Aumento de rendimiento en plantas termo-solares · Una central térmica solar o central termo-solar...
74
-
Upload
nguyencong -
Category
Documents
-
view
221 -
download
0
Transcript of Aumento de rendimiento en plantas termo-solares · Una central térmica solar o central termo-solar...

Aumento de rendimiento en plantas termo-solares mediante control predictivo
Eduardo Fernández Camacho
Departamento de Ingeniería de Sistemas y Automática Universidad de Sevilla
Camino de los descubrimientos s/n. 41092 Sevilla
Trabajo presentado a la novena edición del premio a la investigación Javier Benjumea Puigcerver
Catálogo Publicaciones – Universidad de Sevilla Colección: Premio Focus-Abengoa y Premio Javier Benjumea Puigcerver Número: 26 Catálogo Fundación Focus-Abengoa Colección Focus-Abengoa Número: 33 Reservados todos los derechos. Ni la totalidad ni parte de este libro puede reproducirse o transmitirse por ningún procedimiento electrónico o mecánico, incluyendo fotocopia, grabación magnética o cualquier almacenamiento de información y sistema de recuperación, sin permiso escrito del Secretariado de Publicaciones de la Universidad de Sevilla y de la Fundación Focus-Abengoa © Secretario de publicaciones de la Universidad de Sevilla 2013 Porvenir, 27 – 41013 Sevilla Tlfs.: 954 48 74 47 / 52; Fax: 954 487 443 Correo electrónico: [email protected] Web: http://www.publius.us.es © Fundación Focus-Abengoa 2013 Hospital de los Venerables Plaza de los Venerables, 8 – 41004 Sevilla Tfnos.: 954 56 26 96; 954 56 45 95 Correo electrónico: [email protected] Web: http://www.focus.abengoa.es © Eduardo Fernández Camacho. 2013 ISBN: 84-617-0821-0 Maqueta: Plural Asociados

Contenido
1. Introducción ..................................................................................................................................... 5
2. Tecnología termo-solar .................................................................................................................. 8
2.1. Concentradores solares de torre .............................................................................................. 9
2.2. Concentradores solares cilindro parabólicos ....................................................................... 12
2.3. Concentradores solares Fresnel .............................................................................................. 14
2.4. Concentradores solares de disco. ........................................................................................... 15
3. Control de sistemas de energía termo-solar. .......................................................................... 16
3.1. Control del campo ce colectores. ........................................................................................... 16
3.2. Control del sistema de generación......................................................................................... 17
3.3. El control de la producción. ..................................................................................................... 20
3.4. El control en las centrales de torres ....................................................................................... 23
3.5. Control del campo de colectores cilindro parabólicos. ...................................................... 26
4. Control predictivo basado en modelo. ..................................................................................... 31
4.1. Estrategia del Control Predictivo ............................................................................................ 34
5. Estrategía de control propuesta ................................................................................................. 39
5.1. Controlador N1: Planificador de la producción. .................................................................. 40
5.1.1. Optimización de la oferta al mercado ................................................................................ 42
5.1.2. Seguimiento de la potencia contratada. ............................................................................ 44
5.1.3. Minimización de las penalizaciónes. ................................................................................. 45
5.1.4. Optimización de la producción. ........................................................................................... 45
5.1.5. Estrategia combinada ........................................................................................................... 49
5.2. Controlador N2: Optimización de los puntos de funcionamiento .................................... 51
5.3. Controlador N3: Regulación ................................................................................................... 58
6. Referencias .................................................................................................................................... 63
7. Agradecimientos ........................................................................................................................... 68
8. Conclusiones .................................................................................................................................. 70


- 5 -
1. Introducción
La utilización de energías renovables sufrió un gran impulso después de la primera gran
crisis del petróleo debido a la fuerte subida de precios que sufrió el barril de petróleo y la
falta de garantías en el suministro debidos a las incertidumbres políticas de los países
productores. El interés decreció cuando los precios del petróleo volvieron a caer. El interés
por las energías renovables ha vuelto a surgir con mucha más fuerza debido a la necesidad
de reducir el alto impacto ambiental de los combustibles fósiles. Resolver el problema
energético es uno de los grandes desafíos que tiene la Humanidad que resolver en las
próximas décadas.
La fuente más abundante de energía es él sol, de el derivan la mayor parte de las energías
renovables como son la energía eólica, los biocombustibles y gran parte de las energías
marinas. El petróleo y carbón han sido generados a partir de la energía solar hace miles de
años. La potencia de las radiaciones solar es que alcanza la superficie terrestre es 86000 TW.
El 0.22% de la superficie de nuestro planeta con colectores solares que tuvieran una
eficiencia del 8% serían suficiente para satisfacer el consumo global. Se estima que
cubriendo un cuadrado de 160 km de lado con tecnología de concentración solar (CSP) en el
sur de EEUU bastaría para satisfacer la demanda energética de todos los Estados Unidos de
América. Prueba del impulso que la energía solar está teniendo en la actualidad es que el 3
de julio del 2010, el presidente Obama anunció desde el despacho oval de la Casa Blanca
que el departamento de Energía iba a otorgar casi 2000 M$ a dos compañías de energía
solar, una de ellas, Abengoa Solar, para edificar una de las plantas solares más grandes del
mundo en los Estados Unidos (White house, [2010]).

- 6 -
Los principales problemas de la utilización de la energía solar son la disponibilidad del
recurso energético y los costes de producción. La energía solar no siempre está disponible
cuando se necesita y donde se necesita y está sometida a variaciones diarias y estacionales.
Por otra parte, la energía solar tiene todavía mayores costes de producción que otras formas
de energía no renovables.
La reducción de los costes de la energía solar es uno de los desafíos ingenieriles para el siglo
21 recogidos por la U.S. National Academy of Engineering [2010]. Los costes de la energía
solar pueden disminuir reduciendo los costes de inversión y optimizando el funcionamiento
de los procesos para maximizar la producción de energía eléctrica. Este trabajo pretende
contribuir en esta última línea.
En la mayor parte de las plantas se pueden mantener unas condiciones de funcionamiento
para las que se puede calcular el punto óptimo de operación. En estas plantas, el punto
óptimo de operación se puede calcular de forma estática ya que las condiciones de
funcionamiento suelen cambiar con poca frecuencia. Este no es el caso de las plantas
termo-solares donde la radiación solar puede cambiar bruscamente por la presencia de
nubes y aún en días claros cambia continuamente a lo largo del día por la variación natural
de la radiación solar directa. Debido a estos cambios en la radiación solar, las condiciones
de funcionamiento están continuamente cambiando a lo largo del dia. El punto óptimo de
operación en cada momento depende no sólo de las condiciones ambientales sino también
del propio estado de la planta, de cómo esten de limpios los espejos o de cómo sea la
función de pérdidas térmicas debidas a las roturas o fallos de vacío en los tubos. La
optimización de la planta, para extraer la máxima cantidad de energía, ha de hacerse
necsariamente teniendo en cuenta un modelo dinámico de la misma. El objetivo de este
trabajo es poner de manifiesto cómo con la utilización de sistemas de control avanzado
basados en control predictivo se puede conseguir mejoras sustanciales en los rendimientos
de las plantas. El control predictivo ha sido utilizado con notable éxito en la industria del
petróleo, en las refinerias por procesos de gran consumo energético y procesos donde se
pueden conseguir grandes beneficios al aumentar un poco la eficiencia. Algo análogo ocurre
en los procesos donde la energía producida tiene gran valor, como es el caso de la energía

- 7 -
solar. El control predictivo puede ayudar a aumentar la producción de las plantas en las
formas siguientes:
1. Determinando los puntos óptimos de funcionamiento en cada instante, de forma
dinámica y teniendo en cuenta las condiciones ambientales y el estado en que se
encuentre la planta.
2. Manteneniendo la planta lo más cerca posible del punto de funcionamiento óptimo.
3. Permitiendo la operación mas eficiente y robusta en días de fuertes perturbaciones
en la radiación solar provocadas por el paso de nubes.
La energía solar está cobrando gran importancia en nuestro entorno socio-económico. Es
bien sabido que una empresa andaluza, Abengoa, se ha convertido en líder mundial en
energía solar. Uno de los centros de investigación termo-solar de referencia, la Plataforma
Solar de Almería, donde se han desarrollado y experimentado un gran número de sistemas
termo-solares se encuentran también en Andalucía. La potencia solar instalada en nuestra
región es ya significativa, con las primeras plantas comerciales de torres cercanas a Sevilla
(Sanlúcar la Mayor) y un número significativo de centrales cilindro parabólicas. Esto se
traduce en que el sector de la energía termo-solar es clave para nuestra economía. El sector
está generando un buen número de empleos directos e indirectos además de lo que supone
en mejoras mediambientales.
El reto para mantener la tecnología solar de nuestra región como líder en el mundo pasa por
el desarrollo de sistemas de captación y transformación de la energía solar cada vez más
eficientes que permitan extraer más energía.
El trabajo contribuye a resolver problemas de las empresas del sector mediante la
aplicación de innovaciones tecnológicas. La optimización del aprovechamiento de la energía
solar puede representar para una central de 50 MWe unos incrementos de producción de
varios miles de euros al día.
- 8 -
2. Tecnología termo-solar
La energía termo-solar, o energía solar térmica, consiste en el aprovechamiento de la
energía del Sol para producir calor que puede aprovecharse directamente para distintas
aplicaciones. Entre las aplicaciones de la energía solar térmica se puede mencionar el
calentamiento de agua destinada al consumo doméstico, ya sea agua caliente sanitaria,
calefacción, o la producción de vapor y, a partir de él, de energía eléctrica. También se ha
aplicado la energía solar térmica para alimentar a máquinas de refrigeración por absorción,
que emplean calor en lugar de electricidad para producir frío.
Una central térmica solar o central termo-solar es una central de producción de energía
eléctrica en la que, a partir del calentamiento de un fluido mediante radiación solar y su uso
en un ciclo termodinámico convencional, se produce la potencia necesaria para mover una
turbina y un generador que produce energía eléctrica como en una central térmica clásica.
Para poder alcanzar temperaturas suficientemente elevadas, de 300 º C hasta 1000 º C, y
obtener así un rendimiento aceptable en el ciclo termodinámico, es necesario concentrar la
radiación solar. La captación y concentración de los rayos solares se hace por medio de
espejos que apuntan de forma automática a una torre central donde se calienta el fluido, o
a un tubo mediante superficies reflectantes de geometría cilindro parabólica.
Se han ensayado distintos fluidos y ciclos termodinámicos que van desde el ciclo Rankine
(centrales nucleares, térmicas de carbón) hasta el ciclo Brayton (centrales de gas natural)
pasando por muchas otras variedades como el motor de Stirling. Las configuraciones más
utilizadas combinan la energía termo-solar con el gas natural.

- 9 -
Las plantas termo-solares pueden clasificarse de acuerdo al tipo de colectores solares
utilizados en:
• Concentradores centrales o de torre
• Concentradores cilindro parabólicos
• Concentradores Fresnel
• Concentradores de disco.
2.1. Concentradores solares de torre
Las centrales de torre consisten en a) un conjunto de espejos (heliostatos) que siguiendo el
movimiento del sol en dos ejes, concentran la radiación solar en un receptor situado en la
parte superior de una torre, b) el sistema de control del campo de heliostatos que tiene que
mantener constantemente la luz reflejada por cada uno de los espejos (heliostatos)
enfocadas en el receptor con independencia del movimiento del sol, c) el receptor donde
se transfiere el calor al fluido que transporta el calor recibido, que suele ser agua y d) el
sistema degeneración donde a patir de la energía solar recogida se produce el vapor que
genera electricidad al ser turbinado. En algunas centrales de torre, como la SSPS de la
Plataforma Solar de Almería se utilizó sodio líquido como fluido de evacuación y transporte
del calor generado.
- 10 -
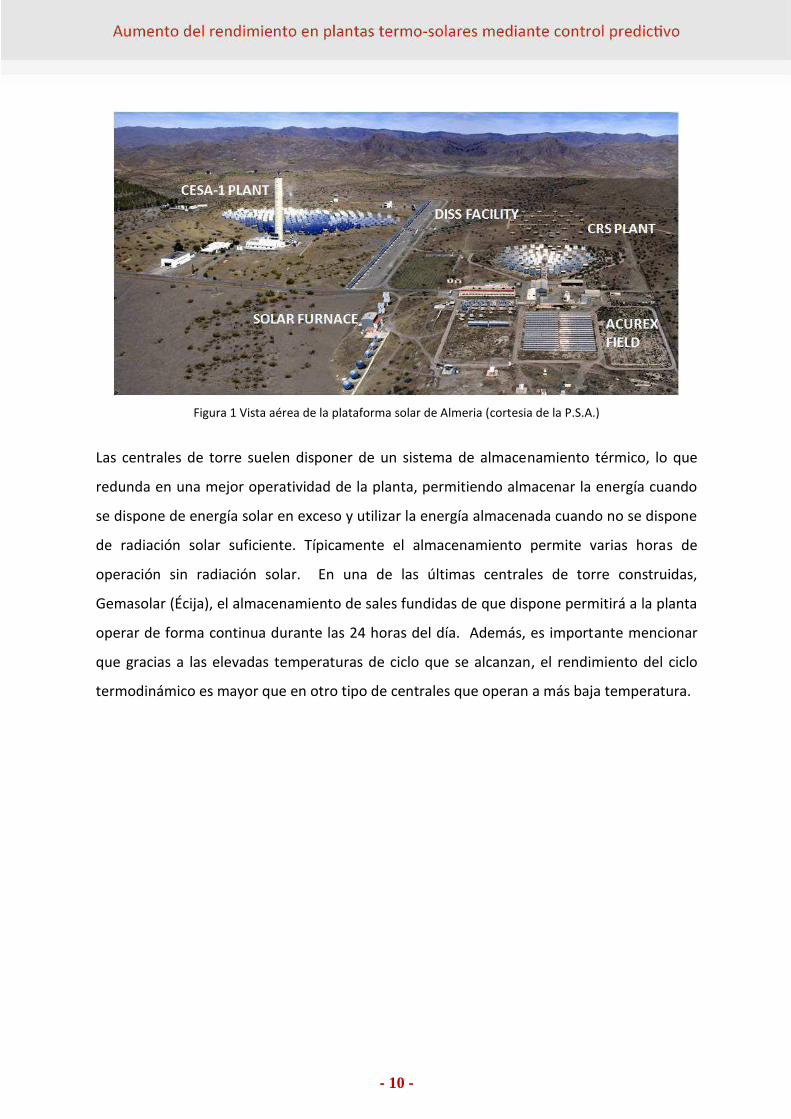
Figura 1 Vista aérea de la plataforma solar de Almeria (cortesia de la P.S.A.)
Las centrales de torre suelen disponer de un sistema de almacenamiento térmico, lo que
redunda en una mejor operatividad de la planta, permitiendo almacenar la energía cuando
se dispone de energía solar en exceso y utilizar la energía almacenada cuando no se dispone
de radiación solar suficiente. Típicamente el almacenamiento permite varias horas de
operación sin radiación solar. En una de las últimas centrales de torre construidas,
Gemasolar (Écija), el almacenamiento de sales fundidas de que dispone permitirá a la planta
operar de forma continua durante las 24 horas del día. Además, es importante mencionar
que gracias a las elevadas temperaturas de ciclo que se alcanzan, el rendimiento del ciclo
termodinámico es mayor que en otro tipo de centrales que operan a más baja temperatura.

- 11 -
Figura 2 Plantas termo-solares de torre PS10 y PS20 de Abengoa Solar
Entre las primeras centrales de torre se pueden citar a la SSPS y la CESA I de la Plataforma
sola de Almería y Solar One en EEUU. La primera planta termo-solar de torre comercial fue
la planta PS10 que está situada en Sanlúcar la Mayor, Sevilla, y tiene una potencia de 10
MW. La planta consta de 624 heliostatos y de una torre de 114 metros de altura, produce
una potencia de 10 MW y fue la primera de un conjunto de plantas solares que se
construyeron en el entorno para alcanzar una producción total de 300 MW para el año
2013. En la figura 2 se puede ver la PS10 junto a la PS20, más moderna con una potencia de
20 MW.
La planta solar, propiedad del Abengoa Solar, utiliza heliostatos suministrados por el propio
grupo de Abengoa. El receptor solar, consiste en una serie de paneles de tubos que operan a
muy alta temperatura y por los que circula agua a presión. El vapor que se produce en ellos
es almacenado parcialmente en unos tanques acumuladores para ser utilizado cuando no se
produce suficiente vapor, el resto, es enviado a una turbina de vapor para generar
electricidad. La planta está en operación comercial junto a la PS20 (figura 2) de 20 MW de
potencia y situada a su lado.

