
DESARROLLO DE UN SISTEMA DE DOSIFICACIÓN AUTOMÁTICO DE ...
116
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA "DESARROLLO DE UN SISTEMA DE DOSIFICACIÓN AUTOMÁTICO DE ALIMENTOS PARA EQUINOS" Para obtener el Título de: Ingeniero en Control y Automatización Presentan: Franco Guzmán Luis Fernando Galicia Jiménez Jesús Rodolfo Ostria Valle Diana Asesores: Ing. Guglielmi Ibarra Ulises M. en C. Brito Barrera Leandro México DF, Noviembre 2010
Transcript of DESARROLLO DE UN SISTEMA DE DOSIFICACIÓN AUTOMÁTICO DE ...

INSTITUTO POLITÉCNICO NACIONAL
ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA
"DESARROLLO DE UN SISTEMA DE DOSIFICACIÓN AUTOMÁTICO DE ALIMENTOS PARA EQUINOS"
Para obtener el Título de:
Ingeniero en Control y Automatización
Presentan:
Franco Guzmán Luis Fernando Galicia Jiménez Jesús Rodolfo
Ostria Valle Diana
Asesores:
Ing. Guglielmi Ibarra Ulises
M. en C. Brito Barrera Leandro
México DF, Noviembre 2010

“ D E S A R R O L L O D E U N S I S T E M A D E D O S I F I C A C I Ó N A U T O M Á T I C O D E A L I M E N T O S P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | i i














“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1
CAPÍTULO 1
Dosificadores de Alimento para Equinos
El propósito del capítulo es el marcar los fundamentos teóricos de los diferentes procesos de alimentación: manual y automático para entender el funcionamiento del dispositivo, así como conceptos básicos que nos permitan comprender de una manera más clara la presente tesis.



“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4
Un caballo de trabajo duro es aquel que tienen un mínimo de trabajo de 4 horas diarias y que realizan
recorridos de aproximadamente de 100 kilómetros. Aquí consideramos también a los caballos de
competencias avanzadas en los que se requieren entrenamientos diarios para poder completar
recorridos de más de 20km al galope. La siguiente gráfica nos enseña la ingesta que debe de tener:
Figura1.1AlimentacióndeCaballosparaCompetenciasAvanzadas 1.1.3CaracterísticasdelAlimento Una buena alimentación sólo se determina con la experiencia la ración exacta, de acuerdo al tipo de
caballo y las tareas que realiza, sin embargo debe tomarse como base que la cantidad diaria de
ingestión de un animal domesticado debe ser en peso a la cantidad que consumiría si se encontrara
en libertad.
Para llevar acabó las pruebas de verificación y ajuste de tiempo de la máquina, se tomaron en cuenta
2 tipos de alimentos, considerando los más comerciales en el mundo de la equitación de alto
rendimiento.




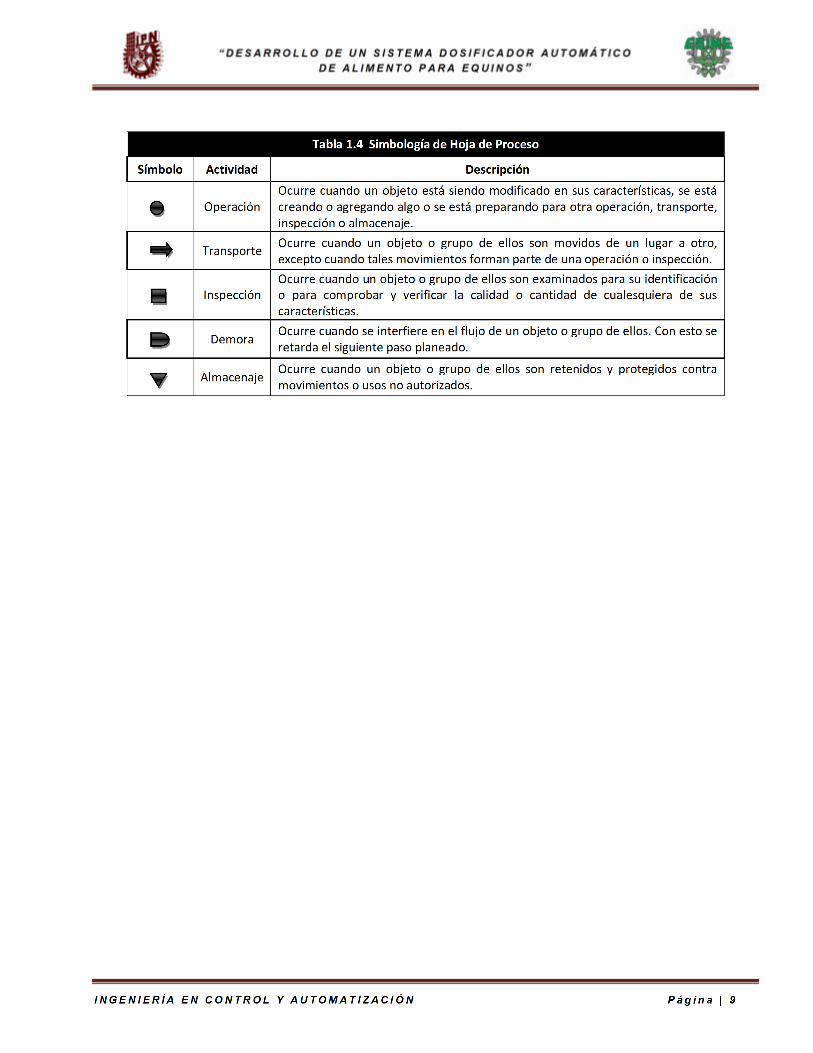
En la Tabla 1.3 se muestra la hoja del proceso manual de dosificación de alimento para caballos de
alto rendimiento, en la Tabla 1.4 se muestra la simbología y descripción de las operaciones para
complementar y entender mejor el proceso de dosificación manual para caballos de alto rendimiento.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 0
1.2ProcesodeAlimentaciónAutomático Hoy en día, los nuevos mecanismos y formas de control nos acercan la posibilidad de tener un caballo
en las afueras sin tener que ir todos los días a darle la ración de alimento que necesita. Ya que se
puede realizar el desarrollo de un sistema dosificador automático de alimento, el cual nos permitirá
darle al caballo las porciones a las horas más adecuadas. Con el dosificador automatizado, la costosa
tarea de alimentar adecuadamente al caballo, queda supeditada al simple llenado de la tolva.
En muchas ocasiones los establos o boxes donde los animales se resguardan de la intemperie se
encuentran en pleno campo y a distancias considerables del núcleo de población donde vivimos, esto
nos obliga a desplazadnos diariamente una o varias veces para que el animal o animales reciban su
ración de alimento adecuadamente.
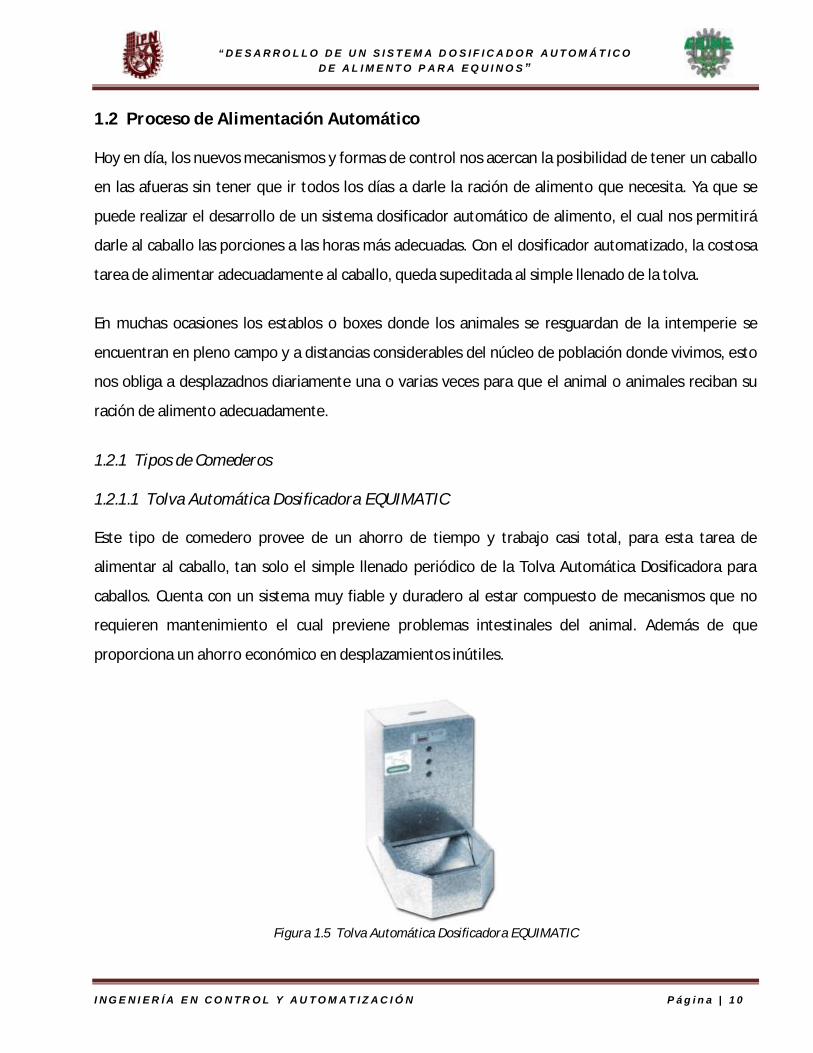
1.2.1TiposdeComederos 1.2.1.1TolvaAutomáticaDosificadoraEQUIMATIC Este tipo de comedero provee de un ahorro de tiempo y trabajo casi total, para esta tarea de
alimentar al caballo, tan solo el simple llenado periódico de la Tolva Automática Dosificadora para
caballos. Cuenta con un sistema muy fiable y duradero al estar compuesto de mecanismos que no
requieren mantenimiento el cual previene problemas intestinales del animal. Además de que
proporciona un ahorro económico en desplazamientos inútiles.
Figura1.5TolvaAutomáticaDosificadoraEQUIMATIC


