
Comunicacion PLC
71
UNIVERSIDAD NACIONAL DE SAN AGUSTÍN FACULTAD DE INGENIERÍA DE PRODUCCIÓN Y SERVICIOS ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA CURSO: COMUNICACIÓN Y SUPERVISION DE PLC’S TEMA: CONTROL DE MOTOR TRIFASICO ASINCRONO CON UN VARIADOR DE VELOCIDAD MEDIANTE UNA RED MODBUS CON UNA INTERFASE ESCADA INTEGRANTES: GALINDO CONDORI, JULVER 20103870 COAGUILA QUISPE MIGUEL 20090978 PROFESOR: ING. MANUEL JORDAN PALMA AREQUIPA-PERÚ
-
Upload
julver-galindo-condori -
Category
Documents
-
view
48 -
download
11
description
Comunicacion de plc premium y micro obsoletos.
Transcript of Comunicacion PLC
UNIVERSIDAD NACIONAL DE SAN AGUSTÍN
FACULTAD DE INGENIERÍA DE PRODUCCIÓN Y SERVICIOS
ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA
CURSO: COMUNICACIÓN Y SUPERVISION DE PLC’S
TEMA:
CONTROL DE MOTOR TRIFASICO ASINCRONO CON UN VARIADOR DE VELOCIDAD MEDIANTE UNA RED MODBUS CON UNA INTERFASE ESCADA
INTEGRANTES:
GALINDO CONDORI, JULVER 20103870 COAGUILA QUISPE MIGUEL 20090978
PROFESOR:
ING. MANUEL JORDAN PALMA
AREQUIPA-PERÚ
2015
2
Contenido1. INTRODUCCION....................................................................................................................6
2. MARCO TEORICO..................................................................................................................6
2.1. REDES DE COMUNICACIÓN..........................................................................................6
2.1.1. MODBUS...............................................................................................................6
2.1.2. UNI-TELWAY.........................................................................................................7
2.2. HARDWARE..................................................................................................................9
2.2.1. PLC PREMIUM.......................................................................................................9
2.2.2. PLC MICRO..........................................................................................................14
2.2.3. ALTIVAR31..........................................................................................................16
2.3. SOFTWARE..................................................................................................................19
2.3.1. PL7 PRO/JUNIOR.................................................................................................19
2.3.2. P-CIM..................................................................................................................20
3. DISEÑO DEL PROGRAMA Y CONFIGURACIÓN.....................................................................21
3.1. DIAGRAMA DE BLOQUES............................................................................................21
3.2. CONFIGURACION PLC PREMIUM................................................................................21
3.3. CONFIGURACION PLC MICRO.....................................................................................28
3.4. PROGRAMA LADDER PREMIUM.................................................................................31
3.5. PROGRAMA LADDER MICRO......................................................................................34
3.6. CONFIGURACION DE LA INTERFASE EN P-CIM............................................................38
3.7. Creacion de la interfase SCADA..................................................................................45
a) Botones......................................................................................................................46
b) Control Analogico.......................................................................................................48
c) Botón de Parada de Emergencia................................................................................50
d) Indicadores on/off......................................................................................................50
e) Indicador de Velocidad de Motor...............................................................................52
f) Indicador de Motor....................................................................................................53
g) Indicador de grafica....................................................................................................54
h) Indicadores de texto...................................................................................................54
3.8. CONFIGURACION ATV31.............................................................................................56
3.8.1. CONFIGURACION A FABRICA..............................................................................56
3.8.2. CONFIGURACION A DOS HILOS...........................................................................56
3
3.8.3. CONFIGURACION DE RELE DE FALLO..................................................................57
3.8.4. CONFIGURACION DE LA SALIDA ANALOGICA......................................................57
3.9. MOTOR TRIFASICO.....................................................................................................58
4. IMPLEMENTACION.............................................................................................................59
5. CONCLUSIONES..................................................................................................................60
6. BIBLIOGRAFIA.....................................................................................................................61
4
INDICE DE FIGURASFigura 1 Red Modbus...................................................................................................................6Figura 2 Curva BCT vs Tiempo......................................................................................................7Figura 3 Tabla de tiempos BCT.....................................................................................................7Figura 4 Modulo SCA 50...............................................................................................................8Figura 5 Módulo P ACC 01............................................................................................................8Figura 6 Modulo PLC Premium.....................................................................................................9Figura 7 Tabla de los racks PLC Premium.....................................................................................9Figura 8 Modulo de alimentacion PSY 5500...............................................................................10Figura 9 Modulo PS7 203...........................................................................................................10Figura 10 Modulo DEY 16D2.......................................................................................................11Figura 11 Modulo DSY 16R5.......................................................................................................11Figura 12 Modulo AEY 414.........................................................................................................12Figura 13 Modulo ASY 800.........................................................................................................12Figura 14 Modulo SCY 21601.....................................................................................................13Figura 15 Modulo ETY 110WS....................................................................................................13Figura 16 Modulo TSX 3721........................................................................................................14Figura 17 Módulos del PLC micro...............................................................................................14Figura 18 Modulo DMZ 28DR.....................................................................................................15Figura 19 MOdulo AEZ 414.........................................................................................................15Figura 20 Modulo ASZ 200.........................................................................................................16Figura 21 Modulo ATV31............................................................................................................16Figura 22 Diagrama de conexiones ATV31.................................................................................17Figura 23 Módulo educativo del laboratorio de control.............................................................18Figura 24 Imagen PL7.................................................................................................................19Figura 25 interfase PL7...............................................................................................................19Figura 26 imagen P-CIM.............................................................................................................20Figura 27 Imagen nuevo software PULSE...................................................................................20Figura 28 Diagrama de bloques..................................................................................................21Figura 29 Creando nuevo proyecto............................................................................................21Figura 30 Selección del PLC Premium.........................................................................................21Figura 31 Navegador de aplicacion............................................................................................22Figura 32 Configuracion de Hardware........................................................................................22Figura 33 Configuracion de racks...............................................................................................22Figura 34 seleccion del primer rack............................................................................................23Figura 35 Seleccion de la fuente de poder.................................................................................23Figura 36 seleccion de fuente de poder para PLC......................................................................23Figura 37 Fuente y PLC...............................................................................................................23Figura 38 Selección de entradas digitales...................................................................................24Figura 39 Entradas digitales.......................................................................................................24Figura 40 Seleccion de salidas de relé digitales..........................................................................24Figura 41 Salidas digitales..........................................................................................................25Figura 42 Seleccion de entradas analogicas...............................................................................25
5
Figura 43 Entradas analogicas....................................................................................................25Figura 44 Seleccion de salidas analogicas...................................................................................25Figura 45 Salidas analogicas.......................................................................................................26Figura 46 Seleccion del modulo de comunicacion PCMCIA........................................................26Figura 47 Módulo de comunicacion PCMCIA.............................................................................26Figura 48 Seleccion del modulo de acoplamiento Ethernet.......................................................26Figura 49 Modulo de acoplamiento Ethernet............................................................................27Figura 50 Configuracion de la via de comunicacion...................................................................27Figura 51 Seleccion del PLC micro..............................................................................................28Figura 52 PLC micro....................................................................................................................28Figura 53 Seleccion de entradas y salidas digitaless...................................................................29Figura 54 Seleccion de entradas analogicas y salidas analogicas...............................................29Figura 55 Cambio del tipo de salida analógica...........................................................................29Figura 56 Seleccion de la via de comunicacion...........................................................................30Figura 57 Seleccion P-CIM Setup................................................................................................38Figura 58 Seleccion Project Setup..............................................................................................38Figura 59 Creacion de nuevo proyecto.......................................................................................39Figura 60 Seleccion de instalacion de Driver P.CIM....................................................................39Figura 61 Instalacion de Driver P-CIM........................................................................................40Figura 62 Seleccion de comunicacion P-CIM..............................................................................40Figura 63 Nueva comunicacion..................................................................................................41Figura 64 Propiedades de puerto de comunicacion...................................................................41Figura 65 Nuevo canal de comunicacion....................................................................................42Figura 66 Seleccion de propiedades de canala de comunicacion...............................................42Figura 67 Configuracion de driver de comunicacion..................................................................43Figura 68 Configuracion de parámetro de PLC...........................................................................43Figura 69 Datos de PLC por defecto...........................................................................................44Figura 70 Driver de comunicacion ya configurado.....................................................................44Figura 71 Ubicacion de Animation Editor...................................................................................45Figura 72 Interfase Implementada.............................................................................................45
6
1. INTRODUCCIONEl objetivo del presente proyecto de semestre es realizar la comunicación entre una PC y un PLC, además de realizar la comunicación entre PLC y PLC. Se utilizará elementos del laboratorio de Control e Instrumentación, entre los cuales tenemos: PLC Premium, PLC micro, Altivar 28 o 31, y cables de comunicación correspondientes, todos estos elementos son fabricados por Schneider Electric, además se utilizara el software P-CIM del fabricante AFCON para la implementación de un interface SCADA.
Haremos un breve repaso del hardware correspondiente y luego hablaremos de las redes a usar, además de una breve descripción del proceso a implementar y su funcionamiento.
2. MARCO TEORICO2.1. REDES DE COMUNICACIÓN2.1.1.MODBUS
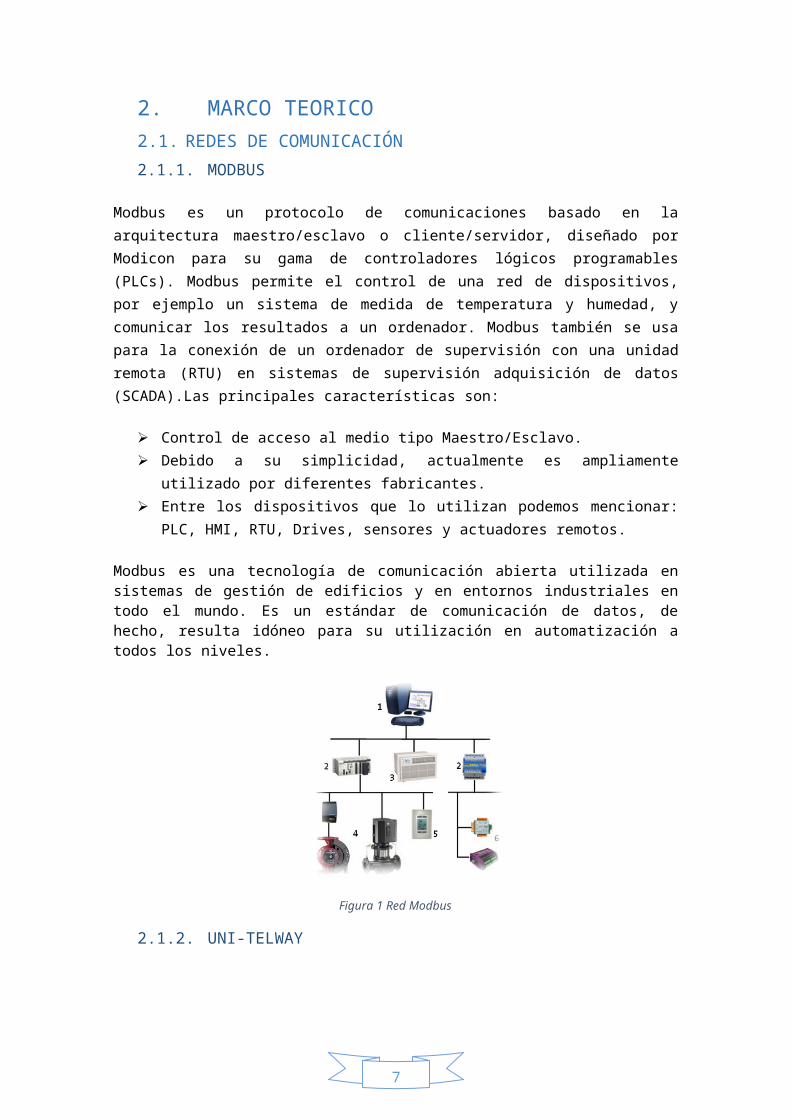
Modbus es un protocolo de comunicaciones basado en la arquitectura maestro/esclavo o cliente/servidor, diseñado por Modicon para su gama de controladores lógicos programables (PLCs). Modbus permite el control de una red de dispositivos, por ejemplo un sistema de medida de temperatura y humedad, y comunicar los resultados a un ordenador. Modbus también se usa para la conexión de un ordenador de supervisión con una unidad remota (RTU) en sistemas de supervisión adquisición de datos (SCADA).Las principales características son:
Control de acceso al medio tipo Maestro/Esclavo. Debido a su simplicidad, actualmente es ampliamente utilizado por diferentes
fabricantes. Entre los dispositivos que lo utilizan podemos mencionar: PLC, HMI, RTU, Drives,
sensores y actuadores remotos.
Modbus es una tecnología de comunicación abierta utilizada en sistemas de gestión de edificios y en entornos industriales en todo el mundo. Es un estándar de comunicación de datos, de hecho, resulta idóneo para su utilización en automatización a todos los niveles.
7
Figura 1 Red Modbus
2.1.2.UNI-TELWAY
El bus UNI-Telway es un estándar de comunicación entre componentes de sistemas de control (PLCs, terminales MMI, supervisores, controladores de velocidad variable, controladores numéricos, equipo de maquinaria, etc). Es ajustable para arquitecturas diseñadas para manejo de control y monitoreo de dispositivos via PLC o arquitecturas usadas por MMI.
El bus UNI-Telway requiere una estación maestra que manejara la conexión de los accesos al bus de varios estaciones conectadas (conocidas como estaciones esclavo).
a) Características El ciclo de tiempo de bus depende de: El número de dispositivos conectados. Tasa de datos. El tiempo de vuelta de cada dispositivo. El número, tamaño y tipo de mensaje. BCT=Bus Cycle Time, es el intervalo entre dos poleos del mismo dispositivo.
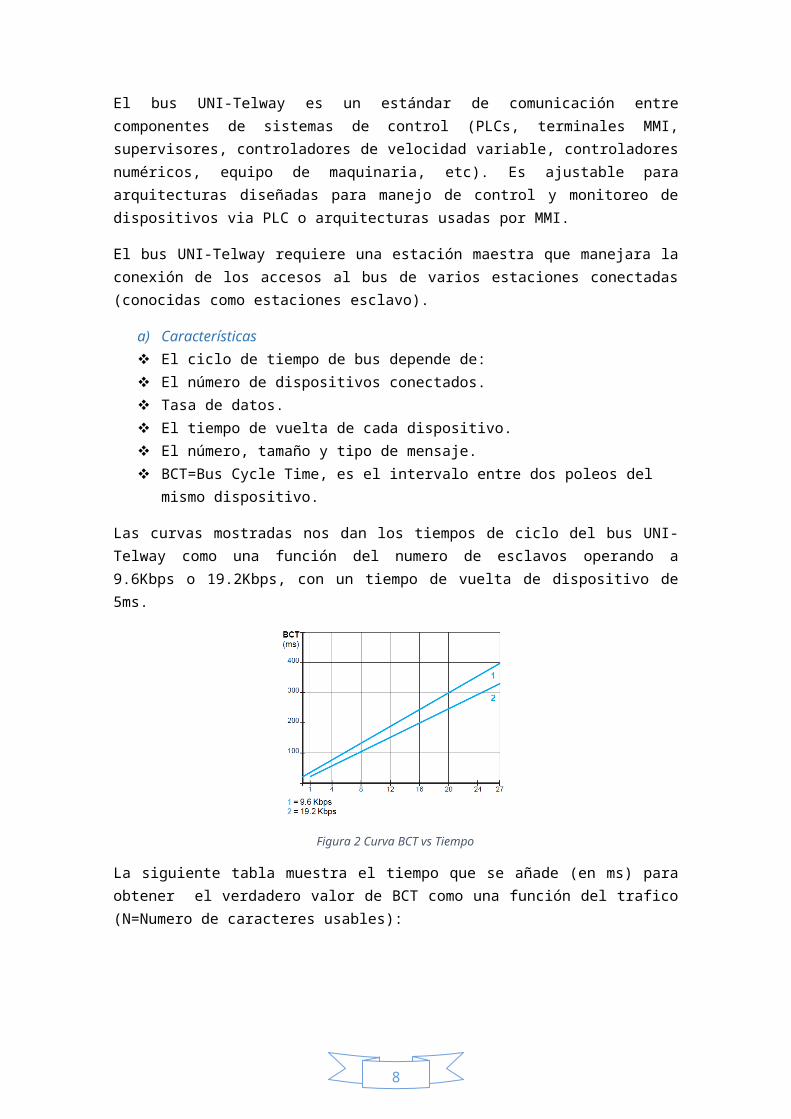
Las curvas mostradas nos dan los tiempos de ciclo del bus UNI-Telway como una función del numero de esclavos operando a 9.6Kbps o 19.2Kbps, con un tiempo de vuelta de dispositivo de 5ms.
Figura 2 Curva BCT vs Tiempo
8
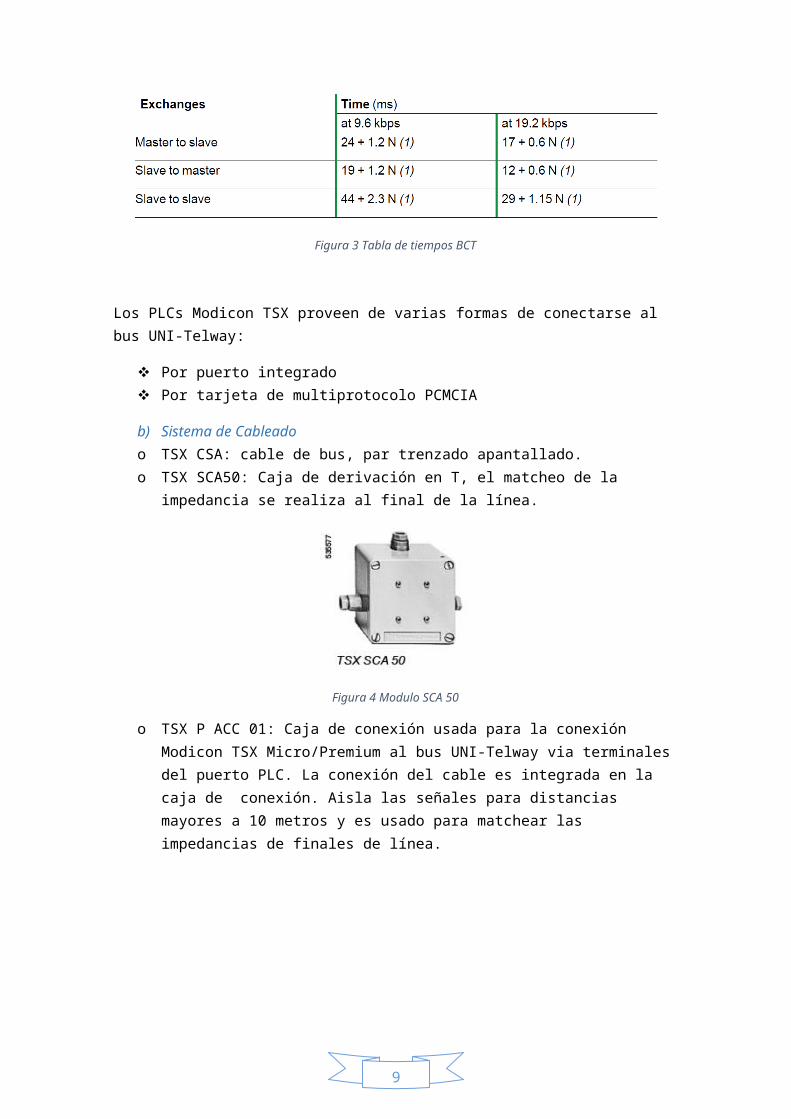
La siguiente tabla muestra el tiempo que se añade (en ms) para obtener el verdadero valor de BCT como una función del trafico (N=Numero de caracteres usables):
Figura 3 Tabla de tiempos BCT
Los PLCs Modicon TSX proveen de varias formas de conectarse al bus UNI-Telway:
Por puerto integrado Por tarjeta de multiprotocolo PCMCIA
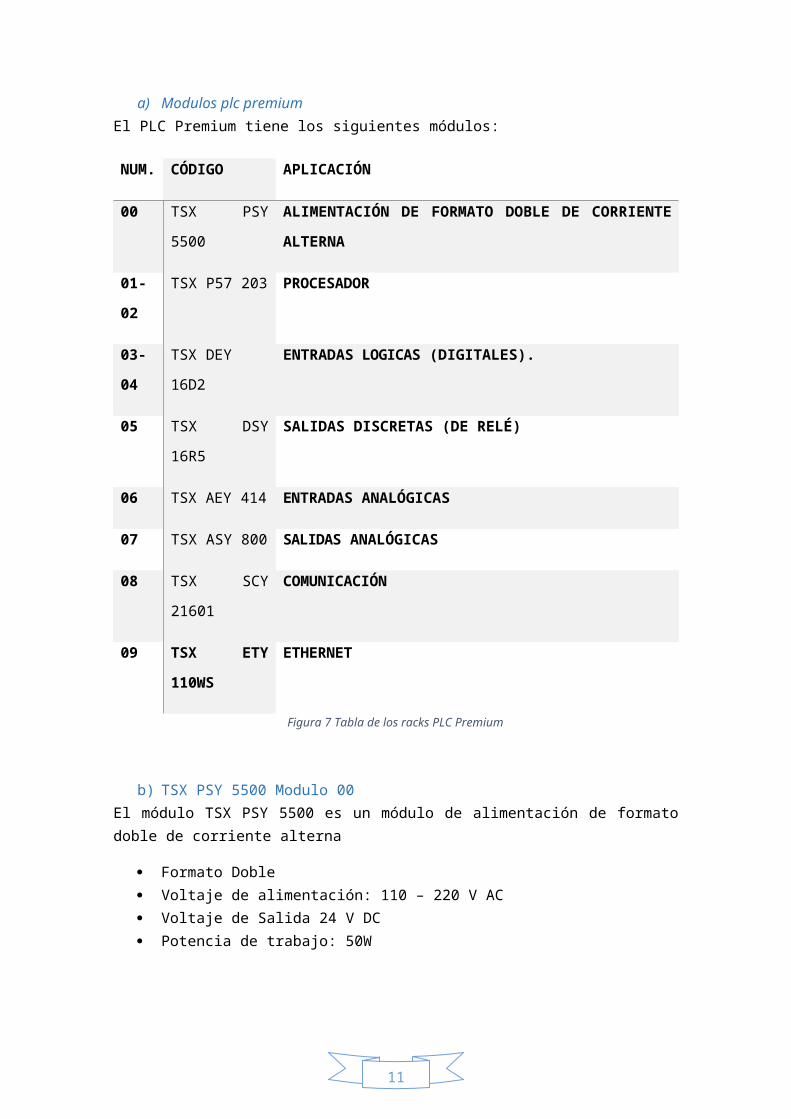
b) Sistema de Cableadoo TSX CSA: cable de bus, par trenzado apantallado.o TSX SCA50: Caja de derivación en T, el matcheo de la impedancia se realiza al final de
la línea.