- 12 -
2.2. Concentradores solares cilindro parabólicos
En las plantas termo-solares cilindro parabólicas, la radiación solar directa es concentrada
por un espejo cilindro parabólico sobre unos tubos receptores localizados en la línea focal
del colector. Los receptores cilindro parabólicos siguen el movimiento del sol moviéndose
alrededor de un eje paralelo al tubo de forma que la radiación solar se refleje
constantemente sobre el tubo absolvedor (figura 3). Dentro del tubo circula un fluido
transmisor de calor, usualmente aceite sintético, que es calentado por los rayos solares
concentrados a una temperatura de aproximadamente 400ºC. El aceite caliente circula a
través de una serie de intercambiadores de calor para producir vapor. El vapor se envía a
una turbina para producir electricidad. El calor sobrante puede ser almacenado,
normalmente en depósitos de sales fundidas, y ser utilizado para generar electricidad
cuando no haya radiación solar suficiente.
Figura 3 Colectores cilindro parabólicos (Proyecto DISS, cortesía de la Plataforma Solar de Almería)
Un campo solar cilindro parabólico consta de los siguientes elementos:
El reflector cilindro parabólico que refleja los rayos solares sobre el tubo absolvedor
mediante un espejo que suele estar hecho con películas de plata o aluminio
depositadas sobre un soporte que le da la rigidez necesaria.
El tubo absolvedor consta de dos tubos concéntricos, uno metálico y el exterior de
cristal, separados entre los que se ha hecho el vacío. Por el tubo interior circula el
- 13 -
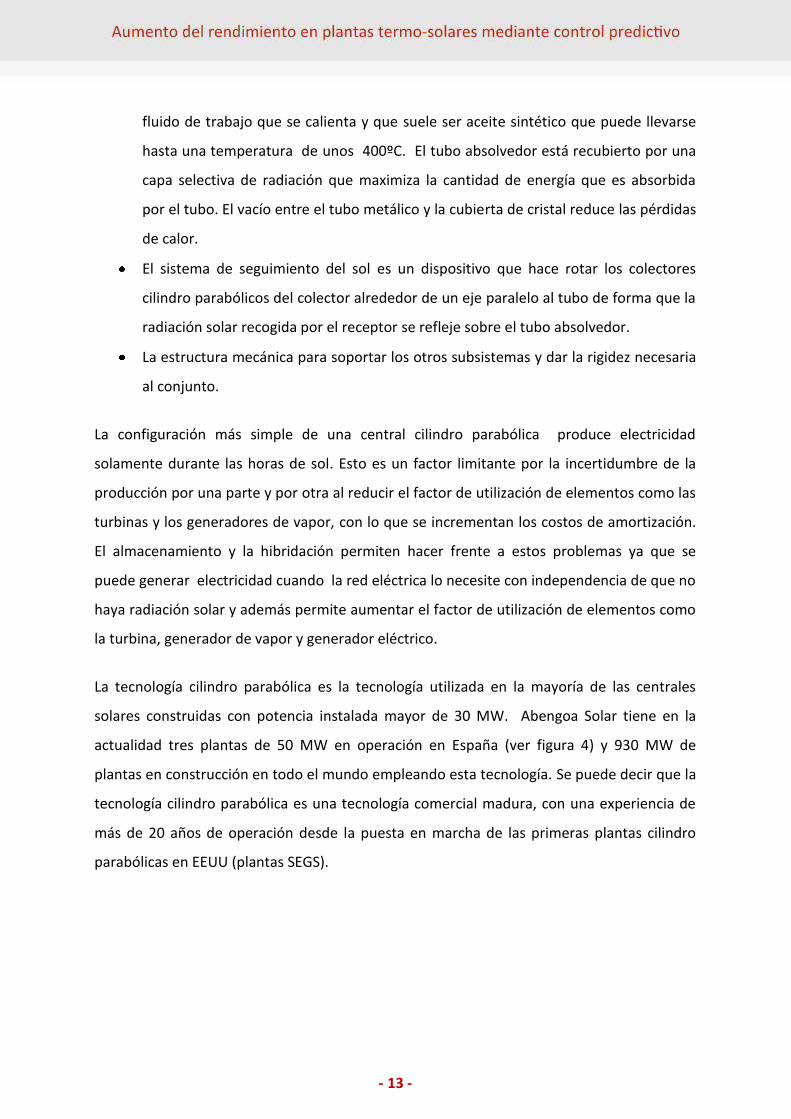
fluido de trabajo que se calienta y que suele ser aceite sintético que puede llevarse
hasta una temperatura de unos 400ºC. El tubo absolvedor está recubierto por una
capa selectiva de radiación que maximiza la cantidad de energía que es absorbida
por el tubo. El vacío entre el tubo metálico y la cubierta de cristal reduce las pérdidas
de calor.
El sistema de seguimiento del sol es un dispositivo que hace rotar los colectores
cilindro parabólicos del colector alrededor de un eje paralelo al tubo de forma que la
radiación solar recogida por el receptor se refleje sobre el tubo absolvedor.
La estructura mecánica para soportar los otros subsistemas y dar la rigidez necesaria
al conjunto.
La configuración más simple de una central cilindro parabólica produce electricidad
solamente durante las horas de sol. Esto es un factor limitante por la incertidumbre de la
producción por una parte y por otra al reducir el factor de utilización de elementos como las
turbinas y los generadores de vapor, con lo que se incrementan los costos de amortización.
El almacenamiento y la hibridación permiten hacer frente a estos problemas ya que se
puede generar electricidad cuando la red eléctrica lo necesite con independencia de que no
haya radiación solar y además permite aumentar el factor de utilización de elementos como
la turbina, generador de vapor y generador eléctrico.
La tecnología cilindro parabólica es la tecnología utilizada en la mayoría de las centrales
solares construidas con potencia instalada mayor de 30 MW. Abengoa Solar tiene en la
actualidad tres plantas de 50 MW en operación en España (ver figura 4) y 930 MW de
plantas en construcción en todo el mundo empleando esta tecnología. Se puede decir que la
tecnología cilindro parabólica es una tecnología comercial madura, con una experiencia de
más de 20 años de operación desde la puesta en marcha de las primeras plantas cilindro
parabólicas en EEUU (plantas SEGS).

- 14 -
Figura 4: Centrales cilindro parabólicas de Abengoa Solar (Sanlúcar la Mayor, Sevilla)
2.3. Concentradores solares Fresnel
Los colectores de tipo Fresnel (figura 5), reflejan la radiación solar directa sobre un tubo
absolvedor similar a los utilizados por los colectores cilindro parabólicos. El colector está
formado por una serie de facetas, ligeramente recanteadas, que se mueven individualmente
en un solo eje para enfocar continuamente los rayos solares sobre el tubo absolvedor. En la
figura 5 se muestra un colector Fresnel instalado en la Escuela Superior de Ingeniería de la
Universidad de Sevilla para un proyecto de refrigeración solar. Entre las ventajas de los
colectores Fresnel se pueden citar a) la ligereza de la estructura, b) una mayor
concentración que los cilindro-parabólicos y c) no requerir tuberías con partes móviles para
el fluido de trabajo. Como mayor inconveniente es que requiere un servomecanismo y su
dispositivo de control correspondiente para cada una de las facetas del campo.
Figura 5 Colectores Fresnel en la Escuela Superior de Ingeniería de la Universidad de Sevilla.
- 15 -
2.4. Concentradores solares de disco
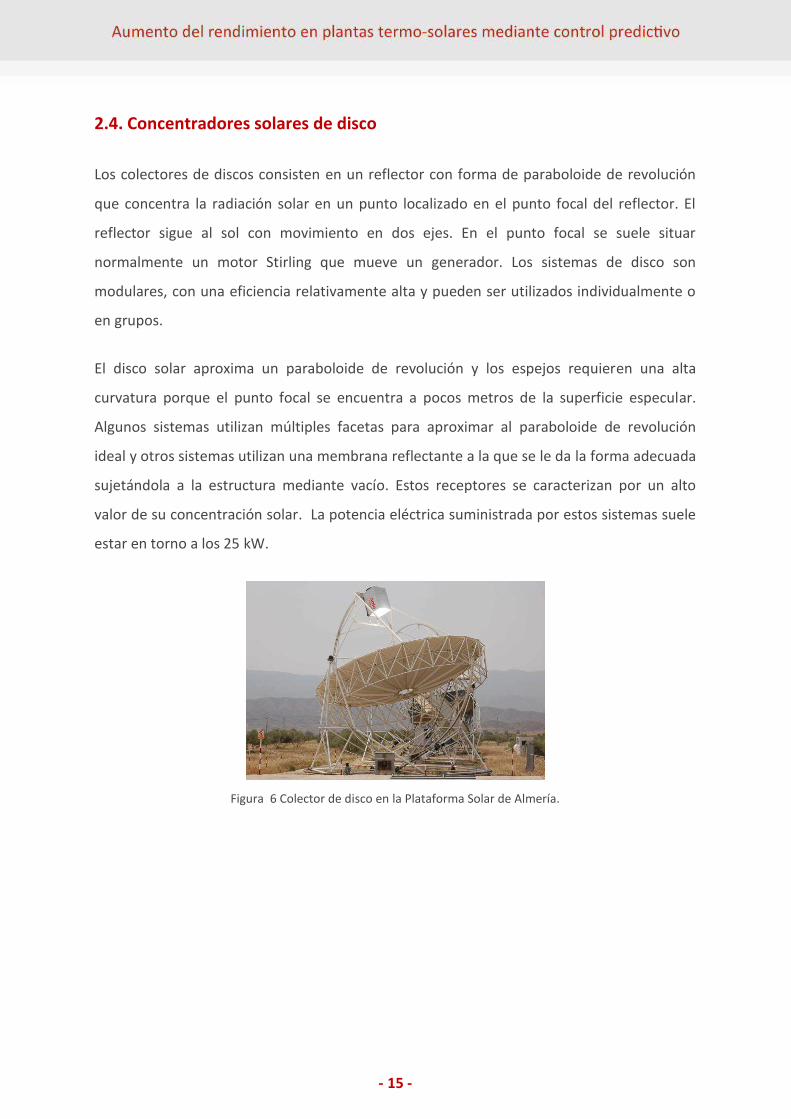
Los colectores de discos consisten en un reflector con forma de paraboloide de revolución
que concentra la radiación solar en un punto localizado en el punto focal del reflector. El
reflector sigue al sol con movimiento en dos ejes. En el punto focal se suele situar
normalmente un motor Stirling que mueve un generador. Los sistemas de disco son
modulares, con una eficiencia relativamente alta y pueden ser utilizados individualmente o
en grupos.
El disco solar aproxima un paraboloide de revolución y los espejos requieren una alta
curvatura porque el punto focal se encuentra a pocos metros de la superficie especular.
Algunos sistemas utilizan múltiples facetas para aproximar al paraboloide de revolución
ideal y otros sistemas utilizan una membrana reflectante a la que se le da la forma adecuada
sujetándola a la estructura mediante vacío. Estos receptores se caracterizan por un alto
valor de su concentración solar. La potencia eléctrica suministrada por estos sistemas suele
estar en torno a los 25 kW.
Figura 6 Colector de disco en la Plataforma Solar de Almería.

- 16 -
3. Control de sistemas de energía termo-solar
En el control de sistemas de energía termo-solar se pueden distinguir cuatro niveles: a) el
control de los colectores, b) la estimación y predicción de la radiación solar, c) el control del
sistema de conversión de energía y d) el control global.
3.1. Control del campo de colectores
El control del sistema de colectores consiste en controlar el movimiento de cada uno de los
sistemas de colectores de radiación de forma que se recolecta el máximo de radiación solar
en cada instante. En el caso de los sistemas de disco, con dos grados de libertad, la misión
del controlador es mantener el eje de revolución del paraboloide alineado con el vector
solar en cada momento. En el caso de los colectores cilindro parabólicos, con un solo grado
de libertad, el controlador debe mantener la normal del receptor formando el ángulo más
pequeño posible con el vector solar. El vector solar, que depende de la localización
geográfica del colector y de la hora del día. La posición de cada colector se determina por
cálculos trigonométricos. En algunos casos se utiliza un mecanismo de ajuste fino que mide
la posición relativa entre el colector y el vector solar.
En el caso de las centrales de torre o los colectores Fresnel lineales, los espejos se mueven
de forma que la radiación solar se refleja en el receptor central o en un tubo receptor
respectivamente. La normal de los espejos debe estar en la bisectriz del ángulo formado por
el vector solar y la línea que une el centro del heliostato con el receptor central.
En la literatura se pueden encontrar algoritmos para calcular el vector solar con pocos
requisitos computacionales (Blanco et al. [2001], Chen et al. [2006], Grena [2008]). Estos
- 17 -
algoritmos funcionan bien por periodos limitados de tiempo. Existen algoritmos de más
precisión válidos por los próximos 4000 años.
Para controlar bien al sistema es muy conveniente conocer bien el valor de la radiación solar
y tener una predicción de la misma en la ventana de tiempo apropiada para el control. Por
lo que se requiere instrumentación adecuada para medir la radiación solar directa
(pirheliómetros) y algoritmos de predicción de la radiación solar.
3.2. Control del sistema de generación
El control de la variables del sistema de conversión depende mucho del tipo de sistema. En
el caso de los fotovoltaicos, esta parte consiste en el control de la tensión e intensidad
producidas por las células solares de forma que operen en el punto de máxima eficiencia y el
control de los convertidores DC/AC necesarios para llevar la energía eléctrica a la red.
En el caso de las centrales termo-solares, la energía solar calienta un fluido que se utiliza
para producir vapor que se turbina para producir electricidad. Las variables a controlar en
este nivel son las temperaturas y caudales del fluido colector de calor. La diferencia
fundamental de este tipo de plantas con las plantas de energías no renovables es que la
fuente primaria de energía no es manipulable. En las centrales de combustibles fósiles,
cuando se necesita más potencia, se aumenta la inyección de combustible y se obtiene
mayor potencia en la salida. En las centrales solares no se puede aumentar la cantidad de
radiación solar que estamos recibiendo. El objetivo de control es obtener en cada instante
el máximo de energía disponible. Es decir, manipular el resto de las variables de forma que
se obtenga el máximo de energía solar en cada instante.
El fluido de intercambio de calor se utiliza para generar vapor y desde este punto, los
controladores no difieren significativamente de las estructuras de control de otras plantas
térmicas.