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 2
programa el tiempo en segundos en que estará activado el motor a la hora programada. El tiempo
que se establece es el mismo para los tres programas.
1.2.1.2DispensadorAutomáticodePiensos Este es un dispensador automático de piensos para la alimentación de ganado, caballos, perros, vacas,
etcétera.
Figura1.6DispensadorAutomáticodePiensos
Funcionamiento,CaracterísticasyCapacidad Su funcionamiento consta en una tolva de almacenamiento, (volumen variable), salida unida a una
boca de entrada, a tubo con espiral incorporado “Sin fin” de longitud variable, según las necesidades.
El eje del “Sin fin” conectado con un motor eléctrico (potencia variable), llevando incorporado un
reductor de velocidad cambiable manualmente. El conjunto lleva incorporado un interruptor horario,
con pilas para marcar el tiempo exacto, y conectado a la red eléctrica. La conjunción de estos
elementos, resulta en la comida exacta, hora exacta que se desee y las veces necesarias; sin
intervención humana, previa programación y llenado de la tolva. Admite funcionamiento con baterías,
el sistema no varía.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 4
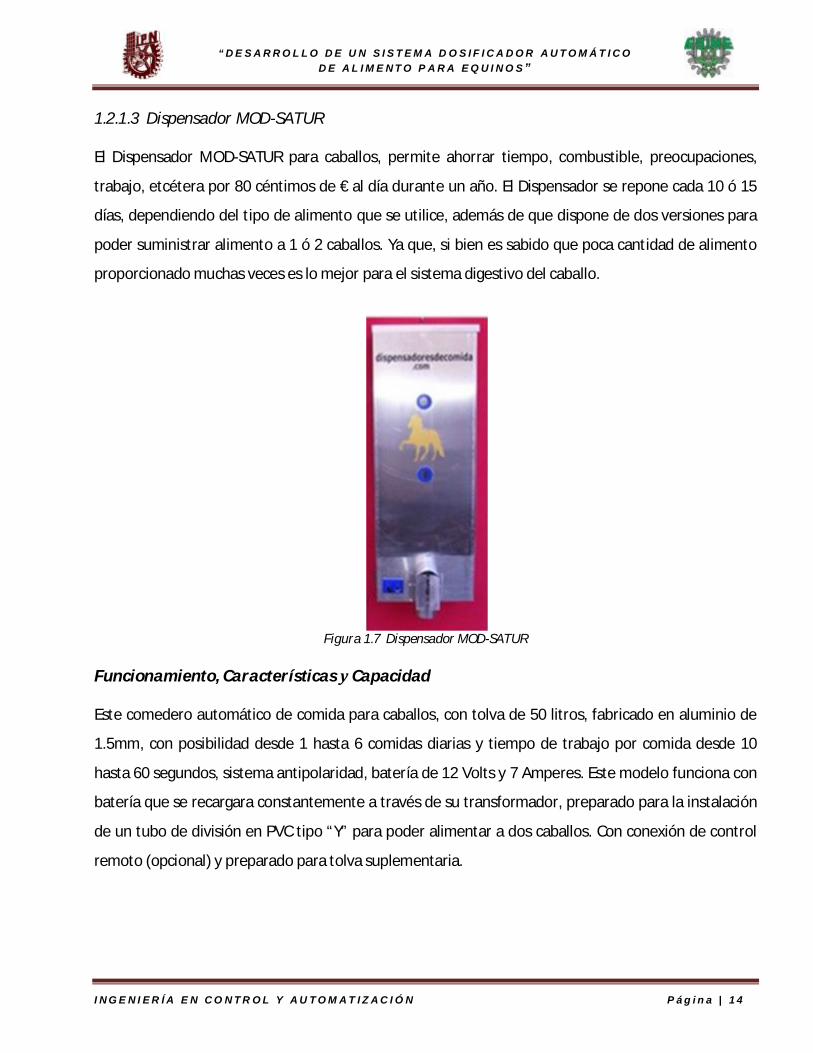
1.2.1.3DispensadorMOD-SATUR El Dispensador MOD-SATUR para caballos, permite ahorrar tiempo, combustible, preocupaciones,
trabajo, etcétera por 80 céntimos de € al día durante un año. El Dispensador se repone cada 10 ó 15
días, dependiendo del tipo de alimento que se utilice, además de que dispone de dos versiones para
poder suministrar alimento a 1 ó 2 caballos. Ya que, si bien es sabido que poca cantidad de alimento
proporcionado muchas veces es lo mejor para el sistema digestivo del caballo.
Figura1.7DispensadorMOD-SATUR
Funcionamiento,CaracterísticasyCapacidad Este comedero automático de comida para caballos, con tolva de 50 litros, fabricado en aluminio de
1.5mm, con posibilidad desde 1 hasta 6 comidas diarias y tiempo de trabajo por comida desde 10
hasta 60 segundos, sistema antipolaridad, batería de 12 Volts y 7 Amperes. Este modelo funciona con
batería que se recargara constantemente a través de su transformador, preparado para la instalación
de un tubo de división en PVC tipo “Y” para poder alimentar a dos caballos. Con conexión de control
remoto (opcional) y preparado para tolva suplementaria.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 6
1.2.1.4RoboHorseX(6-12-18caballos) Central robótica para 6, 12 ó 18 caballos, para el control de varias tolvas con una sola central, con
alimentador 220 – 12 V, para batería 12 V – 44 Amp, para 6 comidas diarias, indicador de carga y
voltímetro, fabricado en Acero Galvanizado.
Figura1.8RoboHorseX(6-12-18caballos)
Funcionamiento,CaracterísticasyCapacidad Ø Aprendizaje fácil y rápido de los animales.
Ø Facilita el trabajo y la distribución del tiempo, no hay que mezclar ni cargar con recipientes.
Ø Puede programarlo de diferentes formas y hacer un seguimiento adecuado de los datos de
alimentación de los equinos, con la seguridad de que cada uno consuma la cantidad que
necesita.
TipodeControl Su control se basa en una unidad central de la que dependen todas las demás tolvas con un circuito
eléctrico en el cual se programa un horario de dosificación al día y un temporizador el cual regula la
ración de alimento a suministrar para todas las tolvas conectadas. El RoboHorse X permite su
expansión para 6, 12 o 18 caballos bajo un mismo sistema de dosificación, ya que no permite alterar
las raciones u horarios para cada una de sus tolvas.


