
APLICACIONES DE LAS LEYES DE NEWTON · • Un método general de resolución de problemas...
34
APLICACIONES DE LAS LEYES DE NEWTON
Transcript of APLICACIONES DE LAS LEYES DE NEWTON · • Un método general de resolución de problemas...

APLICACIONES DE LAS
LEYES DE NEWTON
• Peso
• Fuerzas normales
– Cuerpos apoyados sobre una superficie horizontal
– Cuerpos apoyados sobre una superficie inclinada
• Fuerza de rozamiento
– Cuerpos en movimiento
– Cuerpos en reposo
• Tensión en cuerdas
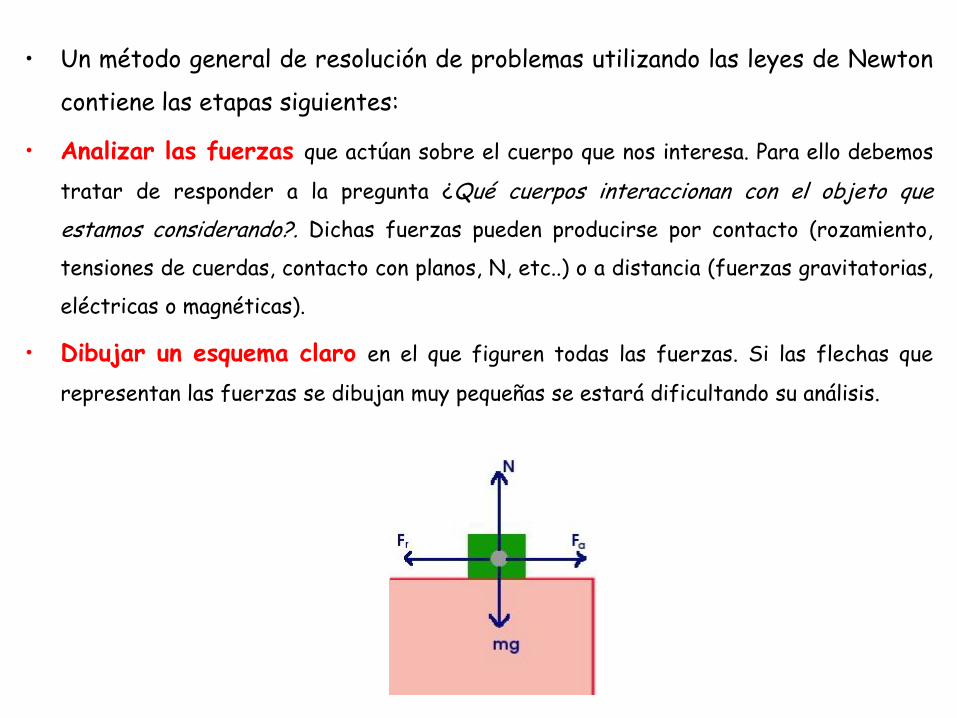
• Un método general de resolución de problemas utilizando las leyes de Newton
contiene las etapas siguientes:
• Analizar las fuerzas que actúan sobre el cuerpo que nos interesa. Para ello debemos
tratar de responder a la pregunta ¿Qué cuerpos interaccionan con el objeto que
estamos considerando?. Dichas fuerzas pueden producirse por contacto (rozamiento,
tensiones de cuerdas, contacto con planos, N, etc..) o a distancia (fuerzas gravitatorias,
eléctricas o magnéticas).
• Dibujar un esquema claro en el que figuren todas las fuerzas. Si las flechas que
representan las fuerzas se dibujan muy pequeñas se estará dificultando su análisis.
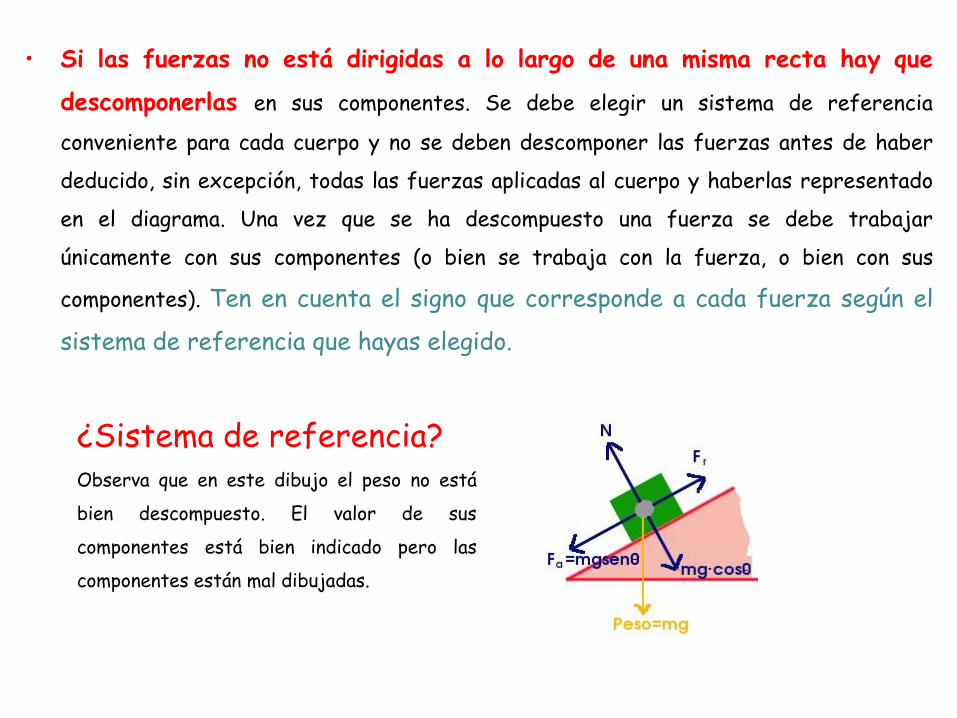
• Si las fuerzas no está dirigidas a lo largo de una misma recta hay que
descomponerlas en sus componentes. Se debe elegir un sistema de referencia
conveniente para cada cuerpo y no se deben descomponer las fuerzas antes de haber
deducido, sin excepción, todas las fuerzas aplicadas al cuerpo y haberlas representado
en el diagrama. Una vez que se ha descompuesto una fuerza se debe trabajar
únicamente con sus componentes (o bien se trabaja con la fuerza, o bien con sus
componentes). Ten en cuenta el signo que corresponde a cada fuerza según el
sistema de referencia que hayas elegido.
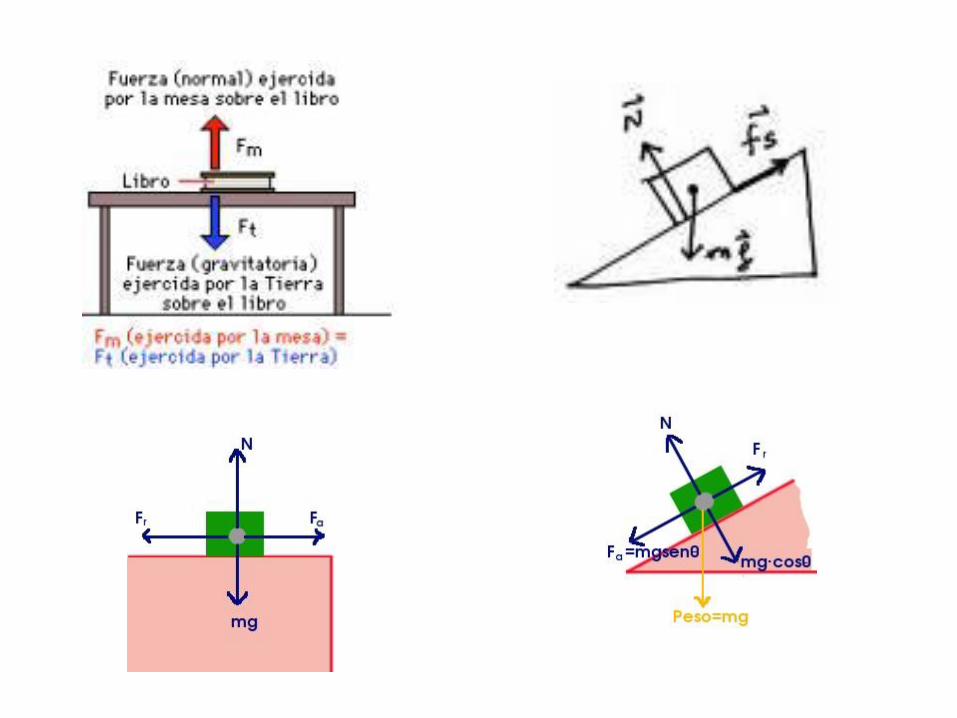
¿Sistema de referencia?Observa que en este dibujo el peso no está
bien descompuesto. El valor de sus
componentes está bien indicado pero las
componentes están mal dibujadas.
• Aunque las fuerzas se pueden descomponer en dos direcciones cualesquiera
perpendiculares entre sí, la forma más sencilla, que evitará posteriores complicaciones,
consiste en descomponer las fuerzas en las direcciones paralela y perpendicular a la
dirección de la aceleración.(Nosotros sólo trabajamos con problemas que transcurren
en un plano por eso sólo tenemos dos componentes)
• Una vez que hayamos terminado la descomposición de las fuerzas podemos aplicar las
leyes de Newton a cada una de las direcciones teniendo en cuenta la información
adicional disponible en el enunciado del problema. Cuando se trate de un sistema
formado por varios cuerpos podemos aplicar la 2ª ley al sistema en su conjunto o a
uno solo de los cuerpos.