- 18 -
El sistema de control superior controla a cada uno de los subsistemas, decide la cantidad de
energía a producir, la cantidad de energía que se almacena y la cantidad de energía que se
turbina y convierte en energía eléctrica. En este nivel se suelen determinar los puntos de
funcionamiento óptimos para cada uno de los subsistemas. Como la radiación solar varía a
lo largo del día, las plantas solares permanecen poco tiempo en un punto de equilibrio y la
determinación de los puntos óptimos de funcionamiento debe ser hecha de forma dinámica.
Es más, los puntos óptimos de funcionamiento en cada instante no solo dependen de las
condiciones del entorno y del estado de la planta en cada instante, sino que depende
además de cómo van a evolucionar las variables en los instantes siguientes. La evolución de
las variables de entorno y del estado de la planta en los instantes siguientes se determina
utilizando algoritmos predictores y estructuras de control predictivas.
La energía solar es intermitente y no siempre está disponible cuando se la necesita. Las
plantas termo-solares permiten la utilización de sistemas de almacenamiento energético en
forma de calor, lo que facilita la integración de las plantas termo-solares en las redes de
energía. La liberalización del mercado de la energía y la aparición de propuestas de
mecanismos de fijación de precios y la utilización de estos para controlar las redes eléctricas
son parte fundamental del concepto de “smart grids”. Los dispositivos de almacenamiento
permitirían a las centrales termo-solares operar mas fácilmente en ese mercado cambiante
de precios cambiantes. La operación en estos mercados requiere la aplicación de técnicas de
predicción y control predictivo.
Los primeros controladores avanzados para sistemas termo-solares aparecieron al final de la
década de los 80 (Camacho el al, [1988], (Camacho el al, [1992]) que desarrollaron, además
de un modelo de simulación para los campos de colectores cilindro parabólicos, una serie de
esquemas de control adaptativo que estuvieron funcionando en el controlador del campo
ACUREX de la Plataforma Solar de Almería.
Las variables principales a controlar para este tipo de sistemas son los caudales y
temperaturas del fluido de transferencia de calor además de las temperaturas, caudales y
presión en el circuito de generación de vapor. El control del generador y la turbinas difiere
poco del utilizado en otras plantas térmicas con combustible fósiles. En la mayoría de los
- 19 -
casos el fluido utilizado para transferencia de calor es aceite. El aceite limita la temperatura
máxima de operación ya que a partir de determinada temperatura el líquido refrigerante
puede descomponerse o emitir volátiles inflamables que pueden representar problemas de
seguridad. La temperatura de máximas de operación depende del aceite utilizado pero
puede ser en torno a los 400ºC que es una temperatura relativamente baja para generar
vapor. Para aumentar el rendimiento de la instalación las plantas deben operar cercanas a
ese punto de operación.
La energía solar es intermitente y no siempre está disponible cuando se necesita y donde se
necesita. Debido a esto, la integración de la energía solar en las redes eléctricas representa
un desafío técnico importante.
El almacenamiento de energía es una solución potencial a ese problema ya que una
operación eficiente de la energía solar con un sistema de almacenamiento de energía
permite una mejor aproximación de la oferta de energía a la demanda.
En las plantas térmicas la energía solar se almacena usualmente en forma de vapor o calor
en depósitos de sales fundidas. De esta forma se puede generar electricidad en periodos
donde no llega suficiente radiación solar. También los equipos de generación de vapor,
turbina y generador eléctrico no tienen que estar diseñados para la potencia solar máxima
sino para una potencia media, con lo que los costos de instalación disminuyen y los equipos
se usan con una mayor tasa de utilización. De esta forma, cuando la energía solar disponible
es mayor de la que se puede convertir a energía eléctrica o mayor de la que se puede verter
a la red, la energía sobrante se almacena para ser utilizada posteriormente para
suplementar o sustituir a la energía solar en periodos de baja radiación solar. Los tanques de
almacenamiento suelen estar bien aislados y permiten almacenar la energía por días
permitiendo la operación de la planta por periodos de horas. Una de las últimas centrales de
torre instalada, Gema Solar, puede operar durante 24 horas de forma continua gracias al
sistema de almacenamiento.

- 20 -
3.3. El control de la producción
El precio de la energía eléctrica se determina por una variedad de métodos que dependen
no solamente del país sino de la fecha en que la planta fue puesta en servicio. Con la
liberalización del mercado eléctrico y la utilización de equipos electrónicos y de control de
forma masiva, están apareciendo nuevos mecanismos de fijación de precios. Los precios
cambiantes se consideran uno de los mecanismos de control fundamental para las redes
eléctricas modernas y es un concepto que está íntimamente ligado al concepto de “smart
grids”. Los precios de la energía suelen correlacionar bastante bien con la demanda, ya que
los precios tienden a cubrir los costes marginales de generación que crecen normalmente
con la demanda. Para fijar los precios se utilizan también factores de riesgo, por ejemplo, la
generación en reserva disponible para hacer frente a los picos de demanda no programados
afectan al precio de la energía eléctrica. El precio de una buena parte de la energía eléctrica
producida en España se fija para cada hora del día en el mercado diario por un mecanismo
de oferta y demanda.
El uso de las energías renovables se incentiva en un buen número de países por diferentes
mecanismos entre los que se encuentran el “Feed in Tariff” (FiT) que no solamente consiste
en una prima por la energía solar producida sino también contratos a largo plazo que
garantizan la venta de la energía solar producida. Las compañías eléctricas y/o las
autoridades regionales o nacionales están obligadas a comprar las energías renovables.
Los operadores de plantas de energía renovable se pueden beneficiar de los sistemas de
almacenamiento desplazando la generación de energía de periodos valles de bajo costo a
periodos picos donde la energía eléctrica es más cara. En este trabajo se analizan dos
posibles escenarios, uno donde la producción no está comprometida y otro escenario donde
la producción eléctrica está comprometida y las desviaciones entre energía comprometida y
producida está sometida a penalizaciones. Si los precios son constantes a lo largo del día la
política óptima es producir toda la energía eléctrica posible. El almacenamiento solo
se utiliza en aquellos casos en que haya mas energía solar que la que se puede convertir
a energía eléctrica. Esta situación se puede producir bien porque el sistema de conversión

- 21 -
haya sido diseñado para una potencia media y no para la potencia solar pico o porque haya
equipos parados por averías o mantenimiento.
Si los precios de la energía eléctrica varían lo largo del día, el almacenamiento puede ser
utilizado para desplazar la producción eléctrica de periodos valles a periodos picos. La
política óptima es generar de tal forma que se maximicen los beneficios. La energía
producida depende básicamente de la radiación solar y de las condiciones de operación de
la planta. Por ejemplo, cuando la planta está arrancando al comienzo del día se necesita
cierta energía para calentar la planta y llevar a todos los sistemas a una temperatura de
operación. Si la planta estuviera operando en el periodo anterior, no se requiere esa
energía, más aún, el proceso de arranque de la planta requiere cierto tiempo. Es decir, que
aun utilizando modelos simples es necesario tener en cuenta la dinámica de la planta para
tomar decisiones apropiadas.
El mercado de electricidad ha sufrido grandes cambios con la liberalización del sector. En la
actualidad, el mercado en España se regula por la Resolución de (1 de junio de 2010, de la
Secretaría de Estado de Energía, por la que se aprueba el cambio de unidad de contratación
en las Reglas de funcionamiento del mercado diario e intradiario de producción de energía
eléctrica y en el procedimiento de operación (B.O.E. 8 de junio del 2010) y las páginas de
Omel (Omel [2010]), que se resume a continuación.
El mercado de electricidad es el conjunto de transacciones derivadas de la participación de
los agentes del mercado en las sesiones de los mercados diario e intradiario, mercado a
plazos, y de la aplicación de los Procedimientos de Operación Técnica del Sistema. Los
contratos bilaterales físicos realizados por vendedores y compradores se integran en el
mercado de producción una vez finalizado el mercado diario. Los agentes del mercado son
las empresas habilitadas para actuar en el mercado de producción como vendedores y
compradores de electricidad. Los productores y los consumidores directos pueden acudir al
mercado como agentes del mercado o celebrar contratos bilaterales físicos.
La gestión económica del mercado de electricidad está encomendada al operador del
mercado ibérico de energía - polo español, S.A.
- 22 -
El mercado diario tiene por objeto llevar a cabo las transacciones de energía eléctrica para el
día siguiente mediante la presentación de ofertas de venta y adquisición de energía eléctrica
por parte de los agentes del mercado. Las ofertas de ventas se presentan al operador del
mercado, y son incluidas en un procedimiento de casación teniendo efectos para el
horizonte diario de programación, correspondiente al día siguiente del día de cierre de la
recepción de ofertas para la sesión, y comprende veinticuatro periodos horarios de
programación consecutivos.
Las ofertas de venta y compra podrán realizarse considerando de 1 a 25 tramos en cada
hora, en cada uno de los cuales se oferta energía y precio de la misma, siendo creciente el
precio en cada tramo en el caso de las ventas, y decreciente en el caso de las compras.
El operador del mercado realizará la casación de las ofertas económicas de compra y venta
de energía eléctrica, por medio del método de casación. El método de casación simple es
aquél que obtiene de manera independiente el precio marginal, así como el volumen de
energía eléctrica que se acepta para cada unidad de producción y adquisición para cada
periodo horario de programación. El precio en cada periodo horario será igual al precio del
último tramo de la oferta de venta de la última unidad de producción cuya aceptación haya
sido necesaria para atender la demanda que haya resultado casada.
El mercado intradiario tiene por objeto atender, mediante la presentación de ofertas de
venta y adquisición de energía eléctrica por parte de los agentes del mercado, los ajustes
sobre el Programa Diario Viable Definitivo. El mercado intradiario se estructura actualmente
en seis sesiones a lo largo del día. El proceso de presentación de ofertas y el proceso de
casación son análogos al seguido para el mercado diario.
Para un productor de electricidad que acuda al mercado diario o intradiario hay dos tipos de
decisiones. Por una parte determinar la oferta y por otra parte, una vez que las casaciones
se hayan producido, la decisión es decidir qué energía se produce y se entrega a la red y qué
energía se almacena para cubrir en la mejor forma posible el programa contratado. Como
la energía solar no puede predecirse exactamente, las decisiones se tienen que formular en
un contexto lleno de incertidumbre.

- 23 -
El rendimiento de una planta solar depende de las condiciones ambientales y de las
condiciones de operación. El punto óptimo de operación en cada instante depende de las
condiciones ambientales, fundamentalmente radiación solar y temperatura ambiente y del
estado de la planta que en el caso de una planta solar cambian a lo largo del día.
3.4. El control en las centrales de torres
Una central de torre se compone de campo de heliostatos, de la unidad receptora, el
intercambiador de calor, unidad de almacenamiento térmico, la unidad de generación de
vapor y la turbina. Normalmente cada uno de estos equipos lleva su propia unidad de
control. El sistema de control integrado se comunica con las distintas unidades para
coordinarlas de forma que la planta funcione de manera eficiente y segura.
El sistema de control maestro de una planta solar de torre opera en distintos niveles. El
primer nivel se ocupa de controlar la posición de los heliostatos de forma que sigan al sol
apuntando continuamente al receptor y suministrando información al nivel superior sobre el
estado de los heliostatos. El segundo nivel es el sistema de control distribuido que envía
información al campo de heliostatos.
El vector solar necesita ser calculado para cada heliostato que se apunta en la dirección de la
bisectriz del ángulo formado por el vector solar y el vector que une el centro del heliostato
con el receptor. Los sistemas actuales utilizan un esquema de control en bucle abierto que
calculan la dirección del vector solar (Blanco et al. [2001]). El cálculo del flujo que llega al
receptor se hace en bucle abierto sin tener en cuenta los errores debidos a la estimación de
la posición de los heliostatos y de la torre, el propio modelo solar, latitud y longitud, el
astigmatismo que depende del tiempo, la refracción atmosférica, la precisión de los
posicionadores y las tolerancias mecánicas y de montaje (Blanco et al. [2001]).
La solución propuesta (Berenguel et al. , [2004]) para hacer frente a alguno de estos errores
está basada en el uso de una cámara CCD que captura la imagen del sol reflejado por cada
uno de los heliostatos en un blanco utilizado para la corrección de estos errores y la
calibración automática de los heliostatos. Las imágenes obtenidas permiten calcular la
- 24 -
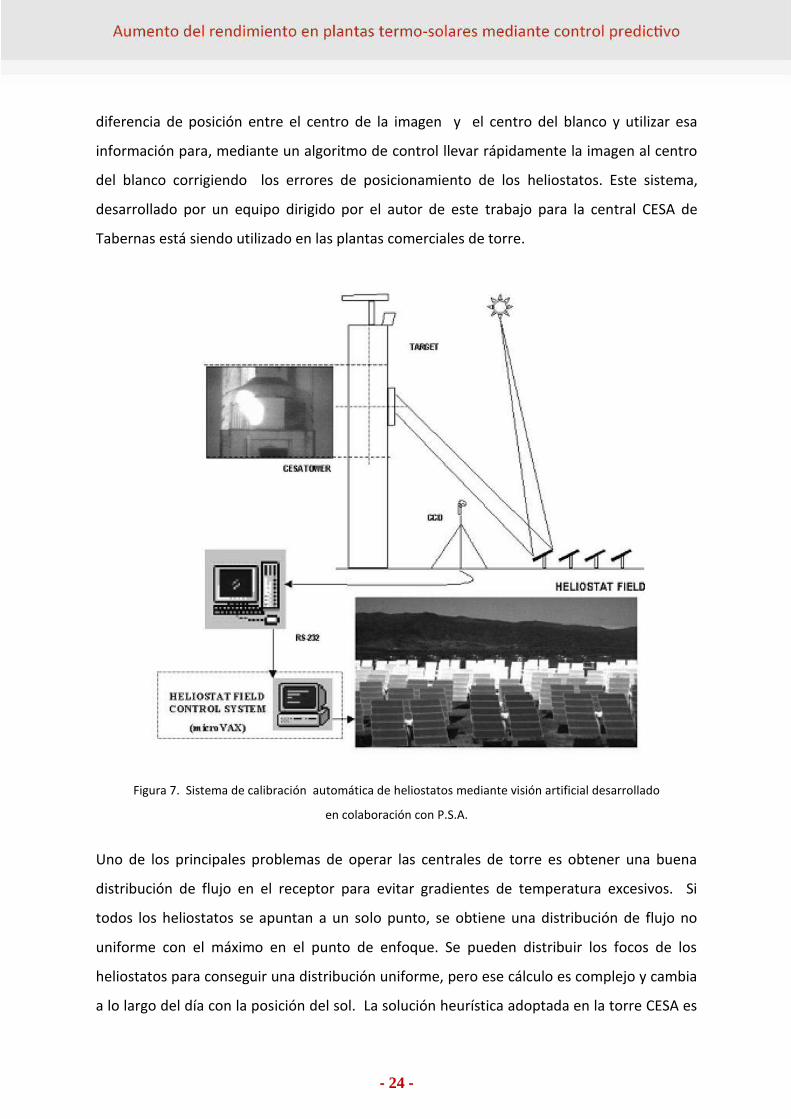
diferencia de posición entre el centro de la imagen y el centro del blanco y utilizar esa
información para, mediante un algoritmo de control llevar rápidamente la imagen al centro
del blanco corrigiendo los errores de posicionamiento de los heliostatos. Este sistema,
desarrollado por un equipo dirigido por el autor de este trabajo para la central CESA de
Tabernas está siendo utilizado en las plantas comerciales de torre.
Figura 7. Sistema de calibración automática de heliostatos mediante visión artificial desarrollado
en colaboración con P.S.A.
Uno de los principales problemas de operar las centrales de torre es obtener una buena
distribución de flujo en el receptor para evitar gradientes de temperatura excesivos. Si
todos los heliostatos se apuntan a un solo punto, se obtiene una distribución de flujo no
uniforme con el máximo en el punto de enfoque. Se pueden distribuir los focos de los
heliostatos para conseguir una distribución uniforme, pero ese cálculo es complejo y cambia
a lo largo del día con la posición del sol. La solución heurística adoptada en la torre CESA es

- 25 -
asociar los heliostatos a un grupo con un punto de enfoque común. En la torre CESA, y para
el receptor volumétrico se utilizaron 5 focos, uno de los cuales se apunta al centro y lo
demás a la periferia. Analizando la respuesta de las medidas de termopares dispuesto a lo
largo de la superficie del receptor, el operador movía los focos y reasignaba los heliostatos a
grupos diferentes. En (García-Martín et al. , [1999]).
Se describe un sistema desarrollado para obtener una distribución uniforme que funcionó
con notable éxito en la P.S.A.
Figura 8 Figura 7 Sistema de distribución uniforme de flujo en receptores volumétricos
de torre desarrollado en colaboración con P.S.A.

