Billares - mat.izt.uam.mxmat.izt.uam.mx/mat/documentos/produccion_academica/2015/16/ASES… · de...
20
Billares Introducción. Cuando pensamos en billares, inmediatamente recurrimos al juego situado en una mesa de billar con bolas de billar, dicha mesa tiene bordes para permitirse los rebotes de las bolas impulsadas estas por un taco. Sin embargo, en el sentido matemático, cuando se estudian los billares se entiende como un sistema dinámico. Un sistema dinámico es un sistema físico cuyo estado evoluciona con el tiempo. Los billares tienen muchas aplicaciones dentro del área de la física, una de ellas, por ejemplo, es la de describir la dinámica de las partículas de los gases al estar éstas bajo una presión. Pensaremos el billar matemático como el movimiento de una masa puntual (un punto en el plano) que se encuentra dentro de una región acotada (un subconjunto de ℝ 2 ) que sigue una trayectoria inicial dada (velocidad). Podemos considerar este punto como el movimiento de una partícula. Cabe mencionar que existen algunas suposiciones sobre la idea del movimiento de la partícula: la primera es que “no hay fricción”, esto es, la partícula nunca se detiene, la trayectoria se sigue indefinidamente con la rapidez inicial constante; y la segunda suposición es que los “rebotes” con la frontera son elásticos, es decir, el ángulo de incidencia es igual al ángulo de reflexión. Los ángulos los mediremos en radianes, salvo que haya necesidad de hablar de ellos en grados. Cuando la partícula choca contra la frontera ésta entra con cierto ángulo y su rebote se sigue del mismo ángulo con la que entró formado éste con la tangente a la curva. Definición. Sea ⊆ ℝ 2 un conjunto abierto acotado y conexo, llamaremos a este conjunto mesa del billar. Ejemplos de mesas de billar: Billar cuadrado Billar circular Billar elíptico En general, una mesa de billar puede ser cualquier polígono regular, o cualquier curva cerrada que se pueda construir siempre que su frontera sea la unión finita de curvas compactas y suaves.
Transcript of Billares - mat.izt.uam.mxmat.izt.uam.mx/mat/documentos/produccion_academica/2015/16/ASES… · de...

Billares
Introducción.
Cuando pensamos en billares, inmediatamente recurrimos al juego situado en una mesa
de billar con bolas de billar, dicha mesa tiene bordes para permitirse los rebotes de las
bolas impulsadas estas por un taco. Sin embargo, en el sentido matemático, cuando se
estudian los billares se entiende como un sistema dinámico. Un sistema dinámico es un
sistema físico cuyo estado evoluciona con el tiempo. Los billares tienen muchas
aplicaciones dentro del área de la física, una de ellas, por ejemplo, es la de describir la
dinámica de las partículas de los gases al estar éstas bajo una presión.
Pensaremos el billar matemático como el movimiento de una masa puntual (un punto en
el plano) que se encuentra dentro de una región acotada (un subconjunto de ℝ2) que
sigue una trayectoria inicial dada (velocidad). Podemos considerar este punto como el
movimiento de una partícula. Cabe mencionar que existen algunas suposiciones sobre la
idea del movimiento de la partícula: la primera es que “no hay fricción”, esto es, la
partícula nunca se detiene, la trayectoria se sigue indefinidamente con la rapidez inicial
constante; y la segunda suposición es que los “rebotes” con la frontera son elásticos, es
decir, el ángulo de incidencia es igual al ángulo de reflexión. Los ángulos los mediremos en
radianes, salvo que haya necesidad de hablar de ellos en grados.
Cuando la partícula choca contra la frontera ésta entra con cierto ángulo y su rebote se
sigue del mismo ángulo con la que entró formado éste con la tangente a la curva.
Definición. Sea 𝑄 ⊆ ℝ2 un conjunto abierto acotado y conexo, llamaremos a este
conjunto mesa del billar.
Ejemplos de mesas de billar:
Billar cuadrado Billar circular Billar elíptico
En general, una mesa de billar puede ser cualquier polígono regular, o cualquier curva
cerrada que se pueda construir siempre que su frontera sea la unión finita de curvas
compactas y suaves.