• A lo largo de todo el ejercicio se debe explicar lo que se está haciendo, escribir las
ecuaciones generales de las leyes antes de sustituir valores, analizar el resultado y
prestar atención a las unidades. Se debe comprobar que los resultados son razonables
y examinar atentamente las soluciones obtenidas cuando se asignen valores extremos a
las variables.
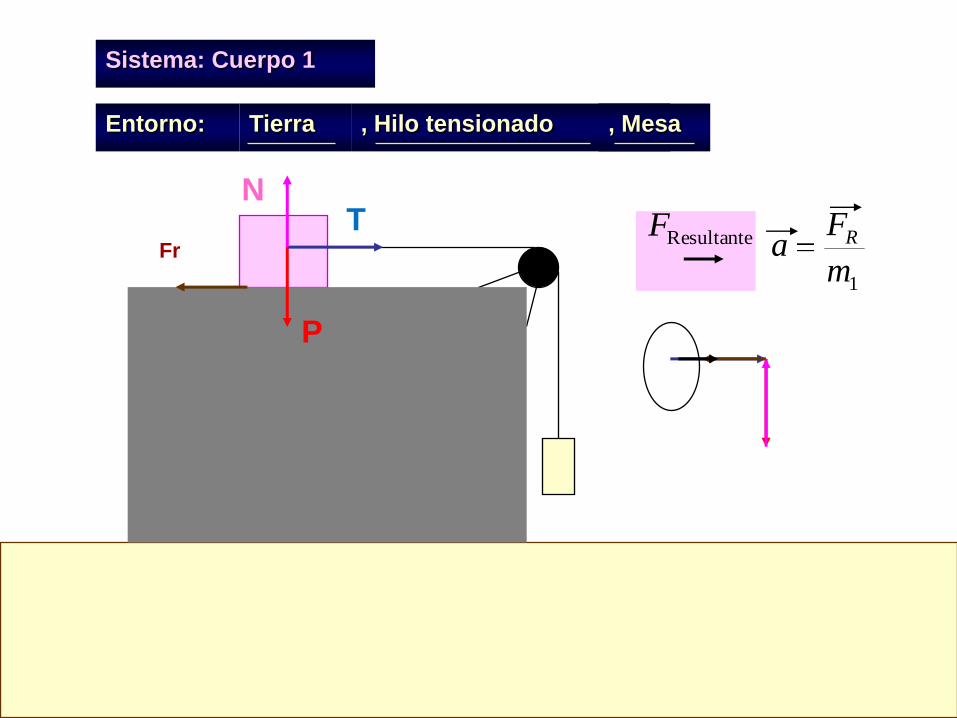
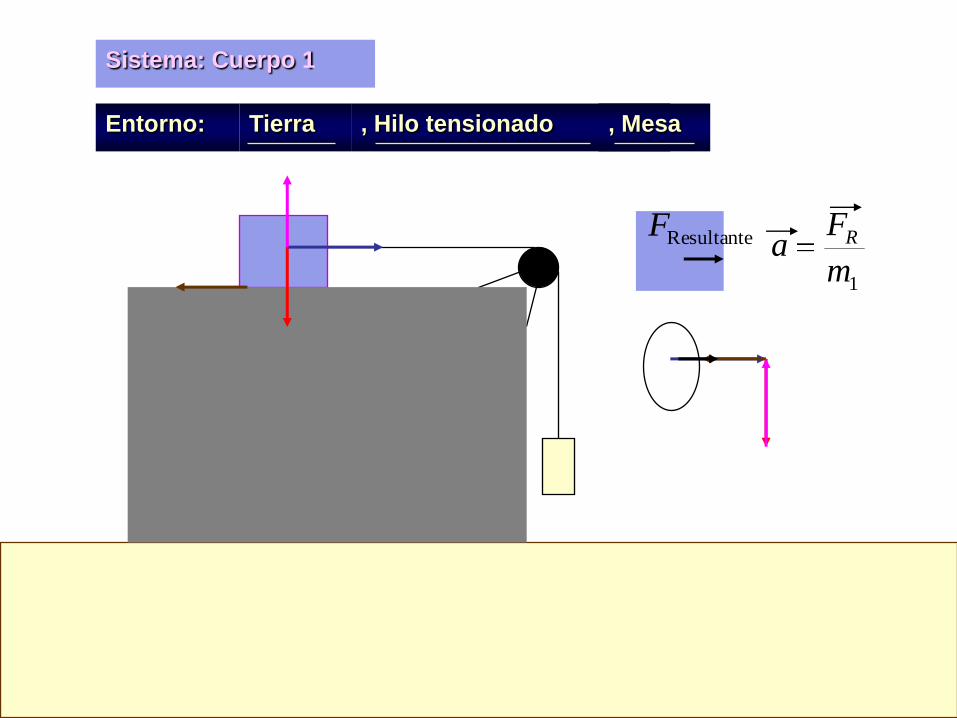
Sistema: Cuerpo 1
Entorno: Tierra , Hilo tensionado , Mesa
1m
Fa RResultanteF
P
Fr
TN
• Dibuja todas las fuerzas que actúan sobre el sistema
que estás estudiando.
• Elige un sistema de referencia adecuado.
• Descompón las fuerzas según las direcciones de ese
sistema de referencia.
• Aplica la 2ª ley de Newton a cada uno de los ejes.
• Si aparecen varios cuerpos enlazados la ley se puede
aplicar a cada uno de los cuerpos por separado o al
sistema en su conjunto según convenga.
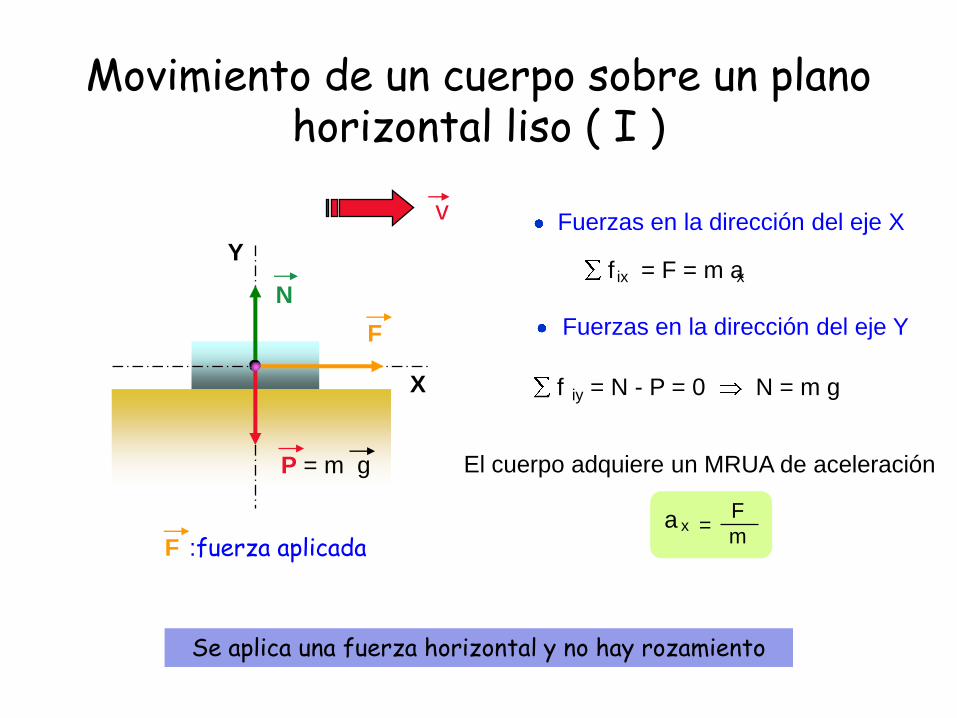
Movimiento de un cuerpo sobre un plano horizontal liso ( I )
Y
X f = N - P = 0 N = m giy
F
N
P = m g
ix xf = F = m a
El cuerpo adquiere un MRUA de aceleración
=F
mxa
F :fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
v
Se aplica una fuerza horizontal y no hay rozamiento
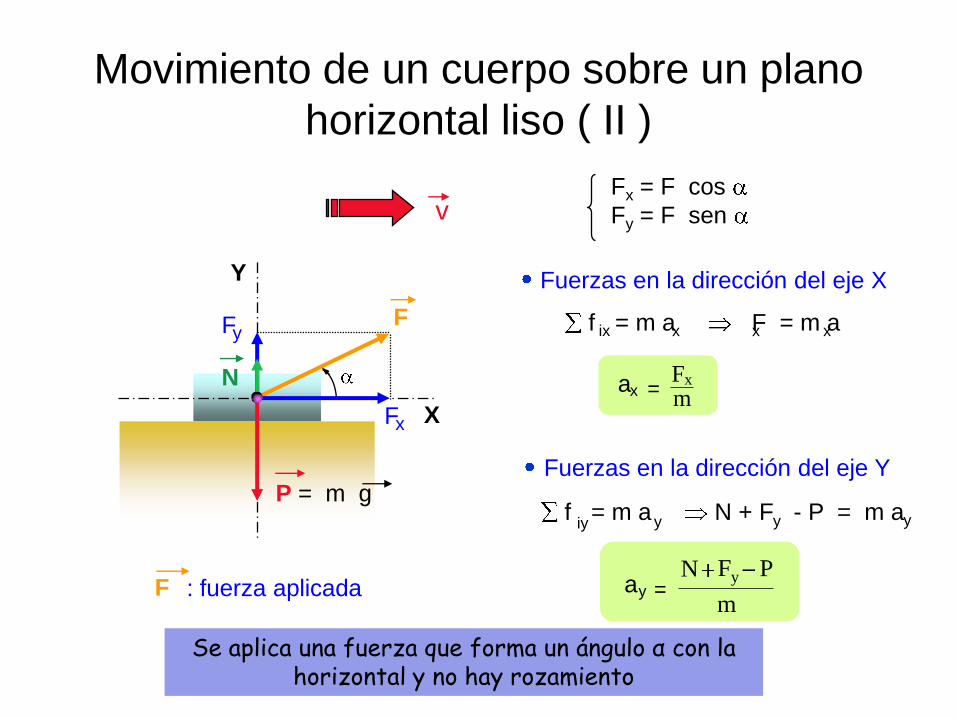
Movimiento de un cuerpo sobre un plano
horizontal liso ( II )
Y
X
F
N
P = m g
Fx
Fy
Fx = F cos
Fy = F sen v
ax = mFx
ay =m
PFN y
f = m a F = m aix xx x
f = m a N + F - P = m aiy yy y
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Se aplica una fuerza que forma un ángulo α con la horizontal y no hay rozamiento
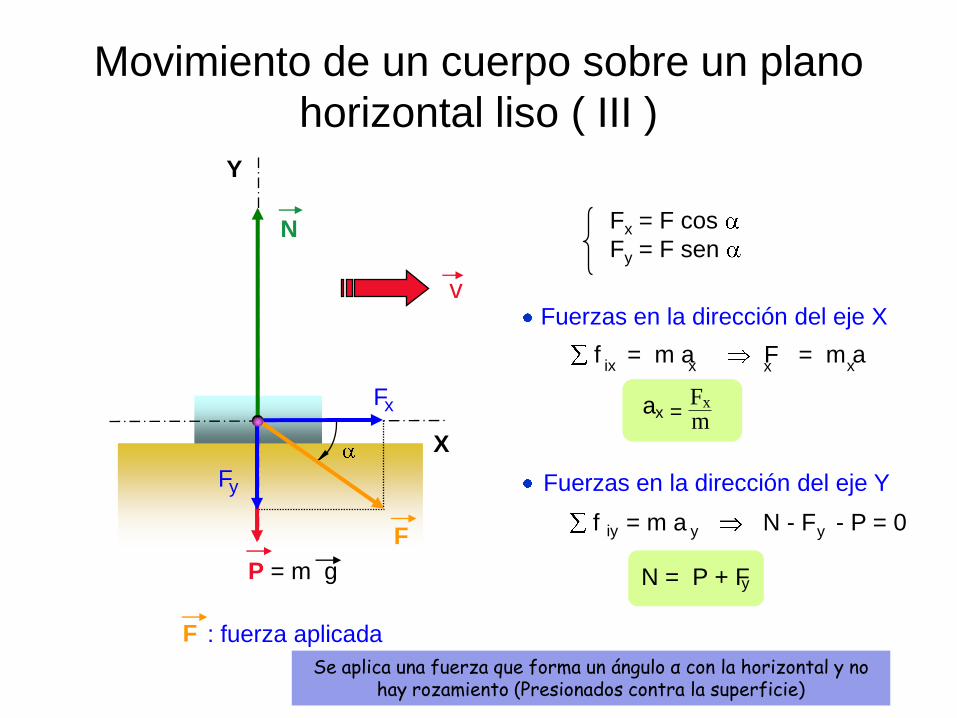
Movimiento de un cuerpo sobre un plano