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 8
En función a estas características y al análisis realizado a los sistemas de dosificación existentes en el
mercado, se plantea para el diseño del dosificador, un sistema de dosificación por control de descarga
con tolva, con lo cual la tolva tendrá la capacidad de albergar los 75 kilogramos de alimento.
Para el sistema de control, se tiene contemplado gobernar las n-estaciones de servicio a partir de un
controlador lógico programable (PLC), se decidió aplicar este tipo de controlador ya que frente a un
micro controlador, este presenta la versatilidad de manejar señales estándar sin la necesidad de
adecuación de las mismas, además de las funciones que presenta y la posibilidad de adaptar una
pantalla de la misma serie para la implementación de una interfaz hombre máquina que centralice las
operaciones, con lo que se simplifica la tarea de implementación de la misma.
Para el control de descarga de la tolva se plantearon 5 posibles soluciones de las cuales solo una fue la
que más se adapta a las necesidades del sistema en relación a los costos de implementación de la
misma. A continuación se describe cada una de las posibles soluciones concluyendo con la
seleccionada.
1.2.2.1ControlconRetroalimentación(GalgaExtensiométrica) Este tipo de control emplea una galga extensiométrica la cual censa el peso de la dosis y envía una
señal analógica la cual entrar es el SP y la compara con el punto de ajuste y cuando la dosis llega al
valor deseado envía una señal al actuador para que este bloquee la salida.
Figura1.9ControlconRetroalimentaciónconGalgaExtensiométrica

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 1 9
Si bien es el método más exacto para aplicar, presenta el inconveniente de ser uno de los mas costos
al implementar el sistema de galgas lo cual lo vuelve en un método poco atractivo para su
implementación.
1.2.2.2ControlconDosisFijaPre-calculadaconN-veces Este método ocupa un sistema de dos actuadores separadores, los cuales tienen un volumen
especificado entre sus cuchillas y opera n-número de veces para proporcionar ese n-número de
volumen en dosis fijada por el usuario.
Figura1.10DosisFijaPre-calculada
Las desventajas que presenta este método, por una parte está el costo de la implementación de de
dos actuadores lo que reditúa en la elevación del costo por la implementación de un secuenciador,
por otra parte tenemos la poca exactitud debida a las dosis fijas, además del estrés psicológico
generado al animal producto del funcionamiento intermitente de los actuadores.
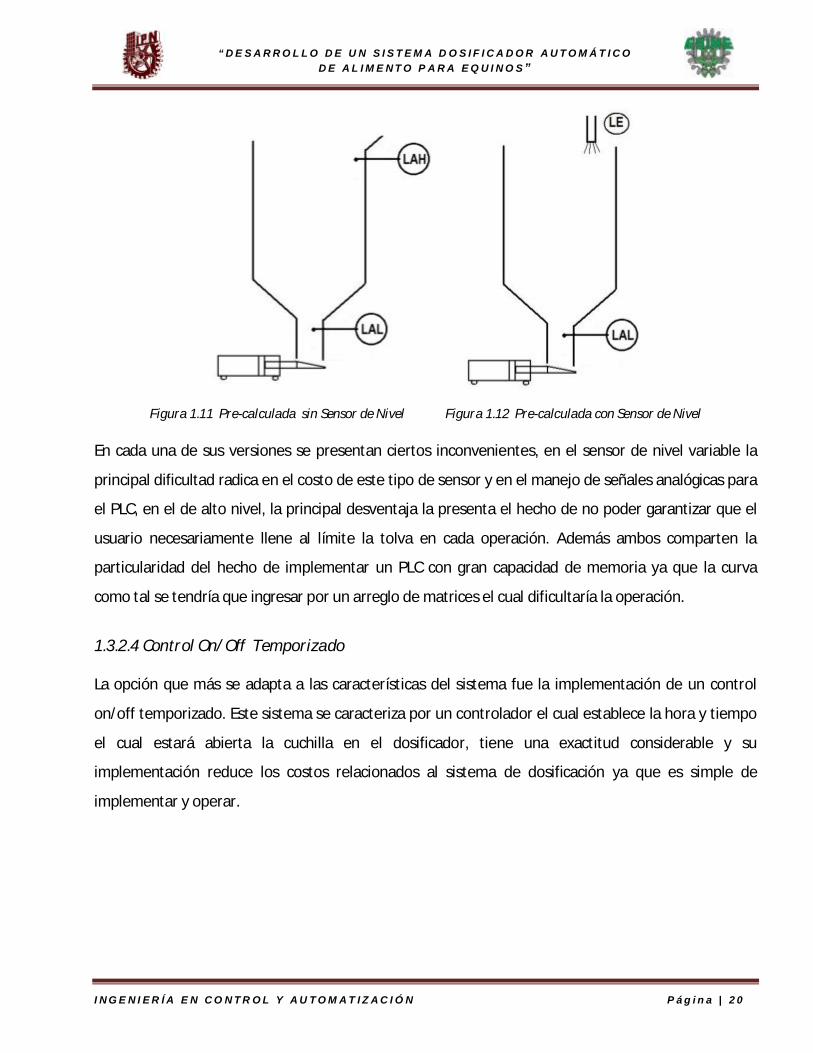
1.2.2.3ControlconCurvadeSeguimientoPre-calculada Este sistema tiene la particularidad de operar a partir de una curva pre calculada donde se grafica el
volumen de la tolva en función del tiempo, la cual se introduce al PLC y en base a posición en tiempo
o nivel según el tipo de control que se ocupe (ya sea por sensor de alto nivel o sensor de nivel
variable) se determina la dosis a suministrar.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 0
Figura1.11Pre-calculadasinSensordeNivelFigura1.12Pre-calculadaconSensordeNivel En cada una de sus versiones se presentan ciertos inconvenientes, en el sensor de nivel variable la
principal dificultad radica en el costo de este tipo de sensor y en el manejo de señales analógicas para
el PLC, en el de alto nivel, la principal desventaja la presenta el hecho de no poder garantizar que el
usuario necesariamente llene al límite la tolva en cada operación. Además ambos comparten la
particularidad del hecho de implementar un PLC con gran capacidad de memoria ya que la curva
como tal se tendría que ingresar por un arreglo de matrices el cual dificultaría la operación.
1.3.2.4ControlOn/OffTemporizado La opción que más se adapta a las características del sistema fue la implementación de un control
on/off temporizado. Este sistema se caracteriza por un controlador el cual establece la hora y tiempo
el cual estará abierta la cuchilla en el dosificador, tiene una exactitud considerable y su
implementación reduce los costos relacionados al sistema de dosificación ya que es simple de
implementar y operar.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 1
Figura1.13On/OffTemporizadoFigura1.14SensorInfrarrojo
Además de que está equipado con dos sensores infrarrojos lo que detectarán cuando la tolva esté a
punto de quedarse sin alimento, esto con el fin de que el usuario pueda saber en qué momento
rellenar la tolva, o en su caso poder adquirir el alimento para que no ocurra un desabasto del mismo,
el sensor de muy bajo nivel está con la finalidad de detectar si está pasando o no alimento, esto ayuda
al usuario para saber si el alimento se está dosificando normalmente y que no se encuentra atascado.
Su implementación se realizara con neumática ya que es una energía limpia y reduce los riesgos de
incendio en campo. Ambos sensores están conectados directamente a la entrada correspondiente en
el PLC, con el propósito de encender una alarma luminosa, en cuanto alguno de los dos sensores que
se muestran en la Figura 1.13 y 1.14, se activen.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 2
CAPÍTULO 2
Diseño del Sistema Dosificador Automático de Alimento
Proponer los criterios de selección de una tolva con su mecanismo dosificador, con capacidad de 75 kilogramos, con el propósito de obtener una autonomía de 2 semanas para la manutención de un equino promedio.
Desarrollar un sistema de control electro-neumático seguro y confiable, que reduzca los riesgos de choques eléctricos que puedan afectar la integridad física del animal, así como posibles riesgos de incendio en las caballerizas.



