Apuntes
46
Estos apuntes están aún en proceso de elaboración, por ello están incompletos y pueden existir algunos errores. GEOLOGÍA ESTRUCTURAL Posgrado en Ciencias de la Tierra, UNAM Temario 2007 Juriquilla, Qro. Profesores del curso: Angel F. Nieto-Samaniego Susana A. Alaniz-Alvarez Descripción geométrica de las estructuras tectónicas. Fracturas y fallas Simbología y nomenclatura Partes que constituyen una falla, tipos de fallas y tipos de fracturas Los planos de fracturas en los ensayos mecánicos Interpretación de las deformaciones frágiles naturales: Fallas (descripción geométrica). Fallas y juntas de cizallamiento, grietas de tensión y diaclasas. Fosas y Pilares tectónicos; cuencas en extensión. Fallas de rumbo o de corrimiento lateral y fallas transformantes. Fallas Inversas y cabalgaduras. Bibliografía: Twiss, R.J., and Moores, E.M., 1992, Structural Geology. New York, W.H. Freeman and Co., p. 50-71 Pliegues: Clasificación, morfología, orientación y técnicas de proyección, secciones y perfiles. Mecanismos de plegamiento: Capas simples y múltiples Deformación y estructuras a pequeña escala en pliegues. Pliegues superpuestos. Bibliografía: Ramsay, J.G. y Huber, M.I., 1983. The Techniques of Modern Structural Geology, Volume 2: Folds and Fractures. Academic Press, p. 309-699. Mercier J. L. y Vergely P. 1992, Tectonique. Géosciences, Dunod. Paris. 214 p. Esfuerzo Iniciamos estos apuntes con el estudio de las deformaciones porque en la naturaleza lo que observamos y podemos medir son justamente deformaciones. Al intentar deformar un cuerpo nos encontramos que existe cierta resistencia al proceso deformante, esa resistencia puede deberse a Page 1 of 46 CLASE 28/08/2013 http://www.geociencias.unam.mx/~afns/Apuntes.htm
-
Upload
juan-carlos-torres-hernandez -
Category
Documents
-
view
32 -
download
5
Transcript of Apuntes

Estos apuntes están aún en proceso de elaboración, por ello están incompletos y pueden existir algunos errores.
GEOLOGÍA ESTRUCTURAL
Posgrado en Ciencias de la Tierra, UNAMTemario 2007Juriquilla, Qro.
Profesores del curso:Angel F. Nieto-SamaniegoSusana A. Alaniz-Alvarez
Descripción geométrica de las estructuras tectónicas.
Fracturas y fallas
Simbología y nomenclaturaPartes que constituyen una falla, tipos de fallas y tipos de fracturas Los planos de fracturas en los ensayos mecánicos Interpretación de las deformaciones frágiles naturales: Fallas (descripción geométrica).Fallas y juntas de cizallamiento, grietas de tensión y diaclasas. Fosas y Pilares tectónicos; cuencas en extensión.Fallas de rumbo o de corrimiento lateral y fallas transformantes.Fallas Inversas y cabalgaduras.Bibliografía: Twiss, R.J., and Moores, E.M., 1992, Structural Geology. New York, W.H. Freeman and Co., p. 50-71
Pliegues: Clasificación, morfología, orientación y técnicas de proyección, secciones y perfiles. Mecanismos de plegamiento: Capas simples y múltiplesDeformación y estructuras a pequeña escala en pliegues. Pliegues superpuestos.Bibliografía: Ramsay, J.G. y Huber, M.I., 1983. The Techniques of Modern Structural Geology, Volume 2: Folds and Fractures.
Academic Press, p. 309-699. Mercier J. L. y Vergely P. 1992, Tectonique. Géosciences, Dunod. Paris. 214 p.
Esfuerzo
Iniciamos estos apuntes con el estudio de las deformaciones porque en la naturaleza lo que
observamos y podemos medir son justamente deformaciones. Al intentar deformar un cuerpo nos
encontramos que existe cierta resistencia al proceso deformante, esa resistencia puede deberse a
Page 1 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

múltiples causas, pro ejemplo cuando un cuerpo que está en contacto con otro presenta una resistencia
al deslizamiento sobe la superficie de contacto, la cual es conocida como fuerza friccional y que es
proporcional a la fuerza perpendicular que actúa sobre la superficie de deslizamiento. De manera
semejante podemos encontrar resistencias a desplazamientos de las partículas que forman un cuerpo
debido a que implican ruptura, no por deslizamiento sino por separación de las partes, o bien por
fricción entre partículas. En el caso de la deformación cristal-plástica, se requiere cierta energía que
active y mantenga los procesos de transferencia de materia que producen como resultado la
deformación, esa energía es introducida al sistema a manera de calor y por la aplicación de fuerzas.
De la mecánica clásica podemos deducir la relación que guardan las deformaciones con algunas
fuerzas. De acuerdo con la ley F=ma (siendo F una fuerza, m una masa y a una aceleración), para
acelerar (o desacelerar) una masa cualquiera se requiere una Fuerza que venza una resistencia a
cambiar su condición de movimiento (o reposo), que será igual a la masa multiplicada por la
aceleración lograda. Lo anterior ejemplifica las relaciones que existen entre fuerzas y deformación, se
puede generalizar que existen dos tipos de fuerzas fundamentales que actúan sobre los medios
geológicos: Las Fuerzas de Cuerpo y las Fuerzas de Superficie. Las primeras de ellas son las que
actúan sobre cada una de las partículas que forman el cuerpo de roca y las de superficie actúan sobre
“caras” de los cuerpos o segmentos de esos cuerpos. En el caso que nos ocupa trataremos sobre las
fuerzas de superficie, que es el ámbito de la Geología Estructural y dejaremos de lado (salvo que se
especifique lo contrario) las fuerzas de cuerpo, que caen más en el ámbito de la Tectónica.
Si consideramos solamente las fuerzas de superficie, entonces resulta intuitivo que requerimos
asociar dichas fuerzas al área de la superficie donde actúan, lo que de manera natural nos introduce el
concepto de esfuerzo. Podemos definir el esfuerzo como la cantidad de fuerza actuante por cada
unidad de superficie y formalmente se expresa como , donde es el esfuerzo y F la fuerza
que actúa sobre el área A. Como se verá más adelante el estado de esfuerzos al que está sometido una
partícula queda definido por un tensor de segundo orden denominado tensor de esfuerzos y que
representaremos como . Las consideraciones anteriores nos llevan, por lo pronto y de manera
general, a asociar un estado deformado a un estado de esfuerzos, ya que los desplazamientos de las
partículas del cuerpo deformado requerirán fuerzas que venzan la resistencia a la deformación. A la
expresión formal de esta condición la denominamos ecuación constitutiva de deformación-esfuerzo
(consideraremos en este curso solamente la teoría elástica) y se expresa como , donde
es un tensor de cuarto orden relaciona linealmente la deformación con el esfuerzos. Dentro del
marco de referencia que nos da lo anterior, nos adentraremos en algunos detalles del análisis de
esfuerzos aplicado d las deformaciones de los cuerpos de roca.
Esfuerzo sobre un plano
Page 2 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Partiendo de la definición de esfuerzo mencionada arriba, donde , y considerando
que una fuerza es un vector, podemos ver que es posible cambiar nuestra idea de “fuerza que está
actuando sobre una superficie” a considerar un esfuerzo actuando sobre esa misma superficie, ya que
éste esfuerzo lo obtendremos simplemente de dividir la magnitud de la fuerza entre el área de la
superficie donde está actuando. Evidentemente, el esfuerzo así obtenido será también un vector, ya
que un vector (fuerza) multiplicado por un escalar (área) es igual a otro vector (esfuerzo). Sin
embargo se debe tener en mente que los esfuerzos solamente son susceptibles de ser tratados como
cantidades vectoriales cuando están asociados a un plano.
En general un estado de esfuerzos en una cantidad tensorial, el tratamiento matemático es
igual que en el caso del tensor de distorsión ( ) ya que al igual que este, se trata de un tensor
simétrico de segundo orden; es decir, no existe la parte rotacional (tensor antisimétrico).
Consecuentemente, un estado de esfuerzos también se puede representar por un elipsoide. La
deducción del tensor de esfuerzos se verá más adelante, por lo pronto solamente requerimos tener en
mente su carácter tensorial.
Si consideramos un plano que se encuentra sometido a un estado de esfuerzos, la totalidad del
estado de esfuerzos (recuérdese que es una cantidad tensorial con nueve componentes en tres
dimensiones) quedará resuelta por un solo vector actuando sobre el plano, es decir se resolverá en una
cantidad vectorial con tres componentes en tres dimensiones. A este vector lo denominaremos vector
tracción. Del cálculo tensorial se sabe que un tensor de segundo orden es un operador lineal que
relaciona dos vectores; aplicando esta propiedad a nuestro caso, y representando el plano por medio
de un vector unitario perpendicular a él, podemos obtener fácilmente el vector tracción
, donde Ti es el vector tracción (vector de esfuerzo) y nj el vector unitario perpendicular al
plano donde actúa dicho esfuerzo. Comúnmente se consideran dos componentes del vector tracción
que actúan sobre el plano, el vector normal (al plano) llamado esfuerzo normal y el vector paralelo
al plano llamado esfuerzo de cizalla . Lo anterior se ilustra en la Figura IIIa.
Figura IIIa. Esquema que muestra las relaciones geométricas entre el vector tracción y un plano de falla. La flecha
encima de las letras indica su carácter vectorial.
Page 3 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Estos conceptos son especialmente importantes en el análisis de las fallas, ya que la resistencia
friccional al deslizamiento es proporcional al esfuerzo normal y la magnitud, dirección y sentido
del deslizamiento son proporcionales al esfuerzo de cizalla máximo que actúa sobre el plano de falla
. La aplicación a casos específicos se verá más adelante.
Tensor de Esfuerzos
Nota: Por convención, consideraremos los esfuerzos compresivos como positivos y los
esfuerzos tencionales como negativos.
En términos generales un tensor es un ente matemático que relaciona una cierta cantidad de
números, denominados componentes del tensor, con un sistema de referencia. En notación de
subíndices, también conocida como notación tensorial, un tensor se expresa como aijk…, donde ijk...
pueden tomarlos valores 1,2,3,... Al número de subíndices se le conoce como orden del tensor y al
número (n) de valores que pueden tomar estos subíndices se le conoce como rango del subíndice. De
estas definiciones resulta evidente que un vector es un tensor de orden 1, recuérdese que puede ser
expresado como ai;. En el caso que nos ocupa en esta sección, estaremos utilizando Tensores
Cartesianos de Segundo Orden, los cuales pueden ser representados como aij.
Para entender el significado del tensor de esfuerzos, imaginemos un plano de área infinitesimal
perpendicular a uno de los ejes de referencia, digamos al eje X,. Un esfuerzo cualquiera que actúa
sobre dicho plano, puede ser descompuesto en las tres componentes paralelas a los ejes de referencia.
La componente perpendicular al plano será denominada , donde el primer subíndice indica el eje
al cual es perpendicular el plano sobre el que está actuando, y el segundo subíndice el eje a lo largo
del cual está actuando el esfuerzo. Habrá otra componente , que actúa sobre el mismo plano en la
dirección de Y, y una tercera, , que actúa sobre el mismo plano en la dirección de Z (Figura III.b).
Page 4 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.b.
Análogamente podemos obtener las componentes de los esfuerzos que actúan sobre planos
perpendiculares a Y y a Z, que forman las caras del cubo mostrado en la Figura III.b, con lo que
obtenemos el total de nueve componentes, las cuales definen totalmente el estado de esfuerzos que
actúa en un punto; estas son componentes son
Si los ejes del sistema de referencia son rotados hasta que los planos perpendiculares a ellos
sean a su vez perpendiculares al vector de esfuerzos que actúa sobre cada una de las caras, entonces
no habrá esfuerzos de cizalla sobre las caras del cubo; es decir para todo i ≠ j, quedando
solamente las componentes diagonales del tensor. A estas componentes que forman la diagonal se las
denomina componentes principales del tensor o “esfuerzos principales” del tensor y son representadas
por , , . En forma de matrices, el tensor en función de sus componentes
principales se escribe
.
Esta forma simplifica mucho el análisis de los esfuerzos, por lo que es comúnmente adoptada,
especialmente en el estudio de fallas en la Geología Estructural y se utiliza para definir la forma del
elipsoide de esfuerzos en términos de los esfuerzos principales, para ello se utiliza la “razón de
esfuerzos” .
Como se vio más arriba, es conveniente conocer los esfuerzos normal y de cizalla que actúan
sobre un plano, los cuales se obtienen fácilmente a partir de nuestro tensor el esfuerzo en fundón de
los esfuerzos principales; el normal está dado por:
, y el esfuerzo de cizalla por
, donde Si un el vector unitario paralelo al esfuerzo de cizalla. Cabe comentar que
comúnmente se asume que la estría de deslizamiento sobre el plano de falla es paralela al máximo
esfuerzo de cizalla sobre dicho plano, con lo cual la orientación de Si la obtenemos como dato de
campo.
Page 5 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
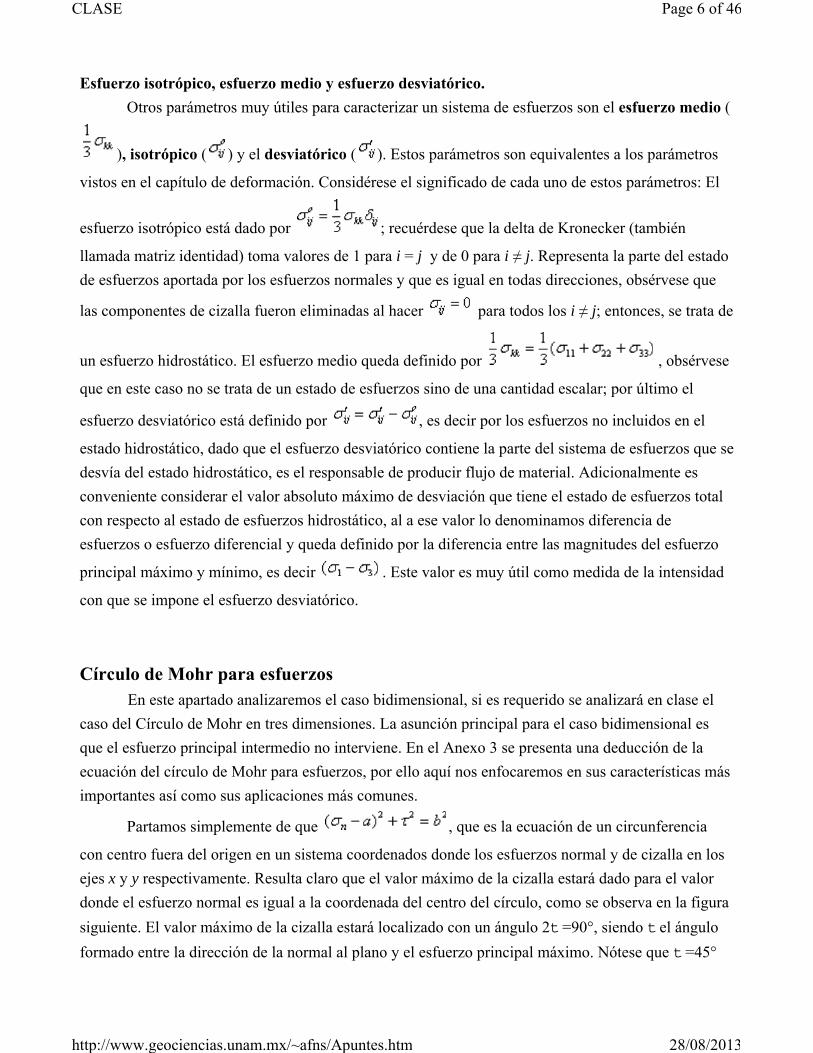
Esfuerzo isotrópico, esfuerzo medio y esfuerzo desviatórico.
Otros parámetros muy útiles para caracterizar un sistema de esfuerzos son el esfuerzo medio (
), isotrópico ( ) y el desviatórico ( ). Estos parámetros son equivalentes a los parámetros
vistos en el capítulo de deformación. Considérese el significado de cada uno de estos parámetros: El
esfuerzo isotrópico está dado por ; recuérdese que la delta de Kronecker (también
llamada matriz identidad) toma valores de 1 para i = j y de 0 para i ≠ j. Representa la parte del estado
de esfuerzos aportada por los esfuerzos normales y que es igual en todas direcciones, obsérvese que
las componentes de cizalla fueron eliminadas al hacer para todos los i ≠ j; entonces, se trata de
un esfuerzo hidrostático. El esfuerzo medio queda definido por , obsérvese
que en este caso no se trata de un estado de esfuerzos sino de una cantidad escalar; por último el
esfuerzo desviatórico está definido por , es decir por los esfuerzos no incluidos en el
estado hidrostático, dado que el esfuerzo desviatórico contiene la parte del sistema de esfuerzos que se
desvía del estado hidrostático, es el responsable de producir flujo de material. Adicionalmente es
conveniente considerar el valor absoluto máximo de desviación que tiene el estado de esfuerzos total
con respecto al estado de esfuerzos hidrostático, al a ese valor lo denominamos diferencia de
esfuerzos o esfuerzo diferencial y queda definido por la diferencia entre las magnitudes del esfuerzo
principal máximo y mínimo, es decir . Este valor es muy útil como medida de la intensidad
con que se impone el esfuerzo desviatórico.
Círculo de Mohr para esfuerzos En este apartado analizaremos el caso bidimensional, si es requerido se analizará en clase el
caso del Círculo de Mohr en tres dimensiones. La asunción principal para el caso bidimensional es
que el esfuerzo principal intermedio no interviene. En el Anexo 3 se presenta una deducción de la
ecuación del círculo de Mohr para esfuerzos, por ello aquí nos enfocaremos en sus características más
importantes así como sus aplicaciones más comunes.
Partamos simplemente de que , que es la ecuación de un circunferencia
con centro fuera del origen en un sistema coordenados donde los esfuerzos normal y de cizalla en los
ejes x y y respectivamente. Resulta claro que el valor máximo de la cizalla estará dado para el valor
donde el esfuerzo normal es igual a la coordenada del centro del círculo, como se observa en la figura
siguiente. El valor máximo de la cizalla estará localizado con un ángulo 2� =90°, siendo � el ángulo
formado entre la dirección de la normal al plano y el esfuerzo principal máximo. Nótese que � =45°
Page 6 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