horizontal liso ( III )
v
Y
X
F
N
P = m g
Fx
Fy
Fx = F cos
Fy = F sen
f = m a N - F - P = 0iy yy
f = m a F = m aix xx x
N = P + Fy
= mFxax
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Se aplica una fuerza que forma un ángulo α con la horizontal y no hay rozamiento (Presionados contra la superficie)
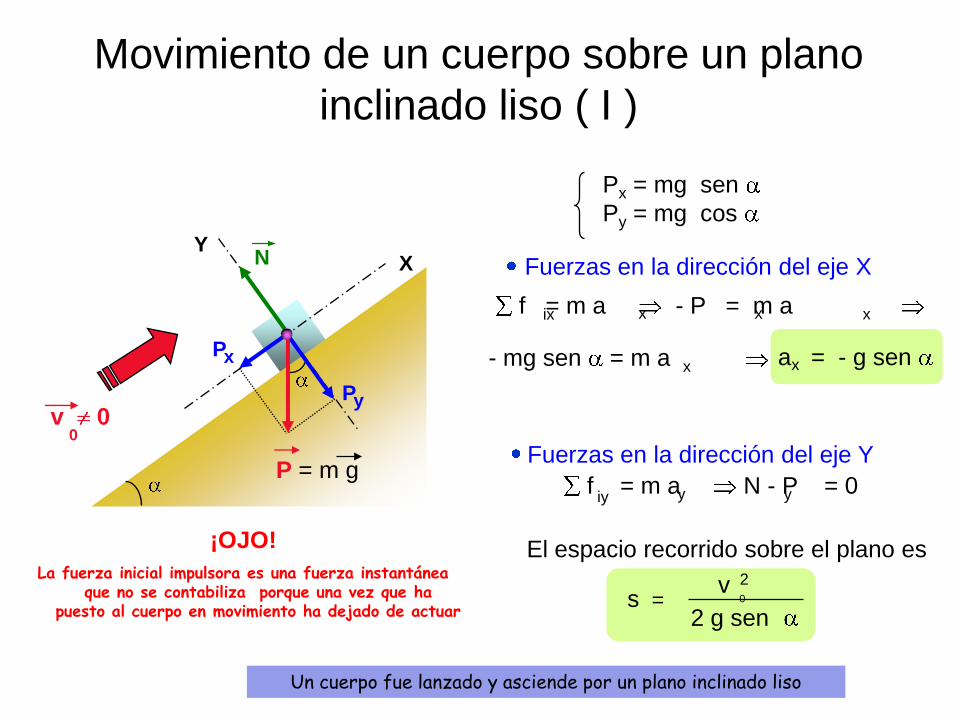
Movimiento de un cuerpo sobre un plano
inclinado liso ( I )
YXN
Px
Py
P = m g
v 00
¡OJO!
La fuerza inicial impulsora es una fuerza instantánea que no se contabiliza porque una vez que ha
puesto al cuerpo en movimiento ha dejado de actuar
f = m a - P = m aix xx x
- mg sen = m a x a = - g sen x
f = m a N - P = 0iy y y
Px = mg sen
Py = mg cos
El espacio recorrido sobre el plano es
s = 2 g sen
v0
2
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Un cuerpo fue lanzado y asciende por un plano inclinado liso

Movimiento de un cuerpo sobre un plano
inclinado liso ( II )
Y
XN
Px
Py
P = m g
v o = 0
Px = mg sen
Py = mg cos
f = m a - P = m aix xx x
- mg sen = m ax
a = - g sen x
N = Py
f = m a N - P = 0iy y y
v
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Un cuerpo desciende debido a la acción de la gravedad por un plano inclinado liso
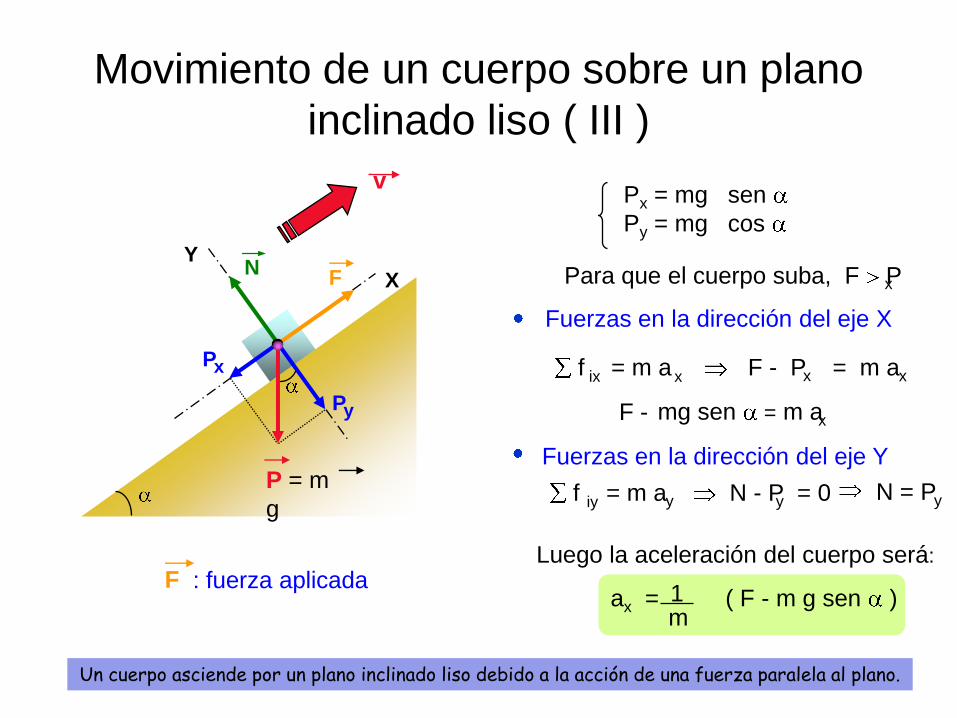
Movimiento de un cuerpo sobre un plano
inclinado liso ( III )
f = m a N - P = 0iy y y N = Py
ax = ( F - m g sen )m1
Luego la aceleración del cuerpo será:
Y
XN
Px
Py
P = m
g
v
F Para que el cuerpo suba, F Px
Px = mg sen
Py = mg cos
ix xx x
mg sen = m axF -
f = m a F - P = m a
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Un cuerpo asciende por un plano inclinado liso debido a la acción de una fuerza paralela al plano.
