Control de un alimentador de terneros con...
24
Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos Lic. Guillermo Evangelista Página 1 de 24 Control de un alimentador de terneros con LPC1769 Autor Lic. Guillermo Evangelista Director del trabajo Esp. Ing. Pablo Ridolfi Jurado propuesto para el trabajo Ing. Juan Manuel Cruz Esp. Ing. Eric Pernia Ing. Ramiro Alonso Este plan de trabajo ha sido realizado en el marco de la asignatura Gestión de Proyectos entre abril y mayo de 2016.
Transcript of Control de un alimentador de terneros con...

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 1 de 24
Control de un alimentador de
terneros con LPC1769 Autor
Lic. Guillermo Evangelista
Director del trabajo
Esp. Ing. Pablo Ridolfi
Jurado propuesto para el trabajo
Ing. Juan Manuel Cruz
Esp. Ing. Eric Pernia
Ing. Ramiro Alonso
Este plan de trabajo ha sido realizado en el marco de la asignatura Gestión de
Proyectos entre abril y mayo de 2016.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 2 de 24
Tabla de contenido
Registros de cambios
Acta de Constitución del Proyecto
Identificación y análisis de los interesados
1. Propósito del proyecto
2. Alcance del proyecto
3. Supuestos del proyecto
4. Requerimientos
5. Entregables principales del proyecto
6. Desglose del trabajo en tareas
7. Diagrama de Activity On Node
8. Diagrama de Gantt
9. Matriz de uso de recursos de materiales
10. Presupuesto detallado del proyecto
11. Matriz de asignación de responsabilidades
12. Gestión de riesgos
13. Gestión de la calidad
14. Comunicación del proyecto
14. Gestión de Compras
16. Seguimiento y control
17. Procesos de cierre

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 3 de 24
Registros de cambios
Revisión Cambios realizados Fecha
1.0 Creación del documento
Se agregaron los primero 6 puntos del documento
30/03/2016
1.1 Se cambió la temática del proyecto Se agregó nombre del director del trabajo. Se ajustaron los propósito, alcances y requerimientos Se ajustaron las tareas a los nuevos requerimientos, se
agregó la duración en horas de cada una. Se creó el diagrama Aon Se creó el diagrama Gantt Se agregaron las matrices de asignación de
responsabilidad y de uso de recursos materiales Se confecciono presupuesto
06/04/2016 al
12/04/2016
1.2 Se cambió el título del proyecto Se agregaron más requerimientos Se modificaron tiempos de tareas Se modificó diagrama Gantt Se modificó diagrama AON Se corrigió matriz de asignación de responsabilidades Se actualizo el valor de HS de trabajo en el
presupuesto detallado. Se agregó gestión de riesgos Se agregó comunicación del proyecto Se agregó gestión de compras Se agregó gestión de la calidad Se agregó seguimiento y control Se agregó proceso de cierre
14/04/2016 al
19/04/2016
1.3 Corrección de errores marcados Se agregó descripción de gestión de riesgos Se modificaron algunos requerimientos
20/04/2016 al
27/04/2016
1.4 Correcciones menores Se completó gestión de riesgos Se modificó punto 5
28/04/2016