en el espacio físico dado que en un espacio Mohr los ángulos son dobles, por ejemplo obsérvese que
�1 y �3 forman un ángulo de 180° en el espacio Mhor (Figura III.c.).
Figura III.c.
Un círculo Mohr representa un estado de esfuerzos, un punto en la circunferencia representa la
solución del estado de esfuerzos sobre un punto en un plano orientado de acuerdo con el ángulo �. La
circunferencia en su totalidad representa todos los planos paralelos a la dirección de �2 y que varían
en su ángulo de inclinación con respecto a �1.
Bibliografía: Bott, M. H. P., The mechanics of oblique slip faulting, Geol. Magazine, v. 96, p. 11-12Hafner, W. 1951, Stress distribution and faulting, Bulletin of the Geological Society of America, v. 62,p. 373-396Hubbert, M. K., 1981, Mechanics of Deformation of Crustal Rocks: Historical Development in Mechanical behavoir of
crustal rocks, The Handin volume, Carter, N. L., Friedman, M. Logan, J. M., Geophysical Monograph, 24, Nieto-Samaniego, A. F., Alaniz-Alvarez, S.A., Apuntes de Geología Estructural, (capítulo Paleotensor de esfuerzos) Twiss, R.J., and Moores, E.M., 1992, Structural Geology. New York, W.H. Freeman and Co., 532 p. (capítulo8 )
Deformación
Consideraciones iniciales.
- Materiales geológicos como medios heterogéneos y discontinuos.
En términos generales las rocas son medios heterogéneos y discontinuos. Esto se hace evidente
al analizar su naturaleza física en distintas escalas. Consideremos que los constituyentes de las rocas
son cristales y matriz, surgiendo así la heterogeneidad del cuerpo rocoso en la escala más pequeña. En
otra escala, las rocas presentan variaciones composicionales y texturales definidas por la naturaleza
misma de las rocas; por ejemplo en las rocas sedimentarias los estratos tendrán composiciones
diferentes, pudiendo ocurrir también variaciones laterales. Condiciones semejantes se tienen para las
rocas ígneas y metamórficas, donde los cambios composicionales tanto horizontales como verticales
Page 7 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

son la norma. Para el estudio de las deformaciones de los cuerpos rocosos, se analizan las
consecuencias mecánicas de los cambios en la composición de las rocas (heterogeneidades). Al
cambio espacial en el comportamiento mecánico de las rocas se lo denomina Anisotropía.
Una característica de las rocas es la presencia de discontinuidades, que son planos o zonas que
rompen la continuidad del medio; ejemplos de ellas son diaclasas, planos de estratificación, fallas,
foliaciones frágiles (pizarrosas), etc., cuya existencia está ligada a la génesis misma de los cuerpos de
roca y a su evolución a lo largo del tiempo geológico, y por lo tanto en la práctica podemos considerar
que siempre estarán presentes en la naturaleza.
Por lo anterior, podemos decir que un cuerpo rocoso es, en general, anisotrópico y discontinuo,
o que presenta discontinuidades.
- Mecánica del medio continuo, ¿por que se aplica?.
En el sentido más general, para estudiar las deformaciones de las rocas se utilizan dos
aproximaciones de la física (o física matemática), una de ellas la mecánica del medio continuo
(continuum-mechanics) y la otra la física del estado sólido. La primera de ellas enfoca el aspecto
geométrico y mecánico, considerando una escala meso y macroscopica; la segunda se enfoca sobre
los fenómenos ocurridos a nivel atómico y las consecuencias que éstos tienen, considerando cambios
mineralógicos, químicos o de índole similar que ocurren durante la deformación.
En la Geología Estructural utilizamos la mecánica del medio continuo, por lo que conviene
tener algún tipo de definición que nos sirva como marco de referencia: “un medio continuo (o
continuum) es una idealización de un medio en el que las partes que lo componen están localizadas
sin que haya “huecos” entre ellas, es decir, es un agregado continuo; adicionalmente, el tamaño de
dichas partes son suficientemente grandes para que las características atómicas del medio sean
negligibles y suficientemente pequeñas para que puedan ser consideradas puntos que ocupan una
posición en un sistema de coordenadas”. Las definiciones de los términos en negritas son precisadas
más adelante.
Ahora bien, si la mecánica del medio continuo no trata objetos discontinuos como lo son los
cuerpos de roca ¿porque usamos esta herramienta? La respuesta es más de carácter práctico: porque es
un esquema teórico sólidamente fundamentado, relativamente sencillo y que nos permite una
aproximación suficiente para la gran mayoría de las observaciones y para resolver los problemas que
enfrentamos en la Gelogía Estructural.
Es muy importante considerar que, al igual que en el caso de la diferencia entre la física del
estado sólido y la mecánica del medio continuo donde un elemento determinante es la escala, en el
primer caso atómica y sub-atómica y en el segundo macroscópica, podemos considerar como continuo
un medio si contiene discontinuidades “pequeñas” relativas al volumen total que estamos
considerando. Entonces poder tratar una roca como un medio continuo se reduce a un problema de
escala. Por ejemplo, en un granito existen numerosas fracturas pequeñas en la escala de los cristales,
hay crucero en los cristales y superficies intercristalinas que constituyen fracturas, todos estos
Page 8 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

elementos son discontinuidades, pero pueden ser ignoradas si trabajamos en escala de metros a
decenas de metros y podemos considerar que el cuerpo es continuo. El comportamiento mecánico del
granito será independiente de las fracturas a escala cristalina; podemos trabajar bajo esa
consideración. Sin embargo, si se consideran las diaclasas que típicamente hay en los cuerpos
graníticos cuyas dimensiones son de metros a centenas de metros, éstas tendrán un gran influencia en
el comportamiento mecánico del cuerpo granítico, considerando la ruptura como proceso de
deformación, seguramente esas diaclasas serán activadas como zonas de cizalla (fallas) durante la
deformación y ejerciendo un control importante en el proceso. Nuevamente, si cambiamos de escala y
consideramos la deformación del cuerpo granítico a la escala entre decenas kilómetros a cientos de
kilómetros, esas diclasas podrán ser ignoradas podremos tratar el cuerpo como un medio continuo.
Otra característica de los medios rocosos naturales que nos permiten hacer uso del medio
continuo es que las estructuras frágiles, que son discontinuidades del medio, se presentan en conjuntos
de numerosos miembros todos ellos asociados a un campo de deformación y considerados en conjunto
todos esos elementos frágiles, es posible aproximar el comportamiento de un medio continuo; esto se
ilustra en la Figura Ia. Definir si existen “numerosas estructuras” que constituyen un sistema de
deformación es nuevamente un asunto de la escala de observación. Una falla cuyas dimensiones son
de una escala cualquiera estará constituida por numerosas estructuras semejantes con dimensiones de
menor escala. Este aspecto escalado de las fracturas y fallas, y de muchos otros objetos geológicos, es
muy conocido por los geólogos ya que es una observación cotidiana durante el trabajo de campo.
De las consideraciones anteriores surge, de una manera intuitiva, una de las ideas
fundamentales de la geología, el carácter escalado de muchos de los objetos geológicos, lo cual nos
lleva de manera natural a considerar que un estudio más completo de cualquier objeto geológico debe
ser multiescalar y ese cambio de escala nos permite utilizar la mecánica del medio continuo sin
perdida de objetividad.
I.2. Definiciones:- Marco de Referencia.
Región del espacio físico que se considera fija.
- Sistemas de Coordenadas.
Sistema de referencia fijo con respecto a l marco de referencia. Puede considerarse un número
cualquiera de sistemas de coordenadas para un mismo Marco de referencia..
- Partícula.
Pequeñas partes de material.
- Punto.
Objeto geométrico que se define por una posición en el sistema de coordenadas.
- Posición.
Coordenadas del punto.
Page 9 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Vector posición del punto.
- Velocidad instantánea.
Vector con origen en un punto, que indica la dirección, sentido y magnitud del movimiento de
dicho punto.
- Campo de velocidades instantáneas.
Conjunto de vectores de velocidad instantánea de un cuerpo.
- Tensor de gradientes de velocidad.
En un campo de velocidades homogéneo (líneas rectas paralelas se mantienen paralelas)
tenemos que las componentes del vector velocidad están dadas por:
Estado inicial.
Conjunto de posiciones que guardan los puntos en el tiempo t0
Estado final.
Conjunto de posiciones que guardan los puntos en el tiempo t1
Desplazamiento.
Cambio de posición de un punto.
Puede ser infinitesimal (minúsculo) o finito (grande) y es susceptible de ser representado por
un vector que queda definido por los vectores posición de los estados inicial y final.
En coordenadas, un desplazamiento se expresa:
,
y en vectores:
,
donde i y f indican los estados inicial y final, respectivamente Figura Ia.
Page 10 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura Ia. Esquema que ilustra el cambio de posición de un punto desde la posición i hasta la f. Ese cambio de posición puede expresarse por el cambio en el valor de las coordenadas xx y yy de acuerdo con las
cantidades a y b, o bien por el vector desplazamiento .
Campo de desplazamientos.
Conjunto de vectores desplazamiento que muestran los cambios de posición de los puntos
entre los tiempos t0 y t1
Desplazamiento Homogéneo y Traslación.
Todos los son iguales.
Desplazamiento Heterogéneo
Todos o algunos de los son distintos.
Deformación. Cambio de posición de las partículas de un objeto entre los estados inicial y
final. Podemos representar la deformación por un campo de desplazamientos. De ahí se deduce que
puede haber cambios de posición de las partículas con respecto al marco de referencia así como
cambio de posición relativo entre ellas (distorsión).
Deformación Lineal. Para medir la deformación lineal se hace uso de distintos parámetros, los más
utilizados en la literatura geológica son los siguientes: La deformación lineal se refiere al cambio de
longitud experimentado por una línea después de ser deformada. Esto puede representarse por:
Extensión (e): Es el cambio de longitud por unidad de longitud.
Elongación (stetch): Es la razón de la longitud post-deformación con respecto a la longitud inicial.
Elongación cuadrática (�). Es el cuadrado de la longitud de una línea originalmente unidad.
Distorsión natural o logarítmica (�). Este parámetro surge de la consideración de que la extensión total
se acumula por la suma de muchas pequeñas extensiones y se define por:
,
y si se consideran incrementos infinitesimales se obtiene:
Page 11 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

