^asp^G^Ti · 2019. 4. 7. · ^asp^g^ti" escuela politÉcnic nacionaa l facÍltad jde ingenierÍa...
457
ESCUELA POLITÉCNICA NACIONAL FACÍLTAD JDE INGENIERÍA ELÉCTRICA CONTROL ANÁLOGO DE PRESIÓN MECÁNICA TESTS PREVIA A LA OBTENCIÓN. DEL TITULO DE rNípENXERQ EN ELECTRONXEA Y CONTROL MARIO EDUARDO PAREDES GARCÍA JUNIO - 1992
Transcript of ^asp^G^Ti · 2019. 4. 7. · ^asp^g^ti" escuela politÉcnic nacionaa l facÍltad jde ingenierÍa...

asp G Ti"
ESCUELA POLITÉCNICA NACIONAL
FACÍLTAD JDE INGENIERÍA ELÉCTRICA
CONTROL ANÁLOGO DE PRESIÓN MECÁNICA
TESTS PREVIA A LA OBTENCIÓN. DEL TITULO
DE rNípENXERQ EN ELECTRONXEA Y CONTROL
MARIO EDUARDO PAREDES GARCÍA
JUNIO - 1992

CERTIFICACIÓN
Certifico que esiba tesis ha sido
real izada en su tQ.^tiffcidííad -. por el
Señor Mario Eduardo PÉ^edes García.
Ing . Marco Barragán B.

AGRADECIMIENTO
Mi sincero agradecimiento al
Señor Ing. Marco Barragán B.
por su valioso aporte en la
dirección y realización de la
presente Tesis.

A quienes lo hicieron posible:
mis padres, hermanos, y mi hijo
San tiago.
CONTENIDO
CAPITULO I INTRODUCCIÓN
1.1 Importancia y objetivo
1.2 Contenido
CAPITULO II SERVOMECANISMOS
2-1 Servomecanismos
2.2 Sistemas de control
2.3 Servesistema a implementarse
2.4 Función de transferencia del sistema propuesto
SENSORES - TRANSDUCTORES
3.1 .: Sensores, •acondicionadores , "transductores
ÍPCÍ2" Sensores de presión mecánica y fuerza
3.3 Sensores especiales
3.4 Tipo de transductor que se emplea
CAPITULO IV DISECO Y CONSTRUCCIÓN DEL PROTOTIPO
4.2
Introducción y concepción del diseño
Diseño y construcción del servomecanismo
Diseño y construcción deisensor
Diseño y construcción eléctrica, electrónica
4.5 Construcción y ensamblaje total
4.6 Medición de parámetros y función de transferencia
del sistema construido
CAPITULO V : EXPERIMENTACIÓN Y RESULTADOS
5.1 Pruebas de la fuente regulada
5.2. Sensores de presión y fuerza
5-3 Servomotor, sistema de engranajes y placa de
ajuste
5.4 Amplificador de potencia
5.5 Pruebas totales del prototipo construido
CAPITULO VI : CONCLUSIONES
6-1 Análisis de la función de transferencia real del
servomecanismo "Control Análoga de Presión
Mecánica"
-S>¿ - Conclusiones de las mediciones del Capitula V
6.3 Experiencias y comentarios sobre el desarrolia
del presente tema de tesis.
ANEXOS
BIBIOGRAFIA
ÍNDICE

CAPTTULO I
INTRODUCCIÓN
1.1 IMPORTANCIA Y OBJETIVOS
1.2 CONTENIDO

CAPITULO I
1.1 IMPORTANCIA Y OBJETIVO
"CONTROL ANÁLOGO DE PRESIÓN MECÁNICA", es el titulo
de la presente tesis, en la misma que se construye un
prototipo experimental de servomecanismo, cuya operación
consiste en sostener objetos de peso y característicasi
determinados (fijas), con una presión mínima necesaria
para que los cuerpos no resbalen y caigan.
Previamente a la construcción se hace un estudio
teórico de servomecanismos, sensores, transductores,
sistemas de control, circuitos electrónicos de control;
así como también la parte mecánica de todo el conjunto de
piezas.
Básicamente el control emplea sensores de presión y
fuerza mecánica; el valor referencial lo efectúa mediante
el sensor de fuerza (balanza referencial), el mismo que
se compara con el valor medido proveniente de las placas
de ajuste a través del sensor de presión; resultado de
esta comparación es la señal de error que luego de ser
amplificada al imenta al servomotor que mueve toda la
planta (servomecanismo).
En el desarrollo de la presente tesis se nota que no
se puede llevar una secuencia estricta de: estudio,
modelación matemática, análisis teórico, diseño, y
construcción; ya que se emplean algunas piezas o partes
tipo "chatarra", y se ha tratado de acoplarlas al
prototipo; entonces en todo el desarrollo se van
combinando las actividades antes indicadas a fin de
llegar a la construcción del servomecanismo.
Se puede hacer una semejanza del prototipo como una
especie de mano mecánica capaz de sostener objetos sin
dañarlos, y con una presión en función directa de las
características del cuerpo; de ahí que se puede pensar en
la serie de aplicaciones que se podrían dar a este
mecanismo, lógicamente con las debidas mejoras,
principalmente en la parte mecánica y en lo tocante a los
sensores. El objetivo fundamental de este estudio y
construcción es proporcionar al estudiante la oportunidad
de palpar en la realidad con la serie de conocimientos,
1.2

limitantes y experiencia que se necesita para hacer
realidad la teoría de control, ya que en la teoría se
pueden plantear "maravillas", que al quererlas construir
se tiene que realizar variaciones, adecuaciones ? etc. y
varias veces el prototipo construido , sino logra su
total objetivo al menos lo cumple parcialmente o en su
defecto da una visión para analizar otras experiencias un
tanto diferentes a las que se tenía pensado
originalmente. De ahí la importancia del desarrollo de
esta tesis que más es práctica que teórica, donde ha sido
necesario realizar labores no solamente de Ingeniería a
nivel de investigación, sino también manual al pretender
conseguir o construir varias piezas, adaptar circuitos,
etc.
Al final del desarrollo de esta tesis, se ve que se
ha realizado un estudio teórico—práctico, y se han
afianzado y puesta en práctica los conocimientos en
servomecanismos, sensores—transductores y demás diseños
electrónicos; a la vez que se ha construido en base a los
medios que disponemos en el mercado local.
De lo anterior, este prototipo puede ser utilizada
como Instrumenta de laboratorio en el Departamento de
Control.
En lo futuro, el diseño de este servomecanismo puede
servir para formar parte de un brazo controlado que con
1.3

ayuda de microprocesadores se puede tener un grado de
aplicaciones y control más amplio.
El prototipo construido consta de las siguientes
partes importantes:
/* a) .— Servomecanismo:
— sistema mecánica
— placas de ajuste
— servomotor
— sensores de fuerza y presión
— amplificador de patencia
— sistema de engranajes
b).— Módulo de Control:
— tarj'eta electrónica de control
(acondicionadores).
fuente de poder AC/DC
— switches, selectores de control
1.2 Contenido
Para el desarrollo de esta tesis se la ha dividido
en seis capitulas que se explican a continuación:
1.4
Capitulo I. Introducción
Aqui se proporciona una visión general y total
del tema a desarrollarse ? además de recaí car la
importancia que tiene el desarrollo de estas tesis
prácticas y proporciona una visión de las múltiples
aplicaciones que se pueden tener.
Capitulo II. Servomecanismos
Este Capitulo comienza con un estudia teórico
de servomecanismos y sistemas de control, para en
base a estos principias plantear el servosisterna que
se va a construir.
Luego se presenta una explicación muy clara del
servosistema que se construye, su base de funciona-
miento, componentes, forma de operación, etc.
Entonces con una base teórica de servomeca-
nismos y teniendo muy claro lo que se pretende
construir, se realiza finalmente un estudia teórica
sobre la función de transferencia y el análisis
literal de la misma, con la que se tiene una base
teórica del grado, orden del servosistema y
características de funcionamiento coma : error,
estabilidad, variaciones de ganancia, etc.
1.5

Consecuentemente en este Capítulo se realiza un
estudio desde la teoría de servomecanismos, el
servosistema a construirse, hasta terminar con el
análisis teórico de la función de transferencia.
Capítulo III. Sensores — Transductores
Básicamente este Capítulo parte desde el
concepto mismo de un sensor y transductor; luego da
una explicación de varios sensores tanto de fuerza
como presión mecánica que se pueden emplear en el
servomecanismo, hasta determinar el tipo de sensor
más apropiado que debemos construir para este
prototipo.
Pide más se mencionan o explican sistemas
sensoriales más avanzados a manera de información, a
fin de estar acorde con la tecnología moderna, ya
que en nuestro medio y con el limitante económico,
no se puede conseguir estos equipos de alta
precisión y menos aún para un tema de tesis
experimental corno es el presente.
Capítulo IV. Diseño y construcción del prototipo
Se podría decir que este Capítulo es netamente
práctico, donde se explica tanto el diseño como la
1.6

construcción del prototipo en el aspecto eléctrico,
electrónica, control y mecánica.
Desde un punto de vista práctico, este Capitulo
constituye la parte esencial de la presente tesis.
Se diseña y construye: el sensor3 transductor,
acondicionadores, sistema mecánico del servomeca-
nismo, sistema eléctrico, electrónico, y ensamblaje
total de todos los componentes.
Finalmente, una vez que se ha construido el
servomecanismo, se realizan mediciones de parámetros
con el propósito de obtener una función de transfe-
rencia real del sistema construido.
Capitulo V. Experimentación y resultados
El objetivo fundamental es someter al prototipo
a varias pruebas prácticas tanto por etapas como
totales.
ñl realizar pruebas por etapas se obtienen
datos, curvas que ayudan en el diseña de todo el
conjunto. Estas pruebas al igual que el desarrollo
del capitulo anterior se realizó en conjunto ya que
1.7
lo uno depende de lo otro y viceversa. Se realizan
pruebas con:
— fuente regulada
— tiempos de recorridos totales
— sensores
— ajuste (sostenimiento) de cuerpos
— amplificador de potencia
— servomotor
— servomecanismo
De todas estas pruebas se obtienen datos
importantes y necesarios para determinar la función
de transferencia del Servomecanismo "Control Análoga
de Presión Mecánica" indicado en el Capitulo IV.
Consecuentemente en este Capítulo se tiene
cuantificado el funcionamiento del prototipo.
Capitulo VI. Conclusiones
Este capítulo toma como base los anteriores,
principalmente el IV y V, estableciendo:
a) datos generales de funcionamiento del equipo:
su rango de operación, limitantes, precaucio-
nes, etc.
1.8
b) se -'.realiza un análisis real de la función de
transferencia del Capitulo IV.
c) conclusiones de los resultados obtenidos
Finalmente se Incluyen anexos que contienen:
esquemas, datas técnicos d_e Componentes, manual' de -
.o.peraclón del equipo etc.
1.9

CAPITULO II
SERVOMECANISMOS.
2.1 SERVOMECANISMOS
2.2 SISTEMAS DE CONTROL
2.3 SERVOSISTEMA A IMPLEMENTARSE
FUNCIÓN DE TRANSFERENCIA DEL
SISTEMA PROPUESTO
CAPITULO II
SERVOMECANISMOS
2.1 SERVOMECANISMOS
2.1.1 Qué es un SERVOSISTEMA y SERVOMECANISMO.
Cualquier con j" unto que realiza una determinada
FUNCIÓN DE CONTROL, con la finalidad de manejar una
PLANTA, se denomina SERVOSISTEMA; estos son sistemas de
control de red cerrada o de realimentación.
Con esto se puede lograr:
— control remoto o local
- manej'ar potencias grandes (PLANTA) con

dispositivos de control que requieren
cantidades despreciables de energía.
SERVOMECANISMO: es un sistema reallmentado donde su
salida es una variable mecánica de posición, velocidad o
aceleración, etc. Estos son empleados en sistemas
mecánicos de precisión.
Significado etimológico:
SERVOMECANISMO = SERVO + MOTOR
SERVO: del griego ESCLAVO (siervo)
Entonces, el SERVOMECANISMO es un esclavo que
proporciona la fuerza muscular (obtenida del motor) para
realizar un trabajo que su AMO le ordena (CONTROL).
2.1.2 CARACTERÍSTICAS.
Los SERVOMECANISMOS son sistemas de control de lazo
cerrado que tienen:
— entrada (valor referenclal)
— salida (valor medido)
- realimentación.
Estos son sensibles a la señal de error y tienden a
reducir ésta a un valor nulo (cero), acción que se
2.2

realiza automáticamente con el control realimentado del
sistema.
La REALIMENTACION es la información de las
condiciones que existen en la salida, que generalmente se
realimenta negativamente con la entrada; estableciéndose
la comparación del valor referencial (entrada) con el
valor medido (salida) dando como resultada una señal de
ERROR. El objetivo fundamental del control es reducir
este valor a cero.
Hay que notar que se consigue una corrección lenta,
sin excederse (sin sobretiros u oscilaciones fuertes)?
cuando esta señal de ERROR es pequeña; si el error es
mayor se puede reducir rápidamente hasta alcanzar un
valor pequeño, desde donde continuará la corrección en
forma lenta, aunque puede producirse un cidaje al rededor
del valor cero del error.
Consecuentemente se puede decir que generalmente los
problemas que a menudo se presentan en Servomecanismos
son :
— Exactitud
— Vibración -
El grado de EXACTITUD se presenta debido a que
siempre existe ERROR entre la entrada y la salida; en la
2.3
práctica no se puede lograr un valor de error Igual
cero
La VIBRACIÓN aparece ya que los dispositivos tienden
a sobrepasar el valor de error cero, oscilando durante un
tiempo hasta que finalmente se detienen; esto da como
consecuencia un mayor tiempo necesaria para lograr
estabilizar el sistema.
Tanto EXACTITUD como VIBRACIÓN deben tener valores
tolerables, dependiendo del tipo de aplicación que tenga
el Servomecanismo. De ahí que al diseñar un sistema se
dará una aproximación del grado de EXACTITUD y VIBRACIÓN
que se espera obtener para un determinado rango de
condiciones.
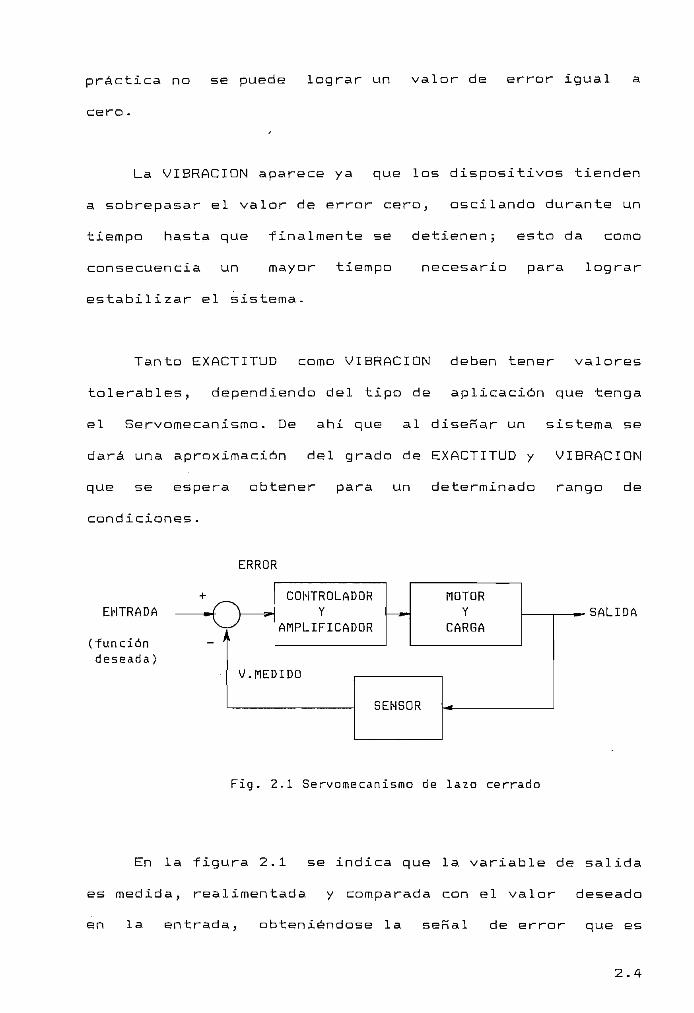
ERROR
ENTRADA
(funcióndeseada)
CONTROLADORY
AMPLIFICADOR
NOTORY
CARGA
V.NEDIDO
SALIDA
Fig. 2.1 Servomecanismo de lazo cerrado
En la figura 2.1 se Indica que la variable de salida
es medida, reallmentada y comparada con el valor deseado
en la entrada, obteniéndose la señal de error que es
2.4

amplificada y alimenta al motor. El objetivo principal es
reducir el error a un valor próximo a cero.
La razón fundamental para usar realimentación, a
pesar de su costo y mayor complejidad, es la reducción
del error del sistema en estado estacionario. El error en
estado estacionario es una medida de la EXACTITUD de un
sistema de control.
Los sistemas realimentados además son prácticamente
insensibles a variaciones de parámetros en la mayoría de
casos.
2.1.3 CLASIFICACIÓN
Dependiendo del tipo de respuesta, los Servomeca-
nismos pueden ser de tipo:
- SOBREAMORTIGUADO
- SUBAMORTIGUADO
- INESTABLE
De acuerda a la variable a ser controlada los más
comunes son:
- Sistema de CONTROL DE VELOCIDAD
- Sistema de CONTROL DE POSICIÓN
- Sistema de CONTROL DE TQRQUE
- Sistema de CONTROL HÍBRIDO.
2.5

2.1-4 COMPONENTES
2.1.4.1 POR BLOQUES
Se Indica en la figura 2.2 la formación de un
Servosistema.
EQUIPO DE CONTROL
SISTEMA DE
MEDICIÓNCOMPARADOR CONTROLADOR ACTUADOR
Fig . 2.2 Formación de un Servosistema
obteniéndose el diagrama de bloques funcional
que se indica en la figura 2.3
SISTEMA DE EVALUACIÓN.-
Sistema de Evaluación = COMPARADOR + CONTROLADOR
COMPARADOR.- El COMPARADOR produce una señal de ERROR
luego de comparar la señal medida
(variable controlada) con el valor
referencial o deseado.
2.6

CONTROLADOR.- El CONTROLADQR procesa la señal de error,
y permite al ACTUADQR realizar la
corrección sobre la variable controlada
(sal ida) .
SISTEMA DE EVALUACIÓN
¡COMPARADOR
J
PERTURBACIONES
VALORDESEADO
_
CONTROLADOR ACTUADOR PLANTASALIDA
errorELEMENTOS FINALES DE CONTROL
SISTEMA DE MEDICIÓN
(VARIABLECONTROLADA)
Fig. 2.3 Diagrama en bloques de un servosistema
SISTEMA DE EVALUACIÓN = COMPUTADOR
El SISTEMA DE EVALUACIÓN análogamente se puede
semejar con un computador, ya que al comparar la entrada
referencial y el valor medido de la salida, éste resuelve
ciertas ecuaciones (modos de operación de los
controladores) y calcula la salida aproximada.
2.7

SISTEMA DE MEDICIÓN.-
Es la medición de la variable de salida con ayuda de
un TRANSDUCTOR.
ELEMENTOS FINALES DE CONTROL--
Están formados por los elementos indicados en la
figura 2.4.
CONVERSORDE
SERÍALESACTUADOR
ELEMENTODE
CONTROL
PLANTA0
PROCESOSERIALDELCONTROLADOR
Fig. 2.4 Elementos Finales de Control
CONVERSOR DE SEÍsALES.-
Acondiciona señales del CONTROLADOR a fin de que
pueda manejar el actuador.
Pueden convertir:
corriente baja > alta
corriente ——> vol taj'e
vol taj'e > corriente e te.
Como ej'emplo se pueden citar los AMPLIFICADORES.
2.8

ftCTUADOR.-
Convierte la señal acondicionada de control en una
acción física; como por ejemplo abrir o cerrar una
válvula.
Los ACTUADORES pueden ser :
- eléctricos: motares AC y DC
solenoides
- neumáticos
— hidráulicos
— mecánicos
ELEMENTGS DE CONTROL.-
SISTEHft 0E EVALUfiCIüK
ACTUABORELEHEHTODE CONTROL PROCESO
SftLIBA
VALORDESEADO
SISTEHfi DE «EDICIOH
SENSOR - TRáHSDÜCTOR
(VARIABLECOHTROLñBA)
Fig- 2.5 Ejemplo de servomecanismo por bloques.
Estos influyen directamente en la variable dinámica
del proceso; entre los que se tiene:
2.9

- mecánicos: toberas, rodil los, bandas etc.
— eléctricos: motores, calefactores etc.
En la figura 2.5 se muestra un ejemplo en diagrama
de bloques de control de un Servomecanismo.
2.1.4,2 ELEMENTOS CONSTITUTIVOS DE UN SERVOMECANISMO
Se tiene los siguientes elementos principales:
— Servomotores
- Amplificadores
— Controladores
— Transductores (sistema de medición)
— Amortiguadores
— Detectares de error.
SERVOMOTORES.-
Los SERVOMOTORES proporcionan la fuerza (potencia)
necesaria para accionar la PLANTA en función de la señal
de control; y obtener de esta manera la salida deseada o
controlada.
El Servomotor proporciona la potencia de salida en
un Servomecanismo, este músculo (motor) que mueve toda el
sistema debe tener la patencia suficiente para mover
cualquier carga asociada, la que puede ser pequeña o
2.10

grande, y debe tener características que la adapten para
responder apropiadamente a señales provenientes del
detector de error. El Servomotor puede ser cualquier tipo
de motor eléctrico, algo especial para usos específicos,
o algún actuador hidráulico.
Los servomotores pueden ser:
— Servomotores de inducción AC.
— Servomotores DC :
— control por armadura
— control por campo
SERVOMOTORES DE INDUCCIÓN DE CA.-
Es el motor de inducción de corriente alterna
bifásico tipo Jaula de ardilla, formado por estator y
rotor. El rotor tiene una relación pequeña entre su
diámetro y longitud a fin de obtener un mínimo momento de
inercia y a su vez una buena característica de
aceleración.
FASE DECONTROL(VARIABLE) €
FASEFIJA
Fig. 2.6 Servomotor AC
2.11

En la figura 2.6 se tiene un servomotor de dos
fases. Este tipo de motor está compuesto por dos
devanadas; el uno forma un campo fijo y el otro un campo
variable que es alimentado con una señal de error
(variable) a fin de proceder a realizar el control
necesario. Nótese que existe un desfase de 90 grados
entre las dos tensiones que alimentan al campo del
servomotor. La tensión de control es de amplitud y
polaridad variable.
Una fuente de alimentación de dos fases es la que
energiza los dos devanados del campo; cuando se tiene
solamente una fase de alimentación, se conecta el
devanada de fase fija a la fase única a través de un
capacitor que produce los 90 grados de desfase. El
amplificador al que se conecta el devanado de control es
alimentado directamente con la linea de fase.
La polaridad de la tensión de control determina el
sentido de giro del motar.
Se obtiene la función de transferencia del motor
suponiendo que éste es lineal; lo que no se cumple en la
práctica ya que Km y Tm no son constantes y varían con la
tensión de control.
Es decir se tiene como función de transferencia:
2.12
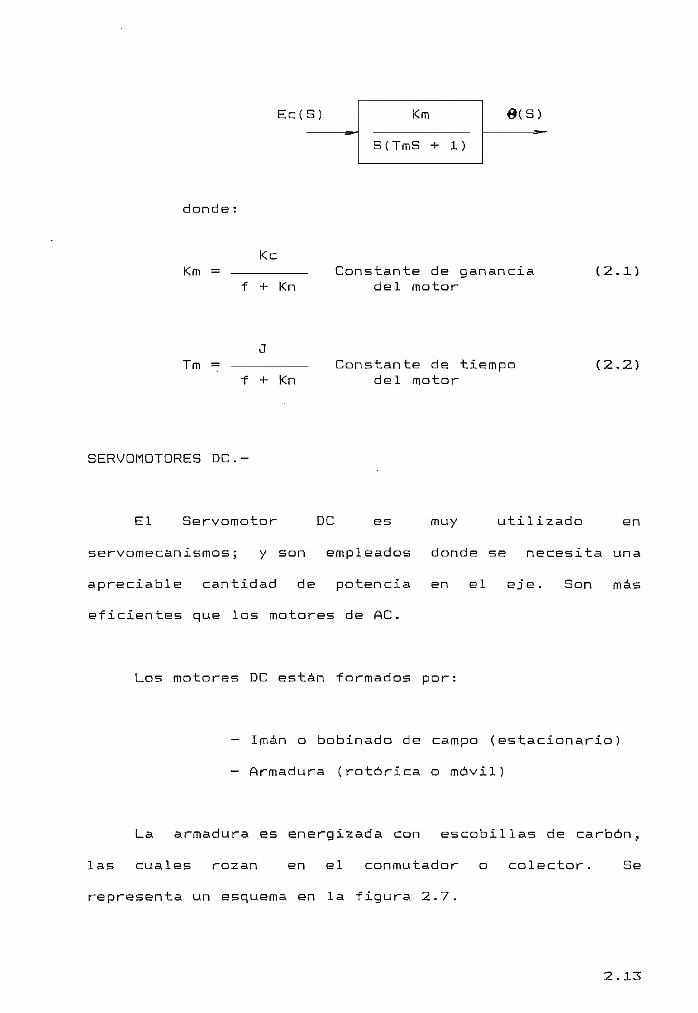
donde:
Km =
Ec(s;
Kc
f + Kn
Km
BCTmS + 1)
Constante de gananciadel motor
(2.1)
Trn = . • Constante de tiempof + Kn del motor
(2-2)
SERVOMOTORES DC . -
El Servomotor DC es muy utilizado en
servomecanismos; y son empleados donde se necesita una
apreciable cantidad de potencia en el eje. Son más
eficientes que los motares de AC .
Los motores DC están formados por:
— Imán o bobinado de campo (
— Armadura (rotórica o móvil)
La armadura es energizada con escobillas de carbón,
las cuales rozan en el conmutador o colector. Se
representa un esquema en la figura 2.7.
2.13

CONMUTADOR
CAMPO
Fig. 2.7 Servomotor DC
El motor girará dependiendo del voltaje aplicado al
campo y armadura; si se aplica el mismo voltaje al campo
y armadura, y luego se cambia de polaridad en los dos; no
cambia el sentida de giro del matar a no ser que se
cambie de polaridad solamente uno de ellos y el otro
permanezca en su polaridad original.
MOTOR DE EXCITACIÓN INDEPENDIENTE.-
Estos son más empleados en sistemas Servo ? aquí la
alimentación es independiente tanto para campo como para
armadura; consecuentemente tenemos:
a.- Motor DC controlado par armadura
b.- Motor DC contralado por campo.
2.14

a.- MOTOR DC CONTROLADO POR ARMADURA.-
Se tiene el esquema básico presentado en la figura 2.8
la
VOLTAJE iDE
ERROR VaDC
VARIABLE
i
f cern
cLh
if
(^ & vfV ) te
4-
r T
j> VOLTAJEDE EXCITA-CIÓN INDE-PENDIENTE
DCCONSTANTE
ARMADURA CAMPO
FIg. 2.8 Motor DC básico con controlpor armadura.
El campa ? generalmente es conectado a una fuente DC
constante, aunque en varios casos se emplea como campo
fijo un Imán permanente. El control va aplicado a los
terminales del Inducido o armadura. Como la polaridad del
campo no cambia; entonces el giro de la armadura
dependerá de la polaridad del voltaje que alimenta la
misma.
Operación.—
Cuando la armadura gira en un campo constante
se genera la fcem (que es proporcional a la
velocidad) en las escobillas, que se opone al
voltaje de armadura aplicada (V^); entonces tiende a
disminuir I«*.
2.15
Entonces con IT? V» la armadura gira a una
velocidad y genera una fcem menor a V^; permitiendo
el flujo suficiente para proporcionar el par a la
carga.
Cuando aumenta la carga, I» será suficiente
para manejarla; ya que la velocidad disminuye, la
fcem disminuye ? entonces aumenta I* y el motor puede
mover la carga disminuyendo su velocidad; siempre
que no exceda su capacidad.
En consecuencia manteniendo campo y armadura
constantes, la velocidad varia al variar la carga
mecánica; es decir la velocidad es baja con carga
pesada y alta con carga ligera.
Para manej'ar una carga pesada con la misma
velocidad que una ligera; se debe aumentar V*,,
entonces I* aumenta, acelera la máquina, la
velocidad aumenta, fcem aumenta e 1^ tiende a
disminuir.
Para una velocidad determinada el par aumenta
cuando W aumenta.
2.16

ANÁLISIS MATEMÁTICO.-
Para el análisis matemática se considera el diagrama
representativo del motor DC controlado por armadura que
se indica en la figura 2.9.
donde:
Ra La
la
Fig. 2.9 Ca) Motor DC controladopor armadura
R^ = resistencia de armadura CS1]
L* = inductancia de armadura CHenrios]
i* = corriente de armadura CA]
i-r = corriente de campo [A]
e* = tensión aplicada a la armadura [V]
eto = fcem [V]
O = desplazamiento angular del eje del motor
[radianes]
T = Par desarrollado por el motor (torque)
CIb.pié]
I-R = momento de inercia equivalente del motor y
carga (referido al eje del motor)
Cslug.pié2]
2.17
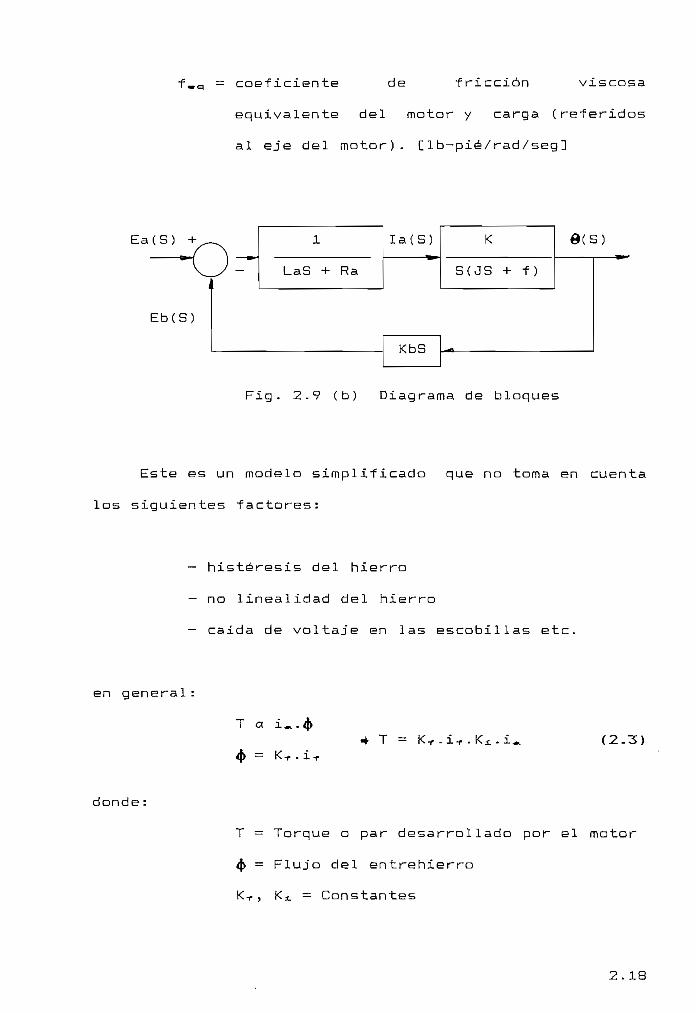
= coeficiente de fricción viscosa
equivalente del motor y carga (referidos
al eje del motor). C1b-pié/rad/seg]
Ea(S)
) ~~*"
1
LaS + Ra
Ia(S)
KbS
K
S(JS + f)
OÍS)
EbCS)
Fig. 2.9 C b) Diagrama de bloques
Este es un modelo simplificado que no toma en cuenta
los siguientes factores:
— histéresis del hierra
— na linealidad del hierro
- calda de voltaje en las escobillas etc.
en general:
T a i*
4» = K-r
4 T = (2.3)
donde
T = Tarque o par desarrollado por el motor
<j> = Flujo del entrehierro
K-r , Kj. = Constantes
2.18

como en este caso analizamos el motor DC controlado por
armadura, entonces:
iT = Constante y, <f> = Constante
T = K-r.ia (2.4)
(K-r : constante del par motor)
la fuerza contra electro motriz (fcem) : eto
(2.5)dt
Kb = constante de fcem
e*, (voltaje aplicado a la armadura) , es el que controla
la velocidad del motor DC controlado por armadura, la
misma que generalmente es suministrada por un
amplificador.
Del circuito equivalente tenemos:
eléctricamente:
La + R.i. + eb = e* (2.6)dt
mecánicamente
T = J . + f . . (2.7)dt3 dt
empleando la transformada de LftPLACE y asumiendo
2.19

condiciones Iniciales cera se tiene:
Eb(S) = Kb 8(S) S (2.B)
(LaS + Ra).Ia(S) + Eb(S) = Ea(S) (2.9)
T(S) = (05= + fS) 0(5) = K-rla(S) (2.1O)
De las ecuaciones 2.8, 2.9 y 2.10 se obtiene el
diagrama de bloques de la figura 2.9 (b), considerando
que :
entrada 4 Ea (S)
salida 4 0(5)
Se ve claramente en el diagrama de bloques que la
fcem tiene su efecto en la realimentación del motor;
consecuentemente aumenta el amortiguamiento efectivo del
sistema.
Se desea encontrar la función de transferencia:
(2.11)* -l- JS= + (L«f + R*J)S + R^f + K-rKto]
considerando L^ despreciable ( L^ —> O ):
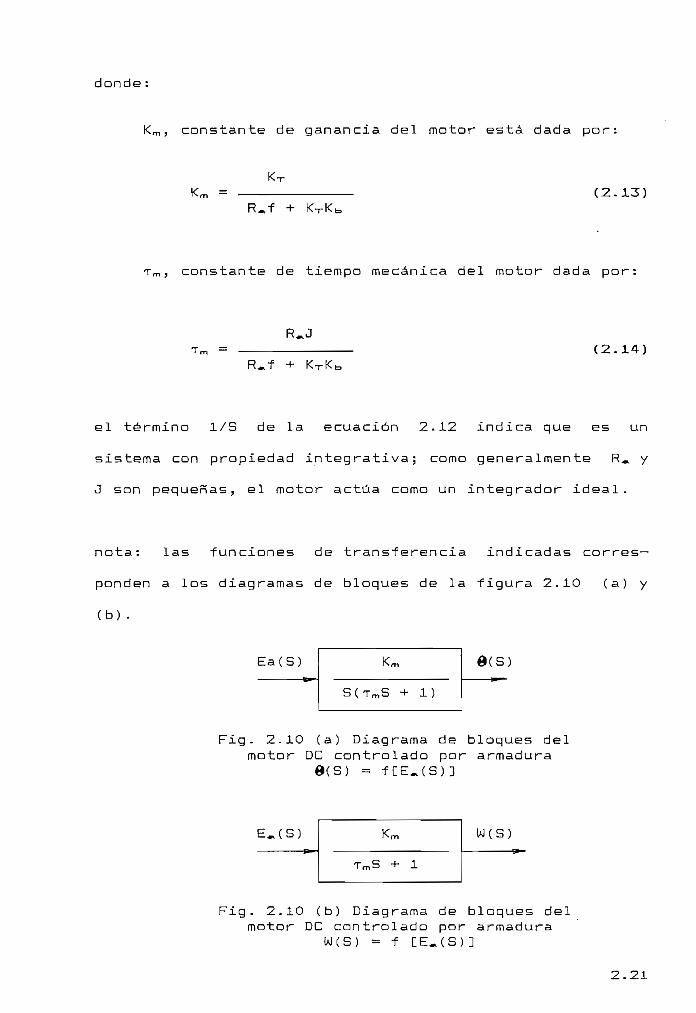
B(S) Km= (2.12)
E«(S) SfT^S + 1)
2.20
donde:
Km, constante de ganancia del motor está dada por:
(2-13)R.f
Tm¡, constante de tiempo mecánica del motor dada por:
T =m (2.14)
el término 1/S de la ecuación 2.12 indica que es un
sistema con propiedad integrativa; como generalmente R^. y
J son pequeñas, el motor actúa como un integrador ideal.
nota: las funciones de transferencia indicadas corres-
ponden a los diagramas de bloques de la figura 2.10 (a) y
(b) .
Ea(S)
S(TmS
Fig. 2.10 (a) Diagrama de bloques delmotar DC controlada por armadura
WCS)
Fig. 2.10 (b) Diagrama de bloques delmotor DC controlado por armadura
wcs) = f ce*(s):
2.21

Simpl.
Tomando un modelo simplificado del motor DC con campo de
imán permanente y considerando L* = O , e ignorando el
efecto resanante tenemos:
Eb = Kb.W [V, V/rad seg-*; rad seg"1] (2.15)
, A, (2-16)
T = Ja CNm; Kgm12; rad/seg3] (2.17)
nótese que estas ecuaciones son análogas a las anteriores
(ec. 2.8., 2.9, 2.10) con las correspondientes simplifi-
caciones; donde se obtiene el diagrama de bloques de la
figura 2.11.
Ea
Eb '
•J_
1
Ra
la
K-r
T 1
J
Kb
a 1
S
W 1
5
e
Fig. 2.11 Diagrama de bloques del motor DC
La función de transferencia de la Velocidad respecto
al voltaje de Armadura es:
2.22

W(S) 1/Kb l/Kto KmFT - - = - = - = - (2- IB)
E*(S) R*J 1 + Srm a. +- s-rm1 + S -
donde :
FUJTm = > constante de tiempo mecánica (2.19)
Kn-Kt, del motor
1Km = , constante de ganancia del motor (2-2O)
La función de transferencia de Posición con respecto
al voltaje de Armadura es:
8(5) l/Kb.l/S l/Kb Km
. = = = (2.21)E*(S) 1 + STm 5(1 + Srm) 5(1 + STm)
donde Tm x Km se han definido en las ecuaciones 2.19 y
2.20 respectivamente.
NOTA.— Hay que anotar que los dos grupos de ecuaciones
hasta aqui descritas son equivalentes con sus respectivas
simplificaciones -
Con este modelo se tiene la siguiente respuesta de
frecuencia:
S = jü> = j2itf
2.23

fb = (2.22)
siendo fb la frecuencia de ruptura, y:
CHz, V/rad s"1, Nm/A, Kg m=,
|Bm| [dB]
j
Fb
-6dB/década
(a)
- -f CHz]
Cb )
Fig. 2-12 Respuestas de frecuencia
4> = -tg™11- ( rm)
4> = -tg-3- (R.J/KtoK-r) (2.23)
[rad, Q, Kg m=, V/rad s"^, Nm/A]
2.24

* Calculando la frecuencia de corte o de ruptura (fb) se
puede comparar con la frecuencia de control a la que va a
operar el sistema. Hay que conseguir que:
f bS XSTEMA > fOPERACIÓN DEL- CONTROL-
ya que para valores mayores comienza a decrecer IGm
una pendiente de —ódb/década.
con
b.- MOTOR DC CONTROLADO POR CAMPO. -
Considerando igual modela simpl if icado que en el
control por armadura tenemos el esquema de la figura 2. 13
(a) y el diagrama en bloques en la figura 2.13 (b).
-A/SAA VA-
(a)
L-fS + S(JS + f)
(b)
Fig. 2.13 (a) esquema del motor DC controladopor campo, (b) diagrama de bloques.
2.25

rdonde:
RT = resistencia del devanado de campo [Q]
L-r = inductancia del devanado de campo [H]
í-r — corriente del devanada de campo £ A]
e-r = tensión de campo aplicado [V3
v ( tensión de control)>9^~~RS-
R^ = resistencia total de armadura más la
resistencia interior insertada. [Q3
i* = corriente de armadura [A]
g = desplazamiento angular del eje del motor Erad]
T = par o torque desarrollado por el motor [Ib.pié]
J-Q= momento de inercia equivalente del motor
y carga referida al eje del motor [slug —pié22]
f«c,= coeficiente de fricción viscosa
equivalente del motor y carga referido
al ej"e del motar [ 1 b . pie/rad/s]
entonces: i = 1^ 4 constante
el efecto de la fcem es reducida si la caída de tensión
es grande en R*.
En este tipo de control se obtiene un baj'o
rendimiento del motor, sin embargo, se puede usar para
control de velocidad.
se obtuvo anteriormente que en general la ecuación 2.3
2.26

T = K-r.I-f -K^.i.
pero, en el caso de control por campo, i* y Ka. son
constantes 7 entonces:
T = K= (2.24)
Del equivalente se tiene
ELÉCTRICAMENTE:
L •+• R-rdt
MECÁNICAMENTE:
T = Jdt
= K=a i.
(2.25)
(2.26)
empleando la transformada de LAPLACE, y suponiendo
condiciones iniciales cero se tiene:
(L-rS + R-,) I-r(S) = ET ( S ) (2,27)
3 + fS) 8(5) = KaIT(S) = T (2.28)
Como ET(S) es la entrada y 0(5) la salida:
2.27
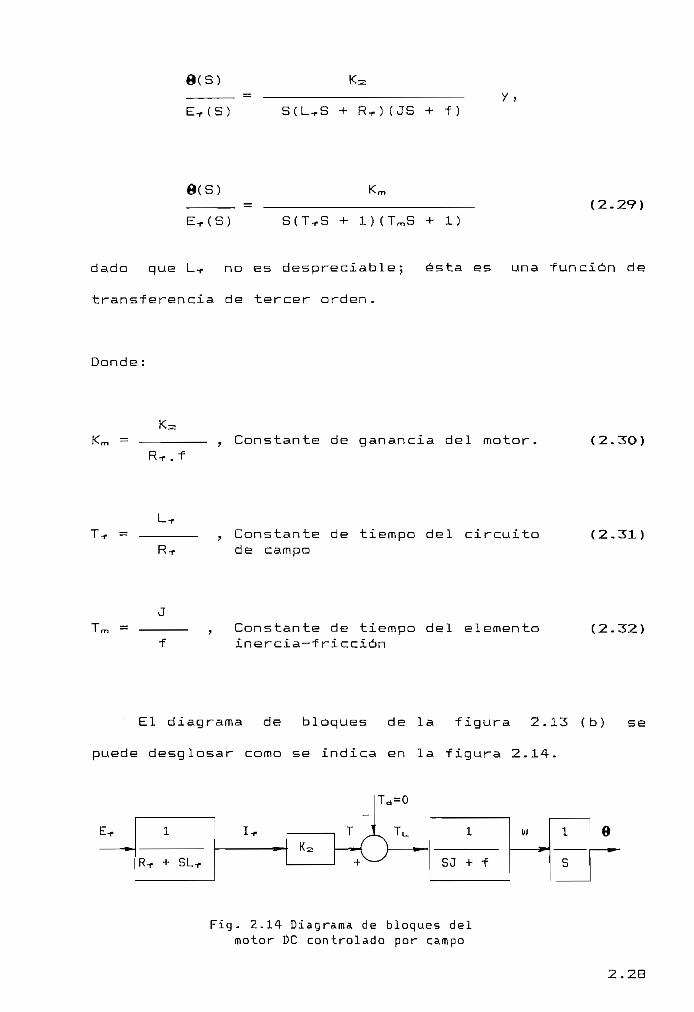
E-r (S) SCL-rS + R-r ) ( J5 + f )
ees)(2.29)
Er(S) S(T-rS + 1) (TmS 4-
dado que L-r no es despreciable; ésta es una función de
transferencia de tercer orden.
Donde:
R-r.f
7 Constante de ganancia del motor. (2.3Q)
? Constante de tiempo delde campo
(2.31)
Constante de tiempo del elementoinercia—fricción
(2.32)
El diagrama de bloques de la figura 2.13 (b) se
puede desglosar como se Indica en la figura 2.14.
E-r 1
R-r + SLT
I-r
K2
^
TL.
>^~
1
SJ + f
w 1
S
e
Fig. 2.14 Diagrama de bloques delmotor DC controlado por campo
2.28

donde:
T = Td 4- TV
T = torque del motor
Td = torque de perturbación
TL_ = torque de carga
COMPARACIÓN ENTRE CGNTRQL PDR CAMPO Y POR ARMADURA.-
— El control por campo requiere de poca potencia; de
ahí la ventaja de usar un Amplificador simplificado.
— En control por armadura la fcem actúa como un
amortiguador, lo que no sucede en control por
campo, donde se debe suministrar amortiguamiento
para el motor y la carga.
— Por el bajo rendimiento del control por campo, el
calor generado en el inducida puede ocasionar
problemas.
— La constante de tiempo en control por campo es mayor
que la constante de tiempo del control por
armadura. Entonces hay que tomar en cuenta la
constante de tiempo del amplificador de potencia
en el estudio del control.
2.29

Existen más desventajas del control por campo con
relación al control por armadura; razón por la
cual éste último es más empleada.
El control par armadura es ampliamente usado en
mecanismos de control por su rapidez y precisión
en la respuesta, su torque (par motor) es
proporcional a la corriente de armadura.
SEMEJANZAS Y DIFERENCIAS ENTRE SERVOMOTOR AC Y DC . ~
- Tanto constructivamente como en principio de
operación son diferentes.
— Las das tipos de motores son empleados en
Servomecanismos.
- El par es proporcional al voltaje si la velocidad se
mantiene constante, e invierte su sentido de
rotación cuando el voltaje variable invierte su
polaridad.
LA CARGA Y SU EFECTO EN LA DINÁMICA DE LOS SERVOMOTORES.-
En los Servosistemas? los servomotores funcionan
bajo condiciones continuamente variables ? ya que se
producen aceleraciones y desaceleraciones del rotor.
2.30
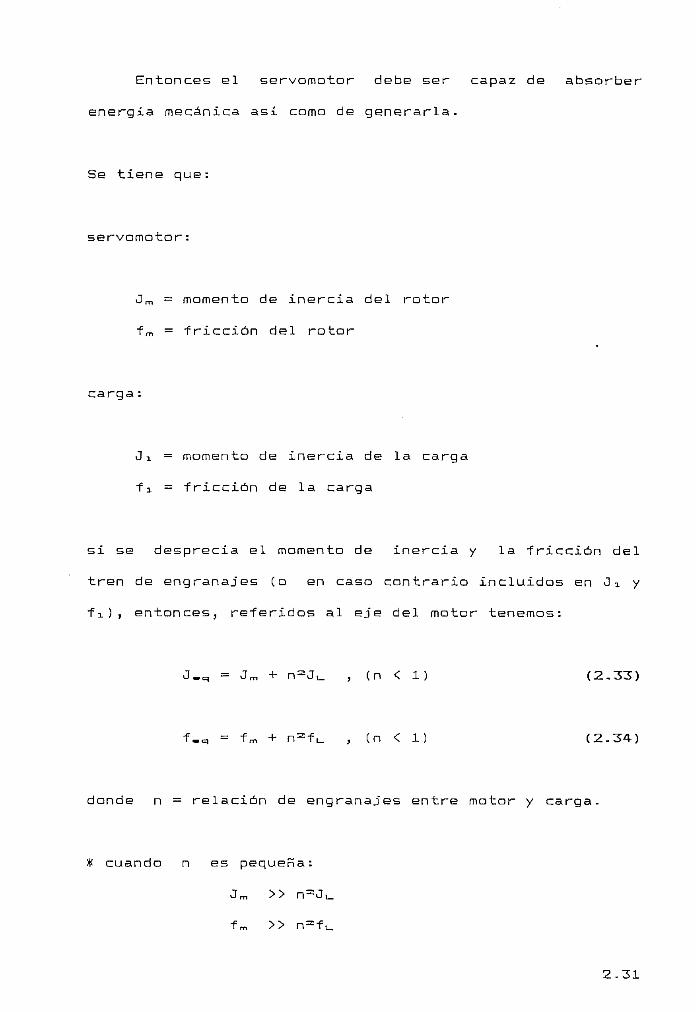
Entonces el servomotor debe ser capaz de absorber
en erg ¿a mecánica asi como de generarla.
Se tiene que:
servamotor :
Jm = momento de inercia del rotor
fm = fricción del rotor
carga :
J i = momento de Inercia de la carga
fi = fricción de la carga
si se desprecia el momento de Inercia y la fricción del
tren de engranaj es ( o en caso contrario Incluidos en J i y
f i ) , entonces, referidos al eje del motor tenemos:
J.c, = ¿m + n^Ju. , (n < 1) (2.33)
f.c, = f«, + n^fL. , (n < 1) (2-34)
donde n = relación de engranaj'es entre motor y carga.
* cuando n es pequeña:
2.31

se concluye que momento de inercia y fricción de la carga
referidos al eje del motor son despreciables.
Nota.— en esta tesis se cumple que n es pequeña ya que
la velocidad del rotor se reduce con el tren de
engranajes hacia la carga donde tenemos un movimiento
lento.
n = « l (relación de engranajes)nm
En el caso de que n no sea pequeña hay que
calcular Jwc, para evaluar la función de transferencia del
motor-carga.
AMPLIFICADORES.-
Se ha supuesto que la potencia que desarrolla el
detector de error es adecuada para operar el motor de
salida (servomotor) , lo que no siempre se cumple , excepto
en servos que requieren de una potencia muy pequeña.
Los Servoamplificadores (amplificadores) son los
encargadas de suministrar la potencia necesaria a los
servomotores en función de la señal de error. De ah¿ que
con señales débiles, como las de error, se puede manejar
potencias grandes, que en un campo industrial lo
constituyen los servomotores,, que son los encargados de
mover la planta.
2.32

En la práctica se usan uno o más pasos de
amplificación de voltaje seguidos de al menos un paso
final para suministrar potencia.
Cabe anotar que las señales resultantes de la
medición son diversas: salida de voltaje de un circuito
puente, señal de frecuencia de un contador, señal de
voltaje como función de un cambio de capacitancia7etc.
Generalmente estas son señales débiles y deben ampliarse
a fin de que puedan ser registradas o a su vez manejen
mayores potencias.
También se puede emplear amplificadores con la
finalidad de acoplar las impedancias entre Transductor y
circuito de salida; es decir transforma una señal que
proviene de un circuito de alta impedancia a otra señal
de baja impedancia ej. circuito seguidor de emisor.
Los Amplificadores se dividen en dos grupas
dependiendo de la naturaleza de su salida y de su
entrada:
- Amplificadores de voltaje
- Amplificadores de corriente
2.33

AMPLIFICADORES DE VOLTAJE.-
Su función de transferencia es
Vou-r(S) A« (2.35)
V i N ( S ) ST« + 1
generalmente T* ~ O
= A (2.36)
es decir, idealmente, su ganancia es constante para todas
las frecuencias, pero ya prácticamente tienen una banda
de trabajo limitada.
AMPLIFICADOR DE CORRIENTE.-
La corriente de salida es proporcional al voltaje de
entrada:
I OLJT ( S ) AI
= : (2.37)
donde:
= ganancia [ A / V 3
2.34
En la práctica podemos construir:
1.— Amplificadores lineales a
2.- Amplificadores SCR
3.- Amplificadores switching etc.
Estos servoamplificadores pueden suministrar
voltajes, y/o corrientes positivos o negativos.
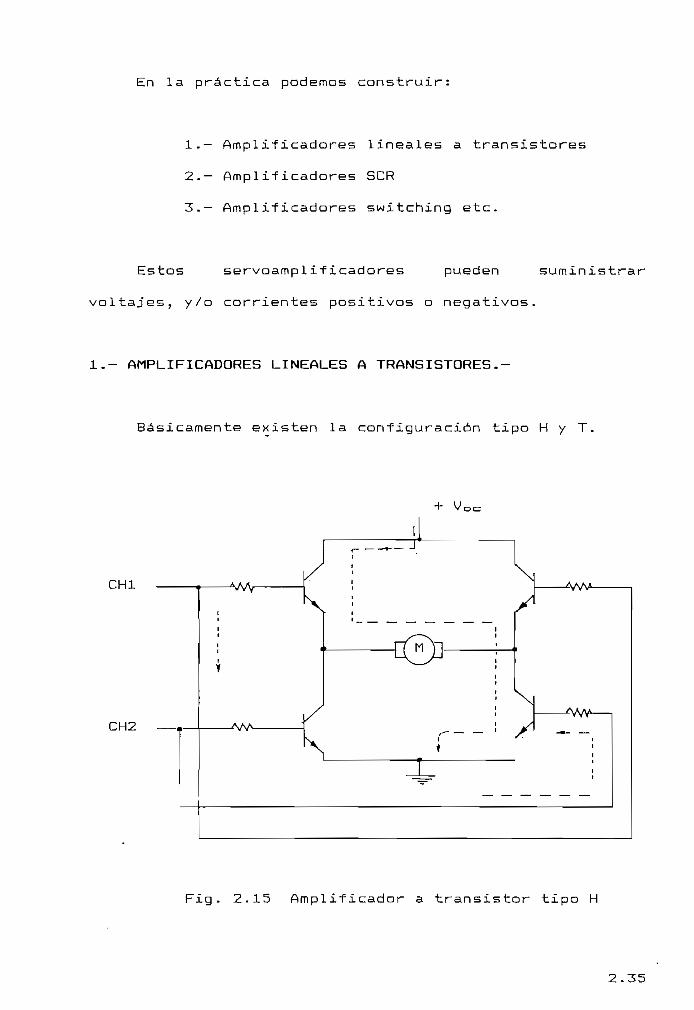
1.- AMPLIFICADORES LINEALES A TRANSISTORES.-
Básicamente existen la configuración tipo H y T.
CH1
CH2
Fig. 2.15 Amplificador a tipo H
2.35
te*
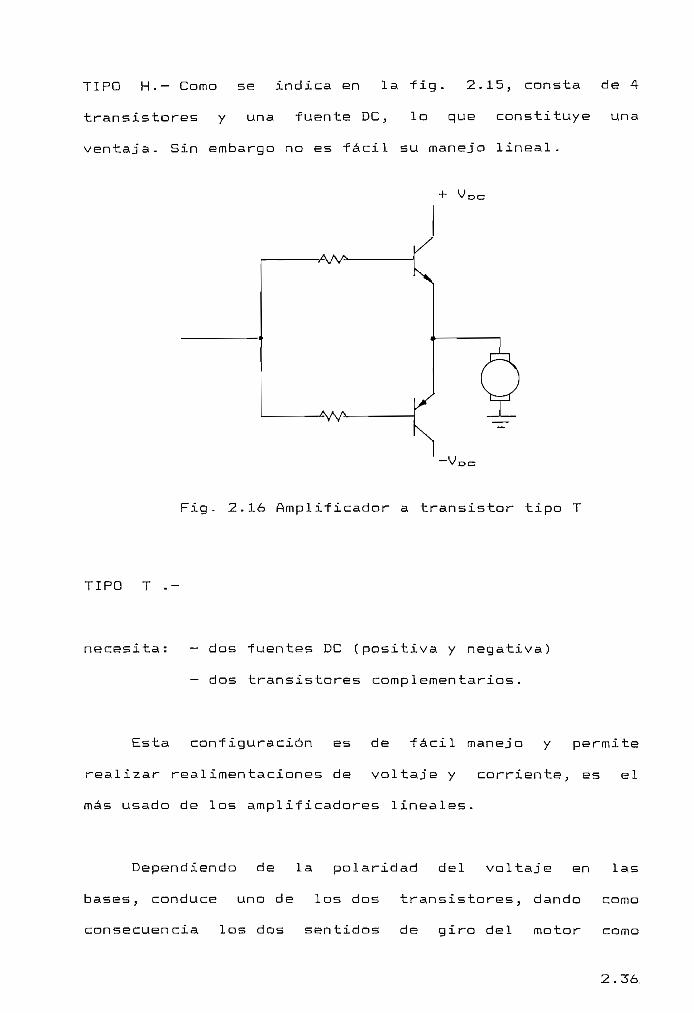
TIPO H-- Como se Indica en la fIg. 2.15, consta de 4
transistores y una fuente DC? lo que constituye una
ventaja. Sin embargo no es fácil su manejo lineal.
+ Voo
Fig. 2.16 Amplificador a transistor tipo T
TIPO T .-
necesita: - dos fuentes DC (positiva y negativa)
— dos transistores complementarlas.
Esta configuración es de fácil man e j" o y permite
realizar realImentaclones de voltaj'e y corriente, es el
más usado de los amplificadores lineales.
Dependiendo de la polaridad del val taj'e en las
bases, conduce uno de los dos transistores, dando como
consecuencia los dos sentidos de giro del motor como
2.36

función de la polaridad del voltaje de entrada en las
bases. El nivel de voltaje en el motor (voltaje de
salida) varia linealmente con la señal que se tiene en la
base (voltaje de entrada).
Precauciones.-
# Los dos transistores complementarios no deben conducir
simuítansámente, ya que se puede tener un corto circuito
entre la fuente positiva y negativa. Punto éste que debe
tomarse muy en cuenta ya que puede dañar los
transistores.
K La disipación de potencia de la etapa de salida es el
producto del voltaje y la corriente a través del
transistor, la que se manifiesta como calor que debe ser
disipado.
# Además hay que usar limitadores de picos de corriente,
asi como de su duración o condiciones de sobrecarga, a
fin de no dañar los transistores o quemar los fusibles
(generalmente cuando las cargas son grandes se producen
picos altos y durables).
2.- AMPLIFICADORES SCR.
Actualmente se emplean en fuentes de potencia
trifásicas que alimentan servomotores de grandes
2.37

potencias para el manejo de máquinas herramientas en el
campo Industrial.
3.- AMPLIFICADORES "SWITCHING"
Son los servoarnpl If i cada res más versátiles empleados
en la actualidad. Un ejemplo típico de este tipo es el
amplificador PWM (modulación por ancho de pulso).
TACOMETRO
Idealmente es un aparata en el que su voltaje de
salida v"g es proporcional a la velocidad angular.
VQ(S) = K,.W(S) (2.38)
Son empleados en servomecanismos para realimen-
taciónes7 es decir, como una especie de transductor de la
velocidad de salida.
POTENCIÓMETRO
Un potenciómetro lineal proporciona una salida v"p
proporcional a la posición angular & (que también puede
ser un desplazamiento lineal en el caso de potenciómetros
rectos). Nótese que también existen potenciómetros
logarítmicos ? ete.
2.38

Vs
v(
(a) Potenciómetro de posición lineal
(b) Potenciómetro de posición angular
FIg. 2.17 Potenciómetros (a) lineal, (b) angular
para el caso del potenciómetro lineal
Vp = Kp x
para el potenciómetro angular;
= K,
como : W(S)
2.39

la función de transferencia es
W(S)
La relación anterior puede expresarse en diagrama de
bloques:
w 1
s
aKR
En la práctica, la relación no es uniforme (afecta a
la linealidad) debido a que su resistencia no es
uniforme, ya sea por la corrosión del alambre o circuitos
de carga; problemas éstos que se deberá tratar de
compensar en casos,
2.1.5 ERROR Y VIBRACIÓN (OSCILACIÓN)
En servomecanismos ? la realimentación de salida
tiene la finalidad de reducir el error; dado que para que
el motor se mueva necesita un error diferente de cero, no
conviene que el error sea igual a cero. La caracterís-
tica fundamental que debe existir en cualquier
dispositivo de control es el error entre la salida y la
2.40

entrada, error que debe ser reducido al mínimo
(teóricamente error = O).
Error transitorio.—
Es el error con el que se inicia el movimiento y
cambia cuando la señal de salida se va ajustando a la
señal de entrada.
entrada
error
salida
errorestado
transitorio
errorestadaestable
Fig. 2.18 Señal de error para entrada escalón
2.41
Error en estado estable
Cuando la señal de salida tiende a alcanzar a la
entrada, el error se hace constante o estable como se
indica en la figura 2.18.
Teóricamente 7 cuando el error es cero se paraliza la
salida; en la práctica, la salida se detiene antes de que
el error sea cero ya que su reducción hace que el par
residual no sea suficiente para vencer la fricción total.
También puede darse el caso que la inercia de salida
contrarreste la fricción y lieve el movimiento hasta
sobrepasar el cero, generando así un error en sentido
apuesto que hace que el motor tenga un par en sentido
inverso que trata de detener este movimiento y regresarlo
a la posición cero del error.
Consecuentemente se produce una OSCILACIÓN o
VIBRACIÓN al tener excesos alrededor del cero en ambos
sentidos, hasta que la salida se detiene precisamente en
error cero o en alguna posición próxima.
Las causas fundamentales por las cuales existe
vibración son:
- Inercia del cuerpo en movimiento.
— Otra fuerza que trata de llevarlo al reposo.
2.42

Los servosistemas se caracterizan por estos
elementos, siendo por ello sistemas vibratorias por
naturaleza.
INERCIA
Para reiniciar un movimiento se requiere de un
esfuerzo, asi como también para detenerla. Consecuente—
mente cuando el MOTOR desarrolla un par, la salida no
iniciará su movimiento hasta que la energía sea
suficiente para vencer la INERCIA y fricción del sistema.
A continuación se indican ejemplos para obtener la
señal de error, la misma que representa la diferencia
entre los valores medido y referencial.
Detector de error basados en el puente de idheatetone
BSALIDA
ALMOTOR
Fig. 2.19 Circuito detector de error
En la fig- 2.19 se tienen dos resistencias, A y B?
no necesariamente iguales, en paralelo con una fuente DC,
2.43