Figura 4 Modulo SCA 50
o TSX P ACC 01: Caja de conexión usada para la conexión Modicon TSX Micro/Premium al bus UNI-Telway via terminales del puerto PLC. La conexión del cable es integrada en la caja de conexión. Aisla las señales para distancias mayores a 10 metros y es usado para matchear las impedancias de finales de línea.
Figura 5 Módulo P ACC 01
9
2.2. HARDWARE2.2.1.PLC PREMIUM
Esta sobre un rack de 10 slots, y se debe configurar esto en el PL7 PRO v4.5
Figura 6 Modulo PLC Premium
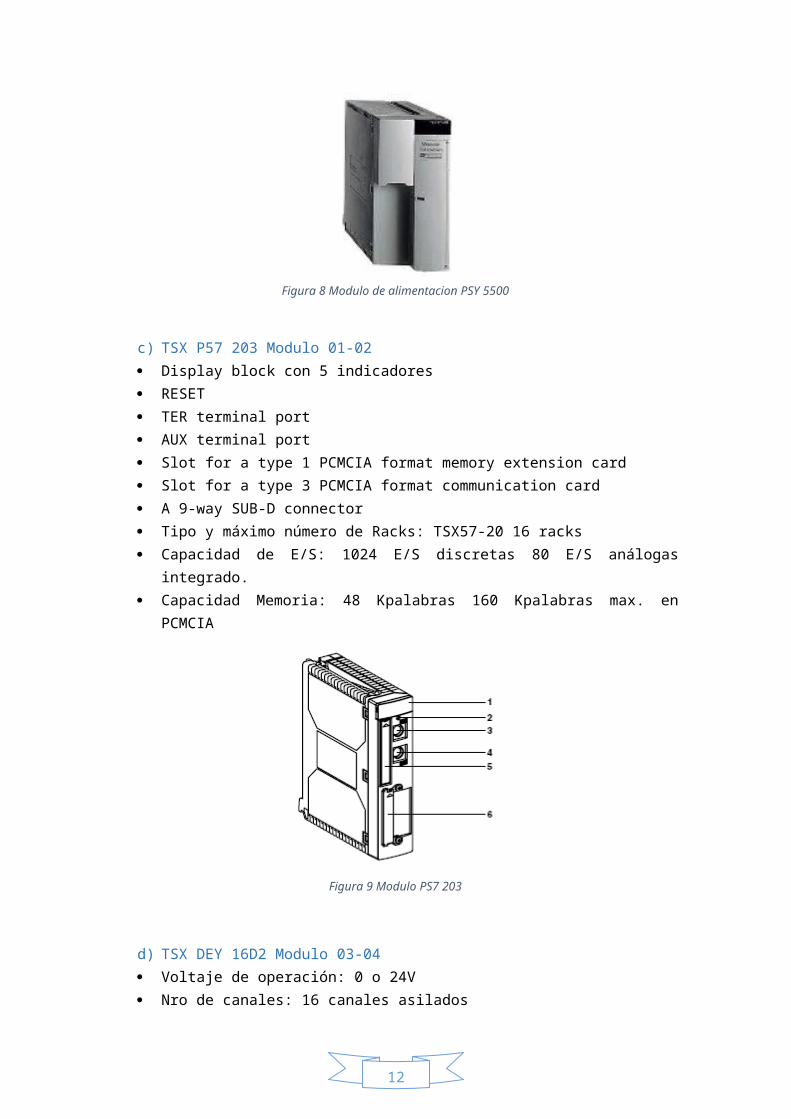
a) Modulos plc premiumEl PLC Premium tiene los siguientes módulos:
NUM. CÓDIGO APLICACIÓN
00 TSX PSY 5500 ALIMENTACIÓN DE FORMATO DOBLE DE CORRIENTE ALTERNA
01-02 TSX P57 203 PROCESADOR
03-04 TSX DEY 16D2 ENTRADAS LOGICAS (DIGITALES).
05 TSX DSY 16R5 SALIDAS DISCRETAS (DE RELÉ)
06 TSX AEY 414 ENTRADAS ANALÓGICAS

10
07 TSX ASY 800 SALIDAS ANALÓGICAS
08 TSX SCY 21601 COMUNICACIÓN
09 TSX ETY 110WS ETHERNET
Figura 7 Tabla de los racks PLC Premium
b) TSX PSY 5500 Modulo 00El módulo TSX PSY 5500 es un módulo de alimentación de formato doble de corriente alterna
Formato Doble Voltaje de alimentación: 110 – 220 V AC Voltaje de Salida 24 V DC Potencia de trabajo: 50W
Figura 8 Modulo de alimentacion PSY 5500
c) TSX P57 203 Modulo 01-02 Display block con 5 indicadores RESET TER terminal port AUX terminal port Slot for a type 1 PCMCIA format memory extension card Slot for a type 3 PCMCIA format communication card A 9-way SUB-D connector Tipo y máximo número de Racks: TSX57-20 16 racks Capacidad de E/S: 1024 E/S discretas 80 E/S análogas integrado. Capacidad Memoria: 48 Kpalabras 160 Kpalabras max. en PCMCIA
11
Figura 9 Modulo PS7 203
d) TSX DEY 16D2 Modulo 03-04 Voltaje de operación: 0 o 24V Nro de canales: 16 canales asilados
Figura 10 Modulo DEY 16D2
e) TSX DSY 16R5 Modulo 05Módulo de salidas discretas (de relé). El módulo TSX DSY 16R5 es un módulo de salidas TON de bloque de terminales de 16 vías de relé, corriente térmica 3A.Las salidas de este módulo no incluyen ningún dispositivo de protección de los contactos; por tanto, es necesario tomar precauciones suplementarias.
Voltaje de operación: 24 VNro de canales: 16 canales
12
Figura 11 Modulo DSY 16R5
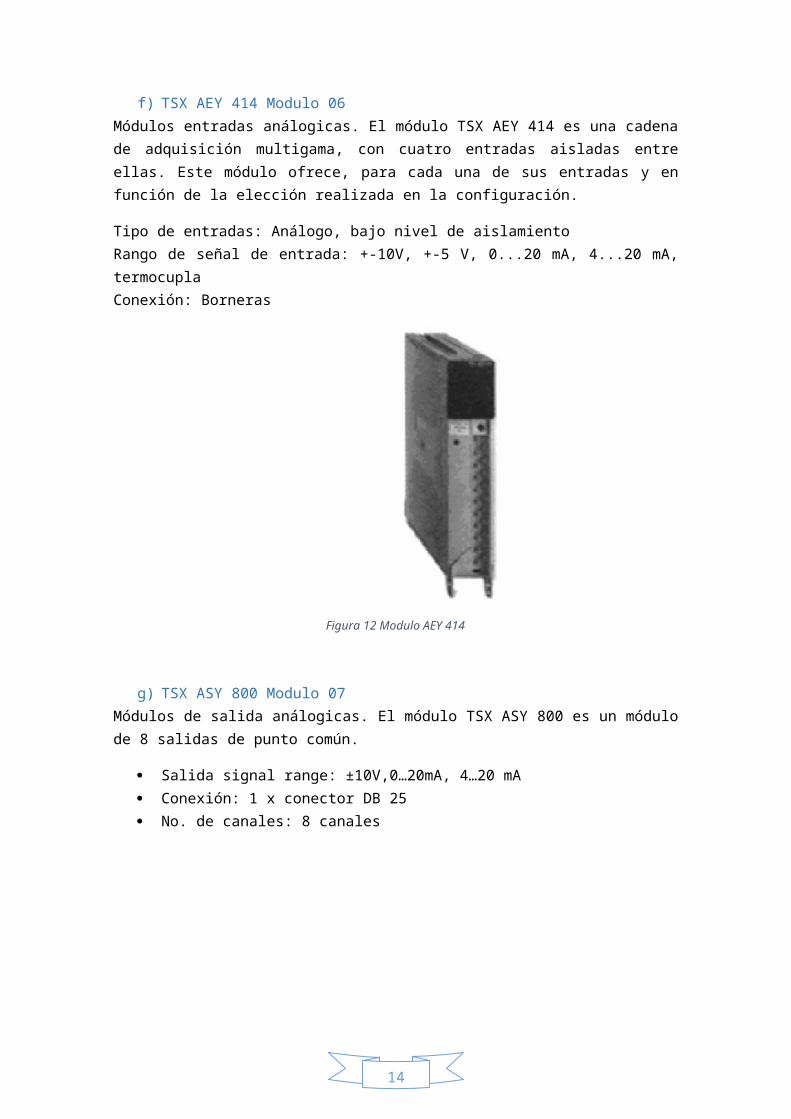
f) TSX AEY 414 Modulo 06Módulos entradas análogicas. El módulo TSX AEY 414 es una cadena de adquisición multigama, con cuatro entradas aisladas entre ellas. Este módulo ofrece, para cada una de sus entradas y en función de la elección realizada en la configuración.
Tipo de entradas: Análogo, bajo nivel de aislamientoRango de señal de entrada: +-10V, +-5 V, 0...20 mA, 4...20 mA, termocuplaConexión: Borneras
Figura 12 Modulo AEY 414
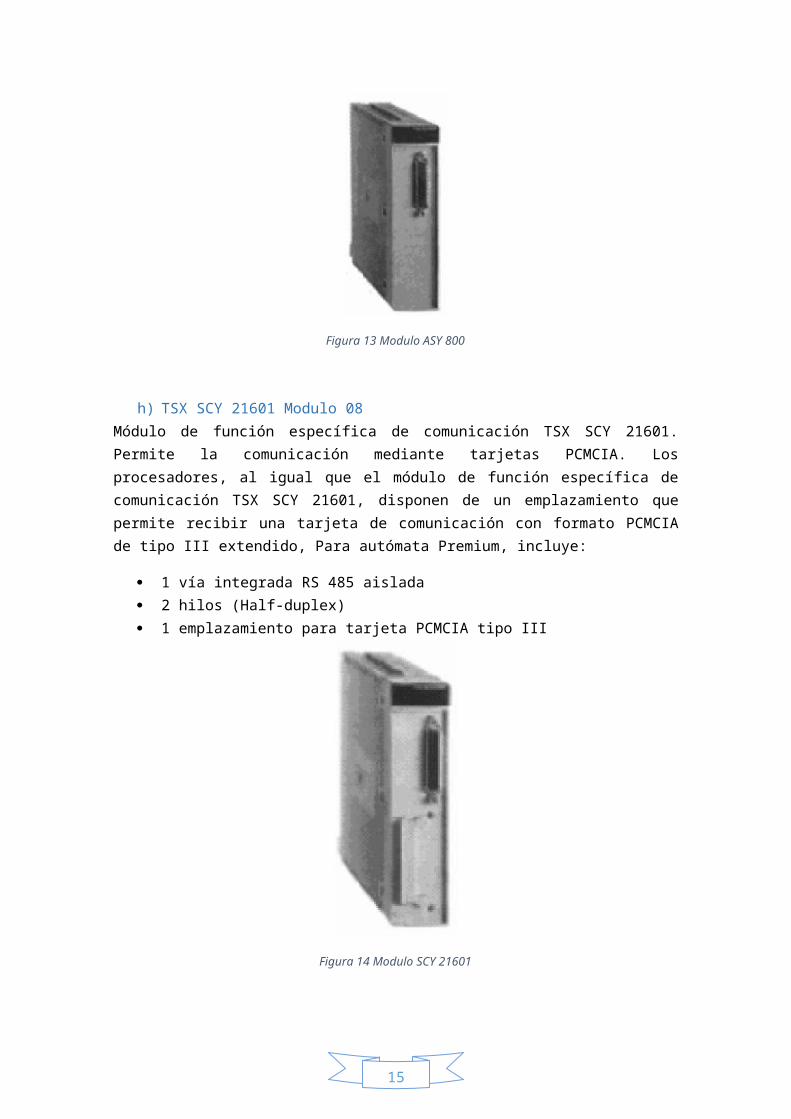
g) TSX ASY 800 Modulo 07Módulos de salida análogicas. El módulo TSX ASY 800 es un módulo de 8 salidas de punto común.

13
Salida signal range: ±10V,0…20mA, 4…20 mA Conexión: 1 x conector DB 25 No. de canales: 8 canales
Figura 13 Modulo ASY 800
h) TSX SCY 21601 Modulo 08Módulo de función específica de comunicación TSX SCY 21601. Permite la comunicación mediante tarjetas PCMCIA. Los procesadores, al igual que el módulo de función específica de comunicación TSX SCY 21601, disponen de un emplazamiento que permite recibir una tarjeta de comunicación con formato PCMCIA de tipo III extendido, Para autómata Premium, incluye:
1 vía integrada RS 485 aislada 2 hilos (Half-duplex) 1 emplazamiento para tarjeta PCMCIA tipo III
Figura 14 Modulo SCY 21601
14
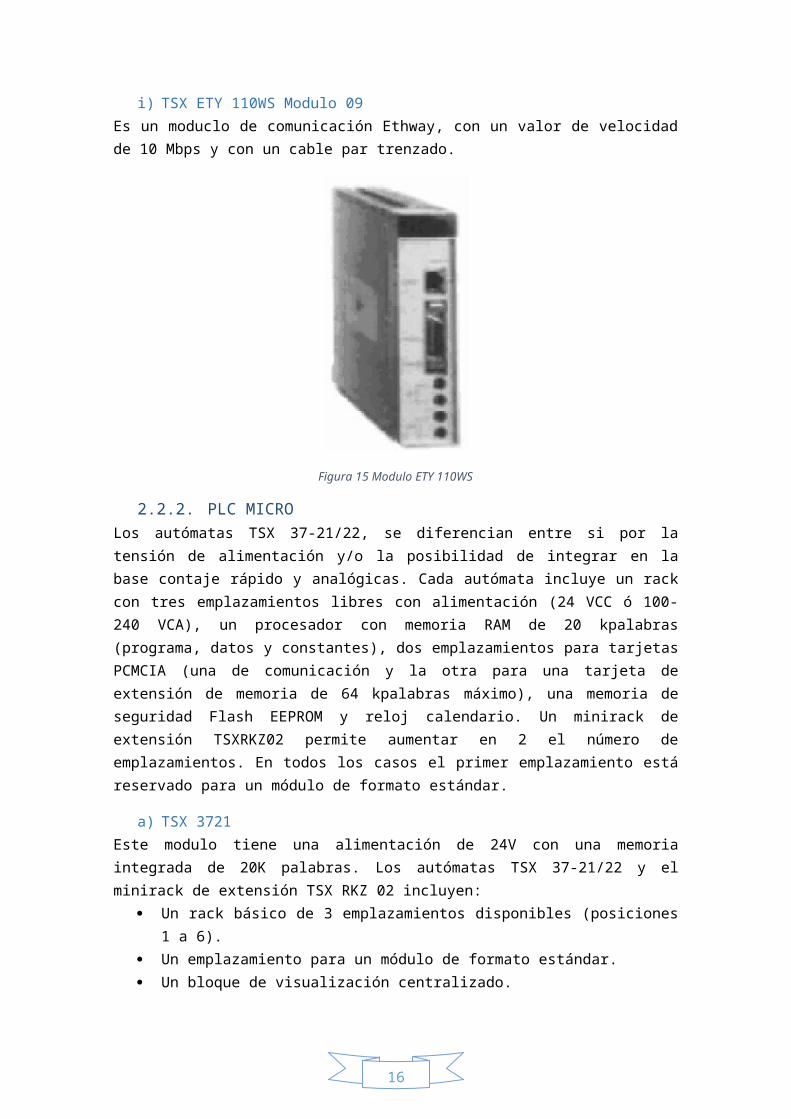
i) TSX ETY 110WS Modulo 09Es un moduclo de comunicación Ethway, con un valor de velocidad de 10 Mbps y con un cable par trenzado.
Figura 15 Modulo ETY 110WS
2.2.2.PLC MICROLos autómatas TSX 37-21/22, se diferencian entre si por la tensión de alimentación y/o la posibilidad de integrar en la base contaje rápido y analógicas. Cada autómata incluye un rack con tres emplazamientos libres con alimentación (24 VCC ó 100-240 VCA), un procesador con memoria RAM de 20 kpalabras (programa, datos y constantes), dos emplazamientos para tarjetas PCMCIA (una de comunicación y la otra para una tarjeta de extensión de memoria de 64 kpalabras máximo), una memoria de seguridad Flash EEPROM y reloj calendario. Un minirack de extensión TSXRKZ02 permite aumentar en 2 el número de emplazamientos. En todos los casos el primer emplazamiento está reservado para un módulo de formato estándar.
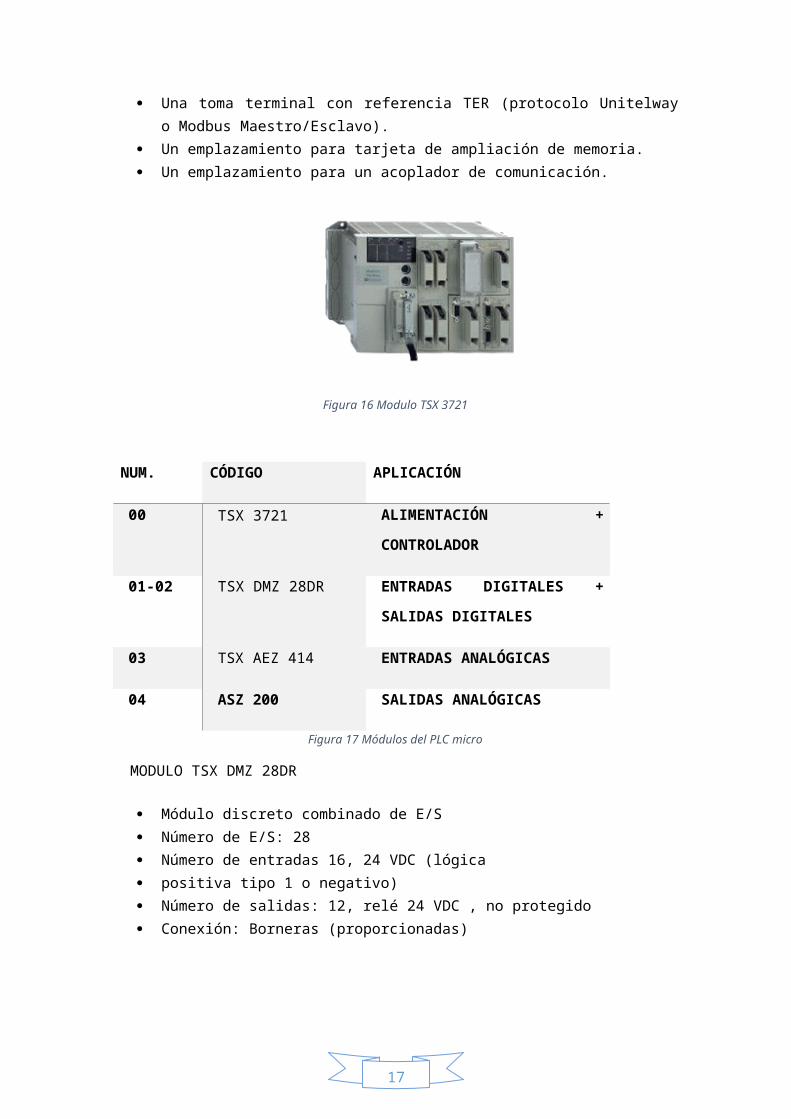
a) TSX 3721Este modulo tiene una alimentación de 24V con una memoria integrada de 20K palabras. Los autómatas TSX 37-21/22 y el minirack de extensión TSX RKZ 02 incluyen:
Un rack básico de 3 emplazamientos disponibles (posiciones 1 a 6). Un emplazamiento para un módulo de formato estándar. Un bloque de visualización centralizado. Una toma terminal con referencia TER (protocolo Unitelway o Modbus
Maestro/Esclavo). Un emplazamiento para tarjeta de ampliación de memoria. Un emplazamiento para un acoplador de comunicación.