. Esta medida es útil, considérese que cuando una línea se acorta
enormemente, ��tiende a -∞ mientras que e tiende a -1. La variación de e para deformaciones muy
grandes entre -∞ y +∞ es más representativa que límites de e.
Deformación angular por cizalla ψ (psi). Se define como la desviación angular que sufren dos rectas
originalmente ortogonales.
Deformación por cizalla (γ). Se define como la tangente de la deformación angular por cizalla:
γ = tan ψ .
Deformación Homogénea.
La deformación homogénea queda definida por las siguientes características:
Las líneas paralelas en el estado inicial siguen siendo paralelas en el estado final.
Las líneas paralelas en el estado inicial permanecen paralelas en el estado final.
Las líneas con la misma dirección en el cuerpo deformado tienen los mismos valores de e, λ, ψ,
y γ.
Deformación Heterogénea
Las líneas paralelas en el estado inicial no son paralelas (al menos algunas) en el estado final.
Las líneas rectas en el estado inicial se convierten en curvas en el estado final.
Los valores de e, λ, ψ, y γ son variables para cualquier dirección dada del cuerpo en el estado
deformado.
Se puede ver con facilidad que la deformación homogénea es un caso especial de la
deformación heterogénea o sea de la deformación general. Aunque distintos grados de deformación
heterogénea está presente en los objetos geológicos deformados, en la gran mayoría de los casos sus
deformaciones que se aproximan mucho a la homogénea. También se debe considerar que un cambio
de escala puede hacer que el cuerpo deformado se aproxime mucho a la deformación homogénea,
como se ilustra en la Figura Ib.
Page 12 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura Ib. Obsérvese que en conjunto el cuadrado ha sufrido deformación heterogénea, pero las figuras que están dentro de él han sufrido deformación heterogénea o bien homogénea según su tamaño.
Bibliografía: Ramsay, J.G., 1967, Folding and fracturing of rocks: New York, McGraw-Hill, 568 p.Marshak S. y Mitra, G., 1988, Basic Methods of Structural Geology, Perentice Hall, 446p. (Capítulo 15)Means, W. D., 1990, Review paper: Kinematics, stress, deformation and material behavior, Journal of Structural Geology,
v. 12, p. 953-971Marrett, R., y Peacock, D. C. P., 1999, Strain and stress, Journal of Structural Geology, v. 21, p. 1057-1063.DePaor, D. G., 1983, Orthographic analysis of geologic structures, I. Deformation theory, Journal of Structural Geology,
v. 5, p. 255-278. Elliot, D. 1972. Deformation paths in structural geology, Geological Society of America Bulletin, v. 83, p. 2621-2638.Simpson, C. y De Paor, D., 1991, Deformation and kinematics of high strain zones, Short course notes, 1991 Annual GSA
meeting-San Diego.
Elipsoide de Deformación (Distorsión):
-Si en el estado no deformado consideramos una esfera, al deformar el cuerpo por medio de una
deformación homogénea, entonces el círculo se transformará en un elipsoide; a este elipsoide se lo
denomina elipsoide de deformación. Si se trabaja enun espacio bidimensional, se obtiene una elipse,
denominada elipse de deformación.
- Si realizamos la operación contraria, consideramos una esfera en el estado deformado y luego
retrodeformamos el cuerpo hasta su estado no deformado, entonces obtenemos el elipsoide de
deformación recíproca.
Como cualquier elipsoide, el elipsoide de deformación tiene tres planos de simetría especular.
Las intersecciones de esos planos forman los tres diámetros principales del elipsoide, los cuales
constituyen las direcciones principales de distorsión. Para expresar dichas direcciones se utiliza
comúnmente al letra lambda λi y se considera que la esfera original fue de radio unitario, por lo que
los radios del elipsoide están definidos por las elongaciones sobre las direcciones principales λi½.
Page 13 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Un parámetro que define la forma de cualquier elipse es la razón de sus radios, a lo cual se le
denomina elipticidad ( R ), la que en el caso de la elipse de deformación está dada por: .
******************************
Demostración. Ecuación de la elipse de deformación interna o distorsión)
Figura Ic. Esquema mostrando las relaciones de los desplazamientos ocurridos durante una deformación homogénea de un cuadrado.
De la figura Ic, podemos ver que
; , donde a,b, c y d son coeficientes que modifican a las variables x y y. Los
valores de cada una de ellas son:
; ; ; .
De lo anterior podemos establecer la ecuación general del desplazamiento usando notación de
subíndices.
. En notación de matrices sería
Ahora podemos aplicar nuestra ecuación de desplazamiento a cualquier objeto geométrico, lo
aplicamos a una circunferencia de radio unitariocuya ecuación es , la cual representa
nuestro estado no deformado y obtenemos la ecuación general de una elipse (se omiten los pasos de la
solución por simplicidad, pero pueden consultarse en la bibliografía recomendada)
Page 14 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

******************************
Tipos de distorsión:
- Uniaxica: Solamente una dirección principal tiene elongación
- Biaxica: Solamente dos dirección principal tiene elongación; también se le llama distorsión
plana.
- Triaxica: Las tres dirección principal tiene elongación: Se pude clasificar de acuerdo con las
relaciones que guardan las magnitudes de elongación en las direcciones principales.
Consideremos con fines ilustrativos el caso bidimensional de acuerdo con las figuras Id.
Figura Id. El círculo rojo representa el estado no deformado, en a se ilustra una elipse de distorsión uniaxica y en b una
distorsión biaxica.
Debe considerarse que en el caso de la Figura Id-a, el círculo no experimentó deformación en
su eje vertical, es decir la forma elíptica no implica necesariamente deformación en sus dos ejes. Estas
características se extienden directamente al caso tridimensional.
Por otra parte, de la Figura Ie se ve fácilmente que en la elipse siempre se puede trazar un círculo que
quede contenido el ella, si se compara ese círculo con el círculo original del estado no deformado
obtendremos un cambio de área, o de volumen si consideramos tres dimensiones. A la deformación
que produce este cambio de área o volumen lo denominamos la parte isotrópica de la deformación y
al resto, representado por las pastes de la elipse que quedan fuera del cambio de área del círculo, la
denominamos la paste desviatórica de la deformación.
En general, un elipsoide de deformación puede deformarse por un cambio de volumen
(deformación isotrópica) o bien adquirir dos formas fundamentales denominadas Prolada como
aparece en la Figura Ie-a y Oblada como aparece en la Figura If-b
Figura If. Una elipse de deformación puede adquirir dos formas fundmentales, de “cigarro” denominada prolada (a) o
bien de “plato, denominada oblada (b).
Page 15 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Las formas de las elipses de deformación son analizadas cuantitativamente utilizando los
diagramas de Flinn (Figura Ig). En estos diagramas se pueden separar dominios en los que se
producen estructuras planares y estructuras lineales, de acuerdo con las magnitudes relativas de
elongación en los ejes principales de la deformación. Algunas características de los distintos dominios
serán tratadas en el aula.
Figura Ig. Diagrama de Flinn
Componentes de la deformación.La deformación general de un cuerpo está podemos definirla como el cambio de posición de
las partículas que lo constituyen. De esta definición general se puede ver que, si todas las partículas se
mueven con respecto a un sistema de referencia, pero se mantienen sin movimiento relativo entre
ellas, ese evento quedar comprendido dentro de nuestra definición. Este tipo de deformación es un
caso especial, cuya característica es que el objeto se comporta como un cuerpo rígido.
Analizando las maneras en que puede ocurrir la deformación de cuerpo rígido, se hace
evidente que hay dos modos fundamentales; debe recordarse que en ambos casos las partículas que
forman el objeto mantienen las distancias relativas entre ellas. En modo es en el que los vectores de
desplazamiento de todas las partículas son paralelos y de la misma magnitud, al cual se lo
denominado traslación; el otro es aquel en el que los vectores de desplazamiento son no paralelos y de
distinta magnitud, al que se denomina rotación de cuerpo rígido o Espín.
Regresando a nuestra definición general, vemos que puede ocurrir también movimiento
relativo entre las partículas que conforman el objeto deformado, a esto se le denomina deformación
interna o distorsión. Su expresión más elemental es el cambio entre la distancia que existe entre dos
partículas, que se queda expresada por la elongación.
Page 16 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Considérense separadamente dos de las partículas que constituyen un cuerpo en el tiempo to, y
la posición que esa partícula ocupa en el tiempo t1 después de ocurrida una deformación. De acuerdo
con lo discutido en los párrafos anteriores, el desplazamiento de esa partícula puede descomponerse
en un movimiento de traslación, uno de rotación y una elongación. Si se consideran todas las
partículas del cuerpo, decimos que el conjunto de vectores de desplazamiento correspondientes a las
partículas de ese cuerpo constituyen el campo de deformación de ese evento (Figura Ih).
Figura Ih. Las flechas muestran los desplazamientos de varias partículas el cuerpo deformado. El conjunto de vectores de
desplazamiento de todas las partículas constituye el campo de deformación finita.
Una restricción muy importante considerada comúnmente en el análisis de la deformación de
los cuerpos rocosos es que el volumen se mantiene. Sabemos que en la naturaleza hay varios
mecanismos de transferencia de material y el cambio de volumen que ocurre deberá ser considerado
en algunos casos. Con fines de simplicidad y claridad, en este punto de nuestro análisis asumiremos
que el cuerpo se deforma sin cambio de volumen.
Generalizando los conceptos anteriores, decimos que las componentes principales de la
deformación son tres: Traslación, Rotación (también llamada vorticidad) y Elongación.
Las definiciones anteriores permiten obtener una idea clara de lo que es la deformación y
permiten visualizar cómo abordar su análisis. En un campo de deformación homogénea podemos
localizar dos ejes (tres en tres dimensiones) a lo largo de los cuales ocurren el mayor alargamiento y
el mayor acortamiento; es decir, elongaciones mayores y menores que uno, respectivamente. Por lo
pronto consideraremos solamente dos dimensiones, entonces esos ejes corresponden a los ejes
principales de la elipse de deformación y a los eigenvectores (vectores característicos) del tensor de
deformación y son denominados ejes principales de la deformación.
Considerando la manera en que ocurre la deformación con respecto a los ejes de la
deformación, podemos clasificarla en deformación coaxial o irrotacional y deformación no coaxial o
rotacional, más comúnmente denominadas en Geología Estructural como Cizalla Pura y Cizalla
Simple (esta última es en realidad un tipo especial de deformación rotacional), respectivamente.
Cualquier deformación homogénea (recuérdese que son deformaciones sin cambio de volumen)
Page 17 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
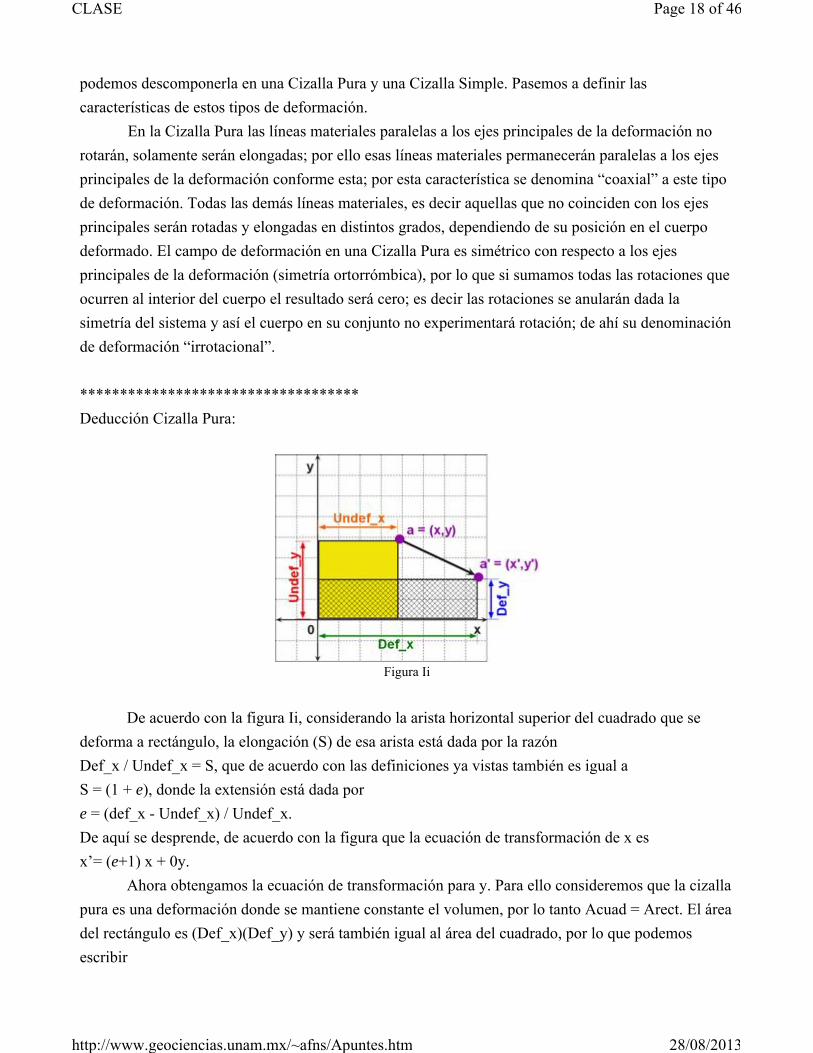
podemos descomponerla en una Cizalla Pura y una Cizalla Simple. Pasemos a definir las
características de estos tipos de deformación.
En la Cizalla Pura las líneas materiales paralelas a los ejes principales de la deformación no
rotarán, solamente serán elongadas; por ello esas líneas materiales permanecerán paralelas a los ejes
principales de la deformación conforme esta; por esta característica se denomina “coaxial” a este tipo
de deformación. Todas las demás líneas materiales, es decir aquellas que no coinciden con los ejes
principales serán rotadas y elongadas en distintos grados, dependiendo de su posición en el cuerpo
deformado. El campo de deformación en una Cizalla Pura es simétrico con respecto a los ejes
principales de la deformación (simetría ortorrómbica), por lo que si sumamos todas las rotaciones que
ocurren al interior del cuerpo el resultado será cero; es decir las rotaciones se anularán dada la
simetría del sistema y así el cuerpo en su conjunto no experimentará rotación; de ahí su denominación
de deformación “irrotacional”.
***********************************
Deducción Cizalla Pura:
Figura Ii
De acuerdo con la figura Ii, considerando la arista horizontal superior del cuadrado que se
deforma a rectángulo, la elongación (S) de esa arista está dada por la razón
Def_x / Undef_x = S, que de acuerdo con las definiciones ya vistas también es igual a
S = (1 + e), donde la extensión está dada por
e = (def_x - Undef_x) / Undef_x.
De aquí se desprende, de acuerdo con la figura que la ecuación de transformación de x es
x’= (e+1) x + 0y.
Ahora obtengamos la ecuación de transformación para y. Para ello consideremos que la cizalla
pura es una deformación donde se mantiene constante el volumen, por lo tanto Acuad = Arect. El área
del rectángulo es (Def_x)(Def_y) y será también igual al área del cuadrado, por lo que podemos
escribir
Page 18 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
(Def_x)(Def_y) = (Undef_x)(Undef_y), y entonces
(Def_x) / (Undef_x) = (Undef_y) / (Def_y), y de acuerdo con lo definido arriba para la elongación
también podemos escribir
(e+1)-1 = (Def_y) / (Undef_y)
La coordenada en y después de la deformación para el punto analizado es proporcional a la
elongación e independiente de la coordenada x, por lo que podemos escribir
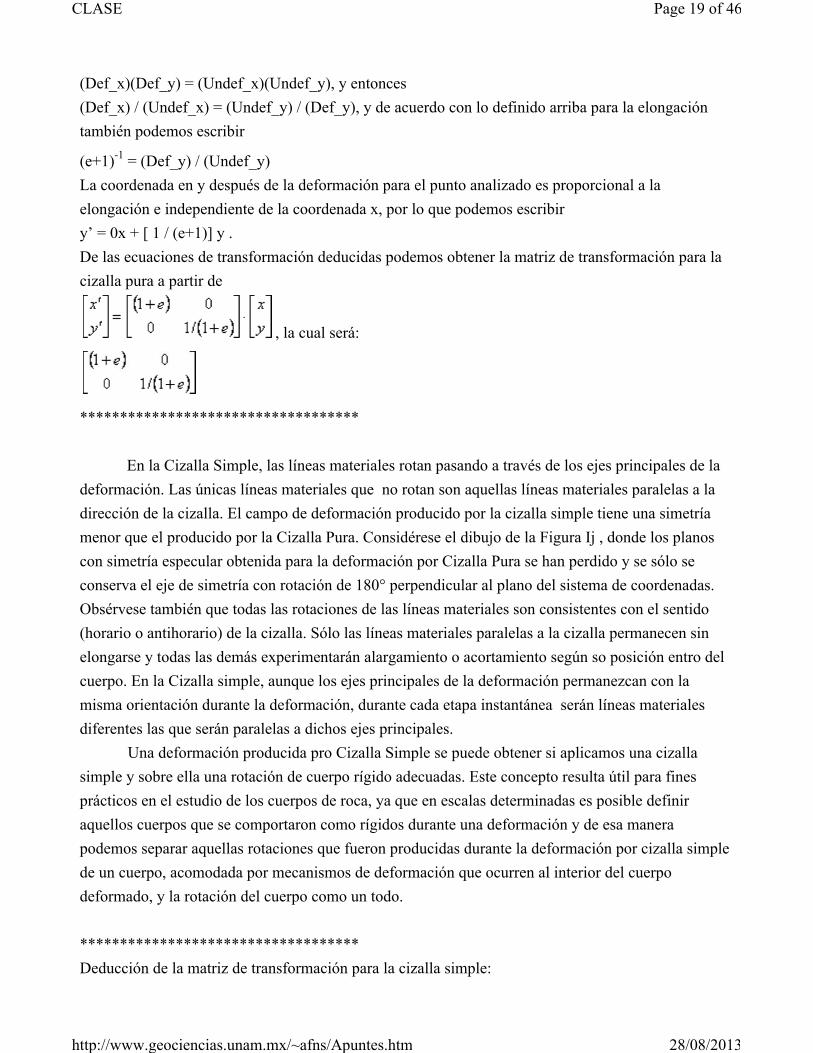
y’ = 0x + [ 1 / (e+1)] y .
De las ecuaciones de transformación deducidas podemos obtener la matriz de transformación para la
cizalla pura a partir de
, la cual será:
***********************************
En la Cizalla Simple, las líneas materiales rotan pasando a través de los ejes principales de la
deformación. Las únicas líneas materiales que no rotan son aquellas líneas materiales paralelas a la
dirección de la cizalla. El campo de deformación producido por la cizalla simple tiene una simetría
menor que el producido por la Cizalla Pura. Considérese el dibujo de la Figura Ij , donde los planos
con simetría especular obtenida para la deformación por Cizalla Pura se han perdido y se sólo se
conserva el eje de simetría con rotación de 180° perpendicular al plano del sistema de coordenadas.
Obsérvese también que todas las rotaciones de las líneas materiales son consistentes con el sentido
(horario o antihorario) de la cizalla. Sólo las líneas materiales paralelas a la cizalla permanecen sin
elongarse y todas las demás experimentarán alargamiento o acortamiento según so posición entro del
cuerpo. En la Cizalla simple, aunque los ejes principales de la deformación permanezcan con la
misma orientación durante la deformación, durante cada etapa instantánea serán líneas materiales
diferentes las que serán paralelas a dichos ejes principales.
Una deformación producida pro Cizalla Simple se puede obtener si aplicamos una cizalla
simple y sobre ella una rotación de cuerpo rígido adecuadas. Este concepto resulta útil para fines
prácticos en el estudio de los cuerpos de roca, ya que en escalas determinadas es posible definir
aquellos cuerpos que se comportaron como rígidos durante una deformación y de esa manera
podemos separar aquellas rotaciones que fueron producidas durante la deformación por cizalla simple
de un cuerpo, acomodada por mecanismos de deformación que ocurren al interior del cuerpo
deformado, y la rotación del cuerpo como un todo.
***********************************
Deducción de la matriz de transformación para la cizalla simple:
Page 19 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Considérese la Figura Ij, de donde se obtiene que ; y como se definió con
anterioridad que , podemos escribir .
Figura. Ij
Usando un sistema de coordenadas con el eje x paralelo a la dirección de la cizalla el cambio
de posición de un punto cualquiera debido a la cizalla simple estará definido como
,
de donde obtenemos la matriz de transformación para la cizalla simple
.
***********************************
A manera de síntesis considérense las clasificaciones siguientes como una guía para identificar
las componentes de la deformación observada en los cuerpos de roca.Clasificación (a)
(a) Traslación(b) Vorticidad o Rotación:
Espín (rotación de cuerpo rígido)RID (Rotación inducida por distorsión)
(c) Elongación
Clasificación (b)Componentes de cuerpo rígido:
a) Traslación.b) Espín
Componentes de cuerpo deformadoa) Elongación
RID (Rotación inducida por distorsión)
Page 20 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Comportamiento de elementos estructurales lineales y planos durante la deformación.
Bibliografía: Tolson, G. 1992, Cizalla Simplemente Pura, Cizalla Puramente Simple y Combinaciones de Ambas: Las Matemáticas de
Deformación y su Aplicación a la Geología Estructural, Unidad Teórica, Posgrado de GeofísicaRamsay, J.G., 1967, Folding and fracturing of rocks: New York, McGraw-Hill, 568 p.
Partición de la Deformación.
Para de analizar la partición de la deformación sobe fallas y fracturas requerimos hacer unas
consideraciones previas:
Para analizar la deformación que general las fallas consideraremos a una falla como un sistema de
deformación que consiste de un plano (plano de la falla) y de vector de deslizamiento que actúa sobre
dicho plano. Ese sistema de deformación liberará necesariamente deformación bidimensional
rotacional. Bidimensional porque no habrá elongación en una dirección perpendicular al vector de
deslizamiento y localizada sobre el plano de la falla; y rotacional porque el cuerpo experimentará una
rotación en su conjunto sobre un eje perpendicular al vector de deslizamiento y en un sentido
compatible con dicho vector; lo anterior se ilustra en la Figura Il.
Figura Il. Se ilustra el sistema de deformación generado por una sola falla. En a se puede deducir que no habrá
deformación perpendicular al vector de desplazamiento, mientras que en b se observa la rotación producida por el
deslizamiento.
Si consideramos el caso general de una deformación bidimensional rotacional y de acuerdo
con lo expuesto anteriormente, esperamos que exista un sistema de cizalla que libere más
eficientemente dicha deformación, por medio de una falla con vector de deslizamiento oblicuo.
Supóngase ahora que el plano de falla a lo largo del cual se liberará la deformación ya existe, esto
quiere decir que las orientaciones de los vectores de deslizamiento están sujetas a las permitidas por la
Page 21 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