Más ejemplos:
Estadio: Este billar es
una “combinación” del
billar cuadrado y del
billar circular.
Billar triangular
Billar en un polígono
hexagonal
Dinámica.
Denotaremos por 𝑞0 = (𝑢0, 𝑣0) ∈ 𝑄 como la posición inicial de la partícula con velocidad
𝑣 ∈ ℝ2.
Se mencionó los rebotes elásticos, entonces sea cualquier billar con curvas fronteras
suaves, al menos 𝐶2, y supongamos cualquier vector velocidad inicial 𝑣0 , la actualización
del vector velocidad, osea 𝑣1, viene siendo determinada por la siguiente fórmula
𝑣1 = 𝑣0 − 2⟨𝑣0, 𝑛(𝑞)⟩𝑛(𝑞)
Donde 𝑛(𝑞) es un vector normal a la curva frontera en el punto de incidencia, (donde la
partícula rebota). Esto se describe con el siguiente esquema.
La formula se obtiene de la siguiente manera:
𝑞0
𝑣0
𝑛(𝑞)
𝑣1
𝑙3Tangente a la
curva

Dado que 𝑛 es un vector normal a la curva, sea 𝜇 un vector perpendicular a 𝑛
entonces 𝜇 es el vector direccional de la recta tangente a la curva.
Como 𝜇 𝑦 𝑛 son perpendiculares, podemos escribir como combinación lineal a
𝑣0 = 𝛼𝜇 + 𝛽𝑛 … … … … … … … (1)
con 𝛼, 𝛽 constantes.
Cuando ocurre el rebote, se obtiene que 𝜇 se conserva y 𝛼 cambia de sentido ya que por
hipótesis los ángulos de reflexión son iguales a los de incidencia por lo tanto podemos
escribir a 𝑣1 en términos de 𝜇 𝑦 𝑛 de la siguiente forma:
𝑣1 = 𝛼𝜇 − 𝛽𝑛 … … … … … … … (2)
Hacemos producto punto la ecuación (1) con 𝑛
⟨𝑛. 𝑣0⟩ = 𝛼⟨𝜇. 𝑛⟩ + 𝛽⟨𝑛. 𝑛⟩
⟹ ⟨𝑛. 𝑣0⟩ = 𝛽 … … … … … … … (3)
La ultima igualdad se obtiene de tener a 𝑛 como un vector normal.
Reescribimos la ecuación (2)
𝑣1 = 𝑣0 − 2𝛽𝑛
Y sustituimos la ecuación (3) en la igualdad de arriba
𝑣1 = 𝑣0 − 2⟨𝑛. 𝑣0⟩𝑛 … … … … … (4
Ahora analicemos algunos billares en mesas particulares.
Billar cuadrado.
El billar cuadrado es considerado uno de los más simples y con el que muchos artículos
empiezan describiendo.
Cuando la partícula llega a un vértice la trayectoria termina, esto se debe a que en ese
punto no es posible determinar una tangente con la cual podamos decir cómo se
comportara la partícula después del rebote. En general supondremos que la posición
inicial de la partícula está sobre alguna curva frontera.

Este billar presenta algunas propiedades muy interesantes. La longitud de los lados del
cuadrado puede variar (puede ser un rectángulo) pero simplificaremos el caso a un
cuadrado unitario.
Sea 𝑄 = {(𝑥, 𝑦) ∈ ℝ2: 0 ≤ 𝑥, 𝑦 ≤ 1}
Tenemos trayectorias muy interesantes, resulta que desde cualquier punto 𝑞0 ∈ 𝑄 si el
vector velocidad es de la forma (±1, 0) ó (0, ±1) entonces se obtiene una “orbita
periódica de periodo dos”. Esto se ilustra a continuación:
La posición inicial es 𝑞0 = (1
5,
1
2) y 𝑣0 =
(1, 0), aunque no es notable el punto
inicial porque la trayectoria se sigue
indefinidamente por las hipótesis ya
mencionadas.
Aquí tenemos la partícula con la misma
posición inicial pero con 𝑣0 = (0, 1)
𝜋
2
𝜋
2