Las resistencias tienen contactas deslizantes que
constituyen los terminales de salida (que alimentan al
servomotor).
El punto negativo de cada resistencia se considera
como referencia cero. Mientras más arriba se muevan los
contactos deslizantes tendrán una tensión más positiva
con respecto al punto común (hasta llegar al de la
fuente).
Por ejemplo, si los contactos se desplazan a la
tercera parte del recorrida total3 tendrán el mismo valor
de tensión; aunque las resistencias no tengan el mismo
valor. El voltaje en los terminales de salida dependerá
de las posiciones relativas de estos terminales. La
condición de equilibrio o nula se tiene cuando ambas se
encuentren en iguales posiciones proporcionales. En caso
contrario existirá una diferencia de potencial en la
salida que puede ser positiva o negativa.
La tensión de salida es proporcional a la diferencia
de posición entre los das contactos deslizantes cuando no
se tiene conectado carga en los terminales, ya que cuando
se conecte algún dispositivo hay que tener precauciones
para mantener la proporcionalidad.
Si la entrada y salida coinciden en posición
(error cero), el circuito de potenciómetros está en
2.44
equilibrio, entonces no existe tensión que energize el
motor.
Si la perilla de mando se mueve en cualquier
dirección que se desee, desaparece el equilibrio y se
aplica al motor una tensión proporcional al error y can
polaridad correspondiente a esa dirección.
Dependiendo de esta polaridad, el motor gira en el
sentida que permita 1 levar al potenciómetro de salida en
la misma dirección que se desplaza el de entrada, esto
con la finalidad de restablecer el equilibrio y detener
el movimiento de salida. Por lo tanto se tiene un
control proporcional.
Puente de Wheatstone con C.A.
Al igual que el caso anterior en que se alimenta con
D.C., se puede emplear A.C., existiendo la misma
condición de nulidad o de voltaje de error. En este caso
no se tiene cambio de polaridad, sino cambio de fase, la
misma que ocasionará un cambio en el sentido de giro del
motor de C.A.
2.45
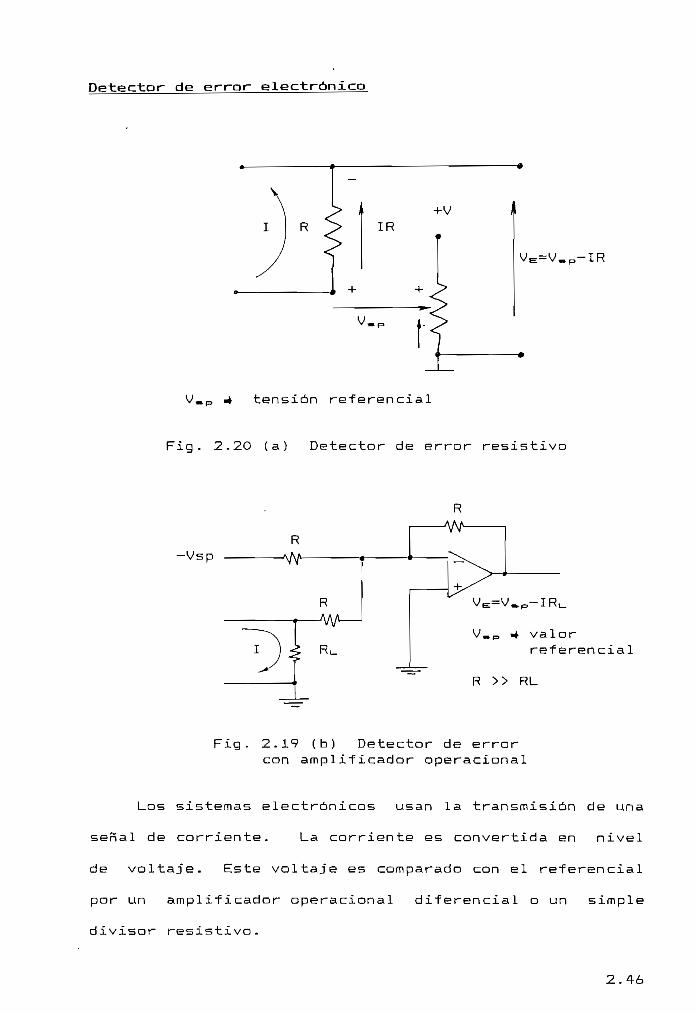
Detector de error electrónico
IR
.p, 4 tensión referencíal
FIg. 2.20 (a) Detector de error
-Vsp
Vmp> 4 valorreferencial
R » RL
Fig. 2.19 (b) Detector de errorcon amplificador operaclonal
Los sistemas electrónicos usan la transmisión de una
señal de corriente. La corriente es convertida en nivel
de voltaje. Este voltaje es comparado con el referenclal
por un amplificador operaclonal diferencial o un simple
divisor
2.46

Fallas en detectores de error
Los detectores de error al igual que otros aparatas
carecen de perfección, lo cual a su vez ocasiona errores
en el funcionamiento de servos. Estos errores pueden
compensarse o considerarse en el diseño total del
sistema. Se considera error "cero" cuando las señales de
mando y de salida tienen el mismo valor. Prácticamente
es imposible producir un par de dispositivos con entrada
y salida que sean exactamente iguales para conseguir un
efecto de nulidad perfecto., como por ejemplo:
— Dos potenciómetros no se pueden fabricar idénticos
j¿ cuando los extremos deslizantes van de uno a otro
extremo. Esto ocasiona una desviación de
"1inealidad"? la que expresada en porcentaje es un
criterio de calidad muy importante en los
potenciómetros.
— Los detectores de error que dependen de la acción
transformadora sufren distorsiones en las
trayectorias de flujo a través de sus núcleos.
Entonces nunca existe "cero" absoluto en el voltaje
de error.
Por lo tanto, la construcción de servos de alta
exactitud depende de:
2.47

1. Minlmización de estos defectos en los fabricantes de
componentes.
2. Reconocer los defectos remanentes por los
diseñadores de sistemas y superarlos mediante
compensación -
2.1.6 AMORTIGUAMIENTO
Se denomina amortiguamiento a la reducción de la
oscilación o vibración ya sea mediante la fricción o por
otros medios equivalentes.
GRADOS DE AMORTIGUAMIENTO
El tiempo de disipación de las vibraciones depende
de la magnitud de la fricción (F).
F = magnitud de la fricción viscosa; la rapidez de
amortiguamiento está relacionada directamente
con F .
Fe = cantidad de fricción suficiente para prevenir
la vibración
Cuando: F > Fe ^ sobreamortiguamlento
F < Fe 4 subamortiguamlento
2.48

Dispositivos de amortiguamiento
La extensión y duración de la vibración indeseable
se ve eliminada por la presencia de la fricción. La
introducción de fricción o fuerzas que actúan como tal
reducen o eliminan la vibración-
Fricción viscosa
Son fuerzas de fricción proporcionales a la
velocidad instantánea del miembro de salida. La
introducción de estas fuerzas se denomina
"amortiguamiento".
Cualquier fricción contribuye al amortiguamiento
pero una cantidad excesiva hace que el sistema se vuelva
lento y origine un error mayor en estado estable.
Un sistema bien diseñado tiene una fricción casual o
sin control tan pequeña como sea posible y la fricción
necesaria para el amortiguamiento por medios
controlables.
Ejemplos:
a) Amortiguamiento de aire
El más simple es un ventilador sobre algún eje del
mecanismo de salida. Al girar el aire produce un par de
2.49

retarda que se incrementa con la velocidad. La magnitud
de la resistencia del ventilador puede ajustarse
cambiando la forma o posición de las aspas.
b) Amortiguamiento de líquidos
Es un volante sumergido total o parcialmente en un
recipiente que contiene algún liquido, como por ejemplo
aceite. El disco o volante puede ser liso o con estrías,
paletas, etc. El par varía cambiando la profundidad de
inmersión, o con líquidos de diferente viscosidad. Los
amortiguadores líquidos son más efectivos que los
ventiladores para velocidades bajas.
c) Amortiguadores Electrodinámicos
eje de salida disco
AC
electroimán
Fig. 2.21 Amortiguador de discoen un campo magnético
2. 50

Con relación a la figura 2.21, cuando gira el disco
metálico, el imán crea corrientes parásitas en el disco,
lo que produce un campo magnético que reacciona con el
Imán dando lugar a una fuerza de retardo sobre el disco.
El par de retardo es proporcional a la velocidad del
disco mientras el campo magnético en el que gira sea
constante, ya que si éste aumenta, el par por unidad de
velocidad del disco aumentará y viceversa. Un tornillo
de ajuste del disco sirve para acercarla o alejarlo del
imán, lo que permite un fácil ajuste. Igual efecto se
consigue modificando la fuerza del electroimán- Este
amortiguador tiene una buena precisión.
d) Efecto viscoso de la realimentación de velocidad
La reallmentaclón de velocidad proporciona
amortiguamiento. Para ello se coloca un pequeño
generador eléctrico sobre el eje del servomotor. El
generador debe entregar un voltaje proporcional a la
velocidad de su eje, por eso se denomina "Generador
Tacométrico".
En este tipo de reallmentaclón de velocidad, el
voltaje de salida del generador se conecta a la entrada
del amplificador del servomecanismo junto con el voltaje
de error del detector de error como Indican las figuras
2.22 y 2.23, y actúa de la siguiente forma:
2.51

Cuando existe error entre la entrada y salida, y el
mecanismo de salida está en movimiento , entonces el
voltaje que 1lega al amplificador es menor que el
correspondiente a un error similar sin movimiento en la
salida o con movimiento lento.
La salida del amplificador (voltaje que alimenta al
servomotor) es proporcional a su entrada, entonces el par
del motor disminuye una cantidad proporcional a la
velocidad de salida. ft la entrada del amplificador se
conectan en serie y con las polaridades opuestas, tanto
los voltajes de error como del generador.
En este tipo de realImentación es fácil variar la
cantidad del efecto. Por ejemplo, colocando un
potenciómetro en los terminales del generador y ajustando
el contacto deslizante, a la vez que se puede utilizar la
fracción de voltaje generado que se desee. El generador
debe producir un voltaje igual o mayor al máximo que se
necesita para realizar el efecto requerido.
Observaciones
— Se requiere que el motor proporcione el par que el
freno absorbe, lo que constituye un desperdicio de
energía que dependiendo del caso, puede o no ser
Importante.
2.52

- La real imentación de velocidad es el tipo más
versátil de amortiguamiento viscoso ya que actúa
sobre el par que produce el motor sin desperdicio de
energía. En sistemas de alta inercia y baja
fricción, la realimentación de velocidad origina un
par de retardo, además de actuar como freno cuando
sea necesario.
alimentación
entrada detectorde error
realImentaclonde velocidad
Fig . 2.21 ReaIImentaclon de Velocidad
FRICCIÓN DE COULOMB - ZONA MUERTA
La fricción de Coulomb siempre está presente de
alguna manera aunque su valor o cantidad es difícil de
predecir. Esta fricción no depende de la velocidad y
permanece Igual entre el Inicia y el final de la etapa
2. 53

transitoria. Este valor se conoce cuando se termina la
construcción del sistema.
errorSALIDA
error CQNTRGLADQR
entrada
AMORTIGUAMIENTOVISCOSO
AMPLIFICADOR
(b)realimentación
salida
FIg . 2.23 Diagrama de bloques con amortiguamiento
Un buen servomecanismo tiene una fricción de Coulomb
que es despreciable en comparación con la fricción
viscosa.
Cuando el errar es pequeño, el par producido no será
suficiente para vencer la fricción de Coulomb, por lo
tanto el movimiento a la salida no se Iniciará (a menos
que se encuentre en movimiento). Esto origina la
existencia de una "zona muerta" a cada lado de la
2. 54
posición de error cero, consecuentemente la salida puede
detenerse no sólo en error cero sino en cualquier posi-
ción dentro de la zona muerta.
Consecuentemente el par de salida aumentará, pero el
eje de salida no girará hasta que el par tenga un valor
suficiente para vencer la fricción de Coulomb, es decir,
no habr.á movimiento alguna hasta que el error exceda los
limites de la zona muerta.
Al final, la salida se detendrá aunque el error no
se haya reducido por completo a cero.
Existe un grada de incertidumbre en el punto de
detención, de ahí que la precisión del servo está sujeta
a TOLERANCIAS.
En servos subamortiguados, la salida vibrará
al rededor de la zona muerta debido a su inercia hasta que
desaparezca el par disponible y entonces la salida se
detendrá.
Luego, la zona muerta es un problema y a la vez es
útil. Problema, ya que introduce incertidumbre en el
punto de detención, y es útil ya que lleva la respuesta
transitoria a un final definitivo. La fricción de Coulomb
obliga a determinar el transitorio en un tiempo
2.55
razonable. Pero la constante de tiempo es criterio para
determinar la duración del transitorio.
La zona muerta puede reducirse haciendo más
pequeño el valor de la fricción de Coulomb, pero otra
forma de reducir esta zona es aumentando el par para una
cierta cantidad de error, es decir aumentando el factor
de par K se reduce el ancho de la zona muerta. K se
determina parcialmente por la ganancia del amplificador:
£ = F/2 -T KJ (2.39)
donde:
F : fricción viscosa
O : momento de inercia
K : ganancia de F-T.
£ : coeficiente de amortiguamiento
SI K aumenta, entonces £ se reduce, suponiendo F y J
constantes. Pero si £ se reduce, entonces origina ines-
tabilidad, es decir vibra más veces con mayor extensión.
Por tanto, al aumentar la ganancia para corregir la
Inexactitud debida a la zona muerta, se puede llegar a
una Inestabilidad Indeseable.
2.56
£ se hace mayor reduciendo J o aumentando F? pero
reducir J es Impracticable ya que el momento de Inercia
es inherente al mecanismo.
En cambio en un servomecanismo se puede aj'ustar la
cantidad de amortiguamiento viscosa F; entonces,
ajustando K y F se pueden variar los requerimientos de
exactitud y estabilidad. De ahí que en un diseño se debe
considerar un amplio Intervalo de estas cantidades para
poder hacer variaciones y ajustes.
2.1.7 SISTEnA DE MEDICIÓN
Los sensores que miden la variable de salida son los
que proporcionan la señal de realImentaclon a ser
comparada con el valor referencía17 y consecuentemente
originan la señal de error. De ah¿ que el elemento de
medición tiene un papel muy Importante en el
comportamiento total del sistema de control.
Hay que tomar en cuenta que:
- El elemento de medida no debe influir en la
respuesta del sistema
- Su respuesta debe ser lo más rápida posible para
lograr un control más rápido.
- Deben ser lineales en lo pasible.
2.57

RCS) o ECS) Elementode
Control
M(S)
B(S)
TS + 1
CCS)
Elementa de medición de ler. orden
R(S) ro ECS)
- I
Elementode
Control
M(S)
B(S)
(TxS+1) (TaS+1)
CCS)
RCS)
Elemento de medición de 2da. ordensabreamortiguado.
E(S)
B(S)
Elementode
Control
M(S)
CCS)
i>C>o
Elemento de medición de 2do. ordensubamortiguado
Fig. 2.24 Funciones de transferenciade sistemas de medición
2. 58

La función de transferencia del lazo de
real imentación está determinada por el elemento de
medición. Si la constante de tiempo de medición es
despreciable frente a las constantes de tiempo del
sistema de control, entonces la función de transferencia
es una constante.
En la figura 2.24 se muestran varios tipos de
funciones de transferencia de sistemas de medición.
2-2 SISTEMAS DE CONTROL (CONTROLADORES)
Los controladores san la parte más importante en el
control de servomecanismos. Las funciones del contrca-
lador son :
a) EVALUACIÓN del valor del ERRDR que es función
de la comparación entre el valor referencial y
el valor medido.
b) Iniciación de la ACCIÓN de CONTROL basada en la
evaluación ? según se indica en la fig. 2.25
E=Vr-VmCONTROLADOR
SALIDA ALELEMENTO FINALDE CONTROL
Fig. 2.25 Acción de control
2. 59
E = Vr - Vm
donde :
E : Error
Vr : Valor referencial
Vm : Valar medido
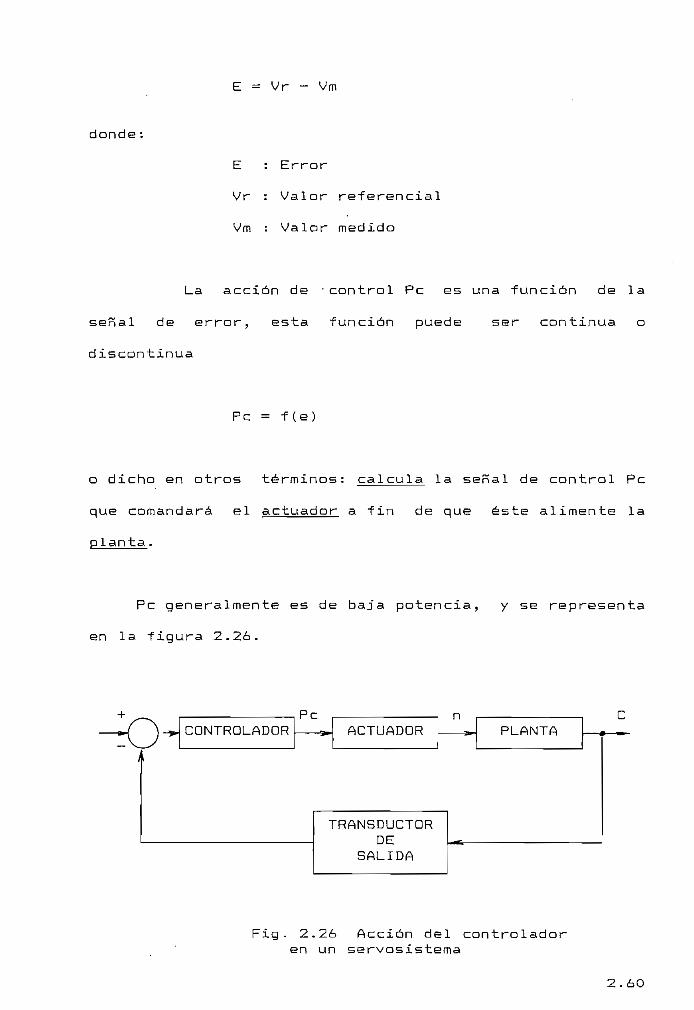
La acción de • control Pe es una función de la
señal de error, esta función puede ser continua o
discontinua
Pe = f (e)
o dicho en otros términos: cal cula la señal de control Pe
que comandará el actuador a fin de que éste alimente la
planta .
Pe generalmente es de baja potencia, y se representa
en la figura 2 . 26 .
CONTRGLADORPe
ACTUADOR
TRANSDUCTORDE
SALIDA
PLANTA
$&
Fig- 2.26 Acción del controladoren un servosistema
2.60
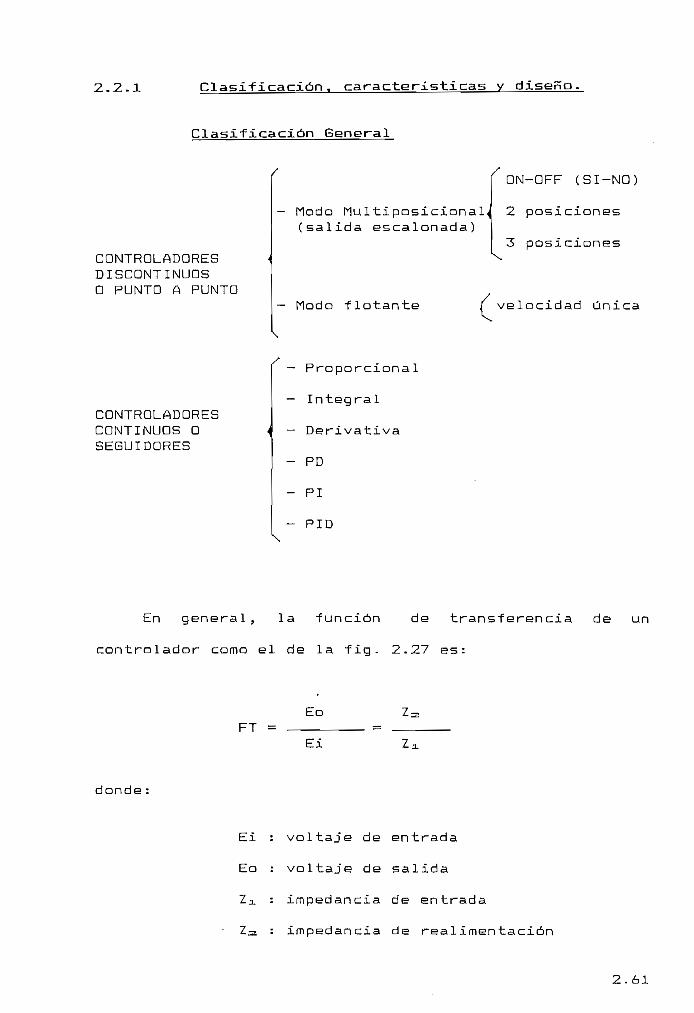
2.2.1 Clasificación, características y diseño.
Clasificación General
CONTROLADORESDISCONTINUOSO PUNTO A PUNTO
CONTROLADORESCONTINUOS OSEGUIDORES
- Modo Multiposicional<(salida escalonada)
- Modo flotante
ON-OFF (SI-NO)
2 posiciones
3 posiciones\d única
— Proporcional
En general, la función de transferencia de un
controlador como el de la fig- 2.27 es:
donde
EoFT =
Ei
Ei : voltaje de entrada
Eo : voltaje de salida
Zo. : irnpedancia de entrada
~L^z : impedari cía de realimentación
2.61

Eo
Fig . "2.2.7 Ejemplo de Controlador
Zl y 12 pueden ser resistencias, condensadores o
combinaciones de el los, dependiendo de estas combina-
ciones tenemos controladores P, I , D, PD, PI , PID. En el
Anexo 2.1 se pueden apreciar estos controladores y sus
generales.
Controladores Discontinuos ú Punto a Punto
Producen cambias DISCONTINUOS en la salida
dependiendo del error de la variable controlada . La
posición de mando o referencia se cambia en forma
repentina (brusca) a una nueva posición, consecuentemente
el servomotor debe producir un par grande a fin de mover
la salida rápidamente a la nueva posición de entrada. Es
decir, el sistema hace los movimientos necesarios sin
tomar en cuenta las posiciones intermedias, hasta llegar
a la nueva posición.
2.62

Consecuentemente., el fenómeno completo es un
transitorio y no un movimiento de estada estable.
Hay aplicaciones donde se emplea un control de doble
velocidad, de manera que se reducen los cambios bruscas y
la tendencia de oscilación; ya que en primera instancia
tenemos alta velocidad y mayor velocidad de
desplazamiento para luego reducir la velocidad y con una
menor velocidad de desplazamiento llegar al punto deseada
de control sin que se produzcan oscilaciones grandes.
Controladores continuos
El elemento control ador está siempre fiel o en
sincronismo con la señal de mando. La entrada puede
continuar su movimiento (no necesariamente con velocidad
constante) y su salida debe moverse conforme a ella a fin
de mantener un error nulo o pequeño.
Su salida varia regularmente sin discontinuidades en
función de la señal de error.
Pueden ser:
— Modo Proporcional
- Modo Integral
- Hodo Derivativa
- Modo Combinado: PI , PD, PID
2.63

Control de Modo Proporcional
Dentro de un rango determinado su salida es única
para cada valor de error en la entrada.
p(t)
e(t) P(t)
Kpe(t)
-^ t
Fig . 2.2B Diagrama de bloques y respuestadel control ador proporcional
Como se Indica en la fig. 2.28 su voltaje de salida
es proporcional al de entrada. Debido a la ausencia de
una constante de tiempo se obtiene una respuesta rápida.
Se tienen las relaciones:
p(t) = Kp e(t)
PCS) = Kp E(S)
de donde:
PCS)Kp =
E(S)
2.64

En general la señal de error es de cualquier forma y
la salida del control ador es proporcional a éste. La fIg.
2 . 29 muestra un con tro lado r proporcional .
R=a
donde :
Pe
Pe (7.)< Kpo.
Saturación
bandaproporcional
FIg. 2.29 Controlador Proporcional
Pe = Kp e + Po
Kp = _
(2.40)
(2.41)R:
y representa la ganancia del controlador, siendo Po la
salida del controlador para e = O.
Bp = (2.42)dPc
de
Kp
2.65

100Bp(7.) = 4 BANDA PROPORCIONAL
Kp
Dependiendo del signo del error, cuando estos
exceden la B.P. la salida del controlador se satura en
1007. ó 07-. " E l control proporcional esencialmente es un
amplificador con ganancia variable ".
OFFSET
Este produce un error residual
permanente denominada OFFSET entre la salida deseada y la
salida actual de voltaje cuando ocurre un cambio en
carga (figura 30).
la
P (7.)
100error Offset
Fig. 2. 3O Offset en control proporcional
Se puede minimizar aumentando Kp, pero este aumento
a la vez reduce la banda proporcional B.P. Además La
variación de Kp influye en la ESTABILIDAD del Sistema.
2.66

:i
Par esta limitación (desventaja) se emplea en
procesos donde no es probable que existan cambios en la
carga ó con pequeños tiempos de retardo en el proceso a
fin de poder tener una pequeña B.P. Su ventaja es que
permite un control simple.
La salida del controlador y el error pueden ser
expresados en voltaje, entonces la ecuación es la de un
simple "amplificador sumador".
VE
SUMADOR INVERSOR
Fig. 2.31 Circuito de un controladorproporcional
(2-43)
donde
K =
Vo =
— Voltaj'e de salida
R2/R1 ganancia
Voltaj'e de error
Salida con error cero
2. 07

La entrada y la salida son escaladas conveniente-
mente a O — 1007. 64 — 20 mA. La banda proporcional es
ajustada a través de la ganancia R^/R^ - Con un control
manual (reset) ajustamos Va.
Control de Modo Integral
C
dPc/dt
Fig. 2.42 Controlador Integral
Pc(t) = Ki f* edt + Po (2.44)
2.68

donde
Ki = —1/RC? ganancia del controlador integral
Po = salida del controlador para t=0
Ti = 1/Ki = -RC (2-46)
tiempo que demora la acción correctora y que se
denomina CONSTANTE DE TIEMPO INTEGRAL, expresa-
da en [segj
Su salida cambia con velocidad variable dependiendo
del nivel de error ya que dpc/dt = Ki.e- La respuesta es
más lenta que en el modo Proporcional.
PCX)100
EpC/-)
Fig. 2.33 Ejemplo de la respuestaen el control integral
El elemento integral ayuda al controlador (control
PI) a tener valores de salida finitos cuando la entrada
llega a cero, esto elimina el error de control permanente
2.69

del modo Proporcional. Normalmente este tipo de control
no se lo usa solo sino combinado con otros tipos de
control. En diagrama de bloques se "tiene la figura 2.34
Este control es usado cuando la respuesta
transitoria de un sistema de control realimentado se
considera satisfactoria, pero el error en estado
estacionario se considera excesivo.
e(t)
P(S)
, P(t)
- t
Fig. 2.34 Diagrama de bloques y respuestade un controlador integral.
Como se aprecia en la ecuación 2.47 la señal de
control continúa aumentando mientras persiste el error, y
2.70
esta señal de error baja a cero cuando se ha aumentado
suficiente la señal de actuación.
p = Ki f e dt (2.47)
Ki ECS)P(S) = (2.48)
En el control proporcional no existe integrador 1/s
en su función de transferencia, consecuentemente existe
un error o corrimiento en la respuesta a una entrada
escalón; al incluir la acción integradora eliminamos este
problema.
En control integral, la salida en cualquier instante
es la superficie bajo la curva de la señal de error que
actúa hasta ese momento, es decir, la señal de error
puede valer cero en algún instante, mientras que la señal
del controlador es diferente de cero, o sea tiene valores
de salida finitos cuando la entrada (error) 1 lega a cero
Cesto no sucede en los controladores proporcionales).
Se lo denomina también "Desajuste Automático", su
ventaj'a es que minimiza el error en estado estacionario
(sin preocuparse de la parte transitoria). Elimina el
OFFSET del control proporcional.
2.71

e(t) e(t)
p(t)
(a) Integral
/\)
1 p-~ l
(b) Proporcional
Fig. 2.35 Respuestas de controladorIntegral y Proporcional
El control integral puede hacer de un sistema de
2do. orden uno de 3er. orden, y dependiendo del valor de
su ganancia (K*) puede llegar a la inestabilidad.
Se tiene el siguiente circuito electrónico para im-
plantar un controlador integral
INTEGRADOR AMPLIFICADOR-SUMADGR
INVERSOR
Fig . 2.36 Circuito de un Controlador Integral
2.72

donde:
Vout = Ki Ve- dt + Va (2- 4-9)
VOLJ-T = voltaje de salida
KI = 1/RC ganancia de Integración
VE = voltaje de error
Vo = voltaje de salida Inicial
Los valores de R y C pueden ser ajustados para
obtener el tiempo de Integración deseado. La salida
inicial del controlador Vo es importante porque la salida
de Integración a distintos valores depende de la historia
del error.
Control de Modo Derivativo
FIg. 2.37 Control Derivativa
La salida del controlador depende de la velocidad de
cambio del error. Su ventaja es que responde a la
velocidad de variación del errar y puede ejercer una
corrección significativa antes de que el error se haga
excesivo.
2.73

El control derivativa se denomina "control de
anticipación", ya que se anticipa al error actuante y
tiende a aumentar la estabilidad del sistema.
Su acción es más significativa en la parte
y no en la estable, disminuyendo el
sobreimpulso. No puede ser usado solo cuando el error es
cero o constante, ya que su derivada es igual cero y su
salida sería cero ó P(0), por eso se usa en combinación
con otros controladores.
¿«¿ El control derivativa añade amortiguamiento al
sistema y permite el uso de una ganancia K más elevada,
mejorando la exactitud.
dep«(t) = KD + P(0) (2.50)
dt
P(S) = S Ko ECS) (2.51)
donde
KD : Constante de ganancia derivativa
2.74

PC/.)
100
error
Pc(X.
100
50 -L r
Fíg. 2.38 Respuesta del Controladorderivativo
Realmente, en la práctica es imposible tener un con-
trol ador derivativo puro debido a la resistencia de la
fuente. Estos requieren lentas variaciones de entrada a
fin de limitar su salida y por ello no se los usa solos.
2.75

P«(t) =dEp
dtPÍO) (2-52)
donde:
P = salida del controlador en 7. de full salida
P(Q) = salida del control derivativa cuando Ep=0
(sin error o error constante)
Ko = constante de tiempo derivativa (seg)
(ganancia derivativa)
Ep = error en 7. de full escala
Rl
DERIVADOR INVERSOR
Fig. 2.39 Circuito de un ControladorDerivativa.
La resistencia Rl se añade por estabilidad contra
cambios rápidos de la señal.
'OLJ-T — NO (2.53)dt
donde:
= voltaje de salida
2.76

= R=n;C tiempo derivativo en segundos
= voltaje de error
Rx se determina por la condición:
2TifRiC « 1 (2.54)
siendo f la frecuencia expresada en Hz-
CONTROLES COMBINADOS
Controlador Modo Proporcional Integral PI
Combina las propiedades del Proporcional e Integral.
Elimina la desviación de estado estable (offset) que
produce el modo proporcional ayudado por la acción
Integral. El elemento proporcional ayuda a acelerar la
respuesta. Se pueden producir sobretiros excesivas por
la acción Integral antes que el error pueda ser reducido
a cero.
KPp(t) = Kp e(t) + . | e(t) dt (2.55)
Ti
Kp E(S)P(S) = Kp ECS) + (2.56)
TI S
P(S) Kp= Kp + (2.57)
E(S) TIS
2.77

P(S)
ECS)= Kp (2.58)
TiS
donde:
Kp = ganancia proporcional
Ti = tiempo integral
Tanto Kp como Ti son regulables. Ti afecta a la
acción integral y Kp lo hace a la acción proporcional e
integral.
-o"1
' í»- Kp
Kp
TiS
*E
Kp1 "I
!•*•TiS
Fig. 2.40 Diagrama de bloquesdel Controlador PI
El factor I/Ti se denomina frecuencia de reposición
y es el número de veces por minuto que se duplica la
parte proporcional de la acción de control.
Este tipo de controlador se implanta mediante el
circuito mostrado en la fig. 2.42
2.78

e(t) e(t)
Función escalón
2Kp
Kp
TI- t
^IntegralI•Proporcional
FIg. 2.41 Respuestas del controlador PI
R2 C
VinRl•AAr Vout
FIg. 2.42 Circuito del Controlador PI
NOTA: Al circuito Indicado se debe añadir un Inversor.
Vout = Vin + Vin dt (2 - 59 )
Vout = Vin + Vin dt (2.6O)
2.79

Se puede ajustan
Banda Proporcional con Kp = Riz/Ri (2.61)
Ganancia de integración con K¿. = 1/R3C (2.62)
Controlador de modo Proporcional Derivativo PD
Usado para controlar errores que varían rápidamente
con la condición de que el offset sea muy pequeño
(desviación del error en estado estable), ya que este
sistema no elimina el offset del modo proporcional.
de(t)p(t) = Kp e(t) + Kp Kd (2.63)
dt
P(S)= Kp (1 + KdS) (2.64)
E(S)
Kp : ganancia proporcional
Kd : ganancia derivativa
Los valares de Kp y Kd san regulables
A la "Acción Derivativa" se le denomina "Control de
Velocidad" ya que su salida es proporcional a la
velocidad de variación del error.
2. SO
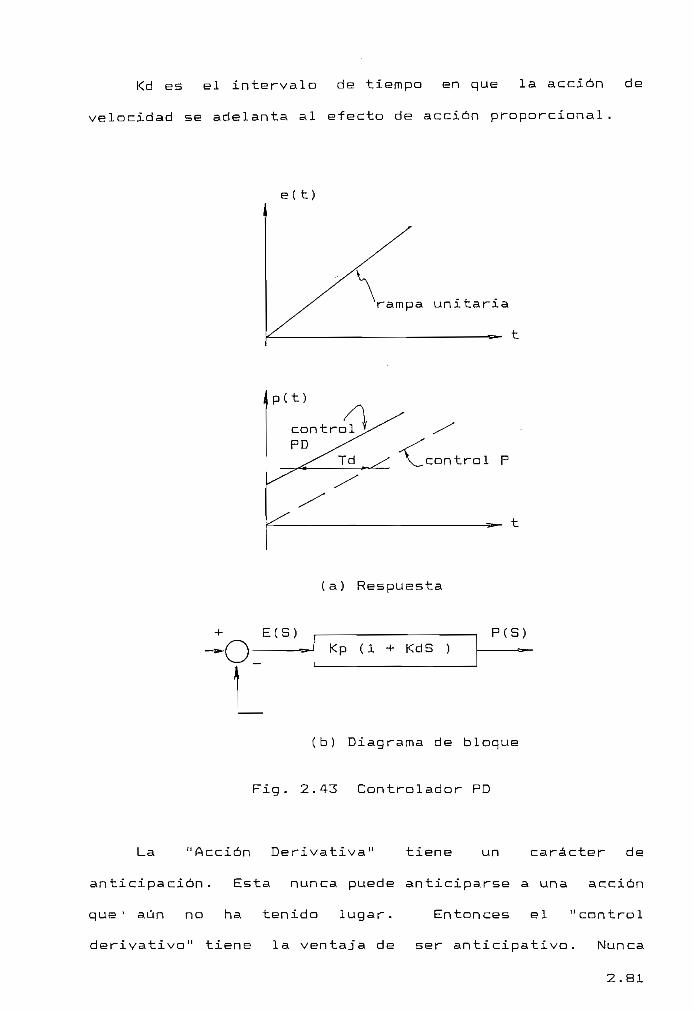
Kd es el intervalo de tiempo en que la acción de
velocidad se adelanta al efecto de acción proporcional.
e(t)
rampa unitaria
i P(t)
control P
»- t
(a) Respuesta
O:i
Kp (1 + KdS )PCS)
(b) Diagrama de bloque
Fig. 2.43 Controlador PD
La "Acción Derivativa" tiene un carácter de
anticipación. Esta nunca puede anticiparse a una acción
que1 aún no ha tenido lugar. Entonces el "control
derivativa" tiene la ventaja de ser anticipativo. Nunca
2.81

se puede tener esta acción sola. Su desventaja radica en
que puede amplificar ruido y saturar el accionador.
Se tiene la conexión en cascada de proporcional más
derivativo.
dEpp = KpEp + KpKd PÍO) (2.65)
dt
Este sistema no elimina el offset del modo
proporcional.
Ep(7.)
error
r.proporcional
r. derivativa
fc
Fig. 2.44 Respuestas del Control PD
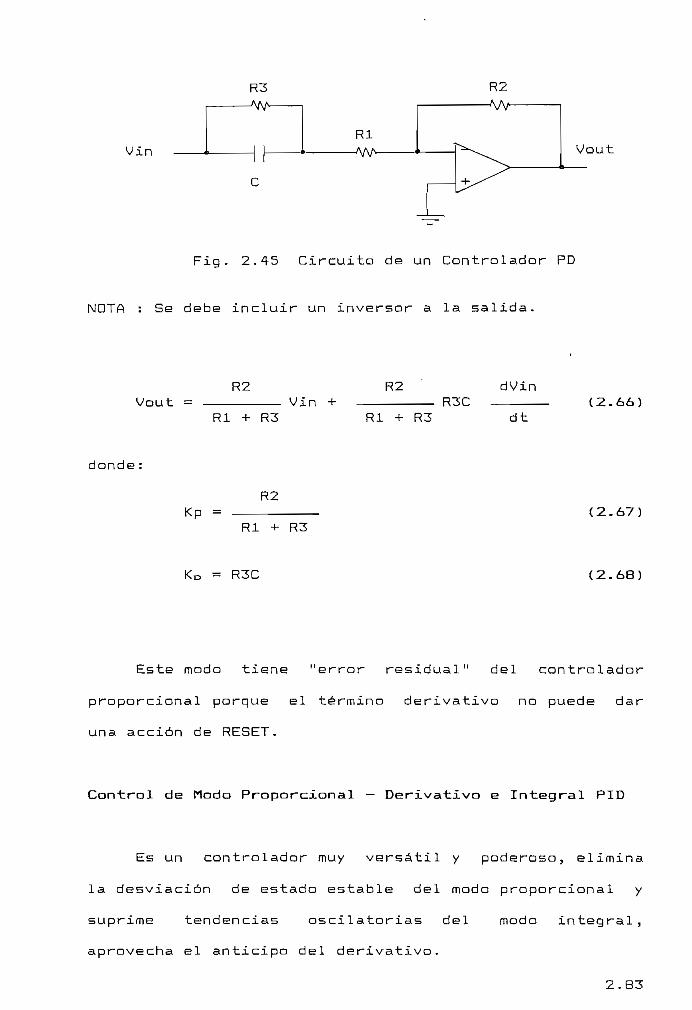
En la figura 2.45 se tiene el circuito para este
controlador.
2.82
R3 R2
VinRl
Vout
FIg. 2.45 Circuito de un Controlador PD
NOTA : Se debe Incluir un Inversor a la salida.
R2Vout =
Rl + R3Vin
R2 dVín. R3C (2.66)
Rl + R3 dt
donde:
R2Kp =
Rl + R3
Ko = R3C
(2.67)
(2.68)
Este modo tiene "error residual" del contralador
proporcional porque el término derivativo no puede dar
una acción de RESET.
Control de Modo Proporcional — Derivativo e Integral PID
Es un controlador muy versátil y poderoso, elimina
la desviación de estado estable del modo proporcional y
suprime tendencias oscilatorias del modo Integral,
aprovecha el anticipo del derivativo.
2. 83

Kp(l + TiS P(S)
TiS
a) diagrama de bloques
e(t)
rampa unitaria
PID
Acción PD
Fig. 2.46 Control PID
1 depc(t) = Kp í e 4- fedt + Td
Ti dt J(2.70)
Kp = ganancia proporcional
Ti = tiempo de acción integral
Td = tiempo de acción derivativa
2.84
Pc(S) 1= Kp 1 + Td S + . (2.TI)
E(S) TiS
Se pueden variar las constantes proporcional y las
de tiempo a fin de compensar las características de
tiempo del sistema.
dEpp = KpEp + KpKi PEpdt + KpKd + P(0) (2-72)
dt
donde:
P = salida del control ador en 7. de full escala
Ep = error en 7. del máxima
Kp = ganancia proporcional
Ki = ganancia integral
KD = ganancia derivativa
P(0) = salida nominal del controlador
El término error cero del modo proporcional no
es critico porque el integral acomoda automáticamente por
offset y nominal setting.
2.85
Vin
Vout
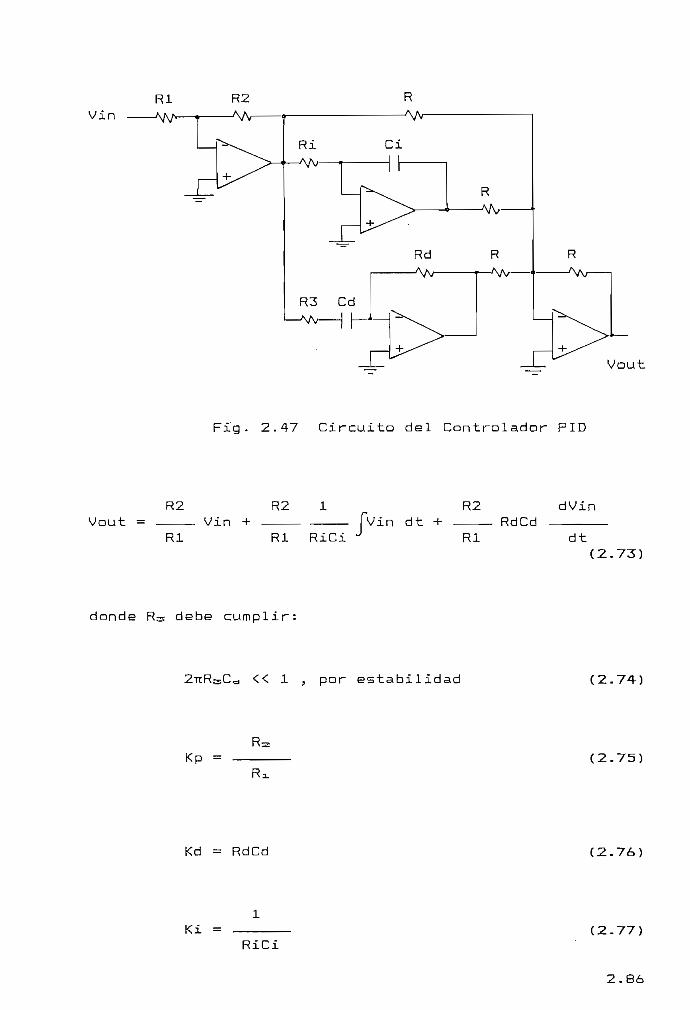
Fig. 2.47 Circuito del Controlador PID
R2 R2 1 R2 dVinVout = . . Vin + . fvin dt + . RdCd
Rl Rl RiCi Rl
donde R^ debe cumplir:
dt(2-73)
« 1 9 por estabilidad (2.74)
Kp = (2.75)
Kd = RdCd (2.76)
Ki =RiCi
(2.77)
2-86

2.2.2. Selección de Controladores
Deben tomarse en cuenta los siguientes factores
12 Exactitud - precisión
2° Constante de tiempo en el sistema
32 Respuesta del controlador
42 Ruido
1°. Exactitud — precisión
Con el controlador proporcional existe
¿fe- permanentemente error en la regulación del circuito.P ^ y
Entonces dependiendo del tiempo de retardo presente en el
sistema se pueden emplear los contraladores PD ó PID.
2° Constante de tiempo presente en el sistema
La presencia de elementos retardadores de tiempo en
el sistema afecta su respuesta, los mismos que se pueden
reducir o minimizar con controladores PID, PD ó PI.
El controlador PID es apropiada para circuitos que
tienen grandes constantes de tiempo.
2.87

39. Respuesta del Control ador
El control ador proporcional tiene una respuesta
rápida comparada con la del integral. Sin embarga tiene
el problema de error permanente.
4S Ruido
Los controladores derivativos dan una respuesta
extremadamente rápida. Anticipan lo que va a suceder y
aplican la acción correctiva. El ruido se Intensifica en
los sistemas por la acción derivativa.
Para escoger el tipo de controlador hay además que
considerar:
— Seguridad
— Economía
— Naturaleza de la planta
- Peso, etc.
2.3 SERVOSISTEMA ft IMPUEMENTARSE
2.3.1 INTRODUCCIÓN
El servomecanismo que se construye en el presente
estudio se denomina "Servomecanismo con control análogo
de presión mecánica", cuya finalidad es sujetar objetos
2.88
con la precisión mecánica mínima necesaria y suficiente
en función directa del peso y de la naturaleza de las
superficies de contacto (control automático).
Este servomecanismo también puede sostener cuerpos
con pesos mayares ( control manual ), es decir aquellos
que están fuera del rango automático. Actuando en este
punto a manera de grúa que sostiene cuerpos con una
presión mayor a la necesaria sin ocasionar daños al
cuerpo.
La sujeción de los objetos está controlada con un
sensor (transductor) de presión colocado en la placa de
sujeción; es decir , éste proporciona la "señal medida",
en función directa de la cantidad de presión ej'ercida.
El valor referencial se obtiene de un sistema tipo
balanza (control automático) o con un potenciómetro (con-
trol manual). Este valor se compara con la señal medida
de realimentación del sensor de presión.
El Servomecanismo emplea dos tipos de sensores: el
sensor de fuerza que está colocado en la balanza que
proporciona el valor referencial, y el de presión
colocado en una de las placas que suj'eta al cuerpo.
El servosistema así constituido nos dará una visión
práctica del funcionamiento de servomecanismos, sistemas
2.89
de control analógico, sensores y acondicionadores
C transductores) , asi como también el diseño y
construcción de circuitos electrónicos que ejecutan todas
las acciones de control, etc.
De esta manera se abarcan dos campos : el primero,
la teoría y práctica de sistemas de control y el segunda
el campo electrónico, tomando en cuenta además la serie
de limitaciones que existen en nuestra medio coma por
ejemplo la falta en el mercado de los sensores de presión
para este tipo de equipos especiales, asi como también el
factor económico que es muy importante tomarlo en cuenta.
2.3.2 PROTOTIPO A CONSTRUIRSE.
"SERVOMECANISMO DE CONTROL ANÁLOGO DE PRESIÓN MECÁNICA"
El dispositivo sujetará cuerpos con la presión
necesaria y suficiente en función directa del peso y
demás características de los mismas. El peso del cuerpo a
sujetarse será de un valor constante dentro del rango
comprendido entre los valores máximo y mínimo de peso que
pueda sostener el servomecanismo; es decir que el cuerpo
objeto de la experiencia no debe variar en peso, ni forma
física dentro del tiempo en que se realiza la sujeción.
Cabe indicar que la presión necesaria depende además
de la naturaleza, forma del cuerpo y coeficiente de
2.90
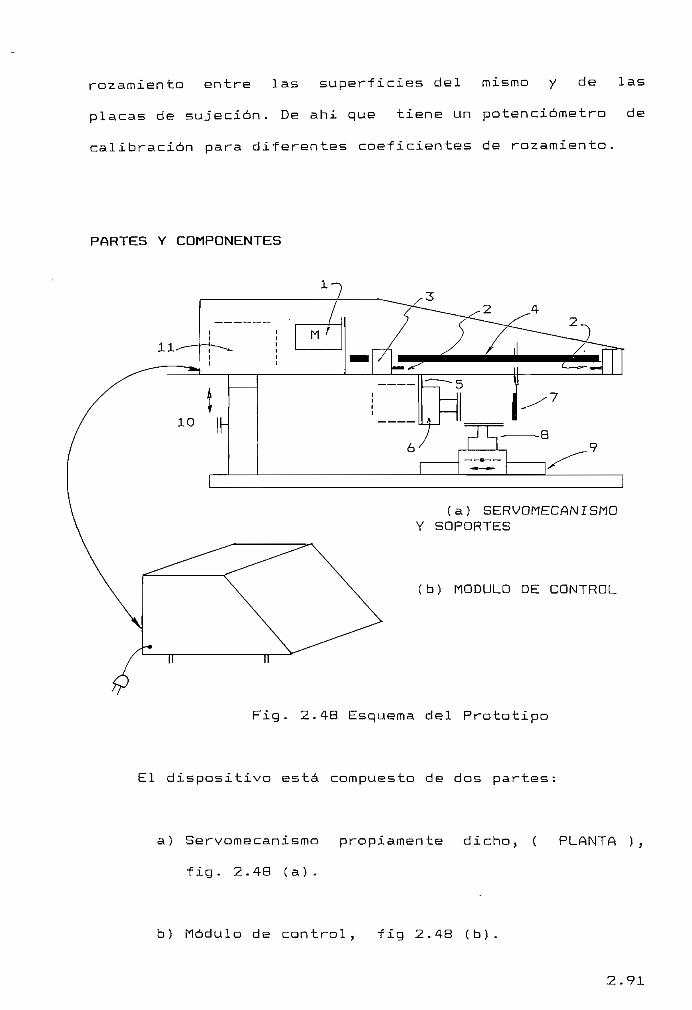
rozamiento entre las superficies del mismo y de las
placas de sujeción. De ahí que tiene un potenciómetro de
calibración para diferentes coeficientes de rozamiento.
PARTES Y COMPONENTES
(a) SERVOMECANISMOY SOPORTES
(b) MODULO DE CONTROL
Fig. 2.48 Esquema del Prototipo
El dispositivo está compuesto de dos partes:
a) Servomecanismo propiamente dicho, ( PLANTA ),
fig. 2.48 (a).
b) Módulo de control, fig 2.48 (b).
2.91

a.- SERVOMECANISMO Y SOPORTES
Esta formado por:
1.— Servomotor
2.— Switche de fin de carrera
3. - Cojinetes ( ru liman es )
4.— Tornillo sin fin
5.— Placa de ajuste fija
6.— Sensor de Presión
7 .— Placa de ajuste móvil
8.— Balanza referenclal con sensor de fuerza
9.™ Riel para deslizar la balanza según el
tamaño y forma del cuerpo
10.- Tornlllo para regular la altura del
conjunto superior ( placas de sujeción }
11.- Amplificador de potencia
b. MODULO DE CONTROL
Que contiene:
1.— Fuente de corriente continua ± 15 VDc
2.~ Acondicionadores de los sensores de
presión y fuerza
3.— Detector de error
4.— Selectores, Interruptores, ete. para
operar el servomecanismo.
2.92

a) Servomecanismo propiamente dicho.— es el que
realiza la acción de sujeción de los objetos
(planta). Y esta formado por:
• sistema mecánico:
— soporte mecánico
— sistema de engranaj'es
- tornillo sin fin
- placas de suj'eción
— sistema tipo balanza
• sistema eléctrica—electrónico de potencia
— servomotor DC (control por armadura)
— switches de fin de carrera
— sensores—transductores de presión
y/o fuerza
— amplificador de potencia
— fusibles de protección
b) Módulo de control.— Es un módulo físicamente
independiente al anterior (aunque se encuentran
Ínterconectados eléctricamente); éste tiene como fin
el control del funcionamiento del servomecanismo.
En su interior contiene:
— fuente de energía DC para alimentar el sistema de
fuerza y el de control.
2.93

NOTA: es claro que en sistemas de mayor potencia la
fuente DC sólo alimenta el control, pero dado que
este es un prototipo pequeño la misma fuente nos
servirá para energizar tanto fuerza como control.
En servosistemas de mayor potencia se tiene dos
fuentes independientes; una de gran potencia que
proporciona la energía necesaria para mover la
planta C servomecanismo) que puede ser DC ó AC , y
otra de mucha menor patencia a fin de energizar todo
el sistema de control. Asi P°r ejemplo un sistema
de control da órdenes de dispara a tiristores de
potencia que energizan servomotores de alta potencia
que a su vez mueven plantas de procesamiento.
acondicionadores, que son los que procesan la señal
proveniente de los sensores tanto de presión como de
fuerza (en la práctica y dependiendo de distancias y
demás condiciones se pueden tener sensor y
transductor juntos).
controladores , que en nuestro caso no son
necesarios, dada la relativa lentitud con que se
mueve el servomecanismo, esta condición favorece
nuestro control de presión ya que no se producen
ciclaj'es alrededor del punto de error igual a cero.
2.94

— demás circuitos eléctricos y electrónicas necesarias
para el control (tarjetas con circuitos impresos)
etc.
— fusibles de protección.
En su parte exterior se tiene:
— luces piloto indicadoras del funcionamiento de las
etapas más importantes.
— switches, pulsadores, selectores y cursores para
operar el servomecanismo (mandas de control).
— potenciómetros de calibración y/o ajustes (como por
ej'emplo valor referencial, etc.).
Demás detalles constructivos se explican en el
Capitulo IV, correspondiente a diseño y construcción.
Las órdenes estarán comandadas desde el módulo de
control el que enviará señales al servomecanismo para que
éste realice una determinada acción de salida; que en
este caso es sostener obj'etos.
2.95

CGnPQNENTES
• Servomotor.— es un motor DC controlado por armadura,
campo de Imán permanente.
VaDc = 12 V (nominal)
la = O.3 A (nominal)
• Sistema de engranajes.- está acoplado con el
servomotor a fin de reducir su velocidad.
• Tornillo sin fin.— conectado al último engranaje,
gira en base a dos cojinetes colocados en sus
extremos.
Tanto el servomotor como el sistema de engranaj'es
son elementos que ya estaban construidos y que se
los adquirió como "chatarra". Hay que notar que
básicamente este servomecanismo empleará elementos
ya existentes, y se acoplarán a éstos los demás
controles (esto es generalmente lo que sucede en la
práctica, es decir, que la planta ya existe y es a
ésta a la que se acoplan todos los elementos de
control para tener un funcionamiento adecuado y
lograr una determinada acción de control).
• Switches de fin de carrera.— son dos swiches
colocados en los extremos máximos del tornillo sin
2.96
fIn, éstos limitarán los rango máximo y mínimo en
los cuales se abre o cierra la placa móvil (o dicho
en otras palabras limitan el tamaño máximo y mínimo
del objeto a sostenerse). Emplea los contactos
normalmente cerradas, y van conectados en serie con
la alimentación + y - del amplificador de patencia
que energiza al servomotor. Cuando la placa llega a
uno de estos switches, sus contactos se abren
desconectando la alimentación (+) o (—) al
servomotor y protegiendo de esta manera el daría del
amplificador de patencia y también del motor- En el
caso presente estos contactos pueden manejar
directamente la corriente del servomotor.
Sensor de presión y fuerza.- Estos sensores más
sus acondicionadores (que en este caso van montados
en el módulo de control) forman los denominados
transductores. Coma se indicará en el capítulo III
existe una gran variedad de sensores tanto de
presión cama de fuerza cuyo uso dependerá del rango,
utilización, precisión, etc. que necesite el
sistema. Existen sensores fáciles de construir así
como también otros más avanzados que son fabricados
de manera especial; en nuestro medio éstos últimos
vienen ya sea como parte constitutiva de equipas o
deben ser exportados expresamente por una deter-
minada función y coma es lógico tienen un costo muy
elevada, lo cual sale de nuestro alcance al
2.97

pretender construir un prototipo experimental,
además de ser difíciles de conseguir. Concretamente
en la ejecución de este servomecanismo se ha
experimentado la construcción y uso de dos tipos de
sensores dada su economía, facilidad de construcción
y mantenimiento, fáciles de conseguir en el mercado
aunque adolecen de precisión.
Dentro de estos sensores tenemos:
a) sensor de esponja semiconductora
b) sensor potenciométrico, que es el que se
utiliza en este sistema, sus detal les
constructivos y características se indican más
adelante.
El sensor patenciométrico se pueden emplear en
nuestro caso como sensores de presión o fuerza. El
sensor de fuerza proporciona el valor referencial y
está instalada en el sistema tipo balanza; en
cambio, el sensor de presión proporciona el valor
medida (laza de realimentación) cuyo voltaje de
salida es función directa de la presión que se
ejerce sobre el cuerpo a sostenerse que tiene un
peso y características " fijas. Cabe indicar que las
salidas de estos dos transductares (valar refe—
rencial y medida) son las que se comparan dando como
resultado la señal de error. En la balanza el
2.98
sensor actaa como sensor de fuerza (valor
referencial) y en la placa de sujeción actúa como
sensor de presión (valor medido).
• Amplificador de potencia.— por las ventajas anotadas
en el numeral 2.1.4-2, se emplea el amplificador de
potencia tipo "T" con dos transistores
complementarlos tipo Darlington. Se incluyen dos
fusibles como protecciones y además los swiches de
fin de carrera.
• Fuente DC.— todo el equipo se alimenta de la red
normal de 120 VAC3 60 Hz . Para nuestra aplicación
se requiere voltaje continuo de ±15 VDC, 1.5 A de
salida que serán precisamente los valares que
suministra la fuente que se uti1 iza. Esta fuente DC
va instalada en el módulo de control y alimentará el
sistema de control y fuerza.
• Placas de ajuste.— son dos placas que serán las que
normalmente sujetarán (sostienen) al cuerpo. Una
placa es móvil en conjunta con el tornillo sin fin,
es decir que el gira de éste último deslizará la
placa en sentido horizontal, ésta presionará el
cuerpo sobre la otra placa fija. Es decir, se
transforma el movimiento circular del tornillo en
movimiento rectilíneo de la placa de ajuste. La
segunda placa es fija justamente porque contiene el
2.99

sensor de presión (no es móvil a fin de no perturbar
las mediciones provenientes del sensor de presión).
• Diversos circuitos eléctricos y/o electrónicos que
ayudarán en todo el proceso de control:
— comparadores
— sumadores
— amplificadores
— acondicionadores
— control adores etc.
Las características de estos elementas se indicarán
en el capitulo IV, correspondiente a diseño y
construcción.
CONTROLES EXTERIORES Y LUCES INDICADORAS
Se encuentran ubicados en el panel de control.
fuerza
SWITCH GENERAL energiza la fuente DC
control
Con este switch se activa-desactiva la alimentación
(AC-120V) a todo el sistema, es decir, energiza
tanto fuerza como el control; se tiene dos leds
indicadores de esta operación.
2, 100

53 acciona el control (conecta entrada al amplificador)
Conecta la salida del control a la entrada del
amplificador de potencia, es decir da paso a la
señal de error a fin de que ésta controle al
amplificador de potencia. La finalidad de incluir
este S3 es la de tener desactivada la etapa de
potencia mientras se realizan las operaciones
preliminares al ajuste mismo; es decir, colocar el
cuerpo (ó valor referenclal), poner las placas en
posición, mover el brazo al sitio adecuado ? ete.
Cuando todo esto está listo, entonces si activamos
S2. De Igual manera se desactivará al terminar la
operación de ajuste (al aflojar el cuerpo).
54 selector de 4 posiciones, usado para:
- abrir las placas (—Vcc)
- cerrar las placas (+Vcc)
- automático / control manual
— apagado
Este debe ser un selector de 4 posiciones con posi-
ción central fija (esta posición mantiene conectado
permanentemente el servomotor a la salida del
amplificador de potencia). En las otras dos
posiciones conecta el motor directamente a -Wcc o
a —Vcc dependiendo si se desea separar o acercar las
2. 101

placas; esta operación es necesaria para colocar las
placas con respecto al cuerpo.
S2 selector de 4 posiciones:
- cuerpos lisos vidrio IAUTOMÁTICO
— cuerpos rugosas esponja I
— manual y pesos mayores
- apagado
Este selector permite trabaJar en forma automática ó
manual, además se puede acondicionar la señal de la
balanza dependiendo de la característica de la
superficie del cuerpo ( en nuestro caso cuerpos
lisos de vidria o rugosos de esponja). Como es
lógico proporciona un valor referencial diferente
según sea la característica del cuerpo. En control
manual permite el paso del valar referencial de un
potenciómetro PM manual.
PM Potenciómetro de valor referencial manual (PM)
Con la regulación de PM se puede sostener cuerpos
fuera del rango automático y además cuerpos de pesos
mayares al máximo (siempre que se tenga patencia
suficiente del servomotor y no dañen al objeto a
sostenerse).
2.102

PC Potenciómetros de calibración para ajuste
Este potenciómetro es de calibración fina, es decir,
calibra el ajuste al final. Consecuentemente si
luego de que se detiene el servo en el aj*usté, con
PC se puede colocar un poco más de aj'uste según sea
el caso.
PA Este potenciómetro permite calibrar el valor AMUERTO
y a la vez aumentar un poco más el aj'uste sobre el
cuerpo.
SI Swltch para almacenar Información referencial de la
balanza.
Este tiene su función en operación automática ya que
mediante éste se almacena (memoriza análogamente—
carga) el valor referencial de la balanza hasta
terminar el proceso de aj'uste, luego se borra
(descarga) este dato con el mismo SI.
PROTECCIONES DEL SERVOMOTOR Y AMPLIFICADOR DE POTENCIA
S5 y S6 Switches de fin de carrera
Mientras la placa este dentro del rango de trabaj'o
estos swltches mantienen conectado el amplificador
de patencia ? cuando la placa sale del rango (máximo
2. 103

o mínimo) estos desactivan el amplificador de
potencia protegiendo de esta manera la etapa de
potencia y el servomotor. En aplicaciones de mayor
potencia los switches de fin de carrera
desconectarán contactares, tiristores? los que a su
vez manejan servomotores de gran potencia.
F3 y F4 Fusibles de protección del amplificador de
potencia.
Protegen al amplificador de patencia de sobrecargas
que se producen en el servomotor (equivalente a un
relé de sobrecorriente en control de motores), así
corno también de una conducción simultánea de los dos
transistores complementarios que conforman el
amplificador, la que de suceder provocaría un corto-
circuito entre -Wcc y —Vcc.
Fl y F2 Fusible principal de alimentación DC de la
fuente.
Protege todo el equipa de control al producirse
alguna sobrecarga o corto—circuito en el
servosistema.
2. 104
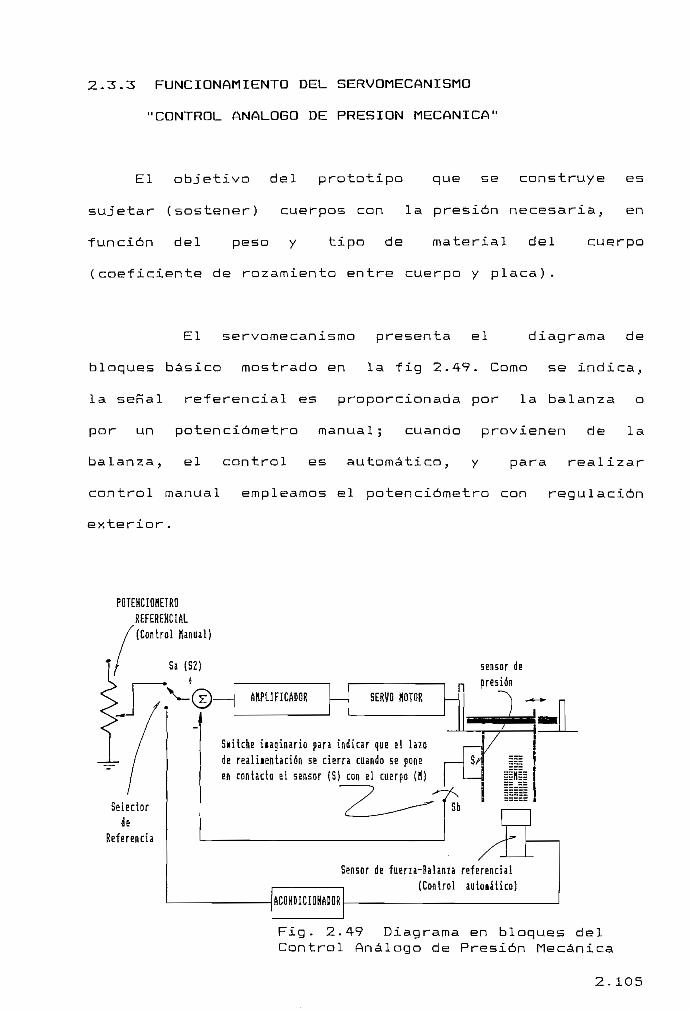
2.3.3 FUNCIONAMIENTO DEL SERVOMECANISMO
"CONTROL ANÁLOGO DE PRESIÓN MECÁNICA"
El objetivo del prototipo que se construye es
sujetar (sostener) cuerpos con la presión necesaria, en
función del peso y tipo de material del cuerpo
(coeficiente de rozamiento entre cuerpo y placa).
El servomecanismo presenta el diagrama de
bloques básico mostrado en la fig 2.49. Como se indica ?
la señal referencial es proporcionada por la balanza o
por un potenciómetro manual; cuando provienen de la
balanza, el control es automática, y para real izar
control manual empleamos el potenciómetro con regulación
exterior.
PflTEHCIOflETRO^REFEREHCIAL(Control fianual)
Sa (S2)
Referencia
AHPLIFICADQR SERVO HOT0R
sensor depresión
Suitche isaginar io p a r a i n d i c a r que el lazode real i ientación se cierra cuando se poneen contacto el sensor (S) con el cuerpo (S)
Sensor de fuena-Balania referencia l{Control autoiHico}
Fig. 2.49 Diagrama en bloques delControl Análogo de Presión Mecánica
2. 105
El valor medida es la señal que viene del sensor de
presión colocado en la placa fija de sujeción. Es
importante anotar que se tiene control de lazo abierto
(sin real imentación) desde que se energiza el sistema
hasta el momento en que la placa se pone en contacto con
el cuerpo, en este instante se empieza a tener un valor
medida variable conforme aumenta la presión, entonces de
aquí en adelante ya se trabaja en control de lazo cerrado
(con realimentación) hasta sostener completamente el
cuerpo.
En esta última etapa es donde se' cumplen todos los
análisis de módulos matemáticos como la función de
transferencia que se estudió en el subtema anterior y que
además se toma como base para el diseño del Capitulo IV.
Nótese que en el diagrama de bloques de la figura
2.49 se indican dos swiches Sa y Sb. El primero (Sa) es
real (equivale a S2) y va colocado en el panel de control
y queda fuera del lazo de realimentación; (Sb) es swich
ficticio, es decir que no existe en la realidad sino que
se lo introduce en el diagrama de bloques para explicar
el control de lazo abierto (antes de que se toquen el
cuerpo con la placa) y lazo cerrada (desde que se pone en
contacto el cuerpo con la placa). El swich (Sb) cierra el
lazo de realimentación.
2.106