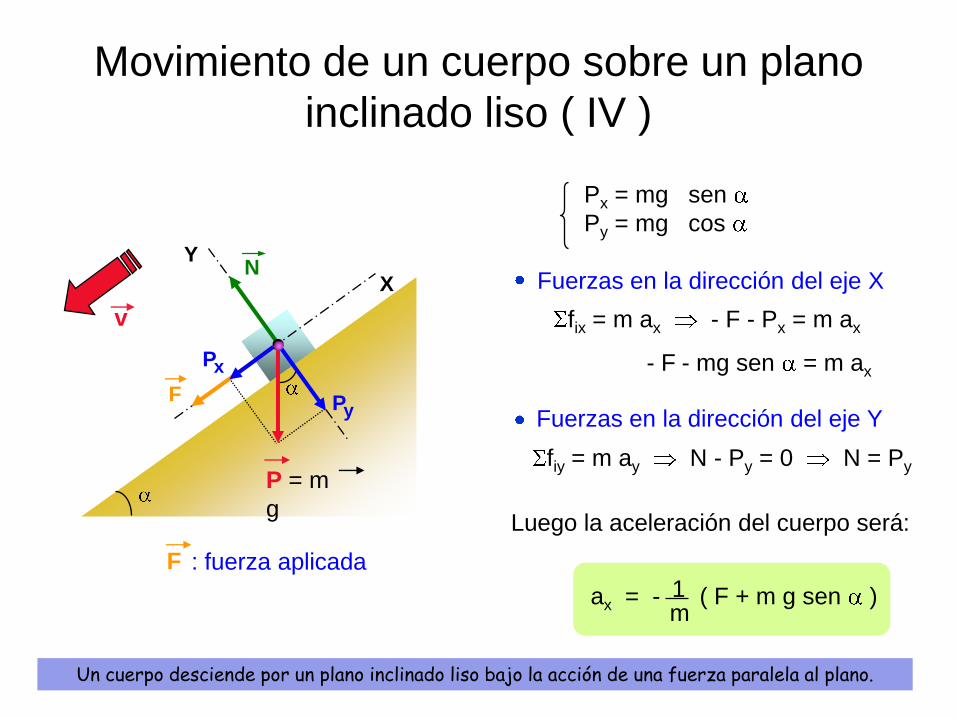
Movimiento de un cuerpo sobre un plano
inclinado liso ( IV )
Y
XN
Px
Py
P = m
g
v
F
Px = mg sen
Py = mg cos
Luego la aceleración del cuerpo será:
- F - mg sen = m ax
fix = m ax - F - Px = m ax
fiy = m ay N - Py = 0 N = Py
ax = - ( F + m g sen )m1
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Un cuerpo desciende por un plano inclinado liso bajo la acción de una fuerza paralela al plano.
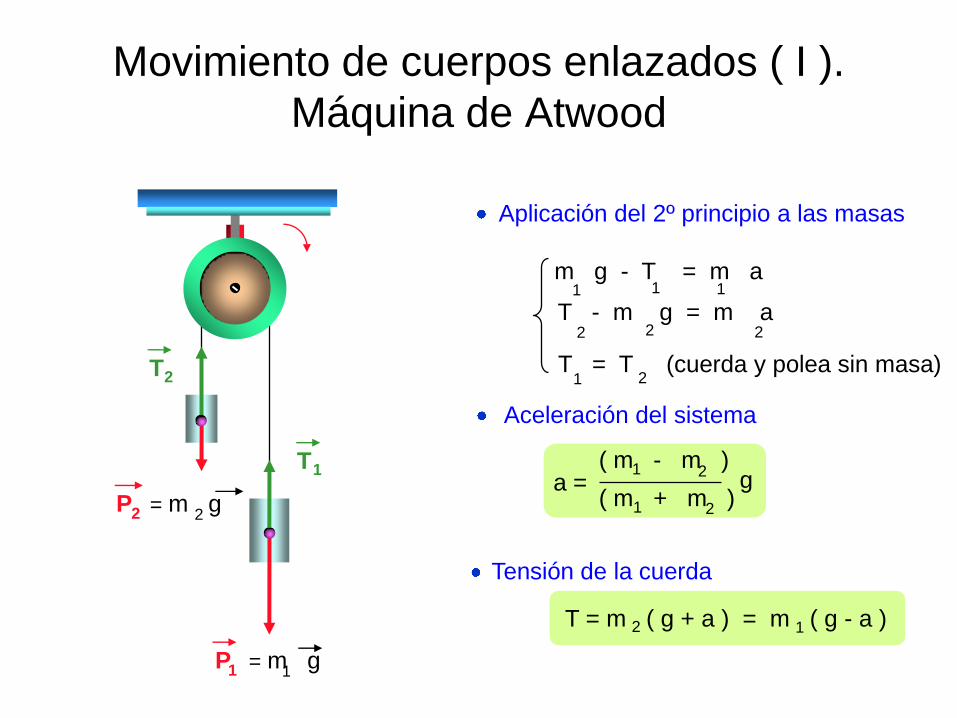
Movimiento de cuerpos enlazados ( I ).
Máquina de Atwood
T1
P = m g11
T2 1 2T = T (cuerda y polea sin masa)
a =( m - m )1 2
( m + m )1 2
g
2T = m ( g + a ) = m ( g - a )1
2T - m g = m a
2 2
m g - T = m a11 1
Aplicación del 2º principio a las masas
Aceleración del sistema
Tensión de la cuerda
P = m g22
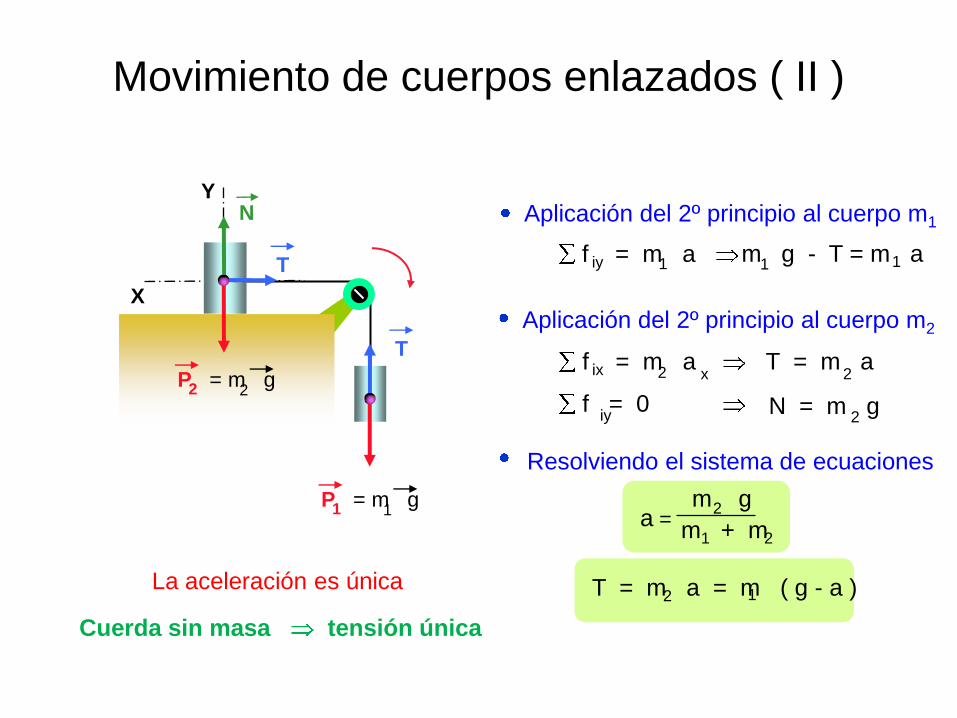
Movimiento de cuerpos enlazados ( II )
X
Y
P = m g11
P = m g22
T
T
N
f = 0 iy N = m g
2
m ga =
2
m + m21
T = m a = m ( g - a )2 1La aceleración es única
Cuerda sin masa tensión única
m g - T = m af = m a iy 11 1
Aplicación del 2º principio al cuerpo m1
Aplicación del 2º principio al cuerpo m2
Resolviendo el sistema de ecuaciones
f = m a T = m aix x 22
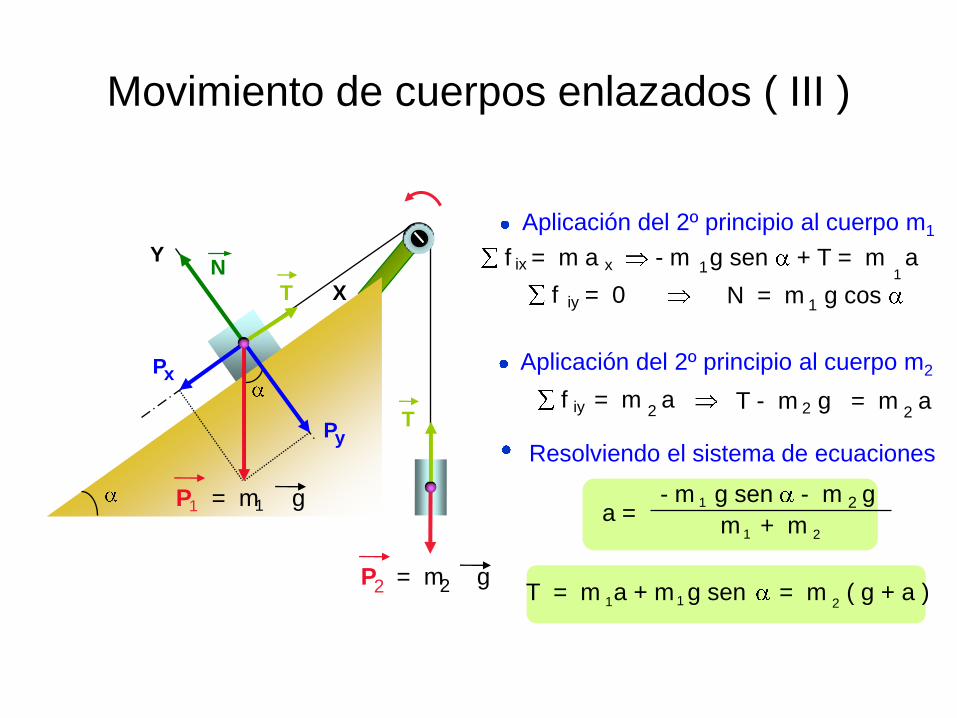
Movimiento de cuerpos enlazados ( III )
N
Px
PyT
P = m g1 1
T
P = m g2 2
Y
X f = 0iy N = m g cos 1
f = m a - m g sen + T = m aix x 11