- 26 -
3.5. Control del campo de colectores cilindro parabólicos
El campo de colectores solares cilindro-parabólicos ACUREX es una de las instalaciones de la
Plataforma Solar de Almería (P.S.A.) situada en el desierto de Tabernas (Almería, sudeste de
España). Dicho campo consta de 480 módulos de colectores. Cada colector está constituido
por una superficie parabólica que concentra la radiación solar directa en un tubo situado en
la línea focal de la parábola (Duffie and Beckam [1991]). La concentración de rayos solares
en el tubo permite calentar el fluido que circula por su interior. La orientación de los
colectores en el campo solar es este-oeste. Los colectores tienen un sistema de seguimiento
solar de un solo eje (elevación) para garantizar la concentración de la radiación solar en los
tubos absolvedores. El fluido caloportador empleado es aceite tipo Santhoterm 55, cuyo
límite de temperatura sin degradarse está en 300ºC. El aceite se encuentra en un tanque de
almacenamiento térmico de donde se extrae de la parte baja para ser calentado. Por medio
de una bomba de impulsión se envía al campo y el retorno del aceite caliente puede hacerse
a la parte alta del tanque (aceite de proceso) o a la parte baja (recirculación hasta alcanzar
una temperatura de trabajo) por medio de una válvula de tres vías que se encuentra a la
salida del campo solar. El tanque tiene una capacidad efectiva de 115 m3. Las propiedades
del aceite permiten que el tanque se convierta en un almacén de energía estratificado en
función de la densidad del mismo. El aceite más frío se encuentra en la parte baja del tanque
y el aceite caliente en la parte superior. El aceite caliente se utiliza en procesos de
generación de electricidad o en desalación solar, como se comenta en más detalle en la
sección 2. En ambos casos el aceite se extrae de la parte alta del tanque, siendo por tanto
conveniente evitar fluctuaciones en la temperatura de salida del campo.
El objetivo de control de un campo de colectores solares es mantener la temperatura de
salida del campo a un valor preestablecido que es determinado de forma manual durante la
operación en planta. Dicho valor preestablecido se denomina consigna o temperatura de
referencia (Tref). Esta consigna debe ser lo más alta posible para tener el aceite del tanque a
una temperatura suficiente para alimentar el generador de vapor de una planta
desalinizadora o producir energía eléctrica (logrando además una solución de compromiso
en la optimización de la eficiencia del campo solar frente a las pérdidas térmicas). Para

- 27 -
producir energía eléctrica se necesita calentar el aceite a una temperatura en torno a 285ºC.
Además, para evitar stress del material de los tubos absolvedores del campo solar se
recomienda establecer una consigna tal que la diferencia entre la temperatura del aceite a la
salida y la temperatura de entrada al campo no sea mayor de 80 ºC. Esto añade más
complejidad a la operación de la planta ya que es necesario cambiar la consigna
dependiendo del punto de operación de la planta (determinado fundamentalmente por el
nivel de radiación solar, temperatura de entrada del aceite, caudal de aceite, temperatura
ambiente y reflectividad de los espejos, que puede también variar por deposición de polvo)
y de las restricciones impuestas por seguridad. Por ejemplo, la aparición esporádica de
nubes dificulta mucho el control en ese sentido, ya que las variaciones en el nivel de
radiación solar afectan rápidamente a la temperatura de salida del campo. El problema del
establecimiento de consignas de temperatura adecuadas a las condiciones de la planta
mencionadas en los párrafos previos se ha resuelto en (Cirre et al. [2003]) donde diseñamos
un generador automático de consignas que tiene en cuenta las restricciones por seguridad
de la planta y su estado de funcionamiento. La temperatura de salida se controla variando el
caudal de aceite enviado por la bomba de circulación. La bomba está diseñada para
proporcionar un caudal volumétrico de aceite entre 2 y 12 l/seg., determinando así el rango
de operación de la planta. Las no linealidades que caracterizan a la planta aumentan la
complejidad del sistema. Dependiendo del rango de operación y de las perturbaciones de la
planta - irradiancia (Irr), temperatura de entrada (Tin), temperatura ambiente (Tamb) y
- la ganancia, constantes de tiempo y retardo del sistema
varían.
La estructura de control que diseñamos en (Cirre et al. [2003]) es el germen del trabajo que
presentamos aquí. Los bloques de control diseñados son un generador de consignas, un
controlador por adelanto y un I-PD en paralelo al control por adelanto. El generador de
consigna proporciona la consigna de temperatura de salida, Tref, adecuada teniendo en
cuenta el estado actual de la planta (Irr, Tin, Tamb, reflectividad de los espejo y máximo
salto térmico permitido al controlador por adelanto y a la estructura I-PD, cuyas salidas se
combinan dando un caudal adecuado para obtener a la salida de los lazos una temperatura
Tout igual a la Tref .

- 28 -
El control por adelanto establece un caudal nominal calculado a partir del modelo de
parámetros concentrados del campo (Camacho et al. [1992]) que debería ser suficiente para
obtener la temperatura deseada. Debido a la inexactitud del modelo utilizado y
perturbaciones no medibles es necesario corregir mediante un control por realimentación.
El objetivo de introducir un generador automático de consignas en el lazo de control es
facilitar a la estructura de control la regulación introduciendo una Tref adecuada para las
condiciones en las que se encuentra la planta que además asegure la mayor cantidad de
energía posible dentro de los límites de seguridad de la planta. Con esto se consigue
además, mantener que el caudal no sea inferior a 3 l/seg, ya que la dinámica de la planta es
más compleja cuando se trabaja a muy bajo caudal debido a que el tiempo de residencia del
fluido en el campo solar es mayor, la constante de tiempo del sistema aumenta y es posible
excitar los modos anti resonantes que se han demostrado pueden aparecer en este sistema
(Meaburn and Hughes, [1994]; Berenguel and Camacho, [1996]). Este elemento proporciona
robustez en el lazo de control ante perturbaciones de radiación y temperatura de entrada,
suministrando como entrada al controlador una temperatura de referencia óptima y segura
para la operación. Debido a los cambios bruscos en las perturbaciones es necsario procesar
la consigna con un filtro paso bajo. Otro beneficio del uso de un generador automático de
consignas es la ayuda que proporciona al controlador ya que al utilizar el valor de la
temperatura de entrada del aceite, las perturbaciones debidas a variaciones en esta
temperatura son tenidas en cuenta. Estas perturbaciones son significativas en la fase de
arranque debido a la existencia de aceite frío en las tuberías. Tomando como base una
ecuación de balance de energía en los estudios realizados por Camacho et al. [1997] y
Carmona [1985] se ha obtenido una función que calcula una temperatura de referencia
adecuada a las condiciones actuales de la planta y que tiene en cuenta el salto térmico en el
campo.
La energía que entra en el sistema depende de la eficiencia óptica de los colectores ACUREX,
de la reflectividad de los espejos, de la superficie efectiva reflectante y de la irradiancia
efectiva en la superficie del colector (Ajona, [1998]). Los valores de la superficie e irradiancia
efectiva se obtienen en función del ángulo de incidencia entre los rayos solares y la normal
- 29 -
del colector. Dicho ángulo depende de la hora solar y de la fecha. El ángulo de incidencia se
actualiza frecuentemente durante la operación de la planta para establecer la superficie e
irradiación efectivas a partir de la radiación directa y de la superficie total reflectante. La
energía perdida por el sistema se calcula a partir de una función global de pérdidas que ha
sido estimada a partir de datos experimentales (Carmona, [1985])
Con estos valores se calcula la temperatura de referencia que se hace pasar por un filtro
paso bajo para evitar los cambios bruscos en la consigna debidos a cambios de irradiancia
por el paso de nubes.
Con el objetivo de cancelar las perturbaciones que afectan a la planta durante la operación
se ha diseñado una estructura de control por adelanto como el descrito en (Camacho et al.
[1997]).
Como ya se indicó previamente, debido a las incertidumbres y a las simplificaciones hechas
en el cálculo del controlador por adelanto, el modelo del sistema no es exacto, y el control
por adelanto no es capaz de corregir el error. Para eliminar ese error en nuestra propuesta
(Cirre at al. [2003]) se añadió una estructura básica I-PD en paralelo con controlador por
adelanto. En la figura 9 y 10 se ven los resultados del trabajo realizado (Cirre et al. [2003])
donde se aprecia cómo la temperatura de salida sigue a la temperatura de referencia en el
caso de un día claro (figura 9) o en el caso de una fuerte perturbación provocada por el paso
de nubes (figura 10).

- 30 -
Figura 9. Evolución de la temperatura de salida en el campo ACUREX en un dia claro con algoritmo se
generación automática de consigna propuesto.
Figura 10. Evolución de la temperatura de salida en el campo ACUREX en un día con perturbaciones causadas
por el paso de nubes con algoritmo de generación automática de consigna propuesto.
El arranque es la fase más complicada desde un punto de vista de control, hasta tal punto
que se suele hacer de forma manual donde el operador lleva la planta a condiciones seguras
para ser operada de forma automática por el algoritmo de control.
11.0 11.5 12.0 12.5 13.0 13.5 14.0 14.5 15.00
50
100
150
200
250
Temperatura de entrada Temperatura de salida Temperatura de referencia
Tem
pera
tura
(o C
)
Hora Local (horas)
11.0 11.5 12.0 12.5 13.0 13.5 14.0 14.5 15.00
200
400
600
800
1000
Irra
dian
cia(
W/m
2 ), c
auda
l (l/s
)
Hora Local (horas)
Caudal*100 Irradiancia directa
12.8 13.0 13.2 13.4 13.6 13.8 14.0 14.2 14.4 14.6 14.8 15.00
50
100
150
200
250
Temperatura de entrada Temperatura de salida Temperatura de referencia
Tem
pera
tura
(o C
)
Hora local (horas)
12.8 13.0 13.2 13.4 13.6 13.8 14.0 14.2 14.4 14.6 14.8 15.00
200
400
600
800
1000Ir
radi
anci
a(W
/m2 ),
cau
dal (
l/s)
Hora local (horas)
Caudal*100 Irradiancia directa

- 31 -
4. Control predictivo basado en modelo
En este apartado presentamos una estructura de control a varios niveles para la operación
óptima de centrales termo-solares. Este sistema permite obtener la máxima producción de
energía eléctrica en plantas termo-solares.
El concepto de optimización se usa de forma errónea en muchos contextos. Se habla de
optimizar un proceso cuando en realidad lo que se está haciendo es medir o monitorizar.
Hay que hacer una distinción muy clara: monitorizar es recoger información de lo que está
ocurriendo en el proceso, es decir, observar la evolución de determinadas variables
involucradas que proporcionan información sobre el estado actual del proceso.
Por otro lado, la optimización implica la adopción de la mejor acción (es decir, la óptima) en
cada instante de tiempo para conseguir un determinado fin, que en el caso que nos ocupa es
operar el proceso obteniendo la mayor cantidad de energía eléctrica posible al menor coste.
Resulta por tanto evidente que, aunque la monitorización proporciona información que
puede ser muy valiosa para tomar acciones correctoras a posteriori, según se dijo en la
introducción, por el mero hecho de observar no se está actuando sobre el proceso y por
tanto no se está tomando ninguna acción sobre él. Es decir, la monitorización no implica por
sí misma una optimización, aunque sí es un paso necesario. En cualquier caso las medidas
que se utilicen deben de tener unas cualidades adecuadas, de lo contrario nos podemos
encontrar con la imposibilidad de facto de realizar con éxito la optimización.
La Optimización o Control Óptimo se puede considerar que comenzó en los años 50 del siglo
XX. Sus primeras aplicaciones fueron en la incipiente carrera espacial, donde hubo que
resolver problemas como hacer evolucionar una nave optimizando el consumo de
- 32 -
combustible o minimizando el tiempo de funcionamiento. Rápidamente estas ideas
empezaron a extenderse a la mayoría de los procesos industriales, donde se buscaba una
operación óptima del proceso, es decir, un incremento en la producción minimizando el
gasto requerido (principalmente energético y de materias primas).
Con la evolución de los computadores tanto en potencia y precio como en fiabilidad, la
aplicación de los métodos de optimización a procesos en la industria química y alimentaria
se fue extendiendo con gran rapidez, dando lugar al desarrollo de diversos métodos para
realizar una optimización del proceso en línea. Entre estos métodos cabe destacar el
Control Predictivo Basado en Modelo, con productos comerciales como DMC o MAC. Hoy
día, el Control Predictivo es sin duda la estrategia de optimización más empleada en los
procesos industriales, sobre todo en la industria química y petroquímica, donde la aplicación
de estas ideas conlleva un considerable ahorro a las empresas que la llevan a cabo.
Aunque en la actualidad la mayoría de las aplicaciones de Control Predictivo se llevan a cabo
en grandes plantas con sofisticados sistemas de control distribuido, la tecnología ya está
preparada para su extensión a las pequeñas y medianas empresas. La idea sobre la que se
apoya el Control Predictivo es muy sencilla: si se dispone de un modelo matemático del
proceso, entonces mediante una serie de manipulaciones de cálculo, es posible decidir en
cada instante qué es lo que hay que hacer para cumplir los objetivos en el futuro. Estos
cálculos los debe llevar a cabo un computador adecuado que debe conocer el estado del
proceso en todo momento mediante una serie de medidas representativas del mismo y ser
capaz de actuar sobre él (a través de los parámetros y elementos de manipulación
disponibles).
El objetivo mas normal es maximizar la producción de electricidad respetando las
restricciones de operación de las plantas. Ello implica:
Medir correctamente las variables necesarias (caudales, temperaturas, etc.).
Poder mantener las variables cruciales en el punto de operación deseado.
Aplicar la estrategia de optimización, indicando a cada regulador dónde debe mantener
el punto de operación (consigna).

- 33 -
El Control Predictivo (Model Predictive Control, MPC) se desarrolló al finales de los setenta y
ha tenido un desarrollo considerable desde entonces. El término Control Predictivo no
designa a una estrategia de control particular sino a un conjunto de métodos de control que
hacen uso explícito de un modelo del proceso para obtener la señal de control minimizando
una función objetivo. Estos métodos de control llevan a controladores que tienes
básicamente la misma estructura y los mismos elementos:
Uso explícito de un modelo para predecir la evolución del proceso en los instantes
futuros.
Minimización de una función objetivo.
Utilización de un horizonte de control finito y deslizante que implica el cálculo de la
secuencia de control para todo el horizonte pero la aplicación de la primera señal}al
de la secuencia y repetición de todo el proceso en el próximo instante de muestreo.
Los distintos algoritmos de control predictivo difieren en el tipo de modelo utilizado para
representar al proceso y a las perturbaciones y la función objetivo considerada. Existen
aplicaciones de control predictivo a diversos procesos que van desde procesos tan
diversos como robots a la anestesia clínica. El control predictivo presenta una serie de
ventajas sobre otros métodos, entre las que se pueden citar las siguientes (Camacho y
Bordons, [2012]), :
Es una técnica particularmente atractiva para los operadores que requiere pocos
conocimientos de control porque los conceptos son muy intuitivos y la sintonización
relativamente simple,
Se puede utilizar para controlar una gran variedad de procesos, desde procesos muy
simples hasta procesos con dinámicas complejas como procesos con grandes
tiempos muertos, procesos de fase no mínima, procesos inestables o procesos
multivariables,
Su carácter predictivo lo hace compensar intrínsecamente los tiempos muertos,
\item introduce un control anticipativo (feed forward) y de forma natural se
compensan las perturbaciones medibles,

- 34 -
La ley de control resultante es fácilmente implementable,
Es muy útil cuando se conocen las referencias futuras, como ocurre en el caso de
robótica o procesos por lotes y
Permite tratar las restricciones de una forma sistemática y conceptualmente muy
simple durante la fase de diseño.
Si la dinámica del proceso no cambia y no existen restricciones, la mayor parte de los
cálculos se puede realizar fuera de línes y el controlador resultante es simple,
pudiéndose aplicar a procesos de dinámicas rápidas; en caso contrario, los requisites de
cálculo son mucho mayores. Aunque hay que decir que debido a la potencia de los
computadores actuales esto no es realmente una dificultad insalvable. La mayor
dificultad que presenta para su aplicación es la necesidad de un modelo apropiado del
proceso cuya obtención requiere unos conocimientos mínimos de control. El control
predictivo ha demostrado ser en la práctica una estrategia razonable de control y ha sido
aplicado con éxito a numerosos procesos industriales.
4.1. Estrategia del Control Predictivo
La metodología de que todos los controladores pertenecientes a la familia de de
controladores MPC se caracteriza por la siguiente estrategia:
1. Las salidas futuras para un horizonte determinado N, llamado horizonte de
predicción, se predicen cada instante t utilizando el modelo del proceso. Estas
predicciones de la salida y(t+k | t)1 para k=1 …N dependen de los valores conocidos
hasta el instante t (entradas y salidas conocidas ) y de las señales de control u(t+k |
t), para k=0 … N-1, que han de ser calculadas y enviadas al sistema.
2. La secuencia de señales de control futuras se calcula minimizando un criterio para
mantener al proceso lo más cerca posible de la trayectoria de referencia w(t+k). Este
1 La notación indica que nos referimos a la estimación de la variable en el instante t+k hecha a partir de la
información disponible en el instante t.
- 35 -
criterio toma normalmente la forma de una función cuadrática del error entre la
salida predicha y la trayectoria de referencias futuras. En la mayor parte de los casos
se incluye también el esfuerzo de control dentro de la función objetivo. La solución
explícita se puede obtener cuando el criterio es cuadrático y el modelo lineal; en
caso contrario se ha de utilizar un método numérico para buscar la solución.
3. La señal de control u(t| t) se envía al proceso mientras que el resto de las señales
calculadas no son consideradas, ya que en el instante siguiente de muestreo y(t+1)
es ya conocida y los pasos anteriores se repiten con este nuevo valor. Por lo que
u(t+1| t+1) se calcula con información diferente y en principio será también
diferente de u( t+1| t).
El modelo de proceso juega, en consecuencia, un papel decisivo en el controlador. El modelo
elegido debe ser capaz de capturar la dinámica del proceso para predecir de forma precisa la
evolución del sistema. Al mismo tiempo, debe ser suficientemente simple para inplementar
y entender. Las distintas metodologías del control predictivo difieren fundamentalmente en
el tipo de modelo utilizado.
El modelo matemático que describe el comportamiento dinámico del sistema puede
contener junto a las ecuaciones físicas del sistema las incertidumbres y perturbaciones que
afectan al mismo. El modelo dinámico puede ser lineal, no lineal, en tiempo continuo, en
tiempo discreto y puede estar expresado como función de transferencia, ecuaciones de
estado, o como modelos de respuesta impulsional o escalón.
El optimizador es otra parte fundamental de la estructura ya que permite obtener las
acciones de control a aplicar. Si la función de coste es cuadrática, el modelo lineal y no
existen restricciones, se puede obtener una solución explícita. Si éste no es el caso se ha de
acudir a un algoritmo numérico de optimización que requiere mayor capacidad de cálculo. El
tamaño del problema resultante depende del número de variables, del los horizontes de
control y predicción y del número de restricciones, aunque se puede decir que en general
problemas de optimización resultantes en este contexto son problemas más bien modestos.