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 4 de 24
Acta de Constitución del Proyecto
Buenos Aires, 30 de marzo de 2016
Por medio de la presente se acuerda con el Sr. Guillermo Evangelista que su Proyecto Final de la
Carrera de Especialización en Sistemas Embebidos se titulará “Control de un alimentador de terneros con
LPC 1769”, consistirá esencialmente en el desarrollo del código fuente para controlar y gestionar un sistema
de alimentación para terneros , y tendrá un presupuesto preliminar estimado de 640 hs de trabajo, con
fecha de inicio miércoles 30 de marzo de 2016 y fecha de presentación pública miércoles 14 de diciembre
de 2016.
Se adjunta a esta acta la planificación inicial.
Ariel Lutenberg Gustavo Zeitune
Director de la CESE-FIUBA ADOX S.A.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 5 de 24
Identificación y análisis de los interesados
Rol Nombre y Apellido Departamento Puesto
Auspiciante Javier Viqueira Dirección Presidente ADOX
Cliente ADOX Dirección
Responsable Evangelista Guillermo
Colaboradores Pablo Ridolfi Docente CESE
Orientadores
Gustavo Zeitune
Investigación y
Desarrollo
Gerente de
Desarrollo
Jorge Fiszman
Ing. de desarrollo
Usuario Final INTA Desarrollo Tecnológico
Auspiciante: Javier Viqueira persona muy interesada en el desarrollo de este proyecto y en la
participación de alumnos de la Especialización en Sistemas Embebidos.
Colaboradores: Gustavo Zeitune gerente de desarrollo, predisposición para asesorarnos en los
detalles del sistema.
Orientadores: Jorge Fiszman trabaja junto a Gustavo Zeitune en el departamento de investigación y
desarrollo, está al tanto del día a día del proyecto. Nos va a ayudar mucho para el desarrollo del
proyecto.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 6 de 24
1. Propósito del proyecto El propósito de este proyecto es obtener el título de Especialista en Sistemas Embebidos que otorga
la Universidad de Buenos Aires, y a lo largo del proyecto poder conocer los procesos de investigación
y desarrollo que se utilizan en las empresas privadas del sector.
Este proyecto también tiene como propósito desarrollar el firmware que se utiliza en el control de
alimentadores de terneros.
La justificación del proyecto radica en tener un dispositivo capaz de alimentar terneros de una
manera más eficiente y controlada. De esta manera, se puede reducir el tiempo de destete y el animal
crecerá más rápido para poderlo incorporar al sistema productivo de forma más temprana.
2. Alcance del proyecto El proyecto contempla:
El desarrollo del firmware para el alimentador de terneros.
Los distintos códigos fuentes para las funciones del artefacto.
El envío de datos a través de protocolo Ethernet.
El proyecto no contempla:
El desarrollo mecánico del alimentador.
El hardware de adquisición de datos.
La placa base utilizada para el desarrollo.
3. Supuestos del proyecto
Varios módulos ya fueron desarrollados por la empresa.
La estructura principal del alimentador ya está realizada.
La mayor parte del hardware y dispositivos de adquisición de datos ya están montados.
Ya se cuenta con varias bibliotecas y drivers desarrollados.
4. Requerimientos 1. Características del sistema
1.1. El sistema deberá tomar el peso (100Kg-- +/-10gr) de cada ternero que se alimente (1)
1.2. El sistema deberá identificar a cada ternero por medio de un lector RFID. (1)
1.3. El sistema deberá tomar leche de 5 a 15°C y entregarla a 37 - 40°C. Resolución +/-0.1°C
(1)

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 7 de 24
1.4. El sistema deberá controlar la bomba de alimentación a través de un presóstato ubicado
en la tetina de alimentación. (1)
1.5. El sistema deberá comunicarse a través de un puerto Ethernet e intercambiar los datos
de peso e identificación de terneros con el server. (1)
1.6. Un sistema de limpieza que el firmware debe controlar. (3)
1.7. El hardware que se utilizara es una plataforma desarrollada por la propia empresa. (1)
1.8. Un botón de aprendizaje (1)
1.9. Un Sensor para medir temperatura y realizar ajustes. (1)
1.10. Nivel de líquido en el tanque, sensor de línea vacía (1).
2. Firmware
2.1. Una vez identificado el ternero (por RFID) se consultara la dieta necesaria a un servidor
conectado a través de protocolo TCP/IP. (1)
2.2 Para la conexión Ethernet se utilizará Lwip. (1)
2.3 El dispositivo se implementara con RTOS (1)
3. Gestión de proyectos
3.1 Se deberá utilizar redmine para la gestión de proyectos. (2)
3.2 se utilizara Mercurial (Hg) como sistema de repositorios. (2)
3.3 Doxygen para generar documentación del proyecto (3)
5. Entregables principales del proyecto
Informe de avance
Memoria del trabajo
Presentación ante el jurado
Demostración en video del funcionamiento del equipo