Aplicación del 2º principio al cuerpo m1
Aplicación del 2º principio al cuerpo m2
Resolviendo el sistema de ecuaciones
- m g sen - m ga =
1
m + m 21
2
f = m a T - m g = m a22iy 2
T = m a + m g sen = m ( g + a )1 21
Sistema: Cuerpo 1
Entorno: Tierra , Hilo tensionado , Mesa
1m
Fa RResultanteF
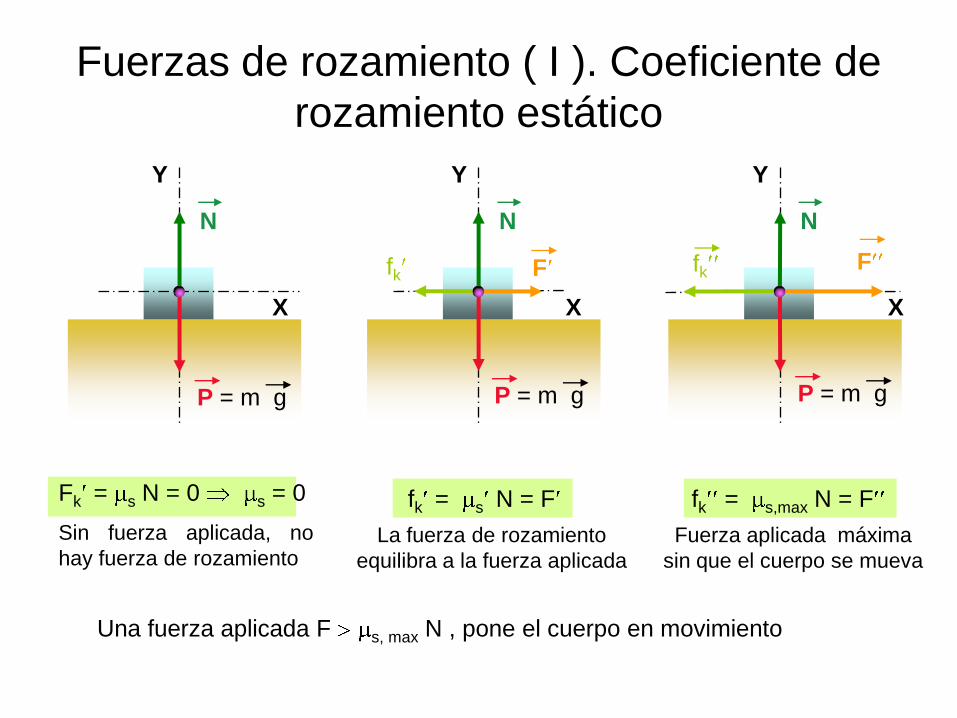
Fuerzas de rozamiento ( I ). Coeficiente de
rozamiento estático
Y
X
Y
X
Y
X
N
P = m g
N N
P = m g P = m g
F Ffk fk
Fk = s N = 0 s = 0
Sin fuerza aplicada, no
hay fuerza de rozamiento
fk = s N = F
La fuerza de rozamiento
equilibra a la fuerza aplicada
fk = s,max N = F
Fuerza aplicada máxima
sin que el cuerpo se mueva
Una fuerza aplicada F s, max N , pone el cuerpo en movimiento
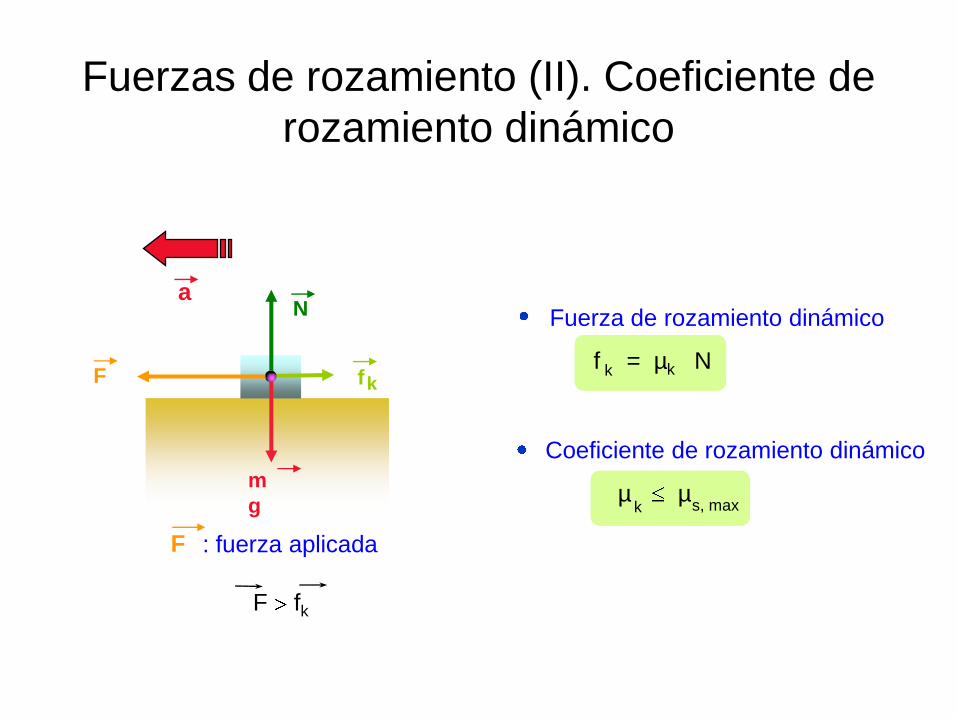
Fuerzas de rozamiento (II). Coeficiente de
rozamiento dinámico
m
g
N
F fk
a
f = µ Nk k
µ µk s, max
F fk
F : fuerza aplicada
Fuerza de rozamiento dinámico
Coeficiente de rozamiento dinámico
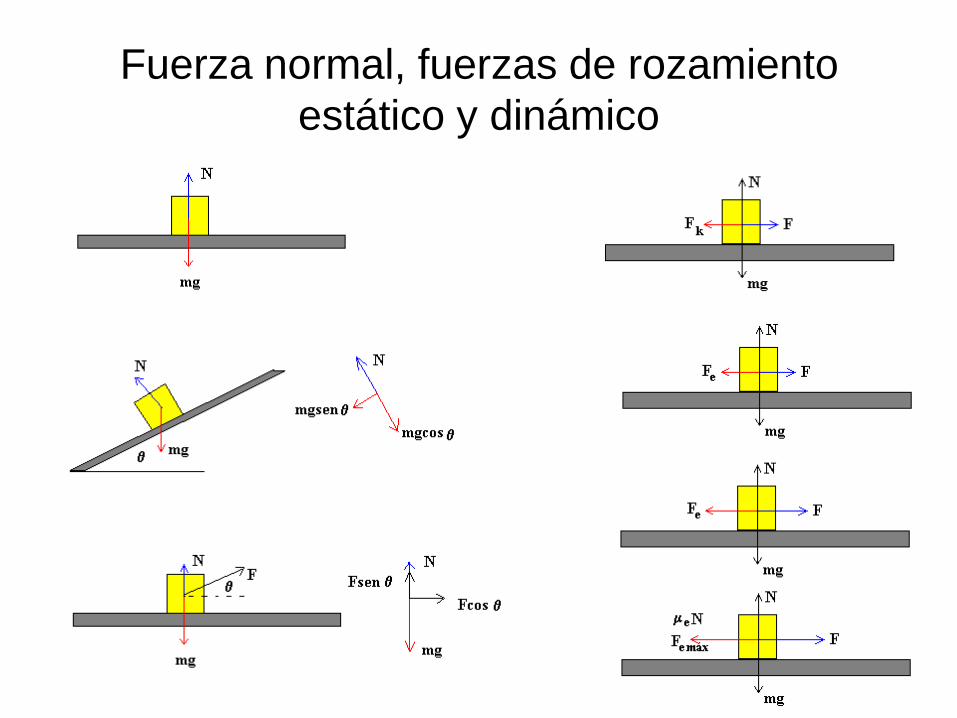
Fuerza normal, fuerzas de rozamiento
estático y dinámico
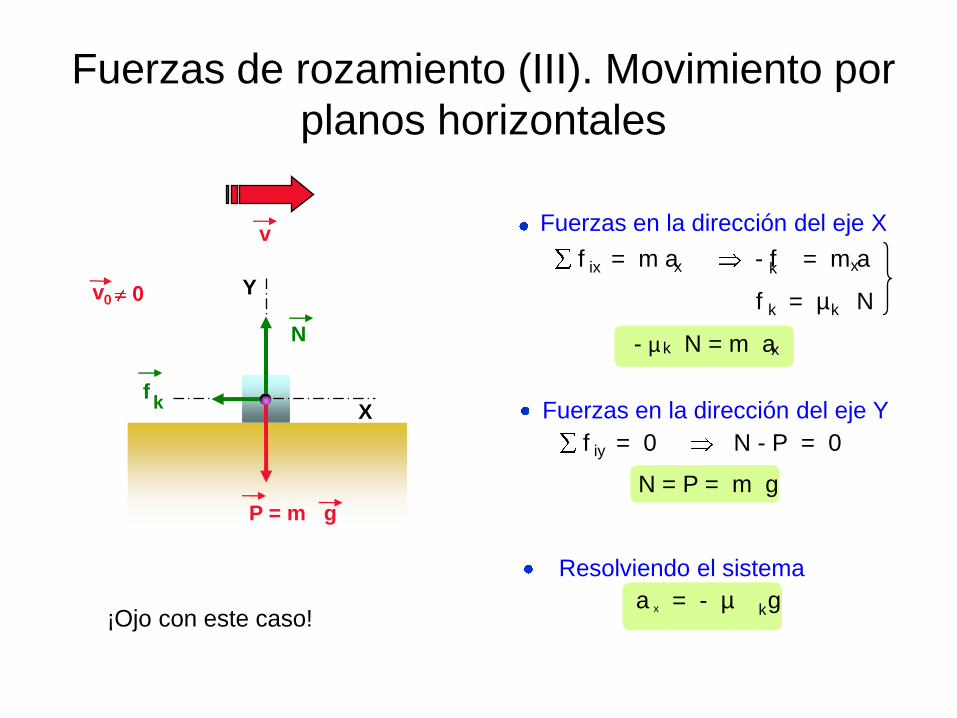
Fuerzas de rozamiento (III). Movimiento por
planos horizontales
N
X
Y
fk
P = m g
iyf = 0 N - P = 0
N = P = m g
ix x k
k k
f = m a - f = m a
f = µ N
x
µ N = m ak- x
v
v0 0
ka x = - µ g
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Resolviendo el sistema
¡Ojo con este caso!
