Cinem´atica de la Part´ıcula Sujeto a Traslaci´on …¡mica I... · cuantificar el movimiento...
36
Cinem´atica de la Part´ ıcula Sujeto a Traslaci´on Curvil´ ınea. Jos´ e Mar´ ıa Rico Mart´ ınez Departamento de Ingenier´ ıaMec´anica Divisi´ondeIngenier´ ıas, Campus Irapuato-Salamanca Universidad de Guanajuato. Salamanca, Gto. 36885, M´ exico June 23, 2014 Abstract En estas notas se analiza la cinem´atica de la part´ ıcula sujeto a traslaci´on curvil´ ınea. En sentido estricto, estas notas debieran considerar primero cuando la trayectoria que describe la part´ ıcula es plana, este caso se conoce como traslaci´oncurvil´ ınea plana y, posteriormente, cuando la trayectoria que describe la part´ ıcula es una curva espacial, este caso se conoce como traslaci´oncurvil´ ınea espacial. Sin embargo, los m´ etodos de an´alisis son tan semejantes, que estas notas tratan el caso de traslaci´on curvil´ ınea espacial y unicamente como un caso especial, se analiza la traslaci´on curvil´ ınea plana. 1 Traslaci´oncurvil´ ınea de una part´ ıcula. Como ya se indic´o en la primera parte de estas notas, a f´ ın de describir el movimiento de una part´ ıcula es necesario emplear sistemas de referencia. Un sistema de referencia es una persona con una regla y un reloj. La regla y el reloj de la persona le permiten —aqu´ ı el lector debe usar la imaginaci´on— observar y cuantificar el movimiento de unao varias part´ ıculas, de manera que si una part´ ıcula arbitraria se denomina P , la persona es capaz de determinar la funci´on vectorial r P , como funci´on del tiempo; es decir, r P = r P (t), (1) donde el vector r P , conocido como vector de posici´on de la part´ ıcula P , va desde un origen predeterminado por la persona, por ejemplo, el centro de su mano, a la part´ ıcula P . Es importante se˜ nalar que un vector es un ente abstracto que no requiere necesariamente escribirse en t´ erminos de sus coordenadas y que la presencia de un sistema de referencia no implica una selecci´on a priori del sistema coordenado que, si es necesario, se va a emplear. Por ejemplo, en el sistema de referencia mostrado en la figura 1, el observador puede hacer uso de coordenadas cartesianas, representadas en rojo por (x, y, z), coordenadas cil´ ındricas, representadas en azul por (φ, r, z), o coordenadas esf´ ericas, representadas en verde por (φ, θ, r). En cuanto al movimiento del sistema de referencia, en esta secci´on emplearemos sistemas de referencia fijos, sistemas de referencia sujetos a movimiento de traslaci´on y de forma un cuanto tanto escondida sistemas de referencia sujetos a movimiento de rotaci´on. Ciertamente empezaremos empleando sistemas de referencia fijos. En una primera etapa, se mostrar´a que la velocidad de la part´ ıcula P puede definirse de manera intr´ ınseca e independiente del sistema coordenado empleando por el sistema de referencia. Posteriormente, se analizar´a la determinaci´on de la velocidad y la aceleraci´on de la part´ ıcula empleando los diferentes sistemas coordenadas. Considere una part´ ıcula P , vea la figura 2, moviendose con respecto a un sistema de referencia, en el cual, a prop´osito, se ha eliminado todo sistema coordenado, con el objeto de enfatizar que la 1
Transcript of Cinem´atica de la Part´ıcula Sujeto a Traslaci´on …¡mica I... · cuantificar el movimiento...
Cinematica de la Partıcula Sujeto a Traslacion Curvilınea.
Jose Marıa Rico Martınez
Departamento de Ingenierıa Mecanica
Division de Ingenierıas, Campus Irapuato-Salamanca
Universidad de Guanajuato.
Salamanca, Gto. 36885, Mexico
June 23, 2014
Abstract
En estas notas se analiza la cinematica de la partıcula sujeto a traslacion curvilınea. En sentido
estricto, estas notas debieran considerar primero cuando la trayectoria que describe la partıcula es plana,
este caso se conoce como traslacion curvilınea plana y, posteriormente, cuando la trayectoria que
describe la partıcula es una curva espacial, este caso se conoce como traslacion curvilınea espacial.
Sin embargo, los metodos de analisis son tan semejantes, que estas notas tratan el caso de traslacion
curvilınea espacial y unicamente como un caso especial, se analiza la traslacion curvilınea plana.
1 Traslacion curvilınea de una partıcula.
Como ya se indico en la primera parte de estas notas, a fın de describir el movimiento de una partıcula esnecesario emplear sistemas de referencia. Un sistema de referencia es una persona con una regla y unreloj. La regla y el reloj de la persona le permiten —aquı el lector debe usar la imaginacion— observar ycuantificar el movimiento de una o varias partıculas, de manera que si una partıcula arbitraria se denominaP , la persona es capaz de determinar la funcion vectorial ~rP , como funcion del tiempo; es decir,
~rP = ~rP (t), (1)
donde el vector ~rP , conocido como vector de posicion de la partıcula P , va desde un origen predeterminadopor la persona, por ejemplo, el centro de su mano, a la partıcula P . Es importante senalar que un vectores un ente abstracto que no requiere necesariamente escribirse en terminos de sus coordenadas y que lapresencia de un sistema de referencia no implica una seleccion a priori del sistema coordenado que, si esnecesario, se va a emplear. Por ejemplo, en el sistema de referencia mostrado en la figura 1, el observadorpuede hacer uso de coordenadas cartesianas, representadas en rojo por (x, y, z), coordenadas cilındricas,representadas en azul por (φ, r, z), o coordenadas esfericas, representadas en verde por (φ, θ, r).
En cuanto al movimiento del sistema de referencia, en esta seccion emplearemos sistemas de referencia
fijos, sistemas de referencia sujetos a movimiento de traslacion y de forma un cuanto tantoescondida sistemas de referencia sujetos a movimiento de rotacion. Ciertamente empezaremosempleando sistemas de referencia fijos.
En una primera etapa, se mostrara que la velocidad de la partıcula P puede definirse de maneraintrınseca e independiente del sistema coordenado empleando por el sistema de referencia. Posteriormente,se analizara la determinacion de la velocidad y la aceleracion de la partıcula empleando los diferentessistemas coordenadas.
Considere una partıcula P , vea la figura 2, moviendose con respecto a un sistema de referencia, enel cual, a proposito, se ha eliminado todo sistema coordenado, con el objeto de enfatizar que la
1

Figure 1: Sistema de Referencia con Tres Posibles Sistemas Coordenados.
determinacion de la velocidad y de la aceleracion es independiente de cualquier seleccion de
un sistema coordenado. Considere dos instantes de tiempo, t y t+∆t junto con los vectores de posicioncorrespondientes para esos tiempos.
La velocidad de la partıcula P se define como
~vP (t) = Lim∆ t→0
~rP (t + ∆t) − ~rP (t)
∆ t= Lim∆ t→0
∆~rP
d t=
d~rP (t)
d t(2)
Figure 2: Determinacion de la Velocidad de una Partıcula Sujeta a Traslacion Curvilınea.
Puesto que para dos tiempos cualesquiera, t, y t + ∆ t, el vector
∆~rP = ~rP (t + ∆t) − ~rP (t),
es secante a la trayectoria de la partıcula, es facil comprender que a medida que ∆ t → 0, el vector ∆~rP yel vector velocidad ~vP (t) se vuelven tangentes a la trayectoria en el punto P . La magnitud delvector velocidad ~vP (t), determinada como,
| ~vP (t) |=√
~vP (t) · ~vP (t), (3)
2
donde · representa el producto escalar del algebra vectorial tridimensional, se conoce como la rapidez dela partıcula y a diferencia de la velocidad, la rapidez es una cantidad escalar.
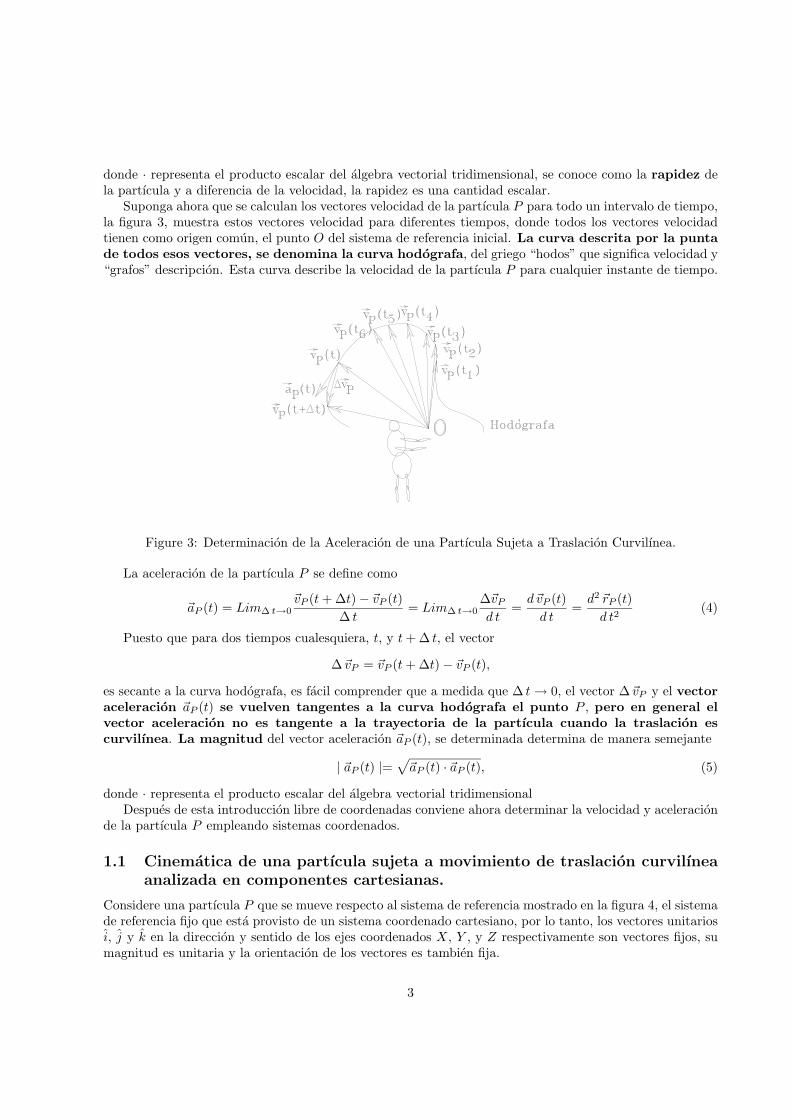
Suponga ahora que se calculan los vectores velocidad de la partıcula P para todo un intervalo de tiempo,la figura 3, muestra estos vectores velocidad para diferentes tiempos, donde todos los vectores velocidadtienen como origen comun, el punto O del sistema de referencia inicial. La curva descrita por la punta
de todos esos vectores, se denomina la curva hodografa, del griego “hodos” que significa velocidad y“grafos” descripcion. Esta curva describe la velocidad de la partıcula P para cualquier instante de tiempo.
Figure 3: Determinacion de la Aceleracion de una Partıcula Sujeta a Traslacion Curvilınea.
La aceleracion de la partıcula P se define como
~aP (t) = Lim∆ t→0
~vP (t + ∆t) − ~vP (t)
∆ t= Lim∆ t→0
∆~vP
d t=
d~vP (t)
d t=
d2 ~rP (t)
d t2(4)
Puesto que para dos tiempos cualesquiera, t, y t + ∆ t, el vector
∆~vP = ~vP (t + ∆t) − ~vP (t),
es secante a la curva hodografa, es facil comprender que a medida que ∆ t → 0, el vector ∆~vP y el vector
aceleracion ~aP (t) se vuelven tangentes a la curva hodografa el punto P , pero en general el
vector aceleracion no es tangente a la trayectoria de la partıcula cuando la traslacion es
curvilınea. La magnitud del vector aceleracion ~aP (t), se determinada determina de manera semejante
| ~aP (t) |=√
~aP (t) · ~aP (t), (5)
donde · representa el producto escalar del algebra vectorial tridimensionalDespues de esta introduccion libre de coordenadas conviene ahora determinar la velocidad y aceleracion
de la partıcula P empleando sistemas coordenados.
1.1 Cinematica de una partıcula sujeta a movimiento de traslacion curvilınea
analizada en componentes cartesianas.
Considere una partıcula P que se mueve respecto al sistema de referencia mostrado en la figura 4, el sistemade referencia fijo que esta provisto de un sistema coordenado cartesiano, por lo tanto, los vectores unitariosi, j y k en la direccion y sentido de los ejes coordenados X, Y , y Z respectivamente son vectores fijos, sumagnitud es unitaria y la orientacion de los vectores es tambien fija.
3
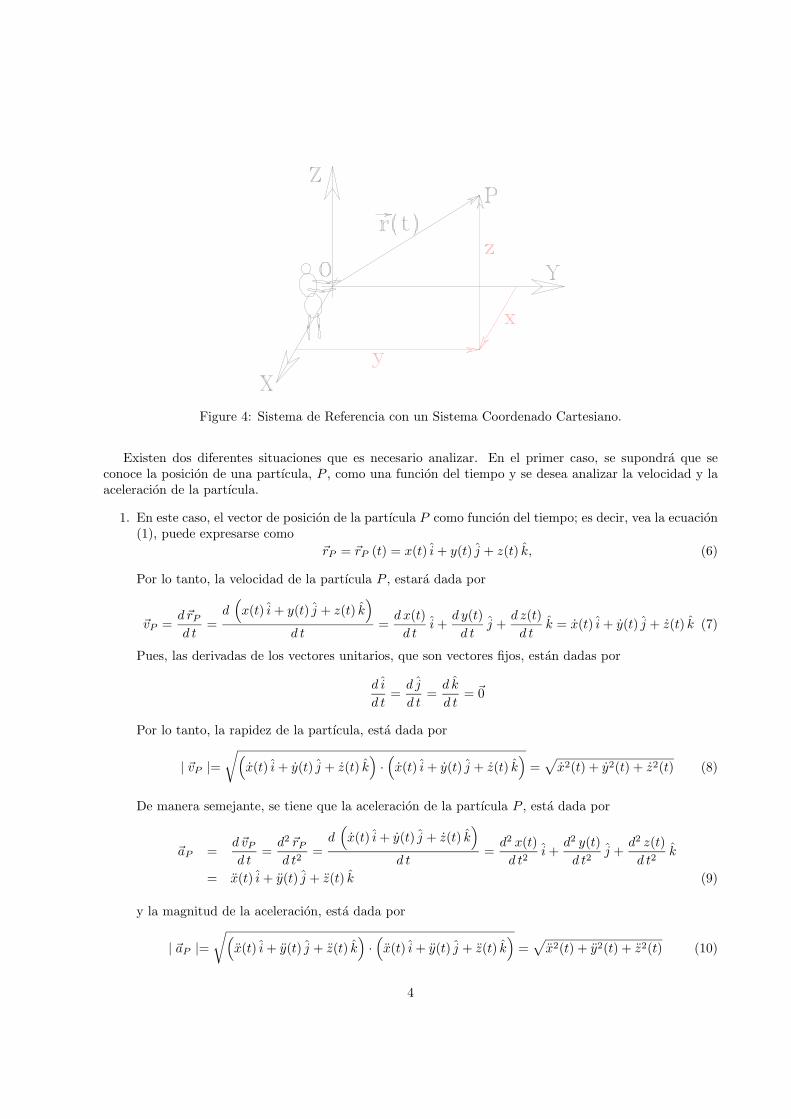
Figure 4: Sistema de Referencia con un Sistema Coordenado Cartesiano.
Existen dos diferentes situaciones que es necesario analizar. En el primer caso, se supondra que seconoce la posicion de una partıcula, P , como una funcion del tiempo y se desea analizar la velocidad y laaceleracion de la partıcula.
1. En este caso, el vector de posicion de la partıcula P como funcion del tiempo; es decir, vea la ecuacion(1), puede expresarse como
~rP = ~rP (t) = x(t) i + y(t) j + z(t) k, (6)
Por lo tanto, la velocidad de la partıcula P , estara dada por
~vP =d~rP
d t=
d(
x(t) i + y(t) j + z(t) k)
d t=
d x(t)
d ti +
d y(t)
d tj +
d z(t)
d tk = x(t) i + y(t) j + z(t) k (7)
Pues, las derivadas de los vectores unitarios, que son vectores fijos, estan dadas por
d i
d t=
d j
d t=
d k
d t= ~0
Por lo tanto, la rapidez de la partıcula, esta dada por
| ~vP |=√
(
x(t) i + y(t) j + z(t) k)
·(
x(t) i + y(t) j + z(t) k)
=√
x2(t) + y2(t) + z2(t) (8)
De manera semejante, se tiene que la aceleracion de la partıcula P , esta dada por
~aP =d~vP
d t=
d2 ~rP
d t2=
d(
x(t) i + y(t) j + z(t) k)
d t=
d2 x(t)
d t2i +
d2 y(t)
d t2j +
d2 z(t)
d t2k
= x(t) i + y(t) j + z(t) k (9)
y la magnitud de la aceleracion, esta dada por
| ~aP |=√
(
x(t) i + y(t) j + z(t) k)
·(
x(t) i + y(t) j + z(t) k)
=√
x2(t) + y2(t) + z2(t) (10)
4