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 8 de 24
6. Desglose del trabajo en tareas
1. Búsqueda de material bibliográfico (22 Hs)
1.1. Buscar hoja de datos de todos los componentes. (3Hs)
1.2. Analizar la documentación desarrollada por la empresa para el proyecto general. (8Hs)
1.3. Estudiar cómo funciona cada uno de los componentes. (10 Hs)
2. Diseño Firmware. (18 Hs)
2.1. Diagrama de módulos (6 Hs).
2.2. Diagrama de actividades o secuencias (los más importantes). (6 Hs)
2.3. Diagrama de interfaces entre módulos. (6 Hs)
3. Implementación de Firmware. (300 Hs)
3.1. Desarrollar código de función para controlar de temperatura de leche y nivel del
depósito. (60 Hs)
3.2. Desarrollar código de función para controlar presóstato y bomba de leche. (60 Hs)
3.3. Desarrollar código de función para obtener medición de peso desde la balanza. (60 Hs)
3.4. Implementar código de función para manejar lector RFID. (60 Hs)
3.5. Desarrollar código de función para medir temperatura y humedad ambiente. (60 Hs)
4. Testing. (200 Hs)
4.1. Test unitario de cada función de software. (50 Hs)
4.2. Test de tipo funcional por bloques de código y con implementación en forma parcial del
hardware. (50 Hs)
4.3. Ensayos de verificación (lectura de balanza, RFID, etc.). (50 Hs)
4.4. Ensayo final de validación. (50 Hs)

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 9 de 24
5. Presentación del trabajo. (100 Hs)
5.1. Redacción del informe de avance. (20 Hs)
5.2. Redacción de la memoria escrita. (60 Hs)
5.3. Preparación de la presentación pública del trabajo. (20 Hs)
Horas totales de proyecto: 640 Hs
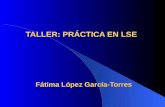
7. Diagrama de Activity On Node

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 10 de 24
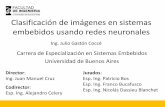
8. Diagrama de Gantt

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 11 de 24

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 12 de 24
9. Matriz de uso de recursos de materiales
Código WBS
Nombre de la tarea
Recursos requeridos (horas)
Notebook Placa ADOX Laboratorio
1.1
Buscar hoja de
datos de todos
los componentes
3
1.2
Analizar la
documentación
desarrollada por
la empresa para
el proyecto
general.
8
1.3
Estudiar cómo
funciona cada
uno de los
componentes
10
3.1
Desarrollar
código de
función para
controlar de
temperatura de
leche y nivel del
depósito.
45
15

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 13 de 24
3.2
Desarrollar código de función
para controlar presóstato y
bomba de leche.
60
3.3
Desarrollar código de función
para obtener medición de
peso desde la balanza.
60
3.4
Implementar código de
función para manejar lector
RFID
60
3.5 Desarrollar código de función
para medir temperatura y
humedad ambiente.
60
4.1 Test unitario de funciones. 47 3
4.2 Test de tipo funcional por
bloques de código y con
implementación en forma
parcial del hardware
47 3
4.3 Ensayos de verificación 47 3
4.4 Ensayo final de validación 47 3
5.1 Presentación del informe de
avance.
30
5.2 Presentación de la memoria
escrita
30

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 14 de 24
10. Presupuesto detallado del proyecto
Categoría Detalle Costo
Costo directo 600 Hs a $120/hs $72000
Costo Indirecto 30 % del costo directo $18000
Materiales Provistos por la empresa $0
Total $90000