- 36 -
Se puede apreciar que la estrategia de control predictivo es muy similar a la estrategia que
se utiliza cuando se conduce un automóvil. El conductor conoce la trayectoria de referencia
deseada para un horizonte de control finito. Tomando en consideración las características
del automóvil (modelo mental del automóvil) decide qué acción de control tomar
(acelerador, frenos, volante, marchas) para seguir la trayectoria deseada. Sólo la primera
acción de control de la secuencia calculada mentalmente es aplicada por el conductor en
cada instante y el procedimiento se repite en los sucesivos instantes utilizando el concepto
de horizonte deslizante. Se puede apreciar que cuando se utiliza un esquema de control
clásico como PID se utilizan sólo las señales pasadas. Esta forma de conducir el automóvil
sería como conducir utilizando el espejo. Esta analogía no es totalmente justa con los PIDs,
porque el control predictivo utiliza más información (trayectoria de referencia). Se puede
apreciar que si se le proporciona al controlador PID como referencia un punto en la
trayectoria futura la diferencia entre ambas estrategias de control no parecería tan abismal.
Desde el final de la década de los 70 aparecieron varios artículos mostrando un interés
incipiente en el control predictivo en la industria, principalmente en (Richalet at al. [1976])
(Richalet at al. [1978]) presentando el control predictive heurístico basado en modelo
("Model Predictive Heuristic Control ", y (Cutler et al. [1980]) sobre control con matriz
dinámica ( "Dynamic Matrix Control", DMC). Ambos algoritmos utilizan explícitamente un
modelo dinámico del proceso (la respuesta impulso en el primer caso y la respuesta escalón
en el segundo) para predecir el efecto de las futuraS señales de control en las variables a
controlar. Estas formulaciones eran heurísticas e hicieron uso del potencial cada vez mayor
de los computadores digitales en aquellos tiempos.
El control predictivo llegó a ser popular, y particularmente en la industria de procesos
químicos, debido a la simplicidad del algoritmo y a la utilización del modelo de respuesta
ante impulso que, aunque requiriendo muchos más parámetros que las formulaciones en el
espacio de estado o en el dominio de entrada y salida, resulta más intuitivo y requiere
mucha menos información a priori para la identificación.

- 37 -
La mayoría de estas aplicaciones se llevaron a cabo en sistemas multivariables que incluían
restricciones. A pesar de este éxito, estas formulaciones carecían de una teoría formal para
proveer resultados sobre la estabilidad y robustez.
De hecho, el caso de horizonte finito parecía demasiado difícil de analizar excepto en casos
muy específicos. Otra línea de trabajo se desarrolló independientemente en torno a las
ideas de control adaptativo, desarrollándose estrategias de control predictivo para sistemas
monovariables y formulada sobre modelos de entrada y salida. El controlador control
predictivo generalizado ("Generalized Predictive Control” (GPC)) desarrollado en (Clarke et
al. [1987]) pueden ser mencionado en este contexto. El GPC utiliza ideas de los
controladores de minima varianza generalizada (Generalized Minimum Variance) y es en la
actualidad uno de los métodos mas utilizados a nivel académico.
Aunque los primeros trabajos sobre GPC contienen algunos resultados de estabilidad para
el caso nominal, la falta de resultados generales sobre la estabilidad de los controladores de
horizontes finito y deslizante constituyó un inconveniente para su utilización al principio.
Para hacer frente a esto, apareció en los 90s una nueva línea de trabajo sobre controladores
predictivos con estabilidad garantizada .
Otra de la líneas de investigación abiertas en los últimos años es el control predictivo
robusto. La idea básica es tener en cuenta las incertidumbres sobre el proceso de una
manera explícita y diseñar el controlador predictivo para optimizar la función objetivo ante
la peor situación posible de las incertidumbres. Estos resultados prometedores permiten
pensar que el control predictivo experimentará una mayor diseminación tanto en el mundo
académico como en la comunidad industria. En este contexto uno de los mayores
fabricantes de sistema de control distribuido, Honeywell , incorpora control predictivo
robusto en uno de sus productos (Robust Multivariable Predictive Control RMPCtm) para el
TDC 3000.
El control predictivo se puede considerar una técnica madura para sistemas lineales y no
muy rápidos, como los encontrados normalmente en la industria de procesos. Sistemas más

- 38 -
complejos, tales como sistemas no lineales, híbridos, y o sistemas muy rápidos, eran
considerados como fuera del alcance de los controladores predictivos. Durante los últimos
años se han producido resultados espectaculares en estos campos. Se ha demostrado que
un controlador predictivo con restricciones lineales resulta ser un controlador afín a trozos
que puede ser inplementado con poca carga de computación aunque la técnica solo puede
aplicarse a sistemas de dimensiones dinámicas reducidas. Recientemente han aparecido en
la literature aplicaciones del los controladores predictivos a sistemas no lineales o híbridos.
- 39 -
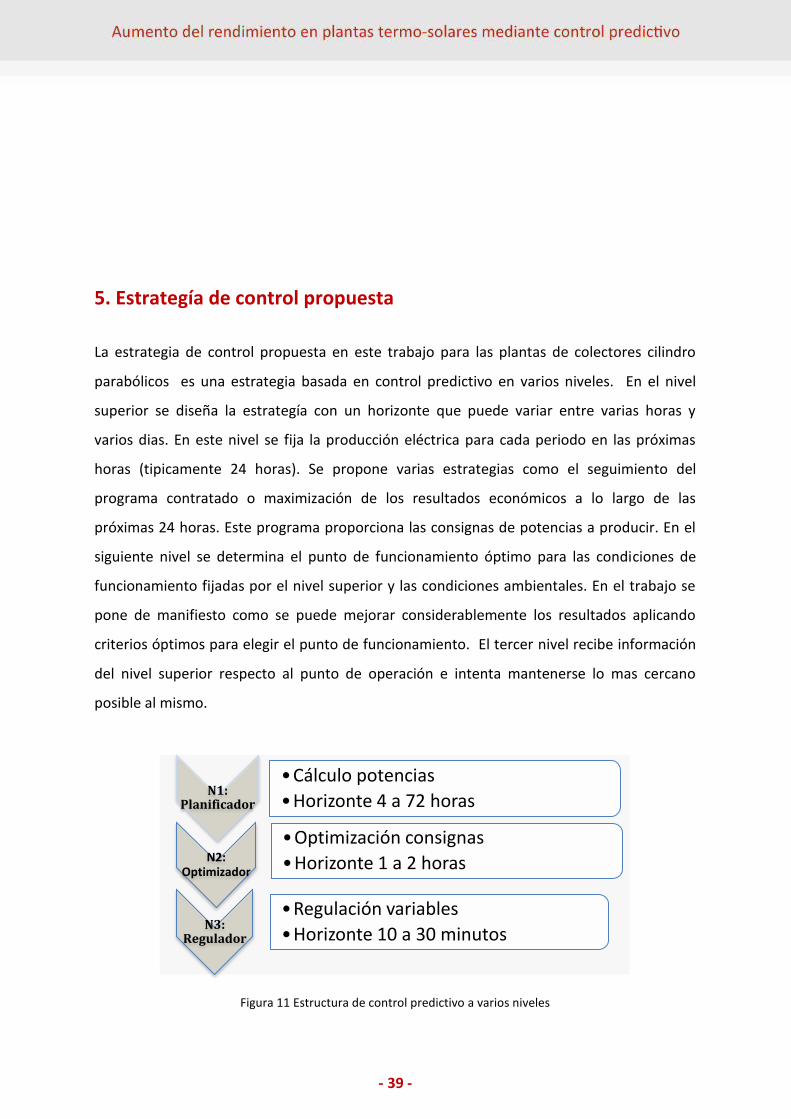
5. Estrategía de control propuesta
La estrategia de control propuesta en este trabajo para las plantas de colectores cilindro
parabólicos es una estrategia basada en control predictivo en varios niveles. En el nivel
superior se diseña la estrategía con un horizonte que puede variar entre varias horas y
varios dias. En este nivel se fija la producción eléctrica para cada periodo en las próximas
horas (tipicamente 24 horas). Se propone varias estrategias como el seguimiento del
programa contratado o maximización de los resultados económicos a lo largo de las
próximas 24 horas. Este programa proporciona las consignas de potencias a producir. En el
siguiente nivel se determina el punto de funcionamiento óptimo para las condiciones de
funcionamiento fijadas por el nivel superior y las condiciones ambientales. En el trabajo se
pone de manifiesto como se puede mejorar considerablemente los resultados aplicando
criterios óptimos para elegir el punto de funcionamiento. El tercer nivel recibe información
del nivel superior respecto al punto de operación e intenta mantenerse lo mas cercano
posible al mismo.
Figura 11 Estructura de control predictivo a varios niveles
N1: Planificador
•Cálculo potencias
•Horizonte 4 a 72 horas
N2: Optimizador
•Optimización consignas
•Horizonte 1 a 2 horas
N3: Regulador
•Regulación variables
•Horizonte 10 a 30 minutos
- 40 -
5.1. Controlador N1: planificador de la producción
Para formular el problema de optimización vamos a considerar una instalación donde
tenemos generación solar, un sistema de almacenamiento de energía y una carga local. El
sistema de generación de energía solar inyecta en cada periodo la energía . La energía
de salida hacia la red es y es la energía consumida por la carga local en cada periodo.
Suponemos que disponemos de un sistema de almacenamiento de energía . Llamaremos
(t) a la energía almacenada en el instante t y llamaremos (t) a la energía que
inyectamos en el periodo de tiempo t en el sistema de acumulación de energía.
De la ecuación de conservación de energía podemos escribir:
(1)
Como un criterio de signo consideraremos que las variables en el lado izquierda de la
ecuación son positivas cuando se inyecta energía en el nodo mientras que las variables en el
lado derecho de la ecuación son positivas cuando sale energía del nodo.
Las variables de decisión son (t) y (t). De la ecuación de balance de energia podemos
expresar como una función de
Tomaremos un intervalo de tiempo de una hora suponiendo que las variables con las que
operamos corresponden al valor medio de dicha variable durante la hora. El planteamiento
puede ser hecho de forma similar para periodos distintos a la hora. En el documento nos
referiremos siempre a energía activa. El mismo tipo de planteamiento se podría realizar
utilizando modelos apropiados al problema de la energía reactiva.
La energía solar máxima que se puede generar además de depender del índice de limpieza
de la atmósfera depende de factores tales como la localización geográfica, día del año, hora
solar, estado de suciedad de los colectores solares y estado general de la instalación ya que

- 41 -
parte de los colectores solares pueden estar no operativos debido a roturas o a operaciones
de mantenimiento. Consideremos que todos esos factores se agrupan en un índice ktv.
(3)
Consideraremos que el sistema está conectado a una red donde se puede verter la energía
producida o de donde se puede extraer la energía necesaria cuando el sistema no sea capaz
de producir la energía suficiente para alimentar la carga local. Supondremos que la energía
intercambiada con la red esta limitada por:
(6)
Supondremos que la energía mínima está limitada por un valor máximo que se puede verter
a la red y en el caso de extraer energía de la red supondremos que esta viene limitada por la
energía consumida por la carga local:
(7)
Consideramos para la energía almacenada un modelo lineal. Suponemos que la energía
almacenada se pierde con factor de pérdida por hora .
Si Estored(0) es la energía almacenada al principio del dia y no se almacena ni se extrae
energía del almacen, la energía almacenada en el instante n viene dada por:
Estored(n)= Estored(0)*(1- )n
Si se inyecta energía Es(t) en el instante t, al final del periodo n, la parte de esa energía que
todavia permanece en el almacen es Es(t)*(1- )(n-t). Por lo que la energía almacenada en el
instante n, suponiendo que se ha inyectado energía entre 0 y n viene dada por:

- 42 -
Los ingresos por la energia contratada en cada hora viene definido por:
donde e(t) es el precio marginal de la energía fijado por el proceso de casación antes
mencionado y Econtract(t) es la energía contratada, previamente ofrecida en el mercado
diario y convenientemente casada.
Consideraremos que los precios que van a alcanzar los precios de la electricidad en el
mercado diario se estiman. Notese que como estimación se pueden tomar los precios del
mercado diario del dia previo.
La desviación de la energía suministrada y contratada viene dada por:
Los ingresos por el suministro en cada hora vienen dados por:
donde suponemos que se penalizan las desviaciones entre la potencia energía suministrada
y la contratada.
Los ingresos a los largo del dia vendran dado por:
5.1.1. Optimización de la oferta al mercado
Consideraremos primero que conocemos la energía solar y eólica que se tendrá a lo largo de
las proximas 24 horas con un grado de certeza absoluto. Es decir que la estimación de la
energia solar Êsolar(t) que se puede producir coincide con el valor real que se va a poder
producir en el periodo t: Esolar(t)

- 43 -
Utilizando esta simplificación es posible conocer exactamente que energía podemos
producir en el futuro. En este caso no tendremos ninguna desviación respecto al programa
previsto porque se puede ofrecer al mercado la energía que se va a producir. El problema de
optimización consiste en:
Er(t),Es(t),Econtract(t) t=1.24
sujeto a (1) – (7)
donde le energía suministrada en cada periodo coincide con la energía contratada:
Er(t)=Econtract(t)
Dado que la energía eólica y solar son conocidas, y suponiendo que podemos vender toda la
energía, la decisión a tomar es cuanta de esa energía vamos a almacenar. El problema se
puede formular como:
Er(t),Es(t) t=1.24
sujeto a (1) – (7)
El problema a resolver es encontrar la energía a almacenar en cada instante de tiempo.
Si consideramos incertidumbres o posibles errores en la estimación de la energia solar
producida, el problema hay que resolverlo teniendo en cuenta las incertudumbres.
El aspecto mas incompleto de la optimización propuesta previamente es que no
consideramos errores en la predicción de la energía solar producida y que por lo tanto es
posible seguir el programa de su ministro sin problemas. Si este no es el caso, puede haber

- 44 -
errores entre la energía contratada y la realmente suministrada. La función objetivo se
puede formular como:
Er(t),Es(t) t=1.24
sujeto a (1) – (7)
donde la desviación es:
El problema es determinar la potencia contratada y potencia a almacenar que maximize la
función objetivo y utilizando predicciones de las energía solar.
La operación horaria consiste en establecer la energía a suministrar Er(t) y almacenar Es(t)
en cada hora de forma que se maximicen los ingresos por venta de energía. Emplearemos
varias estrategias.
5.1.2. Seguimiento de la potencia contratada
La idea principal de este modo de operación es el evitar las penalizaciones por desviaciones
en la producción respecto a la potencia contratada. El operador se limitará a seguir, dentro
de sus posibilidades, la potencia contratada. Cuando se disponga de más energía en el
campo solar que la contratada se almacenará el exceso de energía y cuando no disponga de
la energía suficiente se complementará con la energía almacenada.
La principal ventaja de esta política es que es simple y fácil de implementar. El inconveniente
es que no es necesariamente la forma óptima y ni siquiera garantizaría la minimización de
las penalizaciones por desviaciones en la demanda.