superficie del plano de falla (aquellas que están contenidas el él). Para liberar la deformación con un
solo sistema de cizalla, el vector de deslizamiento deberá ser perpendicular a la dirección principal de
elongación nula, como se mostró en la Figura Il. Sin embargo, dado que la orientación del plano ya
está determinada, es posible que las direcciones permitidas impidan la liberación total de la
deformación impuesta, o bien que haya otros sistemas que liberen la deformación de manera más
eficiente. Si este es el caso se producirán nuevos sistemas de cizalla sobre otra falla existente, o bien
se pueden general nuevas fallas, y todos los sistemas actuarán simultáneamente para acomodar la
deformación de la manera más eficiente. Cuando esto ocurre se dice que la deformación ha sido
particionada.
Figura Im. Modelo idealizado de dos fallas que particionan una deformación plana rotacional. Las variables
críticas son: los ángulos de convergencia (acortamiento) y el ángulo de inclinación de la falla busante. Obsérvese que la
dirección de deslizamiento sober la falla vertical es horizontal mientras que en la falla inclinada es oblicua.
Se han propuesto varias maneras de medir la eficiencia relativa de los sistemas de cizalla, en
general se asume que se activarán aquellos sistemas de cizalla cuya suma minimice la energía
disipada (o la cantidad de cizalla). Considérese por ejemplo el caso de un plano inclinado y uno
vertical, que en un esquema de tectónica de placas ocurre comúnmente en zonas de convergencia
oblicua (Figura Im). En la literatura al respecto, comúnmente se asume que la falla vertical tendrá un
desplazamiento de tipo lateral y la falla inclinada un desplazamiento de tipo inverso u oblicuo. Lo
anterior se basa en observaciones realizadas en numerosas zonas de convergencia oblicua (e. g. Jones,
C. H., and Wesnousky, S. G., 1992, Variations in strength and slip rate along the San Andreas Fault
System: Science, v. 256, p. 83-86).
Se hace necesario definir una variable geométrica que minimice la energía disipada, por
ejemplo se puede elegir el ángulo formado entre el vector de deslizamiento y la horizontal, medido
sobre el plano de la falla inclinada. Entonces se busca una ecuación de la forma
,
siendo
,
Page 22 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

donde es el vector de convergencia, el ángulo entre el vector de convergencia y el rumbo de las
fallas, el echado de la falla inclinada. Pueden utilizarse otras variables que se consideren adecuadas
al modelo cinemático que se esté analizando.
Estos esquemas de partición de la deformación son bastante rígidos ya que imponen
numerosas restricciones al modelo cinemático. Una aproximación más general, aún no explorada, es
el uso de la teoría de deformación plástica por deslizamiento sobre planos (gliding) propuesta por
Taylor (1938) y Bishop & Hill (1951). Esta teoría fue aplicada por Oertel (1965) para explicar las
fracturas formadas en pasteles de arcilla y por Reches (1978) para explicar el origen de los patrones
ortorrómbicos de fallas, los cuales se generan en campos de deformación tridimensional irrotacional.
Actualmente, en el Instituto de Geología de la UNAM, se desarrolla un proyecto de investigación
sobre la aplicación de esta teoría a un cuerpo de roca que contiene varios planos de debilidad
susceptibles de liberar la deformación. Basados en esta teoría, se podrán considerar en el análisis
cinemático un número más grande de sistemas de cizalla, representados por fallas en el caso de la
corteza terrestre. El modelo asumirá que será preferida aquella combinación de sistemas de cizalla que
acomode la deformación impuesta con el mínimo de energía disipada. Se podrá considerar que las
fallas tienen deslizamiento simultáneo, o que se activaron por grupos en fases distintas de un evento
de deformación.
Actividades a desarrollar en el aula:1. Uso del programa FluDef. Explicación y manipulación para entender su funcionamiento y
familiarizarse con su manejo.
2. Calcular las componentes de la matriz de deformación para los casos siguientes:
- Un a deformación isotrópica con cambio de volumen de + 50%.
- Una rotación de cuerpo rígido de 225° en sentido de las manecillas del reloj.
- Una cizalla simple que produzca una rotación de 25° en el sentido de las manecillas del reloj.
- Una cizalla pura que produzca una elongación de 150% en la horizontal.
- Simular la deformación que produce una falla normal con deslizamiento igual al 25% de la
arista del cubo que deforma.
Bibliografía: Jones, C. H., and Wesnousky, S. G., 1992, Variations in strength and slip rate along the San Andreas Fault System:
Science, v. 256, p. 83-86.Kostrov, B. V. 1974, Seismic moment and energy of earthquakes, and seismic flow of rock: Izv. Acad. Sci. USSR Phys.
Solid Earth, v. 1, p. 23-44.Krantz, R. W., 1988, Multiple fault sets and three-simensional strain: theory and application: Journal of Structural
Geology, v.10, p. 225-237.Nieto-Samaniego, A. F., Alaniz-Álvarez, S. A. y Labarthe-Hernández, G., 1997, Deformación Cenozoica en la parte sur
de la Mesa Central, México, Revista Mexicana de Ciencias Geológicas, v. 14, p. 13-25.Reches, Z., 1978, Analysis of faulting in three-dimensional strain fields. Tectonophysics, v. 47, p. 109-129.Reches, Z., 1983, Faulting of rocks in three-dimensional strain fields, II: Theoretical analysis. Tectonophysics, v. 95, p.
133-156.
Page 23 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