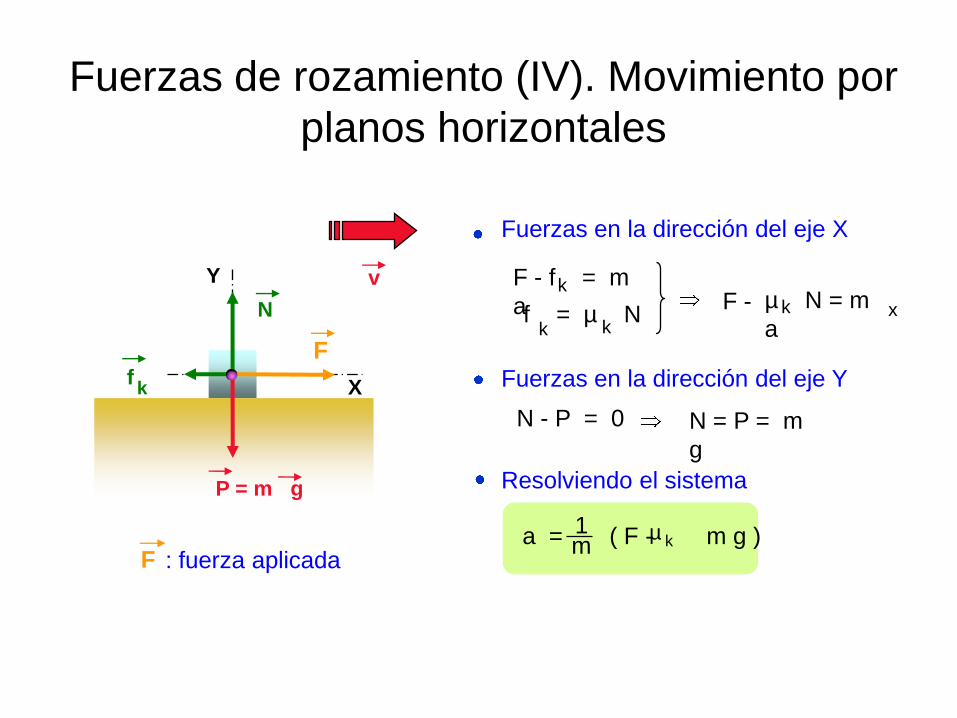
Fuerzas de rozamiento (IV). Movimiento por
planos horizontales
N
X
Y
P = m g
v
Ffk
N - P = 0 N = P = m
g
ka = ( F - m g )µ1m
F - f = m
ak
f = µ Nk k
kF - µ N = m
ax
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Resolviendo el sistema
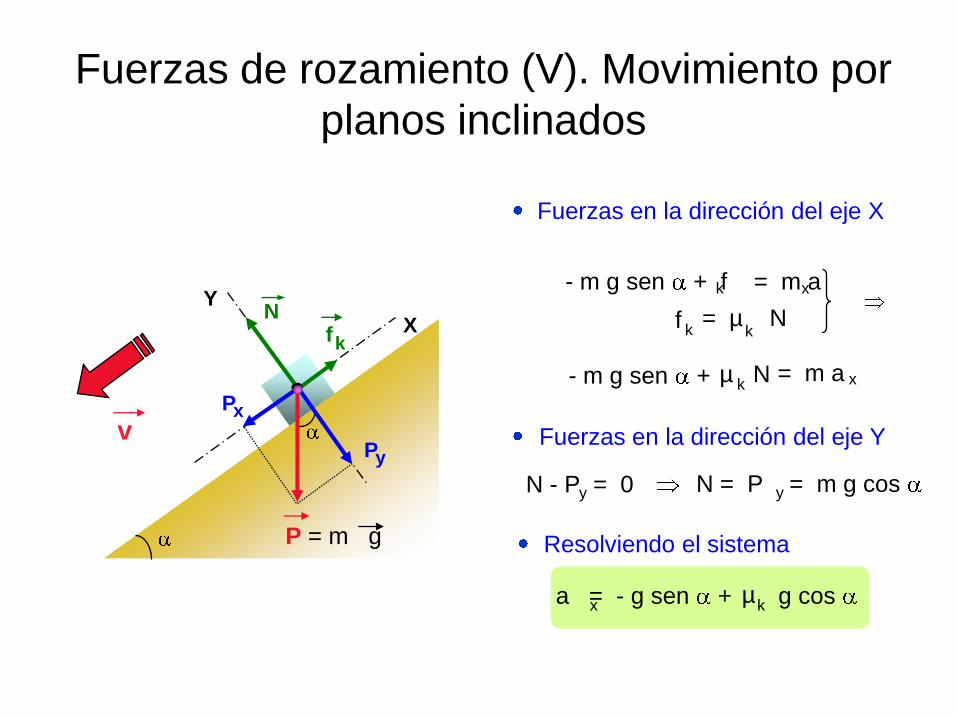
Fuerzas de rozamiento (V). Movimiento por
planos inclinados
Y
XN
Px
Py
P = m g
v
fk
yN - P = 0 N = P = m g cos y
- m g sen + f = m ak
f k k= µ N
x
- m g sen + µ Nk= m a x
kµ
xa = - g sen + g cos
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Resolviendo el sistema
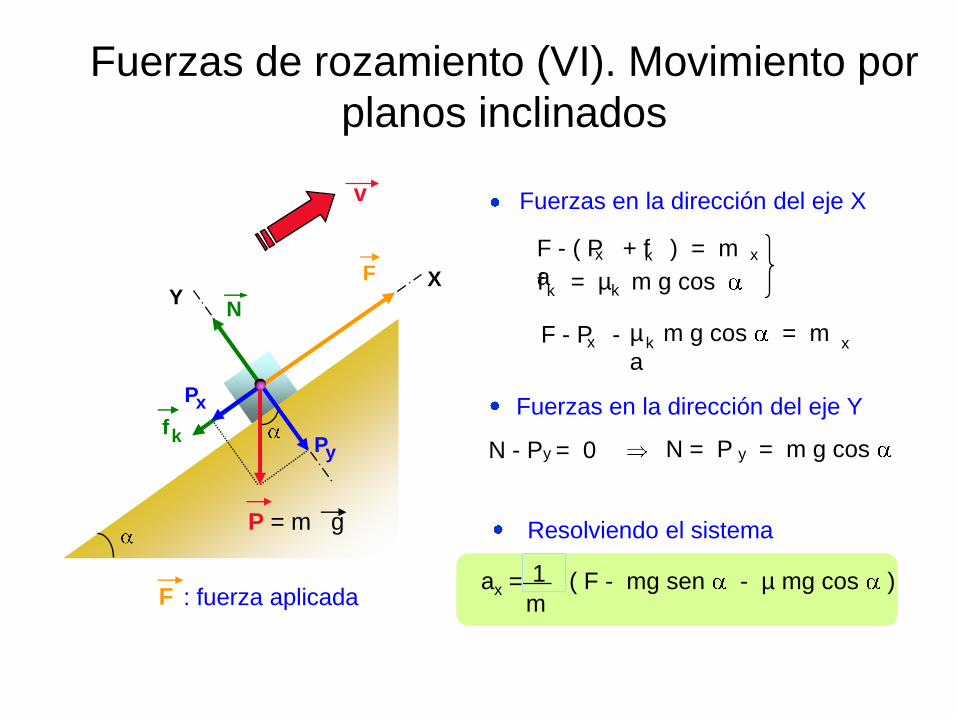
Fuerzas de rozamiento (VI). Movimiento por
planos inclinados
YX
N
Px
Py
P = m g
v
F
fkyN - P = 0 N = P = m g cos y
max = ( F - mg sen - µ mg cos )1
F - ( P + f ) = m
ax k
kf = µ m g cosk
x
F - P - µ m g cos = m
akx x
F : fuerza aplicada
Fuerzas en la dirección del eje X
Fuerzas en la dirección del eje Y
Resolviendo el sistema
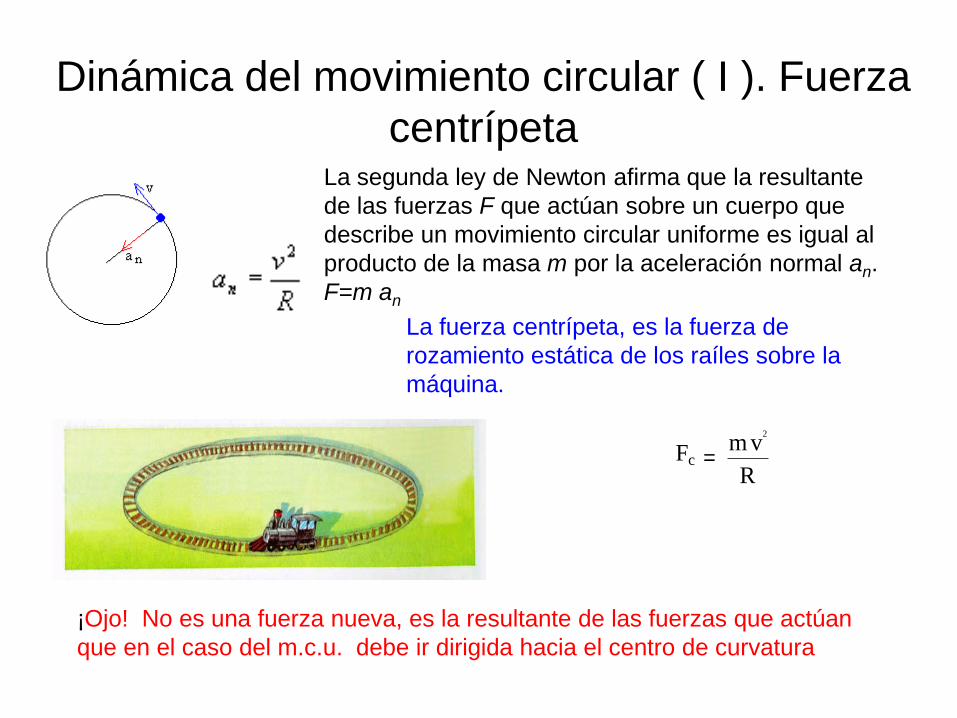
Dinámica del movimiento circular ( I ). Fuerza
centrípeta
La fuerza centrípeta, es la fuerza de
rozamiento estática de los raíles sobre la
máquina.