15
Figura 16 Modulo TSX 3721
NUM. CÓDIGO APLICACIÓN
00 TSX 3721 ALIMENTACIÓN + CONTROLADOR
01-02 TSX DMZ 28DR ENTRADAS DIGITALES + SALIDAS
DIGITALES
03 TSX AEZ 414 ENTRADAS ANALÓGICAS
04 ASZ 200 SALIDAS ANALÓGICAS
Figura 17 Módulos del PLC micro
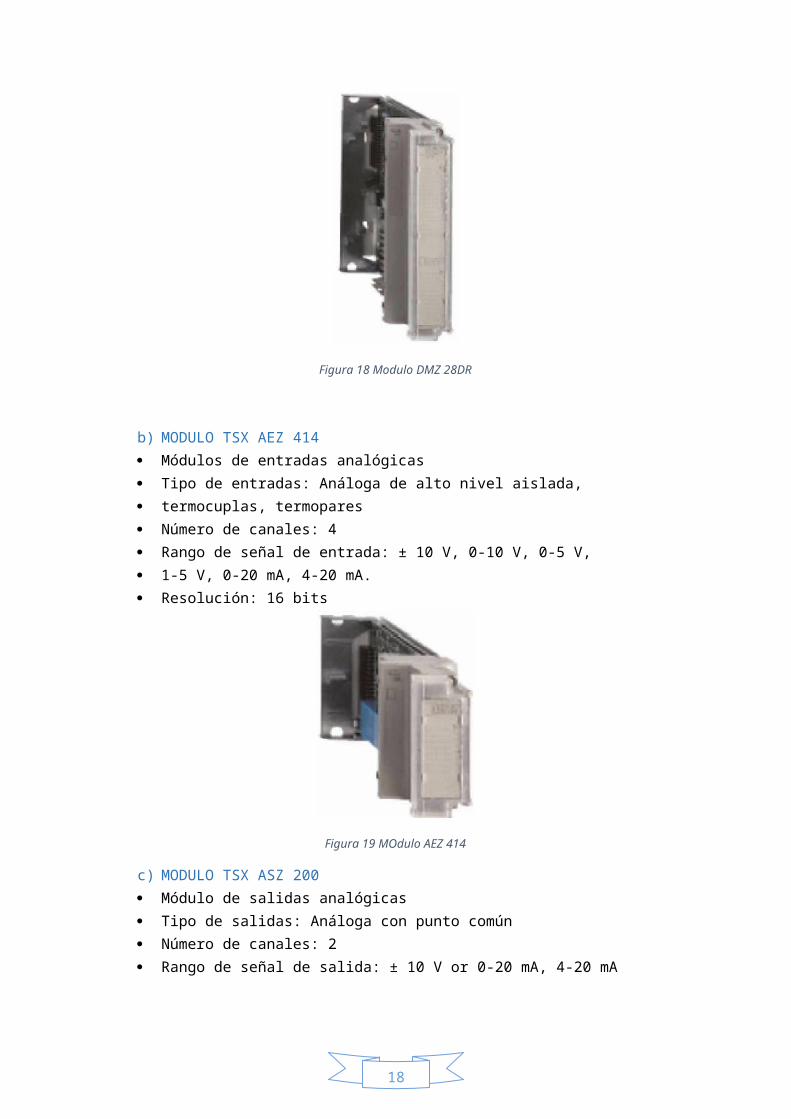
MODULO TSX DMZ 28DR
Módulo discreto combinado de E/S Número de E/S: 28 Número de entradas 16, 24 VDC (lógica positiva tipo 1 o negativo) Número de salidas: 12, relé 24 VDC , no protegido Conexión: Borneras (proporcionadas)
16
Figura 18 Modulo DMZ 28DR
b) MODULO TSX AEZ 414 Módulos de entradas analógicas Tipo de entradas: Análoga de alto nivel aislada, termocuplas, termopares Número de canales: 4 Rango de señal de entrada: ± 10 V, 0-10 V, 0-5 V, 1-5 V, 0-20 mA, 4-20 mA. Resolución: 16 bits
Figura 19 MOdulo AEZ 414
c) MODULO TSX ASZ 200 Módulo de salidas analógicas Tipo de salidas: Análoga con punto común Número de canales: 2 Rango de señal de salida: ± 10 V or 0-20 mA, 4-20 mA
17
Figura 20 Modulo ASZ 200
2.2.3.ALTIVAR31El altivar 31 es un convertidor de frecuencia compacto, monofásico o trifásico, para motores
asincrónicos trifásicos de jaula, desde 0,18 a 15kW. Con las siguientes características:
Figura 21 Modulo ATV31
Arranque y variación de velocidad
Inversión de sentido de marcha
Rampas de aceleración y deceleración
Control Vectorial de flujo
18
Frenado con inyección de Corriente Continua
Frenado dinámico
Regulador PI
Protecciones motor y variador
Re arranque automático
Velocidades preseleccionadas
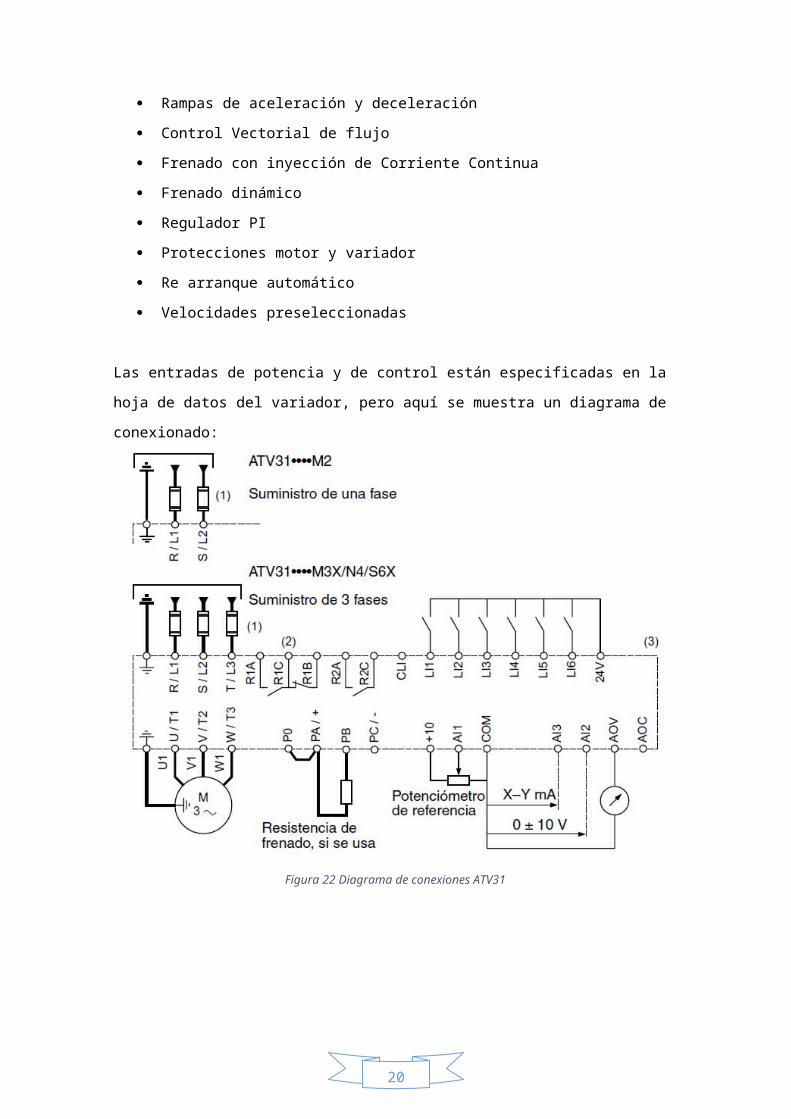
Las entradas de potencia y de control están especificadas en la hoja de datos del variador, pero
aquí se muestra un diagrama de conexionado:
Figura 22 Diagrama de conexiones ATV31
En el laboratorio de Control e Instrumentación se tiene un módulo educativo con borneras de salida para las entradas y salidas de control además de los relés de fallo.

19
Figura 23 Módulo educativo del laboratorio de control
Las diferencias con el Alttivar 28 sin mínimas, pero se usará este variador de velocidad por la comodidad de borneras de salida y conexionado con algún controlador. El altivar 31 contiene los siguientes elementos en su bornera de control:
6 Entradas digitales
1 Entrada analógica de corriente
2 Entradas analógicas de tensión.
1 Salida analógica de corriente y/o tensión.
2 Relés NA para consigna de fallo.
1 Relé NC para consigna de fallo.
20
2.3. SOFTWARE2.3.1.PL7 PRO/JUNIOR
PL7 es un software de configuración y programación de Schneider Electric para su gama de PLCs Modicon
Figura 24 Imagen PL7
Este software incluye una amplia gama de PLCs de Schneider Electric y el lenguaje de programación es Ladder, que facilita o simplifica el proceso de manipulación de estos.
En el mismo software podemos configurar los módulos de entradas y salida de los PLCs ha ser usados.
Figura 25 interfase PL7

21
2.3.2.P-CIMEs un software de supervisión y control. Este mantiene, diseña o realiza proyectos de ingeniería de sistemas automatizados.
En este software podemos encontrar un editor de animaciones, base de datos, estaciones de trabajo de operador, visualización de eventos, administración de alarmas, visualización de eventos, almacenamiento de datos, servidor de comunicaciones, etc.
Figura 26 imagen P-CIM
Actualmente el software ya está siendo reemplazado por PULSE, que es el nuevo software SCADA del fabricante AFCON.
Figura 27 Imagen nuevo software PULSE
22
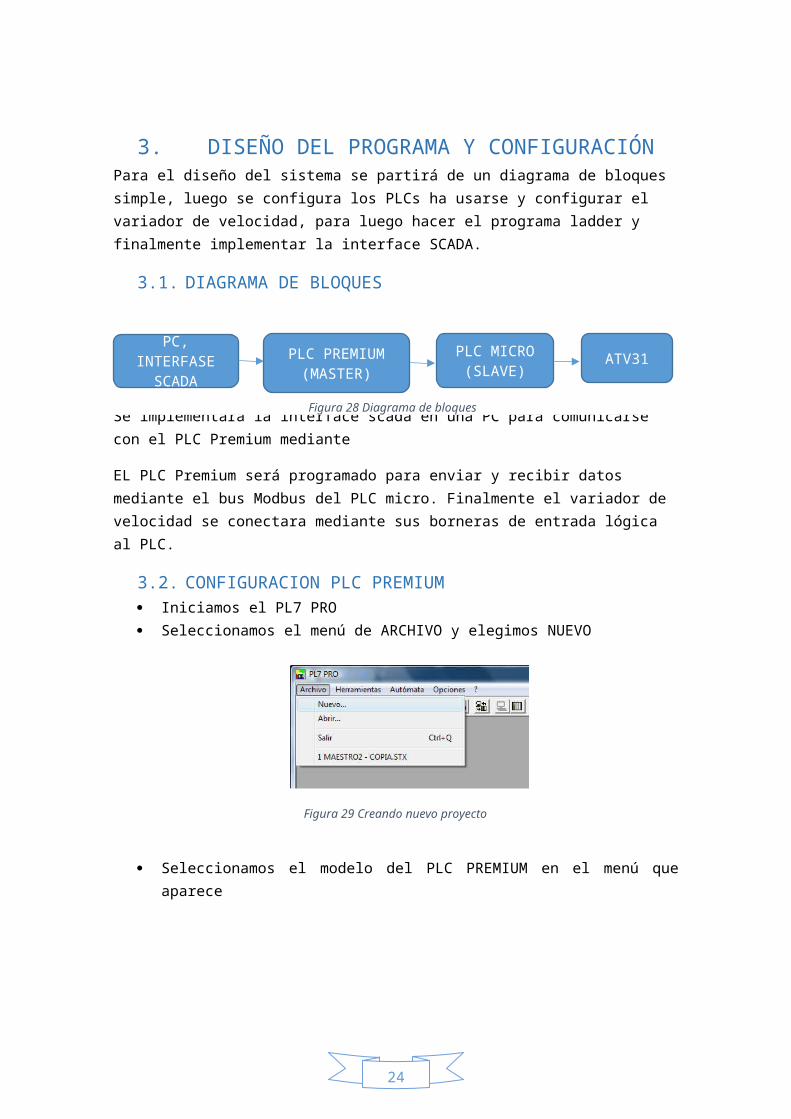
3. DISEÑO DEL PROGRAMA Y CONFIGURACIÓNPara el diseño del sistema se partirá de un diagrama de bloques simple, luego se configura los PLCs ha usarse y configurar el variador de velocidad, para luego hacer el programa ladder y finalmente implementar la interface SCADA.
3.1. DIAGRAMA DE BLOQUES
Se implementara la interface scada en una PC para comunicarse con el PLC Premium mediante
EL PLC Premium será programado para enviar y recibir datos mediante el bus Modbus del PLC micro. Finalmente el variador de velocidad se conectara mediante sus borneras de entrada lógica al PLC.
3.2. CONFIGURACION PLC PREMIUM Iniciamos el PL7 PRO Seleccionamos el menú de ARCHIVO y elegimos NUEVO
Figura 29 Creando nuevo proyecto
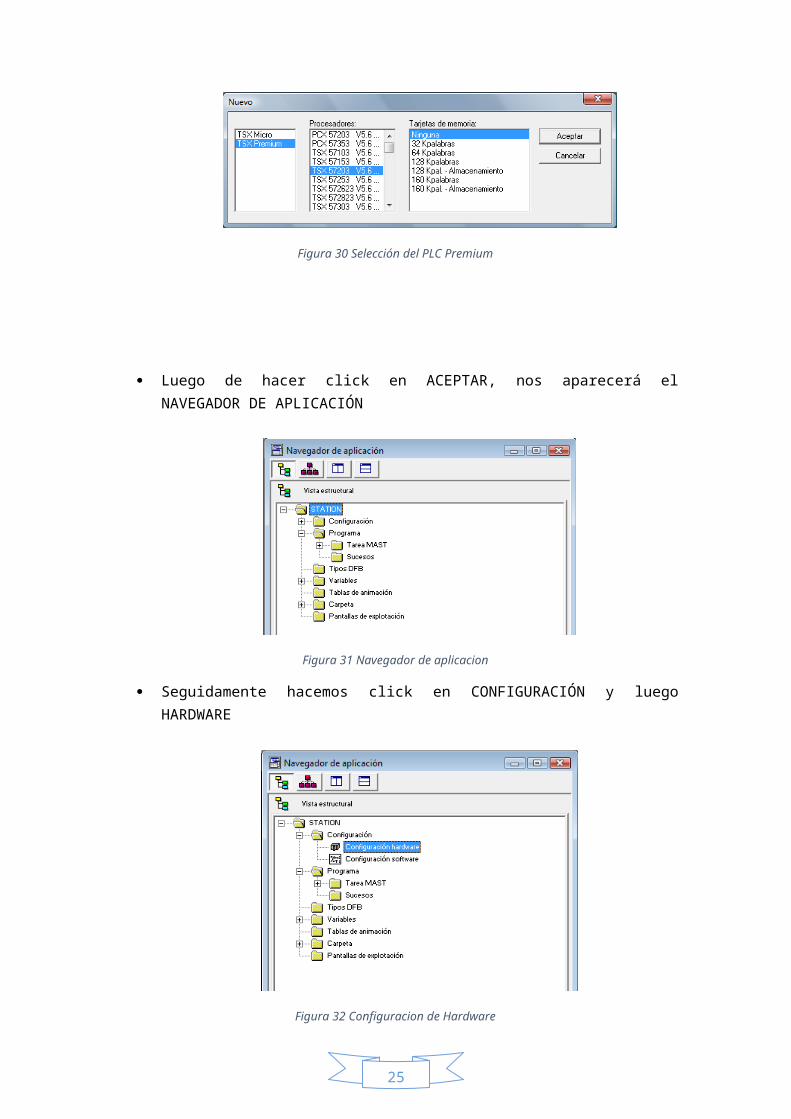
Seleccionamos el modelo del PLC PREMIUM en el menú que aparece
Figura 30 Selección del PLC Premium
ATV31PLC MICRO (SLAVE)
PLC PREMIUM (MASTER)
PC, INTERFASE SCADA
Figura 28 Diagrama de bloques
23
Luego de hacer click en ACEPTAR, nos aparecerá el NAVEGADOR DE APLICACIÓN
Figura 31 Navegador de aplicacion
Seguidamente hacemos click en CONFIGURACIÓN y luego HARDWARE
Figura 32 Configuracion de Hardware
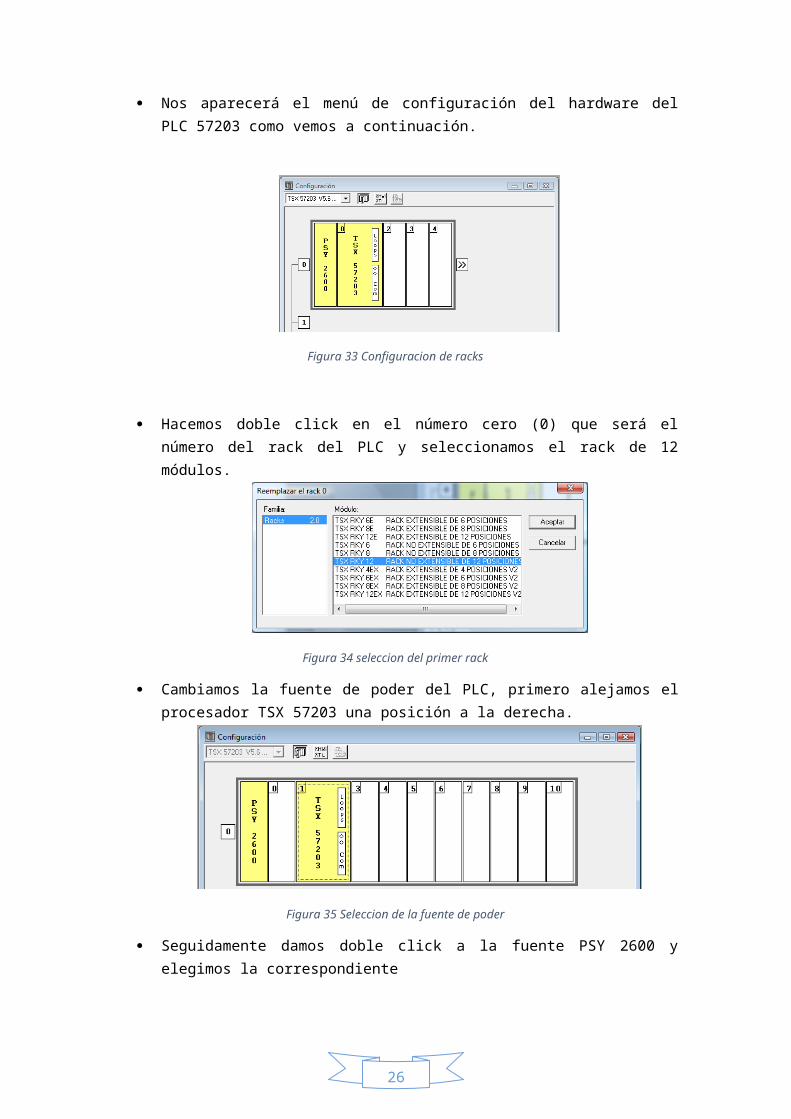
Nos aparecerá el menú de configuración del hardware del PLC 57203 como vemos a continuación.
Figura 33 Configuracion de racks
24
Hacemos doble click en el número cero (0) que será el número del rack del PLC y seleccionamos el rack de 12 módulos.
Figura 34 seleccion del primer rack
Cambiamos la fuente de poder del PLC, primero alejamos el procesador TSX 57203 una posición a la derecha.
Figura 35 Seleccion de la fuente de poder
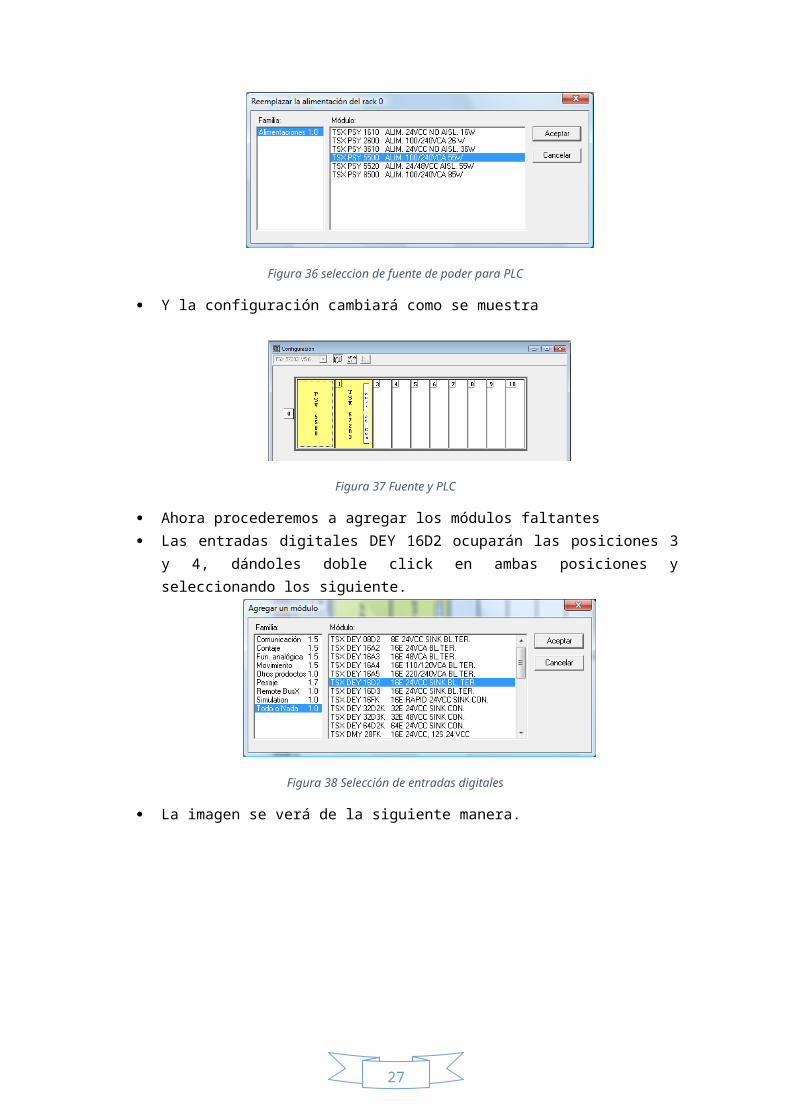
Seguidamente damos doble click a la fuente PSY 2600 y elegimos la correspondiente
Figura 36 seleccion de fuente de poder para PLC
Y la configuración cambiará como se muestra
Figura 37 Fuente y PLC
25
Ahora procederemos a agregar los módulos faltantes Las entradas digitales DEY 16D2 ocuparán las posiciones 3 y 4, dándoles doble click en
ambas posiciones y seleccionando los siguiente.
Figura 38 Selección de entradas digitales
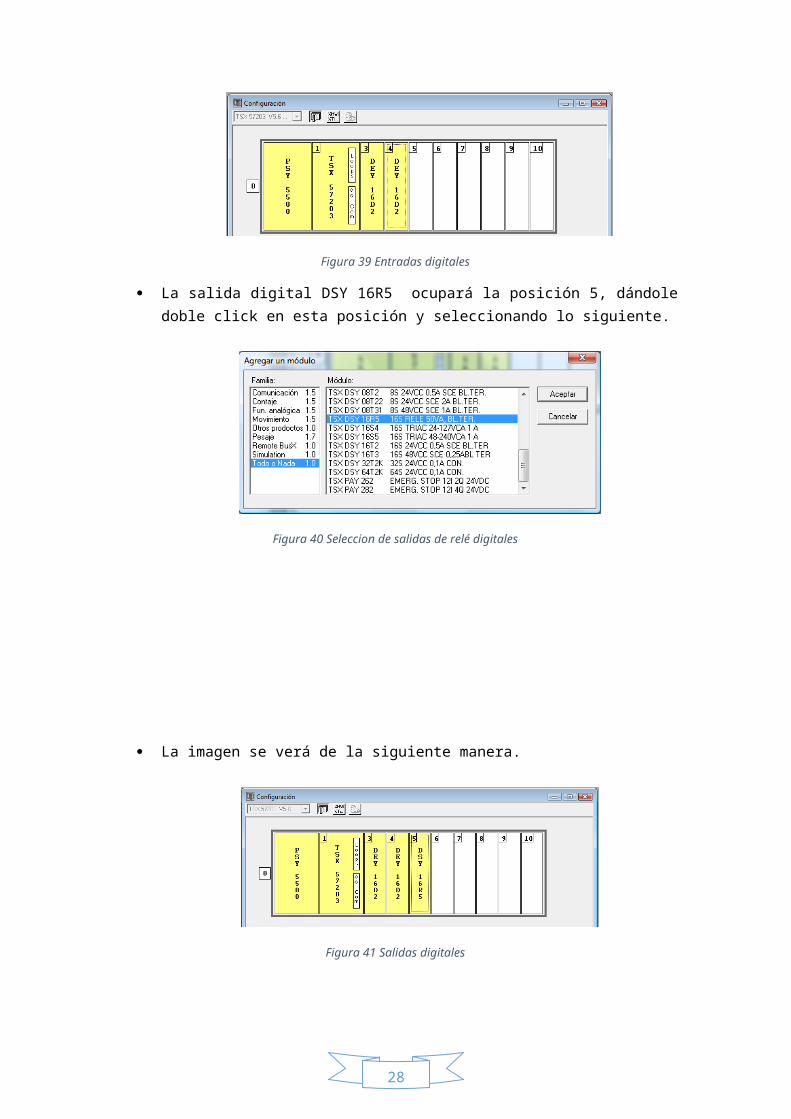
La imagen se verá de la siguiente manera.
Figura 39 Entradas digitales
La salida digital DSY 16R5 ocupará la posición 5, dándole doble click en esta posición y seleccionando lo siguiente.
Figura 40 Seleccion de salidas de relé digitales
26
La imagen se verá de la siguiente manera.