“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 5
En base a esta integración, el sistema de dosificación de alimento se diseño para funcionar de acuerdo
al el siguiente ciclo de operación:
Figura2.1EtapasdelProcesodeDosificación
Etapa de Suministro:
En esta etapa del proceso, el usuario procede a suministrar el alimento en la tolva. Además establece
la dosis a administrar a través de la interfaz hombre máquina. Es en esta etapa en la que se
establecen los tiempos que determinan la cantidad a dosificar y la hora en la que se debe entregar la
dosis al animal.
Etapa de Control:
La etapa de control es en la cual el controlador (PLC) a partir los datos introducidos por el usuario en
la interfaz (HMI) en la etapa de suministro, determina estos tiempos para enviar la señal de control al
solenoide de la válvula de control electroneumático. Por seguridad el sistema consta de un permisivo
de bajo nivel, este es activado cuando se agota el alimento dentro del dosificador o en ausencia de
este último en el mecanismo dosificador, por lo que el PLC envía una señal de alarma al usuario
indicándole que verifique la veracidad de la alarma.
Etapa Dosificación:
En la etapa de dosificación el PLC envía una señal eléctrica a cada uno de los respectivos solenoides
de las electroválvulas para que estas permitan la apertura del actuador neumático, permitiendo la
caída del alimento hasta que se cumpla con el tiempo introducido previamente por el usuario. Una
vez transcurrido el tiempo de apertura se interrumpe la señal de control con lo que debido a la



“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 2 8
Sección de Descarga:
- Área 5 x 6 cm
- Altura 7 cm
Excentricidad 0 “Cero”
Doblez de montaje de 44.5 mm (1” ¾) libre del área mayor por 25 mm de longitud de la pestaña.
Figura2.2PerspectivadelaTolvadelSistemadeDosificaciónPropuesto
En base a estas características se tiene que el volumen de la tolva es igual a:
- Deposito 90 litros
- Sección de convergencia y descarga 15 litros
Con lo que se obtiene capacidad de almacenamiento total de la tolva aproximadamente igual a 105
litros.
Dado que el peletizado que se maneja posee una densidad aproximadamente 0.709 Kg/litros, se tiene
que la capacidad aproximada en kilogramos para la tolva es igual a:
Capacidad de la Tolva = Volumen x Densidad
Capacidad de la Tolva = 105 litros x 0.709 Kg/litro = 74.45 Kg




“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 2
mediante la eliminación de impurezas, regulación del mismo y lubricación para protección de las
partes móviles del sistema.
El sistema de distribución se encarga de realizar la distribución de aire a los equipos de operación, en
nuestro caso se concreta un sistema de tipo abierto ya que permite la posibilidad de expansión de
nuevos equipos.
A su vez, cada sistema mínimo para cada comedero se encuentra conectado a esta red de
distribución. El sistema mínimo de operación de cada comedero se integra por un actuador de doble
efecto gobernado por una válvula de tipo solenoide el cual es activado por la señal de control emitida
por el PLC.
Figura2.3CircuitoNeumáticodelDosificadorAutomático


