CAPÍTULO IV FASE 1: DEFINICION DE LAS ESPECIFICACIONES
14
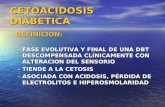
CAPÍTULO IV Los resultados de la investigación se basan en la aplicación de las fases de la metodología según “María José Angulo” en su Libro Robótica práctica. FASE 1: DEFINICION DE LAS ESPECIFICACIONES La presente investigación abarca los procesos concernientes al desarrollo de un prototipo de radar ultrasónico para la obtención de información en tres dimensiones, constituido a partir de una plataforma de radar adaptada, basándose en métodos de tipos de radar existente el cual será capaz de detectar, y mostrar los objetos de su entorno. El prototipo consta de un Sensor (Sound Navigation and Ranging) ubicado en una plataforma, un Software, utilizando técnicas de programación, según las teorías de los radares para efectos de visión y captación, un Hardware constituido por: PC, Interfaz de comunicación PIC, Motores paso a paso, y un sensor ultrasonido. Las principales herramientas utilizadas en esta tecnología son: Los microcontroladores de la familia PIC16CXX, sensor infrarrojo, los motores paso a paso y un sensor transductor de ultrasonido; en la figura 21 se muestra el esquema básico del prototipo. 94
Transcript of CAPÍTULO IV FASE 1: DEFINICION DE LAS ESPECIFICACIONES

CAPÍTULO IV
Los resultados de la investigación se basan en la aplicación de las
fases de la metodología según “María José Angulo” en su Libro Robótica
práctica.
FASE 1: DEFINICION DE LAS ESPECIFICACIONES
La presente investigación abarca los procesos concernientes al
desarrollo de un prototipo de radar ultrasónico para la obtención de
información en tres dimensiones, constituido a partir de una plataforma de
radar adaptada, basándose en métodos de tipos de radar existente el cual
será capaz de detectar, y mostrar los objetos de su entorno.
El prototipo consta de un Sensor (Sound Navigation and Ranging)
ubicado en una plataforma, un Software, utilizando técnicas de
programación, según las teorías de los radares para efectos de visión y
captación, un Hardware constituido por: PC, Interfaz de comunicación PIC,
Motores paso a paso, y un sensor ultrasonido. Las principales herramientas
utilizadas en esta tecnología son: Los microcontroladores de la familia
PIC16CXX, sensor infrarrojo, los motores paso a paso y un sensor
transductor de ultrasonido; en la figura 21 se muestra el esquema básico del
prototipo. 94

95
FIGURA 21: ESQUEMA BASICO DEL PROTOTIPO
FUENTE: Cañizales y Navarro
El fundamento principal del prototipo esta basado en los principios de
la teoría de los radares como es la ubicación y captación de la distancia a
que se encuentra los objetos en el medio, en el caso que nos ocupa, el
objeto es reflejado en el PC, basándose su configuración geométrica en las
tres coordenadas, las cuales nos permiten apreciarlos en sus tres
dimensiones. Se utiliza el reconocimiento por etapas según la matriz de
puntos que se muestra en la pantalla.
A través de el programa control, realizado en Q-Basic, se realizan una
serie de movimientos operados por dos motores paso a paso, el motor 1,
permite hacer un giro de 48.6 grados a la derecha y 48.6 grados a la
izquierda para un rango de 97.2 grados, el motor 2 donde esta ubicado el
sensor ultrasónico le permite girar 52.5 grados en la coordenadas y, provee
PC INTERFAZ DE
COMUNICACIÓN PIC
MOTORES 1,2 PASO A PASO Y LOS SENSORES
INFRARROJO 1,2
SENSOR ULTRASONIDO

96
un movimiento de arriba hacia abajo, cuando el sensor emite el sonido indica
la distancia a la que se encuentra el objeto, esta señal se refleja en la
pantalla en forma de puntos en las coordenadas respectivas, después de
obtener una matriz de punto se aplica una evaluación de distancia en cada
punto, para el caso de la toma de decisiones de cada punto, se clasifican los
puntos con mayor o menor distancia sensada, luego por medio de la unión
de puntos se realiza una evaluación en cuanto a la certeza de la medición y
configuración geométrica del objeto, a menor distancia existe mayor
concentración de puntos los cual nos indica mayor precisión del objeto, a
diferencia que cuando existe mayor distancia, existe mas dispersión de los
puntos lo que indica menor posibilidad de la configuración geométrica de los
objetos.
La conformación del Hardware es un instrumento de apoyo del
Software, para poder obtener la información se requiere del ambiente y su
respectiva evaluación. Esta información del medio se obtiene a través del
transductor ultrasónico, motores paso a paso , sensores ultrasónicos y un
PIC16C711 los que conforman al Hardware mostrándose el prototipo en
forma completa en el anexo 4.
FASE 2: ESQUEMA GENERAL DE HARDWARE.
En esta fase se define, la operatividad del sistema mediante el
diagrama del bloque que se muestra en la figura 22.