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 15 de 24
11. Matriz de asignación de responsabilidades
Código WBS Título de la tarea
Listar todos los nombres y apellidos y el rol definidos en el proyecto
Lic. Guillermo Evangelista
Responsable del proyecto
Gustavo
Zeitune
Jorge Fiszman
Orientadores
Pablo Ridolfi
Director del Trabajo
ADOX
Clientes
1.1- 1.3
Búsqueda de
material
bibliográfico
P
C
C
2.1-2.3 Diseño de
Firmware
P C C,A
3.1
Desarrollar código
de función para
controlar de
temperatura de
leche y nivel del
depósito.
P
C
C, A
3.2
Desarrollar código
de función para
controlar
presóstato y bomba
de leche.
P
C
C, A
3.3
Desarrollar código
de función para
obtener medición
de peso desde la
balanza.
P
C
C, A

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 16 de 24
3.4
Implementar
código de función
para manejar lector
RFID
P
C
C, A
3.5
Desarrollar código
de función para
medir temperatura
y humedad
ambiente.
P
C
C, A
4.1
Test unitario de
funciones.
P
C
C, A
4.2
Test de tipo
funcional por
bloques de código y
con
implementación en
forma parcial del
hardware
P
C
C, A
4.3
Ensayos de
verificación
P
C
C, A
4.4
Ensayo final de
validación
P
C
C, A
5.1
Presentación del
informe de avance.
P
A
I
5.2
Presentación de la
memoria escrita
P
A
A
Referencias: P = Responsabilidad Primaria A = Aprobación I = Informado C = Consultado

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 17 de 24
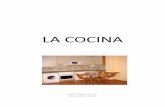
12. Gestión de riesgos
Ocurrencia (O): 1 (muy baja) a 10 (muy alta). Severidad (S): 1 (muy baja) a 10 (muy alta).
Detectabilidad (D): 1 (muy alta) a 10 (muy baja).
Criterio adoptado: - Se tomarán medidas de mitigación en los riesgos cuyos números de RPN sean mayores a 250 Nota: - El RPN se calcula como RPN=SxOxD - Los valores marcados con (*) en la tabla corresponden luego de haber aplicado la mitigación.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 18 de 24
1° Riesgo: Una o más tareas llevan más tiempo de lo previsto.
Severidad 10: el cronograma se vería afectado en forma negativa
Ocurrencia 5: este tipo de proyectos llevan más horas de las previstas.
Detectabilidad 5: se debe prestar especial atención y al detectar el mínimo atraso hay
que actuar de inmediato.
2° Riesgo: Extravío de la placa de desarrollo.
Severidad 8: el proyecto se paralizaría hasta conseguir una nueva placa.
Ocurrencia 6: la placa solo será utilizada por el desarrollador.
Detectabilidad 8: es difícil de detectar.
3° Riesgo: Surgen problemas al programar las diferentes funciones del firmware.
Severidad 9: se atrasaría la planificación del proyecto.
Ocurrencia 8: los proyectos de esta envergadura, pueden sufrir complicaciones en las
etapas de desarrollo.
Detectabilidad 5: se puede detectar siguiendo la planificación y comparándola con la
realidad.
4° Riesgo: No se llegan a cumplir todos los requisitos.
Severidad 8: pueden ocurrir atrasos que causen este tipo de riesgos.
Ocurrencia 7: al ser proyectos complejos, puede que no se cumplan todos los
requisitos.
Detectabilidad 6: es difícil de predecir en las primeras etapas del proyecto.
5° Riesgo: Se pierden archivos primordiales de la pc.
Severidad 10: por distintas razones se pueden perder archivos de la pc. Pueden
provocar atrasos en la planificación del proyecto.
Ocurrencia 7: nivel de ocurrencia media-alta. Fallos en la pc
Defectibilidad 9: es difícil predecir fallas en la PC, realizar copia de seguridad

