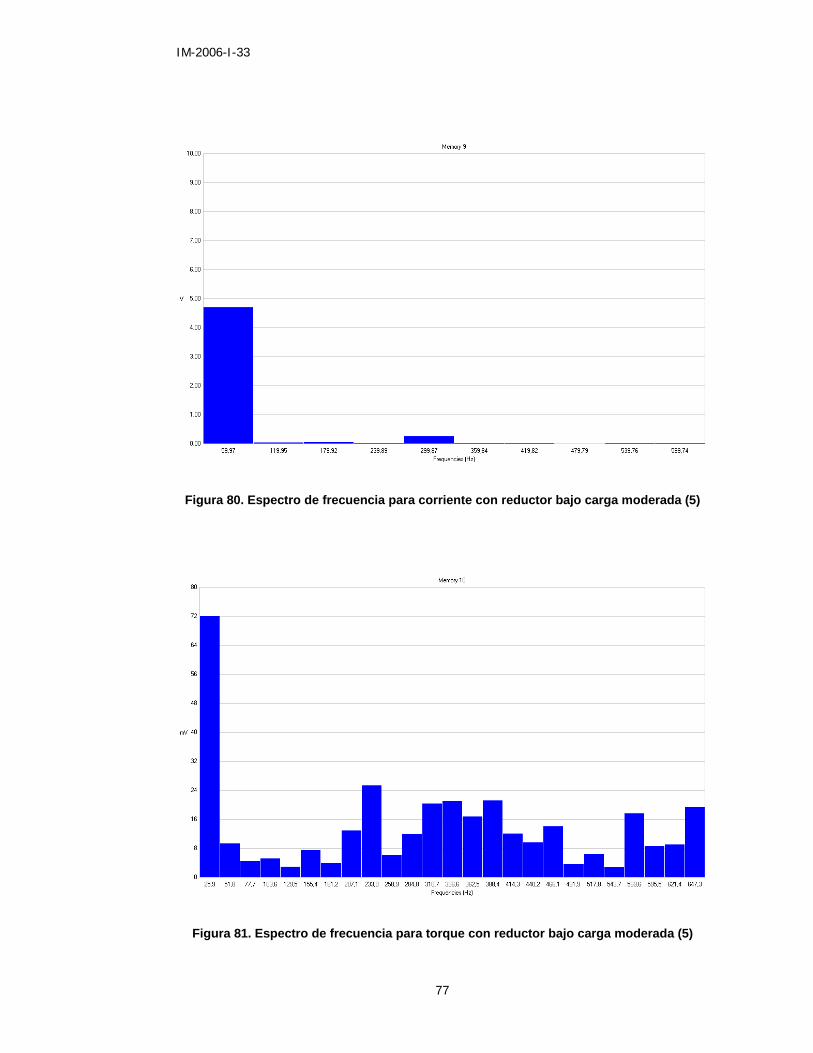
Figura 80. Espectro de frecuencia para corriente con reductor bajo carga moderada (5)
Figura 81. Espectro de frecuencia para torque con reductor bajo carga moderada (5)
IM-2006-I-33
78
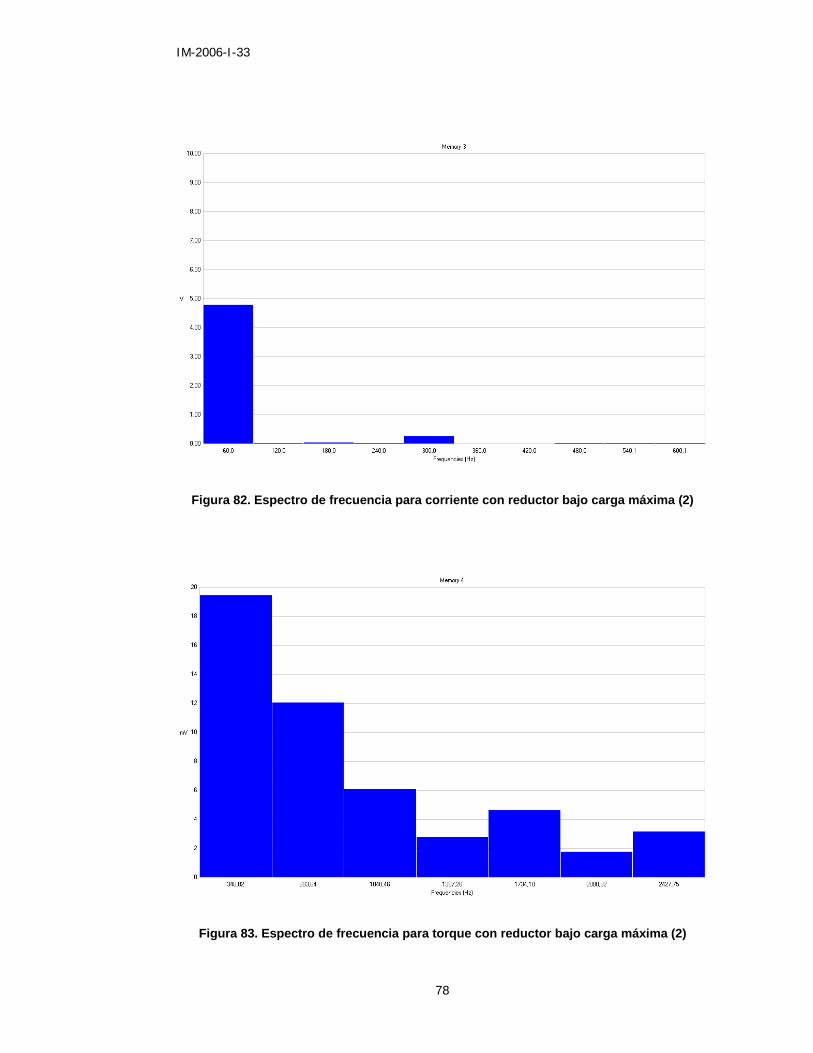
Figura 82. Espectro de frecuencia para corriente con reductor bajo carga máxima (2)
Figura 83. Espectro de frecuencia para torque con reductor bajo carga máxima (2)
IM-2006-I-33
79
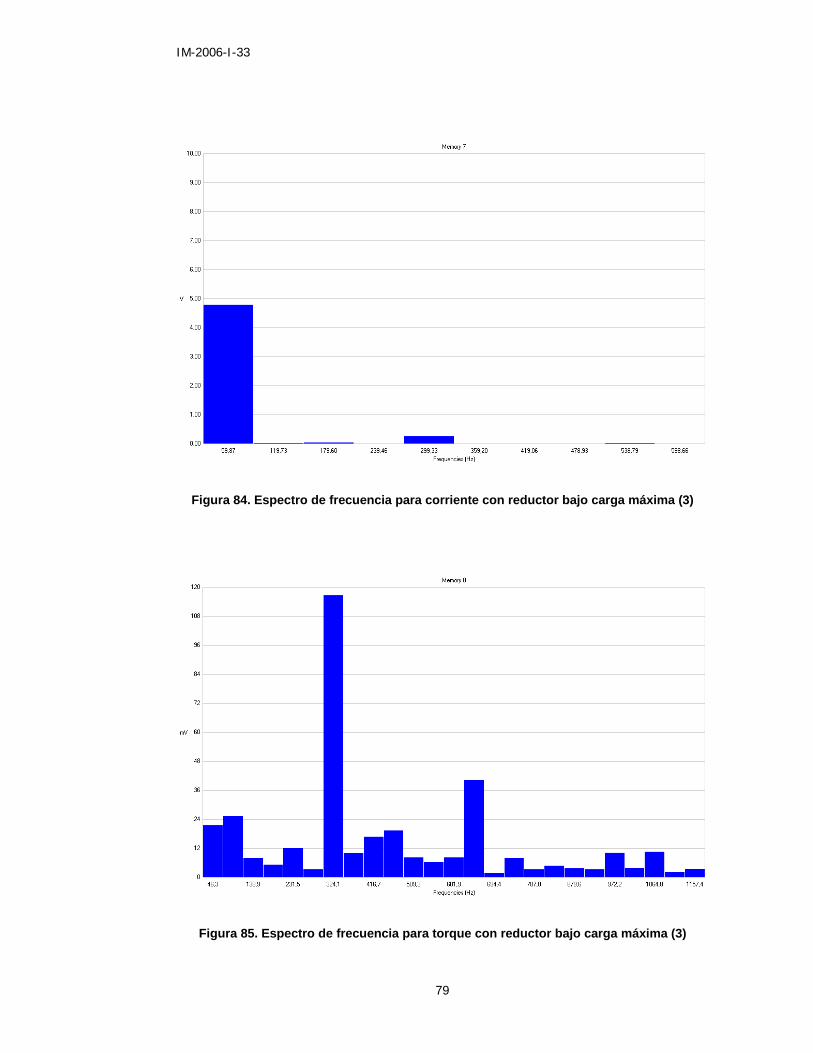
Figura 84. Espectro de frecuencia para corriente con reductor bajo carga máxima (3)
Figura 85. Espectro de frecuencia para torque con reductor bajo carga máxima (3)

IM-2006-I-33
80
Figura 86. Espectro de frecuencia para corriente con reductor bajo carga máxima (4)
Figura 87. Espectro de frecuencia para torque con reductor bajo carga máxima (4)
IM-2006-I-33
81
Figura 88. Espectro de frecuencia para corriente con reductor bajo carga máxima (5)
Figura 89. Espectro de frecuencia para torque con reductor bajo carga máxima (5)
IM-2006-I-33
82
ANEXO 2: ESPECIFICACIONES TÉCNICAS DE LA PINZA AMPERIMÉTRICA AEMC AC/DC CURRENT PROBE SL261
3
3 Tomado de http://www.aemc.com/products/pdf/1201.51.pdf


