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 4
El otro tipo de fuente de alimentación para los compresores de aire, es la gasolina. Esta fuente de
alimentación se utiliza en zonas en las que es difícil encontrar a un suministro de electricidad, pero
este no es el caso.
Al elegir un compresor de aire, se considera que su fuente de energía sea la de más fácil acceso. En la
mayoría de los casos, la opción más común es la energía eléctrica.
En síntesis y con base en las consideraciones anteriores el compresor seleccionado es un compresor
de aire Milwaukee MIL2525, en la Tabla 2.1 se observa las características técnicas del equipo.
Tabla 2.1 Compresor de Aire Milwaukee MIL2525
Datos Técnicos
Motor Capacidad del Tanque
Velocidad de Funcionamiento Caudal del Aire Presión Máxima de
Trabajo
2.5 HP 25 litros 2.800 RPM 196 litros/minuto 8BAR – 116 PSI
Figura2.4CompresordeaireMilwaukeeMIL2525
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 5
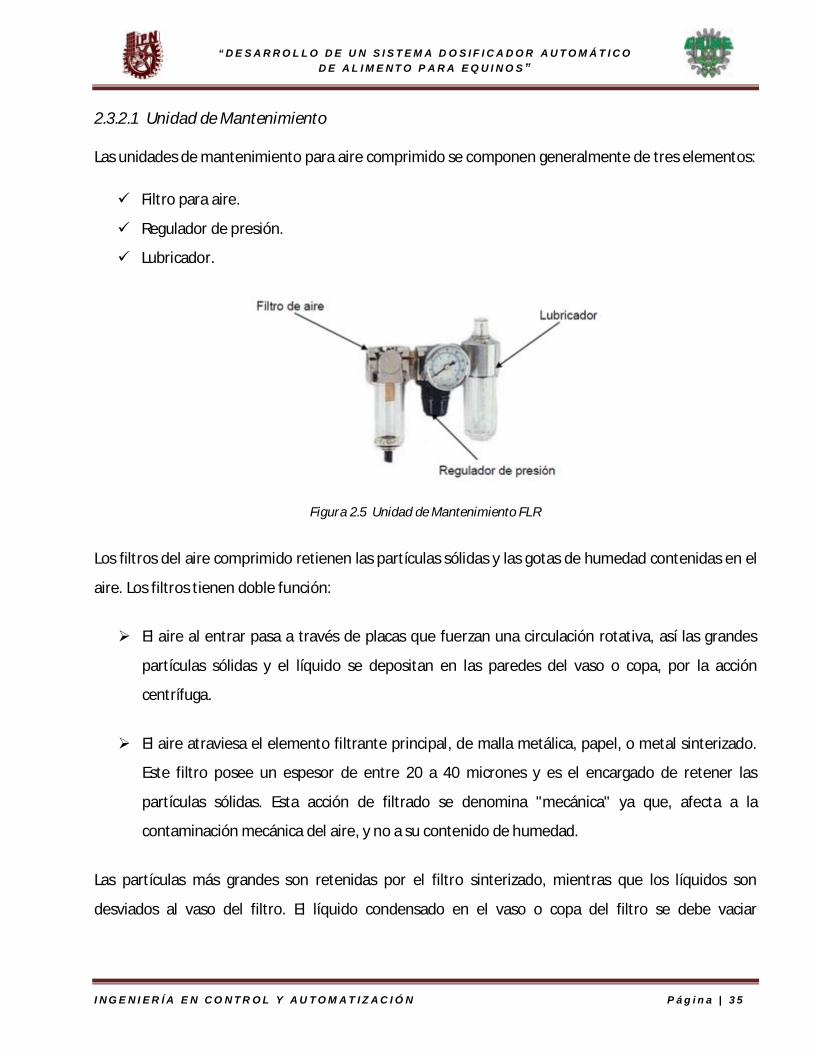
2.3.2.1UnidaddeMantenimiento Las unidades de mantenimiento para aire comprimido se componen generalmente de tres elementos:
ü Filtro para aire.
ü Regulador de presión.
ü Lubricador.
Figura2.5UnidaddeMantenimientoFLR
Los filtros del aire comprimido retienen las partículas sólidas y las gotas de humedad contenidas en el
aire. Los filtros tienen doble función:
Ø El aire al entrar pasa a través de placas que fuerzan una circulación rotativa, así las grandes
partículas sólidas y el líquido se depositan en las paredes del vaso o copa, por la acción
centrífuga.
Ø El aire atraviesa el elemento filtrante principal, de malla metálica, papel, o metal sinterizado.
Este filtro posee un espesor de entre 20 a 40 micrones y es el encargado de retener las
partículas sólidas. Esta acción de filtrado se denomina "mecánica" ya que, afecta a la
contaminación mecánica del aire, y no a su contenido de humedad.
Las partículas más grandes son retenidas por el filtro sinterizado, mientras que los líquidos son
desviados al vaso del filtro. El líquido condensado en el vaso o copa del filtro se debe vaciar

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 6
periódicamente, ya que de lo contrario podría ser arrastrado por la corriente del aire comprimido al
circuito.
Los filtros más finos, de hasta 0.01 micras, se encargan de filtrar las partículas más pequeñas e incluso
mínimas gotas de agua que pudieran quedar en el aire comprimido.
La Válvula Reguladora o Regulador de presión mantiene la presión de trabajo constante en el lado del
usuario, independientemente de las variaciones de presión en la red principal y del consumo. Se debe
tener presente que la presión de entrada del regulador debe ser siempre superior a la de trabajo.
El Lubricador del aire comprimido tiene la importante función de lubricar de modo suficiente a todos
los elementos neumáticos, en especial a los activos.
El aceite que se utiliza en la lubricación es aspirado de un pequeño depósito de la misma Unidad de
Mantenimiento, mezclado con la corriente del aire comprimido, y distribuido en forma de "niebla" o
micro pulverización.
Para que la tarea del filtro sea efectiva, el caudal debe de ser suficientemente fuerte. En instalaciones
especiales, de baja presión o con sensores específicos, deberá evitarse el uso de aire lubricado,
mediante el uso de suministros diferentes para la conexión de esos elementos.
Figura2.6UnidaddeMantenimientoFR


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 8
Tabla 2.2 Cilindro de Doble Efecto (PRA/182000)
Datos Técnicos
Fluido Funcionamiento Presión de trabajo Temperatura de trabajo
Aire comprimido filtrado con o sin
lubricación
PRA/182000 Amortiguación regulable
1 a 16 bar
-20°C + 80°C máx.
PRA/182000/M Embolo magnético,
amortiguación regulable
Consultar a nuestro Servicio Técnico para
temperaturas inferiores a +2°C
Materiales
Camisa Tapas Vástago (Martensitico)
Juntas del vástago
Juntas del embolo
Juntas toricas
aluminio anodizado aluminio inyectado acero inoxidable poliuretano poliuretano goma nitrilica
Figura2.7CilindrodeDobleEfectoPRA/182000
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 3 9
2.3.4ElectroválvulaNorgren Una electroválvula está diseñada para controlar el flujo de un fluido a través de un conducto como
puede ser una tubería. La válvula está controlada por una corriente eléctrica a través de una bobina
selenoidal.
Una electroválvula tiene dos partes fundamentales: el solenoide y la válvula. El solenoide convierte la
energía eléctrica en energía mecánica para que actúe la válvula.
Existen varios tipos de electroválvulas. En algunas electroválvulas el solenoide actúa directamente
sobre la válvula proporcionando toda la energía necesaria para su movimiento. Es común que la
válvula se mantenga cerrada por la acción de un muelle y que el solenoide la abra venciendo la fuerza
del muelle. Esto quiere decir que el solenoide debe estar activado y consumiendo energía mientras la
válvula deba estar abierta.
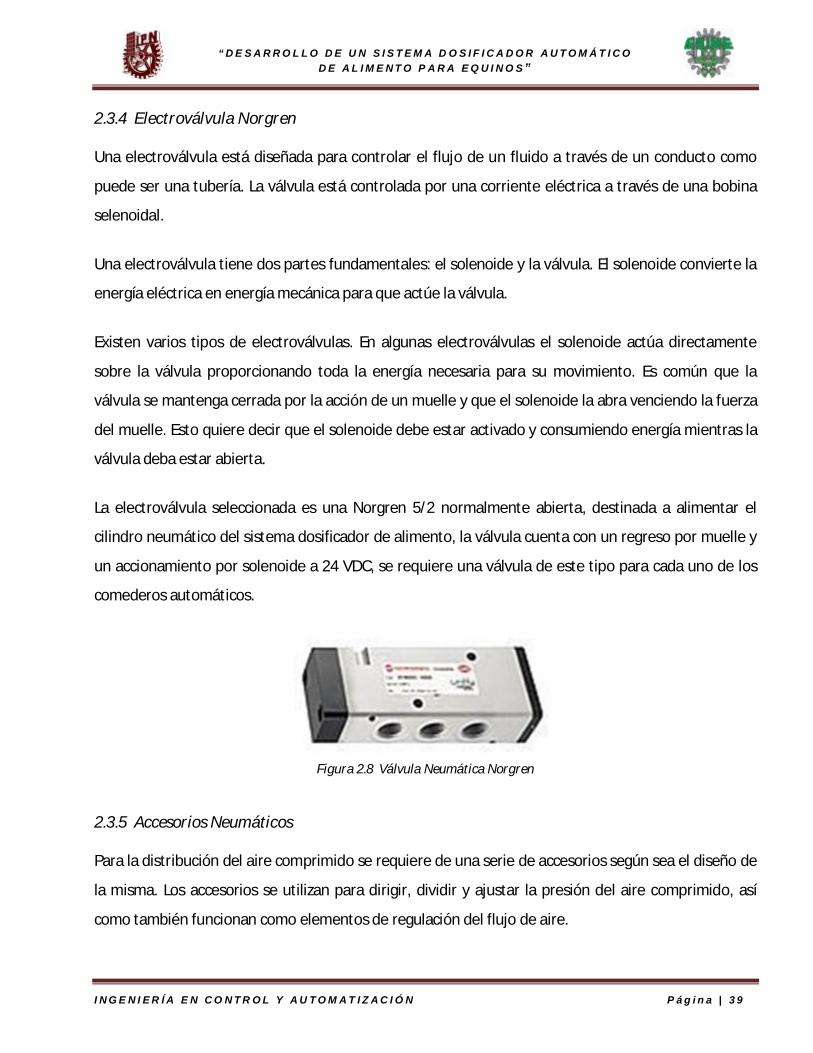
La electroválvula seleccionada es una Norgren 5/2 normalmente abierta, destinada a alimentar el
cilindro neumático del sistema dosificador de alimento, la válvula cuenta con un regreso por muelle y
un accionamiento por solenoide a 24 VDC, se requiere una válvula de este tipo para cada uno de los
comederos automáticos.
Figura2.8VálvulaNeumáticaNorgren
2.3.5AccesoriosNeumáticos Para la distribución del aire comprimido se requiere de una serie de accesorios según sea el diseño de
la misma. Los accesorios se utilizan para dirigir, dividir y ajustar la presión del aire comprimido, así
como también funcionan como elementos de regulación del flujo de aire.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 1
al operario. Gracias a la movilidad de las partículas en él contenidas, no hay riesgo de obturaciones
debidas a las impurezas o partículas de aceite presentes en el aire de escape, garantizando así la
estabilidad del caudal.
Figura2.9ComposiciónInternadelSilenciadorNeumático