Figura 41 Salidas digitales
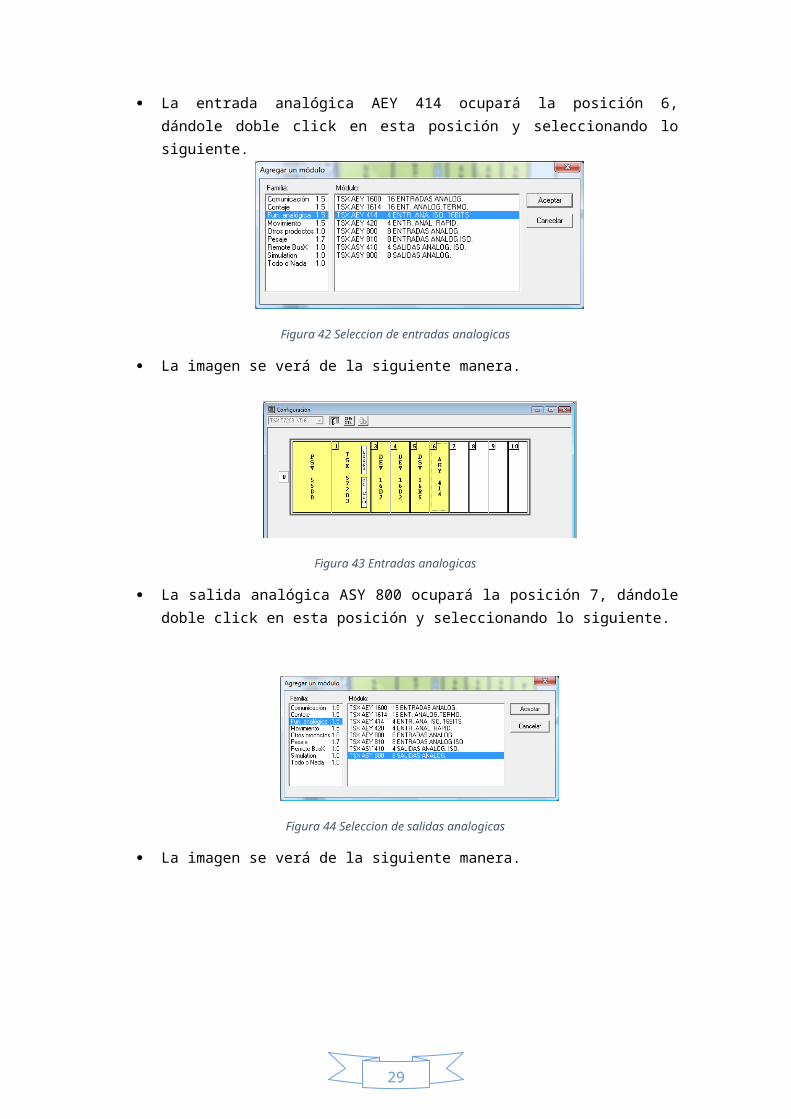
La entrada analógica AEY 414 ocupará la posición 6, dándole doble click en esta posición y seleccionando lo siguiente.
Figura 42 Seleccion de entradas analogicas
La imagen se verá de la siguiente manera.
Figura 43 Entradas analogicas
La salida analógica ASY 800 ocupará la posición 7, dándole doble click en esta posición y seleccionando lo siguiente.
Figura 44 Seleccion de salidas analogicas
27
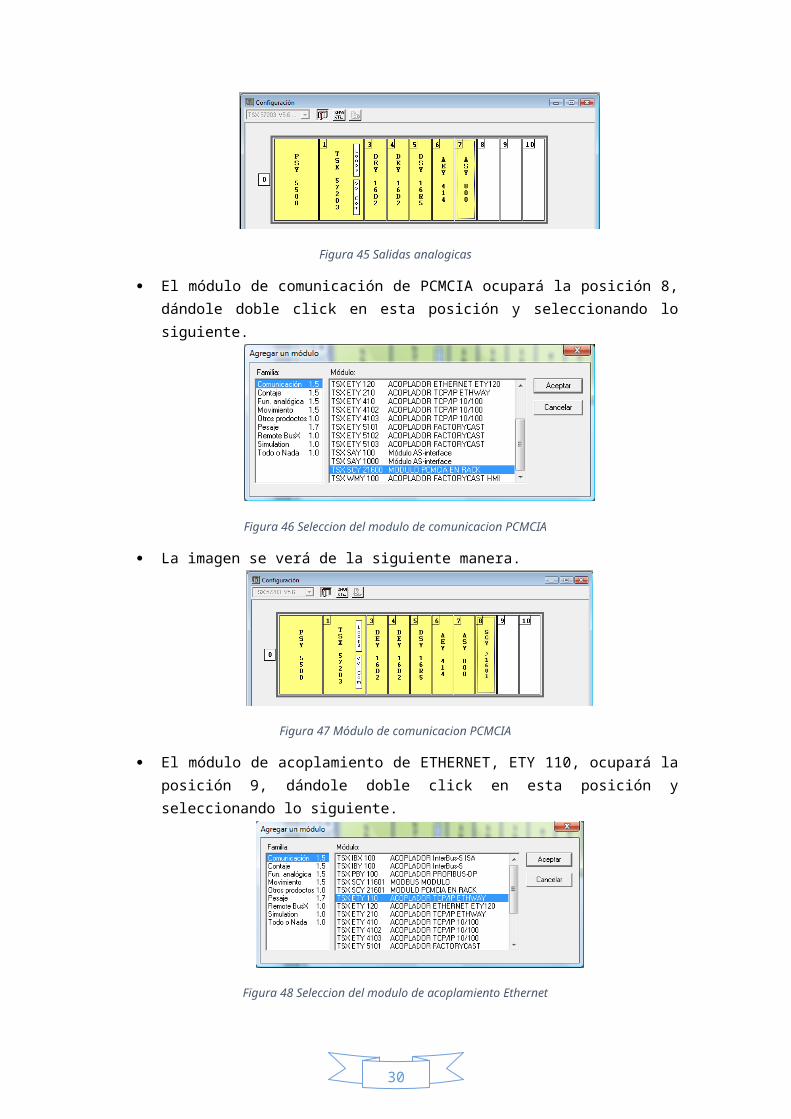
La imagen se verá de la siguiente manera.
Figura 45 Salidas analogicas
El módulo de comunicación de PCMCIA ocupará la posición 8, dándole doble click en esta posición y seleccionando lo siguiente.
Figura 46 Seleccion del modulo de comunicacion PCMCIA
La imagen se verá de la siguiente manera.
Figura 47 Módulo de comunicacion PCMCIA
El módulo de acoplamiento de ETHERNET, ETY 110, ocupará la posición 9, dándole doble click en esta posición y seleccionando lo siguiente.
Figura 48 Seleccion del modulo de acoplamiento Ethernet
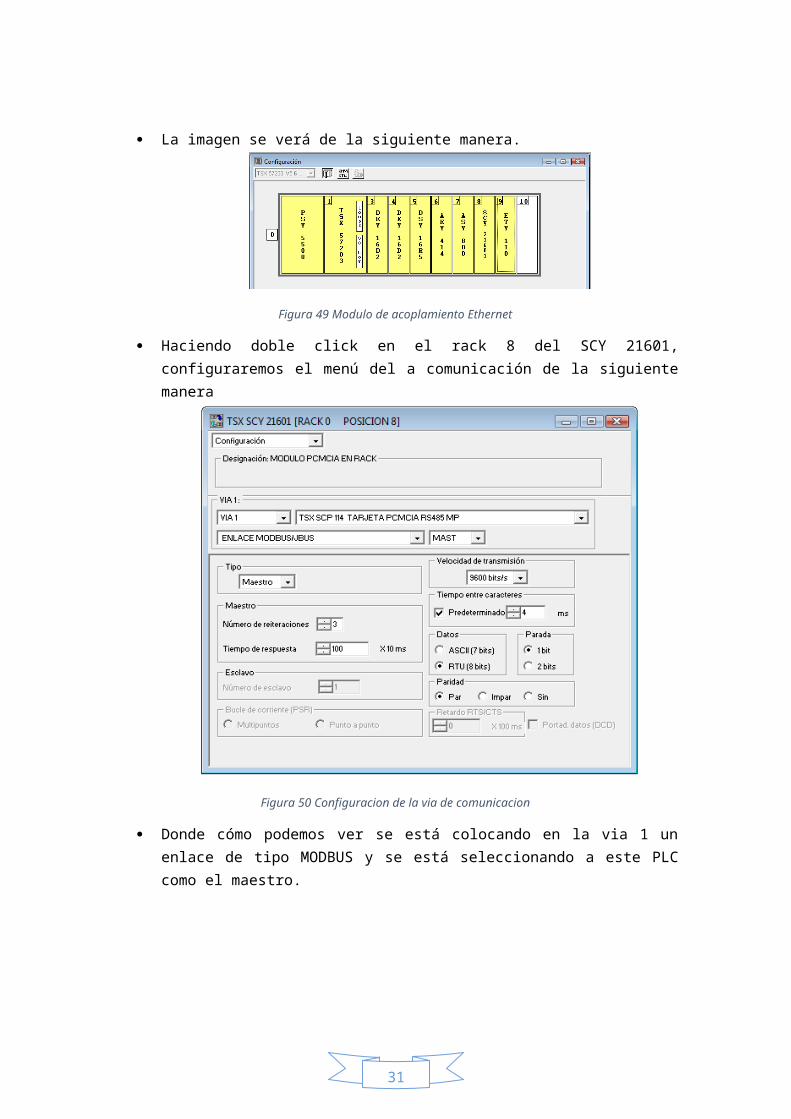
La imagen se verá de la siguiente manera.
28
Figura 49 Modulo de acoplamiento Ethernet
Haciendo doble click en el rack 8 del SCY 21601, configuraremos el menú del a comunicación de la siguiente manera
Figura 50 Configuracion de la via de comunicacion
Donde cómo podemos ver se está colocando en la via 1 un enlace de tipo MODBUS y se está seleccionando a este PLC como el maestro.
29
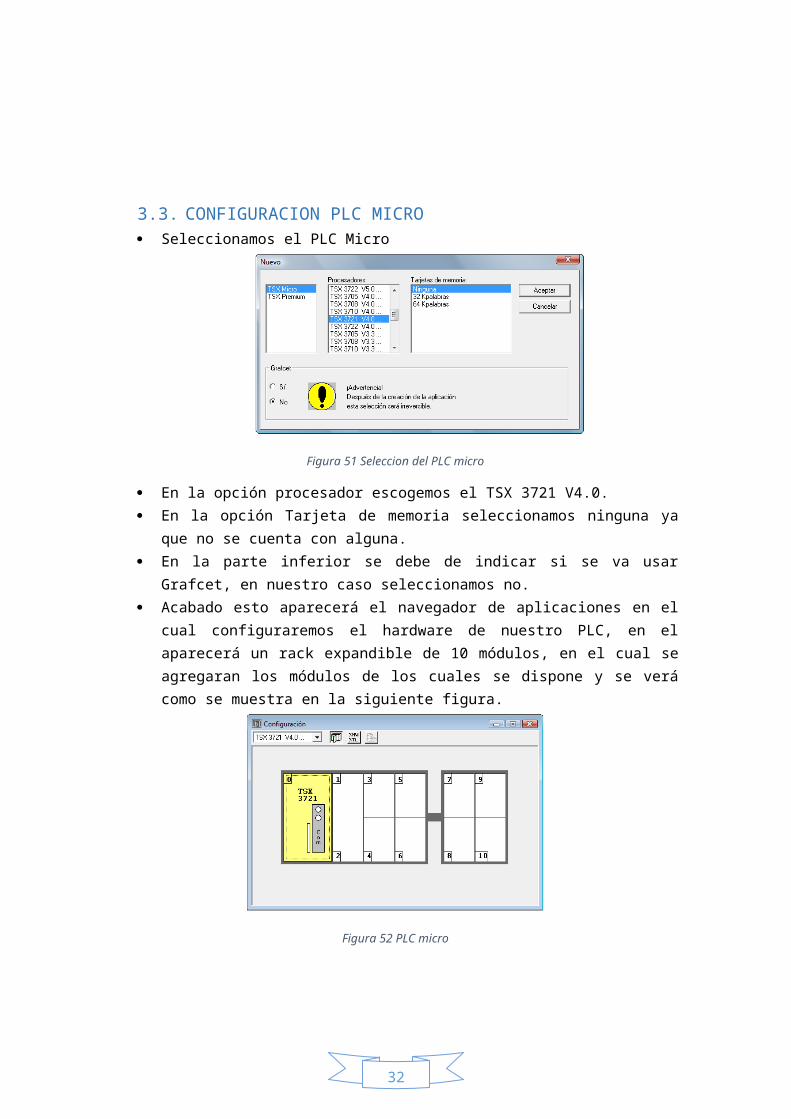
3.3. CONFIGURACION PLC MICRO Seleccionamos el PLC Micro
Figura 51 Seleccion del PLC micro
En la opción procesador escogemos el TSX 3721 V4.0. En la opción Tarjeta de memoria seleccionamos ninguna ya que no se cuenta con
alguna. En la parte inferior se debe de indicar si se va usar Grafcet, en nuestro caso
seleccionamos no. Acabado esto aparecerá el navegador de aplicaciones en el cual configuraremos el
hardware de nuestro PLC, en el aparecerá un rack expandible de 10 módulos, en el cual se agregaran los módulos de los cuales se dispone y se verá como se muestra en la siguiente figura.
Figura 52 PLC micro
30
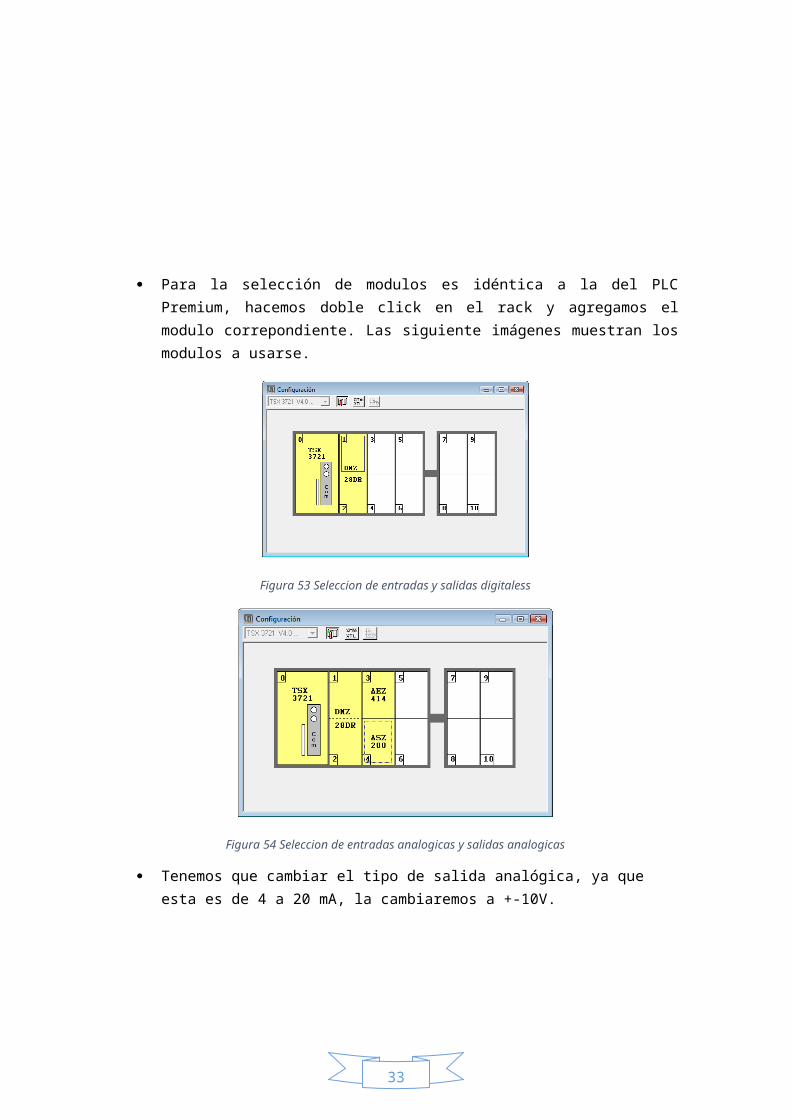
Para la selección de modulos es idéntica a la del PLC Premium, hacemos doble click en el rack y agregamos el modulo correpondiente. Las siguiente imágenes muestran los modulos a usarse.
Figura 53 Seleccion de entradas y salidas digitaless
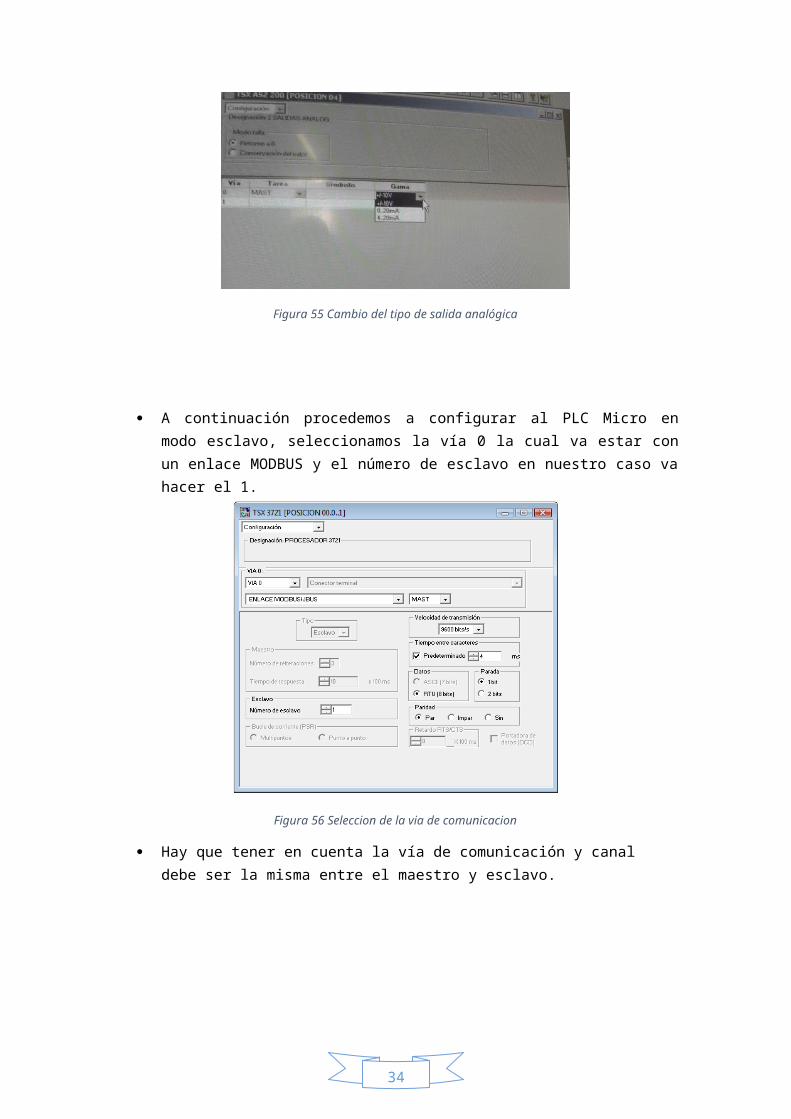
Figura 54 Seleccion de entradas analogicas y salidas analogicas
Tenemos que cambiar el tipo de salida analógica, ya que esta es de 4 a 20 mA, la cambiaremos a +-10V.
Figura 55 Cambio del tipo de salida analógica
31
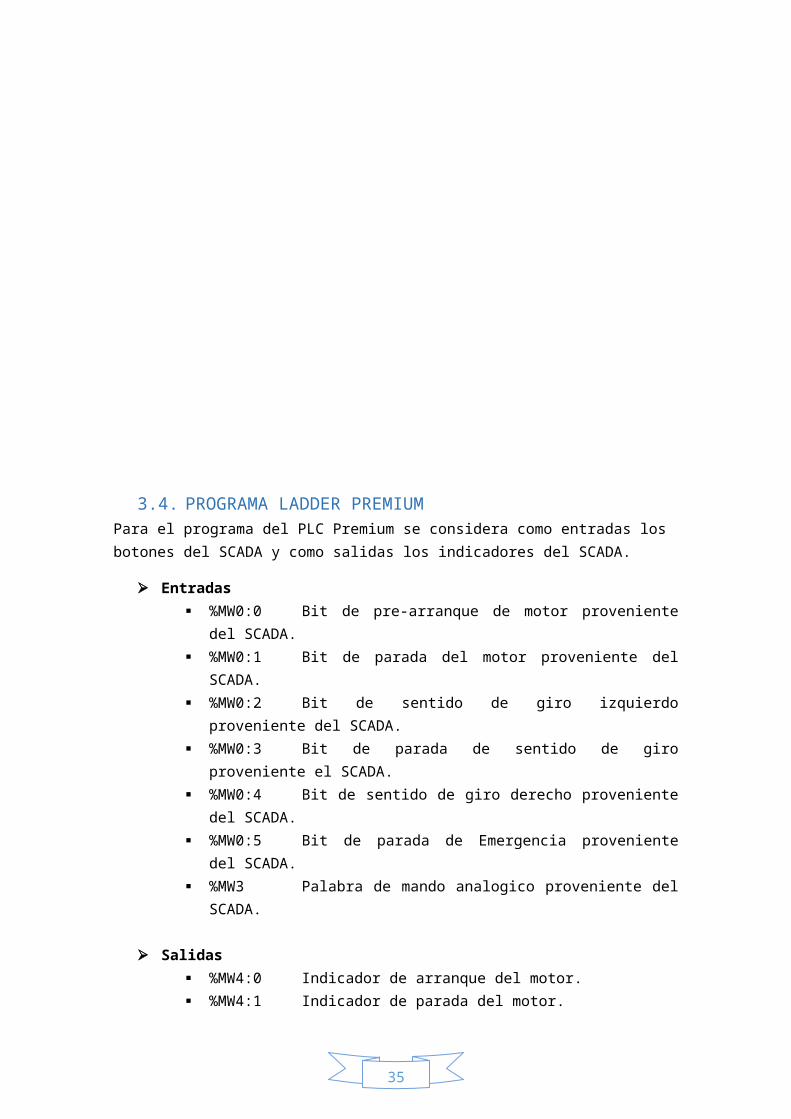
A continuación procedemos a configurar al PLC Micro en modo esclavo, seleccionamos la vía 0 la cual va estar con un enlace MODBUS y el número de esclavo en nuestro caso va hacer el 1.
Figura 56 Seleccion de la via de comunicacion
Hay que tener en cuenta la vía de comunicación y canal debe ser la misma entre el maestro y esclavo.
32
3.4. PROGRAMA LADDER PREMIUMPara el programa del PLC Premium se considera como entradas los botones del SCADA y como salidas los indicadores del SCADA.
Entradas %MW0:0 Bit de pre-arranque de motor proveniente del SCADA. %MW0:1 Bit de parada del motor proveniente del SCADA. %MW0:2 Bit de sentido de giro izquierdo proveniente del SCADA. %MW0:3 Bit de parada de sentido de giro proveniente el SCADA. %MW0:4 Bit de sentido de giro derecho proveniente del SCADA. %MW0:5 Bit de parada de Emergencia proveniente del SCADA. %MW3 Palabra de mando analogico proveniente del SCADA.
Salidas %MW4:0 Indicador de arranque del motor. %MW4:1 Indicador de parada del motor. %MW4:2 Indicador de sentido de giro izquierdo. %MW4:3 Indicador de sentido de giro derecho. %MW4:4 Indicador de fallo en el motor. %MW4:5 Indicador de prearranque en proceso. %MW6 Indicador de la salida analógica.