La actualización del vector velocidad viene dada por la ecuación (4).
Entonces sea 𝑣0 = (𝑎, 𝑏) el vector inicial, con el billar cuadrado, usemos como vectores
normales (±1, 0) ó (0, ±1) a cada frontera vertical y horizontal respectivamente. Si
suponemos que la trayectoria se dirige hacia un lado vertical; 𝑛(𝑞) = (1, 0)ó (−1, 0) y
𝑣1 = (𝑎, 𝑏) − 2⟨(1, 0). (𝑎, 𝑏)⟩(1, 0)
⟹ 𝑣1 = (𝑎, 𝑏) − 2𝑎(1, 0)
⟹ 𝑣1 = (−𝑎, 𝑏)
O en otro caso
𝑣1 = (𝑎, 𝑏) − 2⟨(−1, 0). (𝑎, 𝑏)⟩(−1, 0)
⟹ 𝑣1 = (𝑎, 𝑏) + 2𝑎(−1, 0)
⟹ 𝑣1 = (−𝑎, 𝑏)
Análogamente, para los rebotes con las fronteras horizontales usamos;
𝑛(𝑞) = (0, 1) ó (0, −1) y
𝑣1 = (𝑎, 𝑏) − 2⟨(0, 1). (𝑎, 𝑏)⟩(0, 1)
⟹ 𝑣1 = (𝑎, 𝑏) − 2𝑏(0, 1)
⟹ 𝑣1 = (𝑎, −𝑏)
O en otro caso
𝑣1 = (𝑎, 𝑏) − 2⟨(0, −1). (𝑎, 𝑏)⟩(0, −1)
⟹ 𝑣1 = (𝑎, 𝑏) + 2𝑏(0, 1)
⟹ 𝑣1 = (𝑎, −𝑏)
Por lo tanto denotamos 𝑣𝑡 = ((−1)𝑛𝑎, (−1)𝑚𝑏), donde 𝑛 es el número de rebotes con
las fronteras verticales y 𝑚 es el número de rebotes con las fronteras verticales. El
subíndice 𝑡 es debido a que la posición de la partícula y su velocidad dependen del
tiempo.
Si consideramos las orbitas que no se dirigen hacia un vértice y cuya velocidad es distinta
a las anteriores, obtenemos orbitas como se ilustran en seguida.

𝑞0 = (0.6, 0.1) 𝑦 𝑣0 = (1
2,
1
4). Se
muestran 5 rebotes.
Se mantienen constantes dos ángulos
que no necesariamente son iguales,
excepto en el caso de las orbitas
periódicas de periodo dos en el que los
ángulos son de 𝜋
2.
Más propiedades
Proposición: Sea 𝑣0 = (𝑎, 𝑏)
1. Si la trayectoria inicial tiene pendiente racional, es decir, si 𝑏/𝑎 ∈ ℚ entonces es
periódica.
2. Si la trayectoria inicial tiene pendiente irracional, es decir, si 𝑏/𝑎 ∉ ℚ, entonces es
densa.
Denso
La trayectoria se vuelve densa cuando ésta no es periódica, no se cierra y termina
“llenando todo el cuadro” si prolongáramos indefinidamente todos sus rebotes
marcándolas con líneas. Una muestra de esto se da a continuación.
𝑞0 = (0.6, 0.1) 𝑦 𝑣0 = (0.5, 𝜋) .
Se muestran 300 rebote.
𝜋
0.5∉ 𝑄
𝛼
𝛼
𝛼
𝛼
𝛽
𝛼
𝛽

El desdoblamiento (unfolding)
La trayectoria de la partícula dentro del billar cuadrado puede obtenerse con un
procedimiento muy usado en algunos billares poligonales- el desdoblamiento (unfolding)-
que consiste en continuar la trayectoria en línea recta como si la frontera desapareciera
momentáneamente. Haciendo además cuadrados adyacentes al cuadrado original. Los
rebotes de la partícula con las líneas verticales y horizontales que lo delimitan, son
resultado de reflejar la línea por ese lado.
𝑞0 = (0.2, 0.2) 𝑦 𝑣0 = (2, 1) . Se muestran 4 rebotes.
El cuadrado inferior izquierda es el billar original en
donde los rebotes se plasman con todas las hipótesis;
los otros cuadrados muestran el rebote reflejado por ese
lado.
Periodicidad
En este billar hay una forma de determinar la periodicidad de la trayectoria cuando esta es
cerrada, ya se ha dicho que para ello la pendiente de la trayectoria debe ser racional.
Siendo 𝑣0 = (𝑎, 𝑏) con 𝑏/𝑎 racional entonces la periodicidad de esta trayectoria inicial es
de 2(𝑎 + 𝑏).