97
FIGURA 22: ESQUEMA GENERAL DEL HARDWARE
FUENTE: Cañizales y Navarro
El PC envía información a través de la interfaz de comunicación MAX-
232 que convierte esta señal de TTL a RS-232 (voltajes que van desde 0 a
12 voltios y la convierten de 0 a 5 voltios y viceversa), lo cual es recibido por
el PIC16C711, que permite controlar los procesos de todo el prototipo,
mediante entradas analógicas y digitales, la cual envía la información a las
salidas de potencia, trabajando esta con 12 voltios para que se entregue la
potencia a los motores paso a paso. El motor 1 esta controlado por un PIC y
PC
INTERFAZ MAX-232
PIC16C711 SALIDA DE POTENCIA
MOTOR 1
MOTOR 2
SENSOR INFRARROJO
1
SENSOR INFRARROJO
2
SENSOR DE ULTRASONIDO

98
el sensor Infrarrojo 1, ubica la posición 0, el motor 2 también controlado por
el PIC y un sensor infrarrojo 2 el cual tiene acoplado el sensor de
ultrasonido que envía la señal al PIC, y luego es enviado a la interfaz MAX-
232, y esta es recibida por el PC, por medio del puerto DB-9, donde el
programa de control Q-Basic grafica el objeto.
La Interfaz MAX-232 lleva los niveles de voltaje de -12 a 12 voltios a
un rango de 0 a 5 voltios que pueden ser soportados por el PIC y viceversa
para poder ser traducido por el puerto RS-232 en el PC. Esto muestra en la
figura 23.
Figura 23: La Interfaz max-232
Fuente: Cañizales y Navarro (2000)
El PIC16C711 trabaja con señales analógicas y digitales que envían y
reciben la información como función de transmisión y recepción entre los
elementos, además, controla los 2 motores, los sensores de ultrasonidos y
los sensores infrarrojo, que se muestran en la figura 24.

99
Figura 24: El microcontrolador PIC
Fuente: Cañizales y Navarro
El motor 1 ubicado en la torre, tiene un voltaje de 12 voltios y un giro
de 48.6 grados a la derecha y 48.6 grados a la izquierda par un total de 97.2
grados de giro, 27 pasos considerando que cada uno de estos pasos, posee
un desplazamiento angular de 3.6 grados y con un movimientos en las
coordenadas X, y posee un sensor infrarrojo que le permite establecer el
inicio del mismo, se muestra en la figura 25.
Figura 25: El Motor 1 inferior con su Sensor
Fuente: Cañizales y Navarro (2000)

100
El motor 2, ubicado en la torre, con un voltaje de 12V y un giro de
52.5 grados, desde un punto hacia abajo, para generar 28 pasos y esta
acoplado con dos engranajes, el primero con 10 dientes el otro con 40
dientes, lo que permite que la relación de vueltas resultante, produzcan un
giro de 25 grados del sensor de arriba hacia abajo, para ubicarse en las
coordenadas Y, se muestra el motor 2 en la figura 26.
Figura 26: El Motor 2 Superior con su Sensor
Fuente: Cañizales y Navarro (2000)
El Sensor Infrarrojo, permite la ubicación del punto de inicio de los
dos motores, el sensor 1 envía la señal y es recibida por el PIC en la entrada
digital 0-1 y el sensor 2 envía la señal al PIC por la entrada analógica,
ambos sensores tiene un voltaje de 5V, se muestran en la figura 27 los dos
sensores.

101
Figura 27: Sensores Posición de Inicio
Sensor del motor 1 Sensor del motor
Fuente: Cañizales y Navarro
El Sensor Ultrasónico, trabaja con una onda de sonido como señal,
que se va emitiendo al ambiente, y la cual se medición se hace usando el
tiempo que tarda la señal en ir y volver.
Este dispositivo esta diseñado para llevar la información de respuesta
en un rango de 0 a 12 voltios, los datos analógicos obtenidos por el circuito
de control son traducidos para ser llevados a datos aptos para el PC, se
muestra en la figura 28, el cual muestra el circuito controlador del radar (Ver
anexo N° 5).

102
Figura 28: Sensor y Circuito Control
Sensor de sonido Circuito controlador
Fuente: Cañizales y Navarro
FASE 3: ORDINOGRAMA GENERAL
Implica el diagrama de flujo general que define la operación del
sistema, este se muestra en el anexo 1 conteniendo la programación del PIC
y del programa de control principal.
FASE 4: ADAPTACIÓN ENTRE LAS FASES DEL HARDWARE Y EL
SOFTWARE.
El hardware utilizado esta dividido en las partes siguientes:
Ø Hardware de control, constituido por el microcontrolador
PIC16C711 y los motores paso a paso.

103
Ø Hardware de comunicación, constituido por un sensor de
ultrasonido y una interfaz de comunicación.
El soporte del software:
Ø Un lenguaje de alto nivel Q-BASIC.
Ø Lenguaje ensamblador característico de los
microcontroladores PIC: M PLAB
La relación del hardware y el software se constituye por medio de un
diseño de una interfaz capaz de trabajar con voltaje TTL y analógico en un
rango entre 0 y 12V por medio del programa que esta conformado en
MAPLAB de microchip para generar el programa estructurado del
PIC16C711.
Esta estructura de desarrollo provee una herramienta de bajo costo
para evaluar el sistema, prototipos basados en el microcontrolador
PIC16C711 que permite la compatibilidad entre el software y el hardware, es
el MPLAB que es un lenguaje ensamblador que permite codificar un
programa para ser grabado en la memoria de la familia de los
microcontroladores PIC16CXX.
Entre otras características de comunicación entre el hardware y el
software, es que se llevó a cabo un diseño de interfaz utilizando el puerto
serial del computador, compatible con el protocolo RS-232.