Es importante notar que estas son las ecuaciones fundamentales y que existen muchas posibles condi-ciones que permitan relacionar estas ecuaciones para encontrar situaciones que podrıan parecer mascomplejas.
2. En un segundo caso, se supondra que se conoce la aceleracion de la partıcula, P , y se requieredeterminar la velocidad y la posicion de la partıcula, P . En este caso, la aceleracion de la partıcula, P ,estara dada, en su forma mas general, por una funcion de las posibles siguientes variables vPx, vPy, vPz,las componentes cartesianas de la velocidad de la partıcula P , x, y, z, las componentes cartesianas dela posicion de la partıcula, P , y el tiempo t.
~aP (vx, vy, vz, x, y, z, t) = aPx(vx, vy, vz, x, y, z, t)i
+aPy(vx, vy, vz, x, y, z, t)j + aPz(vx, vy, vz, x, y, z, t)k (11)
En este caso, el mas general, la determinacion de la posicion de la partıcula, P , se reduce a la solucionde un sistema de tres ecuaciones diferenciales en tres incognitas, las componentes cartesianas de laposicion de la partıcula P , de modo que
d2 x
d t2= aPx
(
d x
d t,d y
d t,d z
d t, x, y, z, t
)
(12)
d2 y
d t2= aPy
(
d x
d t,d y
d t,d z
d t, x, y, z, t
)
(13)
d2 z
d t2= aPz
(
d x
d t,d y
d t,d z
d t, x, y, z, t
)
(14)
En general, es imposible obtener una solucion cerrada a este sistema de ecuaciones diferencialesordinarias,1 excepto en aquellos casos, que afortunadamente son bastante importantes, en los que lasfunciones aPx, aPy, aPz sean muy sencillas. Sin embargo, si se satisfacen las condiciones de existenciay unicidad de las ecuaciones diferenciales y se conocen las condiciones iniciales del sistema, para
t = 0, x(0) = vx0, y(0) = vy0, z(0) = vz0, x(0) = x0, y(0) = y0, z(0) = z0.
Es siempre posible encontrar, mediante metodos numericos, una solucion del sistema de ecuacionesdiferenciales y determinar la posicion de la partıcula P y su trayectoria.
Uno de los casos mas simples de sistemas de ecuaciones diferenciales que es posible resolver en formacerrada es cuando las ecuaciones diferenciales estan desacopladas, en este caso, se tiene que laaceleracion, de la partıcula P , en cualquiera de sus componentes cartesianas, es funcion exclusiva delas componentes cartesianas correspondientes de la velocidad y la posicion de la misma partıcula, P ,y quizas del tiempo. Es decir, las ecuaciones se reducen a
d2 x
d t2= aPx
(
d x
d t, x, t
)
(15)
d2 y
d t2= aPy
(
d y
d t, y, t
)
(16)
d2 z
d t2= aPz
(
d z
d t, z, t
)
(17)
En este caso, cada una de las ecuaciones diferenciales pueden resolverse de manera independiente y lascomponentes de la posicion de la partıcula P , pueden determinarse en la manera indicada en el analisis
1En algunos casos, una alternativa es analizar si empleando algun otro sistema coordenado, las ecuaciones se simplifican.
5

de la cinematica de la partıcula sujeta a traslacion rectilınea. Precisamente el empleo de los sis-
temas coordenados cartesianos es especialmente apropiado cuando la aceleracion de la
partıcula puede descomponerse en tres componentes, desacopladas entre si, y cuando
las componentes de la aceleracion dependen exclusivamente de las correspondientes ve-
locidades, posiciones y el tiempo.
Figure 5: Programa Simulink c© para la Solucion de un Problema de Traslacion Curvilınea Espacial.
Como un ejemplo de solucion numerica de estos problemas de la cinematica de una partıcula sujetaa traslacion curvilınea espacial, considere el programa Simulink c©, mostrado en la figura 5, querepresenta la solucion del siguiente problema de cinematica de una partıcula sujeta a traslacioncurvilınea donde las ecuaciones de aceleracion estan desacopladas y dadas por
d2 rxP (t)
d t2= −4 rxP Condiciones Iniciales t = 0,
d rxP (0)
d t= 0, rxP (0) = 5. (18)
d2 ryP (t)
d t2= −4 ryP Condiciones Iniciales t = 0,
d ryP (0)
d t= 10, ryP (0) = 0. (19)
d rzP (t)
d t= 15 Condiciones Iniciales t = 0, rzP (0) = 0. (20)
Este sistema de ecuaciones diferenciales seguramente tendrıa solucion en forma cerrada, y muy prob-ablemente serıa mas facil resolver este problema empleando coordenadas cilındricas. El programaSimulink c© es, fundamentalmente, un programa para resolver numericamente ecuaciones diferencialesordinarias. La figura, 6, muestra los resultados de este problema
1.2 Cinematica de una partıcula sujeta a traslacion curvilınea plana.
En este caso, la partıcula esta sujeta a traslacion curvilınea, pero en este caso, la trayectoria esuna curva plana. Seleccionando adecuadamente el sistema de referencia y el sistema coordenadocartesiano, es posible, reducir las ecuaciones de una partıcula a la forma
d2 x
d t2= aPx
(
d x
d t,d y
d t, x, y, t
)
(21)
6
−5
0
5
−5
0
50
50
100
150
200
250
300
350
400
450
Coordenada X, u.l.Coordenada Y, u.l.
Coo
rden
ada
Z, u
.l.
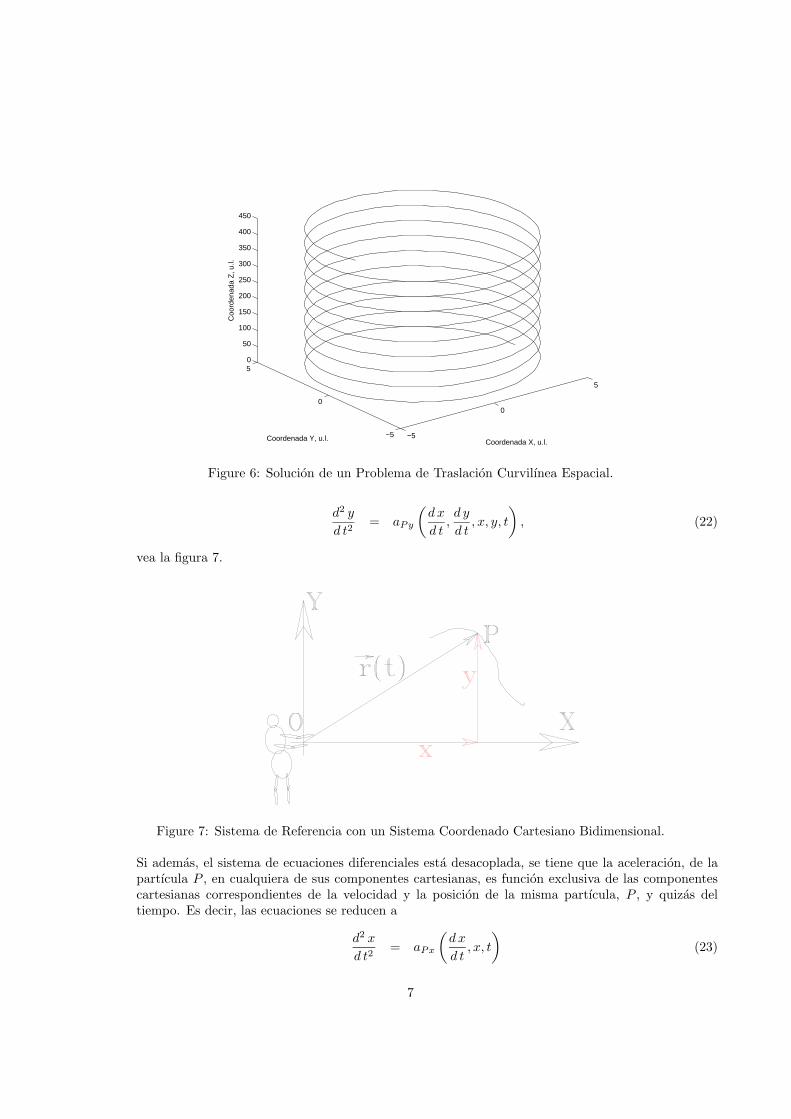
Figure 6: Solucion de un Problema de Traslacion Curvilınea Espacial.
d2 y
d t2= aPy
(
d x
d t,d y
d t, x, y, t
)
, (22)
vea la figura 7.
Figure 7: Sistema de Referencia con un Sistema Coordenado Cartesiano Bidimensional.
Si ademas, el sistema de ecuaciones diferenciales esta desacoplada, se tiene que la aceleracion, de lapartıcula P , en cualquiera de sus componentes cartesianas, es funcion exclusiva de las componentescartesianas correspondientes de la velocidad y la posicion de la misma partıcula, P , y quizas deltiempo. Es decir, las ecuaciones se reducen a
d2 x
d t2= aPx
(
d x
d t, x, t
)
(23)
7

d2 y
d t2= aPy
(
d y
d t, y, t
)
(24)
En este caso, cada una de las ecuaciones diferenciales pueden resolverse de manera independiente ylas componentes de la posicion de la partıcula P , pueden determinarse en la manera indicada en elanalisis de la cinematica de la partıcula sujeta a traslacion rectilınea.
1.2.1 Tiro Parabolico.
Un caso muy importante, es el caso conocido como tiro parabolico, que se define de la siguientemanera. Suponga que
~aP = −gj, (25)
donde g es la aceleracion de la gravedad, 9.81m/s2 o 32.2 pie/s2, sujeta a las siguientes condicionesiniciales. Para t = 0,
~vP (0) = v0 cos α i + v0 sinα j, ~rP (0) = 0 i + 0 j,
donde v0 es la velocidad inicial de la partıcula, que se conoce como proyectil, y α es el angulo inicialdel disparo. Esta situacion se muestra en la figura 8
Figure 8: Descripcion del tiro parabolico.
El primer paso en la solucion del tiro parabolico es la integracion de la aceleracion, puesto que
~aP = −gj,d~vP
d t= ~aP = −gj o ~vP (t) =
∫
~aP dt =
∫
−gj d t. (26)
o
~vP (t) =
∫
~aP dt =
∫
−gj d t = −g tj + ~C1. (27)
donde ~C1 es una constante de integracion que se determina a partir de las condiciones iniciales parat = 0, ~vP (0) = v0 cos α i + v0 sinα j. Sustituyendo la condicion inicial, se tiene que
~vP (0) = v0 cos α i + v0 sinα j = −g 0j + ~C1
8

