Anteproyecto_correccion3
42
DESARROLLO DE UNA METODOLOGIA PARA EL MODELAMIENTO DE LA DINAMICA DE VUELO DE UNA AERONAVE DE ALA FIJA EN REGIMEN SUBSONICO BAJO Anteproyecto de tesis para optar al título de ingeniero en electrónica SAMITH SNEIDER OÑATE MANZANO ALEXANDER GOMEZ MOLINA Director Ing. MARIO ANDRES CORDOBA CORPORACION UNIVERSITARIA AUTONOMA DEL CAUCA FACULTAD DE INGENIERIAS
-
Upload
alexander-gomez -
Category
Documents
-
view
108 -
download
0
Transcript of Anteproyecto_correccion3

DESARROLLO DE UNA METODOLOGIA PARA EL MODELAMIENTO DE LA DINAMICA DE VUELO DE UNA AERONAVE DE ALA FIJA EN REGIMEN
SUBSONICO BAJO
Anteproyecto de tesis para optar al título de ingeniero en electrónica
SAMITH SNEIDER OÑATE MANZANO
ALEXANDER GOMEZ MOLINA
Director
Ing. MARIO ANDRES CORDOBA
CORPORACION UNIVERSITARIA AUTONOMA DEL CAUCA
FACULTAD DE INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRONICA
ROBOTICA Y CONTROL
MAYO DE 2013

TABLA DE CONTENIDO
1. Planteamiento del problema
2. Estado actual del conocimiento
2.1. Trabajos relacionados2.2. Resumen
2.3. Aportes esperados
3. Hipótesis de solución
4. Justificación
5. Objetivos
5.1. Objetivo general5.2. Objetivos específicos
6. Metodología, Actividades y Cronograma
6.1. Metodología6.2. Cronograma
7. Recursos y presupuesto7.1. Recursos humanos
8. Financiación
9. Condiciones de entrega
10.Referencias Bibliográficas

1. Planteamiento del problema
Con el primer vuelo de una aeronave de ala fija, realizado en 1903 por Wilbur Wright, se incrementó el interés por la investigación y mejoramiento en el área. [1] Por sus características aerodinámicas, el avión es utilizado en distintos campos de aplicación, como lo son reconocimiento y observación de conflictos bélicos, incendios, catástrofes naturales, agricultura, fotogrametría, entre otras. [2],[3],[4],[5].El conocimiento de la dinámica de vuelo es fundamental para la realización de simuladores, sistemas de control y diseño de aeronaves, ya que permite predecir su comportamiento en vuelo y contribuye a aumentar los niveles de seguridad y rendimiento, sin este modelo matemático se dificulta la realización de maniobras en vuelo.[4],[6],[7],[8]. Distintos trabajos relacionados con control de estabilidad y análisis de vuelo en aeronaves de ala fija emplean modelos matemáticos obtenidos de varios autores, como Bernard Etkin [24], Jan Roskam [27] y John Anderson [28], ya que no es posible encontrar en la literatura, un esquema o procedimiento único que permita obtener el modelo de la dinámica en vuelo para aeronaves de ala fija.[7],[8]
¿Es posible crear una metodología para hallar el modelo de la dinámica de vuelo correspondiente a aeronaves de ala fija?