Funcionamiento.—
Básicamente tiene dos tipos de funcionamiento (operación)
a) control automático
b) control manual y pesos mayores
a) Control automático
Como se dijo anteriormente el control real imentado
tiene lugar desde cuando la placa de sujeción se pone en
contacta can el cuerpo y no en todo el proceso de
operación. Esto tiene lógica dado que es Justamente lo
que se desea, es decir, controlar la presión necesaria
para sostener el cuerpo.
Se denomina control automático ya que en este
proceso el valor referencial proporciona el sistema tipo
balanza en función directa con el peso del cuerpo; este
valor referencial será acondicionado dependiendo del tipo
de superficie, material, rugosidad del cuerpo, ya que
suponiendo que la superficie de las placas no cambia,
éstas deben realizar mayor presión si los cuerpos son de
superficies lisas, y viceversa, menor presión si éstas
superficies son rugosas, ya que se tiene un mayor
coeficiente de fricción entre las superficies de las
placas y el cuerpo.
2.107

Consecuentemente un mayor coeficiente de rozamiento
entre estos dos materiales ayuda a realizar menos presión
para sostener cuerpos que siendo de igual peso tienen
menor coeficiente de rozamiento. También se podría decir
que a menor coeficiente de rozamiento (o mayor peso) se
hace necesario un mayor valor referencial sea este manual
o automático. En el capitulo VI se hace el análisis
numérico y gráfico del voltaje de salida del sensor de
presión como una función directa con el peso a sujetarse
y de sus superficies9 pero en resumen estas curvas son
como se indica a continuación en la fig. 2.50
Vout Sensorde Presión
Vmáx
Vmin
superficieslisas
superficiesrugosas
W
Fig. 2.50 Voltaje de salida del sensorde presión como función del peso
del cuerpo y las superficies de lasplacas de sujeción.
2.108
Superficies del cuerpo
1 lisas 4 Ej . vidrio
2 medias «* Ej - hierro
3 rugosas 4 Ej. caucho-esponja
De estas curvas se ve claramente que para un mismo
peso se necesita mayor presión (mayor VOUT del sensor)
mientras más lisas sean las superficies en contacto. He
ahí la justificación de porgué la superficie de las
placas debe ser de un material rugoso (Ej . esponja,
caucho); debido a esto se utiliza esponja y se aumenta el
rango de pesos a sujetarse.
Nótese, que estos valores necesarios para sostener
el cuerpo tomados de las curvas de funcionamiento del
sensor de presión, son las que se deben colocar como
referencia (manual o automática) a fin de que al
compararse con el valor medido proporcionen la respectiva
señal de error.
El control automático en este caso cubre un rango
pequeño de pesos debido a que al comparar las curvas de
respuesta de los sensores de presión y fuerza, se
pretende trabajar en la zona lineal común para todos los
sensores y ésta resulta ser pequeña; éstas curvas se
explicarán más detalladamente en la sección 5.2 y 6.2.2.
Sin embargo de ser una zona pequeña por lo limitante de
2.109

la respuesta de los sensores, si cumple nuestro objetivo
de demostrar su operación y funcionamiento.
Este rango de trabajo se puede ampliar empleando
unos sensores de mejor calidad y linealidad en su
respuesta; asi como también con un sistema tipo balanza
referencial mucho más preciso.
b) Control Manual y Pesos Mayores
— Manual
A diferencia del proceso anterior la referencia la
coloca el operador (hombre) de manera manual con un
potenciómetro referencial PM donde se tendrá marcado las
referencias en voltios correspondiente a los diferentes
pesos y tipos de cuerpos. Las calibraciones que se
realizan en este potenciómetro son en base a las curvas
medidas en el sensor de presión al realizar pruebas y
mediciones para sostener los diversos objetos según se
indica en el capitulo V. En esta etapa no se emplea el
sistema tipo balanza.
Tanto en control manual, como en automático se tiene
la posibilidad de realizar ajustes con potenciómetros de
calibración para el sostenimiento del cuerpo.
2.110

— Pesos Mayores
En esta sección puede darse el caso de sostener
cuerpos cuyo peso es superior al máximo de control
manual, para lo cual es necesario colocar el
potenciómetro PM en su mayor posición, con lo que se
consigue tener en todo instante un valor de error mayor
al mínimo que se necesita para mover el servomecanismo,
dando entonces un movimiento permanente al servomotor, el
cual irá deslizando la placa móvil que produce un ajuste
cada vez mayor sobre el cuerpo, movimiento que se lo
mantendrá hasta sostener el cuerpo suficientemente.
Bajo este análisis se puede sujetar cualquier tipo
de cuerpo, siempre y cuando se tenga potencia disponible
en el motor y a su vez no se produzcan daños tanto en el
mecanismo de sujeción como en el cuerpo mismo.
En resumen se tiene las siguientes etapas de
funcionamiento:
12 Automático
— sostiene pesos pequeños
- presión mínima necesaria y suficiente
- el valor referencial está dado por la balanza
2.111
29. Manual
A — sostiene pesos menores o iguales al máximo
(salida máxima que proporciona el sensor de
presión).
- presión mínima necesaria y suficiente
- valor referencial dado por un potenciómetro de
calibración exterior.
B - sostiene pesos mayores al máximo
- presión mayor a la necesaria y suficiente
- valor referencial dado por el potenciómetro de
calibración exterior (caso extremo, éste en su
valor máximo).
En general la forma de operación es la que se
describe a continuación toma como base la fig. 2.51.
Se coloca el cuerpo a sujetarse sobre la balanza A,
la misma que dará un valor referencial dependiendo del
peso del cuerpo (m); luego comienza a deslizarse la placa
C con dirección a la placa D para ponerse en contacto con
el cuerpo (m) y comienza a actuar la realimentación,
momento en el cual actúa el valor medido del sensor (B)
que se está comparando con el valor referencial
proporcionado por la balanza (A) hasta lograr un error
cercano a cero, momento en el cual el cuerpo queda sujeto
con la presión necesaria y suficiente.
2.112

En control manual en cambio, previo al ajuste se
calibrará la presión a ejercerse con el potenciómetro
manual en función de la naturaleza y forma del cuerpo.
Fig. 2.51 Partes principales del servomecanismo
Todo el servosistema se alimenta con red de tensión
normal de 120 VAC.
Antes de comenzar con la operación de ajuste del
cuerpo el servosistema permite realizar variaciones de
las posiciones de la balanza, placa móvil, altura de las
placas, etc., todas éstas en función directa de las
características del cuerpo.
Por último, cabe anotar que la planta se la ha
descrito con mucho detalle en este numeral porque en el
Capitulo IV se procede directamente al diseño y
2.113

construcción del servomecanismo; además de ser éste el
motivo principal de esta tesis.
2.4 FUNCIÓN DE TRANSFERENCIA TEÓRICA DEL SISTEMA
PROPUESTO
Una vez que se tiene en claro el servomecanismo que
se va a construir, es muy conveniente realizar su
representación en diagrama de bloques empleando sus
representaciones matemáticas con la ayuda de la transfor-
mada de Laplace, De esta manera se obtienen las funciones
de transferencia parciales (de cada bloque) y la total
del sistema.
Conociendo la función de transferencia se obtiene el
orden y tipo del prototipo a construirse; además, se
pueden plantear algunos parámetros que conjuntamente con
los ya conocidos de la planta nos proporcionarán una
buena base en cuanto a parámetros de diseño a emplearse
en el capitulo IV, donde se diseña y construye todo el
servomecanismo _
En el Capitulo IV se obtiene la función de
transferencia numérica real por bloques y total, una vez
que se construye el servosistema, y en base a mediciones
realizadas. En el Capitulo VI se realiza el análisis
real de esta función de transferencia.
2.114

Además la función de transferencia permite un
análisis lineal del comportamiento del sistema de control
con realimentación. Se realiza el análisis de la función
de transferencia teórica, que permite a su vez analizar
la respuesta del sistema, estabilidad, error, etc., y por
otra parte proporciona parámetros dentro de los cuales
debe variar el diseño y construcción a fin de no tener un
diseño a ciegas, y obtener de esta manera algunas
respuestas previas del comportamiento del prototipo.
2.4.1 Función de transferencia teórica
Del análisis del diagrama de bloques completo que se
indica en la figura 2.5 se obtiene el diagrama de bloques
real en la figura 2.52.
VrAMPLIFICADOR MOTOR ENGRANAJE
SENSOR-TRANSDUCTOR
Fig. 2.52 Diagrama de bloques del servomecanismo"Control Análogo de Presión Mecánica"
A continuación se tienen las funciones de
transferencia de cada bloque válidas para el rango lineal
del servomecanismo a construirse.
2.115
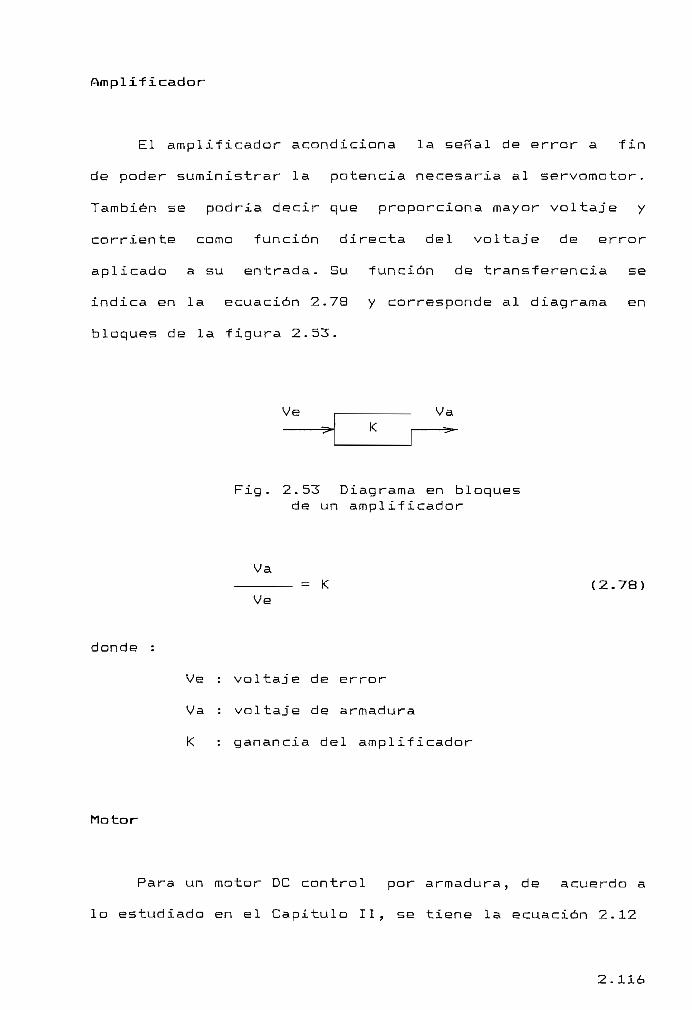
Amplificador
El amplificador acondiciona la señal de error a fin
de poder suministrar la potencia necesaria al servomotor.
También se podría decir que proporciona mayor voltaje y
corriente como función directa del voltaje de error
aplicado a su entrada - Su función de transferencia se
indica en la ecuación 2.78 y corresponde al diagrama en
bloques de la figura 2.53.
Fig. 2.53 Diagrama en bloquesde un amplificador
Va(2.78)
Ve
donde
Ve : voltaje de error
Va : voltaje de armadura
K : ganancia del amplificador
Motor
Para un motor DC control por armadura, de acuerdo a
lo estudiado en el Capítulo II, se tiene la ecuación 2.12
2.116

9(S)
E»(S)(2-12)
+1)
FUJ
donde:
&(S) : Desplazamiento angular
E*(S) : Voltaje de armadura (señal de control)
Km : Constante de ganancia del motor
Tm : Constante de tiempo mecánica del motor.
NOTA: R* y J generalmente son pequeñas, pero no se
las puede despreciar.
Esta función de transferencia del motor equivale a
unir:
Ea(S) Km
rmS + 1
W ( S ) 1
S
e<s)
Fig. 2.54 Diagrama en bloques del motor DCcon control por armadura
Es decir, interesa el desplazamiento angular £(S)? y
no la velocidad angular W(S).
2.117
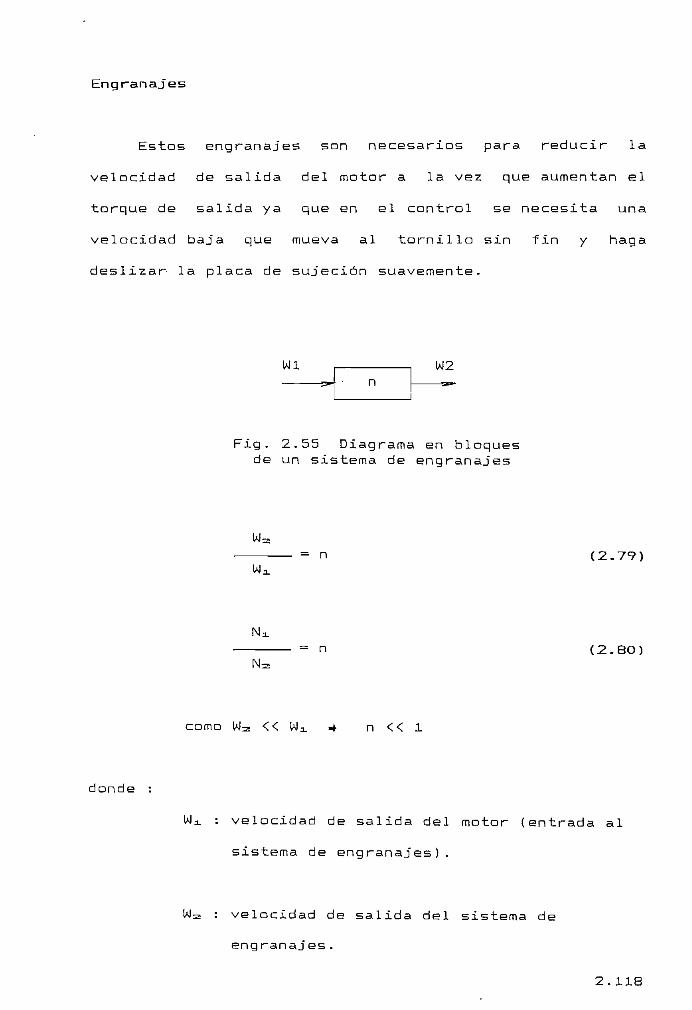
Engranajes
Estos engranajes son necesarios para reducir la
velocidad de salida del motor a la vez que aumentan el
torque de salida ya que en el control se necesita una
velocidad baja que mueva al tornillo sin fin y haga
deslizar la placa de sujeción suavemente.
Wl
Fíg. 2.55 Diagrama en bloquesde un sistema de engranajes
= n (2.79)
= n (2.80)
como Wra « Wa. 4 n « 1
donde :
Wx : velocidad de salida del motor (entrada al
sistema de engranajes).
W= : velocidad de salida del sistema de
engranajes.
2.118
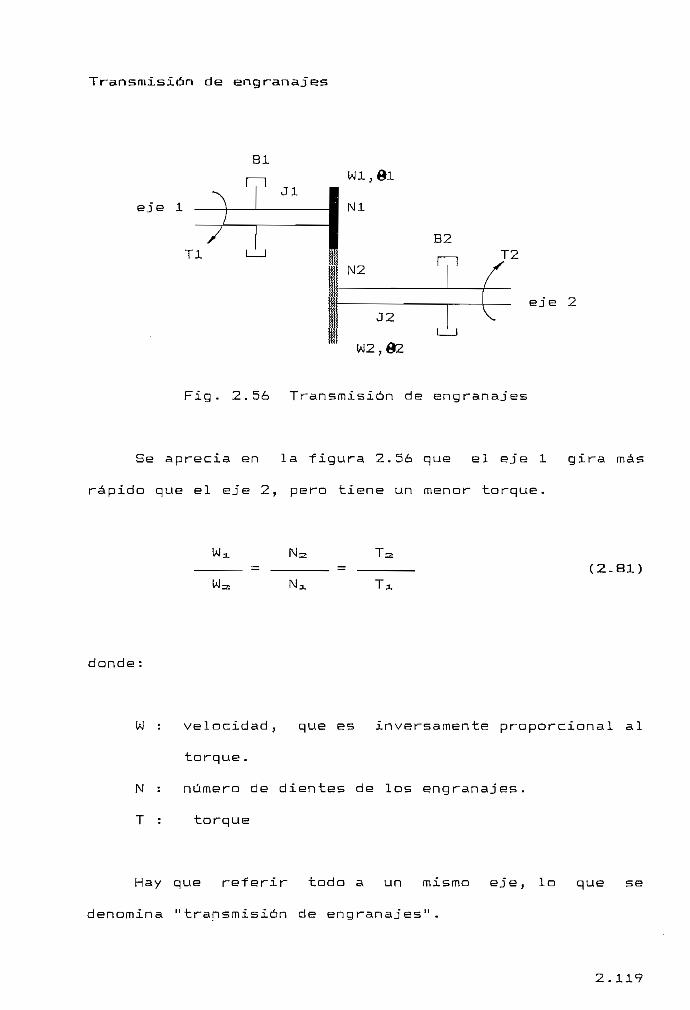
Transmisión de engranajes
Bl
eje 1Jl
TI I—l
NI
N2
B2T2
L eje 2J2 V
I 1"" W2 , 82
Fig. 2.56 Transmisión de engranajes
Se aprecia en la figura 2.56 que el eje 1 gira más
rápido que el eje 2, pero tiene un menor torque.
(2-S1)N: T;
donde:
W : velocidad, que es inversamente proporcional al
torque.
N : número de dientes de los engranajes.
T : torque
Hay que referir todo a un mismo eje, lo que se
denomina "transmisión de engranajes".
2.119

Tornillo / Desplazamiento de la Placa
Representa el desplazamiento de la planta de
sujeción con respecta al desplazamiento angular del
tornillo sin fin. En otras palabras, en este proceso se
transforma el desplazamiento angular en desplazamiento
lineal, donde a tantos grados (o vueltas) de giro del
tornillo le corresponde un valor de milímetros de
desplazamiento de la placa.
Fig . 2. 57 Diagrama en bloque delsistema torni1 lo—desplazamiento
de la placa.
la función de transferencia es:
(2.82)a
donde :
-i X : desplazamiento lineal de la placa [mm]
& : ángulo que gira el tornillo sin fin [ ° 3
n=2 : función de transferencia Cmm/grados]
Sensor de Presión
Este sensor proporciona la señal medida de realimen—
tación. Emplea un sistema tipo resorte acoplado a un
<¿fc2. 120
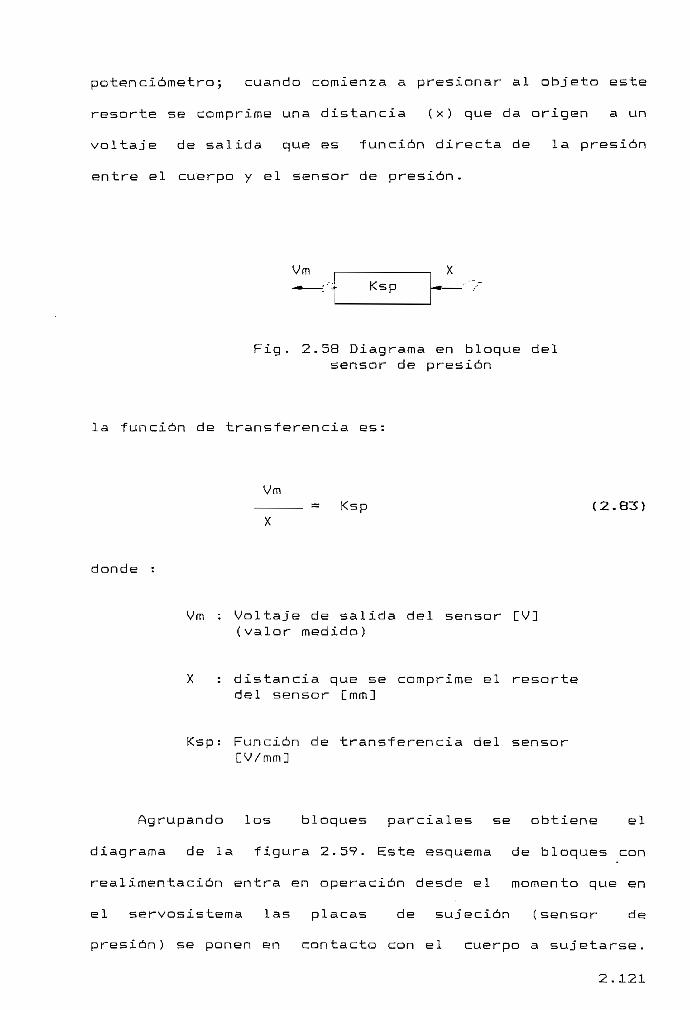
é
potenciómetro; cuando comienza a presionar al objeto este
resorte se comprime una distancia (x) que da origen a un
voltaje de salida que es función directa de la presión
entre el cuerpo y el sensor de presión.
VmKsp
Fig . 2.58 Diagrama en bloque delsensor de presión
la función de transferencia es:
= Ksp (2.83)
donde
Vm : Voltaje de salida del sensor CVD(valor medido)
X : distancia que se comprime el resortedel sensor [mm]
Ksp: Función de transferencia del sensorCV/mm]
Agrupando los bloques parciales se obtiene el
diagrama de la figura 2.59. Este esquema de bloques con
realimentación entra en operación desde el momento que en
el servosistema las placas de sujeción (sensor de
presión) se ponen en contacto con el cuerpo a sujetarse.
2.121

Todo el análisis desarrollado en este tema de tesis
en cuanto a control de servosistemas es vigente para esta
etapa. Antes de este Instante, se tiene un control de
lazo abierto, ya que no actúa la realimentaclon del valor
medido con el sensor de presión.
Vref +
engranajes tornillo/placa
niU2 1
S
0
Vref
Vm
K Km ni
S (rmS +1 )
X
Vref
Vm
KV
S (TmS +1 ).X
SP
KT'=K Km ni n2
Fig. 2.5? Diagrama de bloques total delservomecanismo "Control análogo de
presión Mecánica"
2. 122

Este esquema de bloques con realimentación entra en operación
desde el momento que en el servosistema las placas de sujeción
(sensor de presión) se ponen en contacto con el cuerpo a sujetarse.
Todo el análisis desarrollado en este tema de tesis en cuanto a
control de servosistemas es vigente para esta etapa. Antes de este
instante se tiene un control de lazo abierto ya que no actúa la
realimentación del valor medido con el sensor de presión.
Se tiene el control de lazo abierto desde el inicio hasta que
se ponen en contacto las placas y el cuerpo, durante este intervalo
SP está abierto. Actúa el control de lazo cerrado desde el contacto
del cuerpo con las placas de suj'eción hasta sostener el cuerpo. En
esta etapa SP se cierra siendo éste el obj'etívo principal de la
presente tesis. Es de notar que la inclusión del interruptor SP en el
lazo de control es teórica a fin de ayudar en el análisis del
diagrama de bloques.
Donde:
6 = (2.84)S(TmS + 1)
H = K.p (2.85)
Del análisis teórico de sistemas de control se sabe
que la función de transferencia total es:
GFT = (2.86)
1 + GH
2.123

denominada función de transferencia de laso cerrado,
donde el grado del polinomio del denominador (1 + GH),
indica el orden del servosistema, el mismo que influye en
la estabilidad del sistema.
Reemplazando las ecuaciones 2.84 y 2.85 en 2.86 se
obtiene :
KTFT - (2.87)
TmS2 + S +
El denominador es un polinomio de 2do. grado, conse-
cuentemente se trata de un sistema de "segundo orden".
El diagrama de bloques indicado en la figura 2.59 se
pasa a uno equivalente con realimentación unitaria con la
finalidad de hacer un análisis transitorio y de error en
estado estable. Este diagrama equivalente se muestra en
la figura 2,60.
Vref 1
Ksp -< E)— Ksp KT'
S(rmS +1)
X
Fig. 2.60 Diagrama de bloques conrealimentación unitaria
2.124

Tomando como referencia el lazo de realimentación se
tiene que en general:
K(Sn + 1) (ST2 -í- 1) ...G - (2.88)
-i-l) ...
donde N representa el tipo del sistema.
La ecuación anterior representa G(S) para un sistema
de realimentación unitaria. El tipo del sistema influye
en el análisis del error de estado estable3 entonces3
para el presente caso:
KT Kep> KTG = - (2.89)
S(TmS +1) S(TmS +1)
donde N ~ 1 . Consecuentemente el servomecanismo es de
1.
Conclusión: El servomecanismo "Control Análogo de
Presión Mecánica" que se construye es un
"Sistema de 2do . orden. Tipo 1"3 y el
error se analizará posteriormente.
Haciendo analogía con £, Wr* para estudiar la
respuesta transitoria se toma en cuenta el lazo cerrado.
2.125

Vref 1
Ksp-<
J)—
,
Wn2
S(S + 2ÍWn)X
Fig. 2.61 Diagrama de bloques conrealimentación unitaria
De la comparación de las figuras 2.60 y 2.61 se
tiene la equivalencia :
Kop.
S(TmS +1)
de lo que se obtiene:
KT
KT" =
Tm
Wn2
S(S + 2£Wn)
Km K ni n2
(2.90)
(2.91)
>* — (2.92)
La expresión 2,92 explica de otra manera la
reducción de velocidad en la tesis, ya que la reducción
de Wn, aumenta C3 y al aumentar el amortiguamiento el
sistema es más estable. r>ero más lento, conveniendo esto
en el caso en estudio ya que lentamente se puede
2.126

controlar de mejor manera la presión sobre el objeto a
sostenerse.
El valor referencial no influye en el lazo de
realimentación, ni en la función de transferencia del
sistema, de ahi que, si esta referencia es de orden
automática o manual no afecta en el análisis de la
función de transferencia; lo que si es de importancia
para analizar la respuesta es la forma que tiene la señal
referencial, que en este caso es una función escalón.
Estos análisis con la función de transferencia
sirven para sistemas lineales y estacionarios (de pará-
metros constantes). En el rango que sostiene pesos
mayores (fuera del rango máximo de salida del sensor de
presión) no se cumple el análisis de esta función de
transferencia, ya que nunca se iguala el valor medido con
el valor referencial (error diferente de cero) debido a
qué la salida del sensor de presión " (valor medido) está
en su máximo valor y éste es menor que el valor
referencial durante todo el proceso de ajuste, de ahi que
una vez que se considera sujeto el cuerpo hay que parar
exteriormente el servomecanismo; en caso contrario éste
seguirá apretando ocasionando daños en el cuerpo ó a su
vez quemando al motor. En este caso el servomecanismo
actúa como una especie de grúa que sujeta cuerpos (no
necesariamente con la presión mínima suficiente) a fin de
trasladar cuerpos de un lugar a otro.
2.127

2.4.2 Análisis de la Función de Transferencia
Se analiza el diagrama de bloques con realimentación
unitaria de la figura 2.62.
R(S) 1
Ksp %1
-> jEa
}' ^i
Wn2
S(S + 2CWn)C(S)
Fig. 2.62 Diagrama de bloques conrealimentación unitaria
Empleando las ecuaciones para wn y C se obtiene que
C > 1 (amortiguamiento > 1), como se demostrará en el
Capítulo VI donde se realiza el cálculo con datos reales.
Consecuentemente se trata de un sistema
sobreamortiguado y por esta razón la velocidad del
servomecanismo es lenta. Es decir el "sistema es más
lento pero más estable".
Análisis transitorio
Tomando como referencia de análisis el lazo cerrado
de realimentación unitaria, donde:
C(S)
R(S)(2.93)
2.128

La entrada de prueba es "escalón unitario"
(R"(S)~1/S). Nótese que para esto la entrada total R(S)
debe ser:
R(S) = Ksrp (2.94)S
R(S), es una entrada de función escalón no unitaria,
que en general coincide con el valor referencial que se
coloca en la entrada del servomecanismo; por lo tanto
tiene sentido el análisis que se indica a continuación.
La salida C(S) es :
C(S) = (2.95)
Como se esta estudiando el caso sobreamortiguado, ya
que C > lj (no hay oscilación), se tienen dos raices
reales distintas pi y PE (denominador de la función de
transferencia).
Pi = -Cwn - Wn V C2 - 1 (2.96)
+ Wn. V C2 - 1 (2.97)
Estas raices son reales, distintas y negativas; como
es de esperarse para un sistema sobreamortiguado.
Entonces el sistema es estable ya que los polos de la
2.129
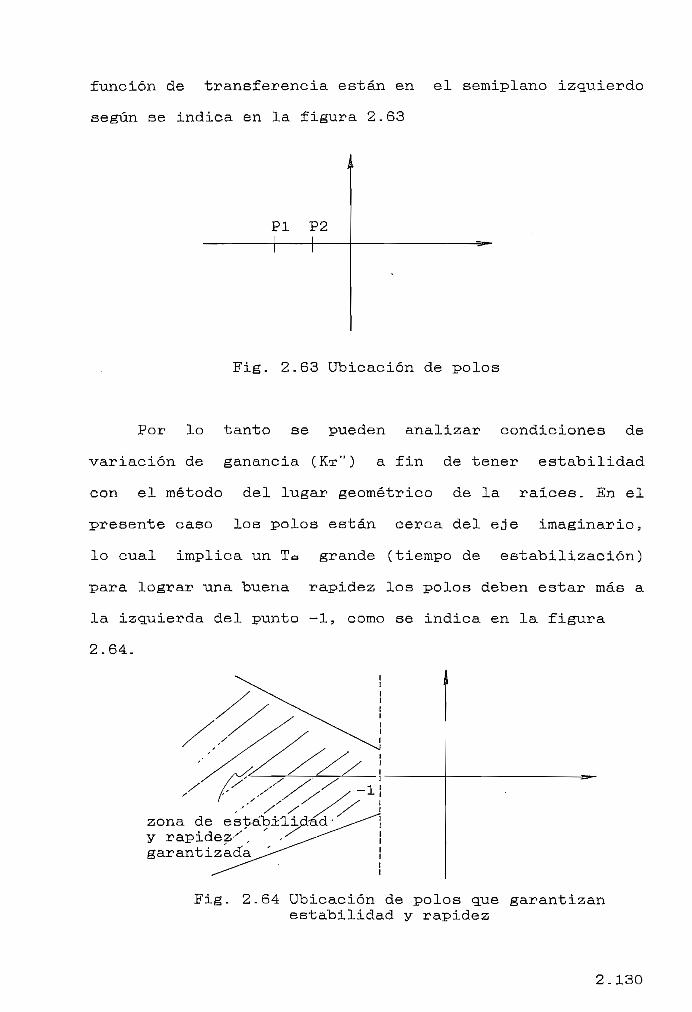
función de transferencia están en el semiplano izquierdo
según se indica en la figura 2.63
Pl P2
Fig. 2.63 Ubicación de polos
Por lo tanto se pueden analizar condiciones de
variación de ganancia (Ka:") a fin de tener estabilidad
con el método del lugar geométrico de la raices. En el
presente caso los polos están cerca del eje imaginario ,
lo cual implica un Te grande (tiempo de estabilización)
para lograr una buena rapidez los polos deben estar más a
la izquierda del punto -1, como se indica en la figura
2.64.
-1
zona de estóbiliptad'y rapidea-x, ' 'garantizada
Fig. 2.64 Ubicación de polos que garantizanestabilidad y rapidez
2.130

dado que:
C(S) =S(S~pi)(S-p2)
1 1 1- Ki + Ks + K3
S-pi
la respuesta del sistema tiene la forma:
(2.98)
c(t) ~ Ki K3 (2.99)
se tiene gue las constantes valen:
Kl -
Pipa(2.100)
Ka = -
P1P2 P2-P3.
(2.101)
KsP2-P1
(2.102)
Con la ayuda de estas expresiones y conociendo los
valores de £ y Wn se puede encontrar la expresión de la
respuesta del sistema, como se indica en el Capítulo VI,
esta respuesta se indica en ecuación 2.103 y figura 2.65
c(t) = (2.103)
para t = O, c(t) = O
2.131

para t — » , c(t) x 1 = K:
r(t) = K,
Fig. 2.65 Respuesta del servosistema"Control análoga de Presión Mecánica"
Esta es la respuesta del sistema para una entrada
R'(5) escalón unitario; en el caso real del servomeca-
nismo a .construirse la entrada es escalón no unitario,
pero en si la respuesta tiene la misma forma.
Cálculo de Definiciones Transitorias
Tiempo Pico Tr
TI
(2.104)
Como en el presente caso £ > 1 el sistema es
sobreamortiguado y consecuentemente no existe oscilación,
por lo tanto no se puede hablar de un tiempo de pico.
2.132

Sobre nivel porcentual
Por las mismas razones anteriores no existe sobre
nivel porcentual.
Tiempo de Estabilización T.
El tiempo de estabilización indica la duración del
transitorio, el mismo que depende del margen de error que
se acepte. Si se supone un porcentaje de error del 2 7.
del valor final como valor aceptable, para una entrada
escalón unitaria se tiene:
0-26 e-o.o^iet - 1.26 e"0-01-^* = -0.02 (2.1O5)
Resolviendo esta ecuación se obtiene T» . Los valores
reales se obtienen en el Capitulo VI.
Análisis para el caso en estudio
Como la entrada es una función paso (escalón) no
necesariamente unitaria, se tiene el diagrama de la
figura 2 . 66 .
2. 133

R' C S )R(S)
R(S)— KEM
S(S-ees)
R(S)-C(S)
Fig. 2.66 Diagrama de bloques paraentrada paso no unitaria
C(S) 1(2.106)
R(S)
C(S) - (2.107)
Siguiendo el mismo análisis anterior para entrada
escalón unitario, se tiene:
KENT'C ( S ) = (2.IOS)
+ 2CWr,5+ Wr,3 SCS-pi) CS-P=3)
2.134

C(S) B K
S-P=(2.109)
c(t) = K (2.110)
Resolviendo estas ecuaciones se obtiene:
(2.111)
(2.112)
(2.113)
donde:
Una vez encontradas estas constantes la respuesta del sistema
tiene la siguiente forma:
c ( t ) = KE
2. 135
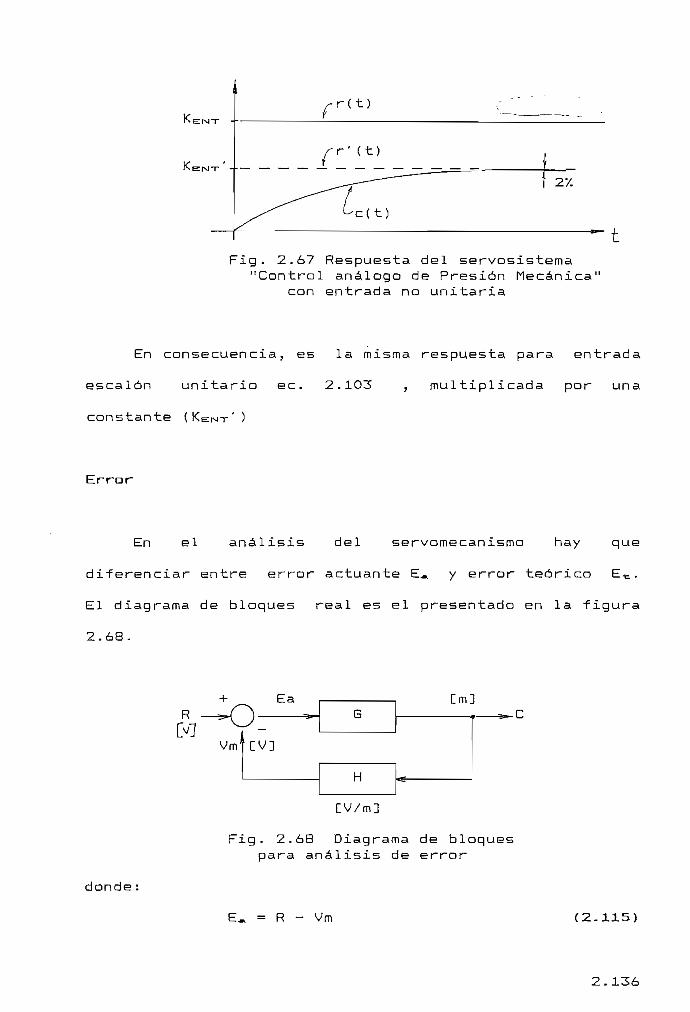
f r(t)
r' (t)
tFig. 2.67 Respuesta del servosistema
"Control análogo de Presión Mecánica"con entrada no unitaria
En consecuencia, es la misma respuesta para entrada
escalón unitario ec. 2.103 , multiplicada por una
constante (KENT')
Error
En el análisis del servomecanismo hay que
diferenciar entre error actuante E* y error teórico Et.
El diagrama de bloques real es el presentada en la figura
2. 08.
donde
R — 9-Trs >-i
(VI vLVJVm'
^J
C V ]
G
H
CV/m]
Fig. 2.68 Diagrama de bloquespara análisis de error
* = R - Vm (2.115)
2.136

E-r = R - C (2-116)
No es un sistema con realimentación unitaria, por lo
tanto existe una diferencia entre E* y Et C solamente para
realimentación unitaria E» = Et )? inclusive dimensio-
nal mente son diferentes; lo que no sucede con el E*, que
s¿ tiende a reducirse a un valor mínimo (teóricamente
cero).
En consecuencia el análisis de error será aplicada a
la transformación con real imantación unitaria indicada en
la figura 2.62, donde se cumple también el análisis
dimensional , en cuyo caso si se tiene que hablar de E,, y
E-e, además de ser iguales, entonces se encontrará el
error en estado estable E. .
En el caso de la realimentación unitaria:
GH = (2-117)B(S + 2£Wn)
Entonces se está en sistema tipo 1, y para entrada
escalón unitario el error es igual a cero.
Demostración:
e, = lim e(t) (2-118)
can : e(t) = r'(t) - c(t)
2.137

con la Transformada de Laplace
e. = lim í S E(B)} (2.12O)
E(S) = R'(S) ~ C(S) (2.121)
ECS)S S( S=
(2.122)
e = lim j S (t-»-co 5-*-O ' S S( +
)(2.123)
r' (t)
C(t)
e(t)
Fig. 2.69 Error actuante e(t)
2.138
e = 1 - = O (2-124)
Este error corresponde al error actuante en la
figura 2.62; y se representa en la figura 2.69.
NOTA: para entrada escalón no unitaria, se tiene el mismo
error ep = O, es decir que para tiempos grandes el error
actuante vale cero lo cual es lógico ya que en este
instante el valor medido iguala al referencial, calcu-
lando para este caso y con igual procedimiento al
anterior tenemos:
e, = lim { S E(S) >s-*o
E(S) - RCB) - 'C(S)
E(S) = - (2.125)
KEM-T 'e» = lim S . . (2.126)
s-3-o
e» = KEN-r'|l ~ 1= O (2.127)
2.139

Ya en el caso real la referencia es escalón no
unitaria y además, ésta debe tener un incremento A por
zona muerta que existe en todo servomecanismo ya que
antes que E« sea cero ya se paraliza el sistema, entonces
se tiene la representación gráfica de la figura 2.70
r' (t)4.8 *
AMUERTO3.8S4
e(t)J
4.8-
3.8
-t— t
FIg. 2.70 Gráficos de error Incluyendola ZONA MUERTA del servomecanismo
"Control Análogo de Presión Mecánica"
donde al aplicar las ecuaciones 2.125—2.126—2.127, se
tiene:
4.8E(S) =
2.140
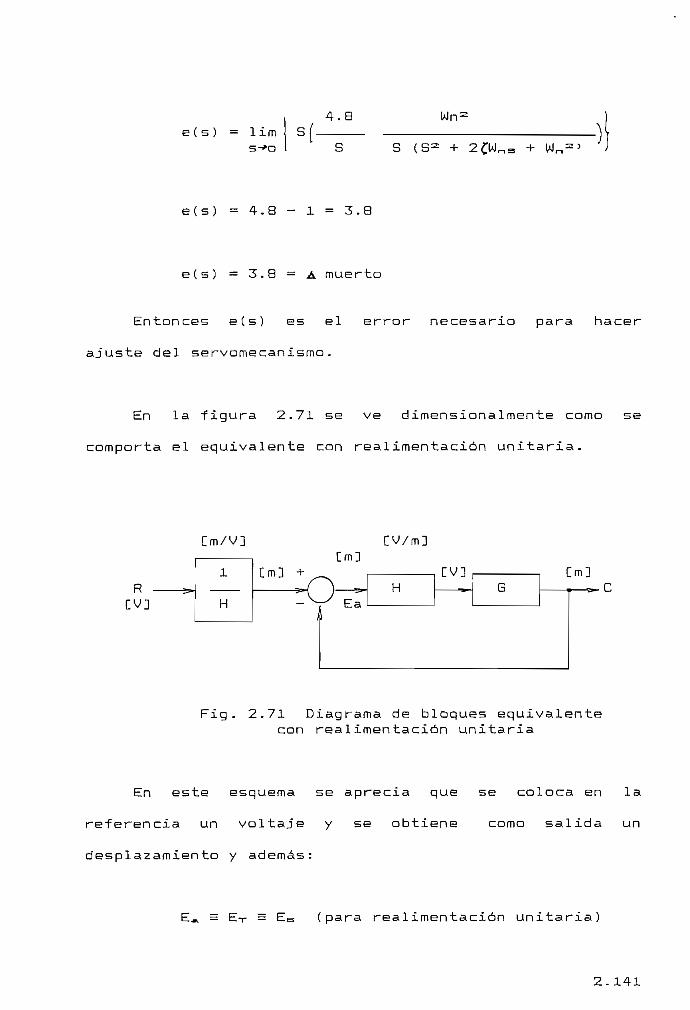
= lim4.B
e(s) = 4.8 - 1 = 3.8
e(s) = 3.B = A muerta
Entonces e(s) es el errar necesario para hacer
ajuste del servomecanismo.
En la figura 2.71 se ve dimensionalmente como se
comporta el equivalente con realimentación unitaria.
[m/v1] CV/m]C m ]
C m ]
Fig. 2.71 Diagrama de bloques equivalentecon realimentación unitaria
En este esquema se aprecia que se coloca en la
referencia un voltaje y se obtiene como salida un
desplazamiento y además:
* = E-r = Es (para realimentación unitaria)
2.141

también :
Para entrada función paso : R'(S) = 1/S (entrada de
posición) se define:
S R(S)e, = lim (2.128)
s-o 1 + S(S)
S 1/S 1 1e» = lirn = lim =
1 + 6(S) s-o 1 + G(S) 1+6(0)
KP = G(0) constante de posición (2.129)
KR = lim G(S) = G(0) (2.130)
= lim (2.131)s-o S(S +
por tanto : Kp
1e. = 4 em —^ O (2.132)
1 + Ko
2.142
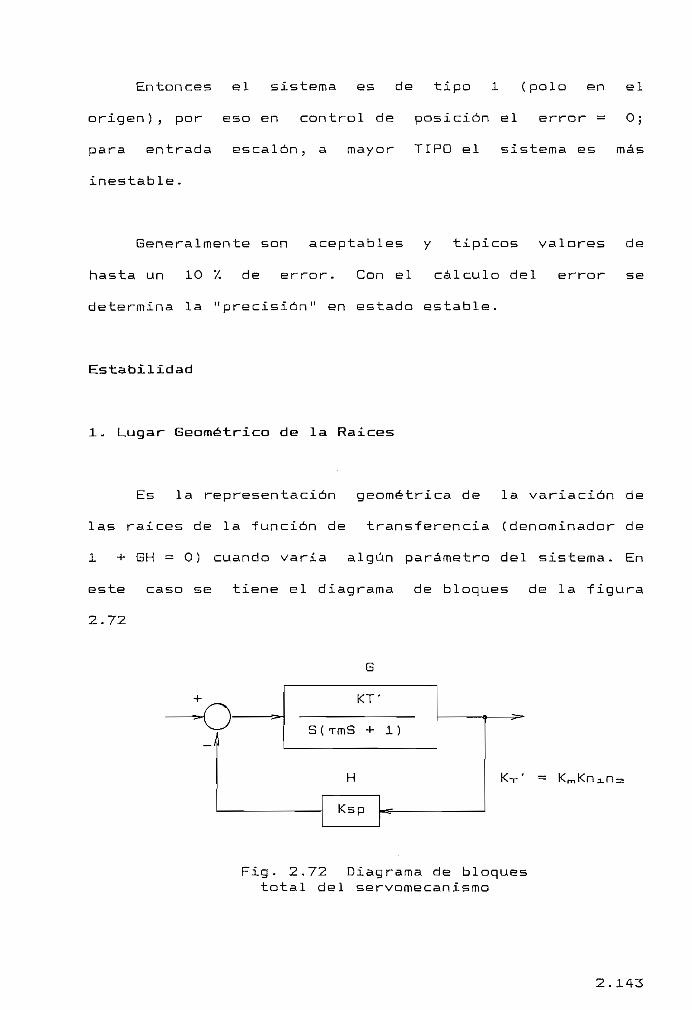
Entonces el sistema es de tipo 1 (polo en el
origen) , por eso en control de posición el error = 05
para entrada escalón, a mayor TIPO el sistema es más
inestable.
Generalmente son aceptables y típicos valores de
hasta un 107. de error. Con el cálculo del error se
determina la "precisión" en estado estable.
Estabilidad
1. Lugar Geométrico de la Raices
Es la representación geométrica de la variación de
las raices de la función de transferencia (denominador de
1 + GH = O) cuando varia algún parámetro del sistema. En
este caso se tiene el diagrama de bloques de la figura
2.72
G
1
KT
S( rmS +
H
Ksp
1)
KT
Fig. 2.72 Diagrama de bloquestotal del servomecanismo
2.143

K-r' K-r'K.p K-r" (2.133)GH = K.p = =
S(rmS + 1) S(TmS + 1) S(TmB + 1)
donde : n* — O2 ramas del lugar geométrico yterminan en el infinito
np = O
« O
Puntos de separación del eje real
Se resuelve la ecuación :
s + P± — s + Zí
S + l/T
= O
1
S + + S - O
de donde:
(2.134)
1S = _ (2.135)
2. 144

2Tr
Fig. 2.73 Puntos de cortecon el eje real
Puntas de corte con el eje imaginario
La ecuación característica se iguala a O
i + GH = O (2.136)
donde.
S(TmS= O
K = K-r' . K
1 K3= + S -t- . = O
1
l/Tr
K / T r
O
donde : y a^ = O
2. 145

Para que exista estabilidad los elementos de la
primera columna deben tener el mismo signo.
ai = K/Tm > O,
como: Tm > O, se concluye que K > O.
Para cualquier K > O el sistema es estable, es decir
todas sus raíces están en el semiplano izquierda.
O < K < 03
no existe corte con el eje imaginario.
Puntos de corte de las asíntotas.
(2.138)- n:
(2.139)2r
que coincide can los puntas de separación de las ramas.
(2q+l)180° (2q+l)180°$ = = (2.140)
de donde se tienen los valores de $: 90°, 270° y 450'
2.146

-1/rm
K=0
-1/2-rm
K=0
FIg. 2.74 Lugar Geométrico de las Raices
En conclusión, el sistema es estable para cualquier
valor de K mayor que O, siendo K = K-r- K«p.
>K Para que las raices sean iguales se debe cumplir
que
K = (2.141)4rr
Para este valor de K las raices son reales e
Iguales, entonces para las ganancias comprendidas entre:
O < (< < l/4rm
se tienen raices reales distintas y es el caso del
sistema en estudio 7 como se verá en el Capitulo VI.
>K Cuando K = O, se tienen los valares:
So. = O
l/Tr
(2.142)
(2.143)
2.147

* Cálculo del valor de k para que el punta S forme 45'
con el eje real figura 2.75 :
-l/2Tm
\5
\r
Fig. 2.75 Lugar Geométrico para queS forme un ángulo de 45°
1 - 1-4- j
1 1
j .
Para:
K =2rr
los puntos Si y s= están a 45 grados.
* Para el rango:
l/4Tm < K < l/2Tm
las raíces son conjugadas y distintas, formando un ángulo
menor que 45°.
2.148

Como se vio anteriormente (ec. 2 .90)
Wr
el aumento de la ganancia K-r" implica un aumenta de la
frecuencia wn.
Por otra parte, por la relación ec. 2.92 :
1
c =
el aumento de Wn involucra una disminución del amortigua-
miento, por lo que el sistema se vuelve oscilatorio.
En el Capitula VI se realizará un análisis con datos
numéricos reales medidas con el servomecanismo
construido.
2. 149

CAPITULO III
SENSORES - TRAN5DUCTDRES
3.1 SENSORES, ACONDICIONADORES, TRANSDUCTORES
3.2 SENSORES DE PRESIÓN MECÁNICA Y FUERZA
3.3 SENSORES ESPECIALES
3.4 TIPO DE TRANSDUCTOR QUE SE EMPLEA

CAPITULO III
SENSORES - TRANSDÜCTORES
3.1 SENSORES, ACONDICIONADORES, TRANSDÜCXORES
3.1.1 SENSOR
Es un aparato que detecta, mide o graba la presencia
de fenómenos de radiación, electricidad, magnitudesy
etc., como por ejemplo:
Radiación
Electricidad
Magnitudes
emisiónabsorciónrefracción
potenciavoltajecorriente
masavolumentemperatura, etc.
La señal medida no solamente se la -utiliza para in-
dicadores (display) sino gue también sirve para controlar
el funcionamiento de servomecanismos, siendo este campo
muy amplio e importante y es precisamente ésta la
aplicación que se les da a los sensores en la
construcción del servomecanismo de control de presión
mecánica implantado en el presente trabajo.
El sensor constituye el elemento primario sobre el
cual actúa directamente la variable a medirse. El sensor
transforma la clase de magnitud del fenómeno detectado en
otra clase adecuada de magnitud. Generalmente los
sensores producen señales analógicas <aue necesitan
acondicionamiento, asi por ejemplo, un sensor de luz
detecta la luz y transforma ésta a corriente ó voltaje.
3.1.2 ACONDICIONADOR
La señal eléctrica proveniente del sensor es trans-
mitida al acondicionador de señal, el cual tiene como
función primordial modificar la señal, ya sea para
indicar en un display o para convertir las señales a fin
de que se puedan intercalar con otros elementos del
proceso de control y realizar acciones de control en
servomecanismos (en nuestro caso la señal modificada es
amplificada y aplicada directamente al servomotor).
3.2

El acondicionamiento de la señal puede consistir en:
- linealización
- amplificación
- diferenciación
- suma
- resta
— acoplamiento de impedancias
— filtrado
- estandarización
- atenuación
- limitación
- regulación
Los acondicionadores pueden ser analógicos o
digitales.
Acondicionadores Analógicos
En control analógico la salida acondicionada es una
representación análoga de la variable dinámica. Aún en
los procesos digitales se requiere acondicionamiento
analógico antes de realisar una conversión análoga-
digital.
3.3

Tipos de acondicionamiento
— Cambio de nivel
Es el más simple; cambiando el nivel de "una señal ya
sea ampliando o atenuando el voltaj e. Es importante
anotar que para este efecto se emplean amplificadores,
los cuales deben tener una alta impedancia de entrada y
baja impedancia de salida. Además, en ciertas
aplicaciones es importante la respuesta de frecuencia.
— Linealización
La no proporcionalidad entre las variables de
entrada y salida puede causar problemas cuando se
requiere mediciones precisas de la variable dinámica.
Para este efecto se emplea la linealización, asi por
ejemplo se tiene el caso de la linealización de
característica exponencial.
— Conversiones
Estos acondicionadores se emplean para convertir un
tipo de variable eléctrica en otra. Como ejemplo tenemos
el caso en el cual la variable dinámica origina un cambio
en la resistencia, y se emplean circuitos para convertir
esta variación de resistencia en señales de voltaje o
corriente. Para ello se emplea circuitos puente (para
3.4

cambios fracciónales) o amplificadores cuya ganancia
varia con la resistencia.
- Filtrado e Impedancia
En algunos sistemas de control se produce o
introduce ruido (incluso con el arranque de motores)
generando frecuencias indeseables que ocasionan fallas en
el sistema de control; para evitar este problema se
emplean filtros pasa altosy pasa bajos o elimina bandas.
Estos filtros pueden a su vez ser activos o pasivos:
Los acoplamientos de impedancias son muy importantes
ya que la impedancia interna de los sensores puede causar
errores en la medición de variables dinámicas.
De manera similar, los acondicionadores
analógicos pueden ser pasivos o activos:
Acondicionadores analógicos pasivos.
circuitos puente -«-»- miden cambios deimpedancia pequeños
Pasivospotenciómetros —z_ - para efectuar
mediciones de voltajecon gran precisión
3.5

Circuitos Puente
Aplicados en la medición de resistencias.,
inductancias y capacitancias, ya sea en condiciones
transitorias o de estado permanente. La estructura más
conocida es el puente de Wheastone.
— Puente de Wheastone
Empleado para comparar y medir resistencias en un
rango de 1Q a 1 MQ.
R2
Rl -> variableRx => resistencia
desconocida
Fig. 3.1 Puente de Wheastone
En la fig. 3.1 hay que tratar de equilibrar el
potencial entre los puntos B y D variando Rl (esto
ocurrirá cuando la corriente por el galvanómetro sea
igual a cero).
3.6

Rz Ri• — • v« - -L y
Rs Rx
De donde podemos determinar el valor de ~Rx9
conociendo los valores de Rl, RE y Rs.
Generalmente el galvanómetro se conecta a la unión
de dos resistencias conocidas. Hay que tener cuidado de
utilizar alambres cuya resistencia sea pequeña comparada
con el valor de resistencia que se desea conocer.
También se utiliza para medición de impedancias en
C.A. Tomando en cuenta que para lograr el balance hay
que satisfacer: .
- equilibrio de la parte real de la onda
- equilibrio de"la parte imaginaria
Esto se puede lograr con dos ajustes diferentes,
como se indica en el anexo A.3.1.
En lugar del galvanómetro empleado en D.C. para
detectar equilibrio, en C.A. se debe emplear un
instrumento de C.A., asi por ejemplo voltímetro de vacio,
osciloscopio, medidor tipo rectificador, etc. Algunos de
estos puentes tienen su balance independiente de la
frecuencia mientras que otros necesitan este valor para
aplicar condiciones de balance.
3.7

El puente de D.C. es empleado para medir:
- resistencias de varios transductores como
termómetros de resistencia.
- extensiómetros eléctricos
Es decir aquellos aparatos que registran cambios de
una variable física a través de cambios de su
resistencia.
Acondicionadores Analógicos Activos
Emplean mucho los amplificadores operacionales3
entre los que podemos citar:
- Seguidor de Voltaje: acoplar impedancias
- Amplificadores: para variar el nivel de la señal
- Amplificador Diferencial: detecta desbalance
empleando un circuito puente, o amplifica señales
muy débiles.
- Amplificador logarítmico : linealiza las
características de ciertos sensores no-lineales.
Las señales medidas generalmente son débiles en
muchos casos, por lo cual deben amplificarse a fin de
poder utilizarlas en un aparato de medida o como señales
de control. Puede también existir desacoplamiento entre
el transductor y el circuito de salida, entonces se
3.8

emplea un amplificador para proporcionar conversión
apropiada de impedancias. Es decir, se utiliza una etapa
de amplificación para transformar una señal proveniente
de un circuito de alta impedancia a una señal de baja
impedancia. Se los denomina amplificadores
transformadores de impedancia.
<£-Algunos de estos circuitos se indican en el anexo
A.3.2.
Acondicionadores Digitales
La señal codificada digitalmente por tener dos
¿j£ niveles (alto o bajo), es menos sensible a influencias
del ruido eléctrico, variaciones de las características
de los amplificadores operacionales, efectos de
acoplamiento, etc. Además permite el uso de computadores
en procesos industriales
3.1.3 TRANSDOCTOR
*Se denomina transductor al conjunto formado por el
sensor y el acondicionador.
TRANSDUCTOR = SENSOR + ACONDICIONADOR DE SEKAL
De ahí que en forma global se convierte las señales
provenientes del sensor en una magnitud proporcional a la
-#3.9

variable dinámica (con ayuda del acondicionador) a fin de
poder usar esta información con los otros elementos de
control.
El transductor eléctrico transforma una variable
física, gue es la entrada, en una señal eléctrica de
^ salida. Los transductores se pueden emplear paraíSr
medición en instrumentación y como elemento esencial en
la realimentación de servomecanismos (control de lazo
cerrado).
El transductor es un aparato que convierte una forma
de energía o cantidad física en otra, es decir transforma
J£ una magnitud física de una clase a otra diferente, donde
su salida se relaciona con la entrada bajo cierta regla
(proporcional a la entrada, proporcional al cuadrado,
etc.) que se cumple en cierto rango de operación del
transductor (Ej. zona lineal).
Como ejemplo se puede señalar el caso de un
rl potenciómetros el cual es un transductor que convierte
una posición mecánica (lineal o angular) en una señal
eléctrica. El dispositivo que modifica características
del mismo tipo de magnitud física no se llama transductor
(Ej. un amplificador electrónico).
Kl principio básico de la transducción es "conservar
energía" en el proceso. Algunos transductores extraen
¿*3.10

energía del objeto medido (sensado), en cuyo caso el
proceso de transducción cambia no solamente la cantidad a
ser medida, sino que también puede alterar el proceso en
sí, razón por la cual son considerados malos.
Entonces para realizar mediciones válidas que no
interfieran en el proceso la regla es muy sencilla:
emplear o seleccionar transductores que accionen
directamente en el movimiento de la variable a medir.
CLASIFICACIÓN PE SENSORES Y TRANSPCJCTORES
4 Generalmente se clasifican de acuerdo a la variable
que es medida, su tipo de estructura, tipo de elemento
sensor y comportamiento. Estructuralmente los sensores
pueden ser:
- mecánicos
- magnéticos
¿i. - ÓptiCOS
— químicos
- térmicos
- atómicos
— combinaciones de los anteriores
A manera de ejemplo tenemos:
3.11

Sensores mecánicos Sensores ó-pticos
— potenciómetro
- LVDT
- reluctancia variable
- inductivos
- capacitivos
- piezoeléctricos
- galgas extensiométricas
- foto-tubos
- foto-diodos
- foto-transistores
- celda fotoconductora
- celda fotovoltaica
Sensores del Medioambiente
Los sensores del cuerpo humano son sensibles a todas
las entradas del medioambiente:
- presión
- fuerza
- tensión (esfuerzo)
- sonido
- temperatura
- radiación
- campo eléctrico
- campo magnético, etc
como:
Los transductores miden parámetros físicos tales
- fuerza y esfuerzo
- desplazamiento
3.12
- proximidad
- medida de espesor
- presión
- caudal
- nivel de líquidos
- vibraciones7 etc.
Básicamente se tiene dos amplios tipos:
transductores activos y transductores pasivos.
Transductores activos.— Aquellos que generan un voltaje o
corriente como resultado de variaciones en la señal
física de entrada al sensor. Como ejemplo se tiene el
caso de una termocupla, dispositivo que genera una señal
eléctrica proporcional a la variación de la temperatura
aplicada.
Transductores pasivos.— Cambian sus propiedades cuando se
les suministra variaciones en la entrada. Como ejemplo se
puede señalar a los foto-transistores, los cuales cambian
su resistencia al exponerse a la energía luminosa.
Existen otros transductores especiales que combinan
los elementos activos y pasivos. Así, los transductores
electrocinéticos que operan con un fluido polar contenido
entre dos diafragmas que cambian la diferencia de
potencial entre las placas.
3.13
Entre los transductores pasivos tenemos aquellos que
responden con movimientos mecánicos a la acción de fuerza
o presión, causando cambios eléctricos.
Como ejemplos se tiene:
- elemento capacitivo<j&
- elemento inductivo
- elemento potenciométrico, etc.
Los transductores activos generan voltaje o
corriente como resultado de la aplicación de energía o
fuerza en su entrada. Entre estos métodos de generación
¿je se tiene:
- electrostático - fotoeléctrico
- químico - piezoeléctrico
- electromecánico - termoeléctrico
Elemento electromecánico.— Por ejemplo el movimiento de
un conductor a través de un campo magnético. Se genera de
esta manera una diferencia de potencial. (ley de
inducción de Faraday).
Elemento fotoeléctrico.— Por ejemplo los casos de la
fotoemisión y acción fotovoltaica.
3.14
Elemento -termoeléctrico.— Existen tres efectos
termoeléctricos en la generación de electricidad por
efecto de la temperatura.
1. Efecto SEEBECK
2. Efecto PELTIER
3. Efecto FARADAY
ejemplo la termocupla
inverso a la termocupla
la resistencia de ciertos materiales
decrece con el incremento de la
temperatura, es decir, tienen un
coeficiente de temperatura negativo.
Calibración de transductores
La calibración de los transductores frecuentemente
se la realiza con la comparación de un transductor
referencial,
Estructuralmente hablandoy la calibración es la
prueba del comportamiento de la función de transferencia
al realizar variaciones del medio ambiente.
Exactitud, precisión
En los procesos de transducción generalmente puede
existir distorsión, retraso y deformación de la señal a
ser procesada en la transducción. La distorsión puede
ser causada por:
3.15
no linealidades
histéresis
resonancia
efectos del medio ambiente
ruido (ej. ruido electrónico añadido
durante la amplificación)
3.2 SENSORES (TRANSDUCTORES) DE PRESIÓN MECÁNICA Y
FUERZA
Los diferentes sensores (transductores) que se
explican a continuación se pueden emplear indistintamente
ya sea como sensores de presión mecánica o de fuerza,
esto debido a que su forma o principio de operación
permite detectar cualquiera de los dos fenómenos. En el
caso de la presente tesis, los sensores necesarios 3 uno
para determinar el peso del cuerpo (sensor de fuerza) y
otro para determinar la presión que se va ejerciendo
sobre el cuerpo a sostenerse (como se verá en el numeral
3,4) son sensores iguales (del mismo tipo).
Por la razón expuesta se los explicará en conjunto y
dependiendo de cual sea la aplicación se acondicionará
(mecánica-eléctricamente) a fin de que se sense presión o
fuerza. Entre los sensores más importantes y de mayor uso
se puede citar:
3.16