Por lo tanto~C1 = v0 cos α i + v0 sinα j,
sustituyendo, esta constante en la ecuacion de la velocidad de la partıcula, P , se tiene que
~vP (t) = v0 cos α i + (v0 sinα − g t) j. (28)
Repitiendo, nuevamente el proceso de integracion, se tiene que
~vP (t) = v0 cos α i + (v0 sinα − g t) j, od~rP
d t= ~vP = v0 cos α i + (v0 sinα − g t) j. (29)
Por lo tanto
~rP =
∫
(
v0 cos α i + (v0 sinα − g t) j)
= v0 t cos α i +
(
v0 t sinα − 1
2g t2
)
j + ~C2. (30)
donde ~C2 es una constante de integracion que se determina a partir de las condiciones iniciales parat = 0, ~rP (0) = 0 i + 0 j. Sustituyendo la condicion inicial, se tiene que
~rP (0) = 0 i + 0 j = v0 0 cos α i +
(
v0 0 sinα − 1
2g 02
)
j + ~C2.
Por lo tanto~C2 = 0 i + 0 j.
sustituyendo, esta constante en la ecuacion de la posicion de la partıcula, P , se tiene que
~rP (t) = v0 t cos α i +
(
v0 t sinα − 1
2g t2
)
j. (31)
Las ecuaciones de movimiento de la partıcula tambien pueden analizarse de manera escalar, auncuando no es recomendable,2, en este caso se tiene que la aceleracion de la partıcula P , esta dada por
aPx = 0 aPy = −g.
la velocidad de la partıcula P esta dada por
vPx(t) = v0 cos α vPy(t) = v0 sinα − g t,
y la posicion de la partıcula esta dada por
rPx(t) = v0 t cos α rPy(t) = v0 t sinα − 1
2g t2.
A partir de esta descomposicion es claro que el tiro parabolico se compone de un movimiento uniformeen la direccion horizontal, la asociada al eje X, y un movimiento uniformemente acelerado en ladireccion vertical, la asociada al eje Y .
Partiendo de estas ecuaciones y variando las condiciones iniciales, es posible encontrar un gran numerode posibles variaciones que es imposible analizarlas todas. El fundamento debe consistir en compren-der, de manera precisa, el significado de las ecuaciones y, a partir, de esa comprension resolver losproblemas como se vayan presentando. A continuacion se presentan algunos de los analisis masrepresentativos
2Analizar escalarmente las ecuaciones es equivalente a hacer a un lado 150 anos de investigacion matematica en el algebray calculo vectorial.
9

(a) Determinacion de la altura maxima, hmax, del proyectil. En este caso, el problema se reduce aencontrar cual es la altura maxima que el proyectil puede alcanzar, cuando se ha seleccionadode antemano el angulo de disparo inicial, α. Puesto que los movimientos estan desacoplados, elmovimiento vertical del proyectil puede analizarse sin considerarse el movimiento horizontal. Asıpues, es evidente que la altura maxima se alcanzara cuando la velocidad vertical de la partıculasea nula. De manera que debemos determinar para que tiempo, t =?, la componente vertical dela velocidad vPy = 0, de la ecuacion (29), se tiene que
0 = vPy(t) = v0 sinα − g t,
por lo tanto
t =v0 sinα
g
La altura maxima, se determina calculando la posicion vertical del proyectil, rPy, cuando t =v0 sinα
g , es decir
hmax = rPy
∣
∣
∣
t=v0 sinα
g
= v0
(
v0 sinα
g
)
sinα − 1
2g
(
v0 sinα
g
)2
=v20 sin2α
2 g
El ultimo analisis asociado a la altura maxima consiste en determinar el angulo de disparo inicialαmax necesario para maximizar la altura maxima hmax. La solucion es evidente, la funcion sin2αtiene un maximo cuando
α = 90◦
En este caso, la altura maxima estara dado por
hMax = hmax
∣
∣
∣
α=90◦
=v20
2 g. (32)
Es evidente, que si el proyectil fuera explosivo, esta solucion rayaria en la estupidez.
(b) Determinacion del alcance maximo, rmax del proyectil. En este caso, el problema se reduce aencontrar cual es la distancia horizontal maxima que el proyectil puede alcanzar, cuando se haseleccionado de antemano el angulo de disparo inicial, α. En este caso, se necesita determinar cuales la posicion horizontal, rPx, del proyectil cuando la posicion vertical, rPy, es nuevamente
0. De manera que debemos determinar para que tiempo, t =?, la componente vertical de laposicion rPy = 0, de la ecuacion (30), se tiene que
0 = rPy(t) = v0 t sinα − 1
2g t2,
por lo tanto, las dos tiempos son3
t1 = 0, y t2 =2 v0 sinα
g
Es evidente que si t = 0, el vector de posicion del proyectil, resulta
~rP (0) = ~rP (t)∣
∣
∣
t=0
= v0 0 cos α i +
(
v0 0 sinα − 1
2g 02
)
j = 0i + 0j. (33)
3Debe notarse que el segundo tiempo es el doble del tiempo para el cual el proyectil alcanza su altura maxima, esteresultado se verifica por la simetrıa de la trayectoria del proyectil, respecto a la posicion en la cual, el proyectil obtiene sualtura maximo.
10

y representa la posicion inicial de disparo del proyectil.
Si se determina la posicion del proyectil para t = 2 v0 sinαg , la posicion del proyectil esta dada por
~rP (2 v0 sinα
g) = ~rP (t)
∣
∣
∣
t=2 v0 sinα
g
= v0
(
2 v0 sinα
g
)
cos α i +
[
v0
(
2 v0 sinα
g
)
sinα − 1
2g
(
2 v0 sinα
g
)2]
j
=2 v2
0 sinα cos α
gi =
v20sin(2α)
gi (34)
Asi pues, el alcance maximo esta dado por
rmax =v20sin(2α)
g
El ultimo analisis asociado al alcance maximo consiste en determinar el angulo de disparo inicialαmax necesario para maximizar el alcance maximo rmax. La solucion es evidente, la funcionsin(2α) tiene un maximo cuando
α = 45◦,
En este caso, el alcance maximo estara dado por
rMax = rmax
∣
∣
∣
α=45◦
=v20
g. (35)
2 Movimiento Relativo. Sistemas de Referencia Sujetos a Movi-
miento de Traslacion.
En esta seccion se presenta el estudio del movimiento de partıculas respecto a sistema de referencia sujetosa traslacion. Esta situacion es muy comun pues una partıcula, digamos B, vea la figura 9 puede observarsedesde dos diferentes sistemas de referencia, uno supuesto fijo, OXY Z, y otro representado por la elipse,AXT YT ZT , que esta sujeto a movimiento de traslacion, con la velocidad y la aceleracion del punto A.
De la figura 9, se tiene que~rB(t) = ~rA(t) + ~rB/A(t)
Entonces la velocidad de la partıcula B esta dada por
d~rB(t)
d t
∣
∣
∣
OXY Z=
d[
~rA(t) + ~rB/A(t)]
d t
∣
∣
∣
OXY Z=
d [~rA(t)]
d t
∣
∣
∣
OXY Z+
d[
~rB/A(t)]
d t
∣
∣
∣
OXY Z(36)
Donde
~vBOXY Z =d~rB(t)
d t
∣
∣
∣
OXY Z~vAOXY Z =
d [~rA(t)]
d t
∣
∣
∣
OXY Z~vB/AOXY Z =
d[
~rB/A(t)]
d t
∣
∣
∣
OXY Z
Entonces, la ecuacion (36) puede escribirse como
~vBOXY Z = ~vAOXY Z + ~vB/AOXY Z
11
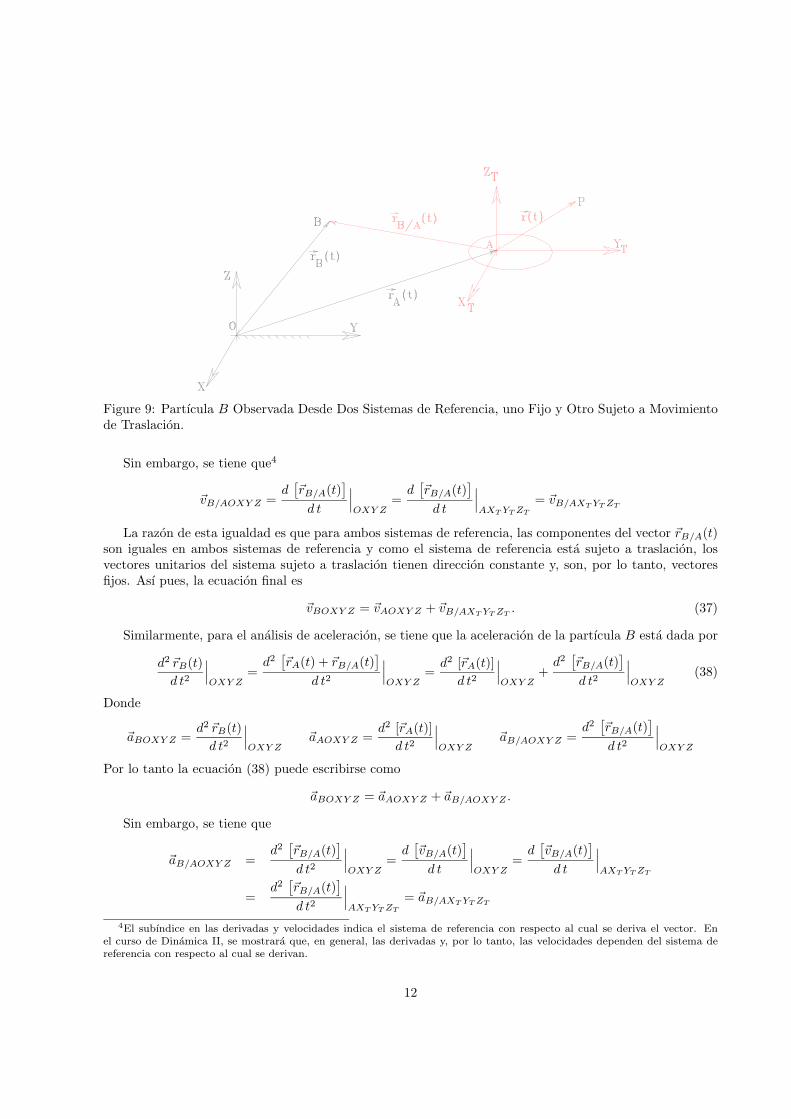
Figure 9: Partıcula B Observada Desde Dos Sistemas de Referencia, uno Fijo y Otro Sujeto a Movimientode Traslacion.
Sin embargo, se tiene que4
~vB/AOXY Z =d
[
~rB/A(t)]
d t
∣
∣
∣
OXY Z=
d[
~rB/A(t)]
d t
∣
∣
∣
AXT YT ZT
= ~vB/AXT YT ZT
La razon de esta igualdad es que para ambos sistemas de referencia, las componentes del vector ~rB/A(t)son iguales en ambos sistemas de referencia y como el sistema de referencia esta sujeto a traslacion, losvectores unitarios del sistema sujeto a traslacion tienen direccion constante y, son, por lo tanto, vectoresfijos. Ası pues, la ecuacion final es
~vBOXY Z = ~vAOXY Z + ~vB/AXT YT ZT. (37)
Similarmente, para el analisis de aceleracion, se tiene que la aceleracion de la partıcula B esta dada por
d2 ~rB(t)
d t2
∣
∣
∣
OXY Z=
d2[
~rA(t) + ~rB/A(t)]
d t2
∣
∣
∣
OXY Z=
d2 [~rA(t)]
d t2
∣
∣
∣
OXY Z+
d2[
~rB/A(t)]
d t2
∣
∣
∣
OXY Z(38)
Donde
~aBOXY Z =d2 ~rB(t)
d t2
∣
∣
∣
OXY Z~aAOXY Z =
d2 [~rA(t)]
d t2
∣
∣
∣
OXY Z~aB/AOXY Z =
d2[
~rB/A(t)]
d t2
∣
∣
∣
OXY Z
Por lo tanto la ecuacion (38) puede escribirse como
~aBOXY Z = ~aAOXY Z + ~aB/AOXY Z .
Sin embargo, se tiene que
~aB/AOXY Z =d2
[
~rB/A(t)]
d t2
∣
∣
∣
OXY Z=
d[
~vB/A(t)]
d t
∣
∣
∣
OXY Z=
d[
~vB/A(t)]
d t
∣
∣
∣
AXT YT ZT
=d2
[
~rB/A(t)]
d t2
∣
∣
∣
AXT YT ZT
= ~aB/AXT YT ZT
4El subındice en las derivadas y velocidades indica el sistema de referencia con respecto al cual se deriva el vector. Enel curso de Dinamica II, se mostrara que, en general, las derivadas y, por lo tanto, las velocidades dependen del sistema dereferencia con respecto al cual se derivan.
12
De nueva cuenta, la razon de esta igualdad es que para ambos sistemas de referencia, las componentesdel vector
~aB/AOXY Z =d
[
~vB/A(t)]
d t
∣
∣
∣
OXY Z=
d[
~vB/A(t)]
d t
∣
∣
∣
B/AXT YT ZT
= ~aB/AXT YT ZT
son iguales en ambos sistemas de referencia y como el sistema de referencia esta sujeto a traslacion, losvectores unitarios del sistema sujeto a traslacion tienen direccion constante y, son, por lo tanto, vectoresfijos. Ası pues, la ecuacion final es
~aBOXY Z = ~aAOXY Z + ~aB/AXT YT ZT. (39)
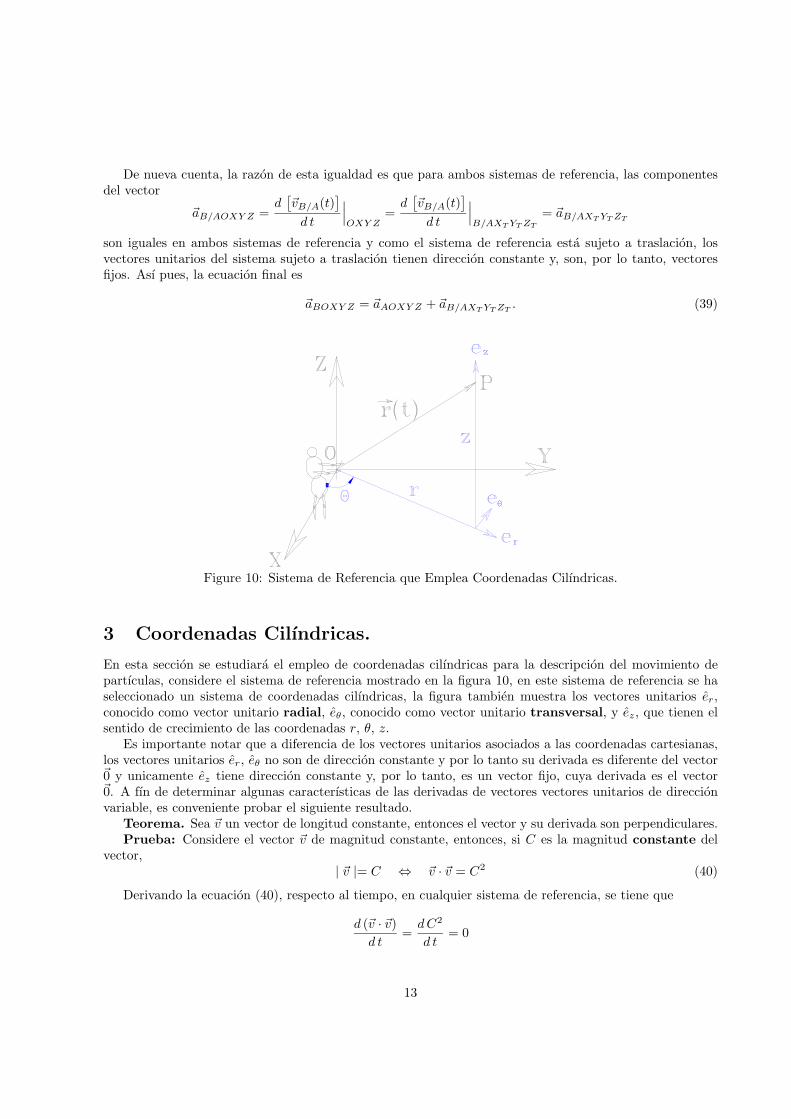
Figure 10: Sistema de Referencia que Emplea Coordenadas Cilındricas.
3 Coordenadas Cilındricas.
En esta seccion se estudiara el empleo de coordenadas cilındricas para la descripcion del movimiento departıculas, considere el sistema de referencia mostrado en la figura 10, en este sistema de referencia se haseleccionado un sistema de coordenadas cilındricas, la figura tambien muestra los vectores unitarios er,conocido como vector unitario radial, eθ, conocido como vector unitario transversal, y ez, que tienen elsentido de crecimiento de las coordenadas r, θ, z.
Es importante notar que a diferencia de los vectores unitarios asociados a las coordenadas cartesianas,los vectores unitarios er, eθ no son de direccion constante y por lo tanto su derivada es diferente del vector~0 y unicamente ez tiene direccion constante y, por lo tanto, es un vector fijo, cuya derivada es el vector~0. A fın de determinar algunas caracterısticas de las derivadas de vectores vectores unitarios de direccionvariable, es conveniente probar el siguiente resultado.
Teorema. Sea ~v un vector de longitud constante, entonces el vector y su derivada son perpendiculares.Prueba: Considere el vector ~v de magnitud constante, entonces, si C es la magnitud constante del
vector,| ~v |= C ⇔ ~v · ~v = C2 (40)
Derivando la ecuacion (40), respecto al tiempo, en cualquier sistema de referencia, se tiene que
d (~v · ~v)
d t=
dC2
d t= 0
13