II.6. Tensor de deformaciónPara el estudio de la deformación utilizando el cálculo tensorial es conveniente establecer la
diferencia entre la deformación infinitesimal y la deformación finita. Decimos que una deformación
infinitesimal es aquella extremadamente pequeña y que podemos asociar con un fenómeno
instantáneo. El análisis de la deformación infinitesimal tiene la ventaja de ser sencillo y podemos
considerar en muchos casos que se ajusta a la naturaleza por ser muy pequeña en relación con la
escala de trabajo. La deformación instantánea también es una forma de expresar la deformación
infinitesimal y tiene la ventaja de permitirnos conocer que sucede durante el evento de deformación.
Por otra parte la deformación finita se refiere a deformaciones “grandes”, que se deducen de los
estados inicial y final de deformación entre los cuales se considera ocurrió la totalidad del evento
deformacional. Los tensores de deformación infinitesimal y finita son semejantes, sin embargo tienen
diferencias importantes que se verán posteriormente a la deducción del tenso rde deformación
infinitesimal.
Figura Ik. Esquema de una deformación general. Se asume que los puntos se movieron como lo indican los vectores de
desplazamiento.
Considérese la Figura Ik, en ella se observa que un cuerpo cualquiera ha sido deformado y
analizaremos lo que ocurre a dos puntos dentro de ese cuerpo. Los puntos son P(xi) y Q(xi+dxi); esos
puntos después de la deformación pasan a P’(x+ui) y Q’(xi+dxi+ui+dui). Donde ui y ui+dui son los
desplazamientos de P y Q respectivamente. Dado que la deformación interna de un cuerpo se refiere
al cambio de posición relativa de las partículas que lo constituyen, podemos utilizar cualquiera de
ellas para definir el vector de traslación de dicho cuerpo; en nuestro caso elegimos ui como la
componente trasnacional del cuerpo, que es igual para ambos puntos, y entonces dui es la diferencia
de desplazamiento entre ambos puntos inducida por la elongación y la rotación.
Page 24 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Asumamos ahora que las partículas son adyacentes y que las diferencias de desplazamiento
son muy pequeñas, también que los desplazamientos son una función continua sobre los tres ejes
coordenados, entonces podemos considerar que el vector desplazamiento y en consecuencia sus
componentes varían de manera continua sobre cada uno de los ejes xi, por lo cual podemos escribir la
ecuación del tensor de gradientes de desplazamiento
, de la que podemos obtener el desplazamiento diferencial entre dos puntos cualquiera del cuerpo; ese
desplazamiento diferencial representa la distorsión del cuerpo.
Un tensor asimétrico de segundo orden, como lo es el tensor de gradientes de desplazamiento siempre
puede representarse (o descomponerse) en la suma de un tensor simétrico y uno antisimétrico. Un
tensor simétrico es tal que aij=aji y uno antisimétrico aquel en que aij=-aji, por lo que podemos escribir
aij = ½ (aij+aji) + ½ (aij-aji), que en nuestro caso será
En notación de matrices el tensor asimétrico de la distorsión se escribe:
, donde la matriz de transformación es un tensor asimétrico, el cual podemos descomponerlo en uno
simétrico
, en el cual los términos que están que tienen ½ y
ocupan posiciones opuestas en la matriz tienen igual valor. A este tensor lo denominamos tensor de
distorsión y lo definimos por . La parte antisimétrica será
Page 25 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

, nótese que la diagonal es cero; a este tensor lo
denominamos el tensor de rotación o de vorticidad y lo definimos como .
Regresando a nuestro planteamiento inicial, la expresión total de la deformación será:
En esta expresión podemos ver que se encuentran separadas las componentes de la
deformación que se vieron anteriormente desde un punto de vista geométrico, estas son las partes de
traslación, de distorsión y de rotación. Si requiriéramos analizar el cambio de posición de un solo
punto nos bastaría con la parte de traslación ui; si consideramos el caso irrotacional de la deformación,
por ejemplo en un graben simétrico, requerimos solamente el tensor y si consideramos un caso
rotacional, como es el de una sola falla o un graben asimétrico requerimos ambos el tensor de
distorsión y el de rotación .
Cuando analizamos el elipsoide de deformación vimos que se puede identificar una parte
isotrópica de la deformación, así como una desviatórica, las cuales se identificaron usando la elipse de
deformación. La expresión matemáticas de estas dos componentes de la deformaci´n es la siguiente:
Definamos primero la “delta de Kronecker”, es un operador denominado por la letra , y que tiena la
propiedade de ser igual a 0 para todos los casos en que i ≠ j y adquiere el valor 1 para todos los casos
en que i = j . Entonces definimos la parte isotrópica como
;
(recuérdese que la convención de suma nos dice que ; a se le conoce como la
dilatación cúbica). Y la parte desviatórica será la diferencia de la parte isotrópica con la distorsión
total, la cual representa el cambio de forma, y está dada por
.
Con fines didácticos reduciremos a dos dimensiones los ejercicios en el aula, con lo cual los
tensores tendrán solamente cuatro componentes.
Nota:
Page 26 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Para un entendimiento más completo del siguiente apartado se recomienda la lectura complementaria
01 (Anexo) (Nieto-Samaniego, A. F., 1996, Principios teóricos del fallamiento frágil por cizalla. Parte
I: la deformación bidimensional: Unión Geofísica Mexicana, Geos, v. 16, p. 146-151).
Adicionalmente, puede estudiar la lectura complementaria 02 (Anexo), en el que se deduce el Círculo
de Mohr para el estado deformado, esta herramienta es muy útil en el análisis de las deformaciones,
aunque no es tan común su uso.
Bibliografía: Means, W. D., 1990, Review paper: Kinematics, stress, deformation and material behavior, Journal of Structural Geology, v. 12, p. 953-971Fossen, H., y Tikoff, B., 1993, The deformation matrix for simultneous simple shearing, pure shearing and volume change and its application to transpression-transtension tectonicsRamsay, J.G., 1967, Folding and fracturing of rocks: New York, McGraw-Hill, 568 p.
Mecanismos de deformación. Bibliografía: Means, W. D., 1995, Shear zones and rock history, Tectonophysics, v. 247, p. 157-160.Twiss, R.J., and Moores, E.M., 1992, Structural Geology. New York, W.H. Freeman and Co., p. 50-71
Análisis fenomenológico de la respuesta de las rocas al esfuerzo.
Criterio de CoulombEn una primera aproximación podemos suponer que un cuerpo se romperá por cizalla
(diaclasas de cizalla y fallas) debido al esfuerzo de cizalla y por ello a lo largo de plano que contenga
a éste. De ahí se desprende una primera idea de que la ruptura ocurrirá donde la cizalla sea máxima (la
parte más alta del círculo de Mohr). Sin embargo, para que el deslizamiento ocurra por cizalla hay que
vencer la fuerza friccional que se resiste al deslizamiento entre los planos, y recordemos que esta
fuerza friccional es proporcional al esfuerzo normal aplicado, el factor de proporcionalidad es
conocido como coeficiente de fricción interna. Entonces, la ruptura por cizalla ocurrirá en donde la
relación entre el esfuerzo de cizalla que induce el deslizamiento iguale a la fuerza friccional que
impide el deslizamiento. Expresando lo anterior a manera de ecuación escribimos,
, donde es el “coeficiente de fricción interna” del cuerpo.
En el espacio Mhor la ecuación anterior es una recta que pasa por el origen y que tiene una pendiente
igual al valor del coeficiente de fricción interna.
La experiencia nos dice que una roca presentará una resistencia a la ruptura por cizalla aunque
no exista esfuerzo normal, a ese valor de la cizalla se le conoce como cohesión, y deberá ser vencido
por la cizalla para que tenga lugar la fractura. Considerando lo anterior podemos escribir:
Page 27 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
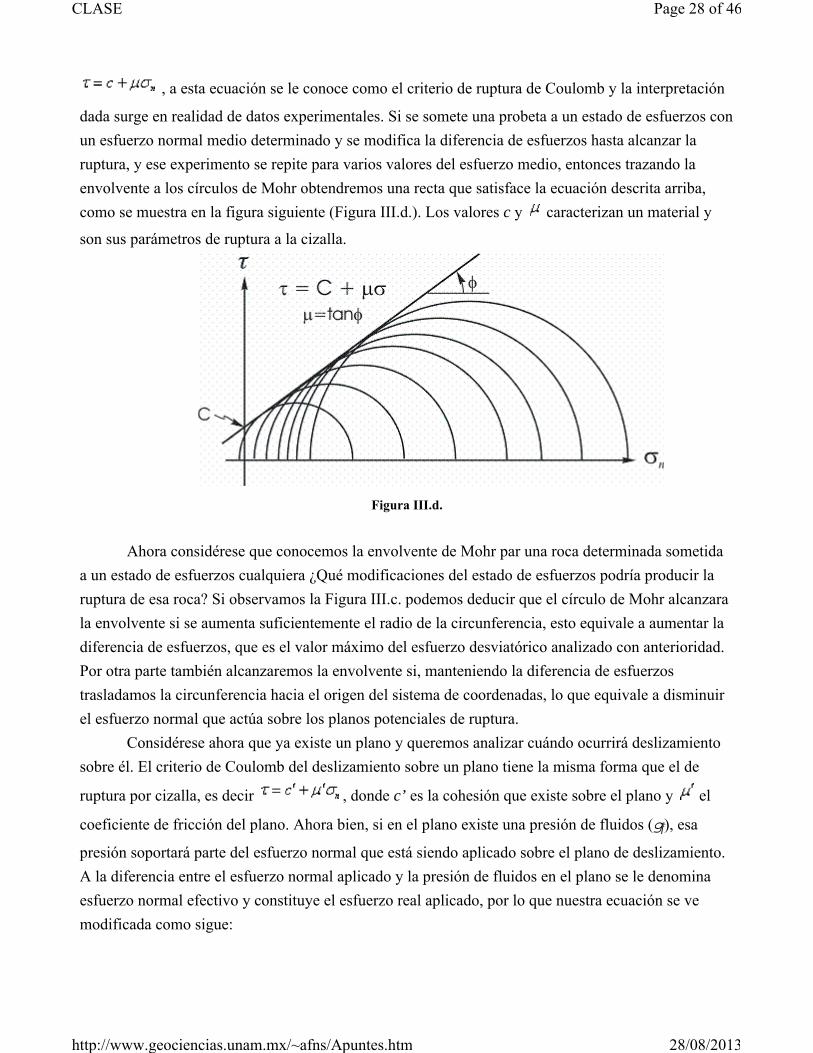
, a esta ecuación se le conoce como el criterio de ruptura de Coulomb y la interpretación
dada surge en realidad de datos experimentales. Si se somete una probeta a un estado de esfuerzos con
un esfuerzo normal medio determinado y se modifica la diferencia de esfuerzos hasta alcanzar la
ruptura, y ese experimento se repite para varios valores del esfuerzo medio, entonces trazando la
envolvente a los círculos de Mohr obtendremos una recta que satisface la ecuación descrita arriba,
como se muestra en la figura siguiente (Figura III.d.). Los valores c y caracterizan un material y
son sus parámetros de ruptura a la cizalla.
Figura III.d.
Ahora considérese que conocemos la envolvente de Mohr par una roca determinada sometida
a un estado de esfuerzos cualquiera ¿Qué modificaciones del estado de esfuerzos podría producir la
ruptura de esa roca? Si observamos la Figura III.c. podemos deducir que el círculo de Mohr alcanzara
la envolvente si se aumenta suficientemente el radio de la circunferencia, esto equivale a aumentar la
diferencia de esfuerzos, que es el valor máximo del esfuerzo desviatórico analizado con anterioridad.
Por otra parte también alcanzaremos la envolvente si, manteniendo la diferencia de esfuerzos
trasladamos la circunferencia hacia el origen del sistema de coordenadas, lo que equivale a disminuir
el esfuerzo normal que actúa sobre los planos potenciales de ruptura.
Considérese ahora que ya existe un plano y queremos analizar cuándo ocurrirá deslizamiento
sobre él. El criterio de Coulomb del deslizamiento sobre un plano tiene la misma forma que el de
ruptura por cizalla, es decir , donde c’ es la cohesión que existe sobre el plano y el
coeficiente de fricción del plano. Ahora bien, si en el plano existe una presión de fluidos (�f), esa
presión soportará parte del esfuerzo normal que está siendo aplicado sobre el plano de deslizamiento.
A la diferencia entre el esfuerzo normal aplicado y la presión de fluidos en el plano se le denomina
esfuerzo normal efectivo y constituye el esfuerzo real aplicado, por lo que nuestra ecuación se ve
modificada como sigue:
Page 28 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
. Obsérvese que un aumento en �f equivale a una disminución de �n .
Típicamente los valores de c’y son menores que los de c y , aunque no siempre tiene que ser así.
Por ejemplo en una fractura abierta c’ será cero y si hay material de falla como salbanda o brecha, su
cohesión será mucho menor que la de la roca sana; algo semejante ocurre con la fricción, aunque en
términos generales los coeficientes de fricción de dos paredes de roca sana tienen coeficientes de
fricción semejantes a el coeficiente de fricción interna de la roca intacta, si la falla está rellena con
materiales arcillosos, lo que es muy común, y especialmente en los casos de contener montmorillonita
o ilita, tendrán coeficientes de fricción bastante más bajos que el coeficiente de fricción interna de la
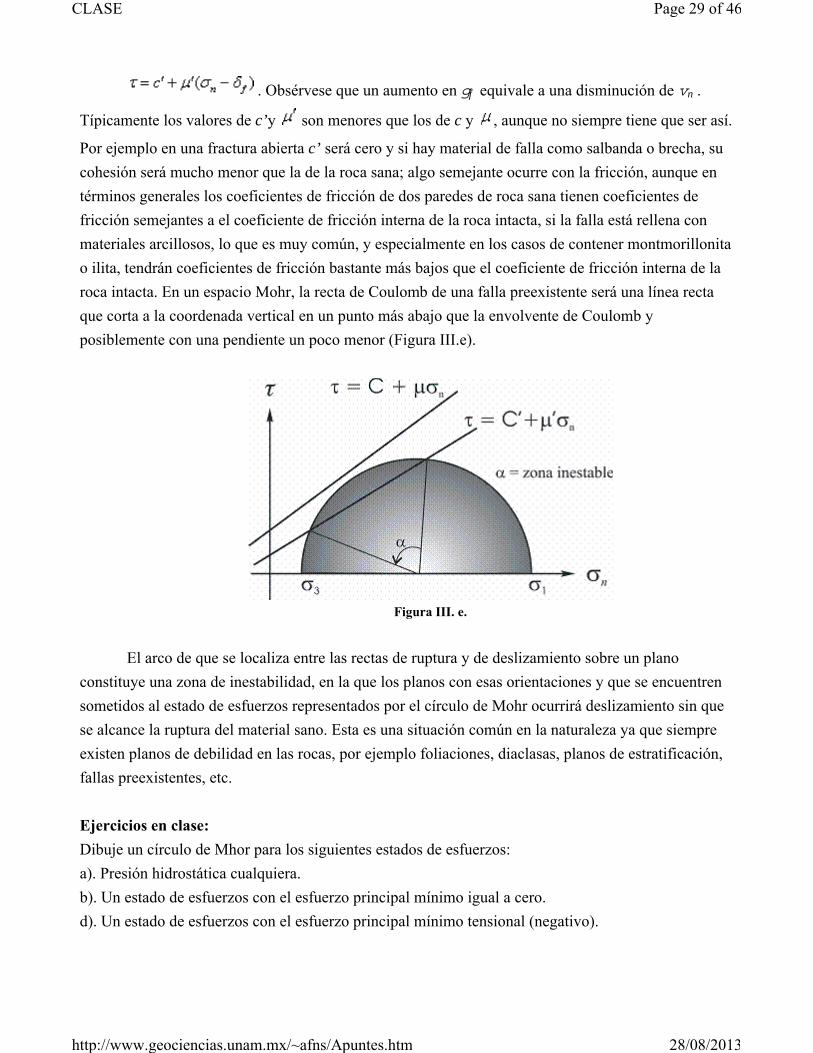
roca intacta. En un espacio Mohr, la recta de Coulomb de una falla preexistente será una línea recta
que corta a la coordenada vertical en un punto más abajo que la envolvente de Coulomb y
posiblemente con una pendiente un poco menor (Figura III.e).
Figura III. e.
El arco de que se localiza entre las rectas de ruptura y de deslizamiento sobre un plano
constituye una zona de inestabilidad, en la que los planos con esas orientaciones y que se encuentren
sometidos al estado de esfuerzos representados por el círculo de Mohr ocurrirá deslizamiento sin que
se alcance la ruptura del material sano. Esta es una situación común en la naturaleza ya que siempre
existen planos de debilidad en las rocas, por ejemplo foliaciones, diaclasas, planos de estratificación,
fallas preexistentes, etc.
Ejercicios en clase:
Dibuje un círculo de Mhor para los siguientes estados de esfuerzos:
a). Presión hidrostática cualquiera.
b). Un estado de esfuerzos con el esfuerzo principal mínimo igual a cero.
d). Un estado de esfuerzos con el esfuerzo principal mínimo tensional (negativo).
Page 29 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