2. Estado actual del conocimiento
Contexto general.
Una aeronave de ala fija, tiene por característica principal, la generación de sustentación y de fuerza de propulsión como sistemas independientes. El sistema de propulsión se encarga del empuje hacia adelante y las alas tienen como objetivo la fuerza de sustentación, además existe la fuerza de arrastre, la cual se opone al movimiento del avión y por último se tiene en cuenta la aceleración de la gravedad la cual es provocada por el campo gravitacional de la tierra. Además de las fuerzas mencionadas anteriormente, están presentes los momentos del avión, que se producen por la acción de las fuerzas en torno a un punto, estos momentos se generan en torno a los tres ejes del avión, y provocan el giro del avión en cabeceo, guiñada y alabeo; los cuales son explicados a continuación.[1]
Cabeceo (Pitch):Es el giro realizado en torno al eje Y del avión, y su movimiento se puede observar como un ascenso o descenso de la nariz. [1]
Guiñada (Yaw):Es el giro realizado en torno al eje Z del avión, y su movimiento se puede observar en el cambio de la dirección horizontal de su vuelo. [1]
Alabeo (Roll):Es el giro realizado en torno al eje X del avión, y su movimiento se puede observar como una inclinación lateral del mismo. [1]
El estudio de la dinámica de vuelo, estabilidad y control; se hace necesaria para analizar el comportamiento y funcionamiento de una aeronave de ala fija. Para el estudio de la estabilidad se requiere el análisis del equilibrio, el cual se refiere al movimiento uniforme y sin rotación presente en la aeronave; respecto al área del control de la aeronave, se estudia el cambio de las condicionesde equilibrio.[24]
El modelo matemático de la aeronave representa teóricamente su funcionamiento y es esencial para conocer el comportamiento en vuelo del avión. Clásicamente, el modelo dinámico es hallado a partir de fuerzas y momentos presentes en la aeronave y con características propias de ella, como lo es el caso de los coeficientes aerodinámicos, los cuales se calculan por métodos clásicos empleando metodología experimental.[4], [9],[24].
El estudio de aeronaves de ala fija, emplea distintas temáticas o áreas de conocimiento entre ellas la dinámica de vuelo, la cual se subdivide en las siguientes disciplinas: Diseño Aerodinámico, mecánica de cuerpo rígido, mecánica de estructuras elásticas, dinámica del piloto humano, matemáticas aplicadas. De acuerdo a la finalidad del proyecto, no se hará énfasis en la mecánica de estructuras elásticas y dinámica del piloto humano.[24]

A continuación se da una introducción acerca de las temáticas más relevantes a utilizar en el desarrollo del proyecto:
Aerodinámica
Es una rama de la mecánica de fluidos que estudia el movimiento del aire y otros fluidos gaseosos, además de las fuerzas que actúan sobre los cuerpos que se mueven en estos fluidos [1]. El estudio de esta área es fundamental para entender la estabilidad y control de la aeronave.
Existen parámetros que son muy importantes, ya que estos afectan las características aerodinámicas de la superficie sustentadora, estos son la máxima razón de grosor, forma de la línea principal, forma de borde de ataque o parámetro ∆ y , radio del borde de ataque (l.e.r) y ángulo de borde de salida ∅ TE; estos parámetros son mostrados en la figura 1. [27]
Fig. 1 Definición de importantes parámetros geométricos de la superficie sustentadora. [27]
Además existen otros parámetros como lo son el centro aerodinámico (A.C), el cual es definido como aquel punto en la cuerda principal alrededor del cual el coeficiente de momento de cabeceo (CM) es invariante con el ángulo de ataque (α); el otro parámetro es el centro de presión (C.P), el cual es el punto de la cuerda donde actúa la resultante de la distribución de presión (fuerza aerodinámica resultante). Las fuerzas y momentos se nombran a continuación.
Sustentación (Lift): Es necesaria para mantener en vuelo a la aeronave. La diferencia de presiones existente entre la zona de alta y baja presión de las superficies expuestas a fluidos en movimiento (en el caso de las aeronaves, dicho fluido corresponde al aire) genera un efecto de succión que provoca la sustentación del elemento.[7],[17]

L=q∗S∗CL [N ](1)
donde q=12∗ρ∗V 2[ N
m2](2)
CL=L
q∗S
Donde L es la sustentación, q es la presión dinámica,ρ es la densidad del
aire expresado en[ kgm3
],Ses el área del ala expresado en[m2 ]yCLes el
coeficiente de sustentación el cual es un término adimensional.
A continuación se presenta la figura 2. En la cual se grafica el CL y α, este último es ángulo de ataque el cual está formado por la cuerda principal del ala y el viento relativo.
Fig. 2 Curva genérica de sustentación. [28]
Arrastre (Drag): Esta fuerza es la que se opone al movimiento de la aeronave y lo ideal es que sea pequeña. [1],[24]
D=q∗S∗C D[N ](3)
CD=D
q∗S
Donde D es la fuerza de arrastre y CD es el coeficiente de arrastreel cual es un término adimensional.
En la figura 3. Se observa las fuerzas de L,D y R además del viento relativo (V ∞) y α.