Por lo tantod~v
d t· ~v + ~v · d~v
d t= 0,
Sin embargo, el producto escalar, o producto punto, es conmutativo5, se tiene que
2d~v
d t· ~v = 0,
o, finalmented~v
d t· ~v = 0. (41)
Este resultado precisamente indica que el vector de longitud constante y su derivada son perpendiculares.En terminos de las coordenadas cartesianas, se tiene que los vectores unitarios er, eθ y ez asociados a
las coordenadas cilındricas, estan dados por
er = cos θ i + sen θ j + 0 k
eθ = −sen θ i + cos θ j + 0 k (42)
ez = 0 i + 0 j + 1 k
Las ecuaciones (42) permiten transformar un vector escrito en coordenadas cilındricas en el mismovector escrito en coordenadas cartesianas, en forma matricial, la ecuacion (42) puede escribirse como
er
eθ
ez
=
cos θ sen θ 0−sen θ cos θ 0
0 0 1
i
j
k
Es facil probar que las ecuaciones que permiten transformar un vector representado en coordenadascartesianas a su representacion en coordenadas cilındricas estan dadas por
i = cos θ er − sen θ eθ + 0 ez
j = sen θ er + cos θ eθ + 0 ez (43)
k = 0 er + 0 eθ + 1 ez
Derivando, respecto al tiempo, los vectores unitarios er, eθ y ez, a partir de las ecuaciones (42), se tieneque
˙er = −θ sen θ i + θ cos θ j + 0 k˙eθ = −θ cos θ i − θ sen θ j + 0 k˙ez = 0 i + 0 j + 0 k
Sustituyendo las ecuaciones (43) en las derivadas, se obtiene
˙er = −θ sen θ (cos θ er − sen θ eθ) + θ cos θ (sen θ er + cos θ eθ) = θeθ
˙eθ = −θ cos θ (cos θ er − sen θ eθ) − θ sen θ (sen θ er + cos θ eθ) = −θer (44)
˙ez = 0 i + 0 j + 0 k = ~0
Con estos resultados, es muy sencillo determinar la velocidad y aceleracion de una partıcula sujeta atranslacion curvilınea espacial en coordenadas cilındricas. Para la velocidad, se tiene que
~v =d~r
d t=
d (r er + zez)
d t=
d r
d ter + r
d er
d t+
d z
d tez = r er + r θeθ + z ez. (45)
5En algunos cursos mas teoricos de matematicas, se dice que es producto escalar es simetrico.
14

De manera semejante, la aceleracion de la partıcula esta dada por
~a =d~v
d t=
d(
r er + r θeθ + z ez
)
d t=
d r
d ter + r
d er
d t+
d r
d tθeθ + r
d θ
d teθ + r θ
d eθ
d t+
d z
d tez
= r er + r θeθ + r θeθ + r θeθ − r θ2er + z ez =(
r − r θ2
)
er +(
2 r θ + r θ)
eθ + z ez. (46)
Si el movimiento de la partıcula es en el plano, este analisis se reduce al analisis de componentes radialy transversal, dadas respectivamente por r − r θ2 y 2 r θ + r θ mas aun, el termino de la componentetransversal de la aceleracion dado por 2 r θ, se denomina aceleracion Coriolis, y aparece siempre que unapartıcula tiene movimiento relativo respecto a un sistema de referencia sujeto a movimiento de rotacion.Esta observacion parece paradojica, en el curso de Dinamica I, se estudia el movimiento de partıculas,precisamente para evitar el movimiento de rotacion, sin embargo, el estudio del movimiento de una partıculamediante coordenadas cilındricas o esfericas, necesariamente implica estudiar, de manera un tanto cuantooculta, movimientos de rotacion.
4 Coordenadas Esfericas.
Figure 11: Sistema de Referencia que Emplea Coordenadas Esfericas.
En esta seccion se estudiara el empleo de coordenadas esfericas para la descripcion del movimiento departıculas, considere el sistema de referencia mostrado en la figura 11, en este sistema de referencia se haseleccionado un sistema de coordenadas esfericas, la figura tambien muestra los vectores unitarios er, eθ yeφ, que tienen el sentido de crecimiento de las coordenadas r, θ, φ. Es importante senalar que el vectorunitario eθ esta localizado en el plano X − Y , mientras que los vectores unitarios er y eφ estan localizadosen el plano formado por los puntos O, P y M que es perpendicular a eθ.
Es importante notar que a diferencia de los vectores unitarios asociados a las coordenadas cartesianas,los vectores unitarios er, eθ y eφ no son de direccion constante y por lo tanto su derivada es diferente del
vector ~0. Es importante notar que el vector unitario er que se define en coordenadas cilındricas es diferenteal vector unitario er que se define en coordenadas esfericas. Ademas, la figura 11 contiene una vista delplano OPM que facilita la determinacion de las componentes cartesianas de los vectores unitarios er y eφ.
15

En esta seccion se seguira el procedimiento mostrado en la seccion de coordenadas cilındricas, los vectoresunitarios er, eθ y eφ, estan dados, en terminos de coordenadas cartesianas, por
er = cos φ cos θ i + cos φ sen θ j + senφ k
eθ = −sen θ i + cos θ j + 0 k (47)
eφ = −senφ cos θ i − senφ sen θ j + cos φ k
Las ecuaciones (47) permiten transformar un vector escrito en coordenadas esfericas en el mismo vectorescrito en coordenadas cartesianas, en forma matricial, la ecuacion (47) puede escribirse como
er
eθ
eφ
=
cos φ cos θ cos φ sen θ senφ−sen θ cos θ 0
−senφ cos θ −senφ sen θ cos φ
i
j
k
= M2
i
j
k
(48)
La matriz M2, que aparece en la ecuacion (48), tiene propiedades muy particulares, su determinantees igual a 1. Las filas y las columnas de la matriz son mutuamente ortonormales. La matriz se denominaortogonal propia y, en cursos mas avanzados de cinematica, puede mostrarse que es la representacion deuna rotacion. En particular, estas propiedades significan que los vectores unitarios er, eθ, eφ forman unsistema ortogonal a derechas, es decir
er × eθ = eφ
En forma desarrollada
er × eθ =(
cos φ cos θ i + cos φ sen θ j + senφ k)
×(
−sen θ i + cos θ j + 0 k)
= −senφ cos θ i − senφ sen θ j + cos φ k = eφ
Ademas se tiene que
MT2 =
cos (φ) cos (θ) −sen (θ) −sen (φ) cos (θ)
cos (φ) sen (θ) cos (θ) −sen (φ) sen (θ)
sen (φ) 0 cos (φ)
es tambien su inversa, es decirMT
2 = M−1
2,
pues
M2 MT2 =
cos (φ) cos (θ) cos (φ) sen (θ) sen (φ)
−sen (θ) cos (θ) 0
−sen (φ) cos (θ) −sen (φ) sen (θ) cos (φ)
cos (φ) cos (θ) −sen (θ) −sen (φ) cos (θ)
cos (φ) sen (θ) cos (θ) −sen (φ) sen (θ)
sen (φ) 0 cos (φ)
=
1 0 00 1 00 0 1
Por lo tanto, los coeficientes de la matriz transpuesta que es la inversa permiten transformar un vectorrepresentado en coordenadas cartesianas a su representacion en coordenadas cilındricas estan dadas por
i = cos φ cos θ er − sen θ eθ − senφ cos θ eφ
j = cos φ sen θ er + cos θ eθ − senφ sen θ eφ (49)
k = senφ er + 0 eθ + cos φ eφ
16

Ahora calcularemos las derivadas de los vectores unitarios del sistema de coordenadas esfericas.
˙er = −φ senφ cos θ i − θcos φ sen θ i − φ senφ sen θ j + θ cos φ cos θ j + φ cos φ k
=(
−φ senφ cos θ − θcos φ sen θ)
(cos φ cos θ er − sen θ eθ − senφ cos θ eφ)
+(
−φ senφ sen θ + θ cos φ cos θ)
(cos φ sen θ er + cos θ eθ − senφ sen θ eφ)
+φ cos φ (senφ er + 0 eθ + cos φ eφ)
= er
(
− φ senφ cos φ cos2 θ − θ cos2 φ sen θ cos θ − φ cos φ senφ sen2 θ + θ cos2 φ sen θ cos θ
+φ senφ cos φ)
+ eθ
(
φ senφ cos θ sen θ + θ sen2 θ cos φ − φ senφ sen θ cos θ + θ cos φ cos2 θ)
+eφ
(
φ sen2 φ cos2 θ + θ sen φ cos φ sen θ cos θ + φ sen2 φ sen2 θ − θ sen φ cos φ sen θ cos θ + φ cos2 φ)
= er
(
φ senφ cos φ − φ senφ cos φ)
+ eθ
(
θ cos φ)
+ eφ
(
φ sen2 φ + φ cos2 φ)
= θ cos φ eθ + φ eφ (50)
˙eθ = −θ cos θ i − θ sen θ j
= −θ cos θ (cos φ cos θ er − sen θ eθ − senφ cos θ eφ) − θ sen θ (cos φ sen θ er + cos θ eθ − senφ sen θ eφ)
= er
(
−θ cos φ cos2 θ − θ cos φ sen2 θ)
+ eθ
(
θ sen θ cos θ − θ sen θ cos θ)
+eφ
(
+θ sen φ cos2 θ + θ sen φ sen2 θ)
= −θ cos φ er + θ sen φ eφ. (51)
˙eφ = −φ cos φ cos θ i + θsen φ sen θ i − φ cos φ sen θ j − θ sen φ cos θ j − φ senφ k
=(
−φ cos φ cos θ + θsen φ sen θ)
(cos φ cos θ er − sen θ eθ − senφ cos θ eφ)
+(
−φ cos φ sen θ − θ sen φ cos θ)
(cos φ sen θ er + cos θ eθ − senφ sen θ eφ)
−φ senφ (senφ er + 0 eθ + cos φ eφ)
= er
(
− φ cos2 φ cos2 θ + θ sen φ cos φ sen θ cos θ − φ cos2 φ sen2 θ − θ sen φ senφ sen θ cos θ
−φ sen2 φ)
+ eθ
(
+ φ cos φ sen θ cos θ − θ sen2 θ senφ − φ cos φ sen θ cos θ − θ sen φ cos2 θ)
+eφ
(
φ senφ cos φ cos2 θ − θ sen2 φ sen θ cos θ + φ cos φ senφ sen2 θ + θ sen2 φ sen θ cos θ − φ sen2φ cos φ)
= er
[
−φ cos2 φ(cos2 θ + sen2 θ) − φ sen2 φ]
+ eθ
[
−θ sen φ(sen2 θ + cos2 θ)]
+eφ
[
φ cos φ senφ(cos2 θ + sen2 θ) − φ senφ cos φ]
= −φ er − θ sen φ eθ. (52)
Una vez obtenidas estas derivadas, el analisis de velocidad y aceleracion de una partıcula, cuando sumovimiento se describe en cordenadas esfericas es muy sencillo. A partir de la definicion del vector deposicion de la partıcula, se tiene que
~r(t) = r(t) er, (53)
donde r(t) es el escalar que representa la magnitud del vector de posicion y esta dada por
r(t) =| ~r(t) | .
17