Transductores de movimiento mecánico
- LVDT
- Potenciómetro
- Sincro
— Capacitivo
- Inductivo
Transductores piezoeléctricos
Transductores elásticos
- resorte
- barra
Extensómetros eléctricos (strain-gage)
Fotodeteccción
- fotodiodo
- fotoconductor
- celda fotovoltaica
3-2.1 Sensor de movimiento mecánico
Se estudiarán solamente los más importantes: LVDT,
potenciométrico, capacitivo, inductivo, vibración de
alambre y oscilador, Estos transductores mecánicos
3.17
originan un valor en la salida como función de un
movimiento físico de uno de sus componentes (sobre el
cual actúa la fuerza o presión a medirse).
LVDT Transformador Diferencial Lineal Variable
v Su principio de funcionamiento se basa en la
inducción mutua; tiene propiedades semejantes a las del
transductor inductivo. Se tiene dos tipos de LVDT:
a) De bobina móvil
Consiste de un devanado primario doble y un solo
secundario, pero sin núcleo de hierro.
b) De núcleo móvil
Es el más usado, básicamente está formado por un
arrollamiento primario, doble arrollamiento secundario
(conectados en oposición-serie) y un núcleo móvil. Se
produce una señal eléctrica en la salida que es
proporcional al desplazamiento lineal del núcleo o
armadura. Son energizados en el bobinado primario con
voltaje A.C. Las tres bobinas que lo conforman están
linealmente dispuestas, con su núcleo magnético móvil
dentro de las bobinas según se indica en la fig- 3.2
3.18
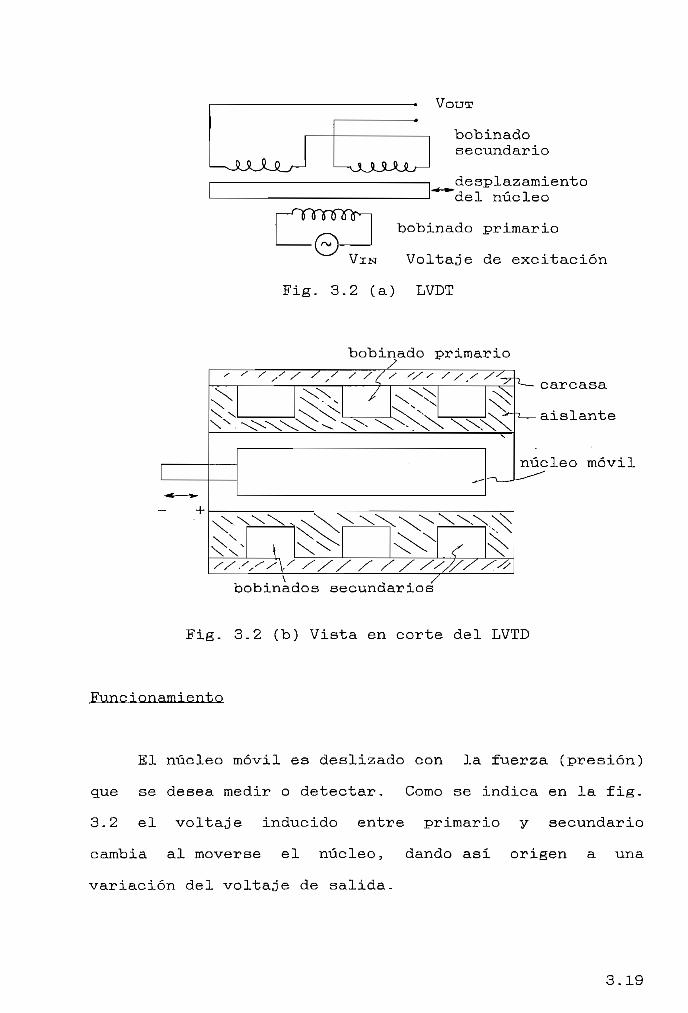
VoUT
bobinadosecundario
desplazamiento"del núcleo
bobinado primario
Voltao e de excitación
Fig. 3.2 (a) LVDT
bobinado primario
carcasa
aislante
núcleo móvil
bobinados secundarios
Fig. 3.2 (b) Vista en corte del LVTD
Funcionamiento
El núcleo móvil es deslizado con la fuerza (presión)
se desea medir o detectar. Como se indica en la fig.
3 . 2 el voltaj e inducido entre primario y secundario
cambia al moverse el núcleo, dando asi origen a una
variación del voltaj e de salida .
3.19

íH
'/,
[VOUT — O
(a) núcleo centrado
VOUT =)= O
(b) núcleo desplazado
Fig. 3.3 Distribución del flujo magnéticoen LVDT al moverse el núcleo
En la fig. 3.3, cuando la armadura está centrada se
induce un voltaje de igual magnitud en los secundarios,
como están conectados en oposición, la salida es cero.
Al desplazarse el núcleo de la posición central la salida
difiere de cero y su polaridad depende del sentido de
deslizamiento del núcleo.
Se obtiene voltaje de salida positivo o negativo (al
realizar la rectificación) en función del desplazamiento
del núcleo. La salida será aproximadamente lineal cuando
el núcleo se desplace en zonas cercanas a la posición
central. Cuando la operación está dentro del rango lineal
se denomina Transformador Diferencial Lineal Variable;
muy cerca de la posición central se tiene un ligero
comportamiento no lineal, existiendo un desfasamiento de
180° entre uno y otro lado de la posición central.
3.20

VoUT
Posicióndel núcleo
Fig. 3.4 VOUT de salida del LVDT en funciónde la posición del núcleo.
Características
- La frecuencia del voltaje de referencia suministrado
debe ser al rededor de 10 veces la frecuencia de la
respuesta deseada,
- Convierte el desplazamiento del núcleo a voltaje.
- Rango de entrada: ±0.005 a ±3 pulgadas.
- Sensa fuerzas desde 0.1 a 0.3 grf. (dependiendo del
tamaño).
- Sensibilidad de entrada: O.5% del rango total de
entrada.
- Las influencias de la temperatura se eliminan empleando
termistores.
- Impedancia de salida entre baja y mediana.
- Se debe tener cuidado de eliminar los campos magnéticos
parásitos. ~—-^
- Son manejados con C,A. de 50 a 60 Hz. Para 8-10 KHz se
tiene sensores de tamaño reducido.
3.21

- El LVDT es susceptible a la vibración, aunque
actualmente su construcción especial elimina este
problema.
Venta j as
*Tiene algunas ventajas sobre otros transductores de
movimiento mecánico. Entre las principales se puede
señalar :
1 . No existe fricción o histéresis ya que no se
presentan contactos mecánicos con la armadura y los
bobinados .
2. Como no hay rozamiento mecánico tiene una vida
virtualmente indefinida .
3. La salida es lineal, lo cual asegura una medición
exacta con instrumentos de lectura directa.
4. Resolución infinita, limitada solo por la lectura de
salida y equipos de control.
5 . Aislamiento eléctrico completo entre la entrada y
salida, permitiendo la adición y substracción de
señales con ayuda de amplificadores.
3.22

6. Su alto nivel de salida simplifica la circ-uitería de
acondicionamiento.
7. Absolutamente lineal entre cero y full escala.
Sensibilidad
éPara frecuencias altas la sensibilidad es
independiente de los cambios de temperatura.
Para frecuencias bajas de excitación (60 Hz.) la
sensibilidad cambia con la temperatura. Es sencillo,
resistente y de alto nivel de respuesta.
¿Transductor de resistencia variable
Denominado también potenciómetro o reóstato. El
transductor potenciométrico es un aparato electromecánico
que está constituido por un elemento resistivo con un
terminal móvil, el cual es accionado o movido con la
¿fc- fuerza a ser medida.
Se construye con un contacto que se mueve sobre un
alambre, o sobre una bobina de alambre con movimiento
lineal o angular. Su costo estará en función de su
precisión y calidad. Este transductor de resistencia
variable convierte un desplazamiento lineal o angular en
una señal eléctrica. Sin embargo, por medio del uso de
43.23
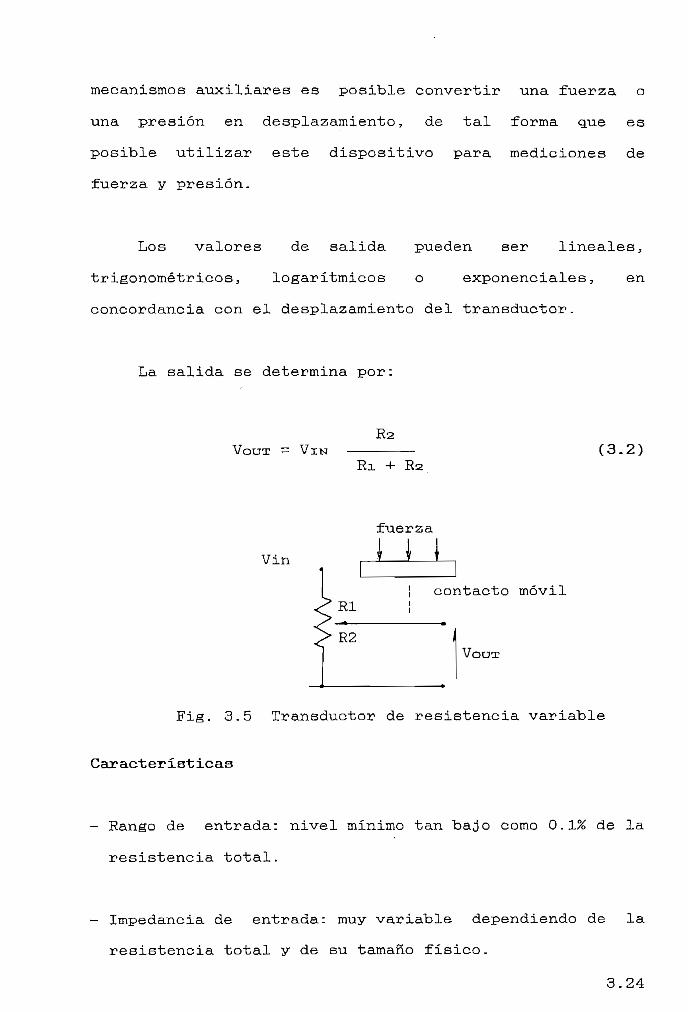
mecanismos auxiliares es posible convertir una fuerza o
una presión en desplazamiento, de tal forma que es
posible utilizar este dispositivo para mediciones de
fuerza y presión.
Los valores de salida pueden ser lineales,
^ trigonométricos, logarítmicos o exponenciales, enA
concordancia con el desplazamiento del transductor.
La salida se determina por:
RsVOUT - VIN (3.2)
Ri + Rs
Vin
! contacto móvilRl !
R2
Fig. 3.5 Transductor de resistencia variable
Características
- Rango de entrada: nivel mínimo tan bajo como 0.1% de la
resistencia total.
— Impedancia de entrada: muy variable dependiendo de la
resistencia total y de su tamaño físico,
3.24
- Sensibilidad de entrada: sensibilidad menor que 0.002
plg. a 0.2 plg. en medición angular.
- Error: desviaciones por no linealidad en el orden del
5% de la resistencia total.
-j, - Existen características mecánicas típicas como:
torque
recorrido
resistencia de contacto
Todo esto determina su eficiencia y valor.
- Linealidad: es la máxima desviación de la curva formada
¿f- entre el desplazamiento y su valor de resistencia de
salida. Entre los factores que determinan la linealidad
se tiene:
resolución del elemento
linealidad del alambre
- Ruido: ruido o señal eléctrica que distorsiona o
-£ interfiere con la salida eléctrica deseada. Puede ser
causado por defectos en los terminales, partículas
externas, oxidación del elemento, etc. El ruido
equivalente de una resistencia expresado en ohmios es
la resistencia efectiva entre el contacto deslizante y
la resistencia del elemento. Una prueba del ruido
equivalente en una resistencia consiste en hacer pasar
una corriente constante a través del circuito del
3.25
contacto deslizante. El ruido aparece como un voltaje
casual que es amplificado y visualizado en un
osciloscopio . Conforme va enve j eciendo el elemento
desarrolla un alto ruido y tiene una baja respuesta de
frecuencia.
Rango de temperatura de operación: es el rango entre
máxima y mínima temperatura en el cual puede operar el
potenciómetro sin que se produzcan daños o fallas en el
elemento .
Potencia: máxima potencia que puede disipar el
potenciómetro sin que se produzcan daños debido a
excesivos incrementos de temperatura.
Resolución: generalmente expresada para potenciómetros
de alambre .
1Resolución (%) = - x 100 (3.3)
N
Donde N es el número de espiras del alambre.
Un potenciómetro de film o slide-wire tiene una
resolución teóricamente infinita.
Coeficiente de voltaje: es la medida del cambio de la
resistencia con el voltaje aplicado. Este concepto es
aplicado a potenciómetros de carbón.
3.26

Existen factores que pueden afectar la salida, entre
los más importantes se tiene la resistencia del alambre
ya que :
LR - K - (3.4)
A
Donde :
R - resistencia en ohmios
K - resistividad del conductor
L = longitud del conductor
A = área del conductor (área transversal)
Consecuentemente, un cambio en la longitud, área o
resitividad produce un cambio en la resistencia
total y afecta el valor de salida del transductor.
La temperatura es otro factor que a menudo cambia la
resistencia. Existen coeficientes de temperatura
positivos y otros negativos. En el un caso aumenta la
resistencia con el aumento de la temperatura y en el
otro disminuye.
A R - a - b R i t (3.5)
donde :
A R = cambio de resistencia
ctt; - coeficiente de temperatura del material
Ri - resistencia inicial del material
t - cambio de temperatura entre inicial
y final [°C] .
3.27

El coeficiente de temperatura a-t es el cambio de la
resistencia total cuando la temperatura varia en 1
°C expresado en [Q/Q/°C].
- Tiene problemas de fricción y es extremadamente
sensible a la vibración.
Ventajas
Aparte de los problemas mencionados anteriormente,
este transductor potenciométrico es de bajo costo
comparado con otros transductores. Puede ser fácilmente
instalado y puede ser energizado tanto en A.C. como en
D.C. Tiene una alta salida sin necesidad de
amplificación.
Además se encuentra en el mercado con facilidad y
sus costos varían conforme aumenta la precisión del
potenciómetro.
Tipos de potenciómetros
Dependiendo de la forma de su salida pueden ser:
- lineales
- logarítmicos
- exponenciales, etc.
3.28

Por el tipo de movimiento del sensor:
- lineales
- circulares
Por el material con que es construido se tiene una gran
v variedad:
- conductivo plástico: son servopotenciómetros
plásticos de precisión de una simple vuelta. Los
elementos conductivos, substratos y terminales son
modulados en el interior de un elemento plástico.
La cápsula es de aluminio anodizado y los alambres
¿f- de contacto son de metales preciosos.
- potenciómetros rectilíneos: son ensamblados en -una
cápsula de aluminio anodizado. El alambre es de
metal precioso, diseñado para minimizar la
resistencia y ruido. Los rangos de estos
potenciómetros son de 50 a 20.000 Q/pulgada ±10%.
4rTransductores Capacitivos
Consiste de dos placas de material conductivo
separadas por un dieléctrico. La fuerza a ser medida
mueve "una o ambas placas cambiando la capacitancia C del
capacitor, lo que hace variar la reactancia y
consecuentemente el flujo de corriente en un circuito.
3.29

Sea el transductor de la figura 3.6:
dieléctrico
Area de coincidencia A
Fig. 3.6 Transductor capacitivo
Se cumple la relación:
C = 0.225 kA
(3.6)d
donde:
C = capacidad [pf ]
d = distancia entre placas [plg]
A - área común de coincidencia Cplg2]
k = constante dieléctrica del material entre
placas
La constante dieléctrica K depende del material, ya
sea éste vacio, papel, mica, cerámica, vidrio, etc. A
continuación se indica algunos valores representativos de
esta constante:
3.30

vacio k = 1
aire k = 1
papel k - 2
mica k - 3
vidrio k - 8
cerámica k ~ 100
Un cambio en la distancia d se manifiesta con un
cambio en la capacidad C, y similarmente mediante la
variación del área común de coincidencia A (movimiento
relativo de las placas) o por medio de modificaciones de
la constante dieléctrica K, La variación de C se puede
medir con circuitos puente3 el que se indica en el anexo
A.3.1.
Por otra parte se tiene:
Z = - (3.7)2TCfC
donde :
Z = impedancia [Q]
f - frecuencia [Hz]
C - capacidad [f]
Se indica en la fig. 3.7 un esquema de un
transductor capacitivo para medir fuerza.
3.31

cavidad_ — •
aislante-x-
-placaestática
dieléctrico
'diafragma
(a) Esquema (b) Símbolo
Fig. 3.7 Sensor de Fuerza Capacitivo
Características
En un transductor capacitivo la impedancia de salida es
alta (103 a 10TQ). Por lo tanto hay que tomar
precauciones en el diseño de los circuitos de salida.
Se pueden emplear para medir desplazamientos al variar
d ó A. Para medir niveles de líquidos variamos K
(constante dieléctrica) que viene a ser el líquido cuyo
nivel se desea conocer.
La entrada requiere una fuerza mínima (del orden de
algunas dinas)
Sensibilidad variable, del orden de 1 pf/0.0001 plg. en
separaciones con aire.
Errores debidos a fallas en la construcción mecánica,
ruido, capacitancias parásitas en los cables
conectores.
3.32

- Los efectos de temperatura no son significativos.
- Empleado donde existen fuerzas muy pequeñas que operan
al transductor y en mediciones de desplazamiento, nivel
de líquidos, etc.
Transductor Inductivo
Está constituido por un diafragma denominado
armadura, el cual es accionado por la fuerza a ser
medida. La armadura está separada del núcleo que
contiene la bobina.
El desplazamiento o rotación de la armadura causa un
cambio de inductancia al cambiar el flujo magnético,
variando la separación de aire en el entrehierro. En un
circuito el cambio de inductancia cambia la reactancia
inductiva y consecuentemente la corriente.
La inductancia (L) de una bobina o inductor puede
variar debido a:
- material del núcleo
- separación entre armadura y núcleo
- número de espiras de la bobina
- diámetro de la bobina
- longitud de la bobina
3.33

(c<
/bobii
i>>>>
i
Fu
/armaduradiafragma
Fuerza
armaduradiafragma
(a) (b)
Fig. 3.8 Transductor Inductivo
La variación de L también se puede medir con
circuitos puente, que se indican en el anexo A.3.1
Relación:
Z = 2TCfL (3.8)
Donde :
2 = impedancia [Q]
f ~ frecuencia [Hz]
L = inductancia [Henrios]
Tanto para transductores capacitivos como inductivos
que involucran cambios de capacitancia e inductancia a
consecuencia de la aplicación de fuerzas, presión,
desplazamientos lineales o angulares, se emplean los
circuitos puente A.C. o circuitos electrónicos especiales
que ayudan a convertir estos cambios en señales de
voltaje o corriente.
3.34

Sensor por Vibración de Alambre
imán
Fuerza
Salida defrecuencia
Fig. 3.9 Sensor por vibración de alambre
Está constituido por un fino alambre de tungsteno
templado en medio de un campo magnético. El cambio de
fuerza aplicado provoca la vibración del alambre a una
frecuencia determinada por la longitud del alambre y de
la tensión aplicada.
Como el alambre vibra en un campo magnético genera
una señal eléctrica de salida que se la lleva a un
amplificador. Es necesario una señal de realimentación
al alambre a fin de mantener la oscilación a una
frecuencia deseada. La modificación de la frecuencia de
vibración esta determinada por la fuerza aplicada. La
señal de salida puede ser transmitida a través de largas
distancias sin muchas pérdidas. El aparato es sensible a
la aceleración y choques y no es considerado por lo tanto
como un elemento estable. La temperatura afecta al
alambre y su red de circuitos.
3.35

ífcSensor Oscilador
Un capacitor fió o y un inductor variable son
empleados como la entrada de un circuito oscilador
(frecuencia de resonancia). Cualquiera de estos
componentes puede ser variable.
bobinavariable
Salida
AmplificadorOscilador
I !desplazamiento
Fig. 3.10 Sensor Oscilador
El elemento que proporciona la fuerza a ser medida
puede ser agua o aire a presión. Estos cambios pueden
causar variaciones en la inductancia y alteran la
frecuencia con la que el circuito es resonante.
Cualquier cambio en el circuito resonante se puede
detectar a la entrada del amplificador oscilador.
Af = fo - fr (3.9)
3.36

Donde:
Af = cambio de frecuencia
fo - frecuencia de operación
fr = frecuencia resonante
El oscilador es pequeño con una salida muy alta. La
temperatura puede restringir el rango de operación y uso
del aparato dañando la sensibilidad del mismo. La
exactitud del aparato puede ser mala a menos que se
utilicen componentes expansivos.
Transductores Piezoeléctricos
Emplean cristales sintéticos o naturales como el
cuarzo que tiene propiedades físicas especiales. Cuando
el cristal es sometido a un esfuerzo se produce un
voltaje en su superficie. A este material se denomina
piezoeléctrico.
Este elemento piezoeléctrico también tiene la
cualidad inversa denominada electrostricción, en la que
al aplicar un campo eléctrico en esta substancia se
altera la forma del cristal-
Entonces, colocando un cristal piezoeléctrico entre
dos placas (electrodos), y aplicando una fuerza a las
placas se produce un esfuerzo y consecuentemente una
deformación, la que a su vez en algunos cristales produce
3.37

una diferencia de potencial en su superficie (efecto
piezoeléctrico). Matemáticamente tenemos:
Q = df (3.10)
Q - carga inducida en el cristal [coulombios]
F = fuerza aplicada [newtons]
d - constante piezoeléctrica
E = gtp (3.11)
E = voltaje de salida del cristal
t = espesor del cristal [m]
p - presión aplicada [newton/m2]
g - sensibilidad del voltaje
g = d/e (3.12)
e = permitividad del cristal
El anexo A.3.3. presenta algunos valores de
constantes.
NOTA: El voltaje de salida depende de la dirección en la
cual se realiza el corte del cristal con respecto a los
ejes del mismo. Estos pueden también estar sujetos a
esfuerzos cortantes en lugar de compresión, pero en este
caso el voltaje de salida se complica por la orientación
3.38

del cristal. Estos dispositivos son empleados como
transductores baratos de presión en los fonocaptores.
E - gtp
t'
X /iLcristal
X"1
Fig. 3.11 Transductor Piezoeléctrico
Características
- Entrada: puede ser fuerza
— Requiere fuerza de entrada grande comparado con los
otros sensores,
- Sensibilidad de entrada variable, dependiendo del
cristal. Así por ejemplo:
cuarzo
sal rochelle
O.05 V-m/newton
O.15 V-m/newton
Errores producidos por histéresis y temperatura ya que
las propiedades del cristal varían mucho con la
temperatura.
3.39

- Voltaje de salida proporcional a la fuerza de entrada.
- Su salida puede llegar a algunos voltios, dependiendo
del tamaño y material del cristal.
— Alta impedancia de salida, del orden 103 [MQ].
- Empleados en medición de fuerza y en micrófonos
(presión del nivel sonoro).
- Barato, sencillo y resistente.
3.2.2 Elementos elásticos T>ara medición de fuerzas
Los elementos elásticos proporcionan una indicación
de la magnitud de la fuerza mediante la medición de
desplazamiento. Asi tenemos los siguientes:
Simple resorte
Es un ejemplo de transductor fuerza-desplazamiento
F = Ky (3.13)
donde:
F - fuerza aplicada
K = constante del resorte
y = desplazamiento a partir de la posición
equilibrio
3.40

Barra simple
donde:
py
Fig. 3.12 Barra Simple
A EF - Y (3.14)
F - fuerza aplicada
A - área de sección transversal
L - longitud
E = módulo de Young del material de la barra
Y = variación de longitud de la barra
Deflexión de viga
F
L
Fig. 3.13 Deflexión de viga
3.41

3EIF - y (3.15)
L3
donde:
L - longitud de la viga
I = momento de inercia de la sección transver-
sal de la viga respecto al eje centroidal
en la dirección de la deflexión.
y = desplazamiento de la viga
Cualquiera de los sistemas descritos se emplean como
transductores de fuerza, siempre que se dispongan de los
medios adecuados para medir los desplazamientos. Por
ejemplo el LVDT es muy útil para medir estos desplaza-
mientos, asi como los capacitivos y piezoeléctricos.
3-2.3 Extensiómetros eléctricos
Princi-pio de funcionamiento: Se basan en la variación de
la resistencia eléctrica de un conductor cuando éste es
sujeto a deformación mecánica. Como la resistencia de un
conductor se calcula mediante:
LR - p - (3.16)
Adonde :
L = longitud
A = área de la sección transversal
p - resistividad del material
3.42
Jfc
Entonces ? según la ecuación 3.17, se aprecia la
variación de la resistencia al variar p , L O A .
dR dp dL dA+ - (3.17)
R p L A
El extensiómetro eléctrico más importante es la
galga estensiométrica, la misma que se la analiza a
continuación con un poco más de detalle.
Galga Estensiométrica
Este sensor experimenta un cambio en su resistencia
eléctrica al variar su longitud. Aplicados no solamente
para la medición de fuerzas sino también para la medición
de presión, desplazamientos, flujo y otras cantidades
físicas
Principio de operación : Se sabe que la resistencia de un
metal está dada por:
loRo = p (3.18)
Ao
donde:
Ro - Resistencia inicial [Q]
p - Resistividad del material [Qm]
lo = Longitud inicial [m]
Ao = Sección transversal [m2]
3.43
Si se aplica una tensión mediante una fuerza F3
entonces el material se incrementa Al.
1 = lo + Al (3.19)
V = 1 A = (lo + Al)(Ao - AA) (3.20)
, lo + Al*» R = p (3.21)
AO - AA
lo AlR w p (14-2 ) (3.22)
Ao lo
El cambio de resistencia es:
A 1R ~ 2Ro (3.23)
lo
Es de notar que (A! / lo) se convierte directamente en
cambio de resistencia.
Al sensor Strain-Gage se le conoce también como in-
dicador de fuerza, extensiometro de resistencia,
extensiometro de hilo resistente, galga eléctrica de
deformación o galga eléctrica para determinar tensiones
mecánicas.
3.44

Ti-pos de Galgas Estensiométricas
a) De alambre delgado: es el más común; el diámetro del
alambre varía entre 0.0005 y 0.001
b) Laminar: por ejemplo una hoja de menos de 0.001 plg.
de espesor.
c) Semiconductor: material a base de silicio sensible a
la deformación; fabricado en barras de espesor de
alrededor de 0.01 plg. Tiene un alto coeficiente de
resistencia por temperatura.
Los de alambre y laminar deben estar pegados
firmemente a su base. Se pueden usar con temperaturas
entre 300 °F y 500 °F (en montaje de bakelita).
a) alambre b) laminar c) resistivo
Fig. 3.14 Tipos de estensómetros
En este tipo de sensores metálicos se define la
sensibilidad (GF) que es propio de cada galga
estensiométrica.
3.45
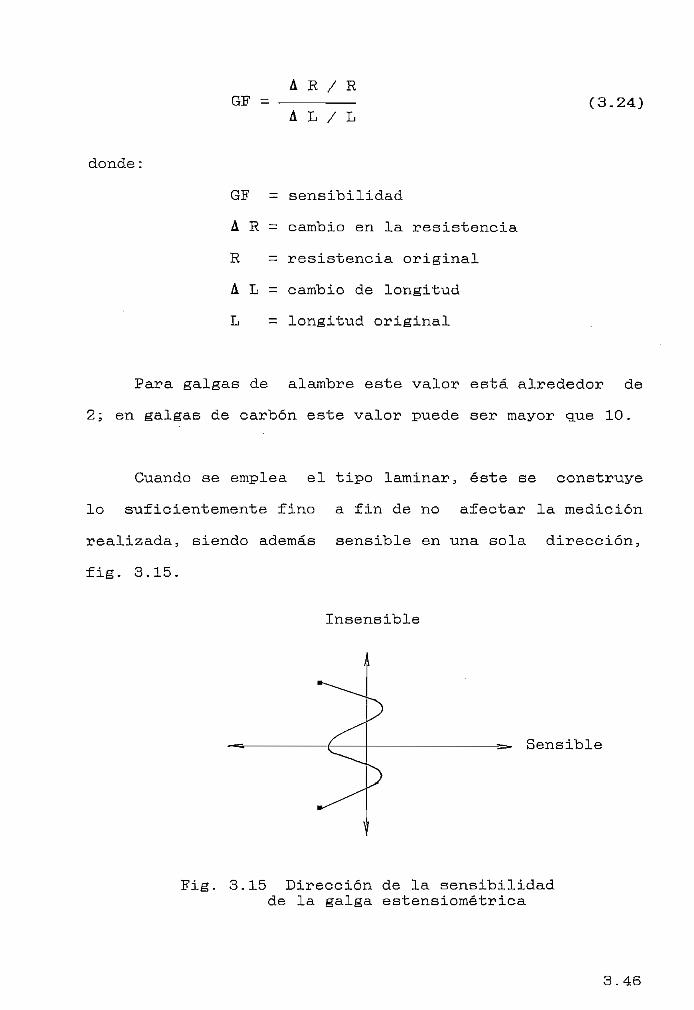
donde:
GF =
GF
A R
R
A L
L
A R / R
A L / L
sensibilidad
cambio en la resistencia
resistencia original
cambio de longitud
longitud original
(3.24)
Para galgas de alambre este valor está alrededor de
2; en galgas de carbón este valor puede ser mayor que 10.
Cuando se emplea el tipo laminar3 éste se construye
lo suficientemente fino a fin de no afectar la medición
realizada, siendo además sensible en una sola dirección,
fig. 3.15.
Insensible
Sensible
Fig. 3.15 Dirección de la sensibilidadde la galga estensiométrica
3.46

Valores típicos de resistencia para galgas
estensiométricas: 60, 120, 240, 350, 500, 1000Q.
La galga va pegada (atada) al elemento que va a ser
tensado. Consecuentemente la galga experimenta la misma
deformación- Estos son los llamados adheribles (usados
con mayor frecuencia para medición de deformaciones
unitarias), y no se pueden calibrar fácilmente ya que una
vez que se fijan a una pieza para calibración no pueden
desprenderse sin destruirse. Existen también extensió-
metros no adheribles donde las placas se mantienen juntas
con un mecanismo de resortes, mientras que los filamentos
de alambre delgado se mantienen estirados alrededor de
postes aislantes, según indica la figura 3,16. Cuando la
placa A se mueve con relación a la placa B los filamentos
sufren una deformación que se detecta con la medición del
cambio en su resistencia. Los desplazamientos permisi-
bles son de aproximadamente ±0.0015 plg. y los diámetros
correspondientes son menores que 0.001 plg.
El calentamiento por efecto Joule puede causar
problemas ya que solo el aire circundante actúa como
disipador.
Estos sensores se ven afectados por:
- efectos de temperatura
- efectos de humedad
- problemas en los cables de conexión
3.47

Debido a que sus niveles de salida son valores
pequeños es necesario una corrección mediante la ayuda de
equipo exterior. Para disminuir el efecto de
temperatura, el material empleado en una galga debe tener
un coeficiente de temperatura lineal a - 0.004/°C; la
compensación de estos efectos es importante ya que en la
industria la temperatura varia en varios grados
(inclusive decenas, centenas).
filamentos
postesaislantes
Fig. 3.16 Galga estensiométrica no adherible
Acondicionamiento de señal
Hay que considerar dos efectos importantes:
a) Debido a que se producen cambios muy pequeños del
valor de resistencia ( A R pequeños) se deben
emplear métodos muy sofisticados para medir los
cambios de resistencia; son instalados usualmente
como parte de puentes de Wheastone.
3.48
b) La necesidad de prever compensaciones por efectos de
temperatura.
Las galgas pueden ser excitadas por A.C. y D.C. y
presentan una excelente respuesta estática y dinámica.
Celdas de carga (load cells)
Son transductores para medición de deformaciones
producidas por fuerza o peso. Constituyen una aplicación
principal de las galgas estensiométricas.
Los cambios de fuerza están relacionados
directamente con los cambios en resistencia de la galga.
Se puede medir fuerzas altas (o pesos) del orden de 10S
libras.
3.2.4 Fotodetección
El sensar la luz se denomina fotodetección. Se
basa en tres fenómenos:
- fotoemisión
- fotoconducción
- efecto fotovoltaico
Fotoemisión : se generan pares electrón-hueco cuando se
presenta la incidencia de luz. Como ejemplos se tiene el
fotodiodo, el fototransistor y los tubos de vacío.
3.49

Fotoconducción : la incidencia de la luz en un material
fotosensible altera su conductividad. Ej . el resistor.
Efecto fotovoltaico : se genera voltaje al incidir la luz
sobre él.
La detección de longitud de onda que se considera
incluye:
- infrarrojo
- visual
- ultravioleta
Material Q-paco : bloquea completamente los rayos
luminosos.
Material translúcido : material que permite pasar parte
de los rayos de luz.
Material transparente : permite el paso total de los
rayos de luz.
Al intercalar estos materiales (opaco, translúcido,
transparente) entre la fuente de luz y el elemento
fotosensible (fotodetector) se obtienen variaciones en la
salida del sensor? de ahí que con la implementación de
sistemas mecánicos, la fuerza o presión a medirse actúa
directamente moviendo una placa de este material, dando
origen a una variación de la cantidad de luz que llega al
3.50

detector, y se obteniene una salida variable del sensor
como función de la fuerza aplicada.
Fotodiodos: son una versión óptica de los diodos
estándar. Están constituidos por junturas pn, los fotones
de la energía luminosa son absorbidos al interior del
aparato y generan pares electrón-huecos. Se emplea una
ancha y fina superficie para lograr máxima absorción. El
flujo de corriente depende de la cantidad de radiación
que es absorbida. En este proceso se basan también los
fototransistores.
Fotoconduoción: Emplea material semiconductor sobre el
cual incide la luz. Este material fotoconductivo decrece
su resistencia cuando se aplica la radiación, lo cual da
origen a un aumento de corriente a través de la
resistencia de carga.
rayosde luz
elemento
RLOAD
AAA-
Fig. 3.17 Circuito que emplea unelemento fotoconductivo
3.51

La resistencia del material fotoconductivo puede
cambiar de varios millones a varios cientos de Q.
Celda fotovoltaica: Está constituida por tres capas:
- placa base de metal
- material semiconductor
- delgada placa transparente
Cuando incide la lúa sobre la barrera entre la
película transparente de metal y material semiconductor
se genera un voltaje. Su salida depende de la
resistencia de carga R, Su salida es aproximadamente
logarítmica para circuito abierto. Se gana linealidad al
disminuir R.
LuzPelículaTransparente
Semiconductor
Base de metal
VOUT
Eig. 3.18 Circuito con celda fotovoltaica
Sensor fotoeléctrico: El esquema se presenta en la
figura 3.19
3.52

En este caso se tienen los siguientes componentes:
- diafragma (ventana)
- fuente de luz
- detector
Presión (Fuerza)
U M i
ventana-
fuente Jde luz
Vouo?
fotodiodo
Fig. 3.19 Sistema con fotodiodo
La fuerza aplicada acciona el diafragma abriendo o
cerrando la ventana, y por lo tanto atravieza mayor o
menor cantidad de luz al fotodiodo, el mismo que dará a
su vez una variación en la circulación de corriente.
Esta corriente podrá ser amplificada y medida. La salida
depende de la fuerza aplicada. Es un sistema lineal,
puede ser construido fuerte y exacto empleando como
fuente de luz un LED. Es una unidad simple y puede
proveer una alta salida. La respuesta de frecuencia es
baja y la temperatura afecta la eficiencia.
3.53

3.3 SENSORES ESPECIALES
Este tipo de sensores tienen características
combinadas de sensores activos como de pasivos y otros.
Emplean estas características especiales en procura de
simular los sensores naturales que posee el ser humano
(ej. una mano artificial). Algunas de sus«•
características están en proceso de investigación.
Nótese que la mano del hombre es el más perfecto
servomecanismo de control de presión mecánica ya que se
logra un control completo cuando sostiene un objeto,
sensando su peso, temperatura, forma, etc., información
^ que llega al cerebro (computador) desde donde se imparten
las diferentes instrucciones para que la mano ejerza una
determinada acción sobre el objeto.
3.3.1 Clasificación v Características
Entre los más importantes se tiene:
¿a) Sensor electrocinético
b) Sensores de tacto
- sensores ópticos
- sensores elastómetros conductivos (polímeros
elásticos)
w3.54

- sensores de estado sólido (silicona)
- sensor polímero ferroeléctrico
investigación)
(en
a) Sensor Electrocinético
Consiste de un fluido polar contenido entre un par
de diafragmas. El esquema se presenta en la figura 3,20
Placas- alambrede señal
s. "T""""/diafragma disco
poroso-alambrede señal
Fuerza
Fig. 3.20 Sensor Electrocinético
tlr
Cuando se aplica una fuerza se flexiona el
diafragma, pasa el fluido polarizado a través del disco
poroso y llega al otro diafragma. Este proceso produce
una diferencia de potencial entre las placas. También
puede operar en forma inversa, es decir aplicar una
diferencia de potencial y ocasionar una deflexión de los
diafragmas.
- 3.55
"b) Sensores de tacto
La finalidad de estos sensores es poder sostener y
manipular objetos de una manera semejante a como lo hace
el humano, es decir manipular y distinguir los objetos
inclusive sin ayuda de los ojos. Para realizar esta
t función los robots emplean sensores que miden esta
fuerza de contacto, un computador analiza estos datos y
controla el ajuste necesario y suficiente.
A continuación se da una visión de algunos de estos
sensores:
-á Sensores ópticos
Los sensores ópticos son de mayor interés e
investigación. Son altamente sensitivos, es decir, que
un cambio pequeño de la fuerza a medirse da origen a un
gran cambio de la intensidad de luz, razón por la cual
ofrecen versatilidad en el diseño, y además no
& interfieren con las señales electromagnéticas. Como
ejemplos podemos citar tres tipos de estos sensores:
1° Su esquema se indica en la figura 3.21. Emplea una
membrana flexible con una superficie reflectora,
utiliza para su funcionamiento luz infrarroja y 16
fibras ópticas además de detectores de luz (16
células sensitivas o fotodetectoras).
&3.56
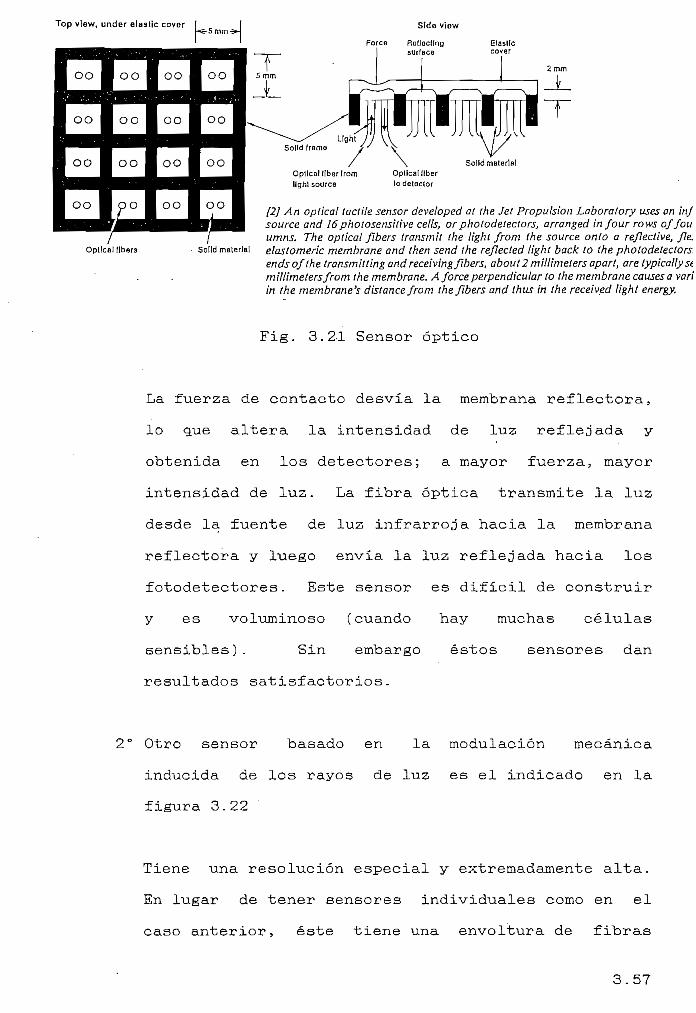
Top view, under elaslic covert-^-Smm-SH
Sida view
[2] An óptica} (actile sensor developed ai ¡he Jet Propulsión Laboraíory uses an \nfra\ and 16 pholosensitive cells, or photodetectors, arranged infour rows offour <;
umns. The optical fibers transmií the light from (he source onlo a reflective, flexttOpiícaí libara soiid material elostomerlc membrane and Ihen send Ihe reflected iighí back (o íhe photodetectors, j
ends oflhe transmitling and receivingfibers, aboul2 millimeters apart, are (ypically sevémiliimetersfrom the membrane. A forcé perpendicular lo Ihe membrane causes a variadin the membrane's dislance from thefibers and thus in the received light energy. . !
Fig. 3.2-1 Sensor óptico
La fuerza de contacto desvia la membrana reflectora,
lo que altera la intensidad de luz reflejada y
obtenida en los detectores; a mayor fuerza, mayor
intensidad de luz. La fibra óptica transmite la luz
desde la fuente de luz infrarroja hacia la membrana
reflectora y luego envía la luz reflejada hacia los
fotodetectores. Este sensor es difícil de construir
y es voluminoso (cuando hay muchas células
sensibles). Sin embargo éstos sensores dan
resultados satisfactorios.
2° Otro sensor basado en la modulación mecánica
inducida de los rayos de luz es el indicado en la
figura 3.22
Tiene una resolución especial y extremadamente alta.
En lugar de tener sensores individuales como en el
caso anterior, éste tiene una envoltura de fibras

ópticas (su resolución aumenta por la mayor densidad
de fibras). El gran conjunto de fibras ópticas
termina en un fijador de goma transparente reflec-
tiva. Este sensor capta la distribución de fuerzas
sobre su área sensora en imágenes captadas por una
cámara de TV., esta imagen está dirigida y procesada
por computadora.
CompuierTelevisión
camera
Tacllla sensor —
Opllcal líber bundle
X
WMle slllcone rubber
LIghtsoufce
Transparenl (Ubb
Epoxy
Opllcal libera
Fig. 3.22 Sensor óptico basado en modulación mecánica
Los elastometros aquí empleados se dañan después de
unos pocos cientos de ciclos de operación.
3° Un alfiler plástico conectado a un pedaao
elastométrico bloquea una parte de la luz
transmitida desde un diodo emisor de luz al
fotodetector. El alfiler se mueve de arriba hacia
abajo según sea la fuerza de contacto. Se indica su
esquema en la figura 3.23.
3.58

Forcé
Sloel piale
Pholo delector
Rubberpad
Alumlnumsupport piale
Leos
Deílecllon under/orca
Llght-emllllngdlode-
[4] A plástic pin connected ío an elastomerlc pad biocks a pan ofthe ¡íght iransmittedfrom a light-emítting diode to aphotodetec-torasíhepin movesdown underan external load. A tactlle sens-¡ng matriz using (his principie—composed of 10 by 16 elementespaced L8 mm apart—is availablefrom the Lord Corp.
Fig. 3.23 Sensor de alfiler plástico
Sensores -piezoresistivos (elastómetros conductivos)
El. cambio en la resistencia eléctrica bajo la acción
de presión (fuerza) es otra forma de. sensar fuerzas de
contacto. A éstos se les denomina elastómetros
conductivos, y son dispositivos gue tienen las siguientes
ventajas:
- Pueden obtenerse a bajo costo en delicadas hojas
flexibles.
- Este caucho conductivo (o espuma) puede medir
presiones estáticas asi como también cambios de
presión.
- Se requiere solamente un número limitado de cables
de conexión.
3.59

Cuando se aplica -una fuerza sobre la hoja del elas-
tómetro conductivo éste se comprime y disminuye su
resistencia; la medida de dicha resistencia está
relacionada con la variación de la resistencia. Los
contactos eléctricos se colocan en cada lado del
elastómetro.
Algunos elastómetros conducen electricidad en todas
las direcciones, mientras que otros lo hacen en forma
perpendicular o a lo largo de la hoja, lo cual permite
colocar electrodos en diferentes sitios.
Desventajas
- Son eléctricamente ruidosos y no lineales
- Tienen histéresis
- Poseen baja sensibilidad
- Tiempos de respuesta y recuperación altos
- Están sujetos a problemas de fatiga
Una variación de estos sensores son los elastómetros
conductivos de fibra de carbón, los mismos que poseen
alta fuerza mecánica aunque éstos materiales no son
propiamente elastómetros.
3.60
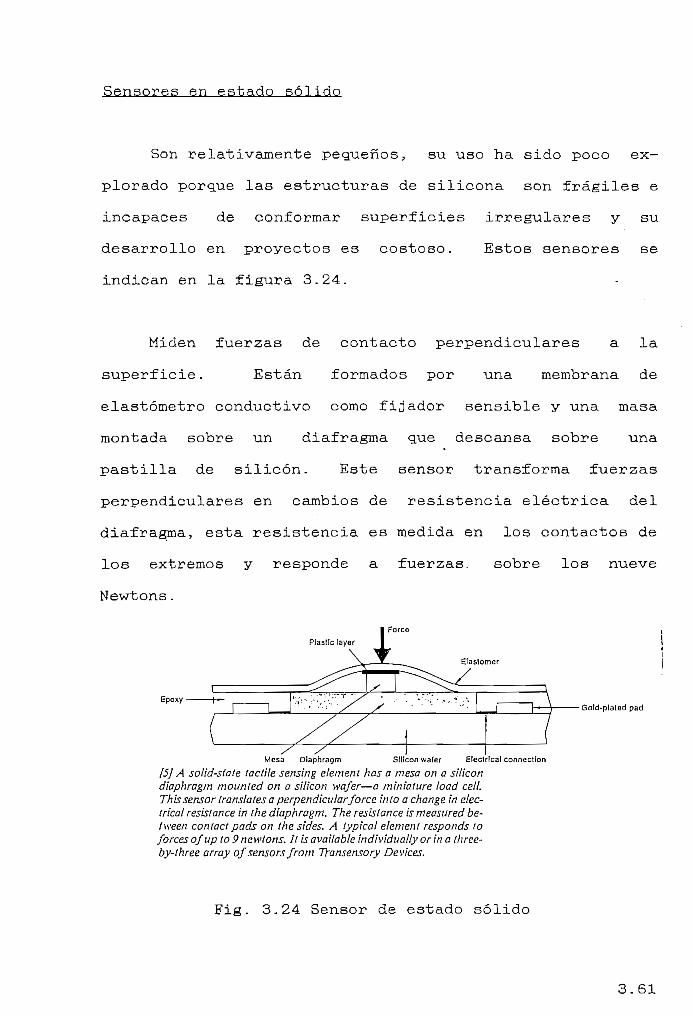
Sensores en estado sólido
Son relativamente pequeños, su uso ha sido poco ex-
plorado porque las estructuras de silicona son frágiles e
incapaces de conformar superficies irregulares y su
desarrollo en proyectos es costoso. Estos sensores se
indican en la figura 3.24.
Miden fuerzas de contacto perpendiculares a la
superficie. Están formados por una membrana de
elastómetro conductivo como fijador sensible y una masa
montada sobre un diafragma que descansa sobre una
pastilla de silicón- Este sensor transforma fuerzas
perpendiculares en cambios de resistencia eléctrica del
diafragma, esta resistencia es medida en los contactos de
los extremos y responde a fuerzas. sobre los nueve
Newtons.
Plasllc I.
EpoxyGold-plaled pad
Mesa Diaphragm Silicon waíeí Electrlcal connectíon
15] A solid-staíe tactlle sensing element has a mesa on a silicóndiaphragm mounted on a silicón wafer—a miníaíure load celLThissensor transíales a perpendicularforcé into a change in eléc-trica! resistance in the diaphragm. The resislance is measured be-(ween contact pads on the sides. A typical element responds toforces ofup to 9 newtons. It is available individually or in a (hree-by-three array of sensors from Transensory Devices.
Fig. 3.24 Sensor de estado sólido
3.61

Sensor polímero ferroeléctrico
La piel se comporta como material piesoeléctrico gue
convierte señales mecánicas en señales eléctricas y
viceversa. También tiene caracteres de material
piroeléctrico convirtiendo señales térmicas en señales
eléctricas y viceversa.
Material ferroeléctrico es aquel gue tiene
características piesoeléctricas y piroeléctricas.
Consecuentemente el tejido humano actúa como un
convertidor de energía. Algunos polímeros sintéticos
tienen esta propiedad, tal es el caso ' del PVF2
(polyvinilidum fluoride) que es un polímero fluorisado
con una combinación altamente agradable de propiedades
químicas y mecánicas, pudiéndose fabricar películas
delgadas y flexibles.
La piel actúa como receptora de fenómenos y genera
señales eléctricas que son transmitidas al sistema
nervioso central a fin de controlar los procesos. El
sistema nervioso central recalibra los receptores de la
piel. Cuando se aplica una tensión mecánica (o presión)
al material polímero éste produce una carga eléctrica, la
cual es acumulada por electrodos; esta conversión está
relacionada con el coeficiente piezoeléctrico del
material.
3.62
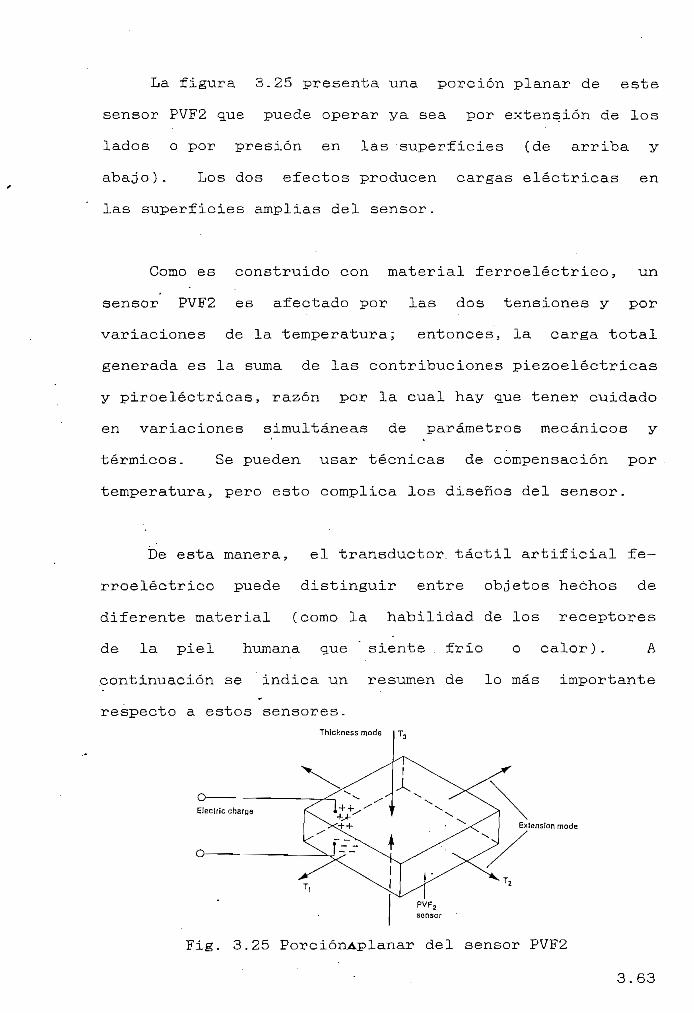
La figura 3.25 presenta una porción planar de este
sensor PVF2 que puede operar ya sea por extensión de los
lados o por presión en las superficies (de arriba y
abajo). Los dos efectos producen cargas eléctricas en
las superficies amplias del sensor.
Como es construido con material ferroeléctrico, un
sensor PVF2 es afectado por las dos tensiones y por
variaciones de la temperatura; entonces, la carga total
generada es la suma de las contribuciones piezoeléctricas
y piroeléctricas, razón por la cual hay que tener cuidado
en variaciones simultáneas de parámetros mecánicos y
térmicos. Se pueden usar técnicas de compensación por
temperatura, pero esto complica los diseños del sensor.
De esta manera, el transductor, táctil artificial fe—
rroeléctrico puede distinguir entre objetos hechos de
diferente material (como la habilidad de los receptores
de la piel humana que ' siente frío o calor). A
.continuación se indica un resumen de lo más importante
respecto a estos sensores.Thickness mode T.
O-Eleclric charge
o-
Extensión mode
PVF2
sensor
Fig. 3.25 PorciónAplanar del sensor PVF2
3.63

CUADRO DE SENSORES DE TACTO
TIP° PRINCIPIO DE PROMEDIO COMENTARIOOPERACIÓN
Elastometros Cambia la resis- Comercialconductivos tencia eléctrica
por presión
Polímeros Generación de Experimentalferroeléctricos cargas eléctricas
por deformaciónmecánica
Sensores Modulación de la Experimental La luz lie-optoeléctricos intensidad de la ga y sale
luz por mediode fibrasópticas
Pre-comereíal Convierteimágenestáctilesen visuales
Medida de Cambia la resis- Comercialtensión de tencia eléctricaSilicona por presión
3.64
3.3.2 Tendencia Futura
Como este tipo de sensores está en proceso de Inves-
tigación no existen todavía especificaciones
estandarizadas. Se toma como modelo la piel humana. Las
investigaciones de los sensores de tacto pretenden
construir sensores que tengan las siguientes
•ísticas (según las compañías Investigadoras):
Resolución espacial de alrededor de 2 mm.
(correspondientes a 2 puntos lineales del pliegue
del dedo humano^ así un orden de 10x10 elementos
sensores de tacto en una área de 25x25 mm. se
considera satisfactorio).
Sensibilidad mínima de 0.4 newtons y máxima de 10
newtons por cada elemento sensible.
Ancho de banda que cubra los 100 Hz para corriente
directa. Este ancho de banda influye
fundamentalmente en el lazo de control.
LInealizado; aunque de no cumplir este requisito se
lo puede compensar.
Baja histéresis.
Físicamente fuerte, químicamente Inerte, capaz de
3.65

permanecer en lugares hostiles. Altamente sensibles
y menos robustos se obtienen para operaciones
delicadas.
Un sensor de tacto debe ser capaz de medir fuerzas
de contacto variables en áreas sensibles. Sin embargo,
hace falta determinar otras variables como por ejemplo
dureza y propiedades térmicas de diferentes materiales;
esto puede ayudar a distinguir objetos de igual forma o
figura.
Los sensores táctiles en la actualidad no pueden ser
usados como "piel" en manos artificiales (amputación) ya
que no se puede transferir información entre el sensor y
la parte del sistema nervioso central humano como lo
harían los nervios intactos de una amputación. La
transferencia de datos es muy lenta no siendo por ello
rnuy útil .
En el futura la solución podrá ser una mano
artificial con control inteligente. capaz de procesar y
usar la información táctil, donde los dedos apretarían y
mantendrían su agarre sobre el objeto como sea necesaria.
Par otro lado un profundo efecto en el diseño de
transductores está dando el uso de la "microe1ectroñica"
y el "computador". Se tiene tres tendencias de avance:
3.66
1° Muchas de las funciones de procesamiento de señales
que antes empleaban cajas externas, ahora están
siendo construidos internamente con módulos
microelectrónicos. Se incluyen además varias
funciones como:
— amplificación
— análisis
- filtración
— almacenamiento
— digitación
Esto da como resultado sensores compatibles con los
computadores y fáciles de usarlas en grandes cantidades.
2° Sensores digitales, que son más populares. Emplean
vibración de cristales que dan como resultado una
variación de frecuencia, su tipo de salida transmite
la información más precisamente, son más compatibles
con computadores o grabadores.
3° Integrado completamente, mecánica, eléctrica y
electrónicamente. Su estructura reduce significati-
vamente las mediciones y costo de sensores.
La tendencia en sistemas es un "control computa—
rizado" muí ticanal con rangos y calibraciones automá-
ticas, monitoreo de sobrecarga e identificación
3.67
automática. Los sistemas podrán transferir múltiples y
simultáneas mediciones directamente al computador,
haciendo posible acercarse más aún al comportamiento en
tiempo real de el objeto medido-
3.4 TIPO DE TRANSDUCTOR QUE SE EMPLEARA
Clasificación y Características
Para la construcción del prototipo "Servomecanismo
de Control Análogo de Presión Mecánica" son necesarios
dos sensores; uno para sensar el peso del cuerpo y otro
para la presión que se va ejerciendo sobre el cuerpo a
sostener.
En la presente aplicación prácticamente la
distinción entre fuerza y presión no es marcada, como
ocurre en la . medición de presión de líquidos en
tuberías, etc. De ahí la razón de tratarlos en conj'unto
tanto a los sensores de presión como de fuerza ya que
estos sirven por Igual para la misma aplicación.
Conforme a lo explicado en los numerales 3.2 y 3.3,
todos los sensores ahí detalladas can ayuda de algún
mecanismo se pueden emplear en el control de presión
mecánica. Lógicamente que se debe analizar sus
diferentes características para ver cual o cuáles serían
los que convienen.
3.68

De acuerdo a 3.2 y 3-3 se podrían optar por los si-
guientes grupos en orden de importancia, precisión y
costos (lógicamente de mayor a menor).
a) Sensores especiales
Sensores de tacto :
Polímero ferroeléctricos
De estado sólido
Elastometros conductivos
Ópticos
Estos se podrían llamar los sensores del "futura",
muchos de estos están todavía en proceso de investigación
y tienen gran aplicación en el campo de la robótica.
Este sensor simula la piel humana y emplea material fe —
rroeléctrico (polímero sintético PVF2). Se lo cita como
ideal y se encuentra todavía en procesa de investigación;
consecuentemente en el futuro (caso de dar resultados
favorables) tendría un campo amplio de aplicación no
solamente en robótica sino también para reemplazar partes
del cuerpo humano (ejemplo brazas, manas, etc.)
Por tratarse de equipas muy sensibles se requiere
también de acondicionadores muy sofisticados. Aquí se
hace fundamental el uso de computador (microcomputador) a
3.69

fin de recopilar Información de los sensores y establecer
la acción de control necesaria.
Como puede verse, si bien son lo último en sensores,
sus costos son muy elevados tanto del sensor como
también de su Infraestructura, a la vez que no están
comercializados en un ciento por ciento; consecuentemente
se los menciona a manera de Información y no serán
utilizados en el prototipo.
Dentro de este grupo se Incluye un sensor análogo,
el elastómetro conductivo, que utiliza la esponja conduc-
tora en que vienen los circuitos Integrados; este sensor
es de tipo experimental y detecta cualquier presión o
peso que se ejerce sobre la esponja, sus detal les
característicos y constructivos se indican en el capitulo
IV. Este tipo de sensor con ayuda de una mejor
tecnología constructiva se puede aplicar en el
servomecanismo y a la vez tener muchas otras
aplicaciones.
b) Sensores de movimiento mecánico
LVDT — de núcleo móvil
Potenciómetro1 Ineales
circulares
1Inealeslogarítmicosexponenciales
3.70

Estos son más usadas actualmente en muchos campos y
se podrían aplicar en la construcción del servomecanismo.
De estos el mejor y más lineal, con menos pérdidas y
mucho más sensible es el LVDT (transformador diferencial
lineal variable); luego se tendría el "potenciómetro" que
a pesar de tener pérdidas por fricción del contacto
móvil, impedancia de entrada alta, efectos de ruido, etc.
con ayuda de circuitos electrónicos acondicionadores se
pueden reducir estos limitantes y abrir un gran campo de
aplicación en usos que no requieran de una exactitud
extrema; a la vez que sus costos son mucho menores que
los anteriores y se encuentran en el mercado can gran
facilidad y dependiendo de su calidad también varían
grandemente sus castos.
El sensor potenciómetrica y el de esponja son los que
se ha experimentado para utilizarlos en el prototipo,
dadas las características mejores de respuesta
(velocidad, estábil idad7 castos) es el sensor
potenciómetrico el que prevalece como sensor a emplearse
en el servomecanismo. Estos das últimos se detallan en
el capítulo siguiente, en el cual se diseña y se
construye los sensores.
De ahí que el sensor potenciométrico será el
empleada en el diseño, dado qué es un tema de tesis
experimental y las condiciones económicas del mismo no
3.71

permiten abastecerse de otros de mayor calidad o
precisión.
c) Sensores ópticos
Aunque la mayor aplicación es para detectar o medir
cantidades de luz, con ayuda de elementos mecánicas se
pueden adaptar a estos para emplearlos como detectores de
fuerza o presión mecánica. Es decir que la fuerza o
presión mecánica a medirse mueve una placa que interfiere
directamente sobre el haz de luz que 1 legaría del emisor
al detector; consecuentemente la medida de la cantidad de
luz recibida da la magnitud de la fuerza aplicada. En el
caso de los fotodiodos, f ototransistores} se tiene a
mayor fuerza, mayor circulación de corriente y en las
celdas fotovoltaicas será mayor el voltaje generado en su
salida.
d) Strain-Gage
Estos tienen una aplicación tendiente a la medición
de grandes fuerzas (mucho mayores de las que se tienen en
el prototipo). Además este es afectado por la humedad,
conexiones de las cables, temperatura, problemas estos
que de una manera u otra tenemos en el prototipo.
En resumen, la mayoría de estos sensores —
transductores se pueden emplear pero hay varios
3.72

limitantes, entre los que se puede citar:
- Son difíciles de encontrar en nuestro mercado.
— Hay que importarlos, lo que ocasiona aumento de
costos y demora.
— Difíciles de construirlos; principalmente la parte
mecánica, que requiere tecnología especial en su
construcción a fin de ganar SENSIBILIDAD y PRECISIÓN
en la respuesta de los transductores.
- Por estas razones obvias y justificativas se
procedió a construir un sensor po teñe i orné trico muy
simple y barato que, aunque adolece de errores,
ayuda a visualizar su función básica en la teoría de
servomecanismos.
3.73

CAPITULO IV
DISECO Y CONSTRUCCIÓN DEL PROTOTIPO
4.1 INTRODUCCIÓN Y CONCEPCIÓN DEL DISECO
4.2 DISEÑO Y CONSTRUCCIÓN DEL SERVOMECANISMO
4.3 DISEÑO Y CONSTRUCCIÓN DEL SENSOR
4.4 DISEÑO Y CONSTRUCCIÓN ELÉCTRICA,
ELECTRÓNICA«E
4.5 CONSTRUCCIÓN Y ENSAMBLAJE TOTAL
4.6 MEDICIÓN DE PARÁMETROS Y FUNCIÓN DE
TRANSFERENCIA DEL SISTEMA CONSTRUIDO

CAPITULO IV
DISECO Y CONSTRUCCIÓN
4.1 INTRODUCCIÓN Y CONCEPCIÓN DEL DI5ERSO
Este capitulo toma como base el estudio teórica de
las capítulos anteriores y procede al diseño, y construc-
ción de todo el servomecanismo.
Para la parte eléctrica - electrónica, que es el
punto central de esta Tesis, se procede primeramente a
realizar un análisis matemático preliminar (capítulo II )3
con el que se determinan valores posibles de parámetros.,
procediendo de esta manera a un diseño más real y
factible de realizar su construcción en el presente
capítulo. Se obtendrá finalmente una función de transfe-
rencia real en base al prototipo construida; la misma que
será objeto de análisis en el Capítulo VI.