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 3
Sus características son:
Ø Preconfigurados de programación 1K y memoria de datos: La facilidad de configuración de
ayuda (bit, entero, temporizadores, contadores, etcétera).
Ø Procesamiento rápido: Permite un tiempo de procesamiento típico de 1.5 ms para un
programa de instrucción 500.
Ø Incorporada en la memoria EEPROM: Retiene toda la lógica de escalera y los datos si el
controlador pierde el poder, eliminando la necesidad de la batería hacia arriba o por separado
del módulo de memoria de devolución.
Ø RS-232 de Canal de Comunicación: Permite una conectividad sencilla a un ordenador personal
para el programa de carga, descarga y la vigilancia a través de protocolos múltiples, incluyendo
DF1 Full Duplex.
Ø Esclavo RTU protocolo de apoyo: El uso DF1 Half-Duplex de esclavos, que permite hasta 254
notas para comunicarse con un solo maestro que utilizan módems de radio, líneas arrendadas
módems o enlaces ascendentes por satélite.
A continuación se muestra los diagramas de conexión del PLC Micro Logix 1000:
Figura2.10DiagramadeConexióndelPLCMicroLogix1000

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 4
Figura2.11DiagramadeConexión
2.4.2InterfazHumano-Máquina La interfaz de usuario o interfaz humano-máquina es el medio con que el usuario puede comunicarse
con una máquina, un equipo o una computadora, y comprende todos los puntos de contacto entre el
usuario y el equipo, normalmente suelen ser fáciles de entender y fáciles de accionar.
Las interfaces básicas de usuario son aquellas que incluyen elementos como menús, ventanas,
teclado, ratón, algunos sonidos que la computadora hace, y en general, todos aquellos canales por los
cuales se permite la comunicación entre el ser humano y la computadora. La mejor interacción
humano-máquina a través de una adecuada interfaz (Interfaz de Usuario), que le brinde tanto
comodidad, como eficiencia.
Dentro de las Interfaces de Usuario se puede distinguir básicamente tres tipos:
A) Una interfaz de hardware, a nivel de los dispositivos utilizados para ingresar, procesar y
entregar los datos: teclado, ratón y pantalla.
B) Una interfaz de software, destinada a entregar información acerca de los procesos y
herramientas de control, a través de lo que el usuario observa habitualmente en la pantalla.


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 6
Point-Access/Display Funtion. Permite supervisar o modificar ficheros de datos en SLC o en controles
de PLC. Use esta función para el sistema y ajustar los programas de aplicación
Figura2.12DisplaydelaInterfazdeUsuario Algunas de las características más sobresalientes del DTAM Micro son:
Ø Display.- La pantalla del Display utiliza 2 líneas por 20 caracteres que usan un alto contraste
de tecnología LCD.
Ø Teclado numérico (key pad).- El teclado numérico es separado por el color en grupos
fácilmente identificados o funciones. En la adición, cada llave tiene un domo levantado en el
centro para proporcionar la regeneración táctil. El teclado numérico es diseñado para las
operaciones manuales, la utilización de cualquier otro objeto o instrumento puede dañar
teclado.
Ø LED indicador.- El LED de encendido en la esquina superior izquierda de la pantalla indica la
operación del DTAM Micro. Este LED se ilumina después de que el DTAM Micro para las
prueba de diagnóstico.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 7
Figura2.13ConexióndelDTAMMicro

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 8
Figura2.14FuncióndelosBotonesdelDTAMMicro

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 4 9
2.4.4Comunicación Conexión entre la Computadora y el Micro Logix 1000 La comunicación entre nuestra computadora y el PLC Micro Logix 1000, se efectúa utilizando un cable
RS-232 (D9), con terminal en mini DIN de 8 pines con la siguiente configuración:
Figura2.15CabledeComunicaciónRS-232(D9)