Por lo tanto, derivando la ecuacion (53) con respecto al tiempo, la velocidad esta dada por
~v(t) =d~r(t)
d t=
d (r(t) er)
d t=
d (r(t))
d ter+r(t)
d (er)
d t= r er+r
(
θ cos φ eθ + φ eφ
)
= r er+rθ cos φ eθ+r φ eφ
(54)Volviendo a derivar la ecuacion de la velocidad, (54), con respecto al tiempo, se obtiene la aceleracion
como
~a(t) =d~v(t)
d t=
d(
r er + rθ cos φ eθ + r φ eφ
)
d t
= r er + r ˙er + r θ cos φ eθ + r θ cos φ eθ − r θ φ senφ eθ + r θ cos φ ˙eθ + r φ eφ + r φ eφ + r φ ˙eφ
= r er + r(
θ cos φ eθ + φ eφ
)
+ r θ cos φ eθ + r θ cos φ eθ − r θ φ senφ eθ +(
r φ + r φ)
eφ
+r θ cos φ(
−θ cos φ er + θ sen φ eφ
)
+ r φ(
−φer − θ sen φ eθ
)
=(
r − r φ2 − r θ2 cos2 φ)
er +(
2 r θ cos φ + r θ cos φ − 2 r φ θ senφ)
eθ
+(
2 r φ + r φ + r θ2 senφ cos φ)
eφ (55)
Con estas ecuaciones, es posible analizar la cinematica de partıculas cuando la descripcion de usmovimiento se realiza en coordenadas esfericas.
5 Componentes Normal y Tangencial.
Esta ultima seccion de estas notas analizan la cinematica de una partıcula sujeta a traslacion curvilıneaplana mediante componentes normal y tangencial. Contrario al estudio de la cinematica de la partıculaempleando coordenadas cartesianas, cilındricas o esfericas, en esta seccion no se estudia la cinematica deuna partıcula sujeta a traslacion curvilınea espacial porque el estudio de las propiedades diferenciales deuna curva espacial nos llevarıa al menos dos clases que no puedo darme el lujo de emplear.
Para el analisis de esta seccion, se recordaran algunos conceptos de la seccion 1, que se repiten acontinuacion. Considere una partıcula P cuyo vector de posicion con respecto a un sistema de referenciaesta dado, como funcion del tiempo, por la ecuacion (1), repetida a continuacion
~rP = ~rP (t),
Si se conoce la trayectoria de la partıcula, la posicion de la partıcula unicamente requiere conocer la distancias, recorrida por la partıcula desde un punto de inicio arbitrario sobre la trayectoria de la partıcula, que enla figura 12, se ha escogido como O∗6. Considere una partıcula P , vea la figura 12, que es semejante a lafigura 2 y considere dos instantes de tiempo, t y t + ∆t junto con los vectores de posicion correspondientespara esos tiempos.
La velocidad de la partıcula P se define como
~vP (t) = Lim∆ t→0
~rP (t + ∆t) − ~rP (t)
∆ t= Lim∆ t→0
∆~rP
d t=
d~rP (t)
d t(56)
Puesto que para dos tiempos cualesquiera, t, y t + ∆ t, el vector
∆~rP = ~rP (t + ∆t) − ~rP (t),
6Si una partıcula esta sujeta a traslacion curvilınea plana, la partıcula tiene dos grados de libertad. Sin embargo, enapariencia, en este caso unicamente es necesario conocer la variable s, indicando con esto que la partıcula tiene unicamente ungrado de libertad. Sin embargo, es necesario reconocer que el conocimiento de la trayectoria representa un grado de libertadadicional.
18

Figure 12: Determinacion de la Velocidad de una Partıcula Sujeta a Traslacion Curvilınea.
es secante a la trayectoria de la partıcula, es facil comprender que a medida que ∆ t → 0, el vector ∆~rP yel vector velocidad ~vP (t) se vuelven tangentes a la trayectoria en el punto P . La magnitud delvector velocidad ~vP (t), determinada como,
| ~vP (t) |=√
~vP (t) · ~vP (t), (57)
donde · representa el producto escalar del algebra vectorial tridimensional, se conoce como la rapidez de lapartıcula y a diferencia de la velocidad, la rapidez es una cantidad escalar. Siguiendo el mismo argumento,puesto que para dos tiempos cualesquiera, t, y t + ∆ t, el vector
∆~rP = ~rP (t + ∆t) − ~rP (t),
es secante a la trayectoria de la partıcula, es facil comprender que la magnitud del vector ∆~rP , denotadapor | ∆~rP |, es una buena aproximacion a la distancia recorrida por la partıcula P sobre la trayectoriay que a medida que ∆ t → 0, la magnitud del vector velocidad, ~vP (t), es decir la rapidez, es igual a lavelocidad con que la partıcula P recorre la trayectoria
| ~vP (t) |=√
~vP (t) · ~vP (t) =d s
d t= s. (58)
Si se define el vector unitario tangente, t, como un vector de longitud unitaria, tangente a la trayectoria,y en sentido de crecimiento de la distancia recorrida, se puede escribir el vector velocidad como
~vP (t) =d s
d tt = s t. (59)
Entonces, derivando la ecuacion (59), con respecto al tiempo, se tiene que
~aP (t) =d~vP (t)
d t=
d(
s t)
d t= s t + s
d t
d t, (60)
donde s se define como
s =d s
d t=
d (| ~vP (t) |)d t
,
y fısicamente representa la tasa de cambio, con respecto al tiempo, de la rapidez de la partıcula, es decir,de la magnitud del vector velocidad.
19