Ejemplo:
𝑞0 = (1
5,
1
4) 𝑦 𝑣0 = (4, 3), como se
puede ver, los rebotes con un “costado”
vertical son 4 y por ambos son 8,
mientras que los rebotes con un lado
horizontal son tres y por ambos lados son
6, esto nos da un total de 14 rebotes con
las fronteras.
En la figura anterior aun no se cierra la
trayectoria pues la posición inicial no
está sobre la frontera, sin embargo, en el
rebote 15 se ve más claro cuando se
cierra.
Billar en un círculo.
Este billar aunque desde un principio lo estudiaremos completo, mas adelante veremos
cuando se estudie por sectores.
Sea 𝑄 = {(𝑥, 𝑦) ∈ ℝ2: 𝑥2 + 𝑦2 = 1}
El radio puede variar, pero usaremos el radio igual a uno.

Este billar presenta también órbitas periódicas de periodo dos, pero éstas existen si la
trayectoria inicial se dirige hacia el centro del billar (en este caso el origen). A diferencia
del billar cuadrado en las que éstas existen si el vector 𝑣0 es un vector normal a
cualesquiera de sus fronteras.
Por ejemplo:
𝑞0 = (0, 0) 𝑦 𝑣0 = (1, 1)
𝑞0 = (0, 0) 𝑦 𝑣0 = (−1, 1)
Los ángulos que se forman con la tangente a la curva en cada rebote son de 𝜋
2= 90°.
Esta orbita coincide con el diámetro de la circunferencia, por lo que entonces podemos
crear distintas trayectorias que reflejen el diámetro.
Por la simetría del circulo, encontramos diversas orbitas de periodo “n”, algunos ejemplos
de estos son todos los polígonos regulares inscritos en el circulo.
𝜋
2
𝜋
2
𝑣0 𝑣0

Tomemos como punto de referencia 𝑞0 = (−1, 0).
La recta tangente en el punto 𝑞0 coincide
con la recta 𝑥 = −1. Si el ángulo de
salida formado con ésta recta es de de 𝜋
3,
se obtiene una orbita de periodo 3
Si el ángulo formado entre la recta
tangente y el vector velocidad es de 𝜋
4
entonces se obtiene una órbita de
periodo 4.
Si el ángulo que se forma entre la
tangente y el vector velocidad es 𝜋
5
entonces se obtiene una orbita de
periodo 5.
𝜋
4
𝜋
3
𝜋
5
𝑣0
𝑣0
𝑣0

En este caso el ángulo formado entre la
recta tangente y el vector velocidad es de 𝜋
6.
En general para obtener estas orbitas cerradas que corresponden a los polígonos
regulares de n lados, debemos escoger un vector cuyo ángulo de salida formado con la
tangente sea de la forma 𝜋
𝑛, con 𝑛 ≥ 2.
A lo que nos lleva a la pregunta: ¿cómo debemos elegir 𝑣0?.
Con 𝑞0 = (−1, 0), veamos la siguiente figura
𝜃 es el ángulo que se forma con 𝑣0 y el
eje x, α es el ángulo formado entre la
recta tangente y 𝑣0, y 𝛽 es un ángulo que
complementa al triangulo formado si
uniéramos los puntos de rebote al centro
(como se muestra en la figura).
De la figura obtenemos las siguientes igualdades:
𝛼 + 𝜃 =𝜋
2
2𝜃 + 𝛽 = 𝜋
De esta dos ecuaciones nos lleva a encontrar que
𝛽 = 2𝛼
𝛽
𝜃 𝛼
𝜃
𝜋
6
𝑣0
𝑣0
𝑞0