- 45 -
5.1.3. Minimización de las penalizaciones
Como ya se indicó anteriormente, un seguimiento de la energía horaria contratada no
implica necesariamente una minimización de los costos de las desviaciones entre la energía
contratada y la suministrada. La razón es que puede ocurrir que en dias en que se dispone
de menos energía solar que la prevista y no exista suficiente energía almacenada para hacer
frente a las desviaciones a lo largo de todo el dia, puede interesar reservar esa energía para
los momentos donde las penalizaciones en la producción son mayores. Efectos análogos
pueden ocurrir cuando la situación es la contraria.
El problema a resolver, cuando se utiliza este tipo de política es:
Er(t) t=t1.t2
sujeto a (1) – (7)
La variable de decisión en este caso es la energía a suministrar a la red. La energía
almacenada se considera conocida y la energía solar se considera también conocida en el
problema de optimización (en realidad habría que estimarlas).
5.1.4. Optimización de la producción
En este caso se trata de maximizar la producción menos las pérdidas. El problema a
optimizar viene dado por:
Er(t),Es(t) t=1.24
Sujeto a:

- 46 -
La energía almacenada al final del periodo se puede escribir como:
El problema de optimización se puede escribir como:
sujeto a:
El problema se puede resolver por un algoritmo de programación lineal que resuelven
problemas del tipo:
min. cT X
sujeto a:

- 47 -
El problema de optimización de la planta se puede reescribir como
Las variables de decisión son:
Que se puede reescribir como:
Las restricciones las reescribimos como:
1.
I.
II.
III.
IV.
V.
I.
II.
III.

- 48 -
1.a)
1.b)
2.
2.a)
2.b)
3.
3.a)
3.b)
4.

- 49 -
4.a)
4.b)
5.1.5. Estrategia combinada
Se propone una estrategia de generación de oferta y optimización conjunta apropiada en
caso de acudir al mercado diario de energía y para días donde no haya variaciones
sustanciales respecto al día anterior. Para eso necesitaríamos una buena predicción para la
energia que se puede producir al día siguiente. En el caso de sistemas solares, cuando no
hay cambios en la meteorología una buena predicción es la de la energía suministrada el dia
anterior. La idea es ofertar para el próximo día el resultado de optimizar la energía
suministrada el día previo con condiciones meteorológicas similares. Es decir:
Econtract (dia+1,t)= Er(dia,t)
Los resultados al aplicar el algoritmo en un periodo de un mes se puede ver en las figuras
siguientes. Se suponen perturbaciones en la radiación solar directa y variaciones en la
producción debidas a cambios en condiciones ambientales y a operaciones sobre la propia
planta como limpieza de espejos.
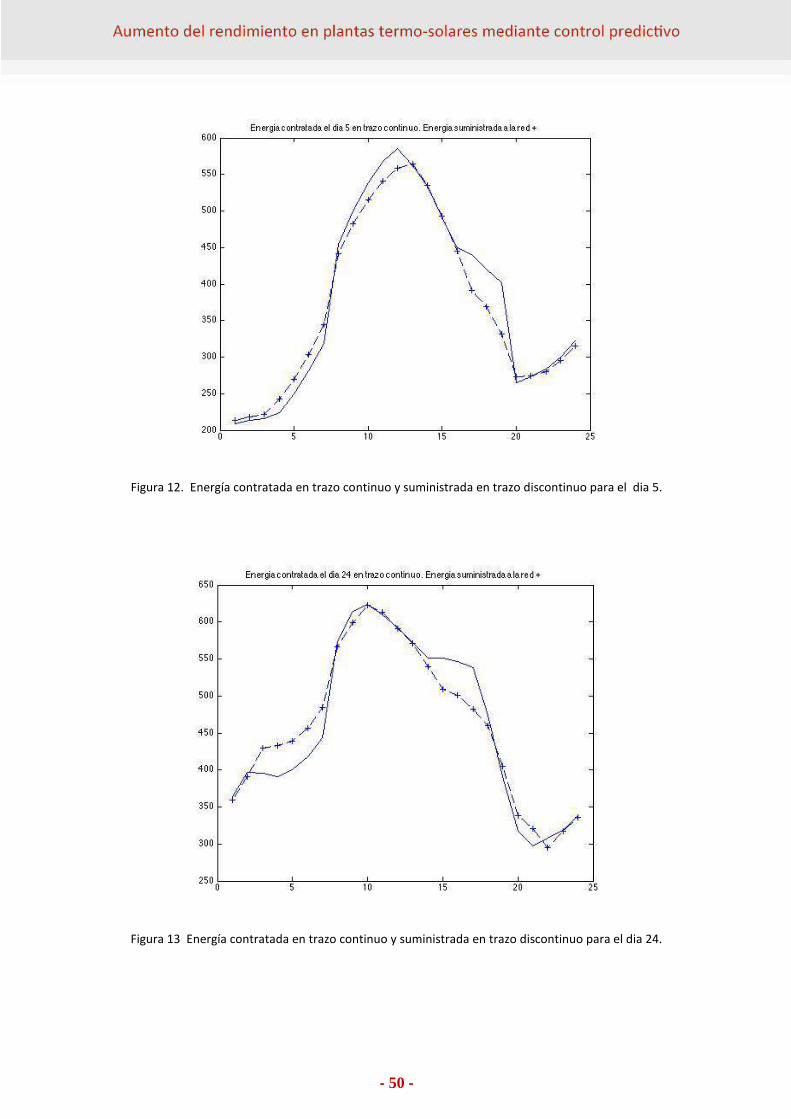
- 50 -
Figura 12. Energía contratada en trazo continuo y suministrada en trazo discontinuo para el dia 5.
Figura 13 Energía contratada en trazo continuo y suministrada en trazo discontinuo para el dia 24.
- 51 -
Las figuras 12 y 13 muestran las energías contratadas y producidas para los dias 3 y 24 del
mes simulado. La función objetivo considera penalizaciones en las diferencias entre potencia
contratadas y suministrada asi como precios de la energía eléctrica distinto en cada instante.
Los resultados de la simulaciones dependen como era de esperar del precio de la energía
eléctrica y de las penalizaciones por incumplimiento de contrato. Las ganancias en las
politicas óptimas depende de esos factores pero en todos los casos, las ganancias obtenidas
respecto a las politicas no óptimas consideradas han sido mayores del 0.5 %.
5.2. Controlador N2: Optimización de los puntos de funcionamiento
Un aspecto importante es como determinar el mejor punto de funcionamiento de la
intalación. Para ilustrar este punto vamos a tomar un modelo simple del campo de
colectores ACUREX de la P.S.A.
La decisión fundamental que hay que tomar en cada instante es como operar el campo. Esto
es, determinar la temperatura de operación del campo en función de las condiciones
ambientales fundamentales, radiación solar, temperatura ambiente, reflectividad de los
espejos, y estado de la planta en general. Por una parte, mientras mayor sea la temperatura
de operacíon mayor va a ser el rendimiento de la conversion pero por otra parte mayores
van a ser las perdidas térmicas en el campo de colectores. Para caudales bajos, las perdidas
de carga, y por consiguiente el consumo eléctrico de la bomba, es menor por tenerse que
bombear menos caudal y ser la viscosidad del aceite más pequeña para temperaturas altas.
El punto de funcionamiento óptimo depende de que valores toman las variables
fundamentales.
Considerando que la energía solar que recibimos en el periodo t sea una función de la
radiación solar en ese periodo, del instante de tiempo considerado y de la reflectividad de
los espejos que determinarán los ángulos de incidencia en los colectores, los factores de
sombra y la cantidad de energía que puede recogerse en ese periodo:
Esolar(t)=ETS(I(t),r(t),t)

- 52 -
Las perdidas térmicas en los colectores será una función que depende de las temperaturas
de operación del campo, de la temperatura ambiente, de la humedad y de la velocidad y
dirección el viento.
EPS(t)=ETP(Tout(t), Tin(t), Tamb(t), h(t),v(t),d(t))
El costo energético de impulsar el aceite en el campo depende fundamentalmente del
caudal de aceite que se está impulsando y de la temperatura del mismo a la salida y entrada
del campo.
Ebombas(t)=EEB(Tout(t), Tin(t),Q(t))
La temperatura de salida y de entrada del aceite dependen del caudal, de la energía solar
recibida y de las pérdidas térmicas.
Q(t)=fq(ETS(I(t),r(t),t)- ETP(Tout(t), Tin(t), Tamb(t), h(t),v(t),d(t)), Tout(t),Tin(t))
El ciclo de conversión de energía térmica a eléctrica tiene un rendimiento que depende de la
temperaturas de entrada y salida del aceite y de su caudal asi como de la temperatura del
medio ambiente.
Egenerada(t)= EEG(Tout(t), Tin(t), Q(t), Tamb(t))
Para maximizar la producción eléctrica se debe maximizar en cada periodo de tiempo la
energía eléctrica producida menos la energía eléctrica a gastar en las bombas y otros
servicios auxiliares. Es decir, el problema a resolver en cada instnte es minimizar
Egenerada(t)- Ebombas(t) = EEG(Tout(t), Tin(t), Q(t), Tamb(t))- EEB(Tout(t), Tin(t),Q(t))
Sustituyendo Q(t)
Egenerada(t)- Ebombas(t) = EEG(Tout(t), Tin(t), fq(ETS(I(t),r(t),t)- ETP(Tout(t), Tin(t), Tamb(t),
h(t),v(t),d(t)), Tout(t),Tin(t)), Tamb(t))- EEB(Tout(t), Tin(t), fq(ETS(I(t),r(t),t)- ETP(Tout(t), Tin(t),
Tamb(t), h(t),v(t),d(t)), Tout(t),Tin(t)))

- 53 -
Es decir, podriamos expresar la energía eléctrica neta que podriamos suministar en cada
periodo como:
Egenerada(t)- Ebombas(t) =f(Tout(t), Tin(t), I(t),r(t),t, Tamb(t), h(t),v(t),d(t))
Una función que depende de la temperatura de salida del campo, de la temperatura de
entrada del aceite al campo, de la raciación solar directa, del propio instante de tiempo, de
la temperatura ambiente, de la humedad y velocidad y dirección del tiempo. De todas estas
variables solo podemos controlar la temperatura de salida del aceite del campo y el salto
térmico, y podemos hacerlo de tal forma que se maximice la energía électrica producida en
cada instante. Es decir para cada intervalo de tiempo y conocida la irradiación solar, la
reflectividad de los espejos, la temperatura ambiente y demás condiciones ambientales, se
puede optimizar la energia electrica neta.
En el caso del campo de colectores cilindroparabólicos ACUREX de la P.S.A. estas funciones
pueden ser aproximadas en la forma siguiente: (Camacho et al, [1997]), (Carmona, [1985]),
(Camacho et al, [2012]):
La energía solar que llega a los tubos en un periodo de tiempo se puede calcular como:
Esolar(t)=Iefectiva(t) r(t)
donde Iefectiva(t) se calcula a partir de la radiación solar directa y del cálculo del vector solar y
la situación del campo con la que se determinan los factores de sombras y la cantidad de
energía recogida por los espejos en un periodo de tiempo y teniendo en cuenta la
reflectividad de los espejos.
La función que modela las perdidas térmicas que fue obtenida haciendo una serie de
ensayos se puede modelar por la función siguiente:
EPS(t)=-0.22-0.185 ((Tout+Tin)/2 – Tamb)+0.0066 ((Tout+Tin)/2 – Tamb)2
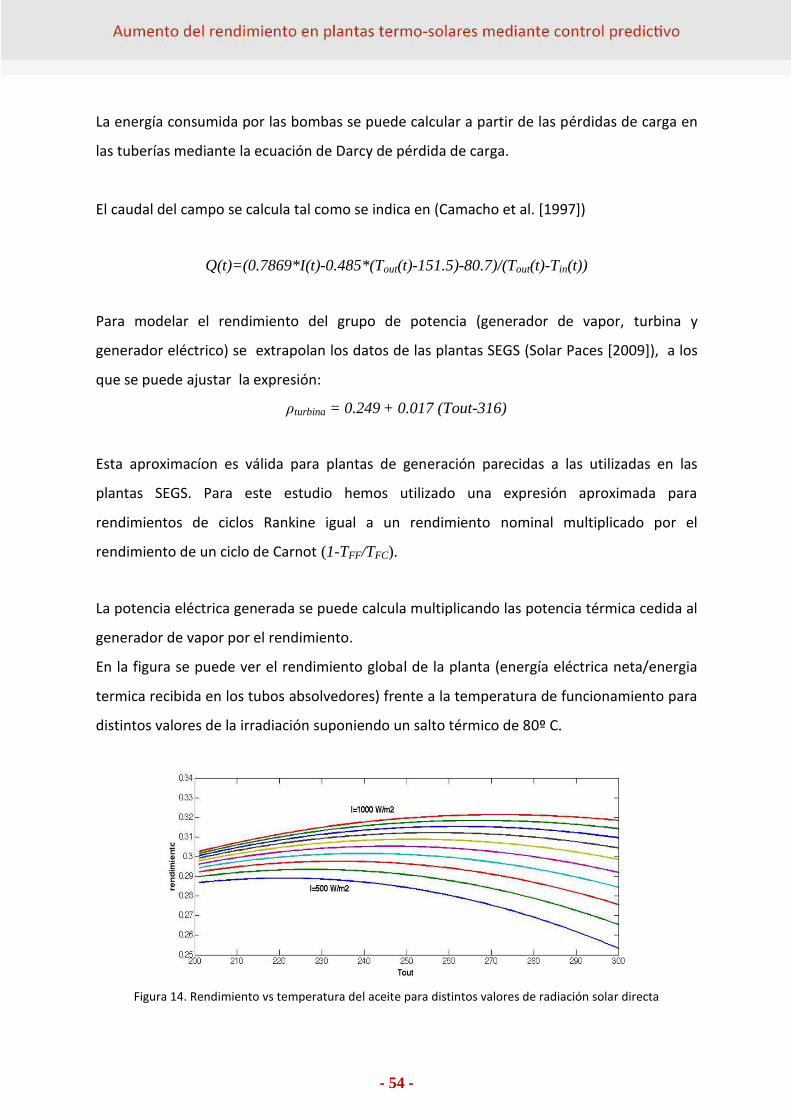
- 54 -
La energía consumida por las bombas se puede calcular a partir de las pérdidas de carga en
las tuberías mediante la ecuación de Darcy de pérdida de carga.
El caudal del campo se calcula tal como se indica en (Camacho et al. [1997])
Q(t)=(0.7869*I(t)-0.485*(Tout(t)-151.5)-80.7)/(Tout(t)-Tin(t))
Para modelar el rendimiento del grupo de potencia (generador de vapor, turbina y
generador eléctrico) se extrapolan los datos de las plantas SEGS (Solar Paces [2009]), a los
que se puede ajustar la expresión:
ρturbina = 0.249 + 0.017 (Tout-316)
Esta aproximacíon es válida para plantas de generación parecidas a las utilizadas en las
plantas SEGS. Para este estudio hemos utilizado una expresión aproximada para
rendimientos de ciclos Rankine igual a un rendimiento nominal multiplicado por el
rendimiento de un ciclo de Carnot (1-TFF/TFC).
La potencia eléctrica generada se puede calcula multiplicando las potencia térmica cedida al
generador de vapor por el rendimiento.
En la figura se puede ver el rendimiento global de la planta (energía eléctrica neta/energia
termica recibida en los tubos absolvedores) frente a la temperatura de funcionamiento para
distintos valores de la irradiación suponiendo un salto térmico de 80º C.
Figura 14. Rendimiento vs temperatura del aceite para distintos valores de radiación solar directa
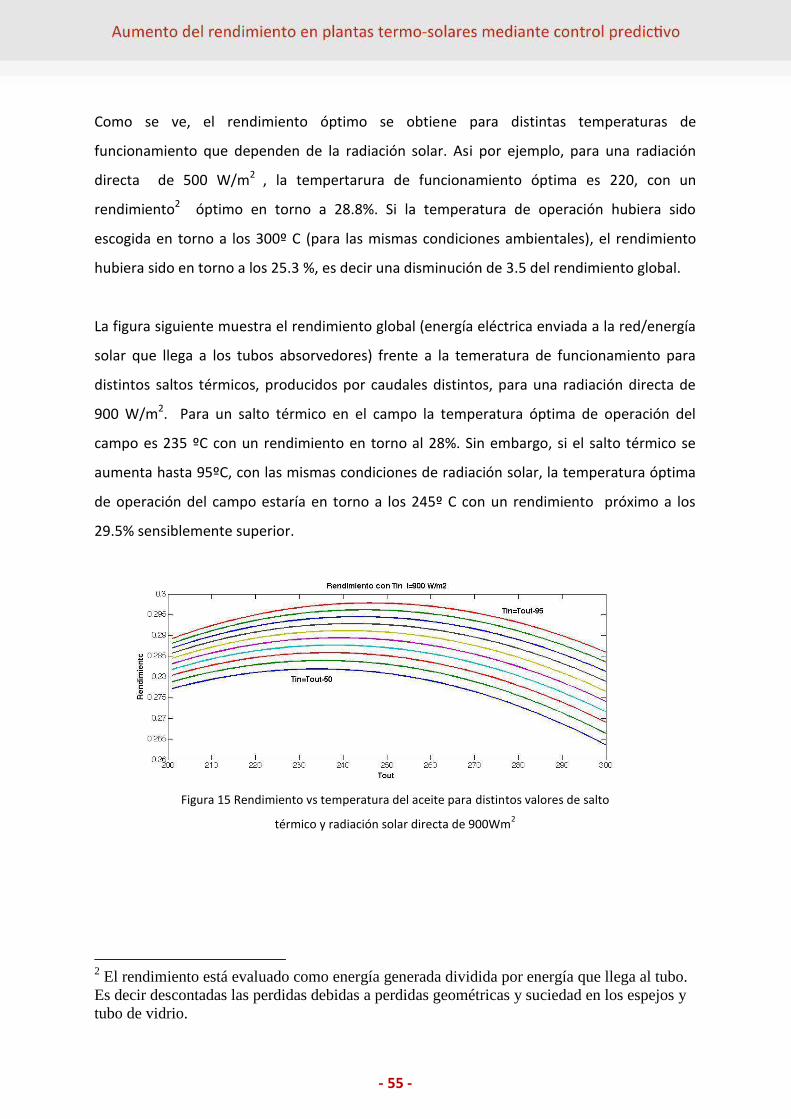
- 55 -
Como se ve, el rendimiento óptimo se obtiene para distintas temperaturas de
funcionamiento que dependen de la radiación solar. Asi por ejemplo, para una radiación
directa de 500 W/m2 , la tempertarura de funcionamiento óptima es 220, con un
rendimiento2 óptimo en torno a 28.8%. Si la temperatura de operación hubiera sido
escogida en torno a los 300º C (para las mismas condiciones ambientales), el rendimiento
hubiera sido en torno a los 25.3 %, es decir una disminución de 3.5 del rendimiento global.
La figura siguiente muestra el rendimiento global (energía eléctrica enviada a la red/energía
solar que llega a los tubos absorvedores) frente a la temeratura de funcionamiento para
distintos saltos térmicos, producidos por caudales distintos, para una radiación directa de
900 W/m2. Para un salto térmico en el campo la temperatura óptima de operación del
campo es 235 ºC con un rendimiento en torno al 28%. Sin embargo, si el salto térmico se
aumenta hasta 95ºC, con las mismas condiciones de radiación solar, la temperatura óptima
de operación del campo estaría en torno a los 245º C con un rendimiento próximo a los
29.5% sensiblemente superior.
Figura 15 Rendimiento vs temperatura del aceite para distintos valores de salto
térmico y radiación solar directa de 900Wm2
2 El rendimiento está evaluado como energía generada dividida por energía que llega al tubo. Es decir descontadas las perdidas debidas a perdidas geométricas y suciedad en los espejos y tubo de vidrio.