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 0
Comunicación de la Pantalla DTAM Micro al Micro Logix 1000 Para comunicar la pantalla DTAM Micro con el PLC, Micro Logix 1000 se utiliza un cable de
comunicación RS-232 macho con un cable mini DIN de 8 pines para la entrada al PLC, con la siguiente
configuración.
Figura2.16ConfiguracióndelCabledeComunicaciónRS-232(D9)
Como recomendación el cable no debe de ser de más de 2 metros de largo para asegurar una buena
comunicación.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 1
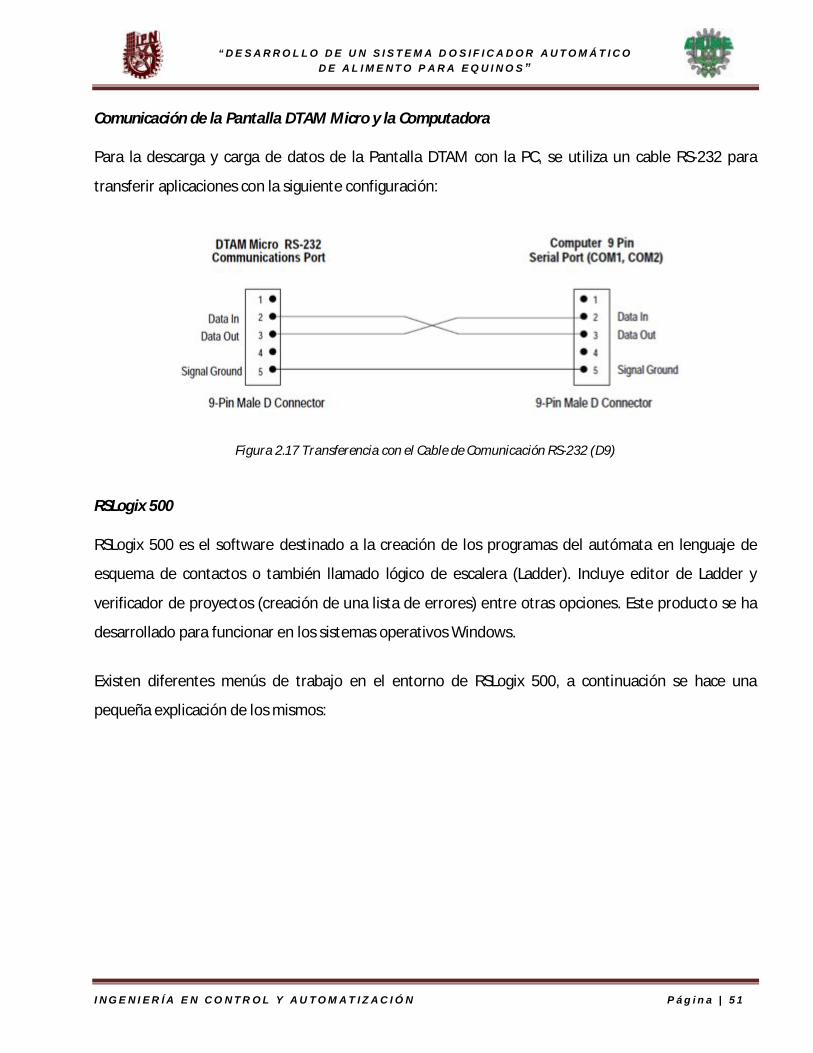
Comunicación de la Pantalla DTAM Micro y la Computadora Para la descarga y carga de datos de la Pantalla DTAM con la PC, se utiliza un cable RS-232 para
transferir aplicaciones con la siguiente configuración:
Figura2.17TransferenciaconelCabledeComunicaciónRS-232(D9)
RSLogix 500 RSLogix 500 es el software destinado a la creación de los programas del autómata en lenguaje de
esquema de contactos o también llamado lógico de escalera (Ladder). Incluye editor de Ladder y
verificador de proyectos (creación de una lista de errores) entre otras opciones. Este producto se ha
desarrollado para funcionar en los sistemas operativos Windows.
Existen diferentes menús de trabajo en el entorno de RSLogix 500, a continuación se hace una
pequeña explicación de los mismos:

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 2
Figura2.18AmbienteVisualdelRSLogix500 Ø Barra de Menú.- permite realizar diferentes funciones como recuperar o guardar programas,
opciones de ayuda, etc. Es decir, las funciones elementales de cualquier software actual.
Ø Barra de Iconos.- engloba las funciones de uso más repetido en el desarrollo de los programas.
Ø Barra de Estado del Procesador.- Nos permite visualizar y modificar el modo de trabajo del
procesador (online, offline, program y remote), cargar y/o descargar programas
(upload/download program), así como visualizar el controlador utilizado (Ethernet drive en el
caso actual).
Ø Barra de Instrucciones.- Esta barra le permitirá, a través de pestañas y botones, acceder de
forma rápida a las instrucciones más habituales del lenguaje Ladder. Presionando sobre cada
instrucción, ésta se introducirá en el programa Ladder.
Ø Ventana del Programa Ladder.- Contiene todos los programas y subrutinas Ladder
relacionados con el proyecto que se esté realizando. Se puede interaccionar sobre esta
ventana escribiendo el programa directamente desde el teclado o ayudándose con el ratón (ya


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 4
2.4.5DiagramadeConexiónEléctrico El Diagrama de Conexión Eléctrico abarca las conexiones eléctricas que se involucran en este
proyecto, los sistemas eléctricos son el PLC, la Pantalla DTAM Micro, el solenoide de la válvula
neumática, los sensores y botones del tablero de control.
Figura2.19DiagramadeConexiónEléctrico

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 5
CAPÍTULO 3
Algoritmo de Control
Programar el algoritmo de control para el controlador lógico programable que gobierne el circuito de control electro-neumático a partir de las especificaciones que el cliente requiera para cada equino.
Implementar una interfaz hombre máquina que facilite la interacción y operación del cliente con el sistema, para la selección de los tiempos y cantidades periódicas a suministrar por el sistema dosificador.


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 5 8
3.2.2DescripcióndelaProgramacióndelAlgoritmodeControl El Micro Logix 1000 fue programado bajo las siguientes instrucciones, están constan de 3 subrutinas y
el Main Program (programa principal).
En la Figura 3.1 se visualiza el programa principal y las 3 subrutinas, así como un pequeño resumen de
lo que realizan dichas subrutinas.
Figura3.1VisualizaciónGeneraldelAlgoritmodeControlenRSLogix


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 0
Figura3.2VisualizacióndelProgramaenRSLogix


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 2
Figura3.3VisualizacióndelaPrimeraSubrutinadelProgramaenRSLogix

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 3
3.2.2.3Alarma(LAD4) En la siguiente subrutina se manejan las alarmas de bajo nivel de alimento de cada tolva, es la
subrutina encargada de mandar la señal a los usuarios para rellenar las tolvas. En la Tabla 3.3 se
encuentran los comandos empleados y en la Figura 3.4 se observa la segunda subrutina en RSLogix.
Tabla 3.3 Comandos de la Segunda Subrutina
Tipo Descripción
Salidas
O:0/0 Encargada de activar la señal de alarma por bajo nivel.
Entradas
I:0/1 Entrada correspondiente a la señal de bajo nivel de alimento de la tolva 2. I:0/2 Entrada correspondiente a la señal de bajo nivel de alimento de la tolva 2. I:0/3 Entrada correspondiente a la señal de bajo nivel de alimento de la tolva 2. I:0/4 Entrada correspondiente a la señal de bajo nivel de alimento de la tolva 2. I:0/5 Entrada correspondiente a la señal de bajo nivel de alimento de la tolva 2.
Figura3.4VisualizacióndelaSegundaSubrutinadelProgramaenRSLogix


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 5
Figura3.5VisualizacióndelaTerceraSubrutinadelProgramaenRSLogix


“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 7
3.3.1DescripcióndelaProgramacióndelaDTAMMicro Para la programación de la Pantalla DTAM Micro se utilizó un software dado por los fabricantes, el
que trabaja en sistema MS-DOS, pudiendo programar 263 pantallas, existen tres tipos de pantallas, las
de sub-menús (Figura 3.6 y Figura 3.7), para visualizar datos y para ingresar datos.
Figura3.6PantalladelDTAMMicro La Figura 3.7 es una muestra de la pantalla que aparece en nuestro software para crear y modificar las
pantallas de nuestro programa.
Figura3.7AmbientedeProgramacióndelDTAMMicro
Figura3.7AmbientedeProgramacióndelDTAMMicro
Caracteres que aparecen en el Display en la Pantalla.