Fc =R
vm2
La segunda ley de Newton afirma que la resultante
de las fuerzas F que actúan sobre un cuerpo que
describe un movimiento circular uniforme es igual al
producto de la masa m por la aceleración normal an.
F=m an
¡Ojo! No es una fuerza nueva, es la resultante de las fuerzas que actúan
que en el caso del m.c.u. debe ir dirigida hacia el centro de curvatura
Aplicaciones de la dinámica
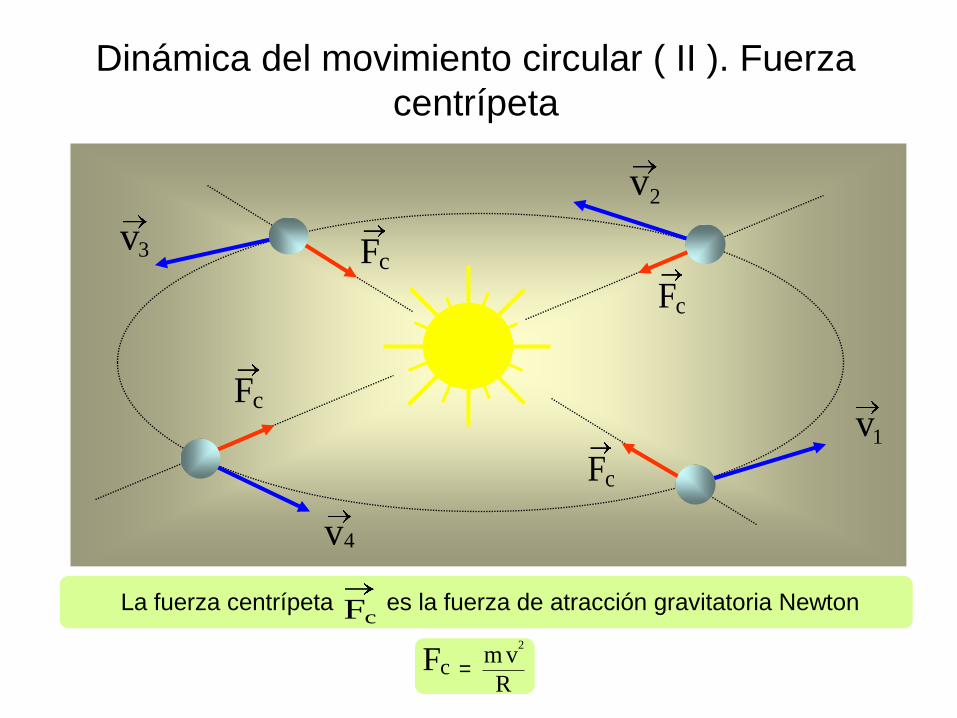
Dinámica del movimiento circular ( II ). Fuerza
centrípeta
v1
Fc
Fc
v2
v3 Fc
v4
Fc
La fuerza centrípeta es la fuerza de atracción gravitatoria Newton Fc
Fc =R
vm2
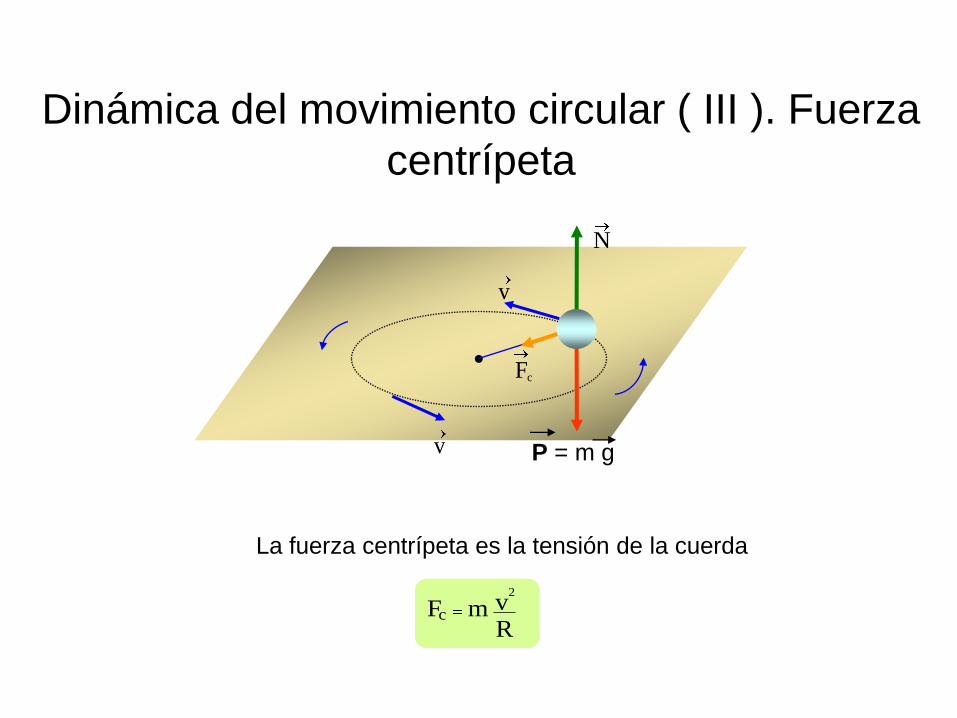
Dinámica del movimiento circular ( III ). Fuerza
centrípeta
N
La fuerza centrípeta es la tensión de la cuerda
cF
RvmF
2
c
P = m g
v
v
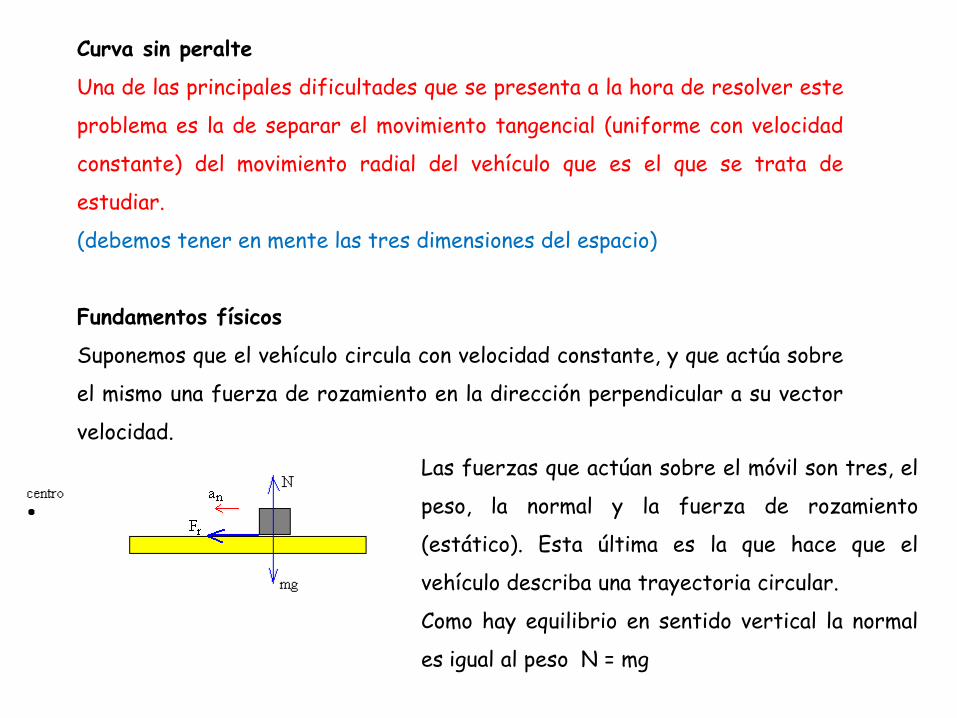
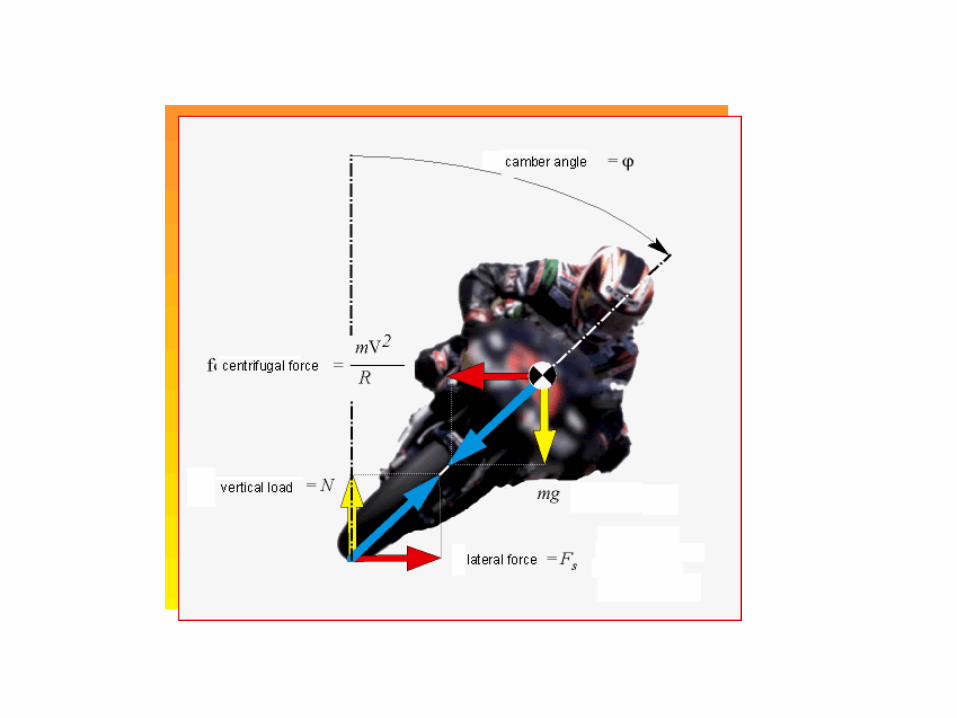
Curva sin peralte
Una de las principales dificultades que se presenta a la hora de resolver este
problema es la de separar el movimiento tangencial (uniforme con velocidad
constante) del movimiento radial del vehículo que es el que se trata de
estudiar.
(debemos tener en mente las tres dimensiones del espacio)
Fundamentos físicos
Suponemos que el vehículo circula con velocidad constante, y que actúa sobre
el mismo una fuerza de rozamiento en la dirección perpendicular a su vector
velocidad.
Las fuerzas que actúan sobre el móvil son tres, el
peso, la normal y la fuerza de rozamiento
(estático). Esta última es la que hace que el
vehículo describa una trayectoria circular.