- 56 -
El rendimiento, además de depender de la radiación solar y de las condiciones de
funcionamiento de la planta, depende de las condiciones ambientales. El operar en el punto
óptimo, puede suponer aumentos sustanciales del rendimiento y por lo tanto de la
producción eléctrica. Para poner de manifiesto este aspecto, se optimiza las condidiones de
operación a lo largo de un día y se compara los resultados con lo que resultaría de operar en
torno a un punto de funcionamiento fijo. Se utiliza para el estudio el gráfico de radiación
solar de la figura siguiente correspondiente a un dia soleado.
Figura 16 Rendimiento vs temperatura del aceite para distintos valores de salto térmico
y radiación solar directa de 900W/m2
La optimización se hace por periodos horarios. Se suponen que la temperatura ambiente es
20 ºC. La produción eléctrica horaría es la dada por la gráfica.
Figura 17. Producción eléctrica óptima para los puntos de funcionamiento óptimos.

- 57 -
Los puntos óptimos de funcionamiento para cada hora se pueden ver en la figura siguiente:
Figura 18 Temperatura de referencia óptima.
Si se utiliza durante todo el periodo de tiempo un punto de funcionamiento fijo, por ejemplo
300ºC, la energía obtenida se puede ver en verde en la gráfica siguiente donde se compara
con la potencia obtenida utilizando un punto óptimo de funcionamiento en cada instante.
Figura 19 Producción eléctrica con Tout óptima (negro) vs producción con Tout de 300ºC.
como se puede apreciar, se consiguen incrementos en la producción aplicando una política
óptima. Se han supuesto que los elementos no necesitan ser arrancados. La figura siguiente
muestra el ahorro en KWh obtenido al operar el campo de forma óptima con respecto a
operarlo con la temperatura constante.

- 58 -
Figura 20 Incremento de producción eléctrica con Tout óptima con respecto
a producción con Tout constante.
Si se extrapolan este aumento de producción a una planta de 50 MWe, el aumento podria
ser de 20000 KWh al dia. Considerando las primas (FiT), el incremento de producción puede
representar alrededor de 6000 euros/dia para una planta de 50MWe.
5.3. Controlador N3: regulación
En el nivel 3 se considera el control de las variables fundamentales. El objetivo es mantener
a las varaiables de proceso lo más cerca posible de las referencias marcadas en el nivel de
optimización de consignas.
La dificultad en controlar campos de colectores cilindro-parabolicos, tal como se indica en
(Camacho et al. [1997]), radica en que:
1) La variable manipulable no es el caudal de combustible inyectado, y en consecuencia
la potencia, como ocurre en otros sistemas de producción de energía eléctrica. En el
caso de centrales solares, la energía que proviene del sol no puede ser manipulada.
Se intenta aprovechar al máximo la energía recibida, y aunque los colectores pueden
desenfocarse y por lo tanto reducir la energía que llega a los colectores, esta politica
implica no utilizar toda la energía disponible. Por otra parte no podemos disponer de
más energía solar de la que llega al campo. La forma de controlar la temperatura de
salida del fluido de intercambio es manipulando el caudal que atraviesa el campo de
colectores. Si se aumenta el caudal, disminuye la temperatura de salida y si se
- 59 -
decrementa el caudal aumenta la temperatura de salida del campo. Es más, la fuente
principal de energía no solamente no es una variable que podemos manipular sino
que puede ser una fuerte perturbación.
2) El sistema es no lineal, y tiene un comportamiento no simétrico, con constantes de
tiempo distintas cuando el sistema incrementa su temperatura o la decrementa.
3) La dinámica del sistemas está carecterizada por retardos que aumentan con las
dimensiones del campo.
4) Los retardos son variables y dependen de las condiciones de funcionamiento. Los
retardos dependen fundamentalmente del caudal. Para bajos caudales los retardos
son mucho mayores que para caudales altos.
5) El sistema esta sometido a restricciones de operación, como temperatura máxima
del aceite o caudales mínimos para asegurar flujo turbulento e intercambio de calor
entre el tubo de metal y fluido adecuados.
El control de este tipo de sistemas se han propuesto estructuras de control avanzadas para
hacer frente a los problemas mencionados previamente. En (Camacho et al [2007]) y
(Camacho et al. [2012]) se puede encontrar las aportaciones fundamentales en este campo.
Los primeros trabajos en este sentido fueron realizados por el autor de este trabajo que
dirigió a mediado de la decada de los 80 la tesis doctoral de Ricardo Carmona y de Francisco
Rodríguez Rubio que versaban sobre el modelado del campo de colectores cilindro-
parabólicos ACUREX y sobre un controlador adaptativo para dicho campo de colectores
distribuidos.
Sobre este campo de colectores se han ensayado distintos tipos de controladores desde los
clásicos PIDs hasta controladores adaptativos o controladores basados en modelos. Un
aspecto fundamental para el desarrollo de estos trabajos fue el desarrollo de un modelo
dinámico de simulación de parámetros distribuidos que se realizó en la tesis de Ricardo
Carmona [1985] tesis que fue co-dirigida por Eduardo Fernández Camacho y Valeriano Ruiz
- 60 -
Hernández. El primer de los controladores avanzados para esta planta fue un controlador
adaptativo desarrollado por el autor en colaboración con otros investigadores (Camacho et
al. [1986, 1992]), (Berenguel et al. [1994]).
A este campo se le han aplicado diversas estrategias de control predictivo (Camacho y
Bordons, 2004]), tales como control predictivo, adaptativo y otras (Camacho and Berenguel
[1994a], Camacho et al. [1992], control predictivo con ajustes de ganancia (Camacho y
Berenguel [1994b], Lemos et al. [2000]), control robusto (Camacho and Berenguel [1997], de
la Parte et al. [2008]). Mas recientemente se ha aplicado un controlador robusto con
capacidad de seguimiento (Limon et al. [2008a]).
El control que se propone es un controlador predictivo con ajuste de ganancia como se
sugiere en (Camacho et al. [1997]) y (Camacho et al. [2012]). De todos los controladores
aplicados en la planta ACUEX, este ha sido el contolador ue mejores resultados ha
proporcionado. La idea fundamental es diseñar controladores predictivos en distintos
puntos de funcionamiento y un esquema supervisor que transfiera de un controlador a otro
de forma suave. El esquema de control se puede ver en la figura 21, donde se puede ver el
controlador GPC con un compensador “feedforward” en serie.

- 61 -
Figura 21 Esquema de control predictivo de orden elevado.
Algunos de los resultados de este controlador en el campo ACUREX de la Plataforma Solar
de Almería se pueden ver en las figuras 22 y 23. En la figura 22 se puede ver la evolución de
la temperatura de salida del campo de colectores ante cambios en la referencia. Los
cambios en la referencia se producen antes un cambio suave de la radiación solar directa.
Como se puede ver, la temperatura del campo sigue muy bu¡ien a los cambios de consignas.
Figura 22 Evolución de la temperatura de salida del campo y radiación solar directa.
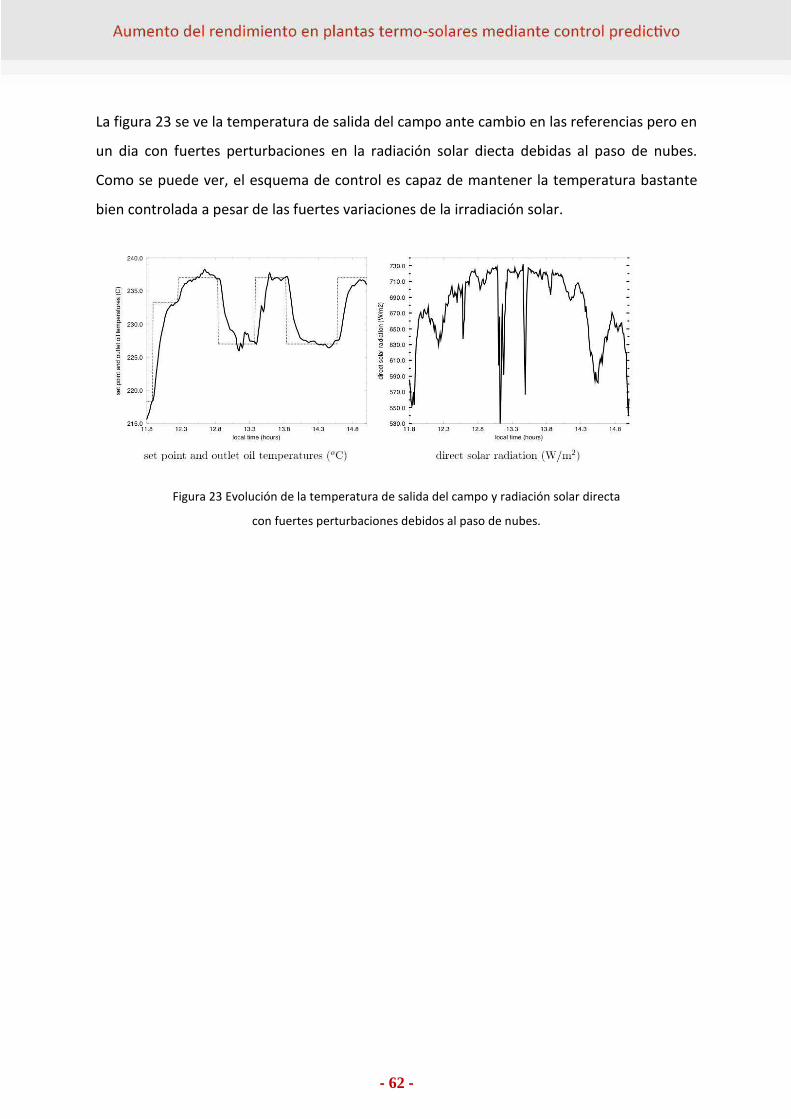
- 62 -
La figura 23 se ve la temperatura de salida del campo ante cambio en las referencias pero en
un dia con fuertes perturbaciones en la radiación solar diecta debidas al paso de nubes.
Como se puede ver, el esquema de control es capaz de mantener la temperatura bastante
bien controlada a pesar de las fuertes variaciones de la irradiación solar.
Figura 23 Evolución de la temperatura de salida del campo y radiación solar directa
con fuertes perturbaciones debidos al paso de nubes.

- 63 -
6. Referencias
Abengoa-Solar. Plataforma solucar: Planta ps20, www.abengoasolar.com/sites/solar, (2009). Ajona, J.I. Solar Thermal Electricity Generation, capítulo 1, Ed. CIEMAT, Madrid. (1998). Arahal, M.R., M. Berenguel, and E. F. Camacho. Nonlinear neural model-based predictive control of a solar plant. In Proceedings of the European Control Conference ECC97. (July 1997).
Berenguel M., F.R. Rubio, A. Valverde, M.R. Arahal, E.F. Camacho, and M. López. “An artificial vision-based control system for automatic heliostat position in offset correction in a central receiver solar power plant,” Solar Energy, vol. 76, no. 5, pp. 523-653, ISSN 0038-092X. (June 2004).
Berenguel, M., Camacho, E.F. Frequency-based adaptive control of systems with antiresonance modes. Control Engineering Practice, 4(5), 677-684. (1996). Berenguel, M., E. F. Camacho, and F.R. Rubio. Simulation software package for the Acurex _eld. Dpto. de Ingeniería de Sistemas y Automática, ESTI Sevilla, Spain. (1994). Berenguel, M., M.R. Arahal, and E.F. Camacho. Modeling free response of a solar plant for predictive control. Control Engineering Practice, 6:1257–1266. (1998) Berenguel, M., F.R. Rubio, A. Valverde, P.J. Lara, M. R. Arahal, E. F. Camacho, and M. Lopez. An artificial vision-based control system for automatic heliostat positioning offset correction in a central receiver solar power plant. Solar Energy, 76-5:523–653. (2004). Blanco, M., D. Alarcon, T. Lopez, and M. Lara. Computing the solar vector. Solar Energy, 70:431–441. (2001). Bose, B. Global warming: Energy, environmental pollution, and the impact of power electronics. IEEE Industrial Electronics Magazine, 4(1):6–17. (2010).
Camacho E.F., T. Samad, M. Garcia-Sanz, and I. Hiskens, Control for Renewable Energy and Smart Grids, IEEE CSS report on the impact of control technologies. http://www.ieeecss.org/general/impact-control-technology (2010).
Camacho, E.F., M. Berenguel, F.R. Rubio, and D. Martinez. Control of Solar Energy Systems. Berlin: Springer Verlag, (2010).
Camacho, E.F., F. Rubio, M. Berenguel, and L. Valenzuela. “A survey on control schemes for distributed solar collector fields (part 1 and 2),” Solar Energy, vol. 81, pp. 1240-1272, (2007).