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 19 de 24
Mitigación de riesgos que superan el RPN máximo establecido:
1° Riesgo: Una o más tareas llevan más tiempo de lo previsto.
Severidad 8: el cronograma se vería afectado en forma negativa
Ocurrencia 3: se agregaran más horas de trabajo si fuese necesario.
Detectabilidad 5: si se detectan mínimos retrasos actuar rápidamente consultando a
tutores y orientadores.
2° Riesgo: Extravío de la placa de desarrollo.
Severidad 8: una nueva placa podría conseguirse en un plazo no muy prolongado.
Ocurrencia 4: se tratará de no trasportarla si no es necesario.
Detectabilidad 6: se procurara guardarla en un lugar seguro.
3° Riesgo: Surgen problemas al programar las diferentes funciones del firmware.
Severidad 7: se atrasaría la planificación del proyecto, pero con consultas a
orientadores se podría reducir este atraso.
Ocurrencia 6: realizar las consultas necesarias a fin de llevar el proyecto en tiempo y
forma
Detectabilidad 5: se puede detectar siguiendo la planificación y comparándola con la
realidad. Si se terminan funciones rápido, dedicar el tiempo que sobra a las funciones
más complejas.
4° Riesgo: No se llegan a cumplir todos los requisitos.
Severidad 7: se tratara de mitigar los riesgos antes mencionados.
Ocurrencia 6: priorizar requisitos más importantes.
Detectabilidad 5: revisar la planificación, incluir más horas de trabajo.
5° Riesgo: Se pierden archivos primordiales de la pc.
Severidad 8: copias de seguridad frecuentes. Código alojado en repositorio
Ocurrencia 5: mantener sistema operativo de las pc.
Defectibilidad 7: es difícil de detectar, pero el riesgo se reduce al tener copias de los
archivos.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 20 de 24
13. Gestión de la calidad
Requerimientos 1.1 a 1.7: Características del sistema
Verificación y validación:
1. Responsable de la verificación: Evangelista Guillermo
La verificación consta de realizar pruebas de debugging con los sensores del sistema.
2. Responsable de la validación: Evangelista Guillermo
La validación se realizará excitando a los sensores con valores de referencia y contrastándolo con valores de control. Por ejemplo para la prueba de la báscula, se utilizarán pesas de acero y se observará Que el valor medido por el sistema sea igual al del peso colocado. Tomar leche a una temperatura de entre 5 y 15°C y llevarla hasta valores de 37°C-40°C y compararla con un termómetro calibrado. Simular una dieta (enviando los parámetros al microcontrolador de forma manual), activar la bomba para comprobar su correcto funcionamiento y dosificación. Comprobar que al presionar el botón de aprendizaje se ponga en funcionamiento la bomba de leche. A través del firmware, medir temperatura y humedad ambiente. Compararla con medidores calibrados.
Requerimientos 2.1 a 2.3: Firmware
Verificación y validación:
1. Responsable de la verificación: Evangelista Guillermo La verificación consta de realizar pruebas de debugging a las diferentes funciones del sistema. 2. Responsable de la validación: Evangelista Guillermo La validación se realizará leyendo el sensor RFID y comprobando que los datos leídos sean los mismos que los de la tarjeta a leer. Se enviaran datos de peso (Kg) e identificación de terneros a través de Ethernet para comprobar el correcto funcionamiento de Lwip. Testeos de los bloques de funciones e implementación parcial del hardware para comprobar el correcto desempeño de los mismos.

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 21 de 24
14. Comunicación del proyecto El plan de comunicación del proyecto es el siguiente:
PLAN DE COMUNICACIÓN DEL PROYECTO
¿Qué comunicar?
Audiencia Propósito Frecuencia Método de comunicación
Responsable
Definir objetivos, alcances y
restricciones
Director y orientadores
Evaluar como comenzar el
proyecto. Acciones
principales
Al inicio del proyecto
Reunión y correo
electrónico
Lic. Guillermo
Evangelista
Definir requerimientos
Orientadores Definir requerimientos
de forma precisa
Al inicio del proyecto y cuando sea necesario
Reunión y correo
electrónico
Lic. Guillermo
Evangelista
Informe de avance
Orientadores, director, jurado
Evidenciar evolución del
proyecto
Una vez a la mitad del proyecto
Correo electrónico Web CESE
Lic. Guillermo
Evangelista
Resolución de conflictos
Orientadores, director,
docentes CESE
Despejar dudas que surjan durante la
realización del proyecto
Cuando sea requerido
Reunión y correo
electrónico
Lic. Guillermo
Evangelista
Finalización y cierre
Director, clientes, jurados,
orientadores.
mostrar documentación
a los clientes
Al finalizar el proyecto
Correo electrónico
Lic. Guillermo
Evangelista