CONCEPCIÓN DEL DISERÍO "SERVOMECANISMO DE CONTROL ANÁLOGO
DE PRESIÓN MECÁNICA"
En primer lugar daremos una visión de la forma en
que se bosquejó, de manera secuencial los diferentes
pasos durante el diseño y construcción de las etapas que
se anal izan más adelante .
a.- Conseguir la CHATARRA del servomecanismo la misma
que está formada por:
— Motor DC, control por armadura.
— Sistema de engranajes para reducción de
velocidad .
b.— Construcción del sistema tornillo sin fin, acoplada
al sistema de engranajes. Este tornillo gira en dos
cojinetes y en ésta va montada la placa móvil de
ajuste. Con esto transformaremos el movimiento
circular del motor en movimiento longitudinal de la
placa de ajuste .
c.— Construcción del soporte metálico para todo el
conjunta de piezas Indicadas anteriormente. Este
soporte consta de una parte superior móvil que
contiene: motor DC, sistema de engranajes, tornillo
sin fin, placas de ajuste (fija y móvil), en una de
ellas va el sensor de presión. Una parte Inferior
4.2
fija que hace de base donde va colocada la balanza
referencial (sensor de fuerza).
d.- Experimentación constructiva de sensores de fuerza y
presión, empleando esponja semiconductora, la cual
no proporcionó resultados favorables como se expli-
cará mas adelante.
e.- Construcción del sensor de presión y fuerza,
empleando corno sensores dos potenciómetros acoplados
con un sistema resorte, que es el que ayuda a
ejercer presión y a la vez a que el cursor del
potenciómetro regrese a su posición original luego
^S. de terminada la acción de presionar.
Hasta aquí se tienen construidas las partes
principales que son: la Planta (servomecanismo),
sensores de medición y referencialesj ahora viene
una etapa muy importante que es la base en el diseño
y construcción de los controles, la misma que
-W consiste en hacer mediciones de parámetros, curvas,&
constantes, etc, de las diferentes piezas hasta aqui
construidas.
f.— Obtención de curvas de respuesta para el ajuste del
sensor de presión colocado en una de las placas de
sostenimiento; y presenta curvas como las que se
indican en la figura 4.1.
4.3

Vout
W (peso)
Fig. 4.1 Respuesta del sensor de presiónen función del peso y rozamiento
ñu. <n=2 < r\zr. : coeficiente de rozamiento
Voutl > Vout2 > Vout3 : f(peso, rozamiento)
A menor coeficiente de rozamiento se necesita mayor
presión y consecuentemente mayor voltaje de salida
de este sensor de presión.
De estas curvas se concluye: "cual debe ser el
voltaje de salida del sensor de presión para que
éste logre sostener un cuerpo de peso y rozamiento
determinados, con la presión mínima necesaria y
suficiente". Este voltaje constituye el VALOR
REFERENCIAL que debe suministrarse automáticamente
con la BALANZA REFERENCIAL o manual con el
POTENCIÓMETRO MANUAL EXTERIOR.
4.4

g.— Obtención de las curvas del sensor de fuerza
(balanza), su respuesta se indica en la fig. 4.2.
Vout
W
Fig. 4.2 Respuesta del sensor de fuerza(balanza referenclal)
Obtenemos una sola curva en función del peso; no
interviene el coeficiente de rozamiento etc. Esta
curva que constituye la salida de la balanza, es a
la vez el valor referencial para realizar el
sostenimiento con un control automático.
Además, del análisis de la zona lineal de estos dos
sistemas de curvas (fig. 4-1 y 4.2), se define el
rango de trabajo del servomecanismo.
h.— Esta curva que constituye la salida de la balanza,
se la acondiciona electrónicamente con la finalidad
de tener respuestas congruentes a las curvas del
sensor de presión; obteniéndose de esta manera los
valores referencíales que proporciona la balanza
(sensor de fuerza). Esta referencia también se la
puede aplicar manualmente a través de potenciómetro
manual.
4.5

Resumiendo hasta aquí; el cuerpo a sostenerse se lo
coloca sobre la balanza; ésta proporciona un voltaje
de salida como función directa del peso3 el mismo
que se lo acondiciona según el tipo de superficie
del cuerpo (rozamiento) y constituye el valor
referencial (automático); entonces el servo comienza
el ajuste de las placas de sostenimiento y conforme
se va apretando el cuerpo, el valor medida (salida
del sensor de presión) va aumentándose y comparán-
dose con la referencia hasta tener un error cercano
a cero, que es justamente donde se logra sostener el
cuerpo.
Para sostenimiento en forma MANUAL se realiza el
mismo procedimiento anterior, sino que aquí la
referencia se coloca directamente con un potenció-
metro y no necesita acondicionamiento; es decir que
se marcará valores de voltaje equivalentes a las
curvas del sensor de presión al rededor de la
perilla de este potenciómetro manual.
i.- Mediciones de la respuesta del servomecanismo; es
decir se varia el voltaje de armadura y se obtiene
Va máx- y Va min. (fig. 4.3), que necesita el motor
para seguir moviendo el mecanismo, así como también
la corriente que consume el mismo.
4.6

Estos datos son importantes para proceder con el
diseño del amplificador de potencia que alimentará
el servomecanismo.
w C velocidad)
BAJADAw(max)-- — — — — —
SUBIDA
w ( m i n ) - - — — -y —
Va iin Va tinbajada subida
Va tai
Fig. 4.3 Respuesta del servomecanismoal variar el voltaje (Va)
Todas estas etapas preliminares con necesarias y muy
importantes, ya que nos proporcionan datos de los
elementas a partes constitutivas del servomecanismo,
para establecer las etapas de control, y asi de esta
manera lograr nuestro objetivo que es el "CONTROL
ANÁLOGO DE PRESIÓN MECÁNICA".
j.— Diseno y construcción del Amplificador de Potencia.
k.— Diseño y construcción del sistema de control.
1.— Ensamblaje total de todas las etapas y pruebas de
funcionamiento en conjunto.
— Establecer condiciones.
4.7

El detalle de todos estos puntos se Indica más
adelante conforme se avanza en el desarrolio de este
Capitulo.
it
4-2 DISECO Y CONTRUCCION DEL SERVOMECANISMO
(PARTE MECÁNICA).
Se Indicarán detalles de las diferentes piezas que
constituyen el servomecanismo.
PARTES DEL SERVOMECANISMO.
En relación a la figura 4.4, esencialmente está
formado por: 1. - Brazo de sujeción, 2.— Soporte total
del equipo (BASE) y 3.- Caja de control (HODULD).
FIg. 4.4 Partes del Servomecanismo
58?4.8

l.~ BRAZO DE SUJECIÓN.
Según se indica en la figura 4. 5 ? está compuesto por
- base metálica rectangular móvil.
— servomotor y sistema de engranajes.
— tornillo sin fin.
- placas de sujeción.
— sensor de presión.
— amplificador de potencia y fusibles de protección.
— switch de fin de carrera.
Servomotor EngranajesAmplificadorde patencia
fisibles
Switchde fin decarrera
basemetálica placa de
sujeciónmóvi 1
I | Sensor de Placa1 i presión sujeción
fija
Fig. 4.5 Brazo de sujeción
Este conjunto es la parte principal del
servomecanismo3 ya que en este tienen lugar todas las
4.9

operaciones mecánicas necesarias para la sujeción de los
cuerpos; además de contener partes importantes como el
servomotor , engranajes ? tornillo sin fin y píacas de
ajuste.
El braza de sujeción tiene la posibilidad de
desplazarse en sentida vertical según las necesidades y
tamaña del cuerpo objeta de la experiencia.
Consecuentemente, se tiene en este conjunto dos
tipos de movimiento: uno vertical y otra horizontal, el
primero mueve todo el conjunto, y el segundo corresponde
al desplazamiento de la placa móvil de sujeción ya sea
para ajustar (sostener) el cuerpo o para aflojar (soltar)
el mismo.
Aqui también está contenido el amplificador de
patencia y sus respectivos fusibles de protección 3 switch
de fin de carrera.
Existen dos placas de sujeción para sostener los
cuerpos, la una es fija y contiene el sensor de presión,
mientras que la otra es móvil en sentido horizontal
conforme gira el tornillo sin fin.
4.10

2.- SOPORTE TOTAL DEL EQUIPO.
El soporte viene a constituir la base sobre la cual
se asienta todo el equipo y comprende las siguientes
partes según indica la figura 4.6.
- base metálica.
— módulo de balanza referencial (sensor de fuerza).
í .n } M
¿^( -"^ ^
-^~^ de ajuste}
C—
\
b
^-^
)
bal an ¿ref erer
guia";
*\L
Fig. 4.6 Soparte total del servomecanismo
Aquí tenemos dos pernos de regulación:
(a) el primero es para ajustar la regulación del
movimiento vertical del brazo de sujeción, explicado
anteriormente.
(b) el segundo permite desplazar la balanza referencial
en sentida horizontal sobre una riel metálica, esta
ubicación depende del tamaño y forma del cuerpo a
sostenerse con relación a la ubicación de las placas
de sujeción -
4.11

El brazo de sujeción y soporte del equipo están
unidos en un solo conjunto, formando el mecanismo
necesario para sostener los cuerpos.
3.- MÓDULOS DE CONTROL.
Consiste en una caj'a metálica mecánicamente
independiente a las partes anteriores. El con j" un t o está
formado por:
- Una base que contiene todos los componentes y
controles como son:
- fuente DC + 15 V.
- tarj'eta electrónica de control .
- fusibles de protección.
- switenes, selectores,potenciómetros.
- Una tapa de latón que cubre y protege todos los
elementos descritos anteriormente.
Los detslles se indican en la figura 4.7
Este módulo constituye el cerebro del equipo; desde
aquí se opera y controla todo el con j'unto, y está
eléctricamente unido al servomecanismo mediante un "bus"
de lineas de control y fuerza.
4.12

tapa delatón
base
Ex"
Fig. 4.7 Módulo de Control
4.3 DISEÑO Y CONSTRUCCIÓN DEL SENSOR.
Una vez seleccionado el tipo de sensor - transductor
que se empleará (ya analizada en la sección 3.4), se
procede a continuación a la construcción del mismo con
sus diversos componentes.
4.3.1 SENSOR DE PRESIÓN.
Este va colocado directamente en la placa fija de
ajuste, con la finalidad de que conforme se realiza la
presión sobre el objeto, cualquier movimiento de la placa
móvil no afecte la respuesta del sensor, es decir, que
éste solamente presentará un movimiento transversal,
función directa de la presión ej'ercida sobre el cuerpo.
La presión que este sensor realiza sobre el obj'eto a
sostenerse es perpendicular al peso.
4.13

El Sensor de Presión actúa directamente en el lazo
de realimentación del servo, es decir, que proporciona la
señal de valor medido de la salida, la misma que se
compara con la señal referencial proveniente del sensor
de fuerza que se explica más adelante.
placamóvi 1
placa fija
W
Fig. 4.8 Diagrama de fuerzas queactúan en el sensor de presión
Según muestra la figura 4.8, el cuerpo queda sujeto
como fruto de la presión que ejercen las placas, esta
presión es la necesaria para compensar la acción del peso
y depende además de las características (rugosidad) de
las superficies en contacto.
El sensor está formado por:
a.— elemento sensor potenciométrico.
b.— módulo de reposición mecánica tipo resorte.
c. — placas de sujeción.
d.— acondicionador.
4.14

a,-SENSOR POTENCIOMETRICQ.
Es un potenciómetro logarítmico de movimiento
rectilíneo, el mismo que es empleada en su rango lineal
de variación de resistencia en función del desplazamiento
x .
Fig. 4.9 Sensor Potenciométrico
El contacta deslizante móvil es desplazado según se
ejerce la presión sobre el objeto, tal como se ilustra en
la figura 4.9.
Este es alimentado con +15 V DC y su sal ida varia
entre O y 15 V. con respecto al contacto deslizante (como
se indicó anteriormente, no se trabaja en todo el rango,
sino solamente en la región lineal, que de paso es
pequeña y suficiente para el propósito experimental).
Este potenciómetro no es de precisión por lo que su
costo no es elevado y se lo encuentra fácilmente en el
4.15

mercado local, luego de la experiencia realizada se
observa que cumple aceptablemente este fin experimental.
b.~ MODULO DE REPOSICIÓN MECÁNICA - TIPO RESORTE.
En realidad la construcción de la parte electrónica
es relativamente menos compleja que lo mecánico,en
función directa que se necesita acoplar piezas ya sea con
engranajes, pivotes, resortes, placas, etc.,los mismos
que al accionar deben producir un movimiento completo
sobre el sensor poten ciómetrico; ante tal situación y
tomando en cuenta los medios con que se cuenta para esta
construcción, se acondicionó botoneras tipo marcha y paro
(empleadas para controlar contactores), las que ya tienen
resorte y demás piezas armadas en conjunto; entonces se
aprovechó este pequeño rango de desplazamiento del
resorte para ejercer presión sobre los cuerpos.
A x >
FIg. 4.10 Sistema de palanca para aumentarel rango X de desplazamiento.
4.16
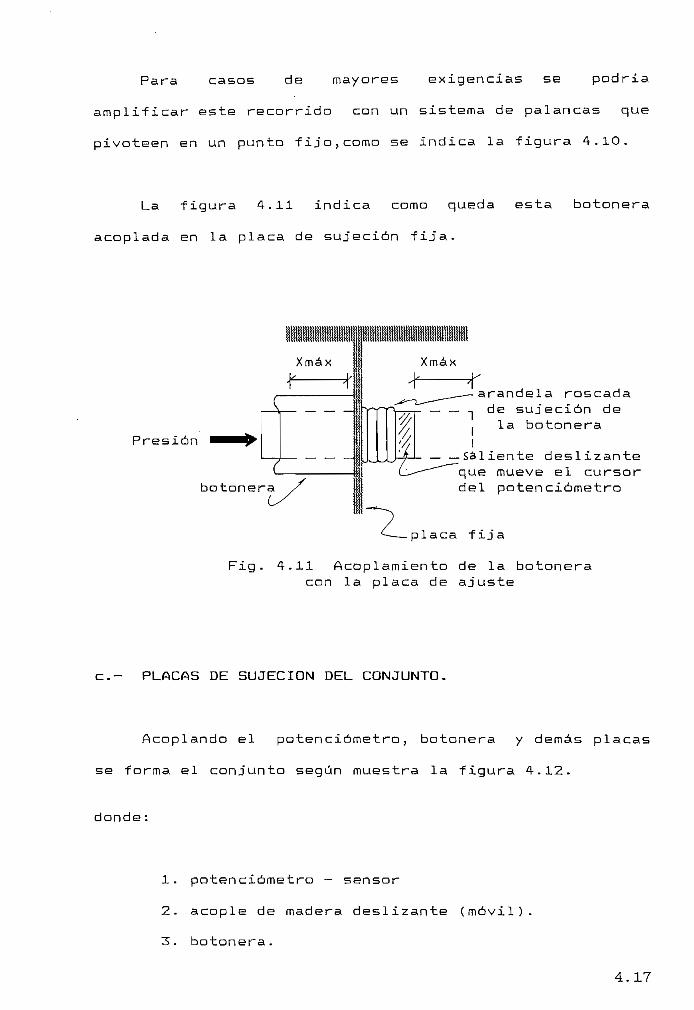
Para casos de mayores exigencias se podría
amplificar este recorrido con un sistema de palancas que
pivoteen en un punto fijo?como se indica la figura 4.1O.
La figura 4.11 indica como queda esta botonera
acoplada en la placa de sujeción fija.
Presión
botonera
arandela roscadade sujeción dela botonera
saiiente deslizanteque mueve el cursordel potenciómetro
placa fija
Fig. 4.11 Acoplamiento de la botoneracon la placa de ajuste
c.- PLACAS DE SUJECIÓN DEL CONJUNTO.
Acoplando el potenciómetro , botonera y demás placas
se forma el conjunto según muestra la figura 4.12.
donde:
1. potenciómetro — sensor
2. acople de madera deslizante (móvil).
3. botonera.
4,17

4. saliente deslizante que mueva el cursor la
distancia X máx . dentro del rango lineal del
sensor.
5. Placa fija que sostiene todo el conjunta y a su
vez va suj'eta a todo el mecanismo.
6. Placa real de sostenimiento, ésta es la que se
pone en contacto con el cuerpo.
7. Capa de material plástico—esponj'oso que por su
mayor rozamiento ayuda a sostener un mayor
rango de pesos con menor presión.
8. Cursor del potenciómetro.
Presión
Fig. 4.12 Acoplamiento total delSensor de Presión.
* Cabe anotar que el resorte va montado en el interior
de la botonera y es propio de ella.
El rango de pesos a sostenerse puede aumentarse
colocando un resorte de mayor constante elástica (más
duro), pero esto quita sensibilidad para pesos menores
4.18

(aunque sí se los podría sostener); es decir, que si
bien se puede sostener pesas menores la salida del sensor
no variaría, lo que dificulta el control automático o
manual para rangos de pesos menores; en cambio esto
sería una ventaj'a para mayores pesos.
Lo indicado en la figura 4-12. muestra el sensor de
presión completo que funciona en la siguiente manera:
Conforme va ej'erciendo presión sobre el obj'eto en
la placa 6 y 7 7 se desplaza 2 una distancia X que es
transmitida al desplazamiento del cursor del
potenciómetro 8 también una distancia X, lo que da origen
a un voltaj'e de salida variable en función directa de la
presión ej'ercida sobre el cuerpo. El resorte interno
ayuda a regresar al sensor a la posición inicial, así
como también a acumular energía elástica que se
transforma en presión sobre el obj'eto.
A continuación en el Capítulo V se indican las
curvas del sensor (fig. 5.1 b y 5.3 b ),donde se
expresa el voltaj'e de salida en función del peso a
sostener y de la naturaleza de la superficie del cuerpo
(coeficiente de rozamiento).
En estas curvas, se nota lo indicado anteriormente,
que dependiendo de la constante del resorte, y fricción
de los mecanismos, existe una zona inicial, para pesos
4.19

menores,donde el sensor no es sensible,es decir que si
bien puede sostenerlos, el voltaje de salida del sensor
no tiene variación, en cambio para pesos mayores (fuera
de rango lineal), la salida tampoco sufre variaciones, y
queda el sensor en su valor máximo permitiendo también
sostener las cuerpos, según se indica en la fig. 4.13.
Vout
Vmax —
Vmin
pesosmenores
pesos mayores
rango linealpesos intermedios
Fig . 4. 13 Curva general de la respuestadel sensor de presión
Como en un resorte:
F = K X
con la variación de K (constante del resorte) se varía el
rango de sujeción de cuerpos (pesos).
4.20

A mayor K : mayor rango de pesos mayores ?
menos sensible en pesos menores.
ñ menor K : — menor rango en pesos mayores,
— mayor sensibilidad en pesos menores
d. ACONDICIONADOR-
El voltaje de salida del sensor potenciómetrico se
lo lleva a una etapa electrónica, la misma que se encarga
de modificar esta señal a fin de que pueda acoplarse con
los demás elementos del circuito ? ya sea amplificando o
reduciendo el rango de voltaje. Los detalles de esta
etapa se indican en 4.4.2 donde se diseña toda la etapa
de control.
4.3.2 SENSOR DE FUERZA.
Este sensor actúa a modo de balanza ya que la fuerza
del peso actúa en la misma dirección que el resorte, fIg .
4.14.
W
Fig. 4.14 Diagrama de fuerzas queactúan en el sensor de fuerza
4.21

Este sensor tipo balanza, a diferencia del anterior
(que si interviene directamente en el lazo de
realimentación) , sirve para colocar el valor referencial
en función directa del peso (en el rango de trabajo
automático), es decir queda fuera del lazo de
realimentación.
Está formado por:
a. elemento sensor potenciométrico.
b. módulo de reposición mecánica tipo resorte.
c. plancha de esponja.
d. placas de sujeción del conjunto.
e. acondicionador.
a. ELEMENTO SENSOR POTENCIQMETRICO
Es idéntico al empleado en el sensor de presión.
b. MODULO DE REPOSICIÓN MECÁNICA TIPO RESORTE.
Estas dos partes, a. y b., son idénticas al sensor
de presión de 4.3.1 ya que se utilizaron los mismas
elementos, es decir:
— potenciómetro de 5 Kí> alimentado con +15 V DC.
— botonera empleada para contactores.
4.22
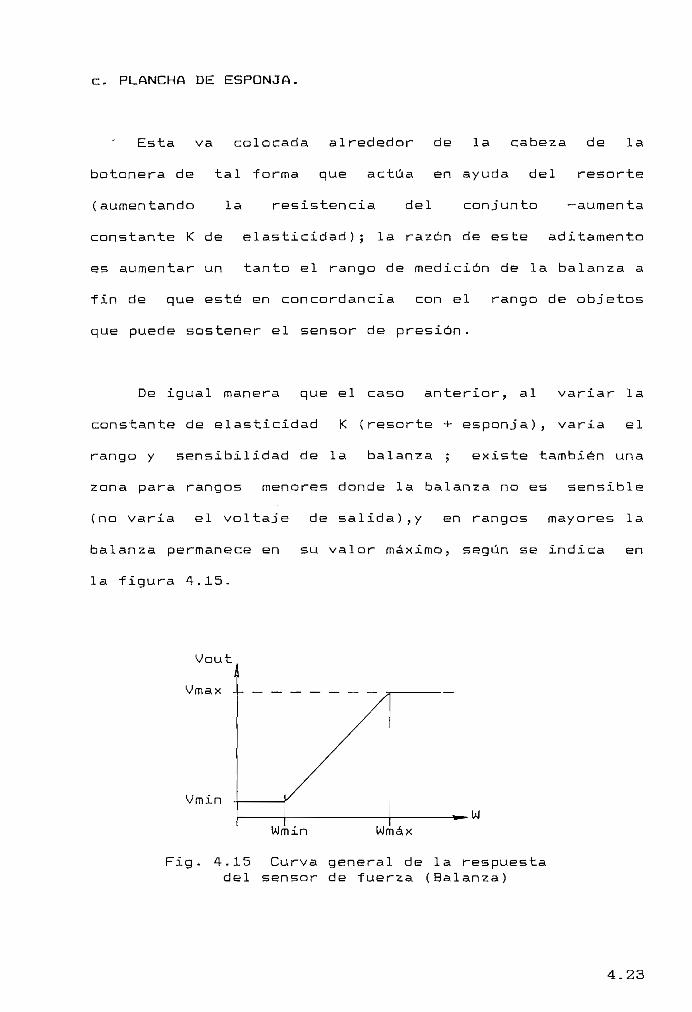
c. PLANCHA DE ESPONJA.
Esta va colocada alrededor de la cabeza de la
botonera de tal forma que actúa en ayuda del resorte
(aumentando la resistencia del conjunto —aumenta
constante K de elasticidad); la razón de este aditamento
es aumentar un tanto el rango de medición de la balanza a
fin de que esté en concordancia con el rango de objetos
que puede sostener el sensor de presión.
De igual manera que el caso anterior, al variar la
constante de elasticidad K (resorte + esponja), varia el
rango y sensibilidad de la balanza ; existe también una
zona para rangos menores donde la balanza no es sensible
(no varia el voltaje de salida),y en rangos mayores la
balanza permanece en su valor máximo, según se indica en
la figura 4.15.
Vout
Vmax _ _ _ _ _ _ _
Vmin
Wmin Wmáx
Fig. 4.15 Curva general de la respuestadel sensor de fuerza (Balanza)
4.23

ftqux si conviene trabajar solamente en el rango
lineal sensible de la balanza. Se indica en el Capitulo
V, figura 5 .1 ( a ) ? la respuesta de la balanza con sus
respectivas tablas de valores.
Nótese que el voltaje de salida (Vout.) es
independiente del coeficiente de rozamiento (por eso de
denomina balanza), es función directa y neta del peso del
cuerpo lo que no ocurría con el sensor de presión, por
este motivo su acondicionador es especial como se
indicará a continuación.
d. PLACAS DE SUJECIÓN DEL CONJUNTO.
Se tiene el siguiente conjunto de piezas acopladas
formando la balanza, según se indica en fig.4.16.
1. acople de madera deslizante (móvil),
2. placa móvil de contacto con el cuerpo.
3. esponja que ayuda al resorte.
4. botonera.
5. placa fija que contiene todo el conjunto de
piezas.
6. tuerca roscable que sujeta la botonera.
7. saliente deslizante que mueve el cursor la
distancia Xmáx. dentro del rango lineal.
8. sensor potenciométrico.
9. cursor del potenciómetro.
4.24

W (peso
Fig. 4.16 Acoplamiento total delsensor de fuerza
e. ACONDICIONADOR.
Cumple las mismas funciones que en el sensor de
presión, con la diferencia que como aquí se tiene una
medida única en función directa del peso y no depende del
rozamiento dado que este elemento proporciona la refere-
ncia del sistema ? el acondicionador debe prestar varias
opciones de tratamiento de la señal, dependiendo del tipo
de superficie (rozamiento) del cuerpo a sostener.
Par ejemplo, si el cuerpo es liso,, entonces actúa
una etapa de acondicionamiento que da un voltaje de
salida VI; si el cuerpo es rugoso, actúa otra etapa de
acondicionamiento que da una salida V2. Nótese que V2 v1!
(ya que el mayor rozamiento ayuda a sostener el cuerpo).
4.25

Voutrugoso — esponja(s . de presión)
liso — vidrio(s. de fuerza)
BALANZA(sensor de fuerza)
W
rango lineal
Fig. 4.17 Rango de funcionamiento linealde los sensores de fuerza y presión
Anal izando estas curvas y empleando su zona lineal
(figura 4.17) se ve que la salida de la balanza hay que
acondicionar en forma diferente, según sea el tipo de
superficie del cuerpo a sostenerse (fig.4.18).
ACONDICIONADORSUPERFICIES
LISAS VIDRIO
ACONDICIONADORRUGOSOESPONJA
Selector
4-
M e D I D O
Fig. 4.18 Diagrama de bloques deacondicionamiento de la balanza
referencial
4.26

Consecuentemente la serial referencial proveniente de
la balanza varia según el coeficiente de rozamiento ?
mientras que la señal medida proveniente del sensor de
presión tiene un acondicionamiento único.
ANÁLISIS VECTORIAL DE LOS SENSORES.
Balanza.—
W
Fig. 4.19 Diagrama vectorial delsensor de fuerza (Balanza)
donde:
W = N condición de equilibrio
el resorte ejerce la oposición al peso (W), es decir la
normal (N).
Sensor de Presión-—
W
Fig. 4.20 Diagrama vectorial delSensor de Presión
4.27
fr- = W para lograr sostener el cuerpo.
f = N donde f= fuerza que se debe aplicar
entonces:
fr =N nr = W
N = W / n,-
f = N = W / Hr-
f = W / IJir- (4.1)
donde: f es la fuerza que es ejercida por la placa a la
vez que presiona el resorte del sensor. Además f= K X
consecuentemente conociendo X que se desplazó el sensor y
con la constante K del resorte, se puede calcular f que
debe ser similar a la calculada con la ecuación 4.1,
igualando las dos ecuaciones últimas:
W(4.2)
K X
entonces, conociendo W, K, X se calcula p,- (coeficiente
de rozamiento).
WSe conoce que : f = P A =
WP = (4.3)
(Mr- A)
s
donde: P ~ presión
A = área
consecuentemente, a mayor área A, menor presión se debe
ejercer.
4.28
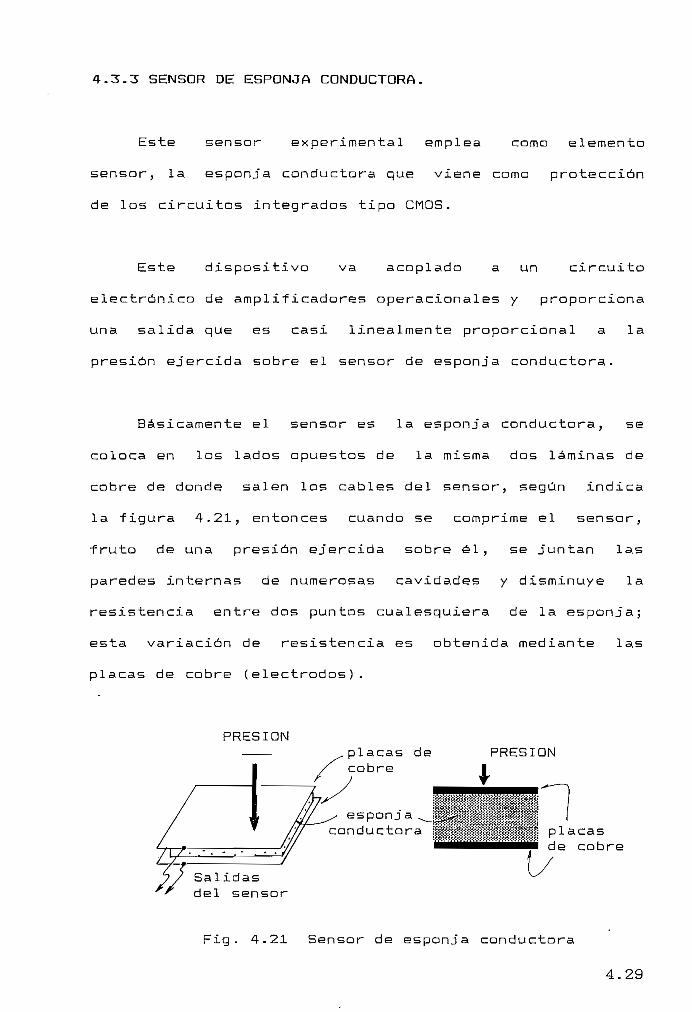
4.3.3 SENSOR DE ESPONJA CONDUCTORA.
Este sensor experimental emplea como elementa
sensor, la esponja conductora que viene como protección
de los circuitos integrados tipo CMOS .
Este dispositivo va acoplado a un circuito
electrónica de amplificadores operacionales y proporciona
una salida que es casi lineal mente proporcional a la
presión ejercida sobre el sensor de esponja conductora .
Básicamente el sensor es la esponja conductora, se
coloca en los lados opuestas de la misma dos láminas de
cobre de donde salen los cables del sensor, según indica
lafigura 4. 21, entonces cuando se comprime el sensor,
fruto de una presión ejercida sobre él , se juntan las
paredes internas de numerosas cavidades y disminuye la
resistencia entre dos puntos cualesquiera de la esponja;
esta variación de resistencia es obtenida mediante las
placas de cobre (electrodos).
PRESIÓNplacas decobre
esponjaconductora ss^r T7í"; Jj^~," placas
' de cobre
Salidasdel sensor
FIg . 4.21 Sensor de esponja conductora
4.29

•é
A continuación se indica, el la figura 4.22, el
circuito que acondiciona la señal proveniente del sensor.
El sensor y Rl constituyen un divisor de tensión,
este voltaje aumenta al incrementar la presión sobre
éste; esta señal ingresa a un acoplador de impedancias
formada por IC1 y de este pasa a IC2 para tener una mayor
amplificación, de donde se obtiene la salida proporcional
a la presión mecánica ejercida sobre la esponja sensora.
12 V
Sensor
sal ida
22KQ -> R4 12 V
4KQVrl
Fig. 4.22 Circuito acondicionadordel sensor de esponja
El potenciómetro Vrl es el ajuste de la señal de
salida para cuando no existe señal de entrada ( presión
nula).
4.30
Rl se aconseja que sea :
•é
3Rl = - R sensor
4
consecuentemente en el circuito acondicionador se tiene
que en :
(a), este punto aumenta su voltaje, al aumentar la
presión sobre el sensor, ya que disminuye la
resistencia de la esponja.
(b). este punto tiene el mismo voltaje de a con la
diferencia que pasa a través de un acoplador de
impedancias .
(c) es un amplificador no inversor de ganancia A
R3A = 1 + - (4.5)
R4
donde R4 es variable adicionando un potenció-
metro de ajuste para la salida.
Para la determinación de la característica se
adjuntan las tablas de valores en el Capitulo V con
mediciones realizadas en estos sensores.
4.31

4.4 DISERSO Y CONSTRUCCIÓN ELÉCTRICA, ELECTRÓNICA.
En un sentido práctico, es en esta etapa, donde se
aplican criterios tanto de diseño, como de construcción
en el campo eléctrico, electrónico, que básicamente
constituyen la esencia del presente tema de tesis en
conj'unto con la teoría de sistemas de control
real imentado.
Los diseños y construcción electrónicos deben estar
en coordinación con el análisis del comportamiento de
Sistemas de Control, o en su defecto se harán los aj'ustes
necesarios en la circuí te ría para lograr este obj'etivo.
El diseño y construcción eléctrica, electrónica
comprende:
a. Amplificador de Potencia
b. Circuítería electrónica de control.
c. Fuentes de voltaj'e DC.
4.4.1 AMPLIFICADOR DE POTENCIA.
Se empleará el amplificador de potencia tipo T tal
como se indicó en la sección 2.1.4.2 donde se indican las
características de funcionamiento de este circuito
amplificador.
4.32

Este amplificador se lo denomina de patencia ya que
suministra la energía al servomotor, que es a su vez el
que mueve la planta.
La salida de este amplificador está controlada
directamente con la señal de control la cual variará
dependiendo de la señal de error que exista entre el
valor de referencia y el valor medido.
Datos: a continuación se indican los datos de los
diferentes componentes y partes que constituyen la base
para el diseno.
SERVOMOTOR + ENGRANAJES + TORNILLO
V DO = 12 V
I DC = O.5 A
Tomando como referencia las mediciones del Capitulo
V, tabla 5.ó, los datos de la curva de la figura 5.4
cuando presionan las placas, son los que se deben
utilizar en el diseño del amplificador de potencia.
En conclusión el amplificador de patencia debe
proporcionar aproximadamente la siguiente respuesta:
4.33

ENTRADA
), = 15 V
rt = 6 V
SALIDA
V* mAl, = 12 V
V» min de bajada= 3.5 V
con carga
dentro de estos limites el amplificador de potencia debe
tener una respuesta lineal.
SALIDA MÁXIMA DE LOS AMPLIFICADORES OPERACIONALES.
lout = 1.7 mA máximo (dato del fabricante), constituye la
corriente máxima que suministra el circuito de control
electrónico que alimenta a las bases de los
que conforman el amplificador de patencia.
DISERJO DEL AMPLIFICADOR DE POTENCIA.
Se han escogida los transistores complementarios de
potencia ECG 268 y ECG 269, cuyas características básicas
son :
Ptí « 10 W
1= = 2 A
(otras características se indican en anexo A.4.4)
4.34
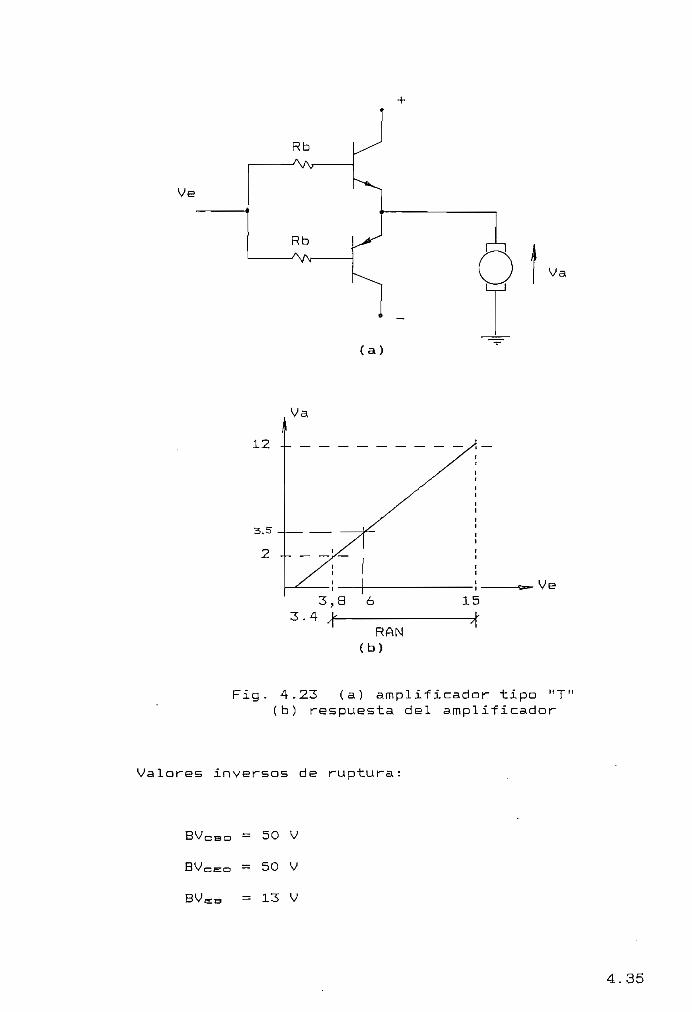
Rb
Ve
Rb
(a)
Fig. 4.23 (a) amplificador tipo "T1(b) respuesta del amplificador
Valares inversos de ruptura:
BVCBo = 50 V
BVCE:o = 50 V
BVES = 13 V
4.35

* Salida máxima de los amplificadores operacionales:
lout-t = 1-7 mA
# La configuración utilizada es la indicada en la figura
4 - 23 (a) .
En el instante antes que se pare el motor:
Va = 3.5 V
VB mdLr, = 3.5 + 2X 0.7 = 4.7 V
entonces Ve > 4.9 V ; se asume que Ve = 6 V,
Ve = IB Rs + VBE: (RAN) + Va
IE = 10OO IB + IB
IE = 1000 IB
Ve = le RB / ORE: + VBE (RAN) +Va
para Va = 3.5 V ; la = 0.38 A tomado de tabla 5.6 del
motor un instante antes que se pare.
4.36

6 = 0.38. RB / 1000 + 2x 0.7 + 3.5
RB = 2894.7 íí
se escoge: RB = 3 KQ
recaí culo de Ve:
Ve = VRt3 + VBE (RAN) + Va
Ve = Ie RB / hp-e + VBE (RAN) +Va
Ve = 0.38* 3000 / 1000 + 2* 0.7 + 3.5
Ve = 6.O4 V ; cuando Ve = 6.04 V, entonces Va = 3.5 V
* Cálculo V. m*».( = ? para que la salida sea:
Va = 12 V
la = 0.53 A; de acuerda a la Tabla 5.6
V. m*,( = VRt, + 2* 0.7 + 12
V. mA« = 0.53 * 3000 / 1000 + 2* 0.7 + 12
V. m*M = 14.99 V S 15 V.
Se comprueba si el transistor está trabajando en la
región Activa Normal RAN:
4.37

15 = 12 + 2* 0.7 + Ves
Vc^ = 1.6 V
Voc = — 1.6 V ; juntura BC polarizada inversamente
entonces si está en la RAN .
asi como también con V. m;Lr, :
VCC = Va + VBE + Ves
15 = 3.5 + 2* 0.7 + Ves
VCB = 10.1 V
15 V
RB BVe
OI I
Fig. 4.24 Etapa positiva delamplificador "T"
4.38

VHC = —10.1 V ; juntura BC polarizada inversamente,
entonces si está en la RñN.
Se comprueba que el transistor no entre en saturación
con entrada máxima Ve = 15 V:
3KQ B15 V
15 V
C
0.2
i i14.a
Fig. 2.25 Etapa positiva delamplificador tipo "T"
suponiendo que esté en saturación:
15 = 3000 IB + 2* 0.8 + ( Ic + IB ) Ra
15 = 0.2 + ( lo + I
Va = 15 - 0.2 = 14.8 V
15 = 3000 I» + 2* O.8 + 14.8
4.39

IB -(15 - 2* 0.8 - 14.8) / 3000
IB = - 0.46 rnñ ;
absurdo, es decir como que cambia la dirección de la
corriente, además dado que Va = 14.8 V ; Ve debe ser
mayor que 14.8 dado que el motor está en emisor y no
en colector como es lo usual para saturar con menor
voltaje.
Como Vem.*« - 15 V no satura.
# Análisis para detrminar que cuando el transistor Ql
conduce con Ve máx ; Q2 no se polarice directamente; a
fin de que Ql y Q2 no conduzcan simultáneamente y
produzcan un corto circuito.
+ 15 V
C
Ql3K B
VeE i-
3K BQ2
C
-15 V
Fig. 4.26 Amplificador tipo "T" completo
4.40

. con Ve máx = 15 V
análisis de Ql
Se asume aproximadamente que la = O.53 A
15 =( O.53 #3000) / 1000 + 2 # 0.7 + Va
Va = 12.55 V
Vm a=s = 15 V
entonces: VES c, - 12.55 - 15 = -2.45 V
Q2 no conduce, está polarizado inversamente, no se
produce conducción de Q2, no existe corto circuito.
Siempre que este en RAN uno de los transistores, la
juntura del otro no permite su conducción; es decir que
el uno conduce en RAN y el otro está en corte.
Entonces se usa: RB = 3 K y disipa una potencia de:
PRO = (0.54 * 3000) / 1000 - 0.87 W
4.41

lamAx = 0.54/1000 = 0.54 mA < 1.7 mA máximo de
salida que dan los Amplificadores operación ales.
I«r-l-»neqw. = 4 # la
I r-t-*,-. . = 4 * 0.54 A = 2.16A, que no es menor
a 2 A3 que soportan los transistores en
régimen estable.
Pero esto no es problema ya que es un fenómeno
transitorio.
Potencia máxima que disipa el transistor:
Pmáx . = Icm.*>c • VcEm*w no son condiciones
simultáneas pero dan referencia máxima de
diseño.
Pm*K = 0.54 #( 15- 3.5) = 6.21 W < 10 W que
soportan los transistores.
B VEBmAM = 15 - 3.5 = 11.5 V < 13 V que
soportan los transistores con polarización
inversa base — emisor.
4.42

Además es de notar que estos dos no son
simultáneos pero sirven para calcular una
condición muy critica .
. El fabricante indica : BVcso < 50 V
BVcEo < 50 V
en este caso el máximo valor será 10.1 V cuando se
polariza inversamente y está en RftN como ya se
calculó .
< 50 V
en este caso BVcEo = VccmA« - VamdLn
BVceo =15 - 3.5 = 11.5 V ,ya que los dos
transistores no conducen simultáneamente .
También son condiciones no simultáneas pero
valen la pena para referencia de diseño .
- Se ve claramente que los transistores y demás
elementos de diseño cumplen o satisfacen las condiciones
requeridas, asi como también las caracteristicas de los
mismos son mayores que las que se dan en el circuito,
consecuentemente se implantará un circuito bien
dimensionado ( y en cierta medida , sobredimensionado ) ?
figura 4.27.
4.43

3K-AARl
+ 15 V
Ql
3KWRl
Q2
' -15 V
Va
Fig. 4-27 Amplificador tipo "T" diseñado
Rl 3000 fí ; 1/2 W ( 1/4 W ) ; 57.
Un potenciómetro comUn P en la base permite tener
variaciones de ganancia del amplificador de potencia;
condición ésta que no se la implantará en esta tesis por
no considerarla necesaria.
La figura 4.28 indica datos numéricos de la
respuesta del amplificador de potencia diseñado.
= 15 V
= 6.04 V
Va = 12 V
Va= 3.5 V
Donde :
m = 8 / 10 = 0.8, aproximación a una recta,
ganancia del amplificador de potencia es 0.8
4.44

12
Va [V]
aproximación1 ineal
respuestareal
í fe—1: CV]
Fig. 4.28 Respuesta numérica del amplificadoramplificador de potencia "T" diseñado
CONSTRUCCIÓN DEL AMPLIFICADOR DE POTENCIA.
Tomando como referencia los datos obtenidos en el
diseño se emplearen los siguientes elementos en la
construcción del Amplificador de potencia.
2 resistencias de 3 Kfi
2 transistores complementarios tipo darlington ECG 268
y ECG 269.
1 disipador térmico donde van instalados los
transistores de potencia.
4.45

2 fusibles de protección de 0.5 A
2 switches de fin de carrera
Todo este conjunto forma la etapa de potencia que
maneja el servomecanismo y van instalados en el brazo de
sujeción. Este conjunto comprende los siguientes bloques
indicados en la figura 4.29.
RESISTENCIADE BASE
í R !1 y A 1
Vr> V ^KO ¡
error ¡ R í
I
SWITCHES DEFIN DE CARRERA
)ISIPADORj
t
1[
DÉRMICO
SERVOMOTOR
,--, /
ó'cp
FUSIBLES DEPROTECCIÓN
Fig . 4.29 Diagrama de bloques delamplificador de potencia
Constructivamente y por seguridad se hace necesario
intercalar fusibles de 0.5 A en los colectores de los dos
transistores, estos protegen el amplificador (transisto-
res) de sobrecargas o atascamientos que tenga el
4.46

servomotor , así como también evita un corto
entre los dos transistores en caso de que estos llegaran
a conducir simultáneamente (condición que no debe ocurrir
al tener un buen diseño) .
Además también se tiene dos switches de fin de
carrera que controlan el rango máximo y mínimo de
apertura de las placas, fuera de esta zona estos switches
abren el colector del transistor y queda sin alimentación
el servomotor el mismo que paraliza el servomecanismo.
El disipador térmico cumple un papel muy importante
en la irradiación del calor que se produce en los
transistores la que alcanza su máximo valor el momento en
que el servomotor disminuye su velocidad, ya que Va es
pequeño, entonces VCE es máximo.
En el Capitulo V se indican datos numéricos y curvas
que dan una visión clara de como opera este amplificador.
Hay que tomar en cuenta que :
— RB no puede valer cero
— Los dos transistores que forman el amplificador de
patencia no pueden entrar en conducción simultanea,
es decir que cuando opera Ql7 el Q2 debe estar en
corte y viceversa -
4.47

V
— Los transistores deben ser complementarlos.
- Estos deben trabajar en reglón activa normal RAN o
en corte (no se debe llegar a saturación). Hay que
evitar trabajar en regiones cercanas a la de
saturación ya que VCE disminuye, Va aumenta y si RB
es pequeña, VBQ2 puede ser menor que Va,conduce Q2 y
existe cortocircuito entre Ql y Q2.
— Incluir siempre fusibles de protección.
- Emplear disipadores térmicos en el montaje de los
transistores del amplificador.
Cualquiera de las acotaciones antes indicadas que no
se cumplan pueden ocasionar daños en estos transistores;
que dicho sea de paso tienen un costo elevado.
VARIACIÓN DE LA GANANCIA DEL AMPLIFICADOR DE POTENCIA.
Como se Indica en el estudio teórico del Capítulo II
la variación de la ganancia de un servomecanismo produce
cambios en su respuesta principalmente en la estabilidad,
respuesta transitoria ete; la misma que puede ser
modificada de acuerdo a las necesidades del
servomecanismo.
4.48

En este caso, al variar la ganancia del Amplificador
de Potencia, cambia la ganancia total del servomecanismo.
Esta variación no es necesaria realizarla ya que con los
valores de diseño se cumplen rangos de funcionamiento
adecuados y aceptables. Además?como se explica a
continuación, estas variaciones dificultan el control
real imentado ya que se tendría que variar también los
valores referencíales.
En la figura 4.30 se aprecia como Influye la
variación de la ganancia en la respuesta. Se desea que
para Vemir-, se produzca siempre un mismo valor Vamin . ,
objeto éste que no se logra al variar la ganancia ya que
por ejemplo, si disminuimos la ganancia se necesitará un
mayor Ve para tener un mismo Vam;Lní en caso contrario el
mecanismo se paraliza antes de lograr el ajuste.
RKR2<R3. . . <Rmáx
Va
Va máx
R3 \aumenta laganancia
Va mín - _ _ - _ _ — _ —
VeVe min Ve máx
FIg . 4.30 Respuesta del Amplificador depotencia al variar la ganancia
4.49

Nótese que Ve (voltaje de error) es necesario variar
para mantener esta condición, lo que significa una
variación del valor referencía13 ya que:
V. = - vr
y esto dificulta nuestro control de servomecanismo.
La variación de la ganancia se la hace con la
variación de RB entre un rango mínimo y máximo (a mayor
RB, menor ganancia; a menor RB mayor ganancia).
Esta variación de ganancia (sin variar la referen-
cia), puede no sujetar al cuerpo (al disminuir la
Ganancia), o ajustaría demasiado (al aumentar la
ganancia).
Ya para controles más sofisticados se puede tener
estas variaciones dependiendo el tipo de aplicación que
tenga el servomecanismo.
Consecuentemente sí se puede variar la ganancia para
lograr mejores efectos en el control; a cambio de
modificar también el valor referencial (como éste queda
fuera del lazo de control no causa efectos). En el
presente caso por análisis del Lugar Geométrico de las
Raíces la ganancia puede variar hasta infinita sin
afectar la estabilidad.
4.50

4. .2 SISTEMA DE CONTROL.
El control que se indica a continuación es
fundamental en el funcionamiento del servomecanismo; es
aquí donde se materializa prácticamente la teoría de
sistemas de control.
Mediante estos circuitos de control se Ínterconectan
los sensores, elementos de mando (swltenes? pulsadores,
selectores etc.)f servomotor y servomecanismos.
Aquí se procesa toda la información tanto exterior
como Interior del funcionamiento del sistema; y
conjugando todos estos parámetros se obtiene el control
de presión mecánica que es de Interés en el presente terna
de tesis.
El control electrónico es analógico en su totalidad
y puede servir de base para realizar controles digitales
empleando Inclusive microprocesadores, los cuales pueden
ser objeto de otros temas de tesis.
El control está basada fundamentalmente y toma como
referencia las curvas de respuesta tanto de los sensores
de presión, como de fuerza y realiza comparaciones entre
estas dos salidas.
4.51

SENSORFUERZABALANZA
VrefP A
o AMPLIFICADOR SERVOMECANISMO
Vm
SENSORDE
PRESIÓN
Fig . 4.31 Diagrama de bloques del servomecanismocontrol análogo de presión mecánica
El control se basa en el diagrama de bloques de la
figura 4.31, donde se aprecia que el valor referencial es
suministrado por la balanza (sensor de fuerza) en el caso
de control automático, o con un potenciómetro exterior
para calibración manual del valor referencial. Esta refe-
rencia depende también del tipo de superficies en
contacto (superficie del cuerpo y de las placas de
sujeción), de ahí que se emplean acondicionadores depen-
diendo del caso.
El valor medido constituye la señal de
realimentación y es proporcionado por el sensor de
presión colocado en la placa de sujeción, éste suministra
una salida que es función directa de la presión que
ejercen las placas de sujeción sobre el cuerpo. La
comparación entre valor referencial y medido constituye
la señal de error que es amplificada y alimenta al
servomotor que mueve el servomecanismo.
4.52
Es Importante destacar que a diferencia de lo
estudiado en el Capítulo II, se añade al punto de suma un
valor de voltaje denominado A muerta y representa el
mínimo valor de voltaje que se debe suministrar al
servomecanismo para que este siga su movimiento (voltaje
que es dependiente directo del rozamiento,
perdidas,momento de Inercia, etc.). Entonces el valor de
error está representado por la ecuación 4.6.
Error = (W.-f - Vm.d ) + A muerta (4-_6)
donde se tiene que cerca de Igualar vV.T y v~m.d ? el error
que debería ser cero, pasa a ser A muerta, y es el mínimo
necesario para mover al serva y lograr el ajuste preciso;
si no se Incluyere Amuerto en el punto de suma, antes de
que Vref = Vmed. el servo se pararía y no se lograría el
ajuste necesario del cuerpo ( cuando VV^-r = Vm.d, entonces
sí se tiene el ajuste preciso).
Este circuito de control, que se diseña paso a paso
más adelante constituye el eje fundamental para manejar
todo este servomecanismo, de ahí su importancia tanto en
el diseño y construcción.
En general este circuito de control cumple los
siguientes pasos:
4.53
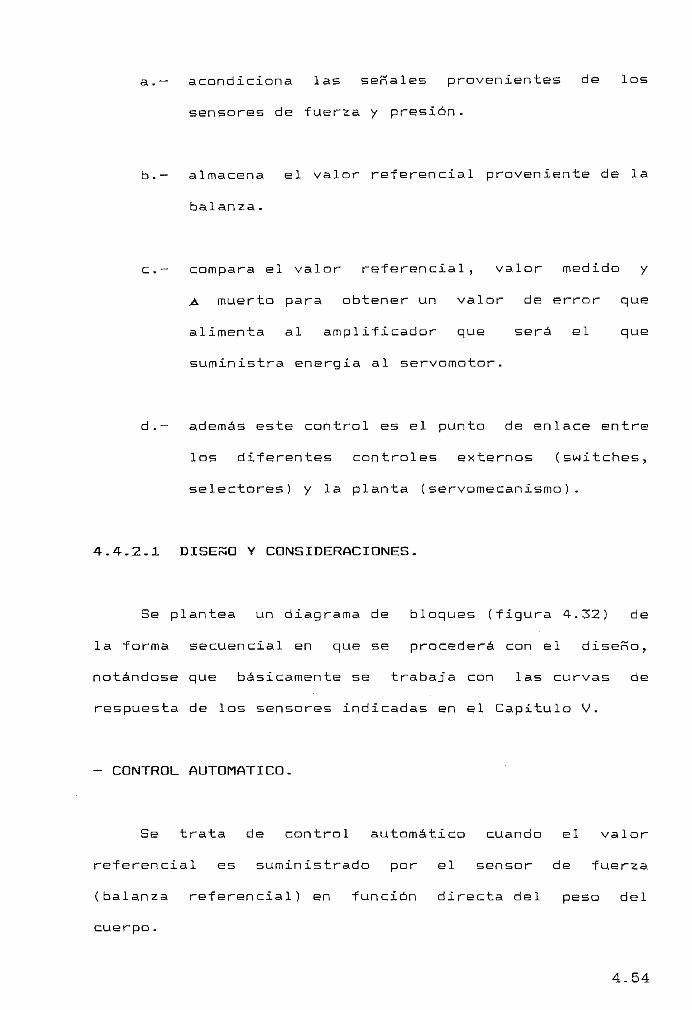
a.— acondiciona las señales provenientes de los
sensores de fuerza y presión -
b . - almacena el valor referencial proveniente de la
balanza -
c.- compara el valor referencial, valor medido y
A muerto para obtener un valor de error que
alimenta al amplificador que será el que
suministra energía al servomotor.
d.— además este control es el punto de enlace entre
los diferentes controles externos (switches,
selectores) y la planta (servomecanismo).
4.4.2,1 DISECO Y CONSIDERACIONES.
Se plantea un diagrama de bloques (figura 4.32) de
la forma secuencial en que se procederá con el diseño,
notándose que básicamente se trabaja con las curvas de
respuesta de los sensores indicadas en el Capitulo V.
- CONTROL AUTOMÁTICO.
Se trata de control automático cuando el valor
referencial es suministrado por el sensor de fuerza
(balanza referencial) en función directa del peso del
cuerpo.
4.54

Se trabaja con la zona aproximadamente lineal de
las curvas de respuesta de los sensores (se aproximan a
rectas). Esta es una zona lineal pequeña, pero si cumple
satisfactoriamente nuestra experiencia.
Aproxima las curvas a una linearecta en la zona lineal coman
Aumenta A = 0.2 V en la curva refe-rencial del sensor de presión a finde garantizar la sujeción del cuerpo
Cálculo de ecuaciones de las aproximaciones de las curvas a rectas.
Para cuerpos de superficies lisasde vidria, y rugosas de esponja sesigue la misma secuencia.
Diseño del acondicionador de la balanza:se trata de igualar las dos curvas(sensor de presión y fuerza) y obtenerde esta manera un valor referencialfunción del peso yde la superficie del cuerpo.
Fig . 4.32 Diagrama secuencial del diseño
CONTROL MANUAL.
A diferencia del control automático, aquí la
referencia la coloca el operador mediante un potenció-
metro exterior cuyo valor depende del tipo de superficie
y del peso del cuerpo a sostenerse.
4.55
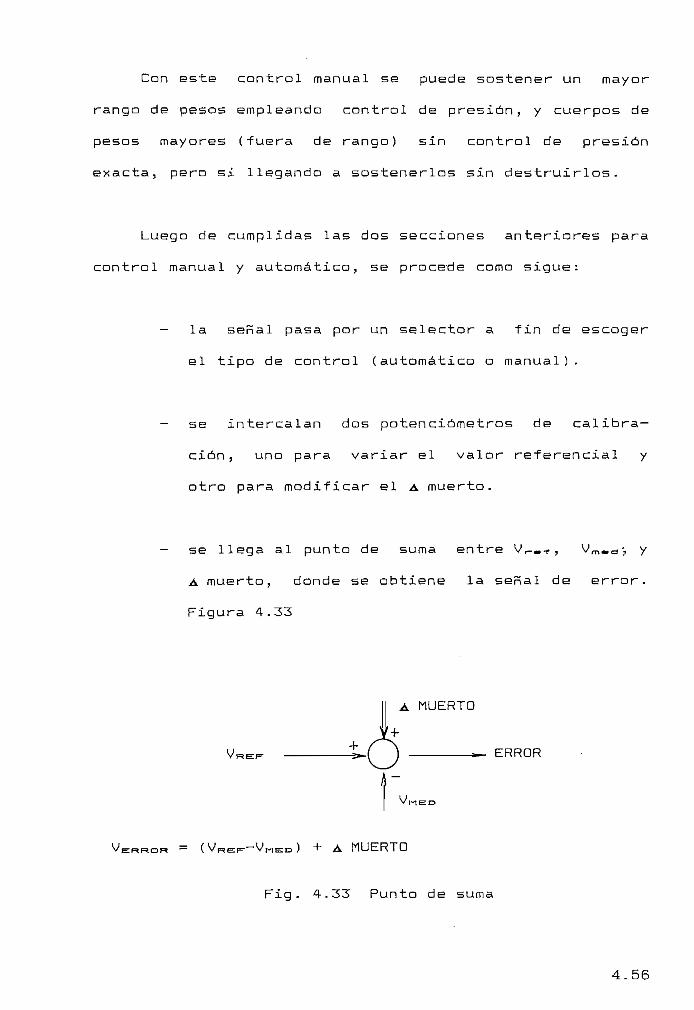
Con este control manual se puede sostener un mayor
rango de pesos empleando control de presión, y cuerpos de
pesos mayores (fuera de rango) sin control de presión
exacta, pero sí 11egando a sostenerlas sin destruirlos.
Luego de cumplidas las dos secciones anteriores para
control manual y automático, se procede como sigue:
— ia señal pasa por un selector a fin de escoger
el tipo de control (automático o manual).
- se intercalan dos potenciómetros de calibra-
ción ? uno para variar el valor referencial y
otro para modificar el A muerto.
- se 1 lega al punto de suma entre V,-«,f , Vm^d*, y
A muerto, donde se obtiene la señal de error.
Figura 4.33
A MUERTO
- ~ ERROR
'ERROR
V,
+ A MUERTO
Fig. 4.33 Punto de suma
4.56
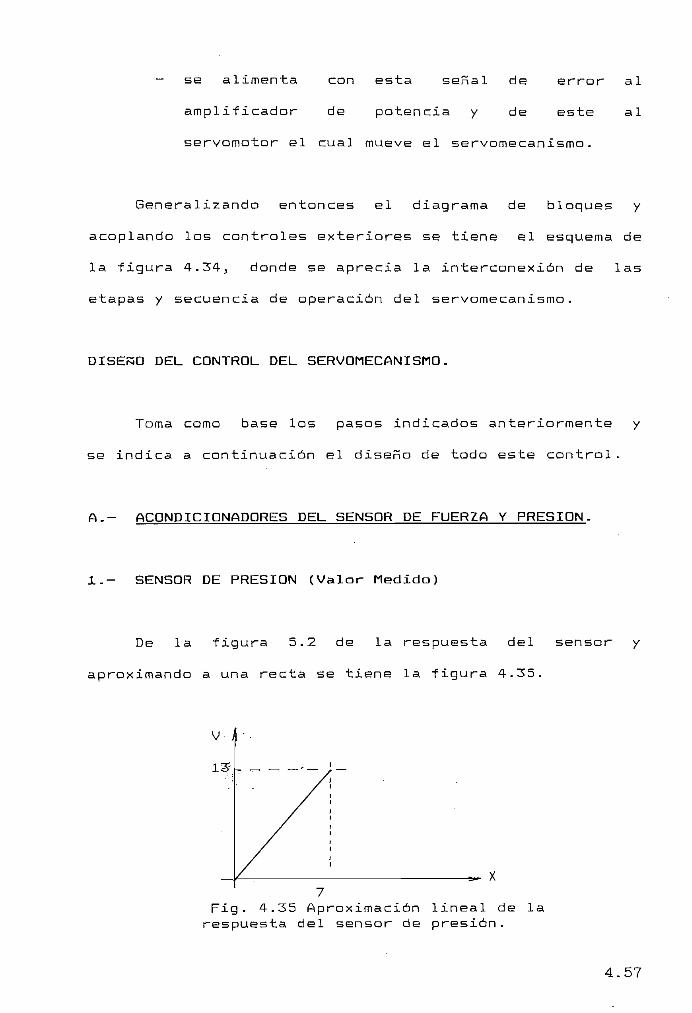
- se alimenta con esta señal de error al
amplificador de potencia y de este al
servomotor el cual mueve el servomecanismo.
Generalizando entonces el diagrama de bloques y
acoplando los controles exteriores se tiene el esquema de
la figura 4.34, donde se aprecia la Interconexión de las
etapas y secuencia de operación del servomecanismo.
DISER3O DEL CONTROL DEL SERVOMECANISMO.
Toma como base los pasos indicados anteriormente y
se indica a continuación el diseño de todo este control.
A.- ACONDICIONADORES DEL SENSOR DE FUERZA Y PRESIÓN.
1.- SENSOR DE PRESIÓN (Valar Medido)
De la figura 5.2 de la respuesta del sensor y
aproximando a una recta se tiene la figura 4.35.
-*~- X
FIg. 4.35 Aproximación lineal de larespuesta del sensor de presión.
4.57
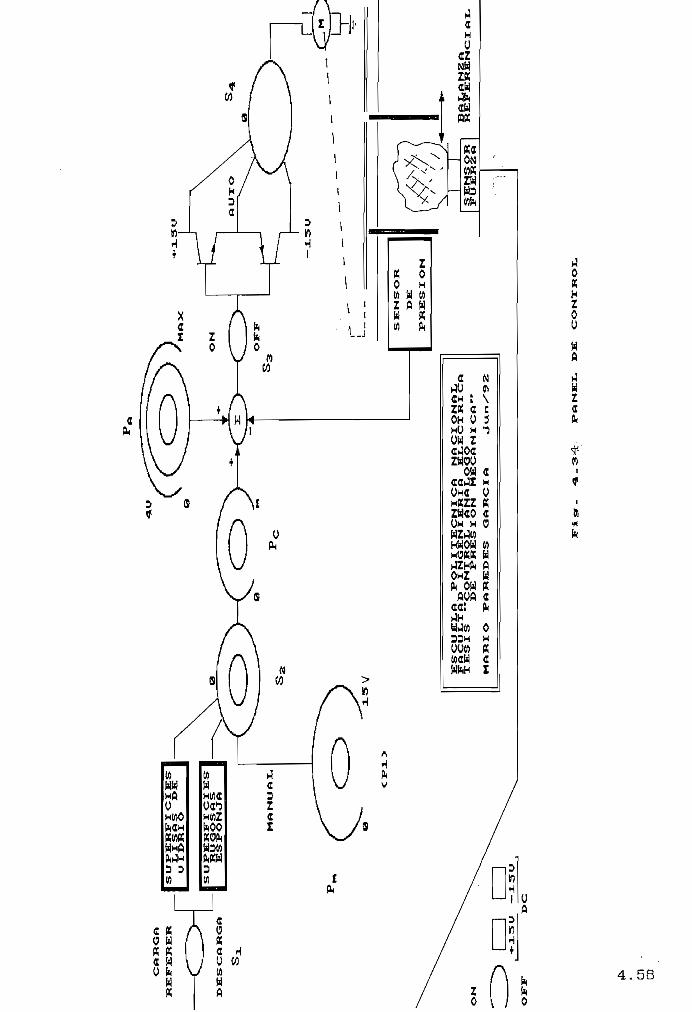
4.58

donde:V
= 1-85 [V/mm] (4.7)
Cabe anotar también que la salida máxima del sensor
de presión es 13 V.
2_- SENSOR DE FUERZA (BALANZA) - (VALOR REFERENCIAL)
Para rango automático:
La salida del sensor de fuerza (balanza) se Indica
en la figura 4.36 donde la curva\Ohay que acondicionarla
a fin de que sea semejante a las curvas (2j (sensor de
presión) ya sea para cuerpos lisos o rugosos.
L. Vidrio
Rugoso esponja
W
FIg. 4.36 Rango lineal de la respuesta delSensor de Fuerza y Sensor de Presión
De esta manera la balanza proporciona el valor
referencial para sostener un cuerpo de características
4,59
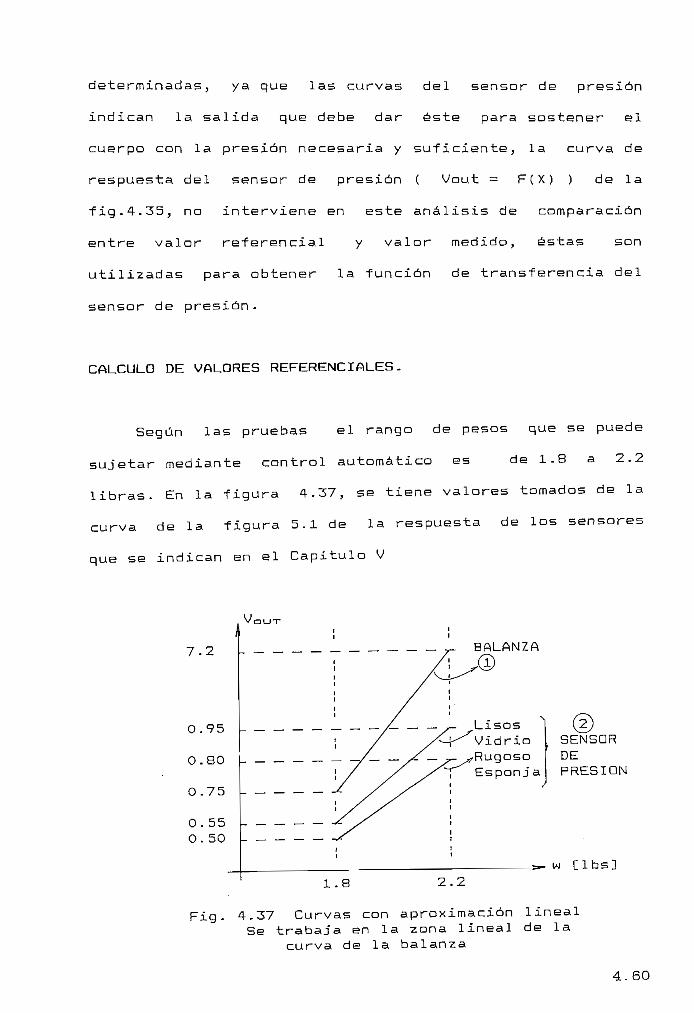
determinadas, ya que las curvas del sensor de presión
indican la salida que debe dar éste para sostener el
cuerpo con la presión necesaria y suficiente, la curva de
respuesta del sensor de presión ( Vout = F(X) ) d é l a
fig.4.35, no interviene en este análisis de comparación
entre valor referencial y valor medido, éstas son
utilizadas para obtener la función de transferencia del
sensor de presión.
CALCULO DE VALORES REFERENCIALES.
Según las pruebas el rango de pesos que se puede
sujetar mediante control automático es del.8 a 2.2
libras. En la figura 4.37, se tiene valores tomados de la
curva de la figura 5.1 de la respuesta de los sensores
que se indican en el Capitulo V
7-2
0.95
0.80
0.75
O. 55O. 50
BALANZAl)
SENSORDEPRESIÓN
w Clbs]1.8 2.2
Fig - 4.37 Curvas con aproximación linealSe trabaja en la zona lineal de la
curva de la balanza
4.60