Es necesario, ahora, determinar la derivada del vector unitario t, es necesario recordar que de antemanose conoce que la derivada del vector unitario tangente debe ser perpendicular al propio vector unitariotangente.
Figure 13: Determinacion de la Componente Normal de la Aceleracion.
Considere la figura 13 que muestra la partıcula P y los vectores unitarios tangentes para dos instantesde tiempo, t y t+∆ t. La figura muestra ademas, en centro de curvatura de la trayectoria para el tiempo t,punto C, ası como el radio de curvatura correspondiente, ρ. Mas aun, la figura 13 muestra una ampliacionde los vectores unitarios tangentes para dos instantes de tiempo, t y t + ∆ t. Es evidente que la direccionde la derivada del vector unitatio tangente para el tiempo t, t(t), es la del vector unitario normal, n, queva del punto P (t) al centro de curvatura de la trayectoria de la partıcula. En cuanto la magnitud de laderivada se tiene que
∣
∣
∣
∣
d t
d t
∣
∣
∣
∣
= Lim∆ t→0
| ∆ t |∆ t
= Lim∆ t→0
1 θ
∆ t= Lim∆ t→0
∆ sρ
∆ t=
1
ρLim∆ t→0
∆ s
∆ t=
1
ρ
d s
d t=
s
ρ.
Por lo tantod t
d t=
s
ρn. (61)
Sustituyendo este resultado en la ecuacion (60), se tiene que
~aP (t) = s t + sd t
d t= s t + s
s
ρn = s t +
s2
ρn = at t + an n. (62)
La aceleracion de la partıcula ~aP (t), puede descomponerse en una componente normal, dada por
an =s2
ρ(63)
y una componente tangencial, dada por
at = s =d s
d t=
d (| ~vP (t) |)d t
. (64)
20
6 Problemas Resueltos.
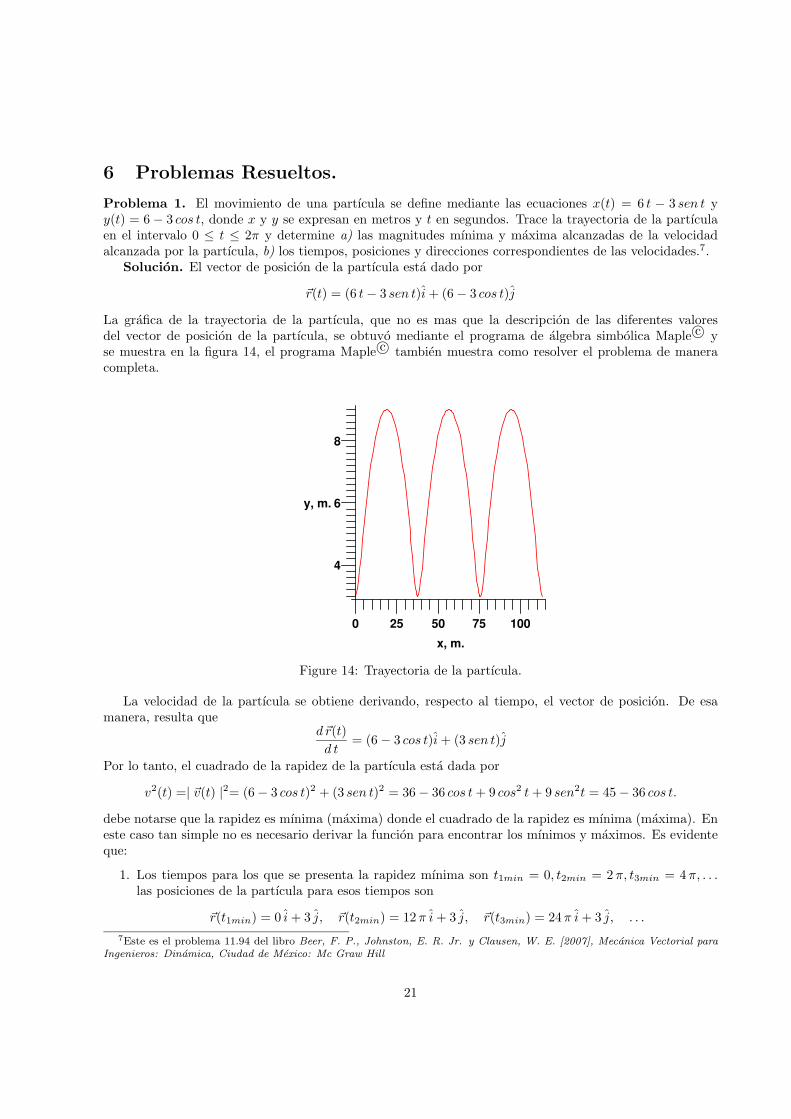
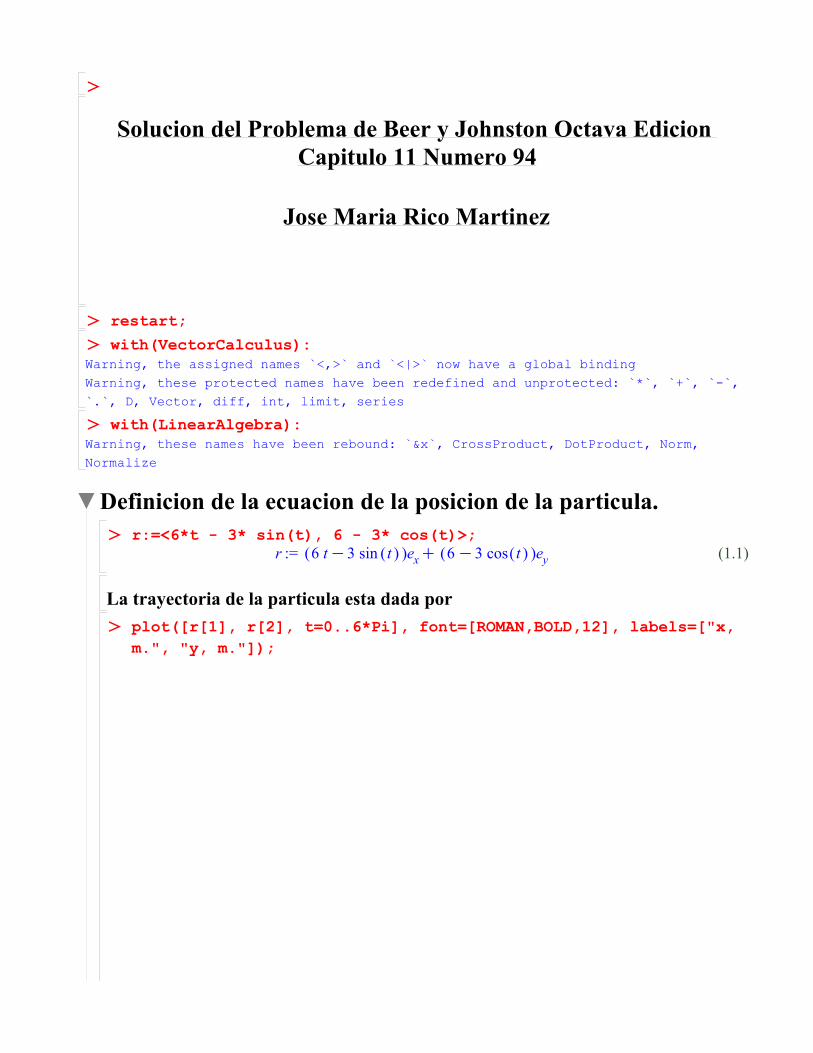
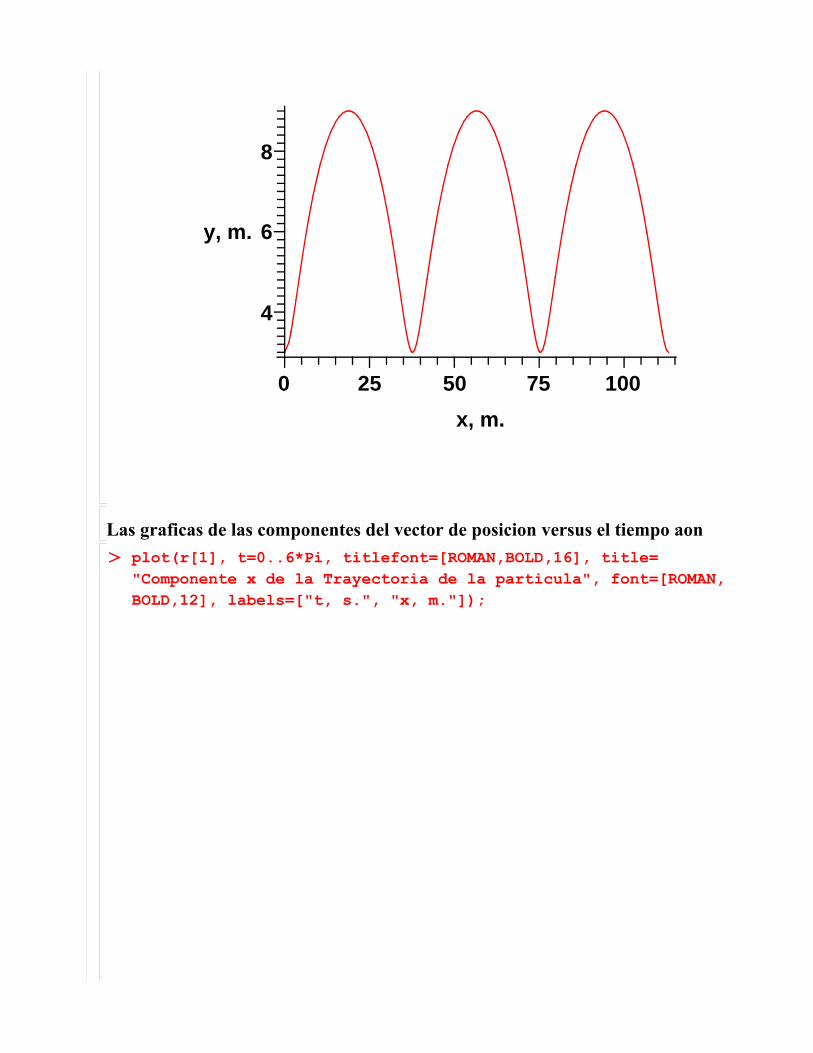
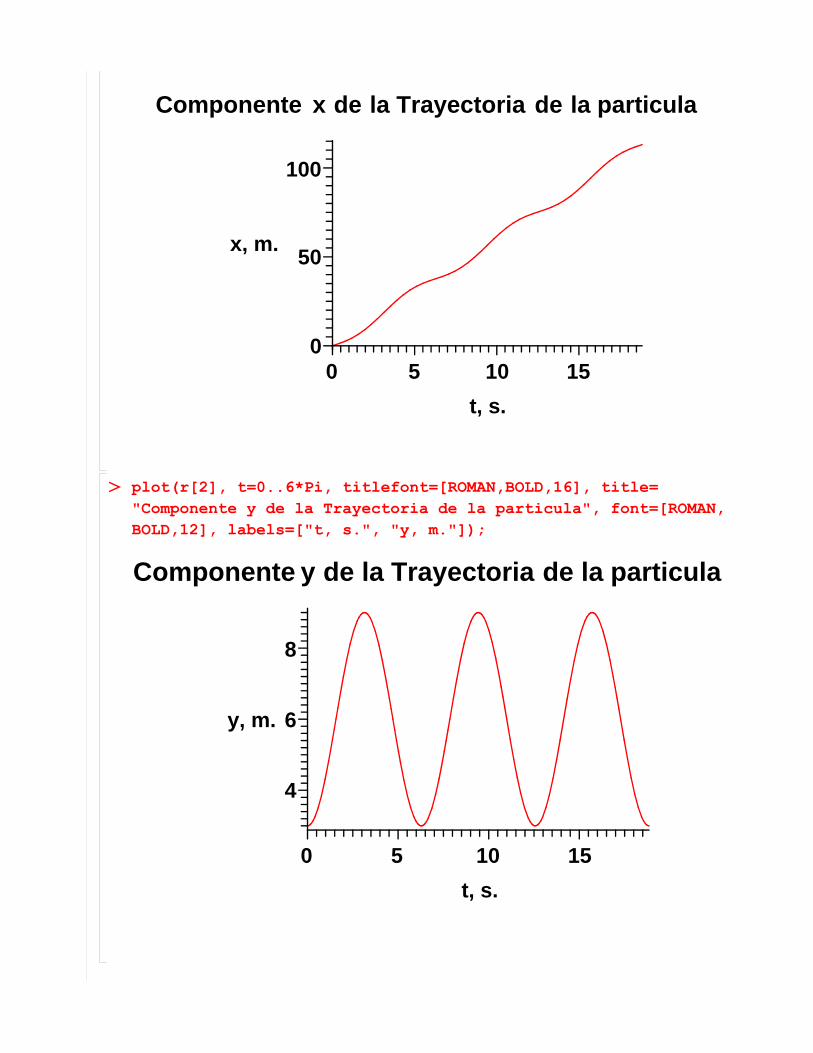
Problema 1. El movimiento de una partıcula se define mediante las ecuaciones x(t) = 6 t − 3 sen t yy(t) = 6 − 3 cos t, donde x y y se expresan en metros y t en segundos. Trace la trayectoria de la partıculaen el intervalo 0 ≤ t ≤ 2π y determine a) las magnitudes mınima y maxima alcanzadas de la velocidadalcanzada por la partıcula, b) los tiempos, posiciones y direcciones correspondientes de las velocidades.7.
Solucion. El vector de posicion de la partıcula esta dado por
~r(t) = (6 t − 3 sen t)i + (6 − 3 cos t)j
La grafica de la trayectoria de la partıcula, que no es mas que la descripcion de las diferentes valoresdel vector de posicion de la partıcula, se obtuvo mediante el programa de algebra simbolica Maple c© yse muestra en la figura 14, el programa Maple c© tambien muestra como resolver el problema de maneracompleta.
4
x, m.
8
500
6y, m.
7525 100
Figure 14: Trayectoria de la partıcula.
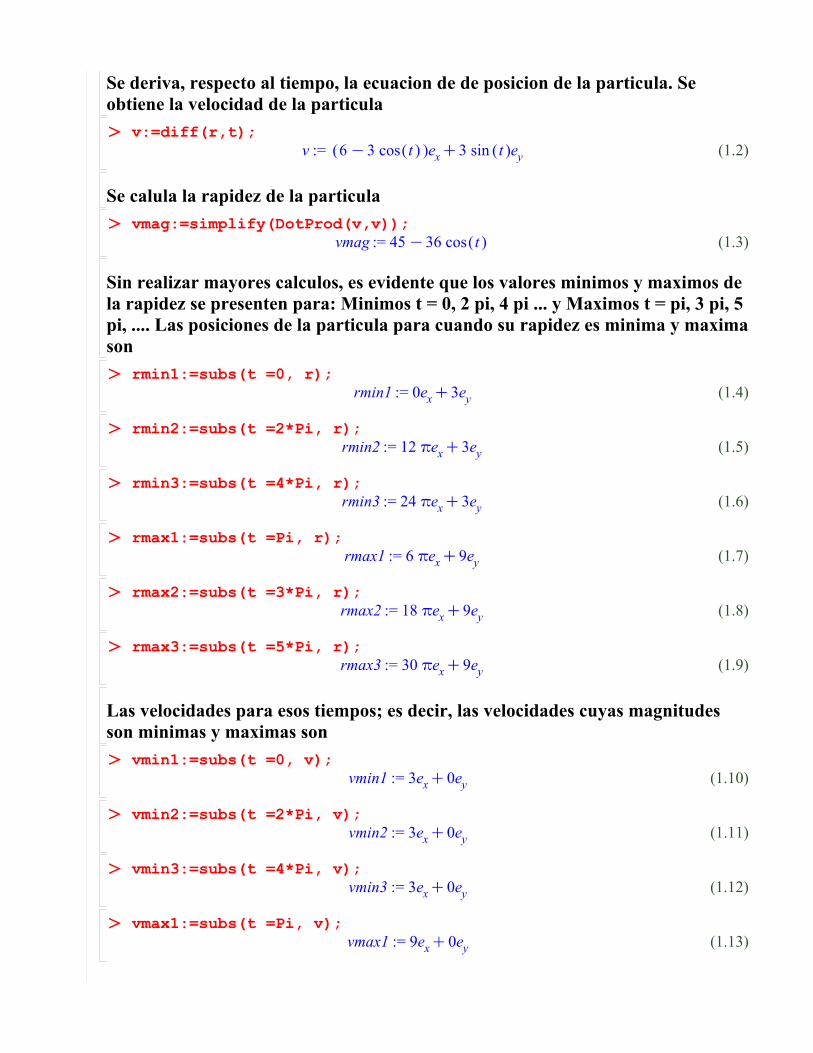
La velocidad de la partıcula se obtiene derivando, respecto al tiempo, el vector de posicion. De esamanera, resulta que
d~r(t)
d t= (6 − 3 cos t)i + (3 sen t)j
Por lo tanto, el cuadrado de la rapidez de la partıcula esta dada por
v2(t) =| ~v(t) |2= (6 − 3 cos t)2 + (3 sen t)2 = 36 − 36 cos t + 9 cos2 t + 9 sen2t = 45 − 36 cos t.
debe notarse que la rapidez es mınima (maxima) donde el cuadrado de la rapidez es mınima (maxima). Eneste caso tan simple no es necesario derivar la funcion para encontrar los mınimos y maximos. Es evidenteque:
1. Los tiempos para los que se presenta la rapidez mınima son t1min = 0, t2min = 2π, t3min = 4π, . . .las posiciones de la partıcula para esos tiempos son
~r(t1min) = 0 i + 3 j, ~r(t2min) = 12π i + 3 j, ~r(t3min) = 24π i + 3 j, . . .
7Este es el problema 11.94 del libro Beer, F. P., Johnston, E. R. Jr. y Clausen, W. E. [2007], Mecanica Vectorial paraIngenieros: Dinamica, Ciudad de Mexico: Mc Graw Hill
21
y las velocidades correspondientes son
~v(t1min) = ~v(t2min) = ~r(t3min) = 3 i + 0 j, . . .
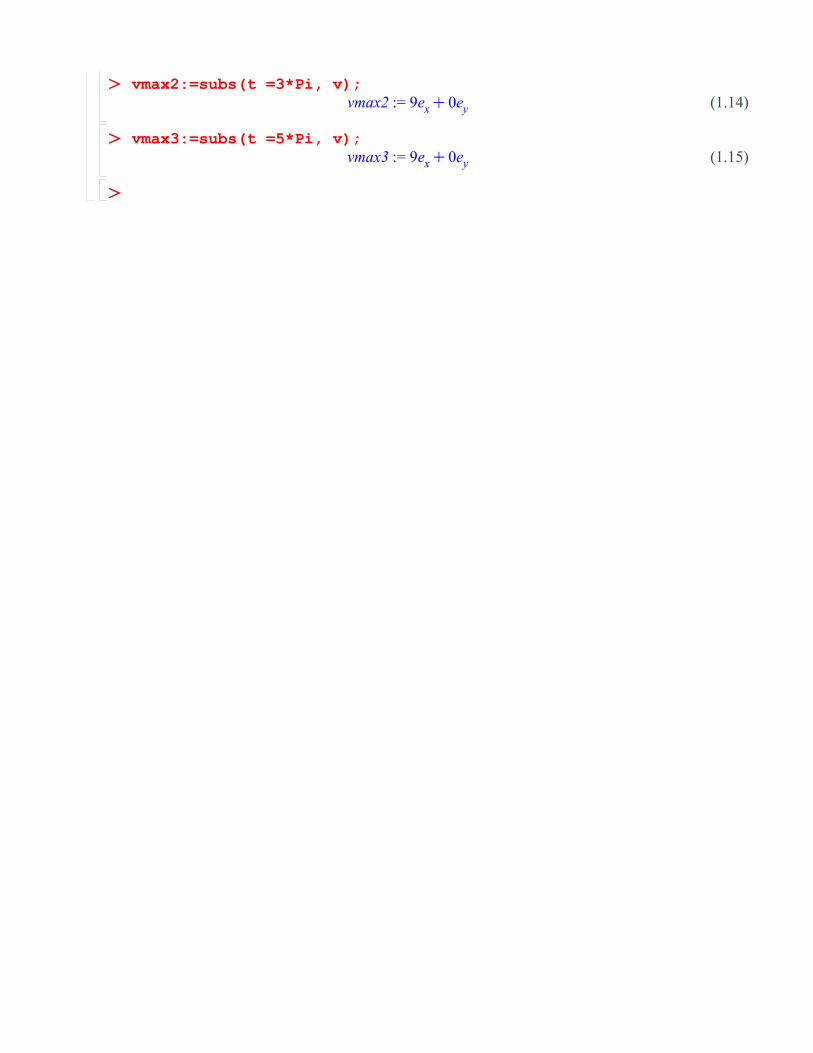
2. Los tiempos para los que se presenta la rapidez maxima son t1max = π, t2max = 3π, t3max = 5π, . . .las posiciones de la partıcula para esos tiempos son
~r(t1max) = 6π i + 9 j, ~r(t2max) = 18π i + 9 j, ~r(t3max) = 30π i + 9 j, . . .
y las velocidades correspondientes son
~v(t1max) = ~v(t2max) = ~r(t3max) = 9 i + 0 j, . . .
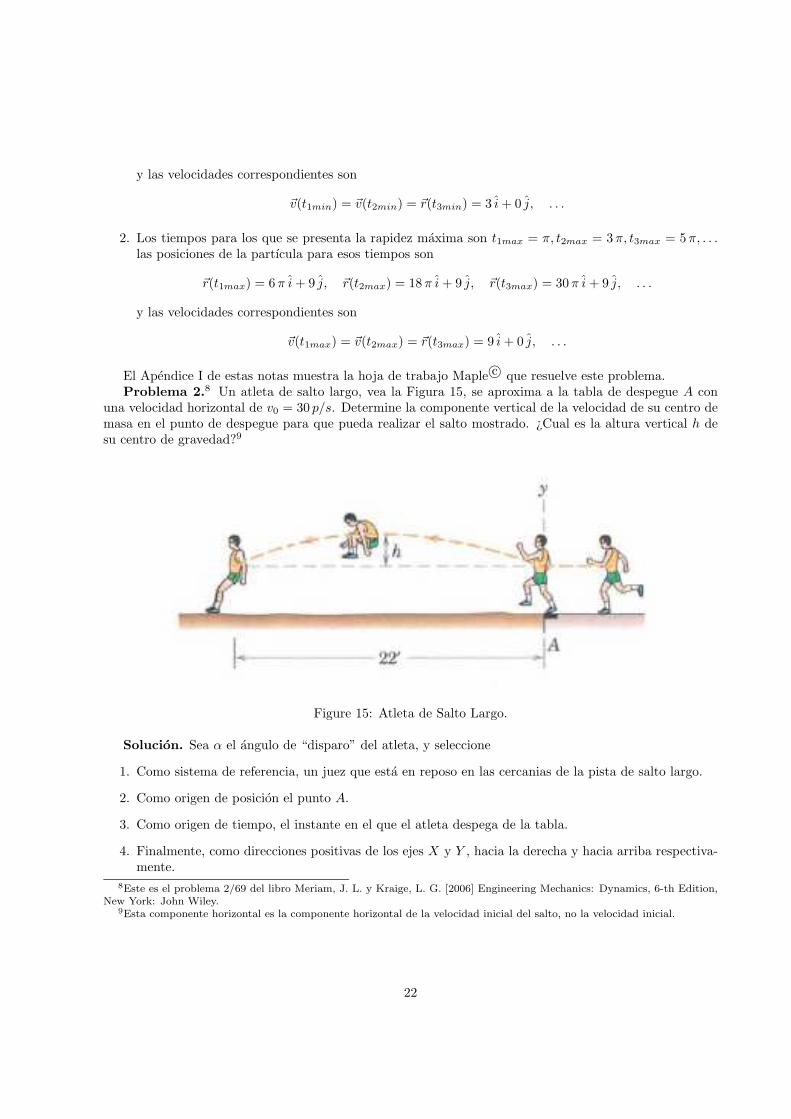
El Apendice I de estas notas muestra la hoja de trabajo Maple c© que resuelve este problema.Problema 2.8 Un atleta de salto largo, vea la Figura 15, se aproxima a la tabla de despegue A con
una velocidad horizontal de v0 = 30 p/s. Determine la componente vertical de la velocidad de su centro demasa en el punto de despegue para que pueda realizar el salto mostrado. ¿Cual es la altura vertical h desu centro de gravedad?9
Figure 15: Atleta de Salto Largo.
Solucion. Sea α el angulo de “disparo” del atleta, y seleccione
1. Como sistema de referencia, un juez que esta en reposo en las cercanias de la pista de salto largo.
2. Como origen de posicion el punto A.
3. Como origen de tiempo, el instante en el que el atleta despega de la tabla.
4. Finalmente, como direcciones positivas de los ejes X y Y , hacia la derecha y hacia arriba respectiva-mente.
8Este es el problema 2/69 del libro Meriam, J. L. y Kraige, L. G. [2006] Engineering Mechanics: Dynamics, 6-th Edition,New York: John Wiley.
9Esta componente horizontal es la componente horizontal de la velocidad inicial del salto, no la velocidad inicial.
22