- 64 -
Camacho, E.F., F.R. Rubio y F. M. Hughes, Self-tuning control of a solar power plant with a distributed collector field, IEEE Control System Magazine, vol 12, n.2, pp 72 – 78. (1992).
Camacho, E.F., R. Rubio and J.A. Gutierrez, “Modelling and simulation of a solar power plant with a distributed collector system,” Preprints of the IFAC Symp. on Power Systems Modelling and Control Applications, pp 11.3.1-1 1.3.5, Brussels. (1988).
Camacho, E.F., F.R. Rubio and R. Carmona, Adaptive Control of the ACUREX Field, IEA/SSOS Solar Thermal Power Plants. Vol.: II. Pp.: 5.2.1-5.2.18. (Ed.: P. kesserling y C.S. Selvage) Springer Verlag. (1986).
Camacho, E.F., Berenguel, M., Rubio, F. Advanced Control of a Solar Plants. Ed. Springer-Verlag, London,Great Britain. (1997). Camacho, E.F. and M. Berenguel. Aplication of Generalized Predictive Control to a Solar Power Plant. OxfordUniversity Press, Oxford, UK. (2004) Camacho, E.F. and M. Berenguel. Application of generalized predictive control to a solar power plant. In The Third IEEE Conference on Control Applications, Glasgow UK, August (1994) Camacho, E.F. and C. Bordons. Model Predictive Control. Springer-Verlag, second edition, (2004) Camacho, E.F., R. Carmona, and F.R. Rubio. Adaptive control of the ACUREX _eld. Springer Verlag, London. (1986). Camacho, E.F., F.R. Rubio and J.A. Gutierrez. Modelling and simulation of a solar power plant with a distributed collector system. In Proceedings of the International IFAC Symposium on Power Systems Modeling and Control. (1988) Camacho, E.F., F.R. Rubio, and F.M. Hugues. Self-tuning control of a solar power plant with a distributed collector field. IEEE Control Systems Magazine, 12:72–78. (1992). Camacho, E.F., M. Berenguel, and F.R. Rubio. Advanced control of solar power plants. Springer Verlag, London. (1997) Camacho, E.F., F.R. Rubio, M. Berenguel, and L. Valenzuela. A survey on control schemes for distributed solar collector fields. partI: modeling and basic control approaches. Solar Energy, 81:1240–1251. (2007). Camacho, E.F., F.R. Rubio, M. Berenguel, and L. Valenzuela. A survey on control schemes for distributed solar collector fields. part II: advanced control approaches. Solar Energy, 81:1252–1272. (2007). Camacho, E.F. and M. Berenguel. Robust Adaptive Model Predictive Control of a Solar Plant with Bounded Uncertainties. International Journal of Adaptive and Signal Processing, 11:311–325. (1997). Carmona, R. Análisis, Modelado y Control de un Campo de Colectores Solares Distribuidos con Sistema de Seguimiento de un eje. Tesis Doctoral, Universidad de Sevilla. (1985)
Carmona, R. Analysis, Modeling and Control of a Distributed Solar Collector Field with a One-axis Tracking System. PhD thesis, Universidad de Sevilla. (1985). Carrasco, J.M., L.G. Franquelo, J.T. Bialasiewicz, E. Galvan, R.C.P. Guisado, M.A.M. Prats, J.I. Leon, and N. Moreno-Alfonso. Power-electronic systems for the grid integration of renewable energy sources: A survey. IEEE Transactions on Industrial Electronics, 53(4):1002 – 1016. (2006).

- 65 -
Chen, Y.T., B. H. Lim, and C. S. Lim. Sun tracking formula for heliostats with arbitrarily oriented axes. Journal of Solar Energy Engineering, 128:245–251. (2006). Cirre. Cristina M., L. Valenzuela, M. Berenguel, E.F. Camacho, Control de Plantas Soalres con generación automatica de consignas. RIAI. (2003). Coito, F., J.M. Lemos, R.N. Silva, and E. Mosca. Adaptive control of a solar energy plant: exploiting acceptable disturbances. International Journal of Adaptive Control and Signal Processing, 11:327–342. (1997). Cutler, C. R., & Ramaker, B. L. (1979). Dynamic matrix control—acomputer control algorithm. AICHE national meeting, Houston,TX, April 1979 De Laquil, P, B. Kelly, and R. Lessley. “Solar One Conversion Project,” Solar Energy Materials, vol. 24, no. 1-4, pp. 151-161, (December 2, 1991). Duffie, J.A. Beckman, D. (1991). Solar Engineering of Thermal Processes. John Wiley & Sons, Inc. New York, USA. Farkas, I. and I. Vajk. Experiments with internal model based controller for acurex field. In Proceedings of the 2nd Users Workshop IHP Programme, CIEMAT. (2002). García Martín, F.J., M. Berenguel, and A. Valverde E. F. Camacho. Heuristic knowledge-based heliostat field control for the optimization of the temperature distribution in a volumetric receiver. Solar Energy, 66(5):355–369 (1999) García-Martín F.J., M. Berenguel, A. Valverde, and E.F. Camacho. “Heuristic knowledge-based heliostat field control for the optimization on the temperature distribution in a volumetric receiver,” Solar Energy, vol. 66, no. 5, pp. 355-369, ISSN 0038-092X. (August 1999). Grena, R. An algorithm for the computation of the solar position. Solar Energy, 82:462–470. (2008). Johansen, T.A., I. Petersen, and O. Slupphaug. Explicit Suboptimal Linear Quadratic Regulation with input and state constraints. In Proc. 39th IEEE Conf. on Decision and Control. (December 2000). Juuso E., Valenzuela L. Adaptative Intelligent Control of a Solar Collector Field. En Final Programme & Proceedings of EUNITE 2003. Ed. Wissenschaftsverlag Mainz, Aachen, pp. 26-35. (2003). Kearney, D. “Solar Electric Generating Stations (SEGS),” IEEE Power Engineering Review, vol. 9, no. 8, pp. 4–8, doi:10.1109/MPER.1989.4310850. (1989). King, D.L. and D.E. Arvizu. Heliostat characterization at the central receiver test facility. Journal of Solar Energy Engineering, 103:82–88. (1981). Klein, A.A., J.A. Duffie and W.A. Beckman. Transient considerations of flat-plate solar collectors. Transaction of the ASME Journal of Engineering and Power, 96: 333–344. (1974) Lemos, J.M. L.M. Rato, and E. Mosca. Integrating predictive and switching control: Basic concepts and an experimental case study. In F. Allgower and A. Zheng, editors, Nonlinear Model Predictive Control, number 1, pages 181–190. (2000). Limon, D., I. Alvarado, T. Alamo, M.R. Arahal, and E. F. Camacho. Robust control of the distributed solar collector field acurex using mpc for tracking. In IFAC World Congress. ( 2008). Limon, D., I. Alvarado, T. Alamo, and E. F. Camacho. MPC for tracking piecewise constant references for constrained linear systems. Automatica, 44(9):2382–2387. (2008).

- 66 -
Limon, D., I. Alvarado, T. Alamo, and E.F. Camacho. Robust tube-based mpc for tracking of constrained linear systems with additive disturbances. Journal of Process Control, 20:248–260. (2010). Liserre, M., T. Sauter, and J.Y. Hung. Future energy systems: Integrating renewable energy sources into the smart power grid through industrial electronics. IEEE Industrial Electronics Magazine, 4(1):18–37. (2010). Meaburn, A. and F.M. Hughes. A simple predictive controller for use on large scale arrays of parabolic trough collectors. Solar Energy, 56:583–595. (1996). Meaburn, A. and F.M. Hughes. Feedforward control of solar thermal power plants. Journal of Solar Energy Engineering, 119:52–60. (1997). Meaburn, A., Hughes F.M., Resonance characteristics of distributed solar collector fields. Solar Energy, 51, 215-221. (1993) National Academy of Engineering. Grand Challenges for Engineering [Online]. Available at http://www.engineeringchallenges.org/. (2008) Omel, (http:2//www.omel.es/inicio/normativa-de-mercado/reglas-omel), (2011)
Perez de la Parte, M., C.M. Cirre, E. F. Camacho and M. Berenguel. Application of predictive sliding mode controllers to a solar plant. IEEE Transaction on Control Systems Technology, 16:819–825. (2008) Pickhardt, R. and R.N. Silva. Application of a nonlinear predictive controller to a solar power plant. In Proceedings of the 1998 IEEE International Conference on Control Applications. (1998). Price, H., D. Kearney, and I. Replogle. Update on the preformance and operation of segs iii-vii. In ASME International Solar Energy Conference. (1990). Rato, L., R.N. Silva, J.M. Lemos, and F. Coito. Multirate musmar cascade control of a distributed solar field. In Proceedings of the European Control Conference ECC97. (July 1997). Richalet J. , A. Rault, J.L. Testud, and J. Papon. Algorithmic Control of Industrial Processes. In 4th IFAC Symposium on Identification and System Parameter Estimation. Tbilisi USSR, (1976). Richalet J. , A. Rault, J.L. Testud, and J. Papon. Model Predictive Heuristic Control: Application to Industrial Processes. Automatica, 14(2):413–428, (1978). Rorres, C., A. Orbach, and R. Fischl. Optimal and suboptimal control policies for a solar collector system. IEEE Transactions on Automatic Control, 25: 1085–1091. (1980). Rubio, F.R., E.F. Camacho y R. Carmona, Control adaptativo del campo de colectores distribuidos ACUREX de la planta Solar SSPS de Almería, Regulación y Mando Automático. Vol 19, pp 130-143. (1985). Rubio, F.R., F.M. Hughes and E.F. Camacho, Self tuning PI Control of a Solar Power Plant Proceedings from the 3rd IFAC Adaptive Systems in Control and Signal Processing, pp 335-340, Ed.: M.J. Grimble, M.A. Johnson, D.H. Owens and T.S. Durrai. Elsevier, Glasgow. (1989). Rubio, F.R., E.F. Camacho and R. Carmona, Application of a Self-tuning Regulator to a Solar Power Plant Proceedings of the 7th IFAC Symposium on Digital Computer Applications to Process Control, pp 263-269. Elsevier. Viena. (1985). Silva, R.N., L.M. Rato, and J.M. Lemos. Time scaling internal state predictive control of a solar plant. Control Engineering Practice, 11:1459–1467. (2003).

- 67 -
Stone, K.W. and C.W. Lopez. Evaluation of the solar one track alignment methodology. Journal of Solar Energy Engineering, 103:521–526. (1995). Stuetzle, T., N. Blair, J.W. Mitchell, and A. Beckman. Automatic control of a 30mwe segs vi parabolic trough plant. Solar Energy, 76:187–193. (2004). Solar Paces, Solar parabolic trough. http://www.solarpaces.org/CSP_Technology/docs/solar_trough.pdf SolarPaces. Concentrating Solar Power Gobal Outlook 09 [Online]. Disponible en http://www.solarpaces.org/Library. (2009). The Improving Human Potential Programme. Ed. CIEMAT. 2002, 2003 Training and Mobility of researchers programme at Plataforma Solar de Almería. Ed. CIEMAT. 1997,1998. U.S. Department of Energy. Solar Energy Technologies Program - 2009 Annual Report, 2009. Valenzuela L., E. Zarza, M. Berenguel, and E.F. Camacho. “Direct steam generation in solar boilers,” IEEE Control Systems Magazine, vol. 24, no. 2, pp. 15-29, (2004). Valenzuela, L., E. Zarza, M. Berenguel, and E. F. Camacho. Direct steam generation in solar boilers. IEEE Control Systems Magazine, 24(2):15–29. (2004). White House. Weekly address [Online], http://www.whitehouse.gov/blog/010/07/03/weekly-address-a-solar-recovery#. (Julio 3, 2010). Zarza, E., L. Valenzuela, J. Leon, K. Hennecke, M. Eck, H.D. Weyers, and M. Eickhoff. The diss project: Direct steam generation in parabolic troughs. In Proceedings of ASME International Solar Energy. (April 2001).

- 68 -
7. Agradecimientos
Este trabajo se basa en trabajos previos realizados por el autor en colaboración con una
serie de investigadores: Ricardo Carmona, de cuya tesis doctoral fui co-director y con el que
desarrollamos el primer modelo de parámetros distribuidos del campo de colectores.
Francisco Rodríguez Rubio, cuya tesis doctoral dirigí y con el que desarrollamos
controladores adaptativos y Manuel Berenguel, cuya tesis dirigí, y con el que hemos
desarrollado numerosos trabajos en la planta cilindro parabólica, la planta CESA I y el horno
solar de la P.S.A. Otras personas que han colaborado conmigo en estos trabajos son: J.A.
Gutiérrez, M. Hughes, J. Normey, M. R. Arahal, L. Valenzuela, E. Zarza, C. M. Cirre, M.P. Parte
e I. Alvarado. También me gustaría mencionar a mis estudiantes de doctorado que
actualmente están trabajando sobre control de sistemas de energía solaro control
predictivo: Antonio Gallego Len, Cristina Martin Macareno, Jose ramón Domínguez Frejo y
Filiberto Fele. También me gustaría mencionar al personal de la P.S.A., entre los que quiero
destacar a Diego Martínez, Antonio Valverde y Luis Yebra, cuya ayuda ha sido fundamental
para desarrollo de muchos de los trabajos que han servido de base para este. También me
gustaría mencionar a las personas que han trabajado conmigo en el contexto de control
predictivo: Carlos Bordons, Miguel Angel Ridao, Teodoro Alamo, Daniel Limón, Daniel
Rodríguez, David Muñoz de la peña, Julio Normey, Winston Garcia, Darine Zambrano,
Mercedes Perez de la Parte, Asun Zafra, Amparo Nuñez, Mirko Fiaccini, Antonio Ferramosca,
Jose Maestre entre otros.
- 69 -
A todas estas personas y a las instituciones y empresas que han financiado los trabajos que
han servido de base a este, como la Junta de Andalucia, el Ministerio de Ciencia y
Tecnologia, la Comisión Europea, Abengoa Solar NT, Telvent, CIEMAT me gustaria
expresarles mi más profundo agradecimiento.

- 70 -
8. Conclusiones
El principal resultado de esta investigación es la propuesta de una estructura de control a
tres niveles basada en control predictivo para centrales termo-solares cilindro parabólicas. El
trabajo pone de manifiesto como se puede aumentar la producción de energía eléctrica. Al
utilizar técnicas de control predictivo. El estudio se ha hecho sobre modelos del campo de
colectores distribuido Acurex de la P.S.A. Al extrapolar el estudio a plantas cilindro
parabólicas de 50 MWe y considerando las primas, se calculan unas posibles ganancias en
torno a los 6000 Euros/dia.
La estructura propuesta funciona a tres niveles, en el nivel superior, se realiza una
planificación de la producción a 24 horas utilizando un horizonte deslizante. Se determina a
este nivel la producción en cada hora. En el nivel intermedio, a partir de la producción
programada para cada periodo horario y del conocimiento de la radiación solar, del resto de
las condiciones ambientales y del estado de la planta se determina los puntos de
funcionamiento óptimos. En el tercer nivel se realiza el control que teniendo en cuenta la
dinámica del sistema ajusta las variables manipulables para mantener a este lo mas cercano
posible a los puntos de funcionamiento óptimos.