e). Un estado de esfuerzos que no alcanza la envolvente. Explique que pasará en ese caso con la
probeta.
f). Un estado de esfuerzos que rebasa la envolvente. Explique que pasará con la probeta en ese caso.
g). ¿Cómo interpretaría una envolvente horizontal?
h). Entre mayor sea la pendiente de la envolvente ¿cómo será el ángulo de ruptura �?
i). Dibuje un esquema en espacio Mohr ilustrando un aumento en la presión de fluidos y otro
ilustrando una disminución en la presión de fluidos.
j). ¿Que pasa al círculo de Mohr de un estado de esfuerzos hidrostático si aumenta la presión de
fluidos?
Comportamiento de las rocas al ser sometidas a esfuerzoLas rocas son materiales que tienen dos cararacterísticas muy importantes para su
comportamiento a la deformación, se trata de materiales policristalinos con minerales de distintas
composiciones; y contiene planos de debilidad que van desde zonas con comportamiento reológico
distinto hasta fracturas abiertas. Las rocas presentasn dos comportamientos a la deformación en la
macroescala, frágil y dúctil. La diferencia es que en el primero ocurre fracturamiento del material es
decir el materil pierde la cohesión en algunas de sus partes y en el segundo se da el cambio de forma
sin que haya pérdida de cohesión del material. Los mecanismos de uno y otro tipos de deformación no
serán tratados aquí, solamente apuntaremos algunas de sus características principales.
Los factores que tienen mayor influencia (no los únicos) para determinar si la deformación
será frágil o dúctil son la presión, la temperatura, la velocidad de deformación y la presencia de
fluidos. La deformación dúctil ocurre de varias maneras, una es por deformación frágil (deslizamiento
sobre planos) en escalas menores a la de observación y de esa manera no hay pérdida de cohesión a la
escala observada, este tipo de deformación lo tenemos de manera dominante en el plegamiento de
cobertura; otra es por transferencia de material vía disolución-precipitación, que comúnmente se
asocia también a los fenómenos de plegamiento, y por deformación cristal-plástica, que es la
dominante en los procesos de deformación con metamorfismo asociado. La deformación frágil es un
fenómeno controlado fundamentalmente por la presión, o por la fricción según se quiera ver,
recuérdese que la fuerza friccional es proporcional a el esfuerzo normal; por otra parte los procesos
cristal-plásticos son fenómenos controlados por la temperatura (tipo Arrenius). En un esquema
simplificado pero ilustrativo como el que se muestra en la Figura III.f, se puede verificar que
especificadas las condiciones de temperatura y presencia de fluidos, cambios en la velocidad de
deformación puede producir deformación frágil o dúctil.
Page 30 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.f.
Si la velocidad de deformación v supera a la velocidad con que ocurre el proceso de disolución
y precipitación, se dará la fractura del material. Ambas velocidades pueden tener variaciones en el
tiempo, por lo que puede presentarse una superposición de ambos tipos de deformación. El caso de la
deformación cristal-plástica es análogo al de la Figura IIIf, siendo en ese caso la temperatura la que
permite una mayor velocidad de deformación por procesos cristal-plástico.
Los planos de deslizamiento en ensayos mecánicos.Cuando una roca es sometida a compresión, tienen lugar una serie de fenómenos que culminan
con la fractura del material. El resultado dependerá de las condiciones en las que se realiza el
experimento. En la Figura III.g se muestran los resultados típicos para distintos casos.
Figura III.g. Fracturas producidas en probetas bajo distintas condiciones. 1 en ausencia de presión confinante se
general fracturas por extensión (splitting), 2 en condiciones de confinamiento se producen fracturas de cizalla (tipo
Coulomb), 3 con una presión confinante alta se producen fracturas tipo Coulomb pero la probeta experimenta cierto grado
de deformación “dúctil”, 4 en una prueba de tensión se producen fracturas por extensión.
Si se inicia con una probeta sana, en respuesta a la deformación (o a los esfuerzos aplicados)
se inicia el crecimiento de pequeñas microfracturas a partir de los defectos existentes. Todas las
microfractruras crecen por medio de la propagación de fracturas de tensión en las puntas de los
defectos (Fracturas Tipo I) y durante el proceso ocurre el enlace de aquellas que se encuentran
cercanas. Sobre las fracturas mayores se resolverá un esfuerzo normal y uno de cizalla según estén
orientadas y habrá mayor propensión al deslizamiento en aquellas orientadas adecuadamente con
respecto al sistema de esfuerzos general (como ya se analizó con anterioridad); así las fracturas
Page 31 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

orientadas más favorablemente crecerán más rápido y el proceso culminará con la formación de
fracturas mayores con orientación Coulomb que rompen la probeta.
Bibliografía: Stearns, D. W., et al., Understanding faulting in the shallow crust: Contributions of selected experimental and theoretical studiesMarshak S. y Mitra, G., 1988 Basic Methods of Structural Geology, Perentice Hall, 446p. (Capítulo 10)Scholz, C., The mechanics of Earthquakes and faulting, Cambridge University Press, Atkinson, K., Fracture Mechanics of rocks, Academic Press Geology Series (capítulos 1 y 2).
Los dominios de la deformación geológica
Las zonas de cizalla se presentan en la corteza de dos modos extremos, a manera de fallas
frágiles y como zonas de deformación dúctil, en ambos casos forman cuerpos aproximadamente
tabulares. En la Figura III.h se muestra la distribución con la profundidad que se observa en las fallas,
éstas pasan de ser zonas de deformación quebradiza en la parte superior de la corteza, formando rocas
poco o no cohesivas como las brechas, salbandas y cataclasitas a una zona de deformación dúctil
donde se forman milonitas, entre estos dos dominios se presenta una zona de transición donde
coexisten ambos tipos de rocas. La zona de transición se localiza entre 12 y 15 km aproximadamente.
Figura III.h. Esquema que muestra los dominios de la deformación frágil y dúctil según la profundidad y temperatura en
la corteza, también se muestra el tipo de roca de falla que e forma y las facies metamórficas.
En la Figura III.i muestra la distribución de la resistencia máxima de las rocas corticales al
esfuerzo desviatórico, para las condiciones de temperatura y presión de fluidos indicadas en ella. Por
ejemplo, una roca puede resistir hasta 200 MPa a profundidades aproximadas de entre 4 y 17 km, a
menor profundidad se fracturará formando una falla frágil, y a mayor profundidad se deformará
dúctilmente formando una zona milonítica. Obsérvese que se localiza la zona de transición frágil-
dúctil entre los 12 y 15 km de profundidad aproximadamente.
Page 32 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.i. Gráfica que muestra la resistencia de la corteza. Obsérvese que se pueden deducir los dominos de las
deformaciones frágil y dúctil mostrados en la Figura III.h.
Bibliografía: Sibson, R. H., 1986, Earthquakes and rock deformation in crustal fault zones, Ann. Rev. Earth Planet Sci, 14, 149-175Nieto y Alaniz, Apuntes de Geología Estructural, Geometría de fallas a profundidad.Wise et al., 1984, Fault related rocks: Suggestions for terminology, Geology, v. 12, p. 391-394Schmid, S.M. and Handy, M.R., 1991. Towards a genetic classification of fault rocks: Geological usage and tectonophysical implications, Controversies in modern geology. Academic Press Limited, pp. 339-361.
La deformación frágil de los medios rocosos discontinuos
La activación de las fallas existentes Criterios de deslizamiento y orientación del deslizamiento sobre planos pre-existentes Cinemática de fallas en un medio rocoso fracturado
Bibliografía: Alaniz-Alvarez, S. A., y Nieto-Samaniego, A. F., 1997, Representación gráfica de los dominios de ruptura y
deslizamiento: aplicación a la Falla de Oaxaca, México: Univ. Nal. Autón. México, Inst. Geología, Revista Mexicana de Ciencias Geológicas, v. 14, p. 26-37.
Morris, A., Ferril, D. A., y Henderson, D. B., 1996, Slip-tendency analysis and fault reactivation, Geology, 24,p. 275-278.Hancock, P. L., Editor, 1994, Continental deformation, Pergamon Press, Oxford New York, Seoul, Tokyo, 421p. (Capítulo 14)Twiss, R.J., and Moores, E.M., 1992, Structural Geology. New York, W.H. Freeman and Co., 532 p. (capítulo 9)
- Inicio y propagación de fallas en un medio rocoso
Page 33 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Ahora pasaremos a analizar de manera específica como se desarrollan las fallas en la corteza
terrestre. En este apartado trataremos las fallas como objetos individuales y solamente veremos la
interacción que ocurre entre fallas que se encuentran cercanas. Posteriormente, en la última parte
estudiaremos las fallas y fracturas como conjuntos de estructuras. Es generalmente aceptado que las
fallas crecen de dos maneras, por propagación de una fractura a partir de sus colas y por enlace de dos
fracturas cercanas para formar una de mayor tamaño.
Iniciaremos por definir los tres modos básicos en que se propaga una fractura, los cuales se
ilustran en la Figura III.h.
Figura III.h. Esquema de los principales tipos de fractura. Modo I son fracturas de extensión donde el desplazamiento es
perpendicular a las paredes de la fractura. Modo II son aquellas en las que le la cizalla es paralela a la dirección de
propagación de la fractura. Modo III son aquellas en las que la cizalla es perpendicular a la dirección de propagación de la
fractura.
Es generalmente aceptado que las fracturas se inician a partir de un defecto (crack), este puede
ser muy pequeño, por ejemplo una pequeña fractura o el clivaje en un cristal, o cualquier otro defecto
que constituya una zona o plano de discontinuidad muy pequeño con relación a al objeto que se está
deformando, a estas zonas las denominaremos zonas de nucleación de fracturas. Hay dos maneras de
analizar las condiciones que hacen que la fractura se propague a partir de esos pequeños defectos. Los
basados en el balance de energía (elástica) en el sistema, basados en la teoría de Griffit y los que
analizan la distribución espacial del sistema de esfuerzos alrededor del defecto o fractura,
denominados de manera genérica “mecánica de la fractura”. En el caso de la teoría de Griffit se puede
determinar las condiciones en las cuales un crack se propaga, se mantiene estable o se cicatriza. En el
caso de la Mecánica de la Fractura Lineal Elástica, se define la geometría de la propagación, lo cual es
especialmente útil en la geología estructural.
En la Figura III.i se muestran las trayectorias que seguirán las colas de una microfractura en
dos circunstancias: En una pequeña fractura aislada, las colas crecerán siempre en modo I con una
tendencia a alinearse perpendiculares al esfuerzo mínimo compresivo (�3) en la notación que hemos
seguido, independientemente del modo en el que se encuentre la fractura pequeña; estas colas pueden
Page 34 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