Como hay equilibrio en sentido vertical la normal
es igual al peso N = mg
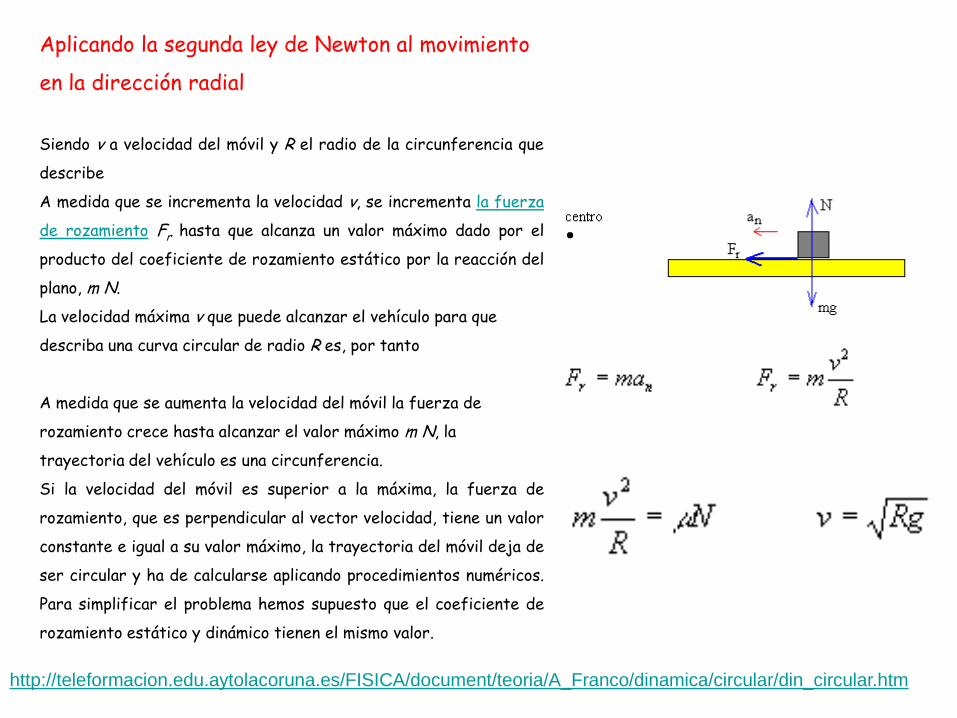
Aplicando la segunda ley de Newton al movimiento
en la dirección radial
Siendo v a velocidad del móvil y R el radio de la circunferencia que
describe
A medida que se incrementa la velocidad v, se incrementa la fuerza
de rozamiento Fr hasta que alcanza un valor máximo dado por el
producto del coeficiente de rozamiento estático por la reacción del
plano, m N.
La velocidad máxima v que puede alcanzar el vehículo para que
describa una curva circular de radio R es, por tanto
A medida que se aumenta la velocidad del móvil la fuerza de
rozamiento crece hasta alcanzar el valor máximo m N, la
trayectoria del vehículo es una circunferencia.
Si la velocidad del móvil es superior a la máxima, la fuerza de
rozamiento, que es perpendicular al vector velocidad, tiene un valor
constante e igual a su valor máximo, la trayectoria del móvil deja de
ser circular y ha de calcularse aplicando procedimientos numéricos.
Para simplificar el problema hemos supuesto que el coeficiente de
rozamiento estático y dinámico tienen el mismo valor.
http://teleformacion.edu.aytolacoruna.es/FISICA/document/teoria/A_Franco/dinamica/circular/din_circular.htm
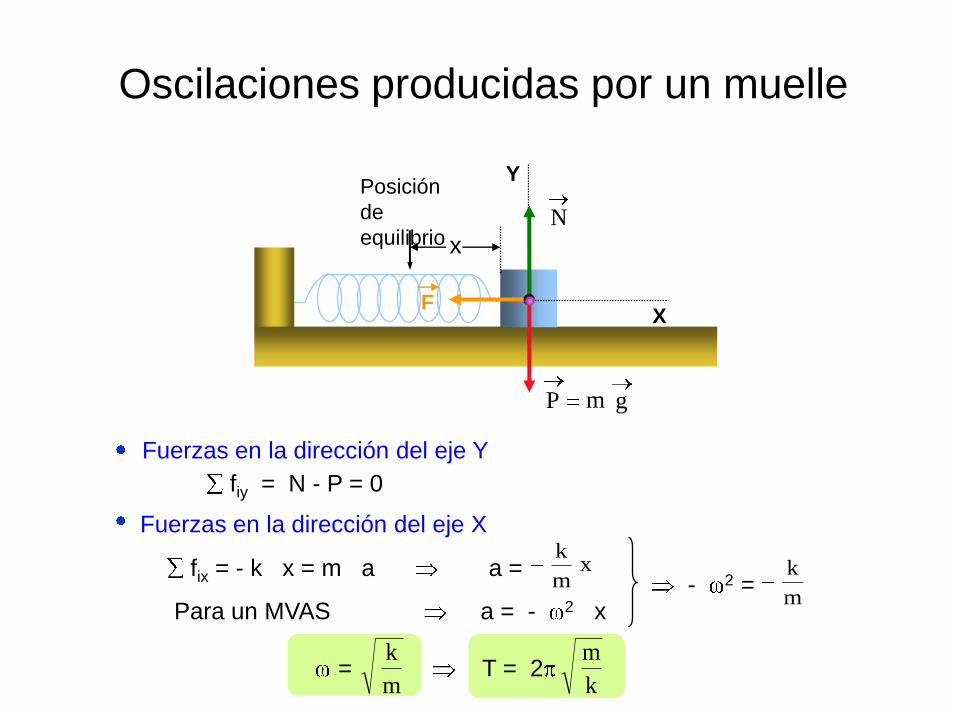
Oscilaciones producidas por un muelle
X
YPosición
de
equilibrio
fiy = N - P = 0
fix = - k x = m a a = xm
k
Para un MVAS a = - 2 x- 2 =
m
k
T = 2k
m=
m
k
gmP
x
Fuerzas en la dirección del eje Y
Fuerzas en la dirección del eje X
F
N