Entonces dado un vector de salida 𝑣0, el ángulo 𝛽 determina una partición (hablando en el
sentido de los ángulos) de tamaño 2𝛼. Esto también nos dice que el circulo está siendo, de
cierta manera, “fragmentado” en 𝑛 sectores. Puesto que
2𝜋
𝛽=
2𝜋
2𝛼=
𝜋
𝛼=
𝜋𝜋𝑛
= 𝑛
Sea 𝑣0 = (𝑥, 𝑦) y tomemos (1, 0) como vector paralelo al eje x, entonces haciendo
producto punto
(𝑥, 𝑦). (1, 0) = ‖(1, 0)‖‖(𝑥, 𝑦)‖cos (𝜃)
que se reduce a
𝑥 = √𝑥2 + 𝑦2 cos(𝜃) … … … … … … … . (5)
También observamos que
0 ≤ 𝜃 ≤𝜋
2
⟹ 0 ≤ cos(𝜃) ≤ 1
Y elevamos ambos miembros al cuadrado de la ecuación (5).
𝑥2 = (𝑥2 + 𝑦2) cos2(𝜃)
⟹ 𝑥2(1 − cos2(𝜃)) = 𝑦2 cos2(𝜃)
Sustituimos 𝜃 en términos de 𝛼
⟹ 𝑥2(1 − cos2 (𝜋
2− 𝛼)) = 𝑦2(𝑐𝑜𝑠2 (
𝜋
2− 𝛼))
⟹ 𝑥2 (𝑠𝑒𝑛2 (𝜋
2− 𝛼)) = 𝑦2(cos2 (
𝜋
2− 𝛼))
⟹ 𝑦2 = 𝑡𝑎𝑛2(𝜋
2− 𝛼)𝑥2
Y como por ahora 𝛼 =𝜋
𝑛, entonces
𝑦2 = 𝑡𝑎𝑛2 (𝜋
2−
𝜋
𝑛) 𝑥2
Pero 𝑥 > 0, 𝑦 ≥ 0 & tan (𝜋
2−
𝜋
𝑛) ∈ [0, ∞) ∀𝑛 ≥ 2, y simplificamos la ecuación a
𝑦 = 𝑡𝑎𝑛 (𝜋
2−
𝜋
𝑛) 𝑥 … … … … … … … . (6)

Esta última ecuación representa a 𝑦 en función de 𝑥. Con 𝑛 ≥ 2 fija, podemos encontrar
distintos vectores que nos generen polígonos regulares de 𝑛 lados. Y de (6) concluimos
que
𝑣0 = (𝑥, 𝑡𝑎𝑛 (𝜋
2−
𝜋
𝑛) 𝑥) , 𝑛 ≥ 2, 𝑥 > 0 … … … … … . (7)
Más orbitas de periodo 𝑛
¿Qué sucede si eligiéramos 𝛼 de la forma
𝛼 =𝑚𝜋
𝑛?
El ángulo 𝛼 es un ángulo que varía de
0 ≤ 𝛼 ≤𝜋
2
Entonces elegir 𝑚 𝑦 𝑛 tal que 𝑚 > 𝑛 no es factible.
Enfoquemos entonces ahora en elegir 𝑚 ≤ 𝑛.
Si 𝑚 = 1, obtenemos las orbitas de periodo 𝑛 que corresponden a los polígonos regulares.
Si 𝑚 𝑦 𝑛 son tal que su 𝑚𝑐𝑑(𝑚, 𝑛) = 1 entonces obtenemos polígonos “estrellados”
Ejemplo:
Orbita de periodo 5. El ángulo que se
forma entre el eje x y la recta tangente es
de 2𝜋
5, en este caso 𝑚 = 2 𝑦 𝑛 = 5.
Esta es una trayectoria de periodo 7, el
ángulo de salida 𝛼 es de 2𝜋
7 y 𝜃 =
3𝜋
14
𝛼
2𝜋
5
𝜋
10 𝜃