Desde el Premium se escribe los siguientes bits y palabras en el Micro: %MW1:0 Escritura de prearranque. %MW1:1 Escritura de parada. %MW1:2 Escritura de emergencia. %MW2 Escritura de parada y sentidos de giro. %MW3 Escritura del mando analógico.
Desde el Premium se leen los siguientes bits y palabras del Micro: %MW5:0 Lectura de manual/automatico. %MW5:1 Lectura de fallo. %MW5:2 Lectura de inicio del motor. %MW5:3 Lectura de parada del motor. %MW5:4 Lectura de sentido izquierdo del motor. %MW5:5 Lectura de sentido derecho del motor. %MW5:6 Lectura del temporizador de prearranque. %MW5:7 Lectura de emergencia. %MW5:8 Lectura de darse por enterado. %MW5:9 Lectura de emergencia para SCADA. %MW6 Lectura de señal analógica del variador.
El proyecto creado se llama programa_p_f.tsx y el nombre de la programacion ladder es PLC PREMIUM.
33
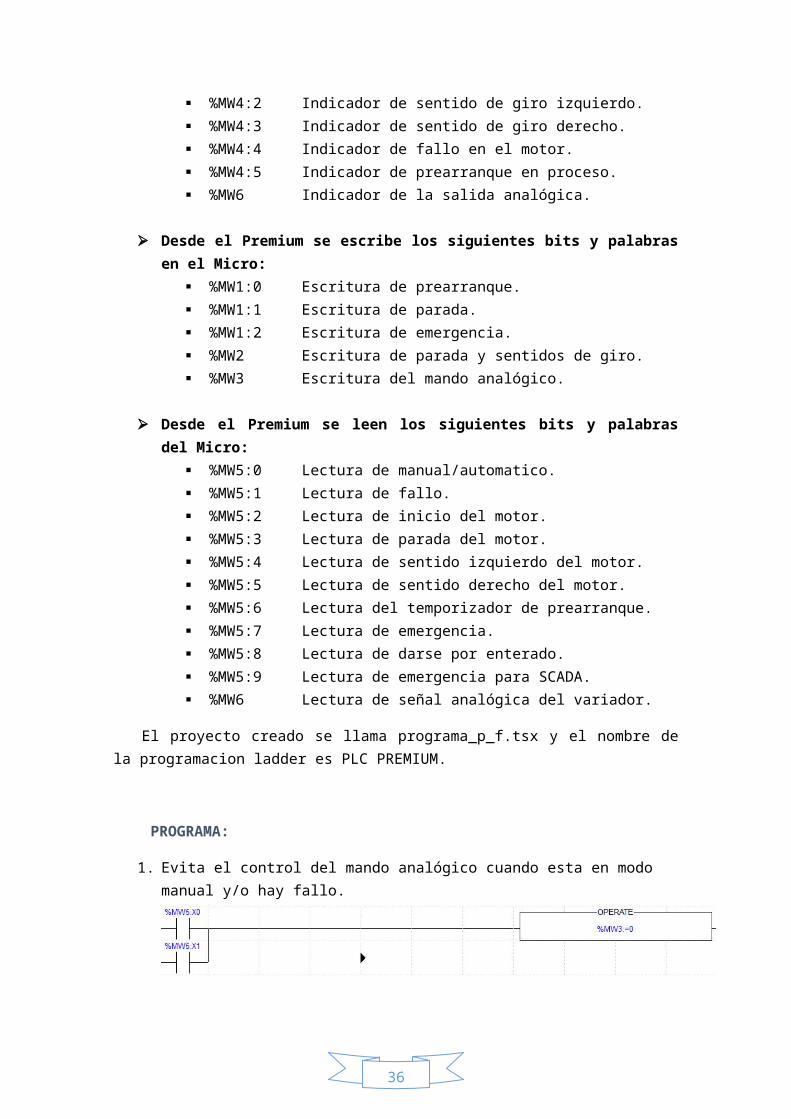
PROGRAMA:
1. Evita el control del mando analógico cuando esta en modo manual y/o hay fallo.
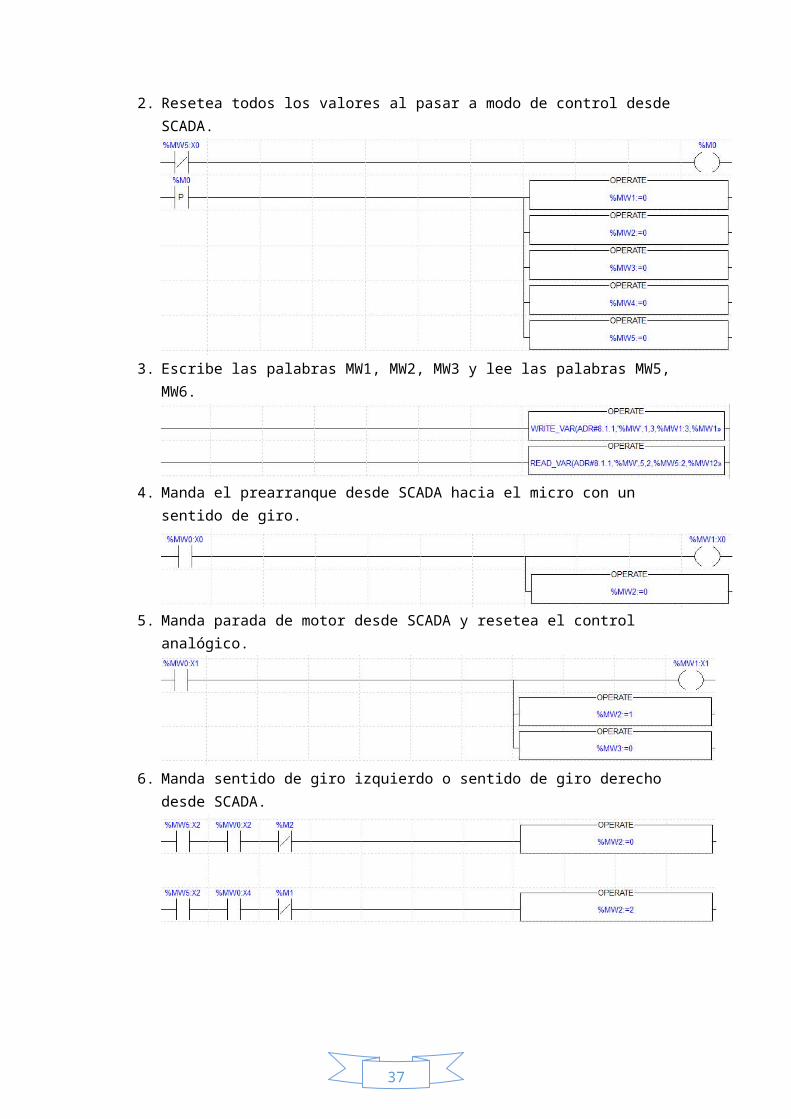
2. Resetea todos los valores al pasar a modo de control desde SCADA.
3. Escribe las palabras MW1, MW2, MW3 y lee las palabras MW5, MW6.
4. Manda el prearranque desde SCADA hacia el micro con un sentido de giro.
5. Manda parada de motor desde SCADA y resetea el control analógico.
6. Manda sentido de giro izquierdo o sentido de giro derecho desde SCADA.
34
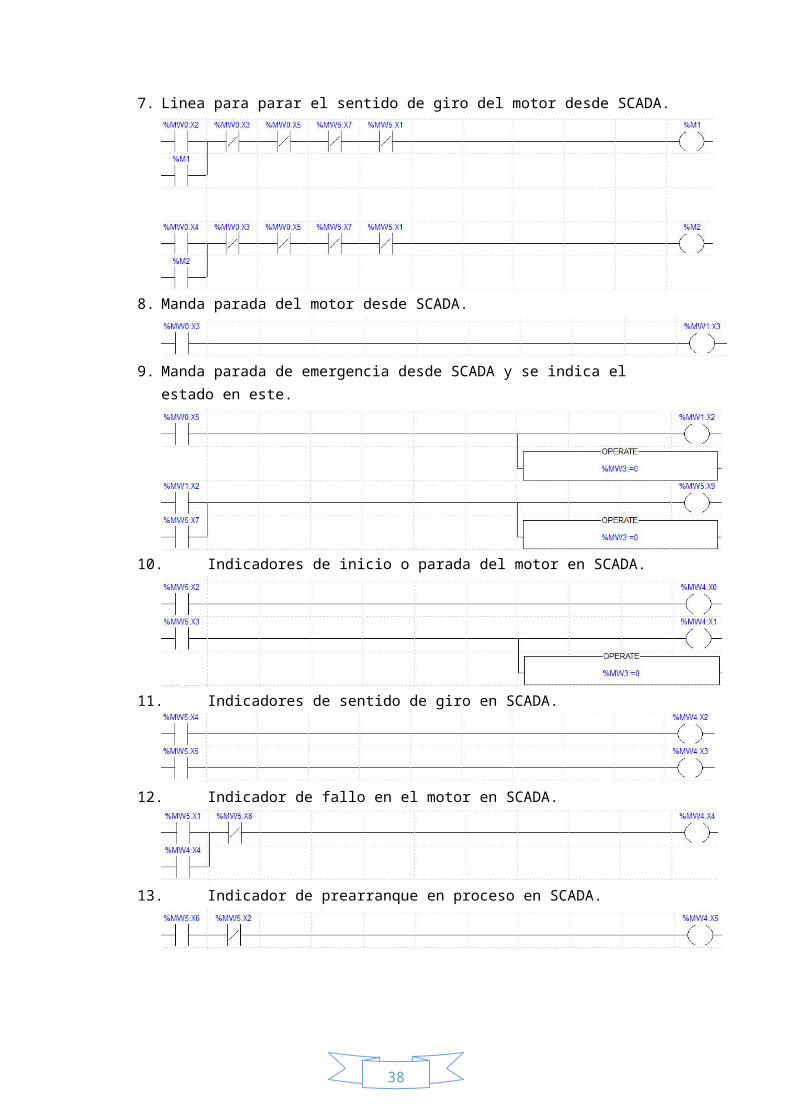
7. Linea para parar el sentido de giro del motor desde SCADA.
8. Manda parada del motor desde SCADA.
9. Manda parada de emergencia desde SCADA y se indica el estado en este.
10. Indicadores de inicio o parada del motor en SCADA.
11. Indicadores de sentido de giro en SCADA.
12. Indicador de fallo en el motor en SCADA.
13. Indicador de prearranque en proceso en SCADA.
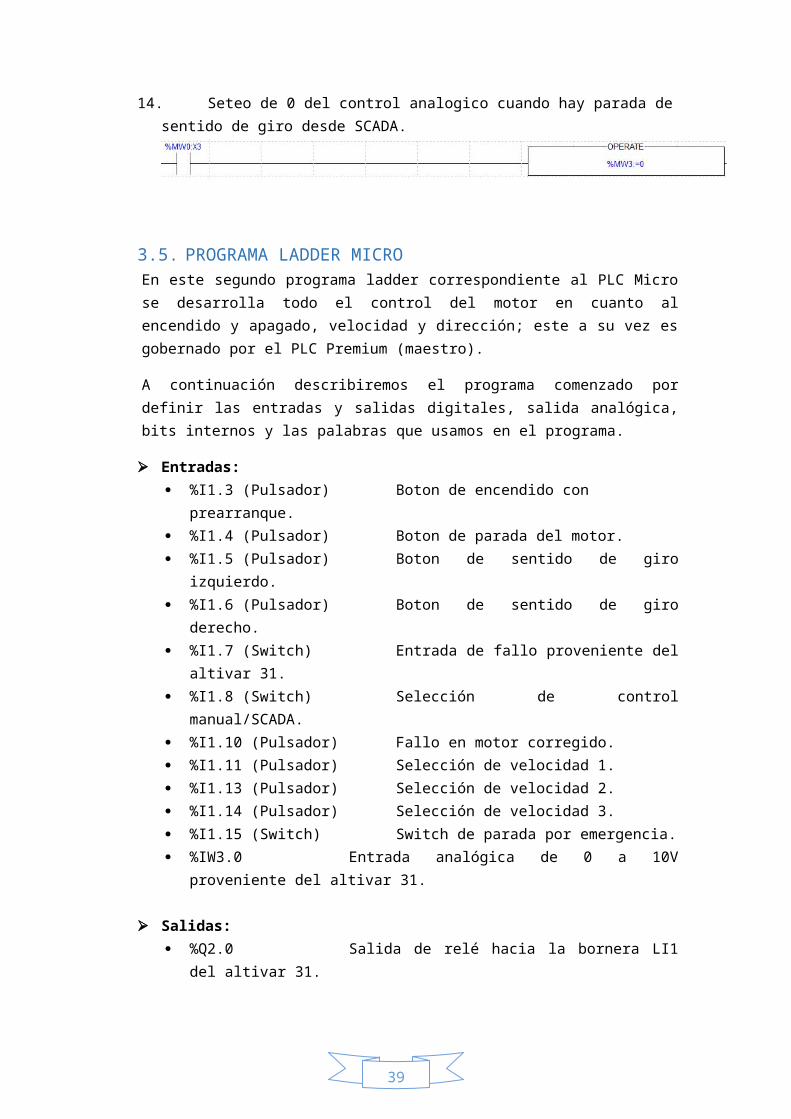
14. Seteo de 0 del control analogico cuando hay parada de sentido de giro desde SCADA.
35
3.5. PROGRAMA LADDER MICROEn este segundo programa ladder correspondiente al PLC Micro se desarrolla todo el control del motor en cuanto al encendido y apagado, velocidad y dirección; este a su vez es gobernado por el PLC Premium (maestro).
A continuación describiremos el programa comenzado por definir las entradas y salidas digitales, salida analógica, bits internos y las palabras que usamos en el programa.
Entradas: %I1.3 (Pulsador) Boton de encendido con prearranque. %I1.4 (Pulsador) Boton de parada del motor. %I1.5 (Pulsador) Boton de sentido de giro izquierdo. %I1.6 (Pulsador) Boton de sentido de giro derecho. %I1.7 (Switch) Entrada de fallo proveniente del altivar 31. %I1.8 (Switch) Selección de control manual/SCADA. %I1.10 (Pulsador) Fallo en motor corregido. %I1.11 (Pulsador) Selección de velocidad 1. %I1.13 (Pulsador) Selección de velocidad 2. %I1.14 (Pulsador) Selección de velocidad 3. %I1.15 (Switch) Switch de parada por emergencia. %IW3.0 Entrada analógica de 0 a 10V proveniente del altivar
31.
Salidas: %Q2.0 Salida de relé hacia la bornera LI1 del altivar 31. %Q2.1 Salida de relé hacia la bornera LI2 del altivar 31. %QW4.1 Salida analógica hacia la bornera AI2 del altivar 31.
Bits internos: %M0 Bit de habilitación de inicio. %M1 Bit de habilitación del sentido izquierdo. %M2 Bit de habilitación de parada. %M3 Bit de habilitación del sentido derecho. %M4 Bit de habilitación de prearranque.
Palabras usadas: %MW1 Mando de inicio, parada y emergencia. %MW2 Mando de sentido y parada de giro. %MW3 Mando de control analógico. %MW5 Indicadores para el SCADA. %MW6 Indicador de la entrada analógica.
36
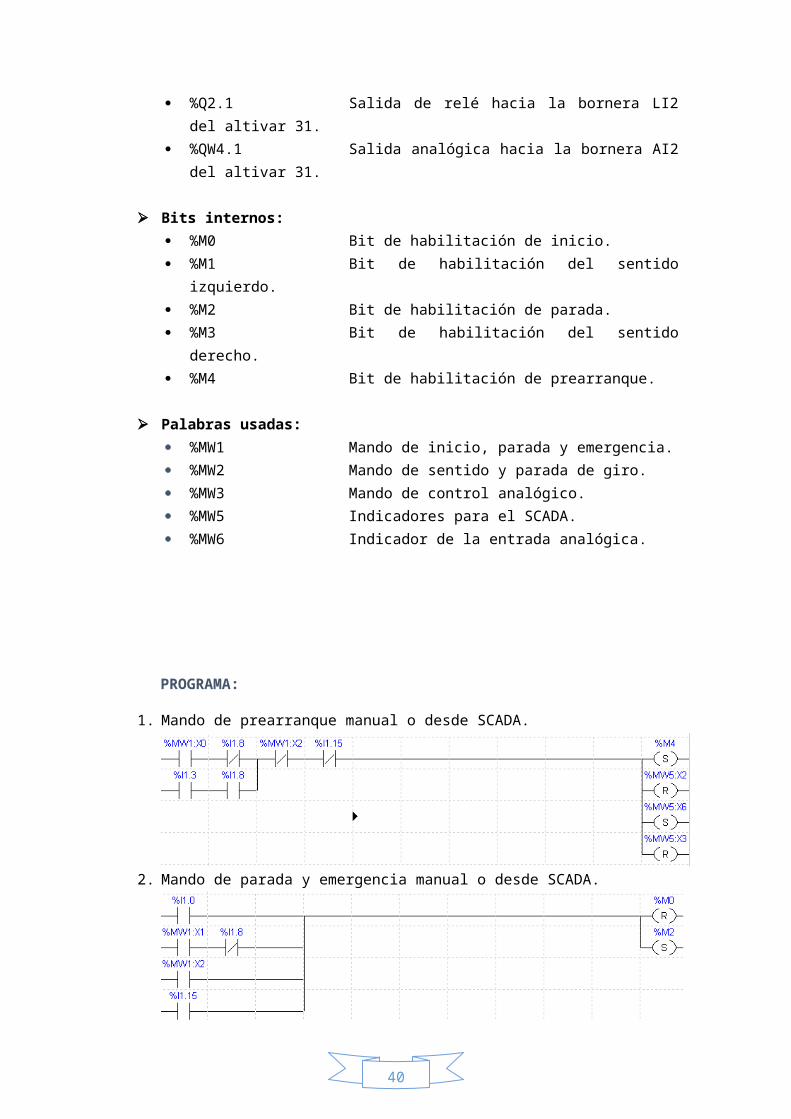
PROGRAMA:
1. Mando de prearranque manual o desde SCADA.
2. Mando de parada y emergencia manual o desde SCADA.
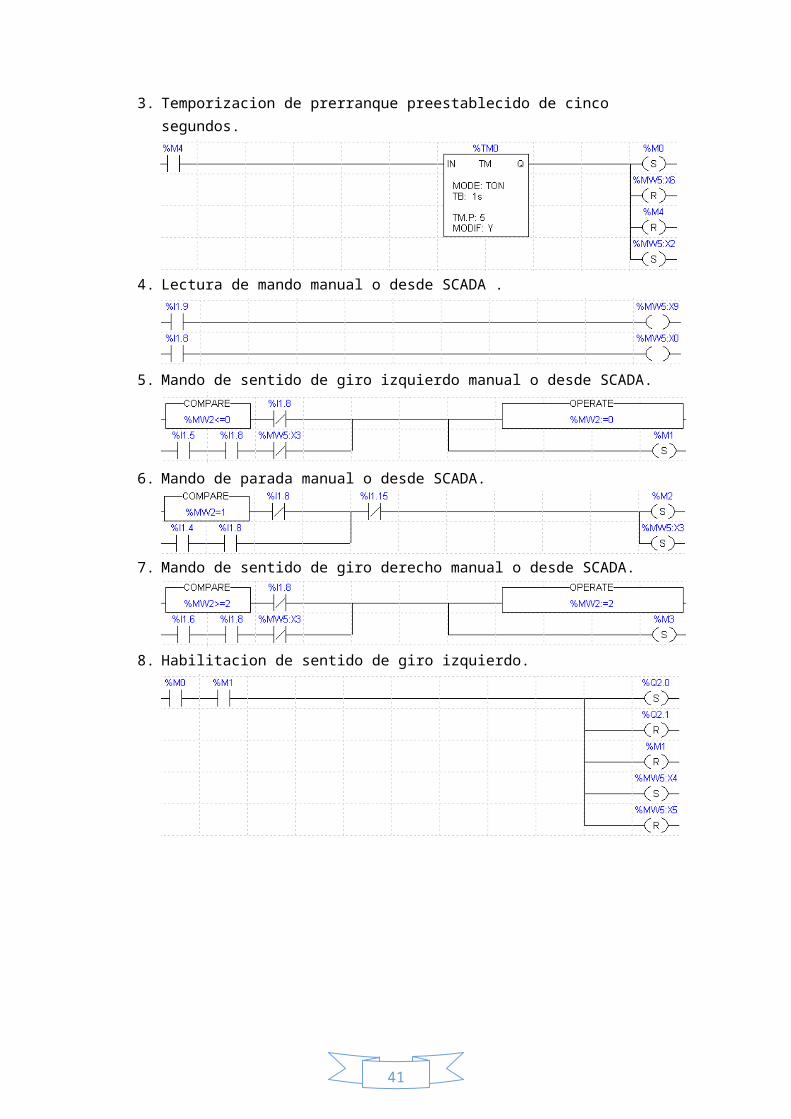
3. Temporizacion de prerranque preestablecido de cinco segundos.
4. Lectura de mando manual o desde SCADA .
5. Mando de sentido de giro izquierdo manual o desde SCADA.
6. Mando de parada manual o desde SCADA.
7. Mando de sentido de giro derecho manual o desde SCADA.
37
8. Habilitacion de sentido de giro izquierdo.
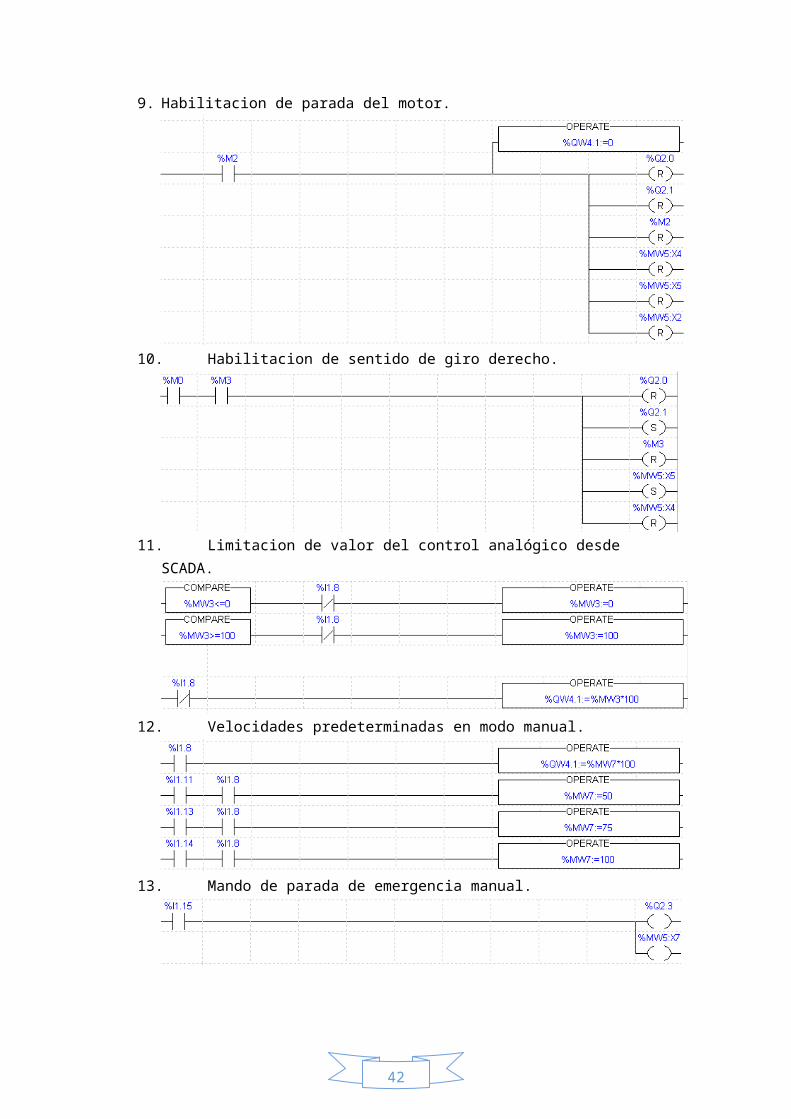
9. Habilitacion de parada del motor.
10. Habilitacion de sentido de giro derecho.
11. Limitacion de valor del control analógico desde SCADA.
38
12. Velocidades predeterminadas en modo manual.
13. Mando de parada de emergencia manual.
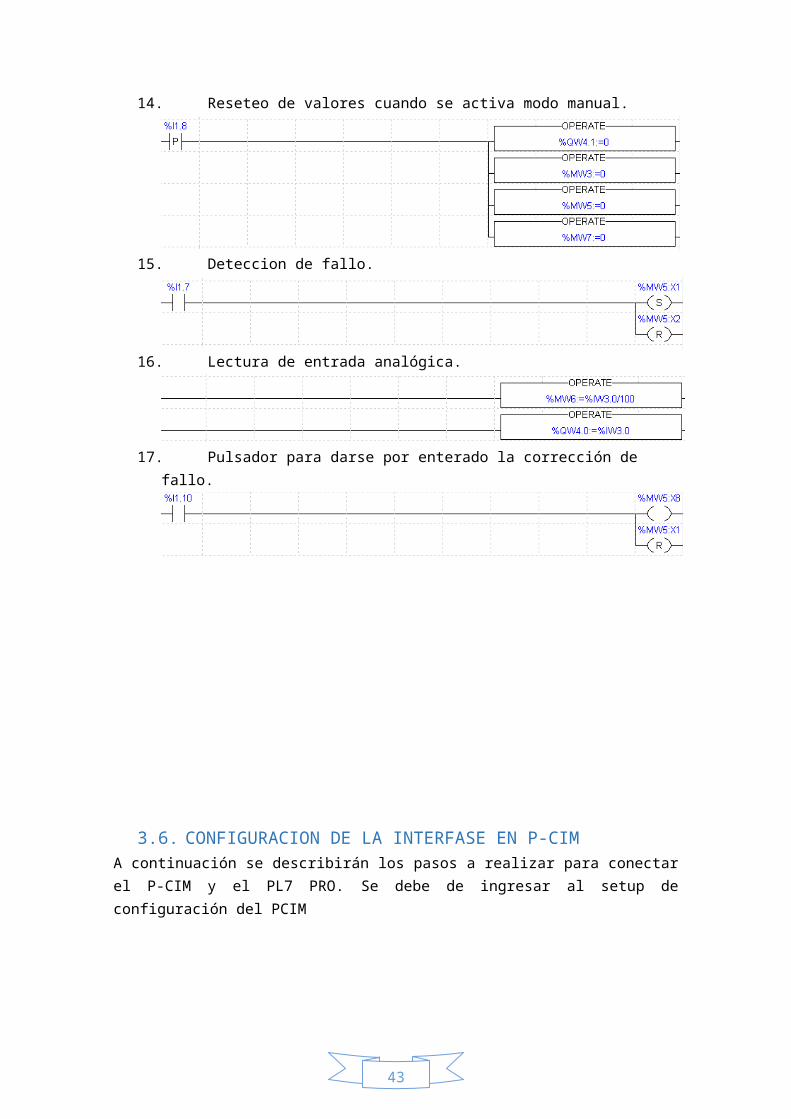
14. Reseteo de valores cuando se activa modo manual.
15. Deteccion de fallo.
16. Lectura de entrada analógica.
17. Pulsador para darse por enterado la corrección de fallo.
39
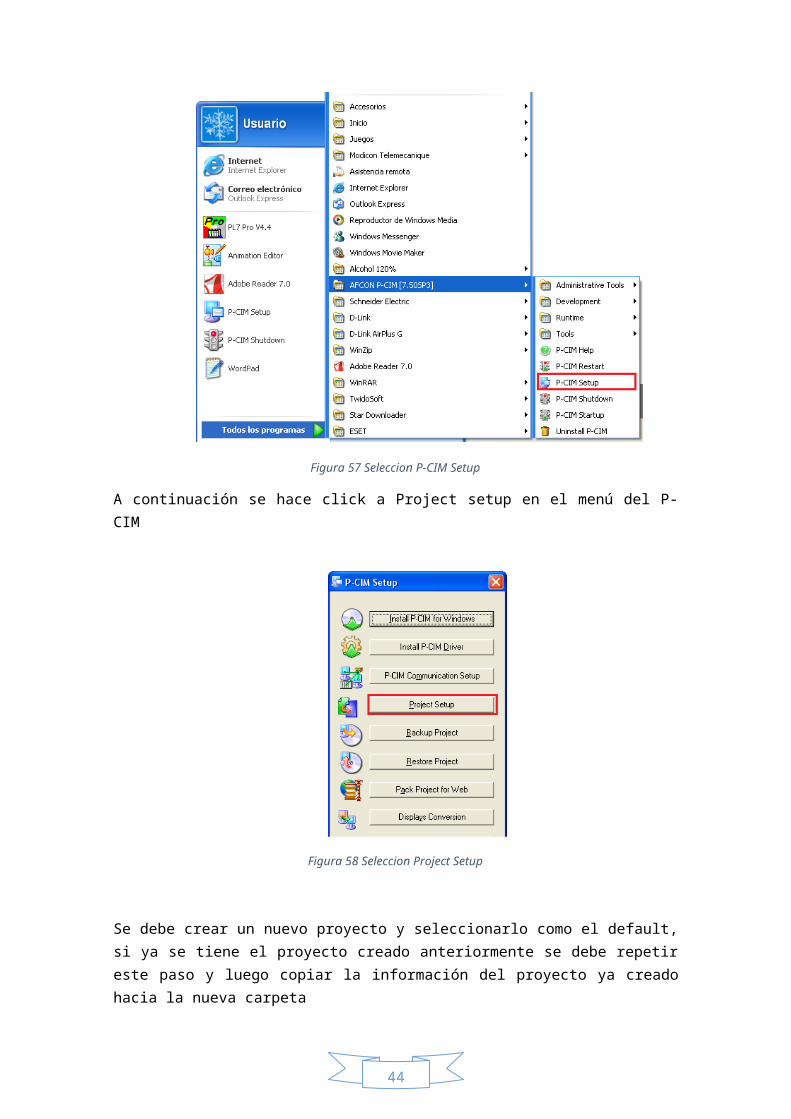
3.6. CONFIGURACION DE LA INTERFASE EN P-CIMA continuación se describirán los pasos a realizar para conectar el P-CIM y el PL7 PRO. Se debe de ingresar al setup de configuración del PCIM
Figura 57 Seleccion P-CIM Setup
A continuación se hace click a Project setup en el menú del P-CIM
Figura 58 Seleccion Project Setup
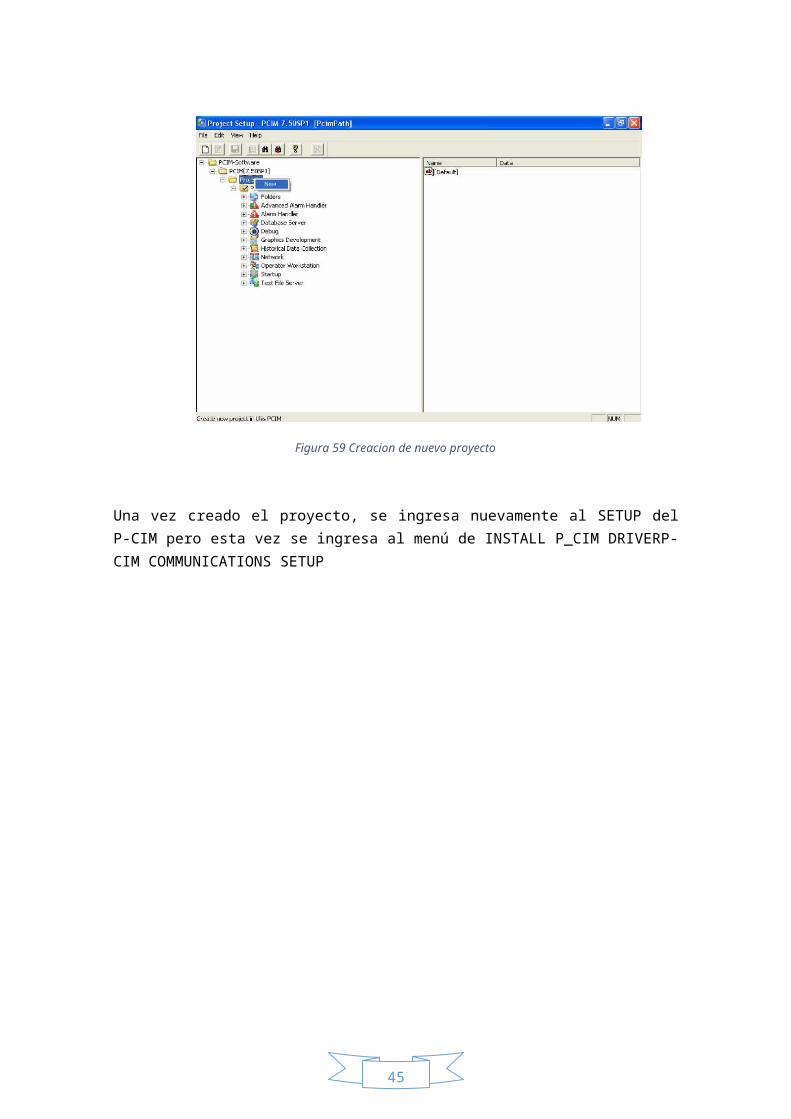
Se debe crear un nuevo proyecto y seleccionarlo como el default, si ya se tiene el proyecto creado anteriormente se debe repetir este paso y luego copiar la información del proyecto ya creado hacia la nueva carpeta
40
Figura 59 Creacion de nuevo proyecto
Una vez creado el proyecto, se ingresa nuevamente al SETUP del P-CIM pero esta vez se ingresa al menú de INSTALL P_CIM DRIVERP-CIM COMMUNICATIONS SETUP
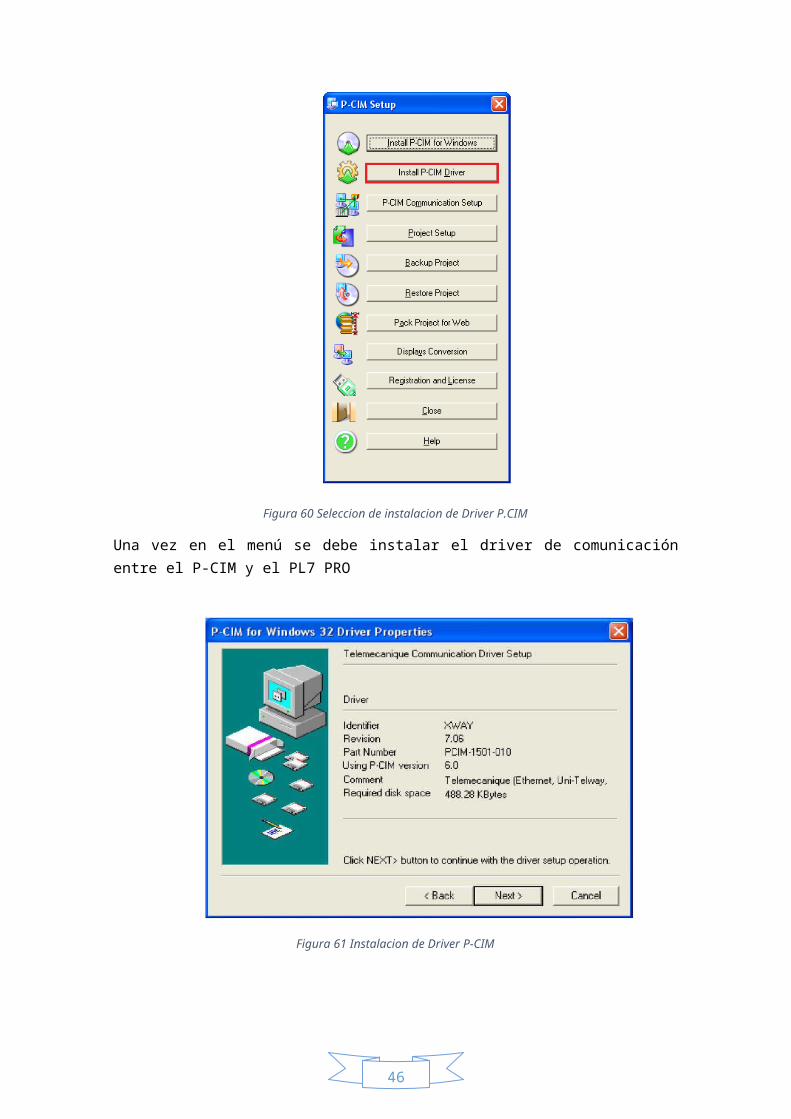
Figura 60 Seleccion de instalacion de Driver P.CIM
41
Una vez en el menú se debe instalar el driver de comunicación entre el P-CIM y el PL7 PRO
Figura 61 Instalacion de Driver P-CIM
Una vez se siguen los pasos de instalación se debe seleccionar el proyecto que hayamos creador, lo demás es solo esperar que el programa termine la instalación.
Una vez instalado el driver, se ingresa nuevamente al SETUP del P-CIM pero esta vez se ingresa al menú de P-CIM COMMUNICATIONS SETUP
Figura 62 Seleccion de comunicacion P-CIM
42
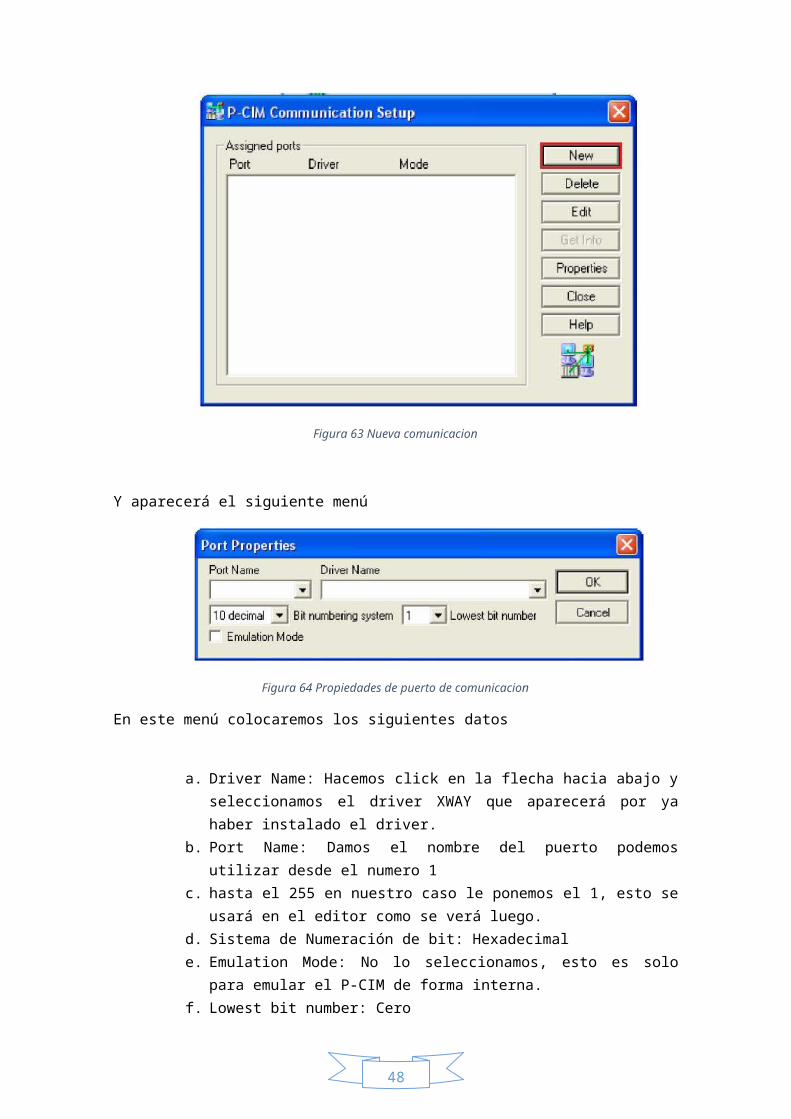
Una vez en el menú, hacemos click en NEW
Figura 63 Nueva comunicacion
Y aparecerá el siguiente menú
Figura 64 Propiedades de puerto de comunicacion
En este menú colocaremos los siguientes datos
a. Driver Name: Hacemos click en la flecha hacia abajo y seleccionamos el driver XWAY que aparecerá por ya haber instalado el driver.
b. Port Name: Damos el nombre del puerto podemos utilizar desde el numero 1c. hasta el 255 en nuestro caso le ponemos el 1, esto se usará en el editor como
se verá luego.d. Sistema de Numeración de bit: Hexadecimale. Emulation Mode: No lo seleccionamos, esto es solo para emular el P-CIM de
forma interna.f. Lowest bit number: Cero
43
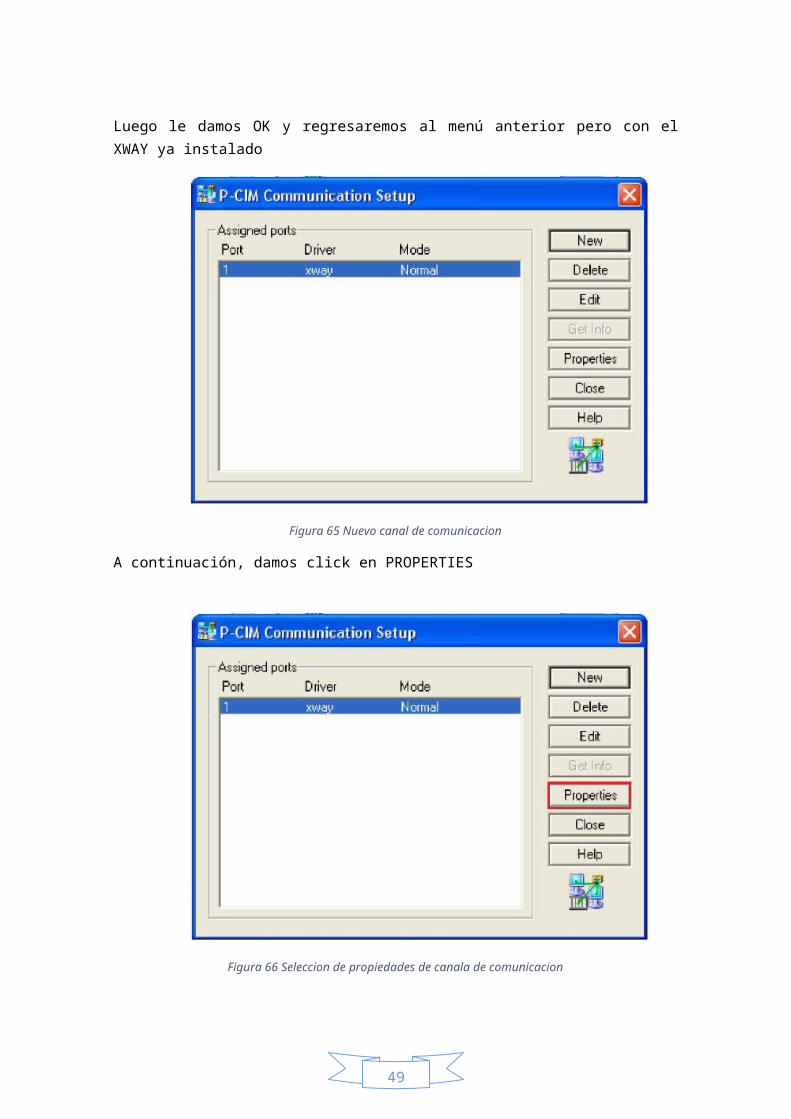
Luego le damos OK y regresaremos al menú anterior pero con el XWAY ya instalado
Figura 65 Nuevo canal de comunicacion
A continuación, damos click en PROPERTIES
Figura 66 Seleccion de propiedades de canala de comunicacion
44
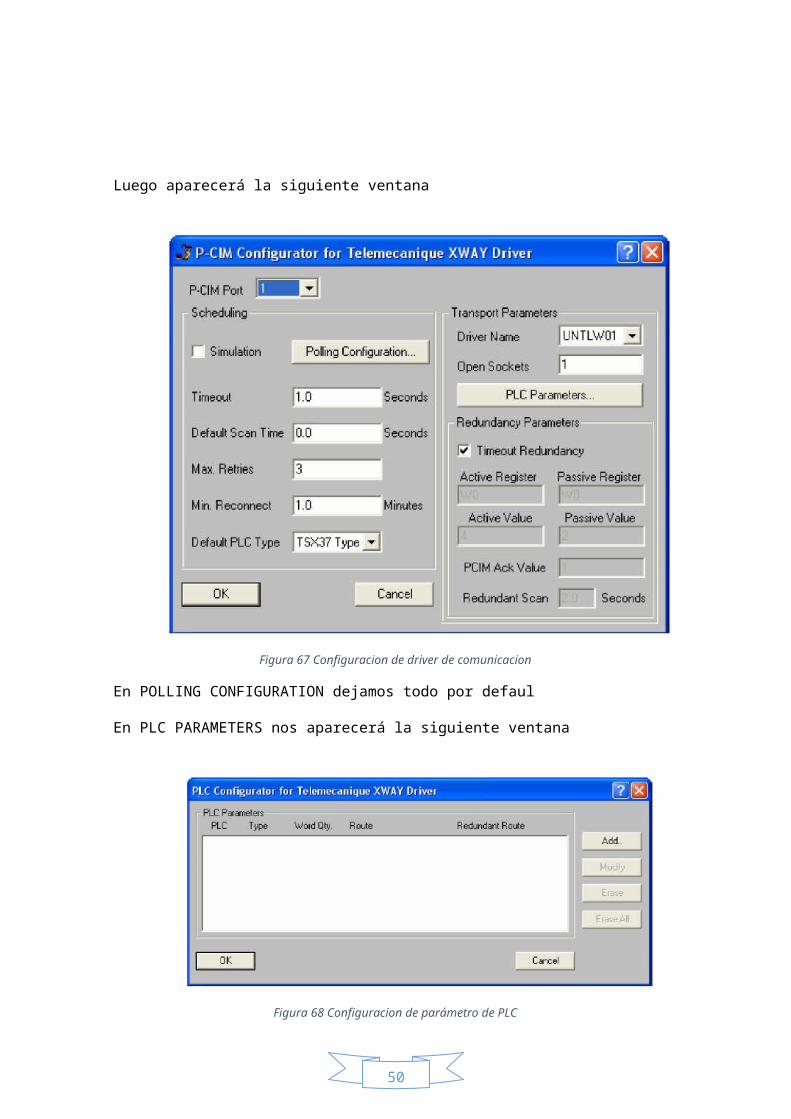
Luego aparecerá la siguiente ventana
Figura 67 Configuracion de driver de comunicacion
En POLLING CONFIGURATION dejamos todo por defaul
En PLC PARAMETERS nos aparecerá la siguiente ventana
Figura 68 Configuracion de parámetro de PLC
45
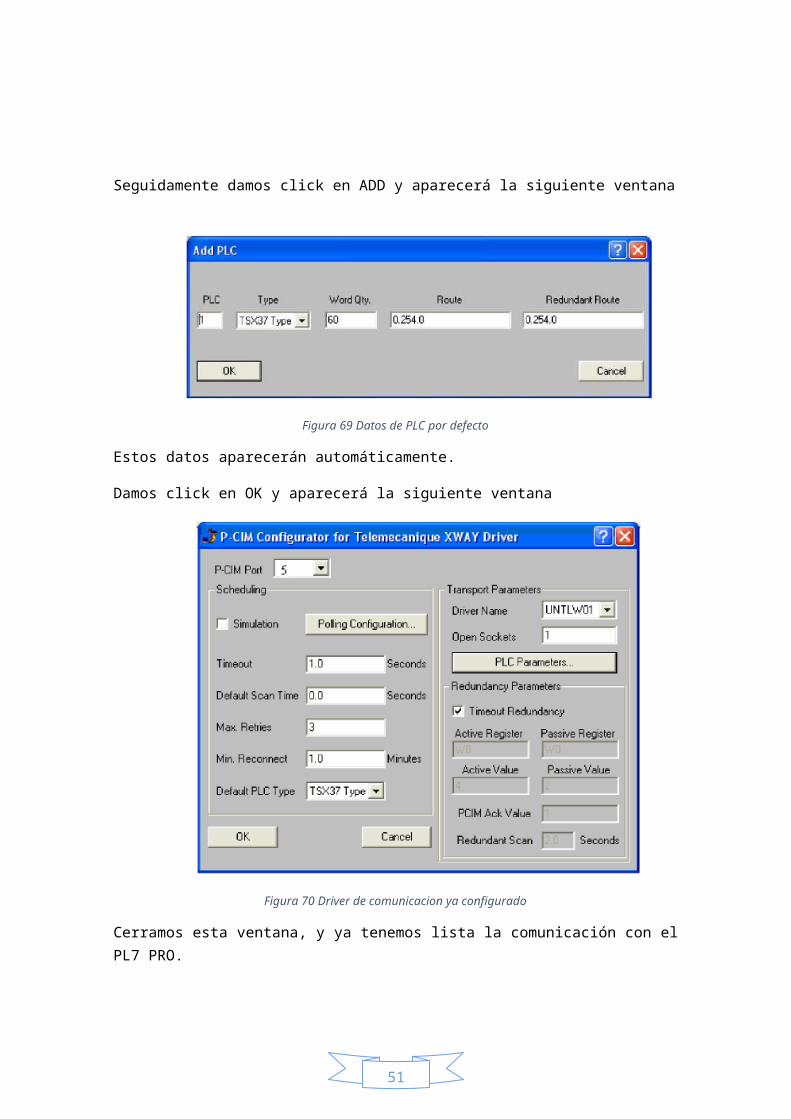
Seguidamente damos click en ADD y aparecerá la siguiente ventana
Figura 69 Datos de PLC por defecto
Estos datos aparecerán automáticamente.