“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 6 8
Figura3.8DiagramadeConexióndelasPantallasdelDTAMMicro Las teclas de acceso directo (Figura), están direccionadas para visualizar el valor de cada horario
programado para el suministro del alimento.
Tabla 3.5 Funciones de las Teclas de Acceso Directo
Visualizar la hora en que está programada la primera ración.
Visualizar la hora en que está programada la segunda ración.
Visualizar la hora en que está programada la tercera ración.
Visualizar la hora en que está programada la cuarta ración.
Visualizar la hora en que está programada la quinta ración.









“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 7 8
CAPÍTULO 4
Cotizaciones
Proporcionar un panorama en términos de costos y beneficio que conlleva el desarrollo del dosificador automático de alimento, al igual que proporciona datos que decidirán qué tan favorable es llevarlo a su comercialización.





“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 8 5
13 × 8645.00 = 112385.00
Meses * Gastos de Alimentación Manual
Un beneficio que se reflejara de inmediato al cambiar el sistema de dosificación a automático será
una mejor calidad de vida para los animales y el propio cliente, disminuyendo las problemáticas que
presenta la actividad de la dosificación manual de alimento, como se muestra en la Tabla 4.9.
Tabla 4.9 Comparativa de Costos y Beneficios entre EQUS & EQUIMATIC
EQUS EQUIMATIC
10 x 10,251.00 = 102,510.00 10 x 10,308.72 = 103,308.00
· Capacidad de 60 kilogramos. · 10 Horarios distintos de raciones. · Unidad Central para manipular todas las tolvas instaladas. · Precisión en la dosificación del 96%. · Alarma por bajo nivel de alimento. · Previene choques eléctricos al trabajar neumáticamente.
· Capacidad de 40 kilogramos. · 3 Horarios distintos de raciones. · Cada tolva tiene que programable individualmente. · Precisión en la dosificación del 90%.








Foto Nº 1.- Interior de la Tolva.
La tolva es el depósito del sistema de dosificador de alimento, su función principal consiste en almacenar el alimento que se suministrara al equino. Está conformado por dos secciones, el depósito y la de convergencia y descarga.
Foto Nº 2.- Vista Lateral de la Tolva.
El depósito es la sección de mayor volumen, como su nombre lo indica, su función consiste en almacenar el alimento a dosificar. La sección de convergencia y descarga tiene como fin centrar las fuerzas producto de la reducción de aérea en la sección de descarga.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 9 7
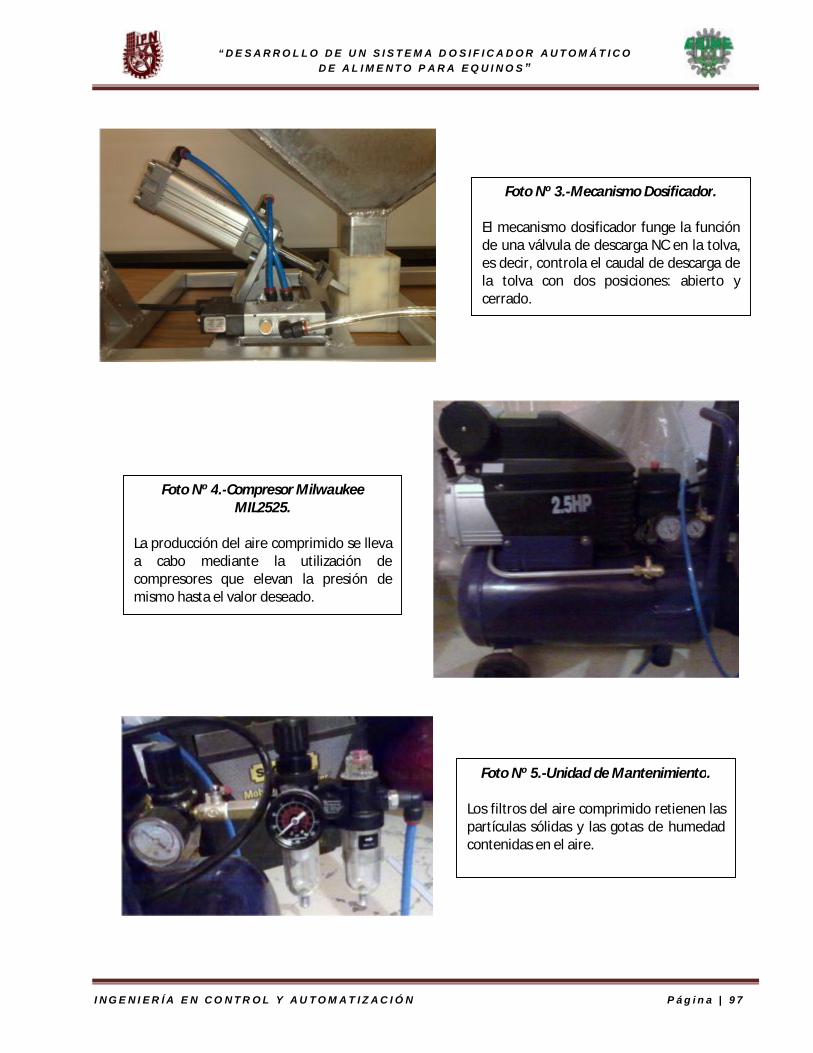
Foto Nº 3.-Mecanismo Dosificador.
El mecanismo dosificador funge la función de una válvula de descarga NC en la tolva, es decir, controla el caudal de descarga de la tolva con dos posiciones: abierto y cerrado.
Foto Nº 4.-Compresor Milwaukee MIL2525.
La producción del aire comprimido se lleva a cabo mediante la utilización de compresores que elevan la presión de mismo hasta el valor deseado.
Foto Nº 5.-Unidad de Mantenimiento.
Los filtros del aire comprimido retienen las partículas sólidas y las gotas de humedad contenidas en el aire.
“ D E S A R R O L L O D E U N S I S T E M A D O S I F I C A D O R A U T O M Á T I C O D E A L I M E N T O P A R A E Q U I N O S ”
I N G E N I E R Í A E N C O N T R O L Y A U T O M A T I Z A C I Ó N P á g i n a | 9 8
Foto Nº 6.-HMI DTAM Micro.
El DTAM Micro permite a operadores supervisar y manipular datos de un proceso en tiempo real. Con una gran capacidad de memoria para almacenaje, información de configuración y programa de usuario, las pantallas son mantenidas en la memoria permanente que proporciona el almacenaje para aproximadamente 244 pantallas.
Foto Nº 7.-HMI DTAM Micro.
El controlador programable MicroLogix 1000 ofrece alta velocidad, instrucciones de gran alcance y las comunicaciones flexibles para aplicaciones que exigen soluciones compactas y rentables.




![Dosificación Sistema a Distancia - UNAM€¦ · Dosificación Sistema a Distancia 4 DÍEZ, Olga, FERNÁNDEZ, Rocío, SEOANE, Antonio. REGLAS DE ESTILO Y NETIQUETTE [en línea] Grupo](https://static.fdocuments.mx/doc/165x107/603f94fd6cc44b267d49d050/dosificacin-sistema-a-distancia-dosificacin-sistema-a-distancia-4-dez-olga.jpg)