A los valores de las curvas del sensor de presión se
aumenta 0.2 V para sostener con seguridad, como ya se
anotó.
7.2
1.15
l.OO
0.750.70
BALANZA•—-.
SENSORDEPRESIÓN
-t~ w Citas]1.8 2.2
Fig. 4.38 Curvas aumentadas A = 0.2por seguridad
A = A 1 + A2 =0.2
donde:
A 1 = seguridad en sujeción.
A 2 = movimiento de las placas.
Con esta modificación las curvas toman los valores
indicados en la figura 4.38.
4.61

Cálculo de ecuaciones (con aproximación a rectas)
BALANZA curvas 1
7.2 - 0.75 Vou-r - 0.75
2.2 - 1.8 W - 1.8
de donde:
Vou-r = 16.12W - 28.5
(4.8)
ÍSensor de Presión.— curvas 2
a) Lisos de Vidrio
1.15 - 0.75 VOLJ-T - 0.75
2.2 -1.8 W - l .B
de donde:
= W - 1.05 (4 .9)
b) Rugosa esponja
1 - 0.70 VQU-T ~ 0.70
2.2 - 1,8 W - 1.8
Vou-r = 0.75W - 0.65 (4.10)
4.62

Los valores de la Balanza deben ajustarse
(coincidir), a los del sensor de presión a fin de que
proporcionen el valor referencial, para lo cual se
realiza a continuación diseños que permitan rotar,
trasladar la curva de respuesta de la balanza a fin de
que coincidan estos valores con los del sensor de presión
(tanto para cuerpo lisos vidrio y rugosos esponja) y
pasen a constituir la referencia del sistema de control;
entonces:
a.— para cuerpos lisos de vidrio se tiene:
Balanza= 16.12W-28.25
S . de presiónVou-r=W-1.05
w [ Ibs]
Se multiplica la salida del potenciómetro balanza
(sensor de fuerza) por Kl = O.196. Para reducir 28.25 V a
un valor menor a 15 V (valor de polarización).
Fig. 4.39 Amplificador con ganancia K = O.196
4.63
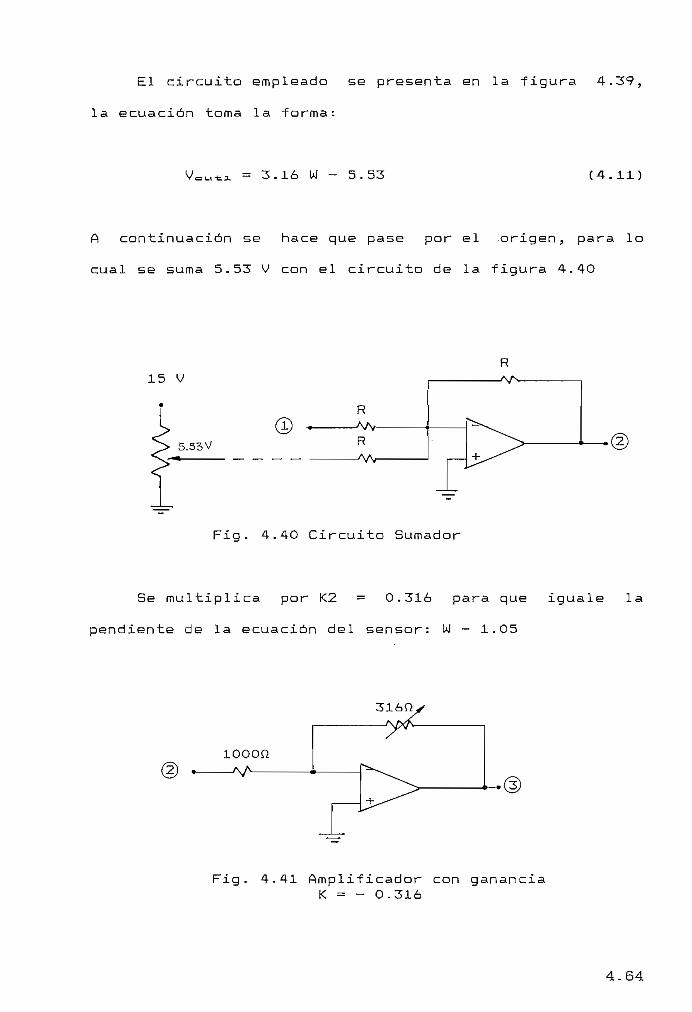
El circuito empleado se presenta en la figura 4.39 ?
la ecuación toma la forma:
= 3.16 W - 5.53 (4,11)
A continuación se hace que pase por el origen, para lo
cual se suma 5.53 V con el circuito de la figura 4.4O
15 V
S.53V
Fig. 4.40 Circuito Sumador
Se muítiplica por K2 = O.316 para que iguale la
pendiente de la ecuación del sensor: W - 1.05
10000
i—(3)
Fig. 4.41 Amplificador con gananciaK = - 0.316
4.64

Hasta aqui se tienen las curvas con los siguientes
valores (iguales pendientes)
BALANZAuti = W
S. PRESIÓNM-t= = W-1.05
-1.05
Se resta 1.05 V a la Balanza para que "se iguale la
curva de ésta a la del sensor de presión. Figura 4.42
-15 V
-1.O5V
Fig. 4.42 Circuito Sumador
Se tiene en consecuencia el siguiente circuito
acondicionador (figura 4.43), para cuerpos LISOS DE
VIDRIO:
4.65

íleon
Fig. 4.43 Circuito acondicionadorpara sostener cuerpos lisos
de vidria
En este diseño completa del acondicionador de la
balanza hay que tener en cuenta los cambios de polaridad
que producen los circuitos amplificadores.
También se incluyen acopladores de impedancia a fin
de na distorsionar los valores provenientes del sensor
cuando éste se conecta al resto del circuito.
b. Para cuerpos rugosos de esponja
Procediendo de igual manera que en el cálculo (a) se
tiene:
o.= 16.12W-28.25Balanza
Vou-r=0.75W-O.Ó5S. de Presión
w [Ibs]
•é 4.66

iSe multiplica la salida del potenciómetro de la
balanza por Kl = O . 196 (para reducir b a un valor de 15
Voltios), con ayuda del circuito de la figura 4.44.
De manera similar al caso anterior:
Rl
Rlnoon
i—(1)
Fig. 4.44 Amplificador con gananciaK = 0.196
la ecuación queda:
V outl = 3.16 W 5.33
Ahora se hace que pase por el origen, para los cual
se suma 5.53 V, figura 4.45.
15 V
5.53 V
Fig. 4.45 Circuito Sumador
4.67

Hasta aquí coinciden los mismas circuitos del caso
anterior. Ahora se multiplica por K2 = O.237 para que
iguale la pendiente de la ecuación del sensor : 0.75 W —
0.65. Figura 4.46
237Q-
1000Q
Fig. 4.46 Amplificador con gananciaK = - 0.237
Hasta aquí las curvas tienen la forma:
-0.65
BALANZA
S. PRESIÓNeuita = 0.75W - 0.65
Restando 0.65 V a la balanza para que iguale la
curva de ésta a la del sensor de Presión. Figura 4.47
4.68

-15 V
-0.65 V
Fig. 4.47 Circuito Sumador
NOTA: Todos estos cálculos y circuitos,tanto para cuerpos
lisos de vidrio, como para rugosos sirven para diseñar el
acondicionador de la balanza para control automática .
Sólo se manipula (acondiciona) la señal de la balanza
(que proporciona una salida en función del peso). Las
ecuaciones del sensor de presión guian en el cálculo de
las referencias que debe proporcionar la balanza.
ÍÍOOQ15 V
Fig. 4-48 Circuito acondicionadorpara sostener cuerpos rugosos
de esponja
La figura 4.48 indica el circuito para cuerpos
rugosos de esponja.
4.69

CIRCUITO DE MEMORIA REFERENCIAL.
Se Intercala a la salida de la balanza el siguiente
circuito que mantiene en memoria el voltaje de salida de
la balanza, es decir, ayuda a mantener una referencia
fija en cada operación de sujecion.Este circuito se
Indica en la figura 4.49
BALANZA ACOPLAD
ACOPLAD. IMP
Fig . 4.49 Circuito de memoria referenclal
Operación:
Cuando el switch está en C, el condensador se carga
al Vout de la balanza y almacena este valor referencial
mientras transcurre el proceso de ajuste, tanto el diodo,
como el acoplador de Impedancias ayudan a mantener con
carga el condensador C un mayor tiempo. Para descargar C
se coloca switch en DC y queda listo el circuito para
otro ciclo de ajuste. SI el valor almacenado en C es de
un valor elevado se puede Intercalar una resistencia de
descarga y evitar que se produzca "chispa".
4.70
Hasta este punto están diseñados los acondicio-
adores del sensor de fuerza (balanza), los mismos que
como se indico anteriormente; son encargados de procesar
la señal del sensor y proporcionar a la salida un valor
referencial (semejante a los valores de la curva del
sensor de presión), para que se produzca el ajuste
necesario y suficiente.
Por recomendaciones del fabricante se deben emplear
los circuitos indicados en el anexo Cj tanto para
sumadores, inversores, acopladores.
CIRCUITO DE CONTROL TOTAL.
Tomando en cuenta las etapas explicadas
anteriormente, circuitos prácticos,valores standard de
elementas existentes en el mercado, switche, selectores y
potenciómetros de calibración tanto internos como
externas se tiene el circuito total de control de la
figura 4.50
4.71
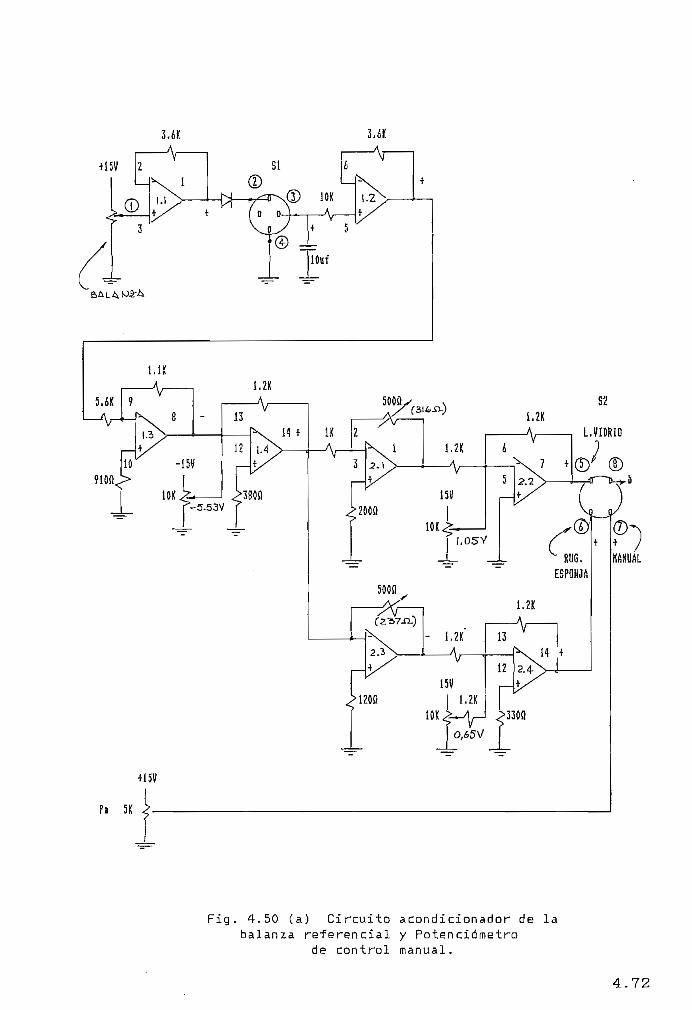
tiüV
S2
Pi 5K
Fig. 4.50 (a) Circuito acondicionador de labalanza referencia! y Potenciómetro
de control manual.
4.72

b) DISECO DEL POTENCIÓMETRO DE CALIBRACIÓN PC
El potenciómetro Pe tiene como finalidad elevar en
aproximadamente 37 por ciento el valor referencial
proveniente de la balanza o potenciómetro manual, es
decir que una vez paralizado el servo en la operación de
ajuste, y si ésta no se a efectuada en su totalidad 7 al
mover el potenciómetro Pe se logra un movimiento lento
del servo y de esta manera se ajusta aun más el cuerpo,
garantizando su sostenimiento.
Con Pe de 5 KQ (calibrado el cursar al mínimo)
22Ganancia = = 1.04 ~
16+5
Con Pe -> O Kft (máximo valor)
22Ganancia = . = 1.37
16
Por lo tanto se debe elevar como máxima 37 "/.. Luego
de esta etapa hay que añadir un inversor y un acoplador
de impedancias, figura 4.50 (b), y esta salida a entra al
punto sumador.

3.¿KQ
eleva referencia en 3? I inversor acoplador de
iipedancia
Flg. 4.50 (b) Circuito de calibración dela referencia en un 37 7. adicional
c). ACONDICIONADOR DEL SENSOR DE PRESIÓN.
Este proporciona el valor de realimentación o valor
medido y par condiciones del circuito total hay que
Invertir su señal y emplear un acoplador de Impedanelas;
tal como se indica en la fig. 4.50 c.
15 V
3.6KQSensor dePresión
1.2KO
6
5.
J>^14
Flg. 4.50(c) Circuito acondicionadordel sensor de Presión
4.74

d) -DISECO DEL POTENCIÓMETRO DE CALIBRACIÓN
Este potenciómetro de calibración PA permite la
variación del valor A muerto (que es mínimo necesario
para mover el servomecanismo). Este valor según
mediciones de la tabla 5.8 debe ser de 4 V
aproximadamente; entonces con el potenciómetro PA se
puede elevar ó disminuir este valar.
Nótese que con esta calibración se varía la salida
del punto de suma (error), se produce un efecto semejante
al variar el valor referencial con Pe. Para operación
normal del equipo este potenciómetro estará calibrada en
4 V.
La salida de este potenciómetro va a un acoplador
de impedancías antes de ingresar al punto de suma. Conse-
cuentemente se tiene el circuito de la figura 4.50 (d)
15 V
va al sumador
Potenciómetro Acoplador de
de calibración impedancias
Fig. 4.50 (d) Circuito decalibración de A
4.75

e). DISECO DEL SUMADOR O DETECTOR DE ERROR.
-f-
-s—( 2 ] . «e— error
Fig . 4.50 (e) Punto de Suma
Se cumple la relación
error = V^eF- ~ v MED "*" A MUERTO
Constituye el punto donde llegan: el valor
referencial , valor medido, y A muerto; de la comparación
(suma) de estos valores se obtiene la señal de error que
alimenta el amplificador del servomotor, según indica la
figura 4. 50 (e) .
Electrónicamente es un circuito sumador (de ganancia
1 ) con amplificador o pe ración al que se indica en la
figura 4.50 (f ) .
donde:
— ~ ( VREF^ ~ VMED + MLJERTD ) (4.13)
4.76
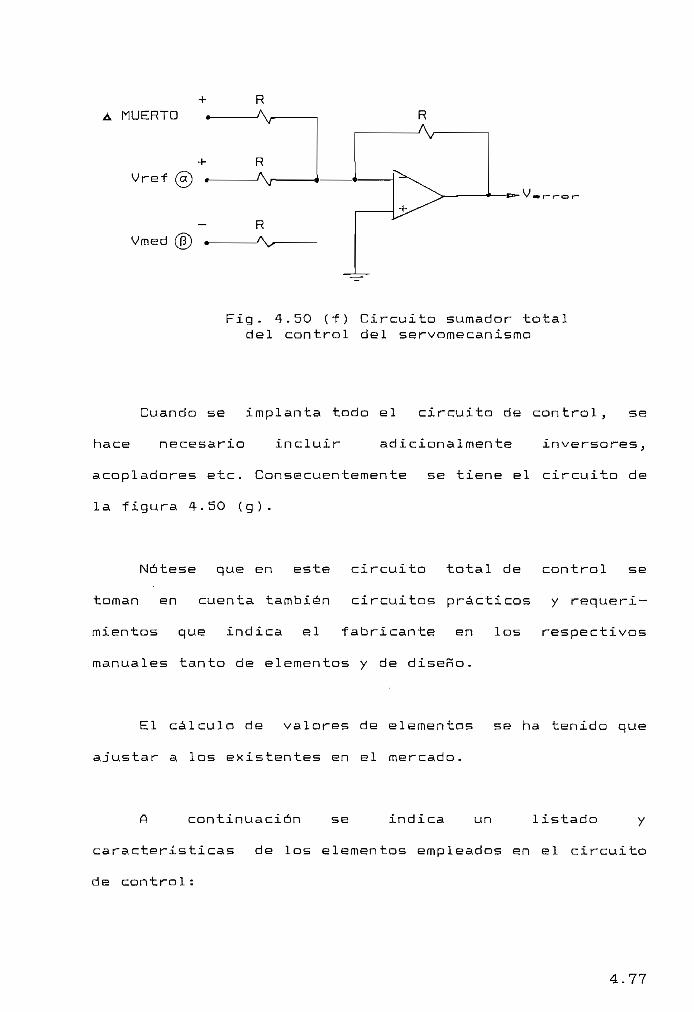
-t-A MUERTO
Vref
Vmed
FIg. 4.50 (f) Circuito sumador totaldel control del servomecanismo
Cuando se implanta todo el circuito de control, se
hace necesario incluir adicionalmente inversores,
acopladores etc. Consecuentemente se tiene el circuito de
la figura 4.50 (g).
Nótese que en este circuito total de control se
toman en cuenta también circuitos prácticos y requeri-
mientos que indica el fabricante en los respectivos
manuales tanto de elementos y de diseño.
El cal culo de valores de elementos se ha tenida que
ajustar a los existentes en el mercado.
A continuación se indica un listado y
características de los elementos empleados en el circuito
de control:
4.77

''•SSL
3.6KÍI
aipl i f icador{Je potencia
Suiador detector de error inversor acoplador de
iapedancias
15 V
S3
-V
-\
Fig. 4.50 Cg) Circuito sumador , detector deerror y ampl i f i cador de potencia
4.78

- Circuito integrado EC6 948; que contiene cuatro
amplificadores operacionales, polarizado con +15 Vdc
y -15 Vdc, y compensación interna de offset.
- Resistencias de: 3.6, 10, 5.6, 1.1, 0.910, 1.2, 1,
0.200, 0.380, 0.120, 5, 16, 22, 0.620, 3.6, 3 Kft; y
con una tolerancia de 4- 5 "/., y una disipación máxima
de 1/2 W-
— Diado rectificador.
- Condensador de 10 micro faradios.
- Potenciómetros de calibración de 5 Kfi
— Switch y selectores.
INTERCONEXIONES DEL CONTROL CON LOS DEMÁS ELEMENTOS
En este punto se analiza como se enlazan (conectan)
el circuito de control, fuente de alimentación, sensores
de presión y fuerza, elementos de control exterior
(switches, selectores), fusibles de protección,
amplificador de potencia, servomotor, etc.; para formar
todo el servomecanismo con control de presión mecánica.
La figura 4.51 indica por bloques la interconexión
de estos elementos.
4.79

Hontaje en servoflscanisto 7
Fusibles de
Protección
Kontados enE ó di; lo de control
ftfiPLIFICADÜR
BE POTENCIA
BftLftHZft REFERENCIA!.
(S. DE FUERZA)
CIílCÜITOS DE CüHTKBL
(TftWETA ELECIROHICfi)
JL
ELEHEHTQS DE
COHTROL EXTERIOR
Panel frontalde control
Fig. 4.51 Diagrama de bloques deInterconexión del servomecanismo
Básicamente se tienen dos partes principales:
4.80

1Q SERVOMECANISMO
El Servomecanismo contiene en su interior:
— servomotor
— amplificador de potencia
— fusibles de protección
— switche de fin de carrera
- balanza referencía1 (sensor de fuerza)
- placas de sujeción (sensor de presión)
29. MODULO DE CONTROL
Este módulo se compone de:
a. Internamente:
- fuente DC
- fusibles de protección
~ circuito total de control ( circuito impreso)
b. Exteriormente.
- switche ON - QFF
- luces piloto
- interruptores
- selectores
- potenciómetros de calibración
4.81
wEstos elementos van instalados en la parte
frontal del panel de control.
Como se aprecia en la figura 4.51 debe existir un
BUS de cables de conexión entre la caja de control y el
servomecanismo, asi como también entre todas las etapas
internas del panel de control, los mismos que se detallan
en los anexos A.4.1 (a) y (b).
Todo el servomecanismo funciona con una alimentación
normal de 120 V AC.
PROTECCIONES.
Incluye las siguientes
— Fusibles de 1 A, que protegen todo el circuito de
control a través de la fuente de alimentación AC/DC.
- Fusibles de 0.5 A, que protegen el amplificador de
patencia; desactivando éste y protegiendo los
transistores al existir alguna falla (sobrecarga del
servomotor o corto circuito en el amplificador).
- Switche de fin de carrera, estos dejan fuera de
servicio al amplificador de potencia cuando la placa
de sujeción se abre más allá del punto máximo, o se
* 4.82

cierra menos del mínimo. Ya que de no existir esta
protección se sobrecargaría el servomotor.
DISECO Y CONSTRUCCIÓN DEL CIRCUITO IMPRESO
Una vez probado el funcionamiento del circuito de
control, amplificador de patencia fuente AC/DC.,etc.? se
procede al diseno de la tarjeta electrónica o circuito
impreso, para lo cual se emplea el computador con el
programa SMARTWORK, que es la base fundamental en este
diseño.
Dada la gran densidad y para dar facilidad en la
construcción se diseña y construye la tarj'eta electrónica
de doble lado que se Indica en el anexo F.
4.4.3 FUENTE DC: DISERÍO Y CONSTRUCCIÓN.
El servomecanismo que se construye necesita
suministro de energía para el servomotor (planta) y para
el sistema de control.
De las mediciones realIzadas de requiere los
siguientes valores aproximados:
- Servomotor (planta); + 12 Vdc 0.4 A
- Sistema de control: + 15 Vdc 0.1 ñ
4.83
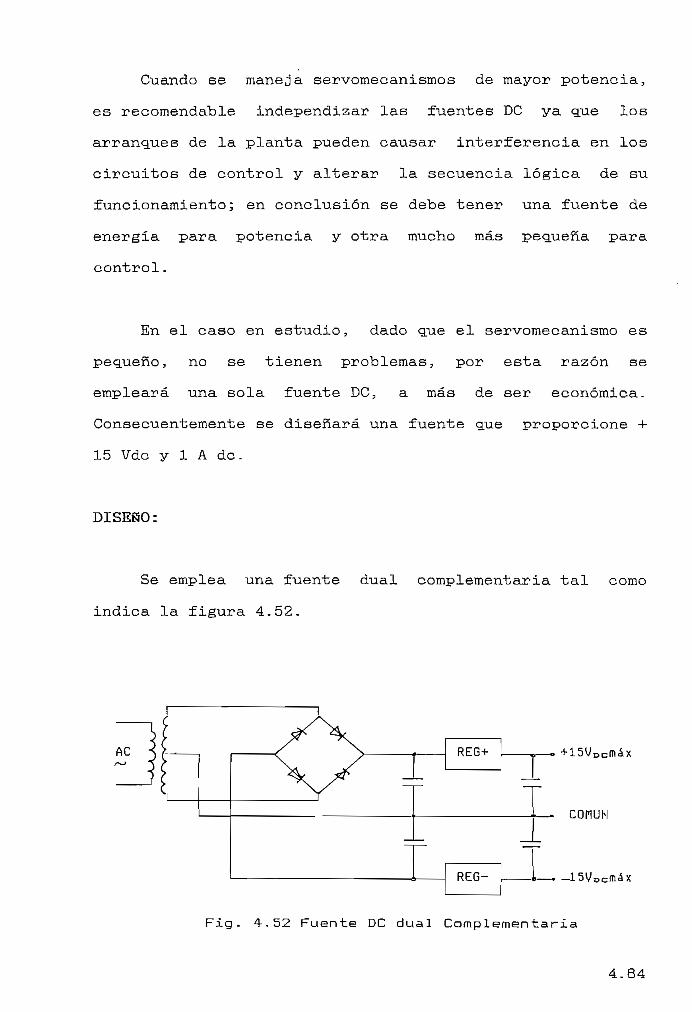
Cuando se maneja servomecanismos de mayor potencia,
es recomendable independizar las fuentes DC ya que los
arranques de la planta pueden causar interferencia en los
circuitos de control y alterar la secuencia lógica de su
funcionamiento; en conclusión se debe tener una fuente de
energía para potencia y otra mucho más pequeña para
control.
En el caso en estudio, dado que el servomecanismo es
pequeño, no se tienen problemas, por esta razón se
empleará una sola fuente DC, a más de ser económica.
Consecuentemente se diseñará una fuente que proporcione 4-
15 Vdc y 1 A de.
DISESO:
Se emplea una fuente dual complementaria tal como
indica la figura 4,52.
Fig . 4.52 Fuente DC dual Complementaria
4.84

Se emplean reguladores a la salida a fin de no tener
mayores variaciones del voltaje.
Salida: + 15 VDC 1.0 AAC
Entrada: nominal: 120 V^cnom 100 V^c min-
130 V AC máx.
Entonces:
= ± 15 V de
— 3 V (caída de voltaje en el regulador)
= 1-2 V (0.6 V caída de cada diodo)
= 0.75 V (1.5 Vpp).
El voltaje que debe suministrar el transformador es:
VQUT + Vf^ecs + V
. (4.14)0.92
donde :
O . 92 representa la eficiencia típica del
rectificador (pérdida de aproximadamente el 87. )
in relación entre voltaje nominal AC y vol taje
mínimo de línea.
4.85
JP W
I/ 2 constante para obtener valor RhS.
Reemplazando los valores Indicados se tiene:
15 + 3 + 1.2 + 0.75 120 1= 18.4 V
0.92 100
Por condición de elevación de voltaje se tiene que
x 1S.4 V (4-- 15)V
130. x 18.4 V = 23.9 w 24 V
100
** Debido a la elevación de voltaje de línea, se
incrementa el voltaje en los capacitores del filtro,
lo que puede impedir una futura conducción.
Corriente requerida en el secundario:
IftC — 1.8 loe OUT (4.16)
donde :
se recomienda un factor de 1.8 para rectificador de
onda completa ? con filtro capacitivo, salida tanto
positiva como negativa.
4.86

Muí Consecuentemente, se requiere un transformador de 48
V AC. con TAP central y 1.8 A RMS.; lo que da como
resultado una potencia aparente de 86 VA. Normalizando,
se recomienda un transformador de 100 VA-
SELECCIÓN DEL CAPACITOR DE FILTRO.
En nuestro caso la corriente de salida IL es:
IL < 1A
entonces el capacitor viene determinado por:
C - x 6 x 10"3 (Faradios) (4.17)AV
donde : Ii_ = corriente de carga
AV = voltaje de rizado pico — pico.
para este caso:
I u. = 1 A
AV = 1.5 V
reemplazando los valores indicadas se obtiene que:
C = 4000 uf / 20 V
4.87
Los diodos deben soportar al menos dos veces la
corriente de salida.
Se emplean a la salida dos reguladores ( uno
positivo y otro negativo), con el objeto de tener fijo el
voltaje de salida.
SELECCIÓN DE COMPONENTES.
Para seleccionar los elementos que forman la fuente,
se toma como base los datos obtenidas en el diseño, y
además se pretende utilizar elementos existentes. Nótese
que aunque en algunos casos éstos no cumplen exactamente
con las características del diseño ya que al no ser éstas
fundamentales, estos elementas bien sirven para nuestra
propósito netamente experimental.
* Transformador
Diseño real
48 V AC. 24 V AC.
1.8 A RMS. 1.5 A RMS.
El transformador empleado tiene datos menores a los
calculados, pero experimentalrnente sí abastece nuestras
necesidades sin sufrir elevaciones de temperatura.
4.88
* Puente rectificador :
ID £. 2 1 OUT
I d > 2 x 1
Id > 2 A.
Se empleará el puente ECG 5309 que soporta 4 A y
una tensión de pico inverso de 100 v".
* Filtros:
Se emplean capacitores electrolíticos.
Diseño real
4OOO uf / 20 V 2200 uf / 35 V
* Reguladores de voltaje
Por tener en existencia se emplean dos reguladores
de voltaje variables : ECG 956 y ECG 957, cuyas caracte-
rísticas y circuito de conexión constan en el anexo 4.3.
Nótese que es de fundamental importancia el empleo
de disipadores de temperatura para los reguladores de
voltaje. Además se intercala en la circuitería dos LED
(uno para voltaje positivo y otro para negativo)., estos
proporcionan una información visual de la operación
normal de la fuente.
4.89

CIRCUITO TOTAL :
La figura 4-53 indica el circuito práctico total de
la fuente regulada.
ci2200 uFT35V ^Dl qiüf
j:2200 uF35V
-"•! C¿3R1 ¿iuf
+ 15 VD
P2V5CO
1200
C6luí
.- 15 V»
Fig. 4.53 Circuito de fuente regulada DC± 15 VDC 1 A
En el literal 5.1 se indica tablas de valores
obtenidas al hacer pruebas con la fuente DC.
4.5 CONSTRUCCIÓN Y ENSAMBLAJE TOTAL.
En los numerales anteriores de este capitulo ( 4.1,
4.2, 4.3, 4.4 ) se diseña y construye cada uno de los
componentes que constituye el servomecanismo, ahora en
esta sección se indica como se arman o interconectan
tanto las partes mecánicas asi como los componentes
electrónicos de control y switche de mando.
4.90

El diagrama de bloques de la fig. 4.54 índica corno
se ínterconectan tanto mecánica como eléctricamente los
diversos bloques.
SERVOMECANISMO
ENTRADA
120 Vac
brazo de sujeción
— fusibles de protección a. p,
- amplificador de potencia
— switches de fin de carrera
— placas de sujeción
— sensor de presión
soporte del equipo
— soporte metálico
— sensor de fuerza
(balanza referencial)
módulo de control
- fuente AC/DC ± 15 Vdc
- fusibles de protección
- tarjeta de control
— switenes, selectores demando y control
— luces piloto
Fig. 4.54 Diagrama de bloques deinterconexión del servomecanismo
4.91

En esta figura se observa que tanto el brazo de
suj" eción como el soporte, forman un solo conjunto / la
información eléctrica proveniente del sensor de fuerza
pasa al módulo de control a través del brazo de sujeción
(solamente por disposición de elementos).
ftl brazo de suJeción llegan + 1 5 V D C . y todas las
señales de control provenientes del módulo de control.
Las señales provenientes del sensor de presión y
fuerza 7 van directamente a la tarjeta electrónica
ubicada en el módulo de control; ésta procesa la
información y envía una señal de error al amplificador de
potencia ubicado en el brazo de sujeción.
Consecuentemente la información entre módulo de
control y servomecanismo fluye en las dos direcciones.
La interconexión entre bloques emplea una cinta
muíticonductora flexible .
El anexo A.4.1 (a) y (b) muestra un esquema más
detallada de la interconexión eléctrica (líneas de señal
de control y fuerza ).
El panel de control indicada en la figura 4.343 está
ubicado en la parte frontal del módulo de control y
consta de los siguientes elementos:
4.92

- Switch general ON- OFF , que conecta o
desconecta todo el servomecanismo.
- SI, interruptor que almacena el valor
referencial proveniente de la balanza (en
control automático).
— 32., selector de referencia de 4 posiciones:
1. posición "O" apagado
2. AUTOMÁTICO,, para sujetar cuerpos de
superficies lisas de vidrio.
3. AUTOMÁTICO, para sujetar cuerpos de
superficies rugosas de esponj'a.
4. referencia MANUAL.
— PM, potenciómetro exterior de calibración
manual del valor referencial.
- PC, potenciómetro exterior de calibración del
valor ref erencial en aproximadamente un 377.
adicional.
- PA? potenciómetro exterior de calibración del
valor AMUERTO., desde O a 15 V ( hay que
calibrarlo en 4 V.).
4.93

¿K.
53, Switche ON- OFF del Amplificador de
Potencia, éste permite el paso de la señal de
error hacia este amplificador una vez que todos
los pasos de control anteriores se han
realizado .
54, selector de 4 posiciones que conecta la
salida del Amplificador de Potencia con el
servomotor :
1 . posición "O" apagado
2. posición +15 V DC , permite accionar el
servomotor y cerrar las placas .
3. AUTOMÁTICO, en esta posición se permite
alimentar el servomotor con un voltaje
variable en función de la señal de error.
En esta posición se cumple el " control
análogo de presión mecánica" .
4 . posición de - 15 v" DC que permite accionar
el servomotor y abrir las placas de
a j us te .
4.94

4.6 MEDICIÓN DE PARÁMETROS Y FUNCIÓN DE TRANSFERENCIA DEL
SISTEMA CONSTRUIDO-
4.6.1 OBJETIVO DE LA MEDICIÓN DE PARÁMETROS REALES.
El servosistema, está formado de partes ya
*gi, construidas de antemano (servomotor, engranaj es,
tornillo), y de otras que se las construyen en base a los
requerimientos de las primeras.
De ahí que es necesaria e importante tener datos
numéricos reales acerca de su respuesta , es decir
obtener las funciones de transferencia reales de todas
las partes constitutivas, y con este antecedente proceder
al diseño del control y demás etapas de acoplamiento, y
acondicionamiento que formará luego todo este
servomecanismo.
Se medirán datos en las siguientes partes o piezas.
- servomotor
- engranajes
- tornillo sin fin - placa deslizante
— sensor de presión (valor medido)
— sensor de fuerza (Valor referencial)
— amplificador de potencia
— conjunto: motor— engranaj'es- placas.
4.95
Los detalles y procedimientos de mediciones se
explican detalladamente en el Capitulo V; en el presente
se indican los datos finales de estas mediciones.
4.6.2 MEDICIONES DE PARÁMETROS REALES
a).— Servomotor
Datos de placa:
— servomotor DC
— control por armadura
— campo de imán permanente
- V DC - 12 V. I DC = 0.3 A.
Las mediciones siguientes son válidas para el
servomotor más el sistema de engranajes, tornillo sin
fin ; es decir de toda la planta.
A continuación se indican mediciones de voltaje y
corriente máxima y mínima del servomotor, así como
también el voltaje mínima necesario que requiere el
servomotor para mover el mecanismo (tomadas de la tabla
5-6). Este dato es importante para determinar la zona
muerta.
4.96

Vmáx = 14.78 Voc
Vmín. =3,5 VDc
Vmin. = 3.9 V0c
máx - O.54 A
m¿n = O.38 A (al disminuirel voltaje)
min = 0.41 A ( al subir elvoltaje)
Analizando estos datos (figura 4.55) se tiene una
histéresiSj cuando el motor ya está en movimiento y se va
disminuyendo el voltaje, éste resulta ser menor que el
requerida para iniciar el movimiento al incrementar el
voltaje desde cero? lo cual es lógico,, ya que se debe
vencer la Inercia de todo el servomecanismo.
W
.v
curva realal disminuirel voltaje
3 5 3 9Vamiri SUBIR
BAJAR
curva teórica
curva realal subir elval taje
V
FIg . 4.55 Variaciones de velocidadal vaciar el voltaje de armadura
del servomecanismo
Se cumple que:
Vamio SUBIR VOLTAJE > Vamiri BAJAR VOLTAJE
3.9 V > 3.5 V
4.97
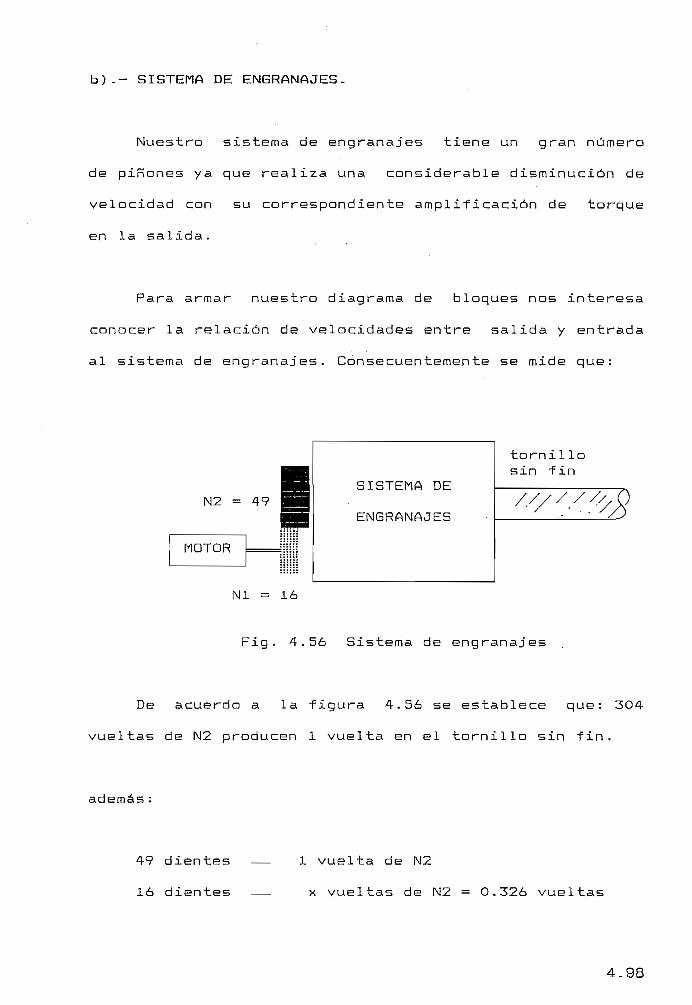
b ) _ - SISTEMA DE ENGRANAJES.
Nuestro sistema de engranajes tiene un gran número
de piñones ya que realiza una considerable disminución de
velocidad con su correspondiente amplificación de torque
en la sal ida.
Para armar nuestro diagrama de bloques nos interesa
conocer la relación de velocidades entre salida y entrada
al sistema de engranajes. Consecuentemente se mide que:
N2 = 49
MOTOR
SISTEMA DE
ENGRANAJES
tornillosin fin
NI = 16
Fig - 4.56 Sistema de engranaj'es
De acuerda a la figura 4.56 se establece que: 304
vueltas de N2 producen 1 vuelta en el tornillo sin fin.
además:
49 dientes
16 dientes
1 vuelta de N2
x vueltas de N2 = O.326 vueltas
4.98
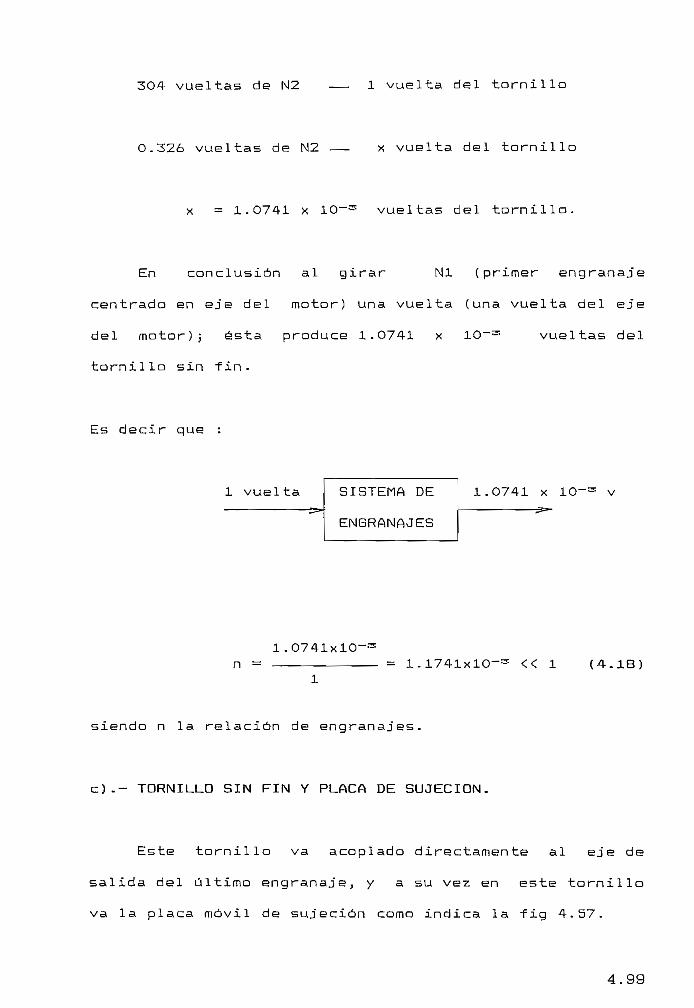
304 vueltas de N2 1 vuelta del tornillo
O.326 vueltas de N2 x vuelta del tornillo
x = l .O741 x vueltas del tornillo.
En conclusión al girar NI (primer engranaje
centrada en eje del motor) una vuelta (una vuelta del ej'e
del motor) ; ésta produce 1. 0741 x 10"31 vueltas del
tornillo sin fin.
Es decir que :
1 vuelta SISTEMA DE
ENGRANAJES
1.0741 x 10~3 v
1.0741X10"3n = . . - 1.1741x10-= « 1 (4.18)
siendo n la relación de engranaj'es.
c).~ TORNILLO SIN FIN Y PLACA DE SUJECIÓN.
Este tornil lo va acoplado directamente al ej'e de
salida del último engranaj"e 7 y a su vez en este tornil lo
va la placa móvil de s u j" ación como indica la fig 4. 57.
4.99

Es decir que el movimiento circular del tornillo sin
fin, se transforma en movimiento longitudinal de la placa
de sujeción.
SISTEMA
líENGRANAJES J™,
tornillo sin fin
uplacamóvil
Fig. 4. 57 Tornillo sin fin y placa de ajuste
En diagrama de bloques se tiene.
F.T.
FT =mm mm
g rados vueltas
mm
rad
Para la medición de esta función de transferencia
se gira 9.95 vueltas del tornillo, y se mide un
4.100
desplazamiento de 1O mm de la placa, la relación de estas
cantidades es la función de transferencia.
FT = O.107 mm/rad (4.19)
d).- SENSOR DE PRESIÓN.
Este es el sensor que detecta la presión ejercida
sobre el cuerpo a través de la placa móvil.
Debido a su construcción física que se detalla en la
sección 4.3.1, éste proporciona un voltaje de salida por
cada milímetro (o fracción) que se desplace la placa
móvil del sensor, es importante anotar que para desplazar
esta placa (cuando se está su j" e tan do los cuerpos) , hay
que comprimir (ej'ercer presión) en el resorte interno del
sensor y además vencer el rozamiento de los contactos
móviles del potenciómetro.
La fig- 4.58 indica la respuesta del sensor de
presión, la misma que toma los datos de la tabla # 3 del
Capitulo V; y realizando una aproximación lineal se
tiene:
10.1 - 2.5£1.85 (4.20)
8 - 4
4.101

Nótese que esta aproximación no afecta el análisis,
al inicio de la curva (fig. 4.58) existe una pequeña
curvatura que frente a todos los valores de la curva es
despreciable. Nuestra zona de trabajo es justamente en la
región lineal de la respuesta del sensor.
10.1
2.5X Cmm]
ZONA LINEAL
Fig . 4.58 Respuesta del sensor de presión
Se realiza otro tipo de mediciones que se Indican en
la figura 5.3 y su correspondien-te tabla de valores # 4
y 5 del Capitulo V; las cuales Indican el voltaje de
salida de este sensor (presión que ejerce), en función
del peso a sostener y del tipo de superficies en contacto
(coeficiente de rozamiento).
Estas curvas y tabla de valores se utilizan en el diseño
del control de sujeción en lo que respecta al valor
4.102
referencial, y no tiene nada que ver can la curva de la
figura 5.2 empleada para determinar la función de
transferencia.
En estas curvas se aprecia claramente que mientras
disminuye el rozamiento entre las superficies, se hace
necesario ejercer mayor presión para lograr sostener el
cuerpo es decir el sensor de presión proporciona más
voltaje de salida para un mismo peso).
Se tiene una relación directa entre peso y voltaje
de salida del sensor (presión), y a su vez una relación
inversa entre rozamiento y voltaje de salida del sensor
de presión.
e).- SENSOR DE FUERZA
Este, que se lo denominó "Balanza Referencial", y
que a diferencia del sensor de presión, aquí la fuerza es
directa sobre el sensor. Consecuentemente la curva es
única y no interviene el rozamiento.
Este sensor actúa como una balanza, de ahí su nombre
y proporciona la referencia para control automática,
estos detalles de control se explican en el literal
4.4.2.
4.103

Se obtiene la curva de la fig.5.1 (a), y tabla de
valores 5.2; y dado que esta etapa está antes de la
realImentación , no Interviene en el diagrama de bloques
ni en la función de transferencia del sistema.
f)_- AMPLIFICADOR DE POTENCIA
Tomando como referencia la tabla de valares # 5.8 ;
obtenida del amplificador de potencia construido, donde
se obtiene Va = f (Ve ), donde:
Va = Voltaje de salida del amplificador o de
armadura -
Ve = Voltaje de entrada al amplificador o señal
de error.
ZONAAMPLIF.
Va
MUERTADE POTENCIA
RANGO DETRABAJO
f-
-fV'•3 vnin
X
X
Ay
i V(2mif
RANGO DETRABAJO
FIg. 4.59 Respuesta del amplificador de potencia.
4.104

En la f ig . 4.59 se tiene una respuesta lineal tanto
para valores positivos y negativos de Ve ? pero con una
pequeña zona muerta (voltajes pequeños de Ve, donde no
conduce ningún transistor del amplificador).
Se realiza una aproximación al cruce por cero ( —),
donde se tiene una aproximación que difiere del valor
real entre 2.277. a 12.57. en la zona de trabajo positivo y
negativo, la cual es pequeña y no distorsiona nuestra
aproximación de modelo lineal.
Tomando referencia la curva de la fig.5.8 y tabla
5.8 del Capítulo V se tiene la siguiente función de
transferencia para este amplificador:
A = Ganancia =Va
Ve
5.4- 0.9 (4.21)
Ve 0.9 Va
4.105

g)-- CONJUNTO SERVOMOTOR -ENGRANAJES- TORNILLO SIN FIN -
PLACA DE AJUSTE-
ANÁLISIS PARA MEDIR LOS PARÁMETROS DEL SERVOMECANISMO
Como ya se explicó anteriormente, todo este conjunto
estaba armado (y se lo obtuvo como chatarra), todo esto
forma en s¿ el servomecanismo propiamente dicho o Planta,
al cual se lo alimenta con un voltaje de armadura
variable ( que energiza el servomotor) y se tiene como
salida el desplazamiento de la placa de ajuste.
En realidad no interesa los parámetros aislados ya
sea del servomotor, placa,engranajes, e te; sino de todo
el conjunto, consecuentemente la forma de medición de los
parámetros que se indica en el capítulo V proporciona
valores de constantes totales y no por etapas, las cuales
se emplean en el análisis de la siguiente función de
transferencia:
Va(S) 0.0129629
S(9S + 1)
X(S)
FIg . 4. óO Diagrama de bloques equivalentedel servomotor, engranajes, tornillo
sin fin y placas de ajuste
XCS) 0.0129629= . (A.22)
Va(S) S(9S + 1)
4.106

A.6.3 FUNCIÓN DE TRANSFERENCIA DEL SISTEMA CONSTRUIDO.
Tomando como referencia los parámetros reales de las
funciones de transferencia parciales indicadas en las
ecuaciones 4.20, 4.21, 4.22; del sistema ya construidof y
además la metodología de la función de transferencia del
Capítulo II (literal 2.4.1), se tiene los diagramas de
bloques representadas en la figura 4.61 con parámetros
numéricos reales.
*
VrefAMPLIFICADOR
MOTOR - ENGRANAJES
TORNILLO - ETC.
PRESIÓN
Vref +
rO- 0.90.0129629
S(9S + 1)
1.85
Fig . 4.61 Diagrama de bloques real delservosistema Control Análogo de
Presión Mecánica.
4.107

*f
Por tanto:
O.01166661FT = (4-. 23)
9S + S + O.021583
Esta es la función de transferencia real del
servomecanismo "control análogo de presión mecánica (ec.
4.23), su análisis se indica en el Capitulo VI.
4.108

CAPITULO V
EXPERIMENTACIÓN Y RESULTADOS
5.1 PRUEBAS DE LA FUENTE REGULADA
5.2 SENSORES DE PRESIÓN Y FUERZA
5.3 SERVOMOTOR, SISTEMA DE ENGRANAJES
Y PLACA DE AJUSTE
5.4 AMPLIFICADOR DE POTENCIA
5.5 PRUEBAS TOTALES DEL PROTOTIPO CONSTRUIDO

CAPITULO V
EXPERIMENTACIÓN Y RESULTADOS
Se detallan en el presente capítulo las diferentes
experiencias y mediciones que se realizan con los
componentes del equipo ? así como también de todo el
prototipo construido.
Algunas de estas pruebas se han realizado durante el
procesa de construcción y otras en cambio cuando el
servomecanismo está totalmente terminado.
Estas pruebas y mediciones han guiado en el
desarrollo del presente tema de tesis.
El análisis y conclusiones de estas experiencias se
lo efectúa en el Capítulo VI.

Es útil indicar que cada experiencia se la realiza a
manera de práctica de laboratorio donde se plantea:
- un OBJETIVO,
- PROCEDIMIENTO a seguir,
- PRECAUCIONES Y LIMITANTES.,
±. - TABULACIÓN de resultados y gráficos
A continuación se presentan las experiencias
realizadas, y de la manera antes mencionada.
5.1 PRUEBAS DE LA FUENTE REGULADA.
la fuente regulada de voltaje es la primera que se
diseña y construye, ya que con ésta se procederá a
alimentar todos los demás elementos y partes que
constituyen el servomecanismo.
OBJETIVO:
Determinar el rango de variación del voltaje en
vacio y a plena carga de la fuente DC que al imenta
el servomotor.
PROCEDIMIENTO:
- Se alimenta a la fuente con 120 V AC.
— Se varia el potenciómetro de regulación de voltaje
5.2

y se mide a la salida los diferentes valores de Vout
tanto en vacio como en plena carga.
PRECAUCIONES:
Se deben colocar fusibles de protección a la sal ida
de la fuente, tanto en voltajes positivos como en
negativas.
TABLA DE VALORES:
Rangos mínimos y máximos de la fuente:
Sin carga:
lout = O A
Vout DC (+) = 1.2 V min , 17,3 V máx.
Vout DC (-) = -1.2 V min , -17.1 V máx.
Con carga:
lout = 1 A
Vout DC (+) = 1.1 V min , 16.0 V máx.
Vout DC (-) = -1.0 V min , -15.8 V máx.
Rangos nominales de operación para alimentar el
prototipo:
5.3

Sin carga:
lout = O A.
Vout DC ( + ) = 15.95 V
Vout DC (-) = -15.9 V
Con carga:
Iout= 0.8 A y -0-83 A
Vout DC (+) = 15.75 V
Vout DC (-) = -15.6 V
5.2 SENSORES DE PRESIÓN Y FUERZA.
OBJETIVO:
Obtener las respuestas de los sensores cuando éstos
son sometidos a fuerzas y presiones.
PROCEDIMIENTO:
— Sensor de esponja :
Este sensor actúa por un lado como balanza., sobre la
cual se van colocando varios pesos} de a uno por
vez, hasta obtener algunos valores de: Vout = f (
W), donde W es el peso del cuerpo, y el tiempo de
estabilización para cada caso; estos valores se
indican en la Tabla # 5.1(a).
5.4
Por otra lado , el misma sensor sirve como detector
de presión para lo que se lo coloca en la placa de
sujeción y se determina : Vout = f ( peso del cuerpo a
sostener); estos valores san indicados en la Tabla
Sensor de fuerza potenciométrico (balanza).
Como se mencionó en el Capitulo IV, es otro de los
sensores probada, y al igual que en el caso
anterior, se obtiene valares de Vaut = f ( W ) .
Estos valores se indican en Tabla 5.2 y se grafican
en la figura 5.1 (a) .
Sensor de presión poten cióme trico (proporciona el
valor medida )
Se realizan dos tipos de mediciones:
12 se va desplazando el cursar del sensor cada
milímetro y se obtiene: Vout = f(X)f donde X es el
desplazamiento del cursar del potenciómetro.
Es decir se obtiene Vout. como función de la
variación del desplazamiento del cursor del
potenciómetro. También se obtiene Rout = f (X)
5. 5

Para estas experiencias se alimenta el sensor con
+15 V De. Los resultados se tabulan en la tabla #
5.3 y se grafican en la figura 5.2
2P. Pruebas de ajuste para sostener los cuerpos:
¿Se coloca un cuerpo de peso fijo y se va sujetando
lentamente con ayuda de las placas de sostenimiento
hasta que éstas logren sostener al cuerpo con la
presión mínima necesaria.
De estas mediciones se obtiene las valores
iit referenciales que debe tener el servomecanismo.
Esta experiencia se la realiza para 4 tipos de
superficies de cuerpos: superficie lisa de vidrio,
superficie rugosas de esponja, superficies lisas de
plástica y superficies medias.
_L La Tabla # 5.4 y la figura 5.1 ( b) indican estos
datos para superficie de la placa rugosa de esponja.
La Tabla # 5.5 y figura 5.3 (b) indica datos para
superficie de la placa lisas de plástica.
5.6
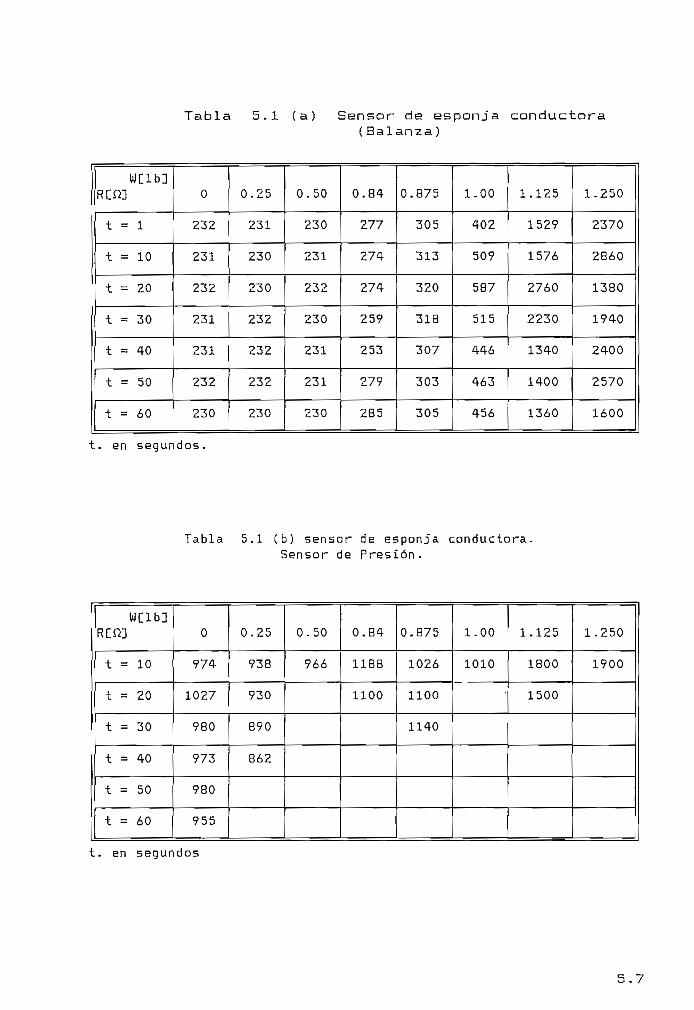
Tabla 5.1 (a) Sensor de esponja conductora(Balanza)
WClb].RCH]
t = 1
t = 10
t = 20
i t = 30
j t = 40
t = 50
t = 60
0
232
231
232
231
231
232
230
0.25
231
230
230
232
232
232
230
0.50
230
231
232
230
231
231
230
0.84
277
274
274
259
253
279
285
0.875
305
313
320
318
307
303
305
1.00
402
509
587
515
440
403
456
1.125
1529
1576
2760
2230
1340
1400
1360
1.250
2370
2860
1380
1940
2400
2570
1600
t. en segundos.
Tabla 5.1 (b) sensor de esponja conductora.Sensor de Presión.
WClb]RCtt]
t = 10
•• t = 20
t = 30
t = 40
t = 50
t = 60
0
974
1027
980
973
980
955
0.25
938
930
890
862
i
0.50
966
0.84
1188
1100
0.875
1026
1100
1140
1.00
1010
1.125
1800
1500
1.250
1900
t. en segundos
5.7

Tabla 5.2 : Balanza Referencial
Peso W [Ib]
00.10.20.30.40.60.81.01.21.41.61.82.02.22.42.62.73.03.3
> 3.3
Vout CV]
0.1870.1870.1860.1860.1850.1850.1720.2090.2800.3500.4060.8402.9507.6008.0008.1408.1708.3008.3308.370
é
Vout. máx. = 8.37 V
5.8

5.9
SUPERFICIES DE CUERPOS:
MEDIASLISAS DE PLÁSTICO
3) LISAS DE VIDRIORUGOSO DE ESPONJA
FIG: S.laJRESPUESTA DEL SENSOR DE FUER-
ZA POTENCIOMETRICO.(BALANZA REFERENCIAL)
b)RESPUESTA DEL SENSOR DE PRE-
SION - PRUEBAS DE AJUSTE PARA
SOSTENER LOS CUERPOS.
PLACAS DE SOSTENIMIENTO RUGOSAS DEESPONJA
-I —6 W(Lbs)

Tabla 5.3 Medic iones de los sensores potenciotnétr icos de 5
X [mm]
0124ó810121416182022242628
Rout [Q]
3.24.072.3
911226035804400450046004600474048004890495049904990
Vout [V]
6.5 mV8.6 Nv
131.6 Nv2.56.2
10.113.113.413.613.914.114.214.214.214.314.3
R a n g o l ineal de t raba jo : 3 mm —> 10 mm
5.10