Damos click en OK y aparecerá la siguiente ventana
Figura 70 Driver de comunicacion ya configurado
Cerramos esta ventana, y ya tenemos lista la comunicación con el PL7 PRO.
46
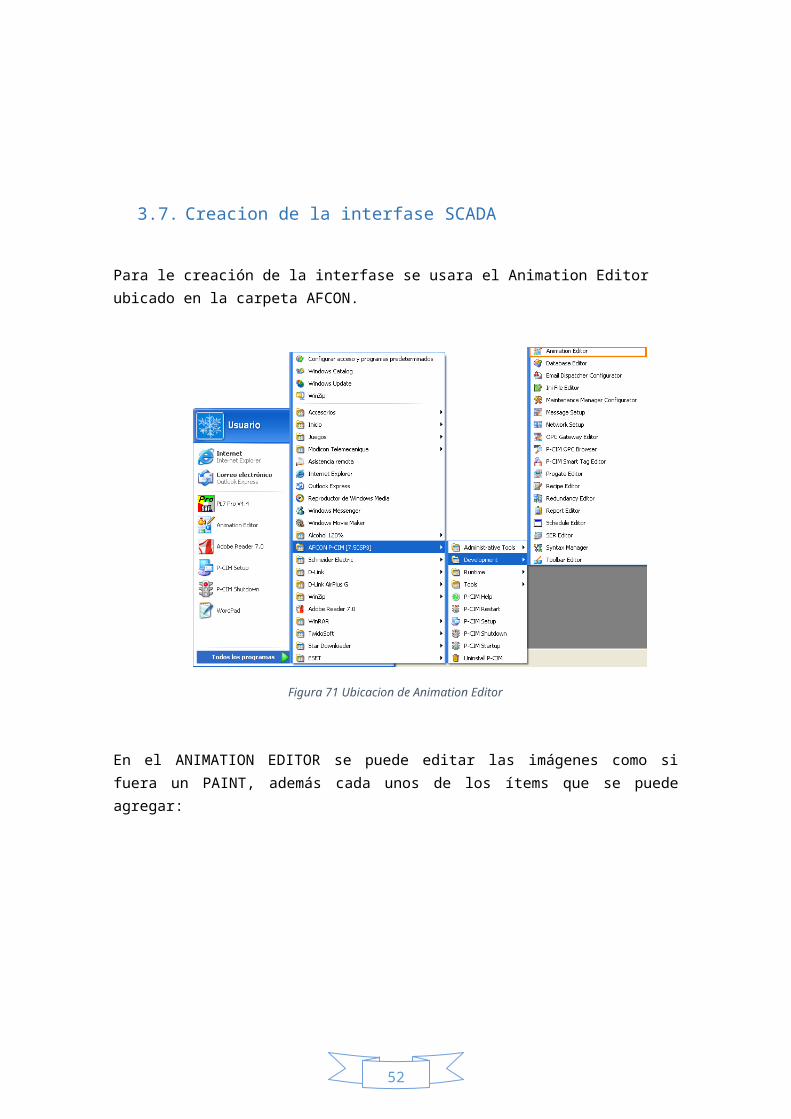
3.7. Creacion de la interfase SCADA
Para le creación de la interfase se usara el Animation Editor ubicado en la carpeta AFCON.
Figura 71 Ubicacion de Animation Editor
En el ANIMATION EDITOR se puede editar las imágenes como si fuera un PAINT, además cada unos de los ítems que se puede agregar:
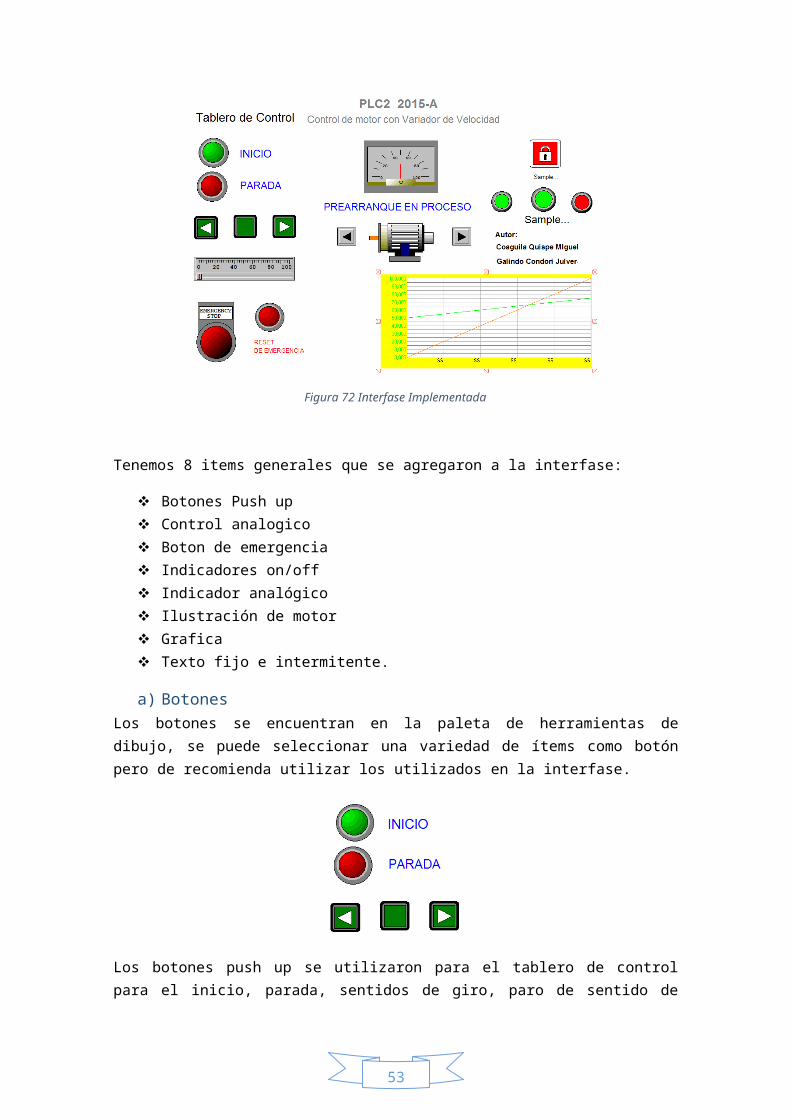
Figura 72 Interfase Implementada

47
Tenemos 8 items generales que se agregaron a la interfase:
Botones Push up Control analogico Boton de emergencia Indicadores on/off Indicador analógico Ilustración de motor Grafica Texto fijo e intermitente.
a) BotonesLos botones se encuentran en la paleta de herramientas de dibujo, se puede seleccionar una variedad de ítems como botón pero de recomienda utilizar los utilizados en la interfase.
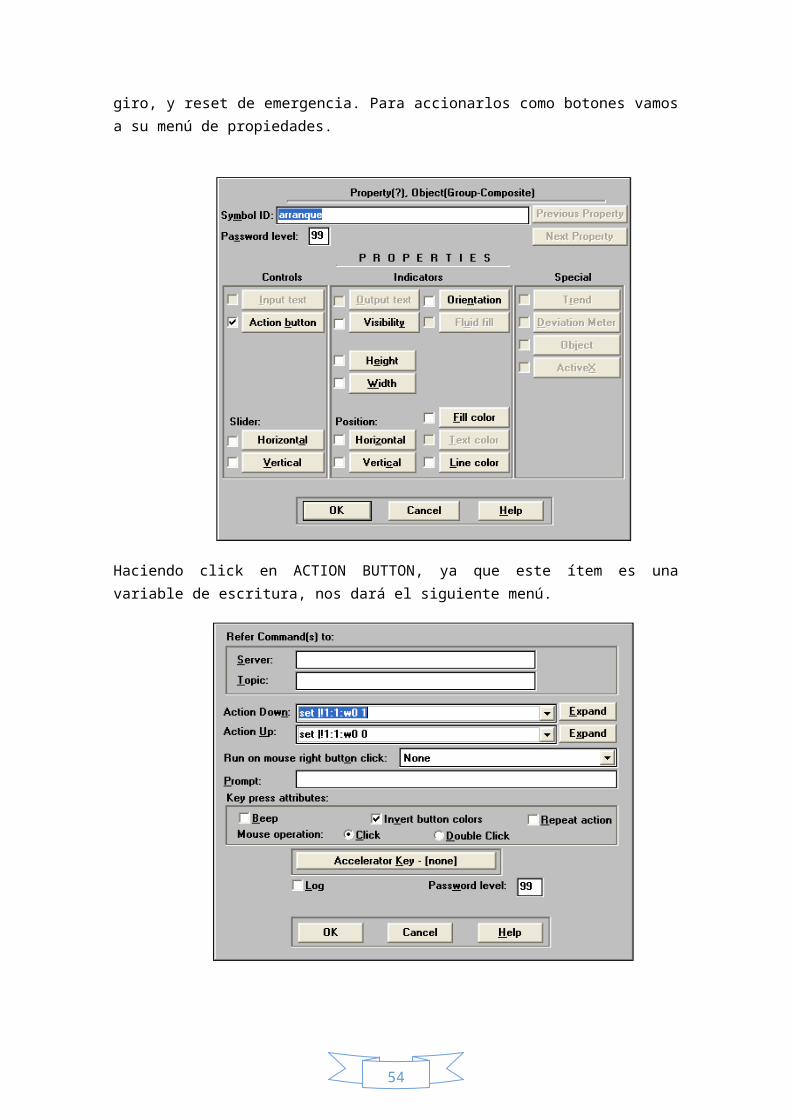
Los botones push up se utilizaron para el tablero de control para el inicio, parada, sentidos de giro, paro de sentido de giro, y reset de emergencia. Para accionarlos como botones vamos a su menú de propiedades.
48
Haciendo click en ACTION BUTTON, ya que este ítem es una variable de escritura, nos dará el siguiente menú.
Donde ACTION DOWN y ACTION UP serán las acciones a realizar cuando el boton vaya de abajo hacia arriba.
i. ACTION DOWN
set |!1:1:w0:0 1Esto quiere decir que cuando el botón vaya hacia abajo la palabra 0 (w0) cambiara a 1.
ii. ACTION UP
set |!1:1:w0:0 0Esto quiere decir que cuando el botón vaya hacia arriba nuevamente la palabra 0 (w0) regresará a 0.
Se debe cambiar las direcciones de bits asignadas a cada botón de acuerdo a los siguientes datos
Inicio : set |!1:1:w0:0
Parada : set |!1:1:w0:1
Sentido izquierdo : set |!1:1:w0:2
Parada de giro : set |!1:1:w0:3
Sentido derecho : set |!1:1:w0:4
49
Reset de emergencia : set |!1:1:w0:5
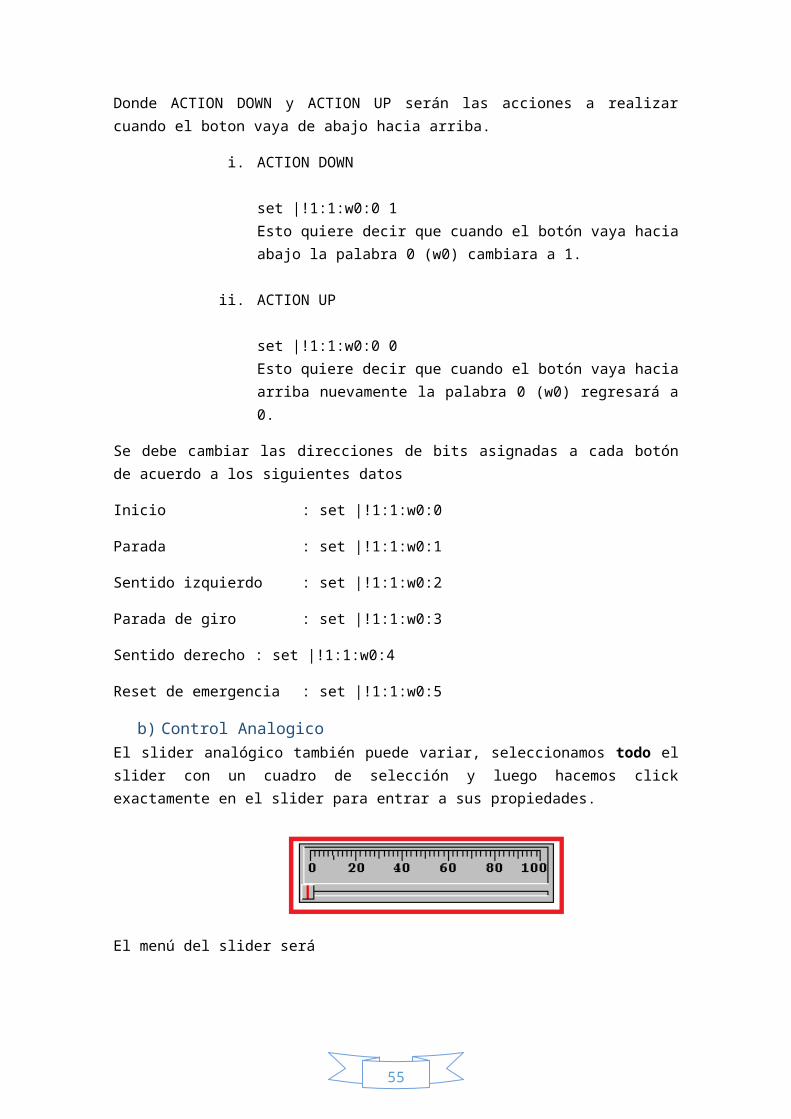
b) Control AnalogicoEl slider analógico también puede variar, seleccionamos todo el slider con un cuadro de selección y luego hacemos click exactamente en el slider para entrar a sus propiedades.
El menú del slider será
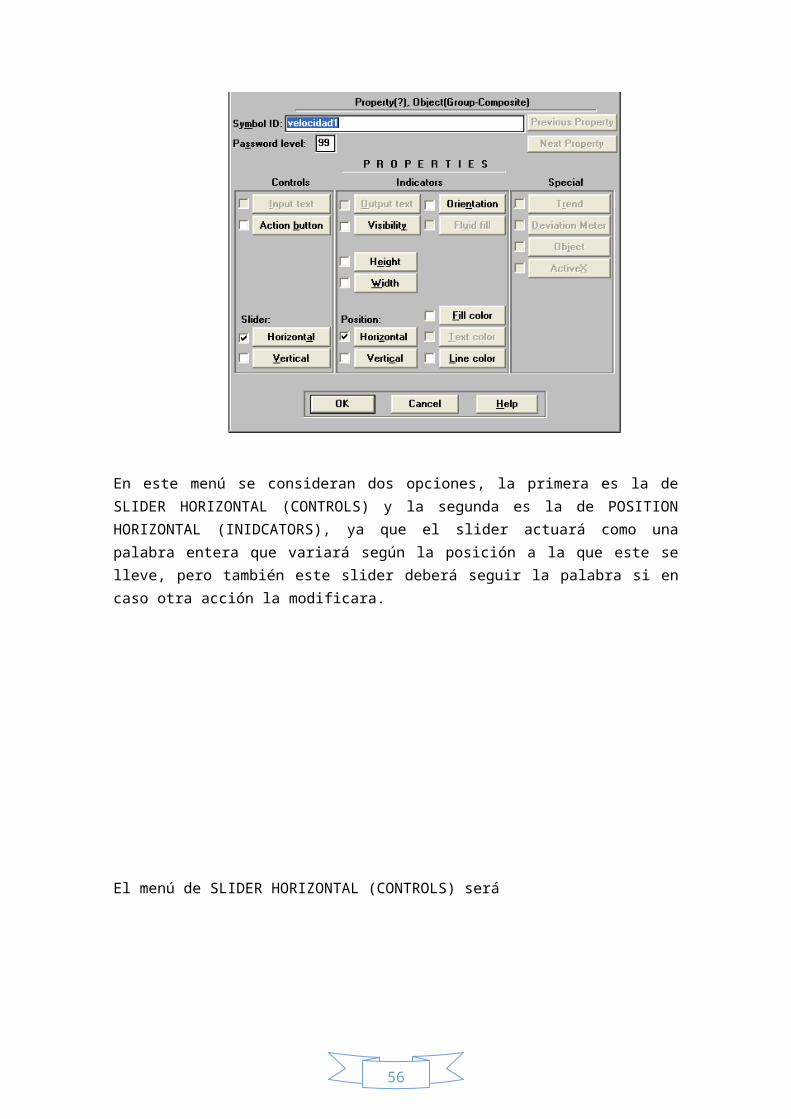
En este menú se consideran dos opciones, la primera es la de SLIDER HORIZONTAL (CONTROLS) y la segunda es la de POSITION HORIZONTAL (INIDCATORS), ya que el slider actuará como una palabra entera que variará según la posición a la que este se lleve, pero también este slider deberá seguir la palabra si en caso otra acción la modificara.
50
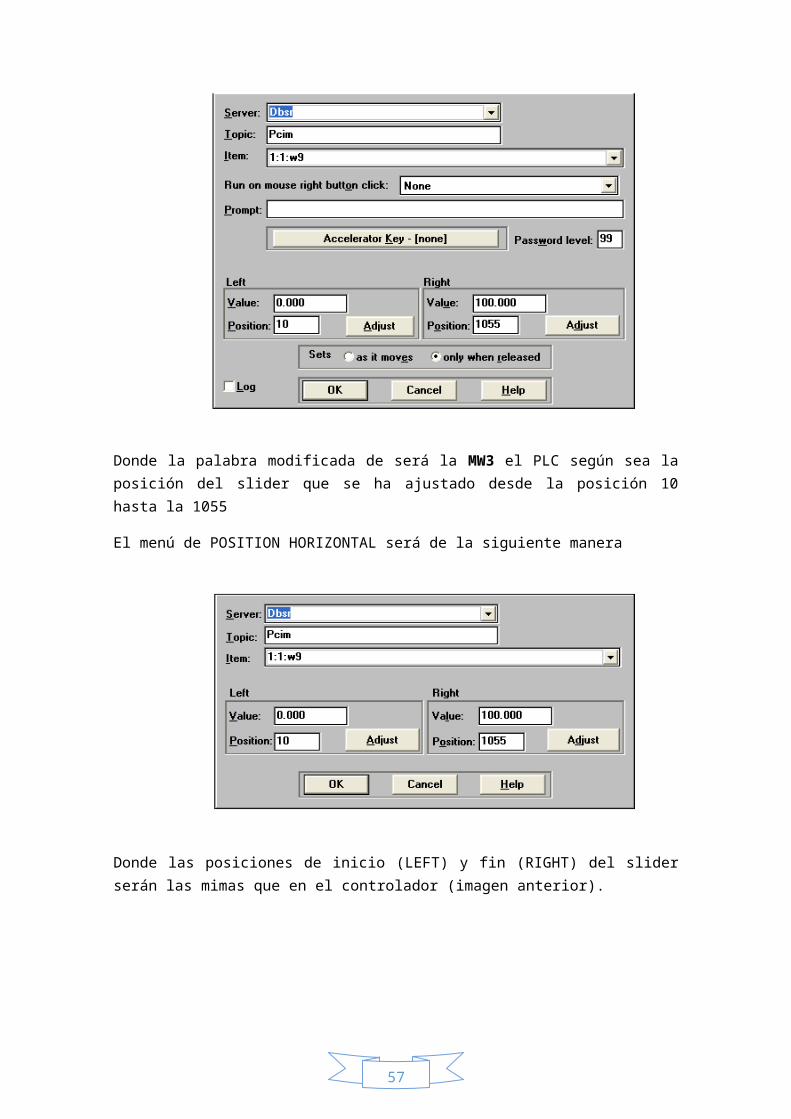
El menú de SLIDER HORIZONTAL (CONTROLS) será
Donde la palabra modificada de será la MW3 el PLC según sea la posición del slider que se ha ajustado desde la posición 10 hasta la 1055
El menú de POSITION HORIZONTAL será de la siguiente manera
Donde las posiciones de inicio (LEFT) y fin (RIGHT) del slider serán las mimas que en el controlador (imagen anterior).