En esta figura se muestra otra trayectoria
de periodo 7. 𝛼 =3𝜋
7 𝑦 𝜃 =
𝜋
14.
Y en ésta última, una trayectoria de
periodo 8, 𝛼 =3𝜋
7 𝑦 𝜃 =
𝜋
14.
La obtención de estas orbitas es consecuencia de generalizar la ecuación (7)
𝑣0 = (𝑥, 𝑡𝑎𝑛 (𝜋
2−
𝑚𝜋
𝑛) 𝑥) , 𝑐𝑜𝑛 𝑚𝑐𝑑(𝑚, 𝑛) = 1, 𝑚 < 𝑛 , 𝑥 > 0 … … … … … . (8)
Billar elíptico.
Describimos el billar elíptico como 𝑄 = {(𝑥, 𝑦) ∈ ℝ2 : (𝑥
𝑐)
2
+ (𝑦
𝑑)
2
= 1 𝑐𝑜𝑛 𝑐 ≠ 𝑑}
𝜃 𝛼
𝛼

Es claro que el caso 𝑐 = 𝑑 nos llevaría al caso del billar circular, además de que 𝑐 𝑦 𝑑 son
cualesquiera números positivos. Pongamos 𝑐 = 2 𝑦 𝑑 = 1 para ver algún ejemplo.
En este billar solo existen dos trayectorias que corresponden a órbitas de periodo 2. A
diferencia del billar circular en la que toda trayectoria inicial que se dirija al centro
corresponde a una órbita de periodo 2. Las ilustramos a continuación:
𝑞0 = (−2, 0)
y 𝑣0 = (1, 0)
𝑞0 = (0, 0) y
𝑣0 = (0, 1)
Más adelante hablaremos sobre la “estabilidad” de estas orbitas.
𝜋
2
𝜃
𝜋
2
𝑞0
𝑞0
𝑞0
𝜃

Una órbita de periodo 4 mostramos a continuación.
𝑞0 = (−2, 0)
𝑦 𝑣0 = (2, 1)
Orbitas de periodo tres.
Hallar estas orbitas no es tan sencillo como lo fue para las de periodo dos y cuatro, pero
aseguramos que estas existen en este billar.
Un intento por encontrar una órbita de periodo tres…
Con la intención de obtener una órbita de periodo tres, sugerimos plantear el problema
de la siguiente manera:
Sea (𝑥
𝑐)
2
+ (𝑦
𝑑)
2
= 1 la ecuación de la elipse, en general, y 𝑙1, 𝑙2 𝑦 𝑙3 rectas tangentes
distintas, a la elipse, como se muestra en el siguiente esquema
𝛾 + 𝜑 =𝜋
2
𝜑
𝛾
𝑞0
𝜃
𝜃
𝜑
𝛾