VO
UT
(V
)
en
F!G
: 5.
2 R
ES
PU
ES
TA
D
EL
SE
NS
OR
P
OT
EN
ClO
ME
TR
iCO
D
E
C5K
_n_)
X'C
mrn
)
X(m
m)
10
20
30
10
20
30
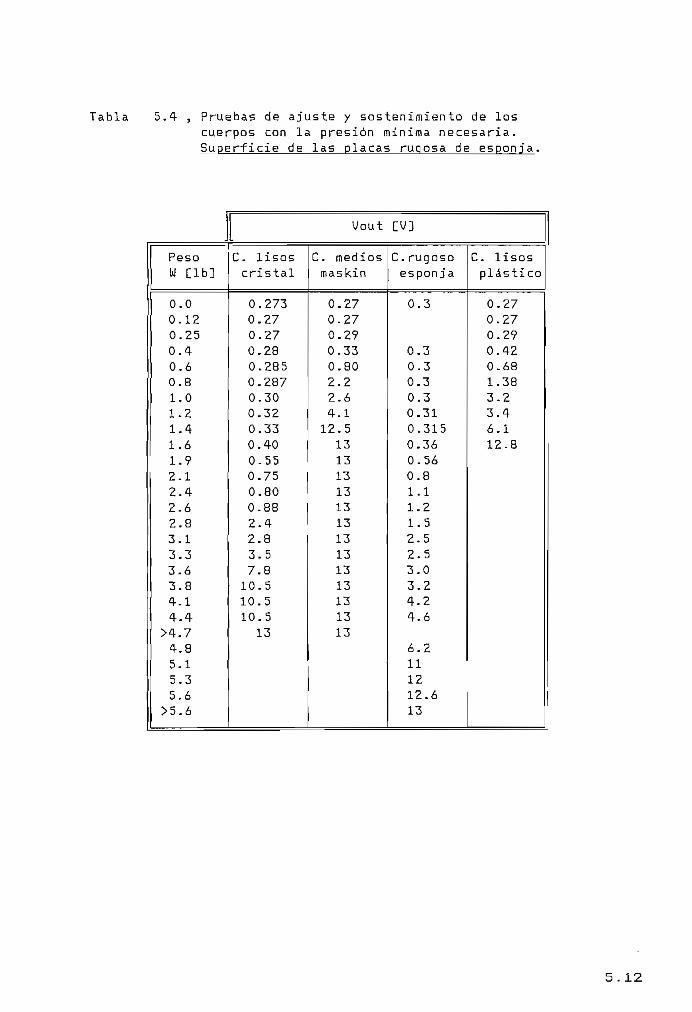
Tabla 5.4 , Pruebas de ajuste y sostenimiento de loscuerpos con la presión minima necesaria.Superficie de las placas rugosa de esponja.
PesoW [Ib]
0.00.120.250.40.60.81.01.21.41.61.92.12.42.62.83.13.33.63.84.14.4
>4-74.85.15.35.6
>5.ó
Vout CV]
rC. lisoscristal
0.2730.270.270.280.2850.2870.300.320.330.400.550.750.800.882.42.83.57.810.510.510.513
C. mediosmaskin
0.270.270.2?0.330.802.22.64.112.513131313131313131313131313
C. rugosoesponja
0.3
0.30.30.30.30.310.3150.360.560.81.11.21.52.52.53.03.24.24.6
6.2111212.613
C. lisosplástico
0.270.270.290.420.681.383.23.46.112.8
5.12
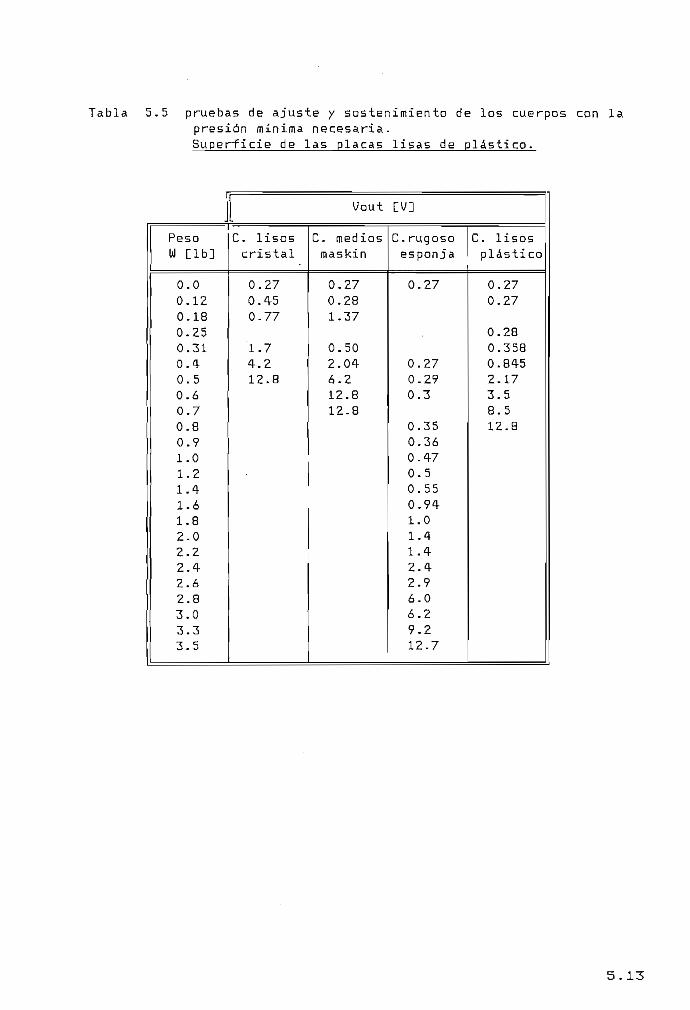
Tabla 5.5 pruebas de ajuste / sostenimiento de los cuerpos con lapresión mínima necesaria.Superficie de las placas lisas de plástico.
PesoW Clb3
0.00.120.18O.Z50.310.40.50.60.70.80.91.01.2
¡ 1.41.61.82.02.22.42.62.83.03.33.5
vout m
C. lisoscristal
0.270.4-50.77
1.74.212.8
C. mediosroaskin
0.270.281.37
0.502.046.212.812.8
C. rugosoesponja
0.27
0.270.290.3
0.350.360.470.50.550.941.01.41.42.42.96.06.29-212.7
C. lisosplástico
0.270.27
0.280.3580.8452.173.58.512.8
5.13

SUPERFICIES DE CUERPOS
MEDIAS
USAS DE PLÁSTICO
LISAS DE VIDRIO
RUGOSO DE ESPONJA
FIG 5.3 a) RESPUESTA DEL SENSOR DE FUER-ZA POTENCIOMETRICO.
(BALANZA REFERENC1AL)
b) RESPUESTA DEL SENSOR DE PRE-SIÓN-PRUEBAS DE AJUSTE PARASOSTENER LOS CUERPOS.
PLACAS DE SOSTÉ'NIMIErüTO USAS DE
PÜASTICO
5.14
5.3 SERVOMOTOR, SISTEMA DE ENGRANAJES Y PLACA DE AJUSTE-
PRUEBA
OBJETIVO:
i. Realizar mediciones de la respuesta de todo el
servomecanismo (servomotor -t- sistema de engranajes +
tornillo sin fin + placa de ajuste) con respecta a
variaciones del voltaje de armadura (Va) que
alimenta el servomotor .
PROCEDIMIENTO:
1. Se alimenta el servomecanismo con un voltaj'e
variable (Va) , desde VamA>( . hasta Vamín . en forma
descendente .
2. Se toman lecturas de Va e la, observando que la
velocidad disminuye desde un valor máxima a un
mínimo.
3. De donde se obtiene cual es el consumo mínimo que
requiere el servomecanismo para mantener su
movimiento, denominando a este valor de Va como
A muerto del servomecanismo.
5.15

Nota: estas mediciones se las toma en vacio y con
carga, es decir,en este segundo caso, cuando las
placas están sosteniendo el cuerpo.
TABLA DE VALORES:
La Tabla 5.6 indica estas mediciones, y la figura
5.4 es su representación gráfica
SIN PRESIONAR LAS PLACAS (VACIO)
VaCV]
laCA]
14.98
0.54
12.00
0.53
9.18
0. 50
6.0
O. 46
5.04
0.44
3.0
0.36
2.59
0.45
CON PRESIÓN DE LAS PLACAS SOBRE EL CUERPO
VaCV]
laCA]
14,98
0. 54
12.00
0. 53
9.19
0.52
6.04
O. 48
5.02
O. 46
3.5
0.38
2.59
0.45
la CA]
0.38
0.36
CON CARGA
SIN GARBA
AMUERTO =3.5 a 3.7X
— Va CV]3.0 3.5
se paraliza elservomotor
Fig. 5.4 Curva de funcionamiento(disminuyendo el voltaje)
5.16

PRUEBA # 2.
OBJETIVO:
Realizar mediciones equivalentes para todo el servo-
mecanismo ( servomotor + sistema de engranajes +
tornillo sin fin + placa de ajuste); con la finali-
dad de determinar la función de transferencia de
este conjunto. Esta representación matemática es la
que se emplea en el literal 4.6.3
PROCEDIMIENTO:
Para encontrar la función de transferencia se
realiza lo siguiente.
Se hace un análisis matemático y se determina la
expresión de salida de este conj'unto en función del
tiempo. Un análisis gráfico de esta respuesta
proporciona la metodología para determinar las
constantes de la función de transferencia.
Se obtiene en forma práctica esta respuesta, para lo
cual se alimenta al servomecanismo con una señal de
FUNCIÓN ESCALÓN y se tornan mediciones del
desplazamiento de la placa de aj'uste en función del
tiempo. Consecuentemente se obtiene datos con los
cuales se puede trazar la curva de respuesta (
5.17

desplazamiento de la placa en función del tiempo),
de donde se obtienen las constantes de la función de
transferencia
DESARROLLO :
ANÁLISIS MATEMÁTICO:
La figura 5.5 representa un diagrama de bloques del
servomecanismo: servomotor + engranaj'es + tornillo
sin fin + placa de a j" usté. La ecuación 5.1 indica la
función de transferencia su función de
transferencia.
MDTOR ENGRANAJE
VaKm
rmS + 1
Wln
W2
v
1
S
-Q-Kx
tornillo -fr- placa
VaKm n Kx
S(TmS
Fig . 5.5 Diagrama en bloques del servomotor -t-en gran a j es 4- tornillo sin fin + deslizamiento
de la placa de ajuste
La finalidad de este procedimiento es encontrar los
valores de las constantes de la función de
transferencia, las mismas que son independientes de
la función de entrada, luego, se asume que la
5.18

entrada es ESCALÓN, para encontrar la respuesta en
función del tiempo.
X(S) K-r-= (5-1)
Va(S) S(TmS + 1)
donde:
K-r- = Km n Kx (5.2)
Ahora, si
VaVa(S) = . —> función escalón de entrada
X(S) Va
Va(S) S SÍT^S -f- 1}
xCt) = VaK-r't - VaK-r'Tm + TmVaK-r'e- rm C 3 - 35 J
cuya respuesta se indica en la figura 5.6.
Las CONSTANTES se encuentran en la siguiente manera:
Dado que el sistema es lento debemos encontrar
prácticamente X = f ( t), para una FUNCIÓN PASO
como entrada. De lo que se obtiene la curva de la
figura 5.6
5.19

luego:
a).— se traza la tangente a la curva cuyo valor es
equivalente a: VaK-r' de donde se conoce Va;
consecuentemente se determina el valor de K-r' .
b).— El corte de la recta tangente a la curva con el
eje de X determina el valor equivalente a la
expresión : — VaK-r'Tm
como se conocen Va y K-r' s se determina Tm.
ó también:
c).- Se traza la tangente a la curva, el corte de
ésta on el eje del tiempo determina rm. El
corte de esta tangente con el eje X determina
el producto : VaK-r' Tm .
ix(t)
pendiente m = VaK-r'
-VaK-r' T
Fig. 5.6 Respuesta del servomecanismoen función del tiempo
5.20

d).- Como se conoce Tm y Va, entonces se determina
el valar de K-r' -
Con lo que se determina el valor de las constantes
de la función de transferencia.
Análisis dimensional:
Del análisis dimensional, resulta que [X (t)] = mm.?
tiene lógica, ya que proporciona una salida del
desplazamiento longitudinal en mm cuando se aplica
en la entrada una señal de voltaje V .
MEDICIONES PARA DETERMINAR LAS CONSTANTES DE LA FUNCIÓN
DE TRANSFERENCIA.
Se mide el desplazamiento de la placa de
sostenimiento en función del tiempo.
Como: V DC vacio = 12.59 V
Va = 12.49 V
t-r = 11.5 minutos ( tiempo total de recorrido)
X-r = 9 .42 cm . (distancia total de recorrida de
la placa)
5.21

de donde se obtiene que la placa recorre 0.81 cm /
minuto, entonces 1 cm. de recorrido de la placa
requiere un tiempo de 1.23 min. Por facilidad
tomaremos mediciones de x(t) cada 1.5 minutos.
Estos datos se indican en la Tabla 5.7 y
representación gráfica en la figura 5.7.
su
Tabla 5.7 Medidas del desplazamientoen función del tiempo x = f(t)
tiempo ( min )
1.5
3.0
4-5
6.0
7.5
9.0
10.5
desplaz . ( cm )
1.06
2.315
3.315
4.72
5.91
7.12
8. 28
De donde se obtiene que para la recta cuya ecuación
es de la forma y = m t + b :
7.12 - 5,91
1. 5= 0.8066
en la ecuación de la recta:
x = mt + b
5.22
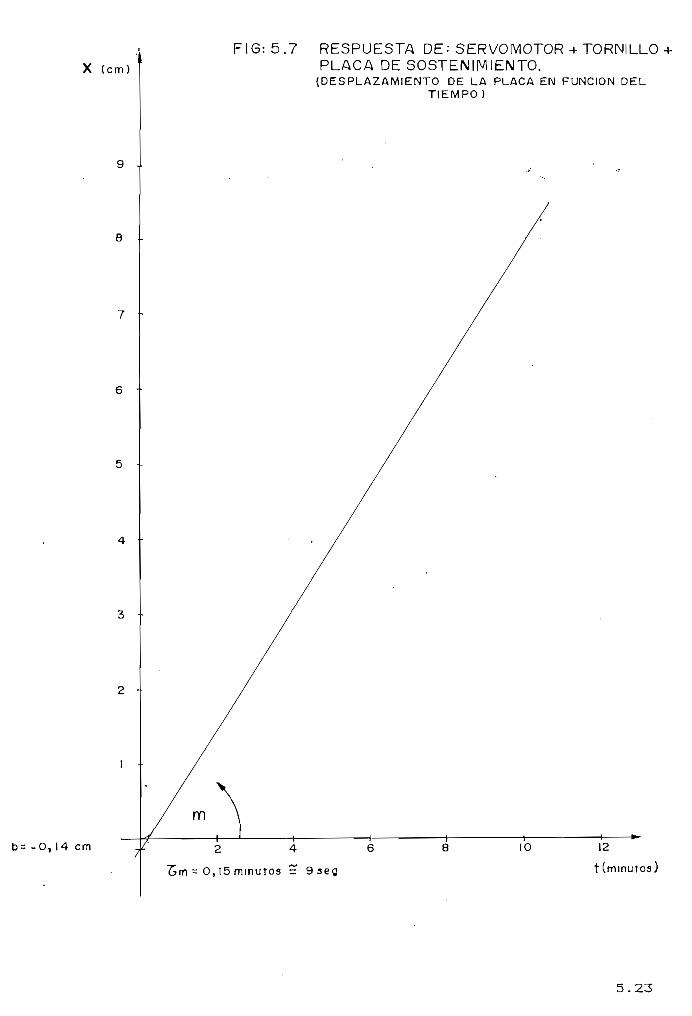
X ícm)
9 - .
8 . -
7 -
5 --
4 -
3 - -
b= -O, 14 cm
FIG:5.7 RESPUESTA DE: SERVOMOTOR + TORNILLOPLACA DE SOSTENIMIENTO.
(DESPLAZAMIENTO DE LA PLACA EN FUNCIÓN DELTIEMPO)
2 4
Z?m = 0,15 m i n u t o s ^ 9seg
10 12
tCmmuTos)
5.23

é-
se reemplaza los valores dados:
7.12 = 0.8066(9) + b , de donde:
b - -0.14 cm
y con este valor de b:
O = 0.8066t - 0.14
t - 9 seg .
Del análisis gráfica de la fig. 5.7 se tiene otra
manera de encontrar Tm:
Tm = 9 seg .
9 seg « 90 seg intervalo de medición.
La primera medición se realiza en un tiempo mucho
mayor que la parte transitoria, es decir, son
mediciones en régimen estable, lo que no interfiere
en nuestro análisis ya que la pendiente de esta
curva es la que determina las constantes..
Para los diferentes cálculos y análisis posteriores
se toma rm = 9 seg.
5.24

ér
AdemáSj de la figura 5.7 se tiene que:
.x(t)
pendiente m = VaK-r'
-^ -VaK-r'
entonces
K-r- = 0.0129629 (mm/seg) / V
Km = 72.27 (rad/seg) / V
(5.4)
(5.5)
constante del motor referida a la
carga (salida)
Va(S) O.0129629
SC9S +1)
X(B)
valores que se toman para el análisis de función de
transferencia:
X(S)
VaCS)
0.0129629
BC9S + 1)(5.6)
que es la función de transferencia de lazo abierto.
5.25

5.4 AMPLIFICADOR DE POTENCIA
OBJETIVO:
Probar el funcionamiento del amplificador de
potencia diseñado y construido en el capitulo IV, y
obtener de esta manera Va = f ( Ve )
PROCEDIMIENTO:
—Se alimenta la entrada del amplificador de potencia
con una señal variable tanto positiva como negativa,
que en este caso constituye la señal d error Ve.
— Se mide la salida del amplificador, es decir la
señal de fuerza Va que alimenta el servomotor.
Todas estas mediciones se realizan con carga, es
decir alimentando el servomotor que mueve todo el
mecanismo.
PRECAUCIONES:
Intercalar fusibles en los colectares de los
transistores de potencia del amplificador y proteger
de esta manera de cortocircuitos y sobrecargas.
TABLA DE VALORES:
Estos valores asi obtenidos se tabulan en la Tabla #
5.8 y su representación gráfica en la fig. 5.8
5.26

Tabla 5.8 Mediciones del amplificadorde potencia
Ve
14.1312.0510.008.096.005.194.564.083.392.742.021.411.070.590.00
- 0.50- 1.01- 1.52- 2.13- 2.51- 2.94- 4.20- 4.96- 5.47- 6.04- 8.15-10.04-12.11-12.55-12.56
Va
12.6810.738.806.864.824.033.402.932.261.650.860.240.010.000.000.00
- 0.001- 0.26- 0.84- 1.24- 1.69- 2.95- 3.71- 4.20- 4.76- 6.81- 8.66-10.69-11.11-11.11
la
0.430.380.300.340.320.280.260.250.280.120.040.000.000.000.000.000.000.050.110.170.230.320.350.370.380.410.420.420.420.42
Pd
0.991.622.232.763.253.293.243.133.183.731.690.590.000.000.000.000.000.731.552.333.063.853.953.993.893.352.661.811.631.63
5.27

•12 --
10 --
APROXIMACIÓNLINEAL
Va
ZONA MUERTA DEL AMPLIFICADOR' DE POTENCIA
FIG: 5,8 RESPUESTA DEL AMPLIFICADOR DE POTENCIA 5.2B

5.5 PRUEBAS TOTALES DEL PROTOTIPO CONSTRUIDO.
OBJETIVO:
Estas pruebas son netamente prácticas a fin de
determinar el funcionamiento total del
servomecamismo y verificar su comportamiento en el
sostenimiento de cuerpos de peso y características
fijas.
PROCEDIMIENTO Y TIPO DE PRUEBAS:
- Se alimenta todo el sistema con 120 V AC.
— Se realizan cuatro tipos de pruebas.
PRUEBA # 1
Medición de los siguientes parámetros:
— distancia total de recorrido de la placa móvil
- 1O cm
- tiempo total de cierre de las placas con Va =
15 Vdc = 9.3 minutos
— tiempo total de apertura de las placas con Va =
-15 Vdc ; = 9.26 minutos.
5'.29

PRUEBA # 2
Control Manual:
Para sostener cuerpos que están fuera del rango
automático? pero dentro de los limites máximo y
mínimo de pesos.
Se pretende sostener los cuerpos con la presión
mínima necesaria.
Este control se lo efectúa con un potenciómetro
manual PM (valor referencial),en el que se encuentra
marcado el valor del voltaje referencial que debe
proporcionar el sensor de presión para sostener los
cuerpos.
PRUEBA # 3
Control Manual para pesos mayores.
De igual manera que el numeral anterior, con la
diferencia que ya no se busca la presión mínima ?
sino que el cuerpo quede sostenido con una presión
mayor (siempre que el cuerpo no se destruya por
exceso de presión).
5.30

Se controla con el mismo potenciómetro Pn anterior
colocado en su punto de calibración máxima.
PRUEBA # 4
Control automática
El cuerpo se la coloca sobre la balanza, ésta
proporciona el valor referencial automáticamente y
el ajuste se produce con la presión mínima necesaria
de acuerdo a las superficies de contacta y al peso
CW) del cuerpo.
CUADRO DE VALORES Y RANGO DE OPERACIÓN.
1Q CONTROL MANUAL
* Rango de pesos ( W ) que puede sostener:
W mín. =2.2 Ibs
W máx. = 4.5 Ibs para cuerpos de superficies
lisas de vidria.
W máx = 5.5 Ibs. para cuerpos de superficies
rugosas de esponja.
5.31

* Mediciones de tiempo de sostenimiento ( desde que
comienza la realimentación hasta que sostiene el
cuerpo).
NOTA: El valor referencial se coloca con el
potenciómetro PN en el que se coloca un valor de
voltaje de acuerda a las curvas de la figura 5.1 b.
2° CONTROL MANUAL PARA PESOS MAYORES
Se prueba que puede sostener pesos mayores a 5.5
Ibs, de cualquier naturaleza de superficie siempre
que estos no sufran daños por exceso de presión.
Peso máximo es 9 Ibs. por seguridad. Pesos mayores
pueden frenar el servomotor, o romper los engra-
najes y o en su defecto doblar o romper las placas
de sostenimiento.
3S CONTROL AUTOMÁTICO
Rango de pesos (W) que puede sostener
W m¿n = 1.8 Ibs
W máx. = 2.2 Ibs.
5.32

• wasMa
iciesrango "Válido -tanto para superf• . ""_ " - - ~-'"•"-." - • ?" -
corfid para superficies rugosas de esponja. ": =
de vidrio
la ; zona común aproximadamente lineal de la
. f i:guT-á 5. i '(a) y . (b) tirito.: pa'ra la bá-laq^a referen —'F ¿*3JF:. • r-, •,-.; . • • • • • • ; " '" - - • : - • " - " "
^ co'mp" para el 'sensor de: presión. - r - :%-

CAPITULO VI
CONCLUSIONES
6.1 ANÁLISIS DE LA FUNCIÓN DE TRANSFERENCIA
REAL DEL SERVOMECANISMO "CONTROL ANÁLOGO
DE PRESIÓN MECÁNICA"
6.2 CONCLUSIONES DE LAS MEDICIONES DEL
CAPITULO V
6.3 EXPERIENCIAS Y COMENTARIOS SOBRE EL
DESARROLLO DEL PRESENTE TEMA DE TESIS.

CAPITULO VI
CONCLUSIONES
En este Capitulo se analizan la función de transfe-
rencia real obtenida en el Capitulo IV, asi como también
los resultados de las mediciones del Capitulo V. Final-
mente se expresan comentarios y sugerencias obtenidas
durante el proceso de desarrollo de la presente tesis.
6.1 ANÁLISIS DE LA FUNCIÓN DE TRANSFERENCIA REAL DEL
SERVOMECANISMO "CONTROL ANÁLOGO DE PRESIÓN MECÁNICA"
Se realiza el análisis numérico real empleando los
parámetros obtenidos en el Capitulo IV

Vref(SAMPLIFIC.
MOTGR-ENGRANAJE-TQRNILLO
XCS)
Fig . 6.1 Diagrama de bloques realdel servomecanismo.
El diagrama de bloques de la figura 6.1 corresponde
a los valares reales determinados en el Capitula IV y V.
donde
* Amplificador de potencia
Va
Ve= 0.9 (4.14)
Motor + engranajes + tornillo sin fin + placa de
sostenimiento
XCS) 0.0129629
Va(S) S(9S+1)(5.6)
sensor de presión
Ksp = 1.85mm
(4.13)
6.2

como :
FT = (6.1)TmB=a + S + K-T-H Ksp
K-r.. = K-r-.K = 0.01166661 mm/seg /V
luego la FUNCIÓN DE TRANSFERENCIA DEL SERVOSISTEMA
"CONTROL ANÁLOGO DE PRESIÓN MECÁNICA" es:
X(S) 0,01166661FT = (6.2)
V(S) 9S=2 + S + 0.0215832285
donde el denominador es un polinomio de segundo grado;
por lo tanto se trata de un SISTEMA DE SEGUNDO ORDEN.
Vref 1
Ksp—i O —^v
,
Ksp. KT'
S (Tm S + 1)
X
ef0.5405 ^c
",
^_^J
0.0215832285
S ( 9 S + 1)
X
Fig- 6.2 Diagrama de bloques del sistemacon realimentaciún unitaria.
6.3

Tomando como referencia el análisis del capitulo II
(2.4.2), y pasando a un sistema equivalente con real i—
mentación unitaria, se tiene el diagrama de bloques de la
figura 6.2 :
donde:
Ksp KT'G(S) =
S(rmS + 1)
como N = 1 , el SERVOMECANISMO ES TIPO 1
Además, de la analogía con £, Tm se tiene:
*W = 0.04897 1/s
C = 1.13 (6.4)
consecuentemente £ > 1 , entonces el SERVOSISTEMA es
SOBREAMORTIGUADO, de ahí que el movimiento del aparatoj&
sea LENTO pero ESTABLE.
ANÁLISIS TRANSITORIO.
Pasando a realimentación unitaria, entonces, como ya
se mostró, se tiene el esquema de bloques de la figura
6.3
6.4

RCS)R' (S)
SHC(S)
Fig.6.3 Esquema general del sistemareal imentada
donde:
R'(S) « (6.5)
Como :
R' (S)
R(S) H
entonces: R(S) = H R'(S)
Tomando como entrada total
1 1R(S) = H = 1.B5 .
De donde} respecto a la figura 6.3 :
6.5
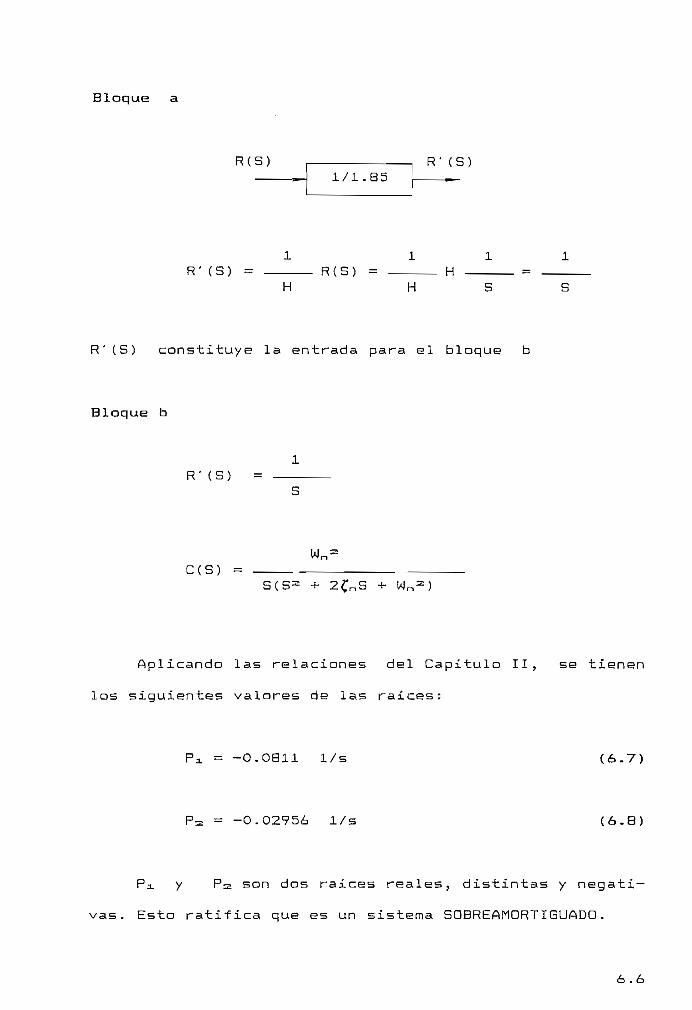
Bloque a
R ( S ) R ' ( S )1/1.85
1 1 1 1R ' (S) = R ( S ) = H =
H H
R'(S) constituye la entrada para el bloque b
Bloque b
R'(S) =
ees) =-f 2 n S 4-
Aplicando las relaciones del Capítulo II, se tienen
los siguientes valores de las raices:
Pa. = -0.0811 1/s (6.y)
^ « -0.02956 1/s (6.8)
PJL y P=z son dos raices reales, distintas y negati-
vas. Esto ratifica que es un sistema SOBREñMORTIGUADQ.
6.6

-o-0.0811
zona de estabilidady rapidez garantizadas
02956
Fig. 6.3 Ubicación de los polos dela función de transferencia
del servomecanismo
Como se aprecia en la figura 6.3? los polos están
cerca del eje imaginario, por esta razón el tiempo de
estabilización es grande y no se tiene una buena rapidez;
pero el sistema si es estable.
La respuesta en el tiempo ? c(t) es:
C(t) = K
calculando estas constantes (ver Capítulo 11)
= 0.996
3 = 0.56
= -1.56
6.7

reemplazando:
c(t) = 0.56 e-o.o - 1.56e- (6.9)
1.85
FIg . 6.4 Respuesta del servomecanismo enfunción del tiempo con realimentaclonunitaria y entrada R'(S) paso unitaria.
En la figura 6.4 se igualan el valor referencial
R'(t) con el valor medido c(t), dando un ERROR ACTUANTE
EA ~ O (en el análisis de realimentación unitaria).
Además EA s ET (error teórico); pero en el diagrama
de bloques de la figura 6.1 EA = ET ya que no se tiene
real Irnentación unitaria ; donde EA ~ O y ET = O (ET =
V. referencial - salida ) ; el valor referencial es una
señal de voltaje y la salida es un desplazamiento
longitudinal de la placa de sujeción.
6.8
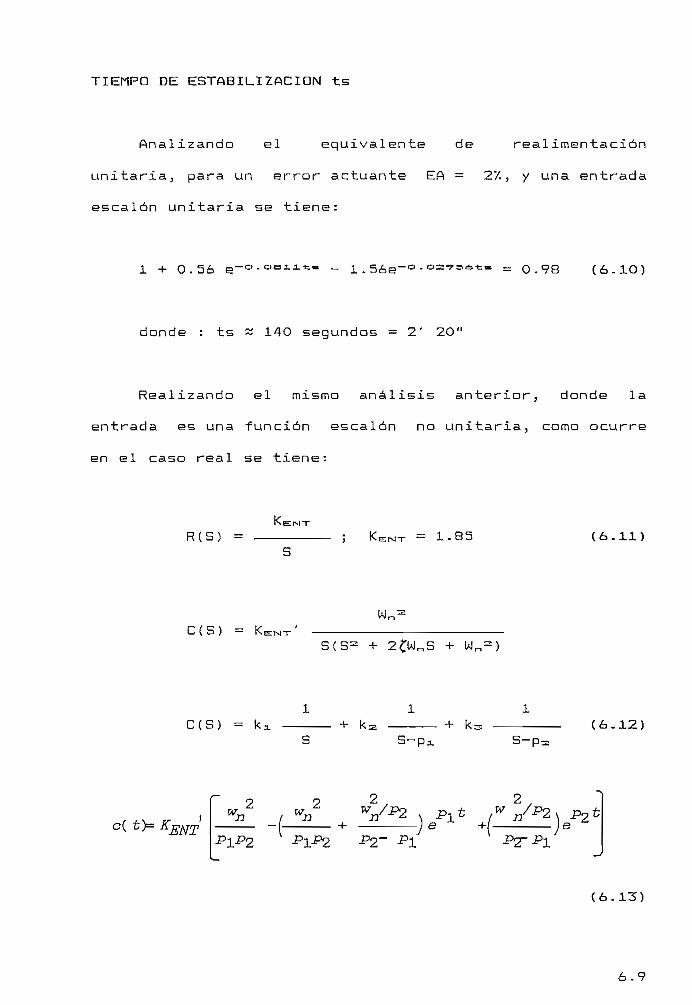
TIEMPO DE ESTABILIZACIÓN ts
Analizando el equivalente de real¿mentación
unitaria, para un errar actuante EA = 27., y una entrada
escalón unitaria se tiene:
0.56 e-o.aaiit. _ i. = 0.98 (6.1O)
donde : ts ~ 140 segundos = 2' 20"
Realizando el mismo análisis anterior, donde la
entrada es una función escalón no unitaria, como ocurre
en el caso real se tiene:
RCS) ~ 1-85 (6.11)
C ( S ) — KEIMT
c(
C(S) =S-P=
(6.12)
(6.13)
6.9

Observando el análisis de Capítulo 11, se ve que las
constantes son las mismas que para escalón unitaria, pero
escaladas en Kew-r-
KEN
KENT ' rr:
Fig. 6.5 Respuesta del servomecanismo enfunción del tiempo con realimentaciónunitaria y entrada R (S) paso no
unitaria.
CALCULO DE ERROR
Como se demostró en el Capítulo II, ecuaciones 2.116
y 2.117, y analizando el lazo de realimentación unitaria,
el sistema es TIPO 1; y el error e(s) = 0 , cuando la
entrada es una función ESCALÓN.
En un caso real práctico, no se cumple que el Error
Actuante 1legue a cero, ya que es necesario tener un
valor pequeño de error (A E) para mover el servomeca-
nismo, ya que antes que el error sea cero, el servomeca-
nismo se detiene debido al A MUERTO (pequeño voltaje
ó. 10

necesaria para vencer la inercia del servo.); y no se
podría llegar a la igualdad entre valor referencial y
valor medido.
LUGAR GEOMÉTRICO DE LAS RAICES
De lo anterior, se tiene el siguiente diagrama de
bloques (figura 6-6) para el servomecanismo "CONTROL
ANÁLOGO DE PRESIÓN MECÁNICA", donde se reemplazan los
datos numéricos reales.
Vref(S)
Vm
J_0.01166¿
S(9S + J
H
i .85
361
D
>< ( S )
Fig.6.6 Diagrama de bloques del servoconstruida "Contral Análogo
de Presión Mecánica"
Ksp KT'GH =
S(TmS
0.0215832285
S (95 +1)(6.
de donde
número de ceros finitos
número de polos
nz = O
= 2
implica que dosramas del lugarmétrico terminanen el infinito
6.11
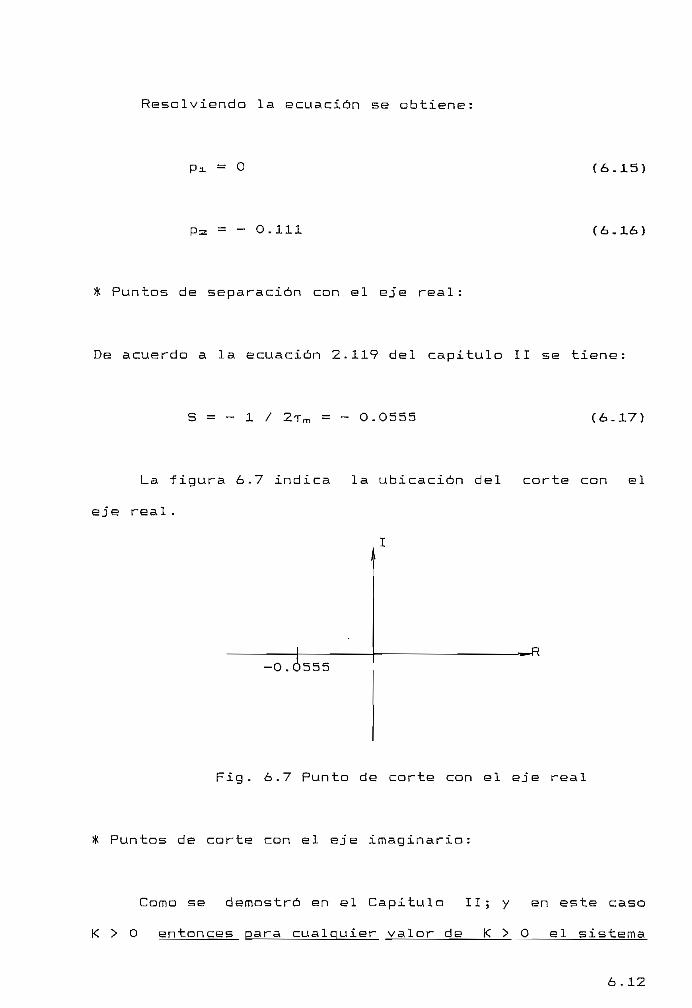
Resolviendo la ecuación se obtiene:
Pa. = O (6.15)
Pss = - 0.111 (6,16)
Puntos de separación con el eje real:
De acuerda a la ecuación 2.119 del capítulo II se tiene:
S = - 1 / 2Tm ~ - 0.0555 (6.17)
La figura 6.7 indica la ubicación del corte con el
eje real.
-0.0555-R
Fig - 6.7 Punto de corte con el ej'e real
Puntos de corte con el eje imaginaria:
Como se demostró en el Capítulo II; y en este caso
K > O entonces para cualquier valor de K > O el sistema
6.12
es ESTABLE (siendo K = K.p. K-r' ) ; consecuentemente no
existe corte con el eje imaginario, y todas las raices
están ubicadas en el semiplano izquierdo.
* Puntos de corte de las asíntotas:
Aplicando las ecuaciones 2.139 y 2.140 del Capítulo II:
cr = - l / 2 T m = 0.0555 (6.18)
$ = (2q -f 1) 90° , (6.19)
lo que da los valores de $ de 90°, 270° y 450°
* Análisis del Lugar Geométrico de las Raíces (para dife-
rentes valares de K).
Como :
1 + GH = O
se obtiene la ecuación
9s3 + s + 0.02158 = O
que es del tipo:
+ S + k = 0 (6.20)
6.13
entonces:
a) para k = O :
sx = O y s = -0.111
b).— Para que las raices sean iguales y reales a: —l/2Tm
el valor de K debe ser.:
K = 1 / 4 Tm = 0.02777
c).- En el caso en estudio K = O.02158, es decir:
O < 0.02158 < 0.02777
lo que da como consecuencia que tenemos dos raices reales
distintas :
sx = - 0.02931
5= = - 0.08179
La figura 6.8 indica el LUGAR GEOMÉTRICO DE LAS
RAICES para la Función be Transferencia del Servosistema
"CONTROL ANÁLOGO DE PRESIÓN MECÁNICA"
6.14
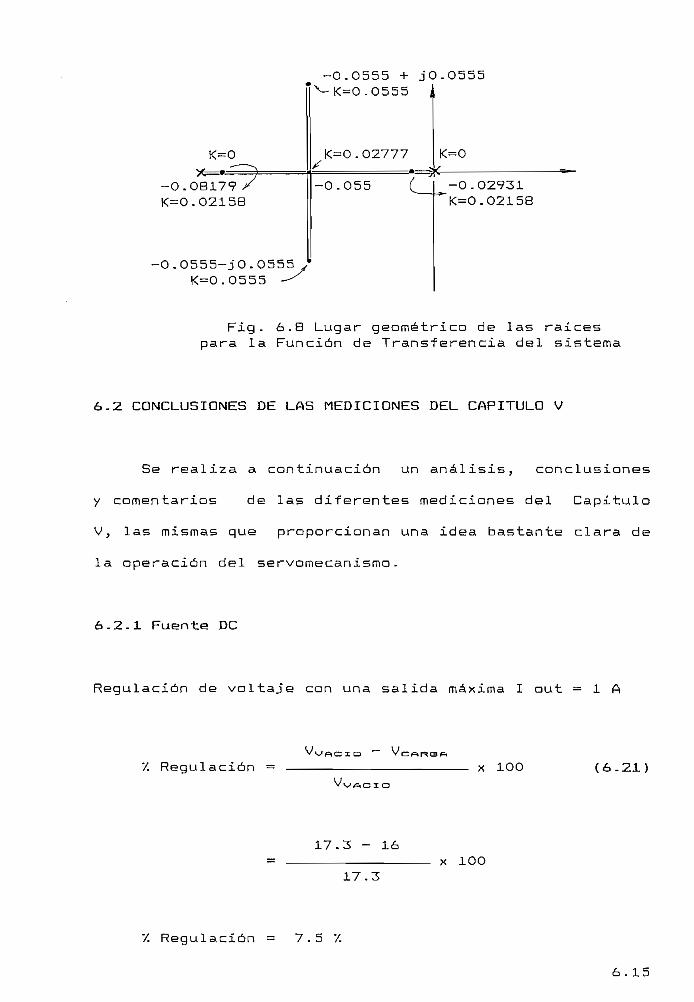
K=0
-0.0555 + JO.0555V-K=0.0555 ,.
K=0.02777 K=0
-0.02931"K=0.02158
-0.08179 X -0.055K=0.02158
-0.0555-jO.0555 /K=0.0555 -^
Fig. 6.8 Lugar geométrico de las raicespara la Función de Transferencia del sistema
6-2 CONCLUSIONES DE LAS MEDICIONES DEL CAPITULO V
Se realiza a continuación un análisis, conclusiones
y comentarlos de las diferentes mediciones del Capitulo
V, las mismas que proporcionan una Idea bastante clara de
la operación del servomecanismo.
6.2.1 Fuente DC
Regulación de voltaje con una salida máxima I out = 1 A
V "~ V
"/ Regulación = x 100 (6.21)
17.3 - 16x 1OO
17.3
"/. Regul ación - 7.57.
6. 15

Regulación de voltaje con salida nominal y como
carga el servomecanismo "Control análogo de Presión
Mecánica", (I out - 0.8 ft).
15.95 - 15.757. Regulación = x 100
15.95
7. Regulación = 1.25 7
Se deduce que con salida nominal + 15 V DC y lout =
0.8 A mej'ora la regulación de voltaj'e de la fuente DC con
respecta a la salida máxima.
Para estas rangas nominales de operación, la fuente
no sufre calentamientos excesivos.
6.2.2 SENSORES DE FUERZA Y PRESIÓN.
Sensor de esponja conductora.—
Analizando la tabla 5.1, y de las mediciones realizadas
experimentalmente se concluye que:
— la resistencia inicial propia del sensor no
permanece constante de uno a otro ciclo de
operación; es decir, que luego de una prueba no
regresa la resistencia a su valor inicial.
6.16

— no se tiene el mismo valor en la salida para una
misma presión cuando ésta se realiza dos ó más
veces.
— la salida demora un tiempo demasiada grande para
1legar a estabilizarse en un valor determinado, el
mismo que varia al realizar nuevamente la
experiencia.
Consecuentemente ? y dado que es necesario tener
refe-rencias fijas (valares estables), este tipo de
sensor na se lo puede utilizar en el sistema de control
automático en estudia.
Es de notar que s¿ sensa cualquier magnitud de
presión ejercida sobre él (es sensible), y esta ventaja
puede ser útil para otras aplicaciones como por ejemplo:
que al existir presión (sin importar su valor) este
dispositiva de un pulsa de dispara que activa algún
sistema de control de cualquier servomecanismo o alarma.
Sensor de fuerza potenciómetroco.— ( Balanza referencial)
Se toma corno referencia la tabla 5.2 y figura 5.1
(a), de donde se obtiene el rango de trabaja lineal que
se indica en la figura 6.9
6.17

Voor
7.2
0375 /_W [Ib]
l.B 2.2zona linealde trabajo .
Fig. 6.9 Rango de trabajo lineal delsensor de fuerza
Este sensor es el que proporciona el valor
referencial en el control automática del servomecanismo;
consecuentemente es esta zona estrecha la que se empleará
en este tipo de control.
Del análisis de la tabla 5.2 y figura 5.1 (a), se
deduce que:
para pesos W comprendidos entre:
* O < W < 0.8 Ibs. entonces Vout= 0.187 V , es
decir,la salida no varia, por lo
tanto no se detecta este rango de
pesos (W).
0.8 <W< 3.3 Ibs existe variación de Vout. conforme va
aumentando ó disminuyendo el peso W .
6.18

Dentro de esta zona está comprendida
el rango lineal de la balanza.
* Para W > 3.3 Ibs entonces Vout = 8.37 V, es decir,la
sal ida permanece constante a pesar de
aumentar los pesos debido a que se
llega al tope máximo de los resortes
de la balanza.
Consecuentemente se puede decir que tenemos una
balanza que detecta pesos en el rango:
0.8 < W < 3.3 Ibs.
Fuera de este rango, su valor de salida no es
confiable; pero tratándose para este caso de control
automático solamente se emplea la zona lineal de su
respuesta.
Sensor de presión potenciomélirjLCO.—
ñ) .— De acuerdo a la tabla 5.3 y la -figura 5.2 se tiene
que:
- El potenciómetro utilizado en todos sensores
(presión y fuerza) es tipo logarítmico con respecto
al desplazamiento del cursor.
6.19

- Valor nominal 5 Kft
-Zona lineal de trabajo de 3 mm a 10 mm de
desplazamiento del cursor.
B).— Pruebas de ajuste con Sensor de Presión
Potenciométrico.
Se han realizada dos experiencias:
# Con placa de sostenimiento de superficie rugosa de
esponja y:
superficies de cuerpos :
— rugosa esponja
— lisas de vidrio
— lisas de plástico
- medios (maskin)
cuyos datos se indican en la tabla 5.4 y figura 5.1
(b).(Capitulo V)
* Con placa de sostenimiento de superficies lisas de
plástica y superficies de cuerpos:
— rugosa de esponja
— lisas de vidria
6.20

— lisas de plástico
- medios ( maskin)
cuyos datos se indican en la tabla 5.5 y la figura 5.3
(b).(Capitulo V).
Realizando un análisis de estas tablas de valores y
de las curvas respectivas se concluye que:
— El rozamiento que se produce entre el cuerpo a
sostener y la placa de ajuste actú,a directamente a
favor del sostenimiento, es decir, que a mayor
fuerza de rozamiento (coeficiente de rozamiento)?
menor es la presión que se necesita ejercer sobre el
cuerpo para lograr sostenerlo, lo que en nuestro
caso se reflej'a en un menor voltaj'e de salida del
sensor de presión.
Dicho en otros términos, para sostener un mismo
peso, mayor será la presión que se necesita realizar
para sostenerlo mientras menor sea el rozamiento
entre el cuerpo y la placa.
— En las curvas 5.1 (b) y 5.3 (b), se aprecia que, a
menor rozamiento, las curvas de salida del sensor de
presión se corren a la izquierda, lo que indica que
aumenta el voltaj'e de salida del mismo, es decir se
necesita hacer mayor presión.
6.21

Comparando las curvas 5.1 ( b ) y 5.3 ( b ) , se aprecia
que las curvas 5.3 (b) están más corridas a la
izquierda que las 5.1 (b), dado que la superficie de
las placas de sostenimiento lisas ofrecen una menor
fricción que las placas de material rugoso.
En conclusión, para este caso es más ventajoso usar
placas de material poroso, ya que se logra sostener
mayor rango de pesos con una menor presión, y es asi
como se construye finalmente el prototipo .
Por otro lado, se aprecia que existen pesos menores
donde a pesar de ser sostenidas por el
servomecanismo, la salida del sensor de presión no
varía , esto demuestra que en estos casos basta la
fuerza de rozamiento para ejercer el sostenimiento.
Estos rangos varían dependiendo del rozamiento como
se indica a continuación:
Para placas rugosas :
— cuerpos medios de pesos W 1 0.12 Ibs
- cuerpos lisos de plástica W < O. 12 Ibs
— cuerpos lisos de vidrio W < 0.8 Ibs
— cuerpos rugosas de esponj'a W 5 1.0 Ibs
6.22

Para placas lisas de vidrio:
- cuerpos lisos de vidrio W < 0.1 Ibs.
- cuerpos medios (maskin) W < O.12 Ibs.
— cuerpos lisos de plástico W < 0.25 Ibs
— cuerpos rugosos de esponja W 1 O.4 Ibs.
— En el rango superior de pesos, existen pesos máximos
que se pueden sostener; pesos mayores a estos se
pueden sujetar pero no con la presión mínima
necesaria. Como se indica a continuación, para pesos
mayores a estos la salida del sensor no varia.
Placas rugosas de esponja:
- cuerpos medios Wmáx = 1.4 Ibs
— cuerpos lisos de plástico Wmáx = 1.6 Ibs
— cuerpos lisos de vidrio Wmáx = 4.7 Ibs
— cuerpos rugosos de esponj'a Wmáx = 5.6 Ibs
Placas lisas de vidrio:
— cuerpos lisos de vidrio Wmáx = 0.5 Ibs
— cuerpos medios Wmáx = 0.7 Ibs
— cuerpos lisos de plástico Wmáx = 0.8 Ibs
— cuerpos rugosos de e5ponja Wmáx - 3.5 1bs
6.23

- A continuación se indican los rangos de pesos dentro
de las cuales so. son detectados por los sensores de
presión , a fin de sostener objetos.
Placas rugosas:
~ cuerpos medios O.12 < W 1 1.4 Ibs
- cuerpos lisos de plástico 0.12 < W < 1.6 Ibs
— cuerpos lisos de vidria 0.8 < W < 4.7 Ibs
- cuerpos rugosos de esponja 1.0 < W 1 5.6 Ibs
Placas lisas de vidrio:
— cuerpos lisos de vidrio 0.1 < W < 0.5 Ibs.
- cuerpos medios 0.12 < W < 0.7 Ibs.
- cuerpos lisos de plástico O.25 < W < 0.8 Ibs.
- cuerpos rugosos de esponja 0.4 1 W 1 3.5 Ibs.
En estos intervalos, se puede sostener objetos con
la presión minirna necesaria pero con ayuda del
potenciómetro manual PM, con el cual se coloca el valor
referencial.
— A fin de determinar cual es el rango automática del
servomecanismo, hay que tomar en cuenta las zonas
aproximadamente lineales de las curvas de la balanza
referencial y del sensor de presión (figuras 5.1 y
5.3), y además en estas zonas? las regiones comunes
6.24

a fin de facilitar el acondicionamiento de la señal.
Tomando en cuenta lo anterior y analizando las
curvas se determina que para el prototipo se utilizarán
las curvas de las fiq. 5.1 (a) y (b), que corresponden a
las placas de sostenimiento rugoso, y de las superficies
de los cuerpos solamente las curvas de superficies lisas
de vidrio y rugosas de esponja coinciden en una pequeña
zona lineal para pesos comprendidos entre:
1.8 < W < 2.2 Ibs.
Es en estas condiciones que se diseña y construye
todo el control automática del servomecanismo.
6.2-3 SERVOMOTOR Y SISTEMA DE ENGRANAJES
Los datos de la figura 5.6 (Capitulo V) con carga
(cuando la placa está presionando), son los que se
utilizanparael diseñodel Amplificador de Patencia, ya
que éste es el que debe suministrar estos valores y asi
alimentar el servomotor.
Voltaje mínimo de bajada 3.5 V a 3.7 V
(se va disminuyendo el vol taj'e de alimentación Va, hasta
un Instante antes que se detenga el servomotor)
6.25

Voltaje mínimo de subida = 3.9 V
(Se va aumentando el voltaje Va desde cero, hasta lograr
mover el servomotor).
Valores menores a estos detienen el servomotor y se
paraliza el servomecanismo.
*En lo referente a la medición de parámetros de todo
el servomecanismo, indicada en el literal 5.3 prueba # 2,
se tiene que:
el servomotor tiene la siguiente función de
transferencia:
W(S) Km
= (6.22)TmS + 1
donde:
Raf
KT = Kf If
* J
R* +
En este caso, como se mide K-r' de todo el sistema,
así como Tm , entonces los valares medidos representan a
6.26

todo el sistema y no del motor solamente; ya que en éste
actúa la fricción ("f ) ? momento de inercia (J) tanto de
engranajes como del tornillo.
Cabe anotar que, como se mide a la salida, equivale
a referir todos los f y J del eje del motor hacia la
carga ( tornillo — placa de ajuste).
A continuación, y con base a la figura 6.10 se
explica el por qué las constantes encontradas no
representan las propias del motor? sino de todo el
sistema:
Va MOTOR ENGRANAJE 1/5 rnm/0
(a)
VaKm n Ktornillo
S(TmS-=— X
(b)
K-r'= Km n K-
Fig. 6.10 Diagrama de bloques de servomotorsistema de engranajes, tornillo sinfin y placa de ajuste (a) en lazo
abierta, (b) Función detransferencia equivalente
El valor medido experimentaimente 3 es KT que de la figu-
ra 6.10 se nota que es diferente de Km propia del motor,
porque la función de transferencia sola del motor es:
6.27
Km - - (6.23)
R«.f wq + K-rKfc,
En esta última ecuación, todavía se considera
feq.jparque debe incluirse el efecto también de los
engranajes, tornillo etc.
-**^ #>K De ahí que conocido K-r' (K-r' = Km n K) entonces se
conoce Km (equivalente a la salida). Si se desea
encontrar Km propio del motor? entonces se debería medir
f y J equivalentes referidos al eje del motar.
Ahora respecto a la constante de tiempo equivalente,
•éR* J «q
Tm = (6.24)
La constante de tiempo medida, no es la del motor,
pues es de todo el sistema ya que feq. y Jeq. son
influenciadas par engranajes, tornillo, etc. Si se
deseara encontrar propio del motor, habría que referir f
Y J tanto de la carga como de engranajes ?al ej'e del
motor y can estas valores y Ra se encontraría la
constante de tiempo propia del motor con carga,aplicando
la fórmula anterior, cálculos estos que no son de interés
para el propósito de la tesis, ya que se la ha
considerada coma una caj'a negra con todos los elementos
en su interior ( engranaj'es, tornillo), en la misma que
se midió la respuesta total a una entrada escalón.
6.28

A manera de ejemplo, la figura 6.11 indica un
servasistema típico:
Jm J* %NI ,/, -^
p i:
A/'
?
r5 /
s//
i*J6 JL
| 1
1 |
X
MOTOR
N4 N5
SISTEMA DE TORNILLO
ENGRANAJES PLACA AJUSTE
Fig. 6.11 Servosistema típico
donde
Jm = momento de inercia del motor
fm = coeficiente de fricción viscosa del motor
Jl = momento de inercia de la carga
f1 = coeficiente de fricción de la carga
Como las mediciones son a la salida, tienen que
intervenir Jeq. y feq. reflejados en el eje de salida.
Es decir:
Jeq =N6 N4 N6
4- - J3 + -- J2N2 N4 N6
N5 N3 N5 NI N3 N5(6.25)
6.29

feq = f
donde
N6
N5f3
W
N4 N6
N3 N5
2it
f2N2 N4 N6
NI N3 N5
(6.26)
(6-27)
W
g
x
JL
= peso de la placa con carga
— gravedad
= recorrido lineal
(Ibs)
(32 pié/seg^)
(pies/revolución)
= momento de inercia de la placa (slug—pie3)
6.2.4 AMPLIFICADOR DE POTENCIA
Tomando como base la tabla 5.69se nota que el
Amplificador de potencia debe proporcionar aproxima-
damente las siguientes respuestas:
Entrada Salida
Ve máx. = ± 15 v1
Ve min. = ± 3.7 V
Va máx. = ± 12 V
Va min de bajada = ± 3.5 V
Dentro de estos limites se debe tener una respuesta
lineal del Amplificador de Potencia.
Ó.3O

Comparando con los datos reales de .la tabla 5.8 :
Entrada Salida
Ve máx = +14.13 V Va rnáx . = +12.68 V
-12.56 V - 11.11 V
Ve min. = +3.39 V Va min. de bajada = +2.26 v
- 4.2 V - 2.95 V
—Se nota que resulta una zona muerta comprendida entre
+3.39V. y —2.2V.3 por lo que se debe aumentar al punto
sumador (detector de error) un voltaje que se lo ha
llamado A MUERTO de un valor de 4V? con lo que se corrige
que la característica sea prácticamente lineal desde
cero .
—Con la aproximación lineal^ se tiene una discrepancia de
alrededor del 287. del valor real en el punto de Ve = 4 V;
es decir que :
si Ve = 4 V, entonces
Va real = 2.8 v
Va aproximado = 3.6 v
Va aprox.= 287.
Va real
6.31

La aproximación lineal se cumple mejor para valores
altos de Ve: es decir alejados del punto cero.
Tomando la curva de respuesta de la figura 5.S y la
aproximación lineal, se cal cu la la ganancia del
amplificador de potencia :
Va 5.4= - . = 0.9
Ve
# En la zona comprendida entre:
- 1.4 V < Ve <1 v
el voltaje de salida del amplificador Va es O V.
* El valor Ve mínimo que se debe suministrar al
amplificador para que éste mueva al servomecanismo, un
instante antes de que se pare es:
Ve min = 4 V
Va = 2.93 V
la = 0.25 A
este valor es tomado cuando Ve está disminuyendo.
Para soltar el cuerpo el servo comienza a girar
cuando:
ó. 32

VE < -4.2 V
Va = - 2.95 V
la = 0.32 A
POTENCIA DESARROLLADA EN LOS TRANSISTORES DEL
AMPLIFICADOR DE POTENCIA.
Del cuadra de valores respectivo del Capitula V,
mientras mayor es la salida del amplificador (Va)3 los
transistores desarrollan menor patencia entre colector-
emisor .
Cuando Va disminuye, Vce aumenta, entonces aumenta
la potencia en los transistores principalmente antes que
se detenga el servo. El momento que se detiene se tiene
que :
Pr> ax = 3.73 W PD CT:E
3.73 W < 10 W (el fabricante indica 10 W de
patencia máxima del transistor)
Consecuentemente, se trabaja a menos del 50 "/. de su
valor nominal, lo que es ventajoso para no dañar los
transistores de potencia.
ó. 33

## Es de importancia utilizar fusibles de protección
para el Amplificador de Potencia, asi como también
el circuito protector de picos que se indica en el
Anexo B.
6.2.5 PROTOTIPO CONSTRUIDO.
Hay que anotar que las pruebas con el servomecanismo
ya construido son netamente orientado a probar si
realmente los cuerpos son sostenidos con las placas de
ajuste con la presión mínima necesaria. De ahi que no se
tienen datos numéricas de mediciones, sino más bien, una
experiencia práctica del prototipo.
Concluyéndose que en una forma bastante aproximada,
el prototipo si cumple el objetivo para el que fue
disenada y construido, en algunas casas hay que hacer
pequeños ajustes del valor referencial a fin de lograr
sostener los objetos más firmemente. Estos reajustes son
necesarios a fin de compensar de alguna manera las
diferentes aproximaciones e imperfecciones constructivas.
Control manual.—
En este caso, la referencia se la coloca manualmente
con el potenciómetro referencial PM , en base a la datos
obtenidas de la curva de la figura 5.1 (b), y no
interviene la señal referencial de la balanza.
6.34

Los pesos máximas a sostenerse dependen únicamente
de la máxima salida de voltaje del sensor de presión.
Así 3 para pesos W :
W < 4.5 Ibs sup. de los cuerpos lisos
de vidrio
W < 5.5 Ibs. sup. de los cuerpos rugosos
de esponja.
el ajuste que se puede hacer, corresponde al mínimo
necesario; es decir existe un control de la presión que
se ejerce sobre el objeto.
De varias pruebas realizadas, se midió el tiempo de
establecimiento promedio de 3.5 minutos , desde que
comienza la realimentación del valor medida hasta que se
detiene el servo y logra sostener el cuerpo.
Con base en las experiencias, se puede concluir que
al poner la referencia manual con el potenciómetro PM, se
realiza un sostenimiento de los cuerpos con la presión
mínima necesaria en forma bastante aceptable y con un
pequeño ajuste ya sea con PA ó PC.
6.35

Control manual para pesos mayores.
En general, con el potenciómetro PM calibrado en BU
valor máximo, s¿ puede sostener cuerpos cuyos pesos están
entre:
5.5 < W <.9 Ibs.
Se podrían sostener pesos mayores a 9 Ibs. pero esto
puede dañar la placa de sostenimiento, o quemar el motorj
por lo que no se aconseja.
En esta forma de funcionamiento, el sostenimiento no
se efectúa con la presión mínima necesaria, sino todo lo
contrario, de ahí que no se midió tiempo de
estabilización.
Control automático
El procedimiento es igual que al realizarlo con PM,
sino que en este caso la referencia la coloca
automáticamente la balanza.
El rango de pesos a sostener es:
1.8 < W < 2.2 Ibs.
6.36

Las experiencias realizadas s¿ satisfacen los
objetivos propuestos. El tiempo de establecimiento3 a
partir de que se cierra el lazo de realimentación está
alrededor de 2.33 minutos, que comparado con el que se
encuentra teóricamente con la ecuación 6.10 para un error
del 2 7. ? no proporciona mayor discrepancia.
6.2.6 CRITERIOS GENERALES DEL SERVOMECANISMO " CONTROL
ANÁLOGO DE PRESIÓN MECÁNICA"
Datos técnicas básicos del equipo:
V ac = 120 V
I ftC = 1 A
Peso máxima a sostener = 9 Ibs.
Peso mínimo a sostener = 1.8 Ibs.
LIMITANTES
Corno todo aparata , éste tiene limitantes y más aun
al ser construido empleando los medias disponibles a
nuestra alcance.
Entre las más importantes tenemos:
- Falta de precisión en los resultadas experimentales
por los siguientes motivos:
6.37

a . - Sistema mecánico:
. rozamientos
. engranajes
. zonas muertas
. equipo chatarra
b.~ Sistema electrónico:
. debido a la falta de precisión en los
elementos y tolerancias de valores,
ajustes que se realizó de acuerda a la
existencia en el mercada.
c.— sensores construidas con tecnología local.
d.— linealización, aproximaciones a rectas de las
características de los sensores; amplificadores
de potencia etc.
e.— errares cometidos en las mediciones, ya sea por
fal las cometidas en las lecturas o por falta de
precisión en los aparatas de medida.
Dependiendo de la naturaleza y superficie del cuerpo
a sujetarse, hay que hacer calibraciones para
corregir errores debido a fuerzas de rozamiento,
etc.
6.38

Nótese que el sistema es lenta, pequeña desventaja
que se traduce en ventaja al momento de realizar el
control de presión necesaria y suficiente.
Al momento de sujetar cuerpos delicados de mayor
peso (fuera del rango máxima manual), éstos se
pueden dañar.
El rango para control automático es pequeño , debido
a la no linealidad de los sensores , asi como también
a la pequeña zona de coincidencia de linealidad
entre las respuestas del sensor de presión y la
balanza referencial.
Construcción mecánica defectuosa de los sensores de
presión y fuerza; un verdadera sistema necesitaría :
resortes de precisión, mecanismos alineados,
deslizamientos lineales etc.; lo que no se puede
lograr en este caso, ya que dependiendo de la
posición del objeto con respecta al sensor su salida
tiene una pequeña variación, de ahí que para obtener
las curvas de respuesta se realizaron varias pruebas
y se tomaron valores promedios, en algunos casos el
valor más probable o frecuente.
6.39

SUGERENCIAS
Se puede mejorar los siguientes puntos importantes :
a . - Construcción de los sensores ; y obtener una
respuesta más estable y ganar sensibilidad.
b.— Mejorar el sistema de engranajes, y disminuir las
pérdidas por rozamientos , reduciéndose consecuen-
temente la zona muerta del servomecanismo.
c.— Mejorar la calidad de los elementos electrónicas
empleadas en la circuiteria de control 3 lo que da
como consecuencia una mejor respuesta pero un mayor
costo .
d.— En general se puede proporcionar un mejor
tratamiento al prototipo , para lo cual se requiere
mayor tiempo, dinero e infraestructura .
Nótese que todas estas mejoras toman como base de partida
los principios del prototipo construido en la presente
tesis
6.40
6.3 EXPERIENCIAS Y COMENTARIOS SOBRE EL DESARROLLO DEL
PRESENTE TEMA DE TESIS.
A continuación se mencionan algunas ideas,,
comentarios y sugerencias que se han ido obteniendo
-JÉ» durante el transcurso del desarrolla de la presente
tesis:
— Al comparar el orden constructiva del prototipo y en
general del desarrollo del presente trabajo, éste no
concuerda exactamente con el orden en que se
escriben los capítulos; dado que fue necesario ir
|?í experimentando las diversas etapas conforme se iba
avanzando en la construcción.
— Dada la aplicación y visión práctica del tema no
interesa en el desarrolla las análisis matemáticas
minuciosos de cada parte constitutiva; si no bien
par bloques; coma por ejemplo no hace falta conocer
-£~ Ra j La; del servomotor sino mej'ar la característica
total del servomecanismo en con j" unto.
- El sistema de control de este prototipo toma en
cuenta solamente el peso y tipo de superficie del
cuerpo a sostenerse; no interviene su forma,
temperatura y demás factores como lo hacen las
sensores naturales que tiene la mano del hombre,
* 6.41

— Si bien no se a logrado precisión absoluta en la
construcción del prototipo, queda la satisfacción de
haber culminado un tema amplio y completo al alcance
de nuestro esfuerza y capacidad económica.
-4 — No existe en el mercado local una buena gama de
equipo electrónico; y si los hay tienen un costo
elevado. A lo que se suma el aspecto económico que
en este caso es un aporte personal que tiene
limitantes; lo que induce a tratar de bajar los
costos y consecuentemente a disminuir su precisión y
calidad del equipo.
*— El desarrol lo de la tesis proporciona una visión más
profunda de la vinculación que existe entre la
teoría de control y la práctica misma que constituye
la base de esta tesis.
En teoría se puede plantear una serie de ecuaciones
-J^ que ya prácticamente no se las puede cumplir o son
muy difíciles de 1 levarlas a efecto.
- Se considera que un tema de tesis PRACTICO como
éste, no tiene nada que ver con una tesis TEÓRICA,
ya que en la primera se conjugan tanto la teoría
como la práctica a fin de hacer realidad los
análisis teóricos. Su desarrolio y construcción
6.42

involucran desde análisis bibliográficos,
investigaciones teóricas hasta visitas a talleres,
almacenes etc. es decir estar en contacto con los
maestros y artesanos.
Por última se considera que los ingenieros de
aplicación y mantenimiento que se requiere en la
actualidad y en el futuro, necesitan una mayor
comprensión de los principias prácticos de
servomecanismos que los que se tienen en libros
puramente teóricas o descriptivos.
6.43

ANEXOS
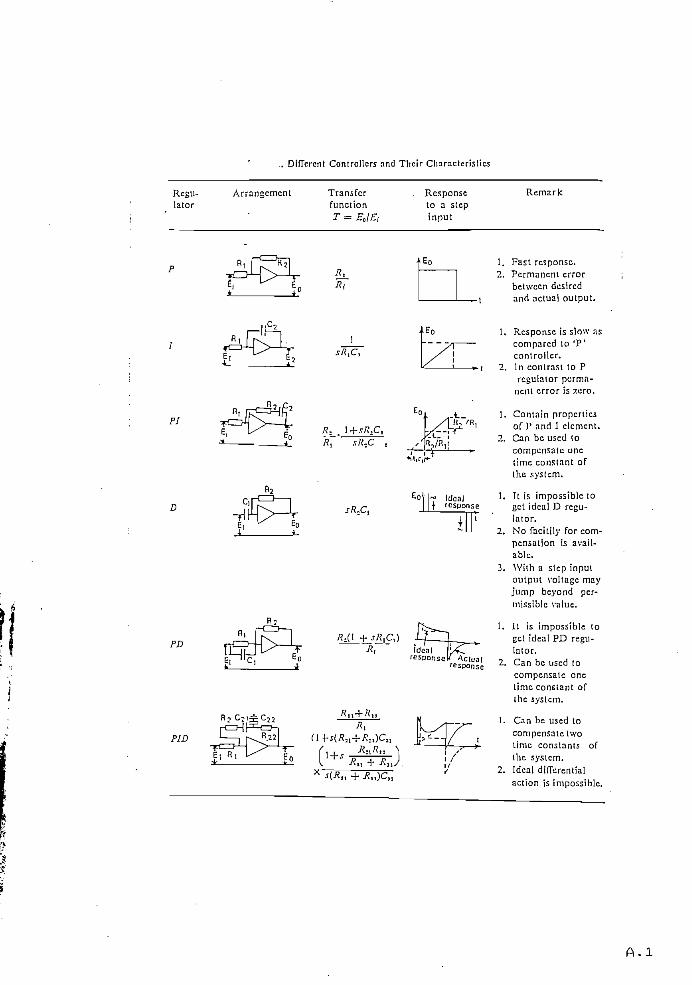
,. DlíTercnt Controllcrs and Thcir Chnractcrislics
Regu- Arrangcmcnt Transfcr . Response Remar klator functíon to a step
T = E0¡E¡ input
' ^ - 1C2
if3 ^^~T2 J/?»c>
EO 1. Fast rcsponse.2. Permanent error
betwecn dcsírcd
• E o 1. Response is slow as_^ comparcd to 'P'
/ J controller.
PD
PJD
E, "C
*IÍ|C*'*'
Eo idealrcspcxlse
rcgulator pcrma-ncnt error ¡s zcro.
1. Contaín propcrtícsof P and 1 clcmcnt.
2. Can bc uscd locompénsate onctime constant ofthe systcm.
1. Tt is impossiblc togct ideal D regu-
-f
2. No facitily for com-pensalion is avail-able.
3. With a slcp inpuloutput voltagc mayjump bcyond per-missíblc valúe.
1. It is impossiblc logct ideal PD regu-lator.
2. Can bc uscd tocompénsale onctime conEtant ofihe systcm.
1. Can bc uscd tocompénsate lwolime constants ofthc syslcm.
2. Ideal dirferentialaction is impossiblc.
A . l

Cir
cuí i
oC
ondi
cion
eseq
uili
brio
C,
I
SÍ
Ci
- C
»
1 =i£
i-K
,
ombr
e de
l pu
ente
y ob
serv
acio
nes
Pue
nte
de W
hca
mo
nc
bá.s
Íco.
Pre
sent
a m
ayor
sens
ibil
idad
cua
ndo
e!va
lor
de t
odas
sus
ram
ases
el m
ism
o.
Pu
ente
de
Wic
n.S
e pu
ede
util
izar
par
aef
ectu
ar m
edic
ione
s de
frec
uenc
ia u
sand
o la
sre
laci
ones
ind
icad
as.
Pu
ente
de
Ow
en.
Cir
cuit
oC
ondi
cion
es
deeq
uili
brio
\x -
K
i
LM -
1 +
R*1 -f
i\'o
mbr
c de
l pu
ente
,y
obse
rvac
ione
s
Pue
nle
deB
ajo
las
conc
.:>
¿'.x
s ¡
de e
quil
ibri
o «•
^ue
de
jut
iliz
ar p
ara
t:-_'
ciua
r |
med
icio
nes
de
frec
uenc
ia,
jde
acu
erdo
x
Pue
nle
de M
axw
ell.
Pue
nte
de H
ay.