51
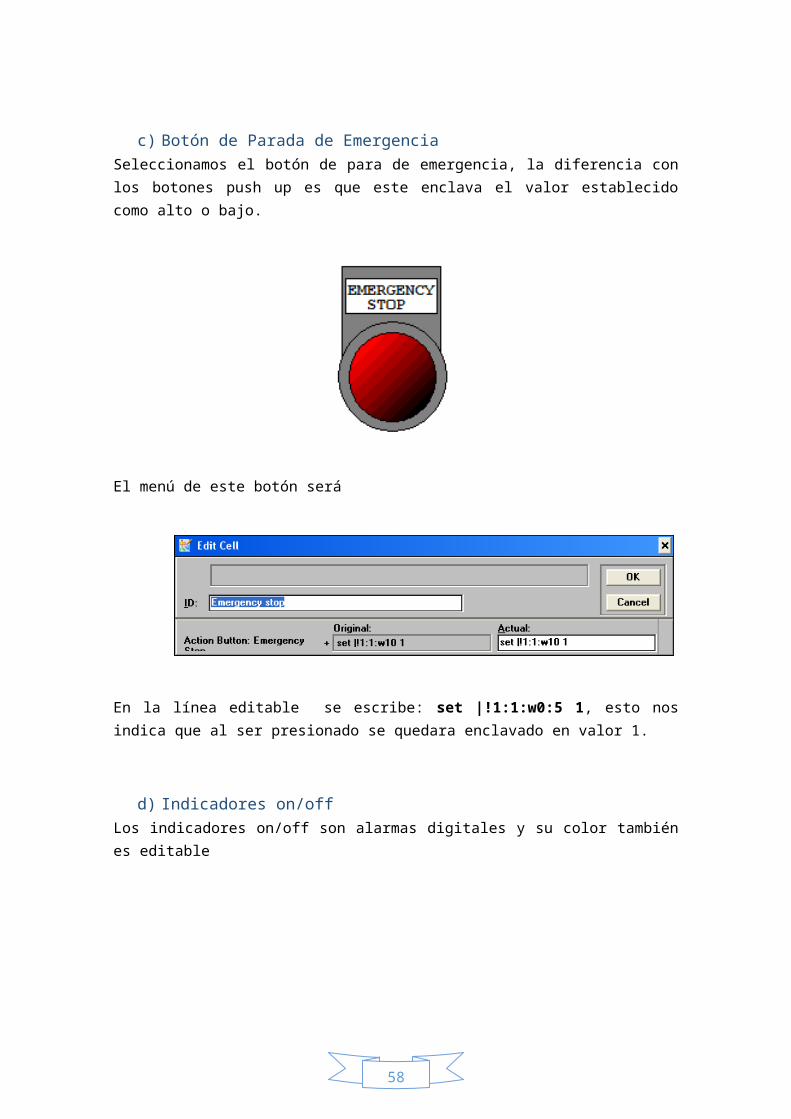
c) Botón de Parada de EmergenciaSeleccionamos el botón de para de emergencia, la diferencia con los botones push up es que este enclava el valor establecido como alto o bajo.
El menú de este botón será
En la línea editable se escribe: set |!1:1:w0:5 1, esto nos indica que al ser presionado se quedara enclavado en valor 1.
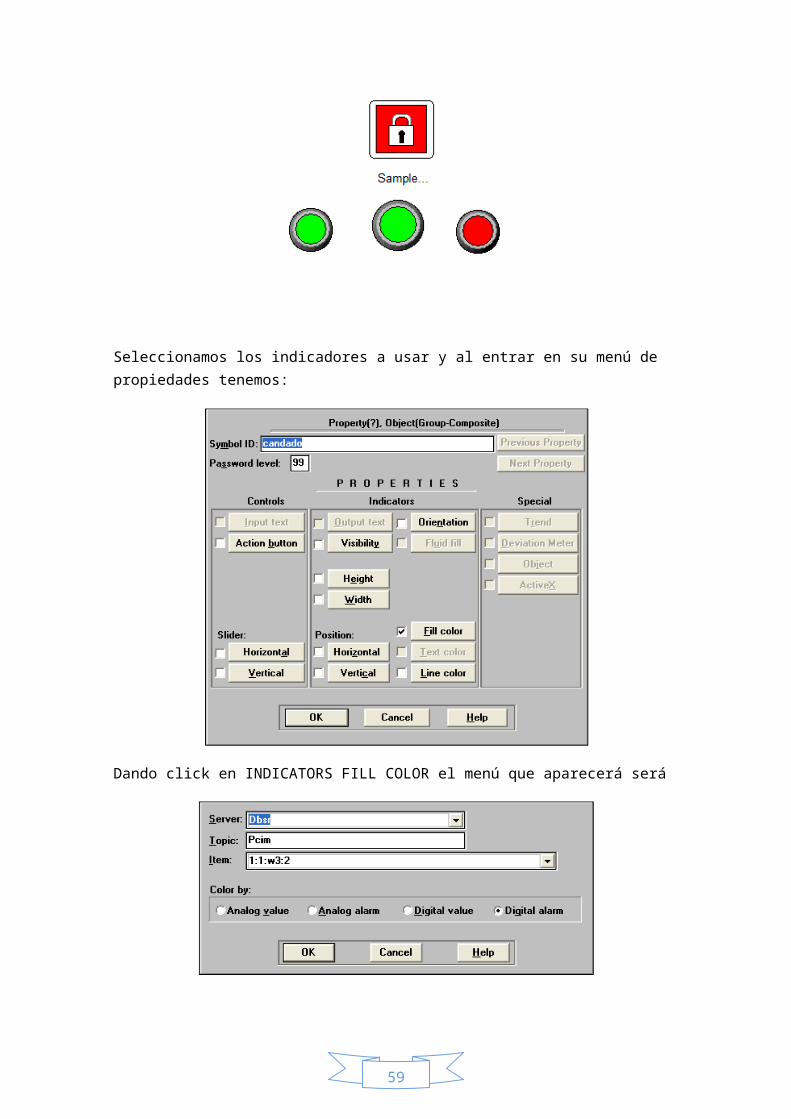
d) Indicadores on/offLos indicadores on/off son alarmas digitales y su color también es editable
52
Seleccionamos los indicadores a usar y al entrar en su menú de propiedades tenemos:
Dando click en INDICATORS FILL COLOR el menú que aparecerá será
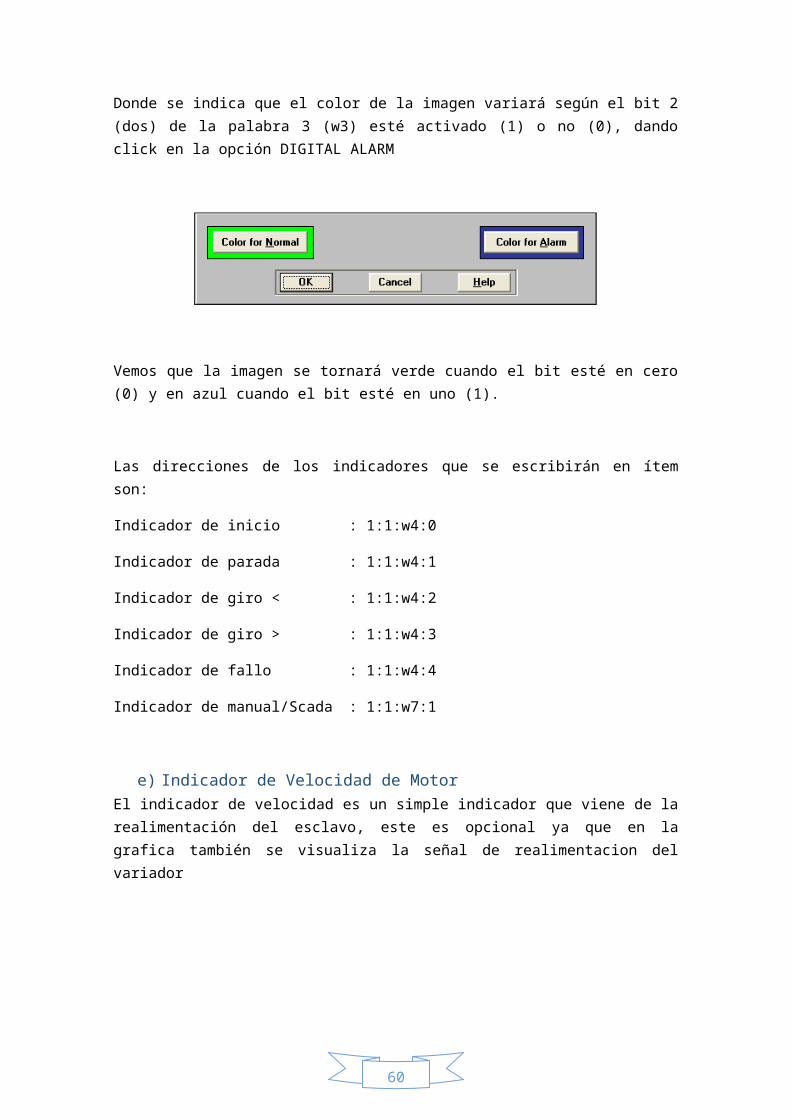
Donde se indica que el color de la imagen variará según el bit 2 (dos) de la palabra 3 (w3) esté activado (1) o no (0), dando click en la opción DIGITAL ALARM
Vemos que la imagen se tornará verde cuando el bit esté en cero (0) y en azul cuando el bit esté en uno (1).
53
Las direcciones de los indicadores que se escribirán en ítem son:
Indicador de inicio : 1:1:w4:0
Indicador de parada : 1:1:w4:1
Indicador de giro < : 1:1:w4:2
Indicador de giro > : 1:1:w4:3
Indicador de fallo : 1:1:w4:4
Indicador de manual/Scada : 1:1:w7:1
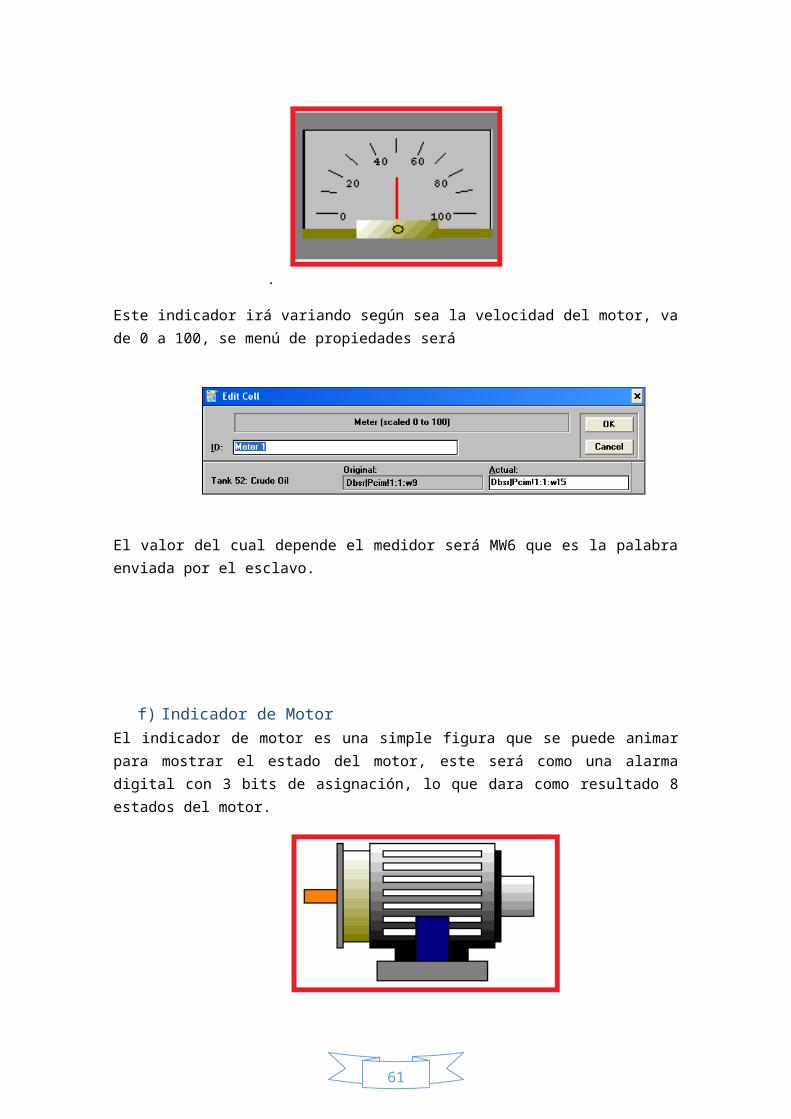
e) Indicador de Velocidad de MotorEl indicador de velocidad es un simple indicador que viene de la realimentación del esclavo, este es opcional ya que en la grafica también se visualiza la señal de realimentacion del variador
.
Este indicador irá variando según sea la velocidad del motor, va de 0 a 100, se menú de propiedades será
El valor del cual depende el medidor será MW6 que es la palabra enviada por el esclavo.
54
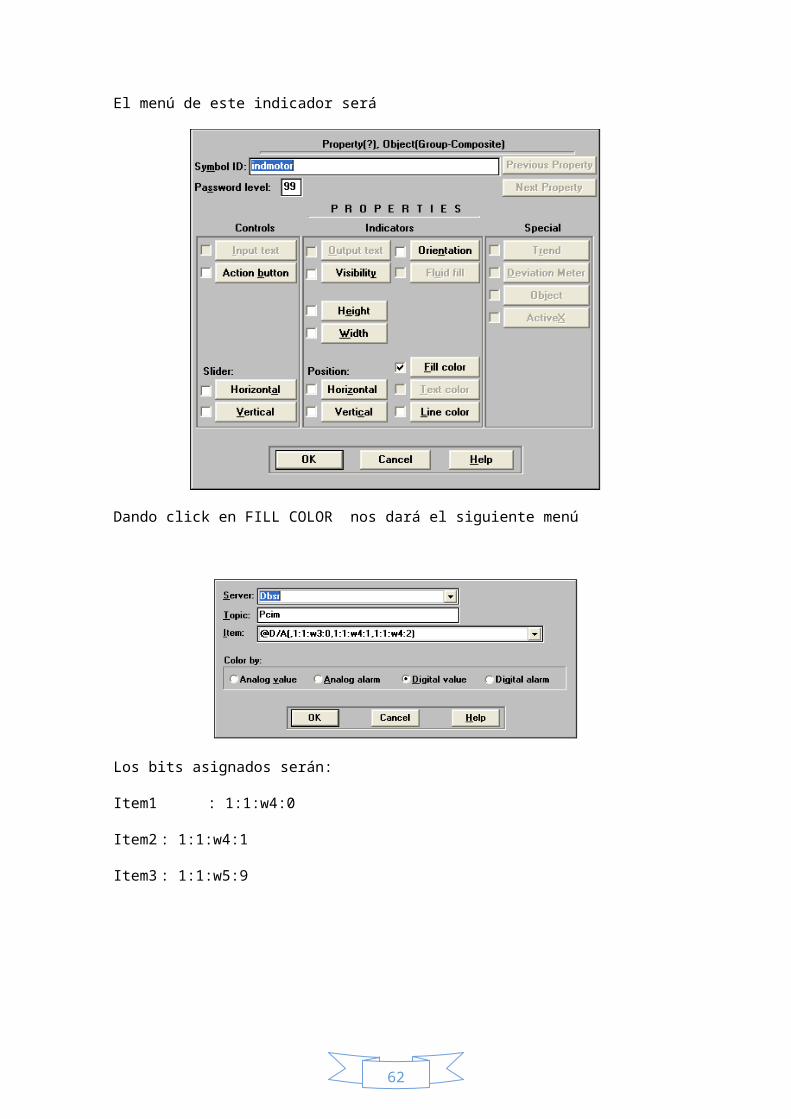
f) Indicador de MotorEl indicador de motor es una simple figura que se puede animar para mostrar el estado del motor, este será como una alarma digital con 3 bits de asignación, lo que dara como resultado 8 estados del motor.
El menú de este indicador será
Dando click en FILL COLOR nos dará el siguiente menú
55
Los bits asignados serán:
Item1 : 1:1:w4:0
Item2 : 1:1:w4:1
Item3 : 1:1:w5:9
g) Indicador de graficaLa grafica se asigna creando un recuadro y haciendo click en sus propiedades seleccionamos trend.
Dentro del menú trend, buscamos el eje “Y” y escribimos las palabras que se visualizaran:
1:1:w3
1:1:w6
56
h) Indicadores de textoLos indicadores de texto pueden funcionar como los indicadores on/off, adicionalmente se utilizara el indicador de visibilidad y aumentar una intermitencia o blinkeo para indicar fallo o prearranque de motor. La asginacion de bits es igual a la de asigancion de indicadores on/off.
La interfase final queda de la siguiente forma:
57
3.8. CONFIGURACION ATV31Se seguirá los siguientes pasos para la configuración del altivar y sea adecuado para el proyecto a implementar:
3.8.1. CONFIGURACION A FABRICAPara volver a configuración de fabrica seguimos los siguientes pasos:
Presionamos ENTER en el altivar. Bajamos y seleccionamos el menú I_O Luego buscamos el comando FCS Dentro de este buscamos el comando lnl y lo presionamos por 2 segundos. Se verifica que ya esta en modo fabrica cuando parpadea.
Para poner una frecuencia máxima de 60 Hz en la velocidad se procede de la siguiente manera:
Buscamos el menú drC. Buscamos el parámetro bFr. Seleccionamos 60Hz. Presionamos enter. Retrocedemos al menú drC. Buscamos el parámetro tFr. Bajamos el valor a 60. Presionamos enter.
3.8.2. CONFIGURACION A DOS HILOSEl programa ladder esta configurado para que el altivar 31 funcione a dos hilos, el altivar esta configurado en modo local; es decir que funciona con los botones que ya tiene el variador.
Para cambiarlo a modo 2 hilos se procede de la siguiente forma:
Presionamos enter Bajamos y buscamos el menú I_O Buscamos el parámetro tcc Buscamos 2C, presionamos por 2 segundos hasta que parpadee y verificamos que esta
en dos hilos.
La configuración a dos hilos tiene por defecto:
LI1: Giro izquierda
58
LI2: Giro Derecha
LI3: Velocidad predeterminada 1
LI4: Velocidad predeterminada 2
AI1: Entrada analógica no establecida
AI2: Entrada analógica de 0 a 10 V.
3.8.3.CONFIGURACION DE RELE DE FALLOPara simular un fallo de motor configuraremos que llegada la frecuencia de 55Hz se active un rele programable y este vaya a la entrada de simulación de fallo del PLC micro:
Presionamos enter. Buscamos el menú Set. Buscamos el parámetro Ftd. Cambiamos el valor a 55. Presionamos enter. Retrocedemos y buscamos el menú i-O Buscamos el parametro r2 Presionamos enter y dentro del menu seleccionamos el parámetro FtA Presionamos enter
3.8.4.CONFIGURACION DE LA SALIDA ANALOGICALa salida analógica corresponde a la bornera de AOV y AOC, en la cual tenemos salida de tensión de 0 a 10v en AOV y salida de correinte de 0a 20mA o 4 a 20mA en AOC. Para el proyecto se utilizo salida de 0 a 10V y su configuración es de l siguiente manera:
Preisonamos enter Buscamos el menú I-O Buscamos el parámetro AOIt Seleccionamos 10U Presionamos enter Retrocedemos al menú I-O Buscamos el parámetro d0 Seleccionamos el parámetro Ofr (frecuencia del motor) Presionamos enter.
59
3.9. MOTOR TRIFASICOEl motor trifásico ha usar es un motor de inducción de 3 fases con una potencia de 0.55kW en configuración de bajo voltaje y triangulo.
Los datos del motor se muestran en la siguiente imagen:
El motor trifásico asíncrono a usar es el que esta en el laboratorio de control.
60
4. IMPLEMENTACIONLa implementación se desarrollo con los materiales del laboratorio de instrumentación. Ademas de unos cables con conectores tipo punta debido a las borneras del PLC Micro.
El conexionado de los PLC se realizo mediante los protocolos ya mencionados y en el orden del diagrama de bloques.
La conexión del Altivar31 al PLC Premium va en la siguiente figura:
Para iniciar la interfase Scada primero debemos poner el proyecto creado como default que ya es explico en la creación del a interfase.
Luego cargar los programas ladder y configuraciones predeterminadas de cada PLC y correrlos en RUN.
Una vez hecho esto arrancamos la interfase en el PC del PLC Premium de la siguiente manera:
Abrimos inicio Buscamos el icono PCIM Start up Luego buscamos el icono Operator Workstation Si n ose carga atuomaticamente seleccionamos en el menú files, open y luego
buscamos la interfase con el nombre guardado en animation editor.
61
NOTAS:
Si hay problemas con alguno de los equipo se recomienda reiniciar los PLC desconectando la alimentación de estos.
Si aparece los errores de nacks es porque se esta sobrecargando al ítem o bit asignado, se recomienda plantear un algoritmo diferente para el ítem.
5. CONCLUSIONES El protocolo de comunicación modbus tiene la característica de ser maestro esclavo. Un software de interfase SCADA funciona en tiempo real, pero este tiempo esta
determinado por las iteraciones de poleo programadas en los PLCs. Es necesario la instalación de drivers de comunicación correspondientes al PLC, que es
independiente del programa Ladder para crear un nuevo proyecto. La rampa de aceleración y desaceleración para el motor trifásico viene determinado
por el variador de velocidad. Esta también es configurable mediante el variador. Es importante la verificación de las conexiones para evitar accidentes y cortos circuitos
que dañen los equipos. Es recomendable usar dos bits de lectura en el micro para una sola entrada digital solo
si esta se usa en varias lineas de programación.
62
6. BIBLIOGRAFIA http://www.schneider-electric.com.ar/sites/argentina/es/productos-servicios/
formacion/automatizacion/scada-pcim1.page http://200.57.159.226/toolkits/atv31/conception/characteristics/index.htm http://www.schneider-electric.cn/downloads//85257689000007ee/all/
dbcf032ce5eafa938525789b005e056d/$file/35003084-en.pdf
http://download.gongkong.com/file/company/8/5.pdf http://ewon.be/Download/AN/An09-premium-uk.pdf http://isa.uniovi.es/~vsuarez/Download/ConfiguracionOFSSWinCC.pdf http://download.schneider-electric.com/files?
p_File_Id=25609069&p_File_Name=43594-EN-%28web%29.pdf http://www.schneider-electric.com/products/es/es/2400-comunicaciones-
industriales/2410-redes-de-comunicaciones-principales/573-uni-telway/ http://www.exemys.com/beta/espanol/pdf/notas%20tecnicas/
NT18_TSX37_MICRO_S.pdf


