Los puntos de tangencia tienen coordenadas, supongamos, 𝐴 = (𝑥1, 𝑦1),
𝐵 = (𝑥2, 𝑦2) 𝑦 𝐶 = (𝑥3, 𝑦3)
Supongamos también que las rectas 𝑙1, 𝑙2 𝑦 𝑙3 tienen pendientes 𝑚1, 𝑚2 𝑦 𝑚3
respectivamente, entonces por ser tangentes a la elipse, la derivada en los puntos
𝐴, 𝐵 𝑦 𝐶 coincide con las pendientes de éstas y deducimos lo siguiente
𝑚1 = −𝑑2
𝑐2
𝑥1
𝑦1
𝑚2 = −𝑑2
𝑐2
𝑥2
𝑦2
𝑚3 = −𝑑2
𝑐2
𝑥3
𝑦3
Del esquema los segmentos 𝐴𝐵, 𝐵𝐶 𝑦 𝐶𝐴 determinan la trayectoria de la partícula, que
puede ser recorrida en cualquier sentido.
Sean tambien:
𝑙4 recta que pasa por los punto 𝐴 𝑦 𝐵 con pendiente 𝑚4
𝑙5 recta que pasa por los punto 𝐵 𝑦 𝐶 con pendiente 𝑚5 y
𝑙6 recta que pasa por los punto 𝐶 𝑦 𝐴 con pendiente 𝑚6.
Y expresamos estas pendientes en términos de las coordenadas de 𝐴, 𝐵 𝑦 𝐶
𝑚4 =𝑦2 − 𝑦1
𝑥2 − 𝑥1
𝑚5 =𝑦3 − 𝑦2
𝑥3 − 𝑥2
𝑚6 =𝑦3 − 𝑦1
𝑥3 − 𝑥1
A simple vista, esto parece describir una trayectoria triangular cualquiera que no
necesariamente es de billar por lo que necesitamos afinar algunos detalles para lograr que
ésta sea una cumpliendo todas las hipótesis mencionadas.
Para hacer esto posible establecemos las siguientes ecuaciones:
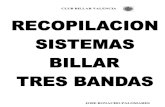
tan(𝛼) =𝑚1 − 𝑚4
1 + 𝑚1𝑚4=
𝑚6 − 𝑚1
1 + 𝑚1𝑚6
tan(𝛽) =𝑚4 − 𝑚2
1 + 𝑚2𝑚4=
𝑚2 − 𝑚5
1 + 𝑚2𝑚5
tan(𝛾) =𝑚3 − 𝑚6
1 + 𝑚3𝑚6=
𝑚5 − 𝑚3
1 + 𝑚3𝑚5
Como 𝐴, 𝐵 𝑦 𝐶 satisfacen la ecuación de la elipse tenemos por último las siguientes
igualdades:
𝑥12
𝑐2+
𝑦12
𝑑2= 1
𝑥22
𝑐2+
𝑦22
𝑑2= 1
𝑥32
𝑐2+
𝑦32
𝑑2= 1
Resumiendo todo lo anterior vemos que tenemos 12 ecuaciones con 12 incógnitas, un
sistema algo grande y quizás complicado de resolver. Aunque si de alguna manera
lográramos conocer los puntos 𝐴, 𝐵 𝑦 𝐶, en seguida tendríamos los valores de
𝑚4, 𝑚5 𝑦 𝑚6 ya que éstas están en función de las primeras y estaríamos reduciendo el
sistema a 9 ecuaciones.
Como se puede notar, el plantear de la misma manera este problema para hallar orbitas
de periodo 5 se estaría añadiendo a un sistema parecido al anterior otras 4 variables y 4
ecuaciones más lo que se obtendría un total de 16 ecuaciones con 16 incógnitas.
Sistemas de coordenadas en los billares.
Se establece un sistema de coordenadas (𝑠, 𝑝), donde 𝑠 es la longitud de arco alcanzado
de un rebote a otro medido desde un punto fijo, tomado como referencia, en el sentido
de las manecillas del reloj mientras que 𝑝 = cos (𝛼), donde 𝛼 es el ángulo formado por la
recta tangente a la curva y el vector de salida.
Ejemplo.
Fijamos un punto inicial que llamaremos 𝑠0 = 0 en la circunferencia de radio 1 con centro
en el origen, en este caso hemos elegido (1,0), y supondremos una velocidad inicial
𝑣0 = (𝑢0, 𝑤0).
En el punto (1, 0) la recta tangente es vertical por lo cual podemos usar como vector
direccional a (0, 1) y tenemos lo siguiente:

𝑝0 = cos(𝛼) =𝑣0. (0, 1)
‖𝑣0‖‖(0, 1)‖=
𝑤0
‖𝑣0‖
Esto se ilustra a continuación
En este punto hemos iniciado una trayectoria con coordenadas (𝑠0, 𝑝0) = (0,𝑤0
‖𝑣0‖),
Cuando ocurra el primer rebote tendremos lo siguiente

Las coordenadas de la partícula en este segundo rebote se obtienen calculando la longitud
de arco delimitada por los puntos 𝑠0 𝑦 𝑠1 (marcada de color rojo) y calculando cos (𝛽).
Existe otro sistema de coordenadas que solo emplea ángulos, es decir, denotamos las
coordenadas de los rebotes de la partícula como (𝛼, 𝜓) donde 𝛼 sigue siendo el ángulo
formado por la recta tangente y el vector de salida mientras que 𝜓 es el ángulo formado
por la recta tangente y el eje x.