Bajo esas condiciones, las ecuaciones de movimiento del atleta son
~a(t) = −gj, donde g = 32.2 p/s.
sujetas a las condiciones iniciales, para t = 0,
~v = −v0 i + v0 tanαj, y ~r = 0i + 0j.
Integrando repetidamente y determinando las constantes de integracion, se tiene que
~v(t) = −v0 i + (v0 tanα − g t) j, y ~r(t) = −v0 ti +
(
v0 t tanα − 1
2g t2
)
j.
El tiempo para el cual el atleta toca nuevamente el piso, esta dada por la solucion de la siguientepregunta. ¿Para que tiempo t, la componente y de la posicion del atleta es nuevamente 0? Por lo tanto, esnecesario resolver, para t, la ecuacion
v0 t tanα − 1
2g t2 = 0 or t
(
v0 tanα − 1
2g t
)
= 0
Existen dos soluciones para esta ecuacion
t1 = 0 y t2 =2 v0 tanα
g.
Evidentemente el tiempo deseado es el segundo. Ahora nos preguntaremos, ¿Cual es el alcance horizontaldel atleta? Es decir trataremos de encontrar el valor de rx para t = 2 v0 tanα
g . Este valor esta dado por
rmax = rx
∣
∣
∣
t=2 v0 tanα
g
= −v0
2 v0 tanα
g= −2 v2
0 tanα
g= − v2
0 tanα
g
Puesto que se sabe que el “alcance” del atleta rmax = −22 p, considerando el signo apropiado, se tieneque
α =1
2tan−1
(−rmax g
v20
)
= 21.482◦
Por lo tanto, la componente vertical de la velocidad inicial del atleta esta dada por
v0y = v0 tanα = 11.8066 p/s.
La altura maxima del atleta se obtiene cuando la componente vertical de la velocidad sea nula; por lotanto, es necesario resolver la ecuacion
v0 tanα − g t = 0 o thmax =v0 tanα
g.
y la altura maxima esta dada por
hmax = ry
∣
∣
∣
t=v0 tan α
g
= v0
(
v0 tanα
g
)
tanα − 1
2g
(
v0 tanα
g
)2
=v20 tan2 α
2 g
=(30 p/s)2 tan2 21.482◦
2 (32.2 p/s2)= 2.16455 p.
23

Problema 3.10 El movimiento tridimensional de una partıcula se define mediante el vector de posicion~r = At cos(t)i + A
√t2 + 1j + B t sen(t)k donde ~r y t se expresan en pies y segundos, respectivamente.
Demuestre que la curva descrita por la partıcula se encuentra sobre el hiperboloide
( y
A
)2
−( x
A
)2
−( z
B
)2
= 1.
Para A = 3 y B = 1, determine a) las magnitudes de la velocidad y aceleracion cuando t = 0, b) el valormas pequeno de t para el cual los vectores de posicion y velocidad son perpendiculares entre si.
Solucion. Las componentes cartesianas del vector de posicion estan dadas por
x(t) = At cos(t) y(t) = A√
t2 + 1 z(t) = B t sen(t). (65)
Sustituyendo estas ecuaciones en la ecuacion del hiperboloide, se tiene que
( y
A
)2
−( x
A
)2
−( z
B
)2
=
(
A√
t2 + 1
A
)2
−(
At cos(t)
A
)2
−(
B t sen(t)
B
)2
=(
t2 + 1)
− t2 cos2 t − t2 sen2 t = t2 + 1 − t2(
cos2 t + sen2 t)
= t2 + 1 − t2 = 1. (66)
Por otro lado, la ecuacion de la velocidad esta dada por
~v(t) =d~r(t)
d t= (Acos t − At sen t) i +
At√t2 + 1
j + (B sen t + B t cos t) k. (67)
Por lo tanto, la ecuacion que determina cuando los vectores de posicion y velocidad son perpendicularesesta dada por
0 = ~r(t) · ~v(t)
=[
At cos(t)i + A√
t2 + 1j + B t sen(t)k]
·[
(Acos t − At sen t) i +At√t2 + 1
j + (B sen t + B t cos t) k
]
(68)
Si se sustituye A = 3 y B = 1 y se simplica la ecuacion, se tiene que
0 = −2 t[
4 cos (t) t sen (t) − 4 cos2 t − 5]
Evidentemente, una solucion es t = 0, para econtrar las restantes raices considera la grafica del terminorestante de la ecuacion para el rango −5 ≤ t ≤ 5 se muestra en la figura 16,
Puede probarse que las raices mas cercanas a t = 0 son t = ±3.818. Evidentemente el tiempo negativodebe desecharse pues las ecuaciones de movimiento deducidas son validas para t ≥ 0.
Problema 4.11. Un montanista planea saltar de A a B sobre una grieta, vea la Figura 17. Determineel mınimo valor de la velocidad inicial v0 y el valor correspondiente del angulo α para que el montanistaaterrice en B.
Solucion. En este problema usaremos una seleccion no convencional del origen del sistema coordenado,el punto O que coincide con el punto B. Las direcciones positivas estan indicadas en la Figura 17, y el origen
10Este es el problema 11.98 del libro Beer, F. P., Johnston, E. R. Jr. y Clausen, W. E. [2007], Mecanica Vectorial paraIngenieros: Dinamica, Ciudad de Mexico: Mc Graw Hill.
11Este es el problema 11.114 del libro Beer, F. P., Johnston, E. R. Jr. et al [2009], Vector Mechanics for Engineers, Staticsand Dynamics, Ninth Edition, New York: Mc Graw Hill
24

15
t
521 3−1−2
5
−4
10
−3−5
0
0
25
4
20
Figure 16: Grafica de la condicion de perpendicularidad.
de tiempo es cuando el montanista inicia el salto. Bajo estas condiciones, la aceleracion y sus condicionesiniciales estan dadas por
~a =d~v
d t=
d2 ~r
d t2= −gi (69)
Para t = 0 ~v(0) = v0 cos α i + v0 senα j (70)
Para t = 0 ~r(0) = r0x i + r0y j (71)
donde g = 9.81m/s2, r0x = −1.8m y r0y = 1.4m.Integrando las ecuaciones correspondientes y sustituyendo las constantes de integracion, se tiene que
las ecuaciones de movimiento son
~v(t) = v0 cos α i + (v0 senα − g t) j (72)
~r(t) = (r0x + v0 tcos α) i +
(
r0y + v0 t senα − 1
2g t2
)
j (73)
Aun cuando parezca extrano, primero determinaremos para que tiempo el montanista aterriza en B = O,es decir
Para que ta = ? r0x = 0
La respuesta es inmediata
ta = − r0x
v0cos α
Ahora deseamos que para ese tiempo ta, la distancia vertical sea la del punto B = O, es decir, para t = ta,ry(ta) = 0, por lo tanto
0 = r0y+v0 ta senα−1
2g t2a = r0y+v0
(
− r0x
v0cos α
)
senα−1
2g
(
− r0x
v0cos α
)2
= r0y−r0x senα
cosα− g r2
0x
2 v20cos2 α
25
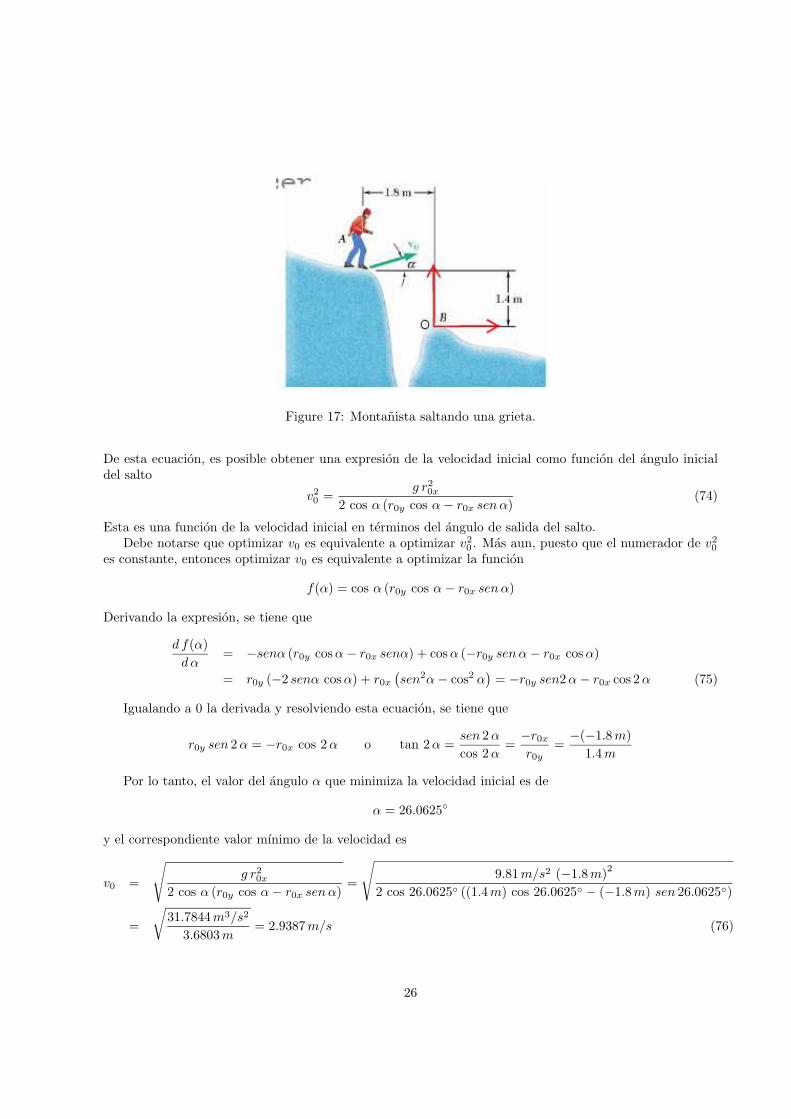
Figure 17: Montanista saltando una grieta.
De esta ecuacion, es posible obtener una expresion de la velocidad inicial como funcion del angulo inicialdel salto
v2
0 =g r2
0x
2 cos α (r0y cos α − r0x senα)(74)
Esta es una funcion de la velocidad inicial en terminos del angulo de salida del salto.Debe notarse que optimizar v0 es equivalente a optimizar v2
0 . Mas aun, puesto que el numerador de v20
es constante, entonces optimizar v0 es equivalente a optimizar la funcion
f(α) = cos α (r0y cos α − r0x senα)
Derivando la expresion, se tiene que
d f(α)
dα= −senα (r0y cos α − r0x senα) + cos α (−r0y senα − r0x cos α)
= r0y (−2 senα cos α) + r0x
(
sen2α − cos2 α)
= −r0y sen2α − r0x cos 2 α (75)
Igualando a 0 la derivada y resolviendo esta ecuacion, se tiene que
r0y sen 2α = −r0x cos 2 α o tan 2α =sen 2α
cos 2 α=
−r0x
r0y=
−(−1.8m)
1.4m
Por lo tanto, el valor del angulo α que minimiza la velocidad inicial es de
α = 26.0625◦
y el correspondiente valor mınimo de la velocidad es
v0 =
√
g r20x
2 cos α (r0y cos α − r0x senα)=
√
9.81m/s2 (−1.8m)2
2 cos 26.0625◦ ((1.4m) cos 26.0625◦ − (−1.8m) sen 26.0625◦)
=
√
31.7844m3/s2
3.6803m= 2.9387m/s (76)
26