crecer hasta una longitud finita, ya que al crecer el esfuerzo necesario para producir su propagación
aumenta haciendo imposible que su propagación continúe. Cuando dos fracturas se aproximan, las
colas tienden a seguir las trayectorias del esfuerzo, dichas trayectorias están perturbadas por las
fracturas mismas, por ello tienden a curvarse hasta interceptarse una con otra.
Figura III.i. El esquema de la izquierda muestra que un crack sujeto a cizalla dado el estado de esfuerzos general
se propagará por el crecimiento de sus colas siempre en el Modo I, las colas tienden a orientarse perpendiculares al
esfuerzo compresivo mínimo. En el esquema de la derecha se muestran las trayectorias de los esfuerzos en las
inmediaciones de la cola del crack 1, las líneas son perpendiculares al esfuerzo mínimo compresivo local. Al crecer el
crack 2, tiende a seguir las trayectorias del esfuerzo local adquiriendo una forma curva. En este esquema se simplificó el
caso suponiendo que el campo se esfuerzos sólo esta afectado por el crack 1, pero en realidad tanto el crack 1 como el 2
generarán una zona de perturbación en el campo de esfuerzos siendo el resultado que las dos colas se curven
simétricamente.
El estado de esfuerzos en la vecindad de las colas de dos fracturas cercanas se ilustra en la
Figura III.j. El caso ilustrado es de fallas laterales derechas, en el caso a con un salto izquierdo y el
caso b con un salto derecho. En el caso a se define un área entre las dos colas que está sometida a
compresión y el área con esfuerzo principal mínimo tensional es muy pequeña y restringida a una
zona muy cercana a las colas de las fracturas; dada la configuración de las trayectorias de los
esfuerzos principales se formarán fracturas de cizalla secundarias tal como se ilustra; nótese que las
fracturas de tensión tenderán a alejarse de la fractura vecina; una zona de relevo como ésta
evolucionará a un a zona compleja con numerosas fracturas de cizalla. En el caso b casi toda la zona
licalizada entre las colas de las fracturas tiene un esfuerzo principal mínimo tensional, lo que hace
fácil el desarrollo de fracturas en modo I que al seguir las trayectorias de los esfuerzos para orientarse
perpendicular al esfuerzo principal mínimo (véase figura III.i), tenderán a unir ambas fracturas.
Page 35 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.j.
El proceso de enlace de fracturas en escalas mayores se relaciona íntimamente con el
desarrollo de un sistema de fracturas secundario que se genera en las zonas de cizalla (zonas de cizalla
simple), conocido en general como sistemas Riedel. Aunque debe aclararse que el término fracturas
Riedel se refiere a un grupo específico de fracturas con una orientación determinada dentro de la zona
de cizalla (Figura III.k). Los conjuntos de fracturas Riedel tienen la característica de formarse en casi
todas las zonas de cizalla, tanto en experimentos analógicos con arcillas y arenas como en fallas de
gran desplazamiento o incluso en los fracturamientos asociados a grande eventos sísmicos. La Figura
III.k muestra un sistema Riedel, la elipse de deformación finita producida y las direcciones principales
de los esfuerzos asociados.
La experiencia nos muestra que en los medios rocosos naturales existen numerosas fracturas
de muy diversos tamaños y comúnmente también con orientaciones diversas, por ello en general
cuando una fractura se está propagando se aproxima a otras fracturas y tendrá lugar un enlace.
Cuando se propaga una fractura pequeña esta fractura se aproximara a otras fracturas y al unirse
formarán fracturas mayores que podrán constituirse en zonas de nucleación de fracturas en para una
escala mayor, y el proceso de crecimiento de colas en Modo I se puede repetir en la nueva escala
formando así estructuras cada vez mayores. Más adelante discutiremos cómo este proceso puede ser
el responsable del escalamiento de las fracturas.
Page 36 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.k. Esquema mostrando las relaciones geométricas de las estructuras formadas en un sistema de cizalla
izquierdo. R = Fracturas Riedel, son fracturas de cizalla sintéticas con el sistema de cizalla general, R’ = Fracturas
conjugadas Riedel con cizalla antitética, en este caso cizalla derecha, T = Fracturas de tensión (abiertas), son paralelas al
esfuerzo principal máximo compresivo, X Fracturas de cizalla derecha, P = Fracturas de cizalla sintéticas con la cizalla
general.
Las zonas de cizalla evolucionan al aumentar la deformación finita, desarrollando las fracturas
mostradas en la Figura III.k, esas fracturas se deforman y rotan progresivamente conforme avanza la
deformación produciendo el enlace de segmentos de falla y estructuras en rombos y estructuras
trenzadas que comúnmente son observadas tanto en la naturaleza como en modelos analógicos. La
generación de fracturas Riedel, estructuras rómbicas, lentes sigmoidales y estructuras trenzadas
representan fases paulatinamente más avanzadas de la deformación. Recuérdese que la característica
principal de la cizalla simple es que las líneas materiales rotan conforme la deformación avanza,
pudiendo pasar de un dominio de acortamiento a uno de alargamiento. En la Figura III.l se muestra un
ejemplo de enlace de fallas en un modelo de arcilla por medio del crecimiento de fracturas R y P.
Page 37 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
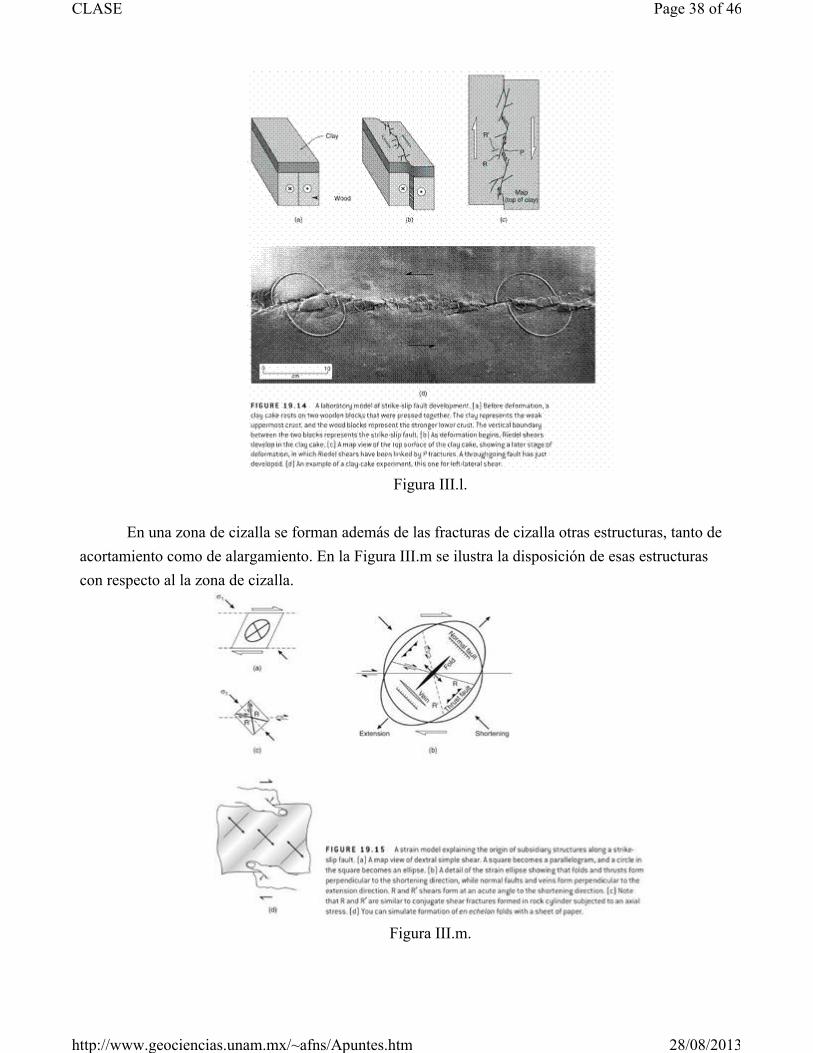
Figura III.l.
En una zona de cizalla se forman además de las fracturas de cizalla otras estructuras, tanto de
acortamiento como de alargamiento. En la Figura III.m se ilustra la disposición de esas estructuras
con respecto al la zona de cizalla.
Figura III.m.
Page 38 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
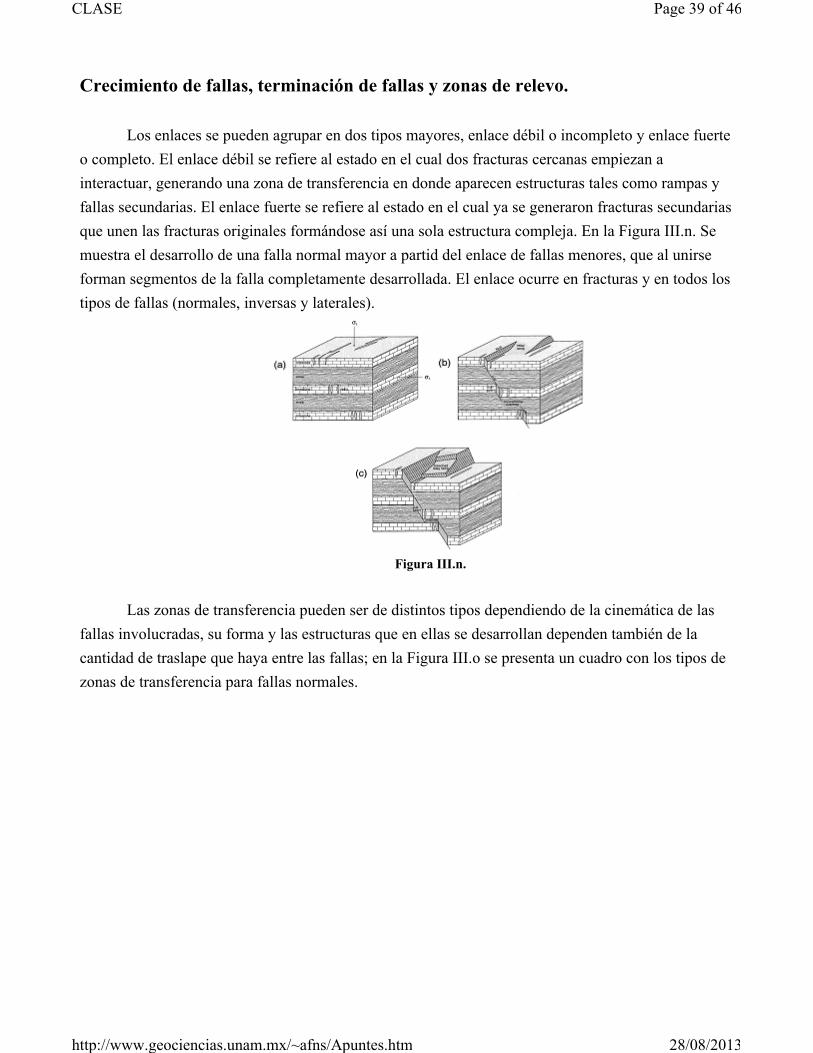
Crecimiento de fallas, terminación de fallas y zonas de relevo.
Los enlaces se pueden agrupar en dos tipos mayores, enlace débil o incompleto y enlace fuerte
o completo. El enlace débil se refiere al estado en el cual dos fracturas cercanas empiezan a
interactuar, generando una zona de transferencia en donde aparecen estructuras tales como rampas y
fallas secundarias. El enlace fuerte se refiere al estado en el cual ya se generaron fracturas secundarias
que unen las fracturas originales formándose así una sola estructura compleja. En la Figura III.n. Se
muestra el desarrollo de una falla normal mayor a partid del enlace de fallas menores, que al unirse
forman segmentos de la falla completamente desarrollada. El enlace ocurre en fracturas y en todos los
tipos de fallas (normales, inversas y laterales).
Figura III.n.
Las zonas de transferencia pueden ser de distintos tipos dependiendo de la cinemática de las
fallas involucradas, su forma y las estructuras que en ellas se desarrollan dependen también de la
cantidad de traslape que haya entre las fallas; en la Figura III.o se presenta un cuadro con los tipos de
zonas de transferencia para fallas normales.
Page 39 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Figura III.o.
Cada tipo de transferencia dependerá de la cinemática de las fallas y de cómo se aproximan
unas a otras durante el proceso de crecimiento. A manera de conclusión podemos decir que las
fractruras y fallas crecen principalmente por dos mecanismos fundamentales: (a) por propagación, en
este caso el registro queda a manera de múltiples fracturas abandonadas que se localizan en los
alrededores de la estructura mayor y (b) por enlace, en este caso la estructura desarrollada adquirirá
una forma en zig-zag o anastomosada para estadios avanzados de deformación (Figura III.p).
Figura III.p. Esquema que muestra el crecimiento de una falla por propagación (A) y por enlace con otra estructura (B).
Tomado de Alessio y Martel “Fault terminations and barriers to fault growth” Journal of Structural Geology 26, p. 1885-
1896.
Page 40 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Bibliografía: Peacock, D. C. P., 2002, Propagation, interaction and linkage in normal fault systems, Earth Sciencie Reviews, 58, p. 121-142 Hancock, P. L., Editor, 1994, Continental dDeformation, Pergamon Press, Oxford New York, Seoul, Tokyo, 421p. (Capítulo 6)……………Estructuras regionales y conjuntos estructurales
La tectónica en compresiónLa inversión tectónicaBibliografía: Hancock, P. L., Editor, 1994, Continental Deformation, Pergamon Press, Oxford New York Seoul Tokio, 421p. Eguiluz de Antuñano et al., 2000, Tectónica de la Sierra madre Occidental, Boletín de la Sociedad Geológica Mexicana, v.
LIII, p. 1-26.
Napas de coberturas sedimentarias y de despegue (decollement). Napas de basamento por deformación dúctil. Deformación dúctil en extensión. Los complejos de núcleo metamórfico (Metamorphic core complex)Bibliografía: Auboin, J., 1980, Tratado de geología, tomo III Tectónica Tectonofísica y Morfología, Ediciones Omega.339 p.Le Pichon, X., y Chamot-Rooke, N. Extension of continental crust, Controversies in modern geology. Academic Press
Limited, pp. 313-339.Martínez-Reyes, J., y Nieto-Samaniego, A. F., 1990, Efectos geológicos de la tectónica reciente en la parte central de
México: Universidad Nacional Autónoma de México, Instituto de Geología, Revista, v. 9, p. 33–50.Nieto-Samaniego, A. F., Ferrari, L., Alaniz-Alvarez, S. A., Labarthe-Hernández, G., y Rosas-Elguera, J., 1999, Variation
of Cenozoic extension and volcanism across the southern Sierra Madre Occidental Volcanic Province, México, Geological Society of America Bulletin, v. 111, p. 347-363.
Suter, M., López-Martínez, M., Quintero-Legorreta, O., Carrillo-Martínez, M., 2001, Quaternary intra-arc extension in the central Trans-Mexican volcanic belt, Geological Society of America Bulletin, v. 113, p. 693-703.
Escalamiento de fracturas y fallas
IV. Geometría Fractal
Los objetos geológicos tienen distintos tamaños, los hay desde la escala microscópica hasta la
escala planetaria. Es evidente que se nos facilita estudiar aquellos cuyos tamaños son cercanos al
nuestro, desde tamaños que podemos observar con una lupa de aumento hasta aquellos que podemos
recorrerlos caminando. Para estudiar objetos más pequeños requerimos de tomar muestras y
trasladarlas a laboratorios donde podamos observarlas o analizar su constitución química o física
utilizando diversos aparatos; para estudiar los más grandes requerimos el uso de algunas tecnologías
como fotografías aéreas o imágenes de satélite, por ejemplo.
Este concepto de escala o de “distintas magnitudes” de los objetos podemos trasladarlo más
allá de lo referente a sus dimensiones “físicas”, es decir a la medida de las magnitudes de sus
fronteras. La observación de los objetos nos muestra que hay objetos más complejos que otros, por
ejemplo un cubo de hierro fundido es menos complejo que un árbol. Bajo esta consideración podemos
suponer que la complejidad de los objetos puede variar mucho y podríamos también hablar de escalas
Page 41 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm
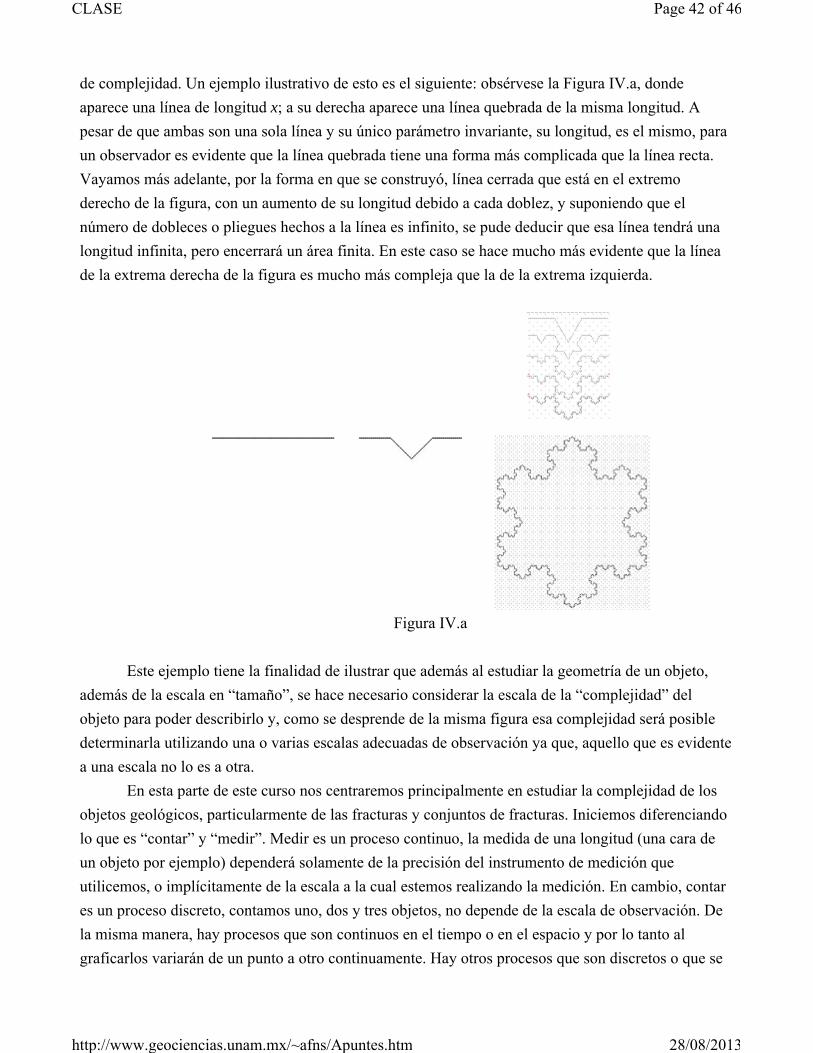
de complejidad. Un ejemplo ilustrativo de esto es el siguiente: obsérvese la Figura IV.a, donde
aparece una línea de longitud x; a su derecha aparece una línea quebrada de la misma longitud. A
pesar de que ambas son una sola línea y su único parámetro invariante, su longitud, es el mismo, para
un observador es evidente que la línea quebrada tiene una forma más complicada que la línea recta.
Vayamos más adelante, por la forma en que se construyó, línea cerrada que está en el extremo
derecho de la figura, con un aumento de su longitud debido a cada doblez, y suponiendo que el
número de dobleces o pliegues hechos a la línea es infinito, se pude deducir que esa línea tendrá una
longitud infinita, pero encerrará un área finita. En este caso se hace mucho más evidente que la línea
de la extrema derecha de la figura es mucho más compleja que la de la extrema izquierda.
Figura IV.a
Este ejemplo tiene la finalidad de ilustrar que además al estudiar la geometría de un objeto,
además de la escala en “tamaño”, se hace necesario considerar la escala de la “complejidad” del
objeto para poder describirlo y, como se desprende de la misma figura esa complejidad será posible
determinarla utilizando una o varias escalas adecuadas de observación ya que, aquello que es evidente
a una escala no lo es a otra.
En esta parte de este curso nos centraremos principalmente en estudiar la complejidad de los
objetos geológicos, particularmente de las fracturas y conjuntos de fracturas. Iniciemos diferenciando
lo que es “contar” y “medir”. Medir es un proceso continuo, la medida de una longitud (una cara de
un objeto por ejemplo) dependerá solamente de la precisión del instrumento de medición que
utilicemos, o implícitamente de la escala a la cual estemos realizando la medición. En cambio, contar
es un proceso discreto, contamos uno, dos y tres objetos, no depende de la escala de observación. De
la misma manera, hay procesos que son continuos en el tiempo o en el espacio y por lo tanto al
graficarlos variarán de un punto a otro continuamente. Hay otros procesos que son discretos o que se
Page 42 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