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 22 de 24
15. Gestión de Compras No se prevee contratar servicios. Los materiales utilizados (placa de desarrollo) para la realización
del proyecto serán provistos por ADOX S.A., por lo cual no es necesario un análisis de gestión de
compra.
16. Seguimiento y control
SEGUIMIENTO DE AVANCE
Tarea del WBS
Indicador de avance
Frecuencia de reporte
Responsable de seguimiento
Persona a ser informada
Método de comunicación
1.1
Finalización de búsqueda de
datos
Al finalizar la tarea
Lic. Guillermo Evangelista
------- Correo electrónico
1.2
-------
Al finalizar la
tarea
Lic. Guillermo Evangelista
------- Correo
electrónico
1.3
-------
Al finalizar la
tarea
Lic. Guillermo
Evangelista
------- Correo
electrónico
2.1 Diagramas terminados
Al finalizar la
tarea
Lic. Guillermo
Evangelista
------- Correo
electrónico
2.2
Diagramas terminados
Al finalizar la
tarea
Lic. Guillermo
Evangelista
------- Correo
electrónico
2.3 Diagramas terminados
Al finalizar la
tarea
Lic. Guillermo
Evangelista
------- Correo
electrónico

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 23 de 24
Tarea del WBS
Indicador de avance
Frecuencia de reporte
Responsable de seguimiento
Persona a ser informada
Método de comunicación
3.1
Leer en forma correcta
temperatura y nivel de liquido
Una vez por
semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
3.2 Leer presión en forma correcta y encender la
bomba
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
3.3
Leer puerto RS232 de la
balanza
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
3.4 Probar el código para
lectura de RFID
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
3.5 Leer en forma correcta
temperatura y humedad
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
4.1 Test unitario de
funciones.
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
4.2 Test de tipo
funcional por
bloques de
código y con
implementación
en forma
parcial del
hardware
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
4.3 Ensayos de
verificación
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico

Plan de Proyecto del Trabajo Final de Carrera de Especialización de Sistemas Embebidos
Lic. Guillermo Evangelista
Página 24 de 24
Tarea del WBS
Indicador de avance
Frecuencia de reporte
Responsable de seguimiento
Persona a ser informada
Método de comunicación
4.4 Ensayo final
de validación
Una vez por semana
Lic. Guillermo
Evangelista
Orientadores
Director
Correo
electrónico
5.1 Presentación del informe
A mitad del proyecto
Lic. Guillermo
Evangelista
Dr. Ing. Ariel Lutenberg
Correo
electrónico
5.2 Presentación de la memoria
del trabajo
Al finalizar el proyecto
Lic. Guillermo
Evangelista
Dr. Ing. Ariel Lutenberg Esp. Ing.
Pablo Ridolfi
Correo
electrónico
5.3 Defensa del trabajo ante el
jurado
Al finalizar el proyecto
Lic. Guillermo
Evangelista
Jurados, Director
Presentación
publica
17. Procesos de cierre A partir del listado WBS se evaluará como se llevó a cabo el proyecto, y en qué grado se cumplieron
los objetivos propuestos al inicio del mismo. Si hubieran quedado objetivos total o parcialmente
incompletos, se deberá hacer una evaluación de las causas y factores causantes y proponer acciones
futuras para asegurar el éxito de futuros proyectos.
Se archivará toda la documentación de la gestión del proyecto de forma de ser fácilmente reutilizada
en la planificación de futuros proyectos.
Luego de defendido el proyecto ante el jurado, se procederá a agradecer a todos los miembros del
equipo, director del trabajo, miembros del jurado y autoridades del CESE.