Problema 5.12. Sabiendo que la velocidad del bloque B con respecto al bloque A es ~vB/A = 5.6m/s yforma un angulo de 70◦ con el semieje positivo X, determine las velocidades de A y B. Vea la Figura 18,donde θA = 30◦ y θB es una incognita.
Figure 18: Bloques conectados por una cuerda en planos inclinados.
Solucion. De la figura 18 se tiene que la longitud de la cuerda esta dada por
L = 2SA + 3SB + C
Derivando la ecuacion, se tiene que
2 vA + 3 vB = 0 por lo tanto vB = −2
3vA. (77)
Para mantener ambos angulos, θA, θB en el primer cuadrante, se cambiara la orientacion del plano inclinadodel cuerpo B como se indica en la parte derecha de la figura 18. Los vectores unitarios uA y uB en el sentidoopuesto a SA y SB estan dados por
uA = cos 30◦ i + sen 30◦ j ub =1 − x2
1 + x2i +
2x
1 + x2j
donde x ≡ tan θB
2.
Por lo tanto, las velocidades de los bloques A y B estan dadas por
~vA = −vA uA = −vA
(
cos 30◦ i + sen 30◦ j)
~vB = −vB uB = −vB
(
1 − x2
1 + x2i +
2x
1 + x2j
)
De manera que, sustituyendo la ecuacion (77)
~vB/A = 5.6m/s(
cos 70◦ i + sen 70◦ j)
= 1.915312801 i + 5.262278680 j
= ~vB − ~vA = −vB
(
1 − x2
1 + x2i +
2x
1 + x2j
)
+ vA
(
cos 30◦ i + sen 30◦ j)
=2
3vA
(
1 − x2
1 + x2i +
2x
1 + x2j
)
+ vA
(
cos 30◦ i + sen 30◦ j)
12Este es el problema 11.122 del libro Beer, F. P., Johnston, E. R. Jr. et al [2009], Vector Mechanics for Engineers, Staticsand Dynamics, Ninth Edition, New York: Mc Graw Hill
27
Igualando estos dos vectores, se obtiene un sistema no lineal de dos ecuaciones, con dos incognitas,vA, x.
1.9153128 =2
3vA
1 − x2
1 + x2+ 0.866025404 vA
5.262278678 = vA2x
1 + x2+ 0.5 vA
Resolviendo el problema por igualacion, se despejara la velocidad vA de las dos ecuaciones y se igualaran,de manera que
vA1 = 1436484600.01.0 + x2
1149519053.0 + 149519053.0x2= 31.57367207
1.0 + x2
8.0x + 3.0 + 3.0x2= vA2
Es facil observar que esta ecuacion tiene soluciones espurias que aparecen del factor comun 1 + x2. Lasolucion de esta parte de la ecuacion esta dada por ± i. Si se elimina esta parte innecesaria de la solucion,se tiene que la ecuacion final, en terminos de x, esta dada por
4.114117476x2 − 114.918768x + 319.8508382 = 0
Las posibles soluciones de esta ecuacion son
x1 = 3.135168002, θ1 = 144.6185685◦. x2 = 24.79761920, θ2 = 175.3814314◦.
Finalmente, se verificara que ambas soluciones son validas.
1. Caso 1. θ1 = 144.6185685◦, de manera que el angulo original esta dado por θB1 = 180◦ −144.6185685◦ = 35.3814315◦. Las velocidades de los cuerpos estan dados por
vA = 5.939290599m/s vB = −3.959527066m/s
De manera que los vectores velocidad estan dados por
~vA = −5.143576540 i − 2.969645300 j ~vB = −3.228263739 i + 2.292633380 j
y la velocidad del bloque B respecto a un sistema de referencia sujeto a traslacion con el movimientodel bloque A esta dado por
~vB/A = ~vB − ~vA = 1.915312801 i + 5.262278680 j
Este calculo verifica la solucion del problema.
2. Caso 2. θ1 = 175.3814314◦, de manera que el angulo original esta dado por θB1 = 180◦ −175.3814314◦ = 4.6185686◦. Las velocidades de los cuerpos estan dados por
vA = 9.504165360m/s vB = −6.336110240m/s
De manera que los vectores velocidad estan dados por
~vA = −8.230848646 i − 8.230848646 j ~vB = −6.315535845 i + 0.5101960102 j
y la velocidad del bloque B respecto a un sistema de referencia sujeto a traslacion con el movimientodel bloque A esta dado por
~vB/A = ~vB − ~vA = 1.915312801 i + 5.262278680 j
Este calculo verifica tambien la solucion del problema.
28

Figure 19: Bloques conectados por una cuerda.
Problema 6.13. Sabiendo que en instante mostrado el bloque A tiene una velocidad de 8 in/s y unaaceleracion de 6 in/s2 ambas dirigidas hacia abajo del plano inclinado, determine (a) la velocidad del bloqueB, (b) la aceleracion del bloque B. Vea la Figura 19.
Solucion. Note la definicion de las direcciones positivas de las posiciones de los bloques B y A, noteademas que el bloque B se desliza sobre el bloque A. En particular, en la parte de la cuerda que correspondeal plano inclinado entre los bloques A y B debe notarse que por cada unidad de longitud que se desplaza elbloque B, el bloque A se desplaza cos 15◦ = 0.9659u.l.. La ecuacion de la longitud de la cuerda esta dadapor
L = 2SA + SB/A + C
Por lo tanto, las ecuaciones que relacionan las velocidades y aceleraciones de los cuerpos estan dadas por
0 = 2 vA + vB/A y 0 = 2 aA + aB/A
Puesto que por definicionvA = +8 in/s aA = +6 in/s2
Se tiene quevB/A = −2VA = −16 in/s aB/A = −2 aA = −12 in/s2
Los vectores unitarios en la direccion positiva de las direcciones de sA y sB/A estan dadas por
uA = Cos 25◦i − Sen 25◦j = 0.9063 i − 0.4226 j uB/A = Cos 40◦i − Sen 40◦j = 0.7660i − 0.6427 j
Por lo tanto~vA = 7.2504 i − 3.3809 j ~aA = 5.4378 i − 2.5357 j
y~vB/A = −12.2567 i + 10.2846 j ~aB/A = −9.1925 i + 7.7134 j
Finalmente, se tiene, empleando una notacion simplificada, que
~vB = ~vA + ~vB/A =(
7.2504 i − 3.3809 j)
+(
−12.2567 i + 10.2846 j)
= −5.0063 i + 6.9037 j = 8.5278 in/s θ = 125.948◦A partir del semieje positivo X.
13Este es el problema 11.123 del libro Beer, F. P., Johnston, E. R. Jr. et al [2009], Vector Mechanics for Engineers, Staticsand Dynamics, Ninth Edition, New York: Mc Graw Hill
29

y
~aB = ~aA + ~aB/A =(
5.4378 i − 2.5357 j)
+(
−9.1925 i + 7.7134 j)
= −3.7547 i + 5.1777 j = 6.3958 in/s2 θ = 125.948◦A partir del semieje positivo X.
Problema 7.14. La antena de radar en P sigue un avion jet A que esta volando horizontalmente a unavelocidad u y una altitud h por arriba del nivel de P . Determine las expresiones para las componentes dela velocidad en coordenadas esfericas asociadas al movimiento de la antena.
Solucion: La velocidad del avion A esta dada por
~vA = u i
Pero, de los apuntes se tiene que el vector unitario i esta dada por
i = senφ cos θ er − sen θ eθ + cos φ cos θ eφ
Por lo tanto~vA = u i = u (senφ cos θ er − sen θ eθ + cos φ cos θ eφ)
De manera que las componentes de la velocidad en las componentes esfericas esta dada por
vr = u senφ cos θ vθ = −u sen θ vφ = u cos φ cos θ
7 Apendice A. Una derivacion alternativa de las derivadas de los
vectores unitarios asociados a las coordenadas cilındricas.
En este apendice se mostrara una forma mas rudimentaria pero quizas mas simple que la mostrada en elcuerpo principal de estas notas, considere la figura 20.
Para el vector unitario radial, er, se tiene que
d er
d t= Lim∆ t→0
er(t + ∆ t) − er(t)
∆ t= Lim∆ t→0
∆er
∆ t,
La magnitud de la derivada esta dada por∣
∣
∣
∣
d er
d t
∣
∣
∣
∣
= Lim∆ t→0
| er | ∆ θ
∆ t= Lim∆ t→0
| 1 | ∆ θ
∆ t= Lim∆ t→0
∆ θ
∆ t=
d θ
d t= θ.
Mientras que la direccion y sentido es el de eθ. Por lo tanto
˙er =d er
d t= θ eθ. (78)
De manera semejante, para el vector unitario transversal, eθ, se tiene que
d eθ
d t= Lim∆ t→0
eθ(t + ∆ t) − eθ(t)
∆ t= Lim∆ t→0
∆eθ
∆ t,
La magnitud de la derivada esta dada por∣
∣
∣
∣
d eθ
d t
∣
∣
∣
∣
= Lim∆ t→0
| eθ | ∆ θ
∆ t= Lim∆ t→0
| 1 | ∆ θ
∆ t= Lim∆ t→0
∆ θ
∆ t=
d θ
d t= θ.
Mientras que la direccion y sentido es el de −er. Por lo tanto
˙eθ =d eθ
d t= −θ er. (79)
14Este es el problema 2/168 del libro Meriam J. L. y Kraige L. G. [2012], Engineering Mechanics, Dynamics, SeventhEdition, New York: John Wiley and Sons
30
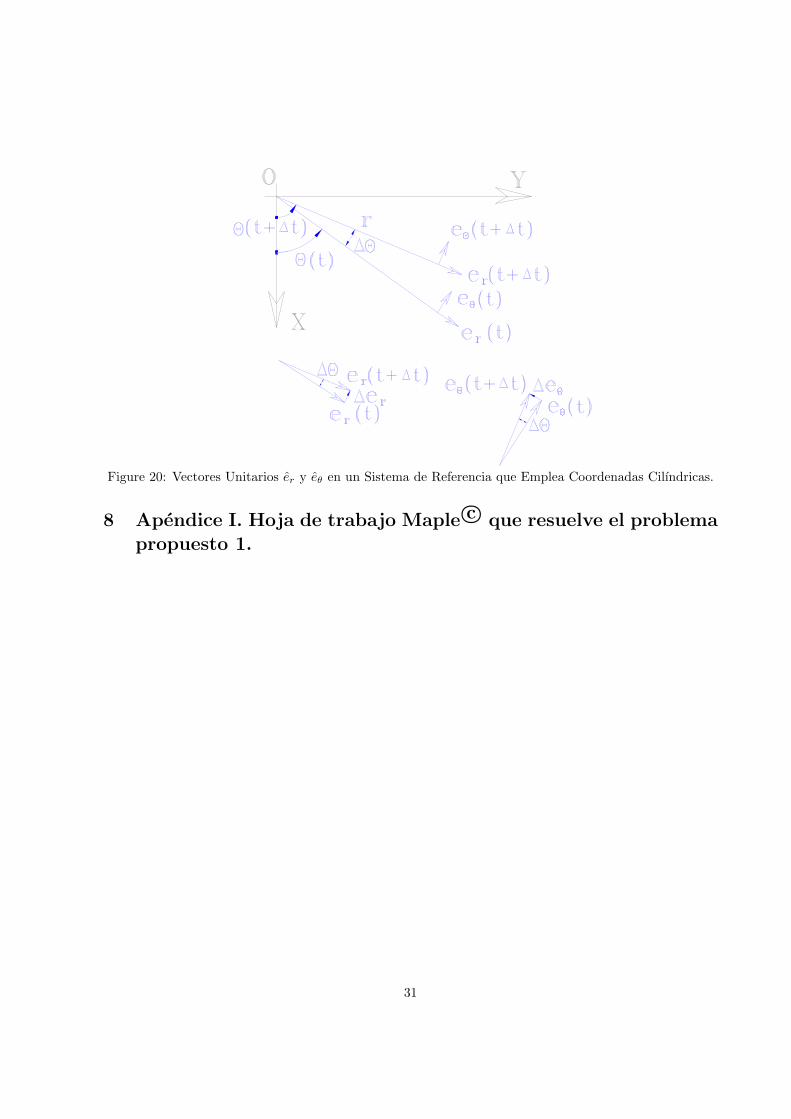
Figure 20: Vectores Unitarios er y eθ en un Sistema de Referencia que Emplea Coordenadas Cilındricas.
8 Apendice I. Hoja de trabajo Maple c© que resuelve el problema
propuesto 1.
31
4
x, m.
8
500
6y, m.
7525 100
0
t, s.151050
x, m.
100
50
Componente x de la Trayectoria de la particula
8
15100
6
5
4
y, m.
t, s.
Componente y de la Trayectoria de la particula