104
Es una característica típica de los microcontroladores PIC16C711 (con
ventana) que solo deben ser borradas un máximo de 5 a 6 veces para
agregar una integridad estructural en la arquitectura del CHIP a diferencia de
los PIC16F84 que pueden ser borrado mas de un millón de veces.
La comunicación entre el software, sensores y los motores se lleva a
cabo mediante un circuito electrónico de interfaz TTL-voltaje analógico, en un
rango de 0 a 12 voltios.
FASE 5: ORDINOGRAMAS MODULARES Y CODIFICACION DEL
PROGRAMA.
La codificación y modulación del programa esta divido en dos
programas el primero MPLAB, el cual permite el control y la comunicación
interna de todos los componentes del hardware, el segundo el programa Q-
Basic el control total de todo el prototipo, estos están especificados en el
anexo 2 y 3 los cuales son los programas principales.
FASE 6: IMPLEMENTACION DEL HARDWARE.
El Hardware que compone este sistema de interfaz del PC lleva la
información por el DB9 a la interfaz 232 que a su vez, es transmitida al
PIC16C711. Se puede señalar que el PIC16C711 recibe la información
tanto digital como analógica de todo el sistema del prototipo. El sensor
transductor de ultrasonido es un dispositivo que trabaja a una frecuencia de

105
50 Khz, y un voltaje de 12V en el cual recoge valores de distancia máxima
de 1.5 metros equivalentes a 60 pulgadas, su haz de sensibilidad es de 15
grados de apertura. Las mediciones de distancia se toman de acuerdo al
tiempo de respuesta de una señal emitida, luego esta es interpretada en un
rango de voltaje establecido, esta relación se efectúa de una manera directa.
Este sensor tiene una rapidez de 50 mseg, equivalente a 20 mediciones por
segundo.
FASE 7: DEPURACION DEL SOFTWARE.
En esta fase se hace referencia a los pasos de la metodología
planteada por Joyanes (1997), para el desarrollo de programas avanzados
Se considera el problema de la creación de un programa como solución.
Para la presente investigación las bases se enfocan en las características
que compone el período de movimiento, sensado en su forma tridimensional
lo cual debe ser simulado por el radar.
Luego de solucionar el problema se realizan las pruebas necesarias
del programa y corrección del mismo, se integró por completo en el hardware
y el software correcto.
FASE 8: INTEGRACION DEL HARDWARE CON EL SOFTWARE.
Consiste en poner a punto los programas y el conexionado del circuito.
Luego de realizar las pruebas necesarias de depuración y optimización del

106
programa se muestra que integra por completo con el hardware y el software,
conectando la interfaz de la computadora y probando la exactitud de la
comunicación entre el puerto DB9 a los diferentes componentes; sensores, y
motores. Estos se realiza de una manera concreta, donde al ejecutar un
programa principal y seleccionar las funciones que permiten ver el
funcionamiento del prototipo se observa el objeto en su forma geométrica en
la pantalla, obteniendo un buen resultado de funcionamiento.
DISCUSIÓN DE LOS RESULTADOS
Una vez culminado el presente proyecto de investigación, se obtuvo
un prototipo de sistema de radar ultrasónico para la obtención de información
de tres dimensiones estableciendo los resultados esperados, como lo fue la
captación de objetos en el medio, en sus tres dimensiones.
Este proyecto requirió de tiempo de investigación y una inversión,
además de los conocimientos e investigación en la materia que se trato,
sobre los principios y teorías del radar.
En cuanto al desarrollo del prototipo en relación al Hardware, se
utilizó el elemento electrónico de una tecnología actual y de vanguardia como
es el PIC16C711 y un sensor de ultrasonido, todo enfocado hacia la
conversión de datos digitales/analógicos y viceversa. El funcionamiento de
estos coincide con los datos que suministran el sensor ultrasónico para la
obtención y captación del objeto en tres dimensiones. La metodología

107
propuesta por José María Angulo, resultó ser óptima para llevar a cabo el
ensamblaje de todo el sistema donde solo se realizó 8 de las 9 fases que
propone el autor: Definición de las especificaciones del proyecto, Esquema
general del Hardware, Ordinograma general, Adaptación entre el Hardware y
el Software, Ordinograma Modular y codificación del programa,
Implementación del Hardware, Depuración del Software, Integración del
Hardware con el Software.
En utilización de la metodológica establecida para el diseño de los
programas Q-BASIC y MPLAB (bajo nivel para el PIC) se utiliza la propuesta
por el autor Joyanes (1997), en cuanto a la elaboración e implementación de
un sistema avanzado.