ACONDICIONADOÍIGS ACTIVOS DE SEÑALES ANAIDGICAS
DENOMINACIÓN
Seguidor deVolta j e
Amplificadorinversor •
Amplificador
AmplificadorDiferencial para instrumentación
Conversor devoltaje a corriente
Conversor de
corriente a
voltaje
Amplificador
Logarítmico
CIRCUITO
Lp\^ — * wW . • + ^ O
RI Kzf . /YVV .Vl J>i »v
r R a = R i / / R z
V n + \V^s o
Rl -f" ^| r<2
R T
C- " ' R i _ j ^ ~ l v°^2 U^ l~~AA^4 :>\|_<
v. V^A-T- ^.^^
+ >- H! J L
r^ IR,
RI |-iír-|. VVy-1- ^^^^
Vi + ^~\5 < R a
J O
R M Í _ |JRL
ii i73n""" ' ~^^\ VQ
rt^4-
MR ^
vi "^ ''V°
^^4-
CARAC1T5RISTICAS
-Í4jy alta inrpedancia de entradaZitó 10 B oluns
-Baja impedancia de salida Zo^lOOolims
-Ganancia unitaria Vb=V"i
-Baja inpedancia de entrada Zin-Ri
-Alta ganancia de voltaje
V0 = - -rp- Vi
-Alta impedaiicia de entrada Zin ^106ohms
-Alta ganancia de voltaje
v Q j. Tí"~ "
-Muy alta impedancia de entrada-Alta sensibilidad-Alta ganancia de voltaje
R2
VSATftJ O.D lf t-uxl T) i
RT (max) _ lo (max)
R3 +Ri, +R5
v0 = - I i .R
'V
v ~ KT ] i vQ -- q • n-vi
- = 8 ,62 x lü~ 5 V°K
T = Tendera tura absoluta (°K)
c.i

Constantes piezocléctric*»,*
\fa¡er;al
Cu. -no
Sa! de Rochclle
Fosfato dihidrogenado deamonio
Cerámicas comerciales deti láñalo de bario
Orlcn:aciun
Corle A',- largo !>obre y,largo longitudinal
Corte X; espesorl o n g i t u d i n a l
Conc Y; esfuerzocor tan le ai espesor
Corle A', 45°; largolongitudinal
Corte Y, 45°', largolongitudinal
Corte 2, 0D; esfuerzocorlante frontal
Corte 2, 45"; largolongitudinal
A polarizaciónA polarización
Sensibilidadde carga d,coulombjlm3
/M-u-ío/u/m*
2O5 x 1CT1J
-2.04
4.4
435.0
-78.4
48.0
24.0
130-160-56.0
Sensibilidadde voltaje g,
voltjjm/wr^fo/u/m-1
0,055
-0.050
-0.108
O.C98
-0.29
OJ54
0.177
0.0106O.OO42-0.0053
D . l

TA
RJ
ET
A
EL
EC
TR
ÓN
ICA
OO
IM
KX
Ir»E
I-
MO
I>U
X-O
E
»E
O
OM
XR
OX
-

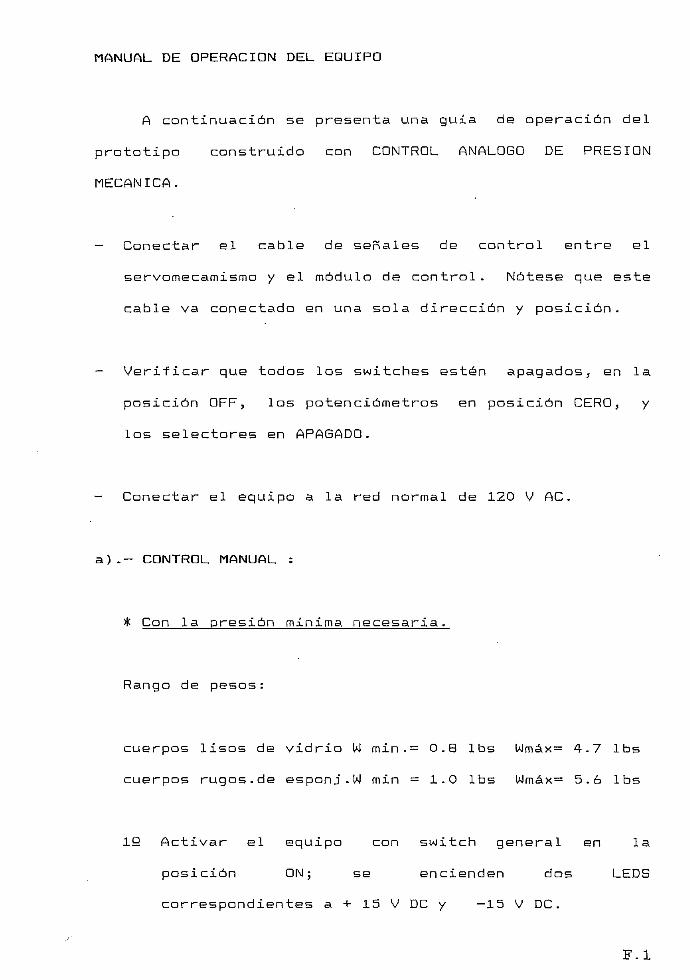
MANUAL DE OPERACIÓN DEL EQUIPO
A continuación se presenta una guía de operación del
prototipo construida can CONTROL ANÁLOGO DE PRESIÓN
MECÁNICA.
— Conectar el cable de señales de control entre el
servomecamismo y el módulo de control. Nótese que este
cable va conectada en una sola dirección y posición.
- Verificar que todos los switenes estén apagadas 3 en la
posición OFF, los potenciómetros en posición CERO, y
los selectores en APAGADO.
~ Conectar el equipo a la red normal de 120 V AC.
a).- CONTROL MANUAL :
* Con la presión mínima necesaria.
Rango de pesos:
cuerpos lisos de vidrio W min.= O.8 1bs Wmáx= 4.7 Ibs
cuerpos rugos.de esponj.W min = l.O Ibs Wmáx= 5.6 Ibs
19 Activar el equipo con switch general en la
posición ON; se encienden dos LEDS
correspondientes a + 15 V DC y -15 V DC.
F.l

22 Colocar el objeto sobre la balanza referencía1.
(En este caso esta balanza sirve únicamente como
soporte).
39. Abrir o cerrar las placas con el selector 54,
hasta que éstas queden lo más próximas al cuerpo a
sostenerse; colocando el selector en +15 V DC o —
15 V DC.
4° Colocar S4 en AUTOMÁTICO (posición central).
52 Calibrar el valor referencial con el potenciómetro
manual PM (este valor se calibra en voltio, en
función del peso y tipo de superficie, de acuerdo
a la curva de la fig 5.3.
69 Calibrar el potenciómetro P en 4 V, o un valor
ligeramente mayor.
72 Calibrar el potenciómetro PC en un valor
intermedio
82 Colocar 52 en MANUAL
95 Activar el switch 53 del Amplificador de patencia.
Desde este momento comienza la operación de
sostenimiento del cuerpo con la presión mínima
F.2

necesaria. El servomecanismo se detiene por sí solo
cuando el Valor medido se iguala al valor referencial
calibrado inicial mente .
10° Una vez que el servo se detiene, apagar el switch
S3 del Amplificador de Patencia .
US Subir el brazo de sujeción a fin de comprobar si
está sujeta el cuerpo ; caso contraria se puede
aumentar un poco más el ajuste con los
potenciómetros PC ó P y activando S3 .
129 Para aflojar o soltar el cuerpo, APAGAR el Switch
general, mover el selector S4 a -15 V DC, ACTIVAR
nuevamente el switch general, y se abren las
placas de sujeción -
132 Apagar el switch general
149. Apagar todos los demás selectores y controles .
Sujeción de pesos mayores .
- repetir los pasos 1, 2, 3 y 4 anteriores
59 Calibrar el valor referencial con Pfl en su valor
máximo .
F.3

- repetir los pasos 6, 7, y 8
9Q Activar switch S3 del Amplificador de Potencia.
Consecuentemente comienza la operación de
sostenimiento. En este caso no se 1 lega a igualar el
Valor medido y el Valor referencía1; de ahí que no se
detiene el servo por sí solo , si no que hay que
probar la sujeción del cuerpo.
1QP. Una vez sujeta el cuerpo, apagar el switch S3 del
Amplificador de Potencia.
- se repite los pasos 11, 12 13 y 14
b)-- CONTROL AUTOMÁTICO
En control automático, el valor referencial lo coloca
automáticamente la BALANZA.
Rango de pesos:
cuerpos lisos de vidria Wmin.= 1.8 1bs Wmáx=2.2 Ibs
cuerpo rugosa esponja Wmin = 1.8 1bs Wmáx= 2.2 Lbs
- Se repiten los pasos 1, 2, 3, y 4 anteriores
F.4
5° Almacenar el valor referencial proveniente de la
balanza con switch SI en la posición de "CARGA
REFERENCIAL"
— repetir las pasos 6 y 7 anteriores
8° Colocar el selector S2 en AUTOMÁTICO, que
dependiendo del tipo de superficies del cuerpo se
puede colocar en :
— superficies lisas de vidria
- superficies rugosas de esponja
- repetir los pasos 9, 10, 11, 12, 13, 14 anteriores.
PRECAUCIONES:
— Para chequear si el cuerpo está sostenido, antes de
levantar el brazo de sujeción, APAGAR 53.
— Antes de mover cualquier selector 52 ó 54; primera
apagar todo el equipo can el Switch General -
— Para cada operación de sujeción, comenzar siempre
con todo el equipo Apagada.
* F.5

SI EL SERVOMECANISMO NO FUNCIONA:
12 Verificar que exista alimentación de 120 V AC al
equipo
29. Chequear el buen estado de todas las fusibles.
2 fusibles de 1A de la fuente DC
2 fusibles de 0.5 A del Amplificador de Potencia
32 Conectar bien el cable de control que une el
servomecanismo con el módulo de control.
F.6

Adjustable RegulatorsOutputVoltage
VOUT•(DC)-±5%
1
1.2-37
1.2-37
1.2-37
1.2-33
1,2-32
5-30-
2.2—30
. 5-30
2.2-30
ECG Type
Pos
1900
956
970
935
1926
,, .
953 .
™.
Neg
1901
957
•r-í
--
1927
..
954
'oA(DC)
0.1
1.5
1.5
3.0
5.0
1.0
1.0
1.0
1.0
InputVoltageVIN (DC)
Max
40
40
40
35
t35
10
40
40
40
Mín
2.45
3.7
2.45
3.7
2.45
7.5
4.7
7.5
7.0
PDWatts
0.625
15.0
20
30
50
15
15
15
15
Case Style
TO-92
, ¡
VIH n M M VIH
BoliomVIow ' U U U BotiomVinw
1 2 3
. TO-220
Positiva ' S ^rt\T¿ Negativa -
to VOUT |0 VIN• ' 1. ADJ L2íJ • 1- ADJ
2.vOUT TíffíT 2. VIN1 3. VIN UUU 3- VOUT
TO-3
• , 1l . ¡ . . . i
i y
03
i PoBltlvo • /•"" ~""x\.x' ICASGl Negativo
1.ADJ ' ¿s 02 ^\J2. Input ' f _\. Output3. Output f (_) (_) ) 3. Input
\ o 1 ,/
Boltom View
TO-3 4-Pin
•. • • lí • ! • • ! 1
' II II 'Positivo No(i"tívo
INPUT OUTPUT ' COMMON CONTROL '
/^r"~~7c\) XOT'" -?\)• sS, <-j ' N\ COMMON' • / / ' Q /N^V INPUT
, COMMON CONTROL IHPUT OUTPUT
BOTTOMVIEW BOTTOMVIEW
TO-20Z 4-Pin
Positivo .' Q NogntlvB
Tñh Tnmmnn Tnh Commnn
1. Common ( I. Common2. Input 1 2 3 4 ] 2. Control '3. Output iHTfTn 3. OulputA. Control / U U U 4. Input
G. l

Linear IC and Module Circuits (cont'd)ECG950 .' • "
'¿Pos VR, 12 V, 100 mAECG951
!'Pos VR, 15 V, 100 mA':ECG977 ' - '• -Pos VR, 5 V/100 mA •''ECG981 ' ' 'Pos VR, 8 V/100 mA
ECG3B8. Pos VR, 6.2 V, 100 mA '
TO-92 See Fig. U 6 ECG952 TO-92 See Fig. L1i
Precisión 2.5 V Voltage Reference
B O T T O M V I E W
ECÚ9531" ' • '• • •' • ' TO-202,4-P¡n SeeFig.L18
JPps VR/Adjustable S ío 30 V, 1'A '
VCONTROU
VCONTROU Nornln*!- O V
';".;' '• NOTES; Heat sink taba connectod to common through devlce*\< . substraía. Not rocommaded for dlract eloctrícol connection. Recorrí-' • ' '• mendod R2 current ~ 1 mA.
ECG954
Neg VR, Adjustable -2.2 to -30 V
TO-202, 4-Pin See Fig. L1I
1 ÍO
S ,mí
R2 - 2.2 kíí
YCONTROL
VCONTROL Nomln.l - -2.33 V
NOTES: Hoot slnk Inbs connectod to rnput ihrough devlce subslrato, Nolre c o ni m and od lor direct oloclrical connoction.Recomniand R2 current^l mA
ECG955M '
Jímer/Oscillator
' ' 8-P!n DIP See Fig. L98 ECG956 TO-220 See Fig. L17
Pos VR, 1.2 to37 V, 1.5 A
(Tab)
ECG957 TO-220 See Fig.
Neg VR, 1.2 to 37 V, 1.5 A ' ' • :.
our
-"
DC
•>- fiw+
AOJ <ni•1.»
vl- V OUI \
—ti""M
(Tab)
f lLICRCO DCV]
ua* INPUI VOLIAGt«-^OV«AX Pe . U'*
ECG95S¡'PosVR, 18 V, 1 AECG960•Pos VR.-5 V,-1 A 'ECG962
'. Pos VR, 6 V, 1 AECG9M ' • Inpi
/PosVR, 8 V, 1 AECG966 cfnPosVR, 12 V, 1 A °-a3
ECG968PosVR, 15 V, 1 A . '
£00972''Pos VR, 24 V, 1 A -ECG1932
- PosVR, 10 V, 1 A
TO-220 See Fig. L17
Output
ECG959Neg VR, 18 V, 1 A
ECG961. Neg VR, 5 V, 1 AECG963Neg VR, 6 V, 1 A
ECG965Neg VR, 8 V, 1 A
ECG967Nog VR, 12 V, 1 A
ECG969Neg VR, 15 V, 1 A
ECG971Neg VR, 24 V, 1 A
TO-220 See Fíg. L17
G . 2

Darlington Power Transistors Máximum RatingsatTc=25°c
Deacrlptlon
NPN
ECG243
ECG245
ECG247
ECG249
ECG251
ECG9?
ECG99
EGG98
ECG274
ECG256
ECG270
ECG2316
ÉCG2317
ECG2Í4
ECG215
ECG257
ECG259
»/!,. '.
ECG261
ECG263
ECG2315
ECG253
ECG265
ECG266
ECG267
ECG268
ECG272
• PNP
ECG244
ECG246
ECG249
ECG250
ECG252
—
—
ECG275
—
ECG271
—
-
•
ECG258
ECG260
ECG262
ECG264—
ECG254
—
—
—
ECG269
ECG273
ColloctorTo Base
VoltsBVCBO
80 .
80
100
100
100
500
600
700
80
- 450
100 •
500
500 '
70
• 110
• . 80
100
- 100
100
. 400
• 80,• j
i*
. 50 •
50
30
50'
50
CollectorTo Emltter
Volts '
BVCEO
80
80
. 100
100
100
400
400
500
80
• 400 -
100
450
450
60
100
80
100
100
100
. 200
80
50 -
50
30
50
40
EmlllarTo Bnse
Volts
BVEB0
5
5
5
5
5
8
8
8
5
i
8
5
5
5
¡' 6
6
5
5
5
5
.6
5
' 13
13
13
13
12
Mnx.
CollectorCurrent
]Q Amps
8
10
12
16
20
10
50
20
4
• 20
10
. 10
15
(
10
8
5
8
8 '
10
. 8 '
' 4
0.5
0.5
0.5
2
2
Max.
BaseCurrent
IB niA
120
200 .
200
500
500 '
2500
10,000
2500
80
2500
• -500 •
5000
' .1000• i
i •
100
120-
ti
250
250
2000
100
__,
"*
—
i ""•"
...
MoX.
DBVÍCB
Dlss. PD
Watts
100
. 150
150
150
160
150
250
175
50
150
125
105
- 105
60
60
70
75
65
65
60
40
6.25
6.25
6.25-
10
10
TypCurrant
Galn
hFE
3,000
4,000
3,500
3,500 '
2,400
40 min
25 min
40 min
3,000 -
50 min
1,000 min
100 min
40 min
2;000 min
1,500 min
750 mín
2,500
1,000 min
1,000 min
100 min
2,000
10,000 min
40,000 min
90,000 min
1,000 min
25,000 min
NPN/PNPEqulvalant
Circuit
A/B
A/B
A/B
A/B
A/B
G
G '
G
A/B
• G -
E/F
A
A
A
A
A/8
A/B
A/B
A/B
G
A/B.
C
C
C
C/D
C/D
Packago
Case/Flg./Baslng
F¡9. T28 ^/-— -\
E— V
^^^^—-yTS^^^— C/CftSE
(°T/TO)TO-66 Fig. T25
^\ ¿s^^ \P (TO-218J
Fig. T46 /
Hj
TAB THCDNNECTS |TO COLLECTOR
uUc
TO-3PJ ÚFig. T48-1 1
TAB' CONNECTS
TO COLLECTORD
TO-127 ' 1Fig. T46 |¡
METAL 1• CONTACTCONNECTS TOCOLLECTOR . B
"oV-^ñrJm:UEU
^
i
1TO-220 {ViFig. T41 ^
TAB CONNECTS i\f¡TO COLLECTOH
C
TO-12B " ' rFig. T45 1
METALCONTACTCONNECTS TOCOLLECTOR B
¿
ff
c e
ss.- Rtu
TAB lililíCONNECTSTO COLLECTOR ||UU
E B C
TO-202N [\. T36 A^\S 1
TO COLLECTOR ElB 'c
H.l

TranSIStOrS. (cont'd) (Máximum Ratings atTc = 25°C Uníess Otherwise Noted) '•
ECG Type
ECG262 '
ECG263
ECG264
ECG265 \-
ECG266
ECG267
ECG268
ECG269
ECG270
ECG271
ECG272
ECG273
ECG274
ECG275
ECG277
ECG278
ECG 280
ECG28QMP'
ECG281
ECQ281MCP
ECG282
ECG2S3
ECG284
ECG284MP-
ECG28S '
ECG285MCP
ECG2S6
ECG287
ECG2B8
ECG2B9A
ECQ2S8AMP*
' . 5 ' ' !
t' [ . ' Doscrlptlon and <¡ >-,
Application
PNP-SI, Darlington Pwr Amp(Compl to ECG261) .- •
NPN-Si, Darlington Pwr Amp(Compl to EC.G264)
PNP-Si, Darlington Pwr Amp(Compl to ECG263)
NPN-Si/ Darlington Pwr Amp,Switch . . .
NPN-Si, Darlington Pwr. Amp,Switch : •
NPN-Si, Darlington Pwr Amp,Switch
NPN-S!, Darlington Pwr Amp(Compl to ECG269)
PNP-Si, Darlington Pwr Amp(Compl to ECG268)
NPN-Si, Darlington Pwr Amp,Switch (Compl to ECG271)
PNP-Si, Darlington Pwr Amp,Switch {Compl to ECG270)
NPN-SI, Darlington Pwr Amp,Switch (Compl to ECG273)
PNP-SI,. Darlington Pwr Amp,Switch (Compl. to ECG272)
NPN-SI, Darlington Pwr Amp,Switch (Compl to ECG275)
PNP-Si, Darlington Pwr Amp,Switch (Compl to ECG274)
NPN-SÍ, Horiz/Vert/ Audio PO
NPN-Si, Broad Band RF Amp
NPN-Si, AF Pwr Amp(Compl to ECG281)
PNP-Si, AF Pwr Amp(Compl to ECG28Q)Matched Compl Pair-Contaínsone each ECG280 (NPN) andECG281 (PNP)
NPN-SI, Final RF Pwr Amp,Sw (Po A W, 27 MHzf •
NPN-Si, HV-Hi Current Sw,Horiz Output
NPN-Si, AF Pwr Amp •(Compl to ECG285)
PNP-SI, AF Pwr Amp(Compl to ECG284)Vlatched Compl Pair-Containsone each ECG284 (NPN) andECG285 (PNP)
NPN-Si,. Pwr Amp, Sw, HorizOutput
NPN-SI, HV Gon Purp AmpCompl to ECG288)
PNP-Si, HV Gen Purp AmpCompl to ECG287)
NPN-Si, AF Pwr AmpCompl to ECG290A)
CollactorTo Base •
VoltsBVCBO
100
100
100
50
50
30
50
50
100 -
100
50
50
80
80
1100
40
140
140 -
150
800
180
180
300
300
300
100
CollectorTo Emltter
Volt»
' BVCEO '
100
100 .
100
50
50 .
30.
50
50
100
100
40
40
80
80
1100 (CES)
30
140
140
100
325
180
180
250
300
300
80
Bn*o toEmlttorVolts •
BVEBO
6 '
6
5
13
13
13
13
13
6
5
12
12
5 .
5
6
4
5
5
6
8
5
5
6
6
5
5
Mox,
CollectorCurren!
'c Ampa
8 '
10
10
.5
.5
.5 :
2
2
10
10
2
2
4
4
1
.4
12
12
4
10
16
16
2
.5
.5
.5
Mox.Devlce
Dlon. PD
Watts
65
65-
65
6.25. '
6.25
6.25
10
10
125
125
10
10 '
50
50
40
3.5
100
100
10
100
150 •
150
25
.625(TÁ = 25°CJ
.625
(TA = 25°C|
.500
(TA«25°C|
Froq.In
MHi
•'t
—
— '-
—
—
—
—
—
—
—
—
—
—
—
5 mín
1200 mín
6
6
70 mín
6
6
6
8
50
50
120
CurrenlGaln
hFE
1000 mín
1000 min
1000 min
10000min
40000rnin
90000min
1000 min
1000 mín
1000 min
1000 min
25000min
25000min
3000 typ
3000 typ
30 min
30 min
70 min
70 mín
85 mín
15 min
70 min
70 min
100 min
40 min
40 min
100 min
Packr
Caso
TO-220
TO-220
TO-220
TO-202
TO-202
TO-202
TO-202
TO-202
TO-3P(TO-218)
TO-3P(TO-218)
TO-202N
TO-202N
TO-66
TO-66
TC-9
TO-39
TO-3
TO-3
TO-39
TO-3
TO-3
TO-3
TO-66
TO-32
TO-92
TO-92
go
FÍENc
T4Í
T41
T41
T38
T3S
T3S
T38
T38
T48
T48
T36
T36
T25
T25
T27
T6
T28
T28
T6
T28
T28
T28
T25
T16
T16
T16
H.2
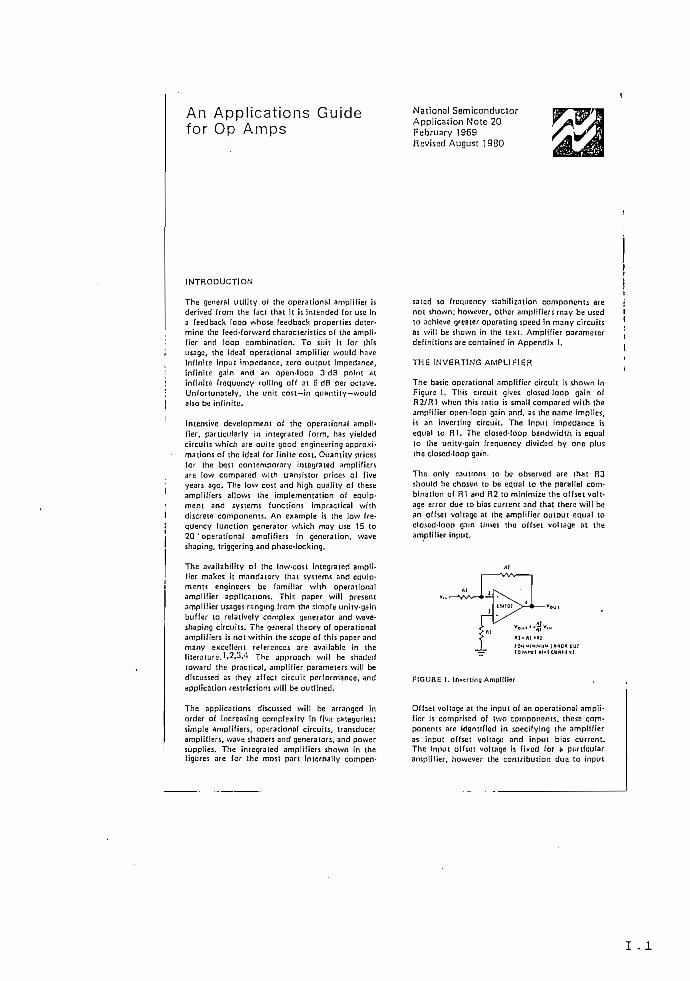
An Applications Guidefor Op Amps
National SemiconductorApplication Note 20February 1969Revised August 1980
1NTRODUCTION
intmite mput impeaance, zero output impeaance,infinite gain and an open-loop 3 dB point at¡nlinite frequcncy rolling off ai G dB per octave,UnfortunDlelv, ihe unit cost-ín quanttty-wouldalso be infinite.
Intensiva development of the operational ampli-fier, particularly in integrated form, has yieldedcircuits whích are quite good engineering approxí-mations of the ideal ¡or finite cosí. Quantiiy pricesfor the best comemporary integrated amplifiersare lew compared wiih transistor prices oí f¡veyears ago. The loiv cosí and high quality of tríeseamplifiers allows the rmplementalion of equip-ment and systems functions ímpraciícal withdiscreta components, An example is [he low Iré-quency function generator which may use 15 [o20 ' operational amolifiers ín generation, waveshaping, triggering and phase-locking.
The avaílabiliiy of the lowcost integrated ampli-lícr makcs it mandatory that systems and equip-ments engineers bs familiar with operationalamplifier applicanons. Thís paper will presentamplifier usages rangmg from the simple unity-gainbuffer [o relatively complex generalor and wave-shaping circuits. The general theory oí operationalamplifiers is not within the scope of this paper andmany exccllent rcfercncos are avaííable in Ihclitera ture.'.2.3,'! The approach will be shndudtoward the practical, amplifier parameters will bedlscussed as they affect circuit performance, andapplicatíon resuiciions will be outlíned.
The applications discussed will be arranged ínorder of ¡ncreasing complexity in five categories:simple amplifiers, operational circuits. transdticeramplifiers, wave shapers and generators, and powersupplies. The intcgrated amplifiers shown ¡n thefigures are for the mosi parí internally compcn-
sated so ífetiuency stabilization components arenot íhown; however, olrier amplifiers may be usedlo achieve grcater operating speed in many circuitsas will be shown in the text. Amplifier parameterdefinítions are contained Ín Appendíx I.
THE INVERT1WG AMPLIFIER
The basic operational amplifier circuít is shown ÍnFigure 1. This circuit gives closcd-Ioop gain ofR2/R1 whcn this rntio is small comparcd with theamp'ifier opcn-loop rjain and, as the ñame ¡mpties,¡s an invcrting circuit. The input ímpedance isequal to Rl, The closed-loop bandwidth is equalto the unitvgain frequency dívided by one plusthe closed-loop gain.
The only coutions to be obscrved are that R3should be chosen to be equal to the paralíel corn-bination of Hl and R2 to minimize the offset volt-age error due to bias current and that there will bean of fse t voltaqc ai the amplifier output equal tocloscd-loop í>iin limes the o f f se t voltage at theamplifier input.
FIGURE 1. InverlingAmpIlüer
Offset voltage ai ihe input of an operational ampli-fier is comprised of two components, these com-ponenls are ¡dentified in specifying the amplifier
as ínput offset voliagu and input bias current.The input offsut voltage is fixcd for a particularamplifier, however the contribulion due lo input
I .1

**Ü
r
bias
cu
rre
n;
is d
epen
den:
on
th
e drc
uil c
on
figu
-ra
iion
use
d.
Fof
m
ínim
um
o
ffse
t vo
ltag
e at
:he
amal
ifier
in
put
with
ou
t ci
rcu
it a
dju
stm
en
t th
eso
utce
res
ista
nce
for
both
in
ou
ts s
hould
be e
qual.
In t
his
case
the
máxi
mum
off
set
volta
ge
would
be
the a
lceb
raic
sum
oí
am
alif
ier
off
set
volta
ge
and
the
volta
oe d
rop
acr
oss
tne
souf
ce r
esis
tanc
e du
elo
of
fset
cu
rren!.
Am
olif
ier
off
set
volt
ag
e ¡s
the
pred
omin
an!
err
or
term
fo
r lo
w
sour
ce r
esis
tanc
esan
d of
fset
cu
rre
nt
caus
es
the
main
err
or
for
hig
hso
urce
res
ista
nces
.
In h
igh
sou
rce
resi
stan
ce a
pplic
alio
ns,
off
set
vo
lt-
age
al
the
am
plií
ier
outa
uv
may
be
ad
just
ed
byad
just
ing
the
valu
é of
R3
and
usin
g th
e va
ria
tio
n in
volta
ce dr
op
acro
ss
it as
an
input
off
set
volt
ag
etr
im.
Off
set
volta
oe
31
the
am
olif
ier
ou
tpu
t is
not
as
imoort
sm in
A
C c
ous:^
a
ao
lica
tion
s.
He
re
íhe
only
co
nsi
de
raro
n i
s tn
at a
ny o
ffse
t vo
lta
ge
at
the
outa
'jt
reau
ces
the
032
* (o
caak
linear
outp
ut
swir
c of
the
arn
olif
ier.
Th
e ca
in-f
reau
ency
cha
rsct
eris
tic o
f th
e a
mo
lifie
ran
d ;ts
íee
dbac
k ne
tvvo
rK m
ust
be
such
th
at
osc
il-la
tio
n d
oes
nat
ocajr.
To
mee
t ih
is c
onditi
on,
the
ph
ase
s
hif
t th
roucn
am
plif
ier
an
d fe
ed
ba
ckne
twor
fc
mus
t ne
ver
«.xc
esd
ISO
" ío
r an
y fr
e-
cuén
cy
whe
re
the
cam
of
the
am
olif
ier
and
¡ts
fee
ob
ack
n
etw
ork
is
gr
eate
r th
an
unity.
Inpra
ciic
al
ao
olic
atio
ns.
tne
pha
se sh
ift
sho
uld
not
aoor
oacn
18
0*
sinc
e m
is i
s ;h
e s
itua
tion
of
co
n-
diti
onal
uabili
ty.
Obvi
ouily
the
mo
st c
ritica
! ca
seoc
curs
árti
co t
he a
tte
nu
atio
n of
th
e fe
ed
ba
ck n
et-
wo
rv i
s ic
ro.
Am
aüfie
rs \
vhic
h a
re -
ot
inte
rna
lly
com
ae
nsa
tad
mav
5e
useo
lo
acm
eve
:ncr
ease
d n
erf
orm
an
ce m
Csr
e-jü
s w
nere
'e
ea
bsc
* n
etw
ork
a
tte
nu
ati
on
is
fiig
i. A
s an
exa
mol
e. t
~a L
MI0
1 m
ay
be o
ae
raie
aai
u?iit
y ca
m in
the
inve
rtm
g a
mo
lifie
r circuit w
ith
3 Is
a?
com
oe
nsa
ting
caaaci
tor.
sin
ce t
ne f
esd
ba
ck
netv
vorK
h
as
an
a
trs-
'ua
tion
of
6
dS
. w
hile
it
rec-
ji'e
s 30
oF
in
(he
rcn
-inve
riin
g u
nity
gain
con-
n5c:
:an
w
nere
th
e f«
caacJ
í n
etw
ork
ha
s ze
roa
tte
nu
atio
n.
Sin
ce a
rras
ifcer
sie
vv r
ate
is d
eoence
mon
co
moe
nsat
ion.
;n
e L'.llO
l sl
ew
rate
in
th
em
vern
og u
mty
gam
csm
ect
ion v
/itl b
e r
.vic
e t
hat
for
na
n
on
-in
vert
ing
con
ne
ctio
n a
nd
the
¡n
vert
tng
gain
of
ten c
onneci
ion
wiit
yie
ld e
leve
n tim
es
tne
Sle
w r
ate
of
trie
no
n-in
vert
ing u
nity
gain
ccn
ne
c-
tion.
The
com
pensa
ron
tra
de o
f f
for
a p
art
icu
lar
Con
nec;
ion
is
sta
bilí
ty
vers
us
ba
nd
wid
th,
larg
er
valú
es
of
com
oens
atio
n
cap
aci
tor
yie
ld
gre
aie
r
sta
oili
tv
and
low
er
ba
ncw
idth
an
d vi
ce
vers
a.
The or
eced
ing d
iscu
siio
n o
f o
ffse
t vo
ltage,
bías
curr
snt
and
sta
bili
tv i
s ao
olic
aole
to
mo
st a
mpli-
fier
3D3t
icat
ions
an
o .v
iil be
re
fere
nce
d in
la
ier
secü
ans.
A m
ore
com
s:»t
e tr
ea
tme
m h
co
nta
me
din
ñe'
eren
ce 4
.
TH
E N
ON
-IN
VE
RT
ING
AM
PL
IFI6
R
Fig
ure
2
sh
ows
3 hig
h
input
imp
ed
an
ce n
on-
ínve
rtin
g circuit.
This
ci
rcu
it gi
ves
a cl
ose
d-l
oo
ogain
equal
to t
he r
ati
o o
f th
e s
um
of
Rl
an
d R
2 t
oR
l and a
clo
sed-lo
op 3
dB
bandw
idth
equal to
the
am
plif
ier
unity
-gain
fr
eq
ue
ncy
div
ided
by
the
clo
sed
-lo
op g
ain
.
Th
e
prim
ary
di
ffer
ence
s b
etw
ee
n t
his
co
nn
ect
ion
and t
he í
nve
rtin
g c
ircu
it are
th
at
the o
utp
ut
is n
ol
inve
rte
d a
nd t
ha
t th
e in
put
impe
danc
e is
ve
ry h
igh
an
d
is
eq
ua
l to
th
e d
iffe
ren
tia
l in
put
ímpe
danc
em
ultip
lied
by
loop
ga
in.
[Op
en
loo
p
gain
.'Clo
sed
loop
gain
.f
In
DC
co
up
led
a
pp
lica
tion
s, in
pui
imp
ed
an
ce i
s no
t as
im
parianí
as in
put
curr
en
t an
díts
volta
ge d
rop
acr
oss
the
sourc
e resi
stance
.
Ap
plic
atio
ns
cau
tion
s sr
e th
e sa
me
for
this
am
oli-
fier
as
for
the
inve
rtin
g
am
plif
ier
wit
h
on
ee
xce
oti
on
. T
he a
mplia
r o
uto
ut
will
go in
to s
atu-
ratio
n i
f th
e i
nput
is a
llow
ed t
o í
loat.
This
may
be
ímp
ort
an
t if
the
am
alif
ier
mu
st b
e sw
itch
ed
fro
mso
urc
e t
o s
ou
rce
. Th
e c
om
pe
nsa
ron t
rad
e o
fí
dis-
cuss
ed
for
the
mve
rttn
g a
mp
lifie
r is
als
o va
lid
for
this
ca
nn
ect
ion
.
lOilí
tl!
IHS
CU
S"Í
M
FIG
UR
E 2
. N
on-ln
vert
inq
Am
plifi
er
TH
£ U
NIT
Y-G
AIN
EU
FF
EH
The unity
-gain
buffer
is s
how
n i
n F
igure
3.
The
circuit
gi
ves
tne
hio
nss
t in
out
imo
ed
an
ce o
f a
ny
op
era
tio
na
l a
mo
lifie
r cir
cu
it.
Input
imo
eo
an
ce i
s3pual
to
the
d
iffe
ren
na
l ¡n
put
imce
da
nce
rn
uiti
-plie
d b
y th
e o
oe
n-l
oa
a g
ain
, in
pa
ralle
l with
conv
mon
mo
de
in
pu
t im
aeda
nce.
Th
e g
ain
err
or
of
This
circuit
is e
qual
to i"3
re
cio
roca
l oí
the a
mo
iifie
ro
oe
n-l
oo
o g
ain
or
to t
ne c
om
mon
mo
de re
ject
ion
.w
hic
heve
r is
less
.
Input
impedance
is
a m
isle
adin
g c
once
pt
in a
DC
cousi
íd
unity
.gain
b
uff
er.
B
ias
curr
en
t fo
r th
ea
mp
nfie
r w
ill b
e s
upplit
d b
y th
e s
ourc
e re
sist
ance
and ivill
cau
se a
n e
rro
r at
the a
mp
lifie
r in
put
due
to .ti
volta
ge
dro
p
acro
ss
the
sou
rce
resi
stan
ce.
Sín
c2 m
is i
s th
e ca
se,
a lo
w
bias
cu
rre
nt
am
plif
ier
sucn
as
íhe L
H 1
02^
should
be
chos
en a
s a
un
ity-
gain
bu
ffe
r w
he
n w
ork
íng f
rom
htg
h s
ourc
e re
sis-
tanc
ss.
Bia
s cu
rre
nt
com
pe
nsa
tion
te
chn
iqu
es
are
disc
jssc
d in
Re
fere
nce
5.
The
cautío
ns
to be
obs
erve
d i
n a
pply
ing t
his
ci
r-cu
it ar
e th
ree:
the a
mp
lifie
r m
ust
be
co
mp
en
sate
dfo
r unity
gain
op
era
tio
n,
the o
utp
ut
swín
g o
f th
ea
mo
lifie
r m
ay
be li
mite
d b
y th
e a
mp
lifie
r co
mm
on
mocí
Tang
e, a
nd
som
e a
mp
lifie
rs e
xhib
it a la
ich-u
pm
ocs
v.iien
íhe
a
rnp
íifie
r co
mm
on
mo
de
range
isex
cesz
ed.
The
LM
107
may
be
use
d ¡n
this
circuit
witn
non
e o
f th
ese
pro
ble
ms;
or,
fo
r fa
ster
ope
ra-
tion. ;n
e L
M102
may
be
chose
n.
FIG
UR
E 3
. U
nitY
FIG
UR
E 4.
Sum
min
g A
mp
lilie
f
SU
MM
l.N'G
A
MP
LIF
IER
The
s^
mm
ing a
mo
lifie
r, a
spe
cial
cas
e of
th
e in
-ve
rtí"
; a
mo
lifie
r, i
s sh
ow
n ¡
n F
igu
re d
. T
he
cir
cuit
give
s ¡^
in
vert
ed
ou
tou
t w
hic
h
is e
ou
al
to
the
\veic
r;:M
a
lge
ora
ic
sum
of
all
[hre
e in
puts
. T
he
gain
cf
an
y m
cut
of
this
cir
cu
it i
s equal
to
the
ratio c
í th
e a
pq
roo
na
te inout
resi
sto
r to
th
e f
eed-
bac-
: -e
sist
or,
R
4.
Am
olif
ier
bandw
idth
m
ay
be
calc
u =
:sri
as
in
the in
vert
ing
am
olif
íer
show
n
inF
ig-jr;
! by
ass
umtn
g th
e i
nput
resi
stor
to
be th
ep
ars
-'í!
com
bin
atio
n o
f R
l. R
2,
an
d R
3.
Ao
olic
a-
tio
n
ríJíio
ns
a
re
the
sa
me
as
for
tne
inve
rtin
ga
ms:
^ ír.
If
an
un
com
oe
nsa
ted
am
olif
ier
is u
sed,
com
r-í'-
saito
n
is
calc
uta
ted
on
the
ba
sis
of
this
banc.
vict
n a
s is
ois
cuss
sd in
the
se
ctio
n d
esc
rib
ing
the s
i~si
e Í
nve
rtin
g a
mplif
ier.
The
=r/
an
tag
e
of
this
circuit I
s th
at
the
re
is n
oin
terE
;::on
bet\v
een inouts
and o
pera
tions s
uch
as
sum
mtn
g a
nd w
eig
hte
d a
-jera
ging
are
imp
lem
en
ted
very
e=s
ity.
TH
E Í
3IF
FE
RE
NC
E A
MP
LIF
IER
Th
e c
.ffa
ren
ce a
mo
lifie
r is
th
e c
om
ole
me
nt
of
tne
Sum
~ -
.9 a
mp
lifie
r and a
llow
s th
e s
ub
tra
ctio
n
of
hvo .:
tsgs
s or,
as
a s
oeci
al c
ase,
the
cance
llanon
of
2 s
pal
com
mon t
o tne
r.vo
inputs
. T
his
circu
í i
ís sh
ow
n ¡
n
Fig
ure
5 and
ís
use
ful
as a
cor
tío
na
l a
mp
lifie
r,
in m
aki
ng
a d
ifíe
ren
tia
l to
ende
d co
nve
rsió
n or
in r
eje
ctin
g a
co
mm
on
signal.
FIG
UR
ES
. D
ÍHer
ence
Am
plif
ier
Cir
cuit
ba
nd
wid
th
rnay
be
ca
lcu
late
d ¡n
the
manner
as f
or
íhe in
vert
ing a
mp
lifie
r. b
ut
iim
oedance
is
som
ew
hat
more
com
alic
ate
d.
Iim
oedance
fo
r th
e
t'.vo
in
ou
ts is
nol
nece
sseaual;
inve
nin
g i
nout
imp
ed
an
ce is
the
sam
e a
the
invenin
g
am
plif
ier
of
Fig
ure
1
an
dn
on
-in
vert
ing
input
imp
ed
an
ce i
s th
e s
um
o'
and R
4.
Ga
in f
or
eith
er
input
¡s th
e r
atio
of
FR
2
for
the
sp
ecia
l ca
se
of
a d
iffe
ren
tia
l i
sing
le-e
nded
ou
tpu
t v/
he
re R
l =
R3 a
nd R
2 =
The
ge
nera
l ex
pres
sion
fo
r gain
is
giv
en
infig
ure
. C
om
oe
nsa
tion
should
be
cho
sen
on
basi
s o
f a
mn
lifie
r bandw
idth
.
Car
e m
ust
be
exe
rcis
ed
in
ap
ply
ing
th
is ci
isi
nce
input
impe
danc
es a
re n
ot
equal fo
r m
inif
bias
curr
eni e
rror.
DIF
FE
RE
NT
IAT
OR
The
díf
fere
ntf
ato
r is
snow
n i
n F
igure
6 a
nd,
aiña
me i
rnplie
s, i
s us
ed t
o a
erf
orm
th
e m
atn
em
ao
oe
ratio
n
of
dif
fere
nti
ati
on
. T
he
form
sh
own
ot
the
pra
ctic
al
fo'm
. it
is a
Iru
e
dif
fere
nti
and
is
áM
rem
ely
su
scentiD
le
to
hig
n
frequi
nois
e s
mce
AC
ga
in m
crea
ses
at
tne r
ale
of
6d
3o
cta
ve.
In a
dd
itio
n,
the
fe
eo
ba
ck n
etw
ork
oí
dif
fere
nti
ato
r,
R2
C1
, is
an
RC
lo
w
pass
í
whic
h c
on
tnb
ute
s 90"
phas
e sh
ift
;o t
he
looo
ma
y ca
use
sta
bili
ty p
roble
ms
even
wit
h a
n a
nfie
r w
hic
h is
co
mp
en
sate
o fo
r unity g
ain
.
FIG
UH
SS
. D
Ufe
rent
iaio
r

Linear iu ana ivioauíe uircuits iconrcí)ECG943 , • • ? ' • ' , ' • ' 8-Pin Can See Fig. L3Dual Comparator ' ,'V '*'
Top View
ECGM3M 'Dual Comparator
8-PínDlPSeeFig. L98
NQMNVtfUJKOINMUTA
Top Víew
ECG944 8-Pin Can Seo Fig.Programmable Op Amp -
QU1E5CENTCUHHlNT SET
I H V E R T I K CINfUT
NON IKVERTINC
Top View
ECG944 M
Programmabla Op Amp
OFFIET.• ' , KULL.I
8-Pin DIP Sea Fig. L98
OOIEJCEHTCURREhTIET
Top Viaw
ECG945Op Amp/lnternal Comp/Darlington Input
BALANCÉ
S^Pin Can See Fig, I
fi 1 OUTfUT
COMPENSAT10H
Nole: Pin 4 connected lo case.
Top Víew
ECG946 ' - ' - •Posítive Power Supply Voltage Regulator
TO-66, 9-Pin See Fig. L12
>-f-H>fo CimHCNT LIM11
•O OUIPUI SENSE5
O DCSMIfT OUIPUI9Do outruT nEfCntfJ
NÜ15C f t L T E H
<5 OC SHIF.T SENSÉ
ECG947 ' ' 10-PinCanSeeFig.LDual, Freq-Compensated Op Amp
HON-INVERTINGINPUT A •
NOM-INVERIINGINPUT B
Top Víew
!'ECG947D ' .' 14-PinDlPSeeFig. L104! Dual, Freq-Compensated Op Amp
• • Ofl- i rr, Ad|, B Ll
Tt] N.C.
-riou-t£J Ad| H
Plns 9 & 13 Be Tied Externaliy
ECG948, ECG987Ouad Op Amp
O U I P U T I (I
14-PinDIPSeeFig. L104
-<M)OUIPU(
ECG949Dual Op Amp
8-Pin Can See Fig. U
NON-INVERT1NINPUTA
ourrur
NON-INVEHINOINPUIB
5rí INVEPJINGINPUT B
—(T) OUIPUI i
Top View
ECG94S - Dual Supply, Pin 11 =V~ECG987 — Single Supply, Pin 11=GND
NOTE¡ PIN i CONNECfED TO CASE
Top Víew
J .1
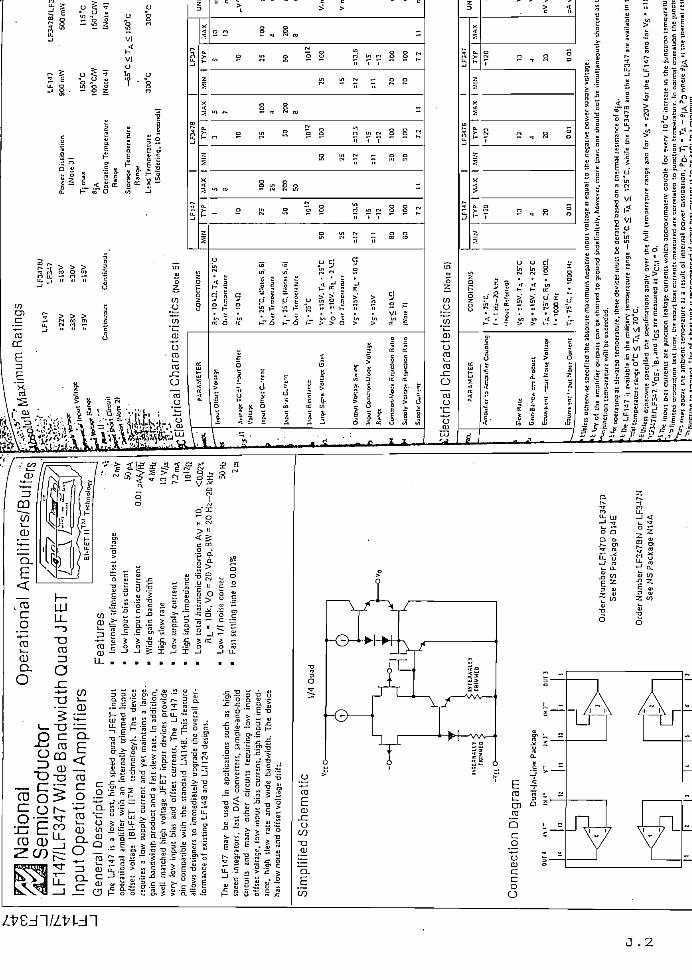
Z' C
LF147/LF347

IX checkplot 12 Jun 1992 00:02:17rapiovi.2 r3 holes: 221 solder sidaapproxifiíate size: 6.35 by 7.35 inches
«a«unanimna»HiimBnn n n n i
Knwattutwaauaauaiu
K.l

13
SI 1 UtHlll miHUUIIUlumiHIMH I
n a ¡y
13 1:1 a
1:1
a a u
mum,,!,,,*,™™™
Hltí
jj
iiiiiiii
(3
m|||li¡H|1»,iimliinlliilli;i,nit.»imuiiii,..r.Tiii.l»lmUj.,n.ml.imiHI,ii.imlllUinilHlllllIIIIIIJÍ3 ffl S ffi
¡
m
n a
mituasmB
¡.uaJUiiuuuiiHiiiiüüiiiiti
|1i n n i:\ \
í 1!
El Ifl 13 ni 13 13ItUUIllUI 1 H 1 1 1 Ujl 1 1 III UUU H 1 IH Jd
luuiiiini
i
>'•> i:iM
iiumuiiuiiiiuiniilli
.
!p
« 13 ¡
a a a a a B a
¡a a a t:i « n B i
§ 13 Kl U P 1<Kmmmüiiiuiiuiiu >
iwutiiiinuiítifttiniiii niuiiuiii»
íttumuiwatíiuamuuu, •.m.nuwuMuiuiiNiuiiiuwiauíiiniuu.imiiiiuiuumÍB W fl
ucmiiiiuiiuiiiiiiiiiuiuaiiiiuiuiinuDmiiaium I
a
u
u
_ .
n a i3
°
D B
.
B a ia a EI a ti n
ni uiium mi iiini MI iHiiiMHiiotiici
in n « » a » wciimHiliiul». «iiuHmuitutnm
l;l
o13 P
13 ||ii3 i.i p o n a¡túü J.1
111
fj rju.
11 n n ci
CHHIHU^IIKIMIMHmmiüHm
13 1,1 13
\i iiiniiniH[miii!iiuiiiiiíiíiiimi»i;it'iiiuiiti(i(iia
j
í Kl B B
p a n ia o a P
u p P n u P 1:1
n ¡a la a
uuuiti uiuHMiuJiiiuniiiii iiuuiiHuiiuii ittwuM
;1'1!
~""" 1
iiuiiimiL
ttIIIIIIIUUHIHIIIIIHIIIII
1P 13 P
nuiíiimiiui u ir
ii1
i!'
«JF 1!¡<f" 1( II HlWnilHHI! BU «UIll! MI 1 IIUIIIHl U"»M1¡3
uii)iiHUUii]iiiiiiiuiii]»(uiiiiii:i[»t<iii»MiiiHiiiiHiiiiiiuHii:t<ii<u Higii
í iía ni
u P
U P
" 1 "ÍHIILiuiiiiiin
iiluiiiuiimiuiiiiiiiiiiiiuiuiiiuiiiiiiuiiiiw UIIH
n
u u
IB
ü
lít
"i
; i
,a
u""""< HHM'"ü<"1
1
3
U Mitt'<H«mim«MttH!a«|jj B
¡ijii LI ¡y » m Pui"1 ralulll p m P H 13 (3 ti
Ul1"muí [IUUHIIÍIIIH3
wlr a mlíliiilil ittmilil
BrpnuiHiiiiiui i 1:1 P IU ia ti ni u
Irü H Cüiini
H !B u 13mu | u p (y p¡1 Í 1111 P11 a \\i n 13
imlliiiuiHiiuiiuuuimiiii:üDUHiiiuiiiiuiuumi3wi.tniiiiu!hU « . lullt «lili
m 'U i"!!!in ¡iiii/lü lililí %
lyim^Jíi !|<1<H"1"iB"ÜÍ p f ,:, n 1 "
iuiiiHii jr .upJ J j a Ul<liiiplUlltHMItUl J ^ [ H
¡!J jjj [;HIIUIrlllllllllllllUUUItl»IIIHIIIIIll3
i i
'
'
''
'
1
a
a
ua
1- mminilitm
13
saqaur g£ '¿ Aq S£'apis
BIBIOGRAFIA
BELOVE, C., "Enciclopedia de la Electrónica Ingeniería yTécnica", Editorial Océano, 1970.
BULLIET, N. "Servomecanismos", Fondo Educativa Interame-ricano, 1970.
CURTÍS, Jhanson, "Process Control InstrumentationTechnology"
DORF, R. C. "Sistemas Automáticos de Control", FondoEducativo ínteramericano , 1978.
ED. MARCOMBO, "La Electrónica en 30 Lecciones", EditorialMarcombo, 1982.
EDINALCO, "Electrónica Fácil" N2 33, EditorialEdinalco, 1986.
ELECTRO CRAFT CORPORATION, "DC Motors - Speed Controls -Servo Systems", Electro Craft Corporation, 1973.
IEEE, "Spectrum", Editorial Board, Abril 1985.
IEEE, "Spectrum", Editorial Board, Mayo 19S5.
IEEE, "Spectrum", Editorial Board, Enero, 1985.
IEEE, "Spectrum", Editorial Board, Agosto, 1985.
KUQ, B. C., "Sistemas Automáticos de Control", EditorialCEGSA, 1986.
Me GRAW HILL, "Electrónica Práctica", Editorial Me GrawHUÍ, 1989.
MILLMAN, J. "Electrónica Integrada", UniversidadPolitécnica de Barcelona, 1976.
NATIONAL SEMICONDUCTOR, "Linear Applications Handbook",Editorial National Semiconductor, 1980.
NATIONAL SEMICONDUCTOR, "Linear Data Book", EditorialNational Semiconductor, 1982.
OGATA, K. "Ingeniería de Control Moderna", EditorialPrentice Hall International, 1974.
SEIPPEL, R. G. "Transducers, Sensors and Detectors",Editorial Reston, 1983.
SUGANDHI, R. K.- SUGANDHI, K. K., "Thyristors Theory andApplications", Wiley Eanstern Limited, 1991
TUFIfsO, E. , "Diseño de un Servomecanismo de Posición" ,Tesis EPN, 1981.

ÍNDICE
ÍNDICE
CAPITULO I
1 .1 Importancia y objetivo 1.1
1.2 Contenido - 1.4
CAPITULO II
2.1 Servomecanismos . . . . . . . . 2.1
2.1.1 Qué es un Servosistema y Servomecanismo . . 2.1
2.1.2 Características 2.2
2.1.3 Clasificación . 2.5
2.1.4 Componentes 2.6
2.1.5 Error y Vibración (Oscilación) 2.40
2.1.6 Amortiguamiento 2.48
2.1.7 Sistema de medición 2.57
2.2 Sistemas de control (Contro1adores) . . . . 2.59
2.2.1 Clasificación, características y diseño . . 2.61
2.2.2 Selección de contraladores 2.87
2.3 Servasistema a implementarse . . . . . . . 2 . 88
2.3.1 Introducción 2.88
2.3.2 Prototipo a construirse .2.90
2.3.3 Funcionamiento del servomecanismo
"CONTROL ANÁLOGO DE PRESIÓN MECÁNICA" - - 2.1O5
2.4 Función de Transferencia teórica del
sistema propuesto . 2.114
2.4.1 Función de Transferencia Teórica . . . . 2.115
2.4.2 Análisis de la Función de Transferencia . 2.128

*
CAPITULO III
3.1 Sensores, Acondicionadores, Transductores . 3.1
3.1.1 Sensor . . . . . 3.1
3.1.2 Acondicionador 3.2
3.1.3 Transductor 3.9
3.2 Sensores (Transductores) de presión
^ mecánica y fuerza 3.16
3.2.1 Sensores de movimiento mecánico 3.17
3.2.2 Elementos elásticos para medición
de fuerzas 3 . 40
3.2.3 Estensiómetros eléctricas . . . 3.42
3.2.4 Fotodetección 3.49
3.3 Sensores especiales 3.54
*' 3.3.1 Clasificación y características 3.54
3.3.2 Tendencia futura . . . . . . . . 3.65
3.4 Tipo de Transductor que se empleará . . . . 3.68
CAPITULO IV
4.1 Introducción y concepción del diseño . . . 4.1
4.2 Diseño y construcción del servomecanismo
& (Parte Mecánica) . . . 4.8
4.3 Diseño y construcción del sensor . . . . . 4.13
4.3.1 Sensor de Presión 4.13
4.3.2 Sensor de Fuerza 4.21
4.3.3 Sensor de esponja conductora . . . . . . . 4.29
4.4 Diseño y construcción eléctrica,
electrónica 4.32
4.4.1 Amplificador de Potencia . 4.32
4.4.2 Sistema de control 4.51
4.4.3 Fuente DC: diseño y construcción 4.83
4.5 Construcción y ensamblaje total 4.9O
4.6 Medición de parámetros y función de
transferencia del sistema construido . , . 4-95
4.6.1 Objetivo de la medición de parámetros
reales 4.95
4.ó.2 Medición de parámetros reales 4.9ó
4.ó.3 Función de transferencia del sistema
construido 4.107
CAPITULO V
5. 1 Pruebas de la fuente regulada 5.2
5.2 Sensores de presión y fuerza . 5.4
5.3 Servomotor, sistema de engranaj'es
y placa de ajuste 5.15
5.4 Amplificador de potencia 5.26
5.5 Pruebas totales del prototipo construido . 5.29
CAPITULO VI
6.1 Análisis de la función de transferencia
real del Servomecanismo "Control Análogo
de Presión Mecánica" 6.1
6.2 Conclusiones de las mediciones
del Capitulo V 6.15
6.2.2 Sensores de Fuerza y Presión - . . . . . . 6.16
6.2.3 Servomotor y sistema de engranaj'es . . . . 6.25
6.2.4 Amplificador de patencia 6.30
6.2.5 Prototipo construido 6.34

6.2.6 Criterios generales del servomecanismo
"Control Análogo de Presión Mecánica" . . . 6.37
6.3 Experiencias y comentarios sobre el
desarrollo del presente tema de tesis . . . 6.41
ANEXOS
A.2.1 Diferentes tipos de controladores
y sus características A.l
A.3.1 Circuitos puente Wheastone para mediciones
de impedancias . . . . . B.l
A.3.2 Acondicionadores de señal analógicos . . . C.l
A.3.3 Valores de constantes piezoeléctricas . . . D.1
A.4.1 (a) y (b) Esquema detallado de las
conexiones electrónicas del Prototipo . . . E.1
A.4.2 Manual de Operación del Prototipo . . . . . F.l
A.4.3 Características y datos técnicos de los
reguladores de voltaje ECG-956 y ECG-957 . G.1
A.4.4 Características, datos técnicos de los
transistores de patencia ECG-268 y ECG-269 H.l
C Circuitos prácticos que recomienda el
fabricante . I . 1
E Datos técnicas del circuito integrada
ECG-74B . . . . . . J.l
F Circuito impreso (tarjeta electrónica). . . .K.I/