comportan en “saltos” discretos es decir pasan de un estado a otro. Estudiaremos este tipo de procesos
ya que ellos son lo que se encuentran en el corazón mismo del Caos.
Iteración y autoreferenciaLa autoreferencia es la condición en la cual un enunciado hace referencia a sí mismo. Esta
característica tiene una enorme trascendencia en el resultado de un proceso, como se explicará más
adelante.
Una iteración es, en términos simples y claros, es una función de sí misma. La diferencia
entre autoreferencia e iteración es que la primera es la condición de referirse a sí mismo (exist o no
existe), mientras que la iteración es una repetición que puede producirse un número determinado de
veces.
Tomemos como ejemplo la función , entonces podemos definir una función de
esta misma función , de donde se hace evidente que requerimos primero
definir , es decir especificar un valor para , digamos por ejemplo para ,
entonces obtenemos . Decimos que esta es la segunda iteración de la función
par un valor inicial de . De este ejemplo podemos ver que los valores de
para cada iteración no variarán continuamente, sino en saltos teniendo un valor definido para cada
iteración que dependerá del valor inicial de x.
Veamos ahora que los valores de las iteraciones de ciertas funciones variarán enormemente
dependiendo de el valor inicial de x. Considérese la función . En la siguiente tabla
siguiente se muestran los valores que toma la función para distintos valores iniciales de x.
Valor inicial de x Órbita de xValores de la función para las iteraciones 1,2,3,… comenzando con el valor inicial de x
2 2, 4.25, 18.31, 335.59, 112626.03,…
0.5 0.5, 0.5, 0.5, 0.5, 0.5, 0.5, 0.5,…
0.4 0.4, 0.41, 0.4181, 0.4248, 0.4304,…
0.6 0.6, 0.61. 0.6221, 0.6370, 0.6557,…
0 0, 0.25, 0.3125, 0.3476, 0.3708,…
Vemos en la tabla que las órbitas son muy diferentes dependiendo del valor inicial; para 2, los
valores de la órbita aumentan indefinidamente, para 0.5 todas las iteraciones tendrán el mismo valor
0.5, para 0.6 el valor de las iteraciones aumenta pero a una taza mucho más pequeña que para 2, y
para 0.4 y 0 los valores de las iteraciones aumentarán pero teniendo como límite 0.5.
Pasemos ahora a decir que los procesos caóticos son procesos no lineales que pueden ser
simulados por medio de iteraciones matemáticas, además ahora sabemos que muchos procesos
naturales y específicamente procesos geológicos se comportan de manera caótica. Si esto es verdad,
Page 43 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

del sencillo ejemplo mencionado arriba deducimos que no solo es necesario conocer la función, sino
además conocer el valor exacto inicial de la variable (o las variables) involucradas para poder predecir
el resultado de la iteración n, a eseos valores inicial le denominamos “condiciones iniciales” y resulta
intuitivamente obvio que en un proceso natural es imposible conocer los valores iniciales de todas las
variables involucradas. Ya vimos que un cambio muy pequeño en las condiciones iniciales puede
producir resultados dramáticamente distintos. Esta es la esencia del Caos.
Espacio de Fase
El Espacio de Fases un espacio hipotético que posee tantas dimensiones como el número de
variables que intervienen en un sistema dinámico determinado. Cada variable estaría representada por
un eje coordenado y un punto en el espacio de fase representaría el conjunto de valores simultáneos
de todas las variables. Si graficamos los valores simultáneos que adquieren las variables para
diferentes momentos los puntos en el espacio de fase dibujarán una trayectoria que se denomina
órbita. Cuando en un sistema de fase una órbita tiende a un punto o conjunto de puntos, se dice que
ese conjunto de puntos es un atractor. Por ejemplo al graficar la órbita en el espacio de fase velocidad-
posición de un péndulo este siempre terminará en un punto que representa el estado de reposo (cuando
el péndulo está quieto, localizado en la vertical y con velocidad cero). Ese punto es el atractor para un
péndulo. Pueden existir muchos otros atractores, por ejemplo una circunferencia, pero los sistemas
caóticos tienen atractores diferentes, llamados atractores extraños, y cuya característica es que su
dimensión es fractal. Pasemos entonces a definir que es la dimensión de un objeto.
Dimensiones topológicas y dimensión fractal
No es tan sencillo definir la dimensión de un objeto, para fines prácticos de este curso
consideraremos simplemente que la dimensión topológica es aquella que obtenemos de definir en un
cuerpo la parte más pequeña y simple que nos permite dividirlo, y a la dimensión euclidiana de ese
cuerpo le sumamos 1. Por ejemplo una línea puede ser dividida por un punto, entonces su dimensión
es 1 ya que un punto tiene dimensión 0 y al sumarle 1 obtenemos 1; pero una superficie no puede ser
dividida por un punto, requerimos una línea para dividirla, por lo cual su dimensión topológica será
1+1=2; y para un cuerpo que tiene volumen requeriremos un plano para poder dividirlo, así su
dimensión topológica será 3. Las dimensiones obtenidas de esta manera son intuitivas si consideramos
la libertad de movimiento que nos permite cada objeto, por ejemplo en una línea sólo podemos
movernos en una dirección (en dos sentidos, claro está) y entonces tendremos que la línea tiene
dimensión 1, en el plano podemos movernos en dos sentidos (dimensión 2) y en un cuerpo en tres
sentidos (dimensión 3), véase lectura complementaria 3.
Page 44 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

Para poder obtener una medida de la dimensión de un objeto acudimos a la denominada
Dimensión Hausdorff-Besicovich. Para ello partimos de que un objeto puede ser “llenado” por un
número determinado de objetos de forma semejante N(r) con un factor de semejanza que
denominaremos r entonces la dimensión topológica será igual al valor D de acuerdo con ,
por lo que . Veamos ahora que pasa con la dimensión de un cuadrado por ejemplo, lo
podemos dividir en cuatro sub-cuadrados que lo llenan completamente, entonces r = 1/2 y N = 4, la
razón de semejanza r es un medio ya que para obtener el sub-cuadrado lo que hicimos fue sacar mitad
a las magnitudes de los lados del cuadrado mayor. Entonces de acuerdo con nuestra ecuación tenemos
que , lo cual coincide con nuestra dimensión topológica de un cuadrado.
Si aplicamos este procedimiento a otros objetos, encontraremos que para algunos de ellos el
valor de D no es entero sino fraccionario, a esos objetos los denominamos Fractales. Los fractales
tienen una dimensión fraccionaria cuyo valor está entre el valor de la dimensión topológica de los
objetos que lo constituyen (los que pueden dividirlo) la dimensión inmediatamente superior. Por
ejemplo un fractal que está compuesto por líneas, que sería el caso de un mapa con trazas de fallas,
tendrá una dimensión entre 1 y 2. Una explicación más extensa se puede consultar en la lectura
complementaria 03 (Anexo)
En la lectura complementaria 04 (Anexo) aparecen algunos fractales clásicos, sus
características y sus dimensiones. Todos estos fractales son Determinísticos.
Es momento de introducir una definición de Fractal, podemos decir que es un objeto
compuesto por partes que son semejantes al objeto en su conjunto. Existen varios tipos de fractales,
aquellos en los que las partes que los componen son idénticas (o estadísticamente semejantes para los
fractales no determinísticos) al objeto mayor, dada esa característica siempre observaremos el mismo
objeto independientemente de la escala de observación. Este caso es muy conocido por los geólogos
ya que en un afloramiento requerimos de una escala para conocer el tamaño de las estructuras
geológicas, pues son semejantes indistintas escalas; a estos fractales se los denomina Autosimilares.
Cuando la semejanza de las partes con el todo se da conjuntamente con una deformación, es decir al
cambiar de escala se observa el mismo objeto pero deformado, decimos que se trata de un fractal
Autoafín. Por último, hay fractales que cumplen con la semeanza al cambiar de escala pero que están
compuestos por otros objetos fractales, a estos los denominamos Multifractales.
Aplicación a las Fracturas y Fallas
La aplicación de la geometría fractal al estudio de las fracturas ha tenido un gran auge en los últimos
años y la literatura al respecto es ya muy numerosa. Los estudios se enfocan a determinar
Page 45 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm

características tales como distribución de longitudes, distribución de desplazamientos, clustering
(agrupamiento), y a partir de los parámetros fractales de las poblaciones de fracturas determinar
porosidades y conectividad. En este caso abordaremos, a manera de ejemplo de aplicación de la
geometría fractal al estudio de las fracturas, el problema de determinar la “cantidad” total de fractura
que puede contener una falla mayor.
Nota:
Ejercicios para generar conjuntos de fracturas con distintos parámetros usando el programa
FautGrowth y determinar su dimensión de caja utilizando el programa FractalAnálisis. Se hará un
ejercicio utilizando una imagen de un cuerpo fracturado para determinar su dimensión de
fragmentación, densidad de fractura y se determinará su grado de fracturamiento relativo.
Bibliografía: Marrett R., Allmendinger, R. W., 1992, Amount of extension on small faults: An example from the Viking graben,
Geology, v. 20, p. 47-50Marrett R., Allmendinger, R. W., 1990, Kinematic analysis of fault slip data Journal of Structural geology, v. 12, No. 8, p.
973-986Scholz, C. H., Cowie, P. A., 1990, Determination of total strain from faulting using slip measurements, nature, v. 346, p.
837-839.La Pointe, P. R., Hudson, J. A., 1985, Characterization and interpretation of rock mass joint patterns, Special Paper 199,
Geological Society of America.25p.Nieto-Samaniego, A. F., Alaniz-Alvarez, S. A.,Tolson, G., Oleschko, K., Korvin, G., Xu, S.-S., y Pérez-Venzor, J. A., en
prensa (en página web de A. Nieto), Spatial distribution, scaling and self-similar behavior of fracture arrays: Pure and Applied Geophysics.,
Nieto-Samaniego, A. F., Alaniz-Alvarez, S. A.,Tolson, G., Xu, S.-S., y Pérez-Venzor, J. A., 2003, Estimación de densidades, distribuciones de longitud y longitud total de fracturas; un caso de estudio en la Falla de Los Planes, La Paz, B. C. S.: Boletín de la Sociedad Geológica Mexicana Tomo LVI, p. 1-9.
Page 46 of 46CLASE
28/08/2013http://www.geociencias.unam.mx/~afns/Apuntes.htm