Fig. 3 Fuerzas de sustentación, arrastre y resultante. [28]
Momento de cabeceo: La sustentación total y momento de cabeceo de una aeronave son funciones del ángulo de ataque, ángulo de la superficie de control, numero Mach, numero de Reynolds, coeficiente de empuje y presión dinámica. Un correcto calculo de de la sustentación y momento de cabeceo es uno de las mayores tareas en un análisis de estabilidad estático. [24] Se representa con la siguiente formula.
M=q∗S∗c∗CM [m∗N ](4)
CM= Mq∗S∗c
Donde M es el momento de cabeceo, CMcoeficiente del momento de cabeceo el cual es un término adimensional y c es la longitud de la cuerda aerodinámica principal expresado en metros[m ].
Velocidad en vuelo:
La velocidad de las aeronaves es clasificada según su número de mach, el cual es el cociente entre la velocidad local y la velocidad del sonido. De acuerdo al número de mach, se presenta la siguiente clasificación, la cual toma como referencia el número de mach 1 (uno). [24].
Régimen incompresible: El número de mach es altamente inferior a uno. Régimen subsónico: El número de mach es cercano a la unidad. Régimen transónico: El número de mach es altamente cercano a la unidad
por encima o por debajo. Régimen supersónico: El número de mach es superior a uno. Régimen hiperpersónico El numero de mach es altamente superior a la
unidad.
En la siguiente figura, se observan los diferentes regímenes de vuelo:

Fig. 4 Regímenes de vuelo. [24]
Ecuaciones de movimiento y ejes del sistema:
Las ecuaciones de movimiento de un avión rígido, están generalmente referenciadas a los sistemas de coordenadas cuerpo y tierra. [27]
El sistema de referencia cuerpo (X ,Y ,Z), tiene su origen en el centro de gravedad de la aeronave, su eje X apunta paralelamente hacia el morro de la aeronave, el eje Yhacia el ala derecha y el eje Z hacia abajo. En este marco de referencia son definidos los momentos de cabeceo (L), alabeo (M ) y guiñada (N ) del avión. [7],[27]
El sistema de coordenadas tierra ( X ´ , Y ´ , Z ´), tiene su origen en cualquier punto definido de la tierra. Este sistema es relacionado con la aeronave mediante los
vectores r⃗ y r⃗ p´. En la siguiente figura, se observa la posición de las diferentes
coordenadas para los ejes cuerpo y tierra. [7],[27]
Fig. 5 sistema de coordenadas ejes cuerpo y ejes tierra.[27]
Las ecuaciones de movimiento de la aeronave son obtenidas a partir de fuerzas y momentos aplicados mediante la segunda ley de newton.[27]
Las siguientes ecuaciones pertenecen a las ecuaciones de movimiento y están relacionadas con los sistemas de referencia observados en la fig.5:

Las siguientes ecuaciones pertenecen a las ecuaciones de movimiento y están relacionadas con los sistemas de referencia observados en la fig.5:
ddt∫v
QA
dr´
→
dtdv=∫
v
QA gdv+∫S
(F→
)ds (5)
ddt∫v
( r→) xQA
dr´
→
dtdv=∫
v
(r→
)x QA gdv+∫S
(r '→
)ds (6)
Donde:
∫v
Representa el volumen de la aeronave.
∫S
Representa la superficie de la aeronave.
La relación ddt∫v
QA
dr´
→
dtdv describe el momento lineal, mientras que
ddt∫v
( r→) xQA
dr´
→
dtdv describe el momento angular.
La relación ∫v
QA gdv+∫S
(F→
)ds describe las fuerzas aplicadas y la relación
∫v
(r→
) xQA gdv+∫S
(r '→
)dsdescribe los momentos aplicados.
En las siguientes figuras, están representados las fuerzas y momentos que actúan en la dinámica de vuelo de la aeronave: [27]

Fig. 6. (a) Fuerzas aerodinámicas y de empuje (b) aceleración de la gravedad.
En la figura 6.a, están representadas la fuerzas aerodinámicas (F A) y de empuje (FT) presentes, respecto a las tres coordenadas de referencia (X ,Y ,Z). Su relación
matemática es expresada en las ecuaciones (7) y (8) respectivamente.
F A=i FA x+ j F Ax
+k F Ax[N ](7 )
FT=i FT x+ j FTx
+k FTx[N ] (8)
Donde (i , j , k ), corresponden a los vectores ortogonales asociados a las fuerzas en el sistema de referencia.
En la figura 6.b, están representadas las componentes de aceleración gravitacional, su relación matemática esta descrita por la ecuación (9).
g→
=i gx+ j gy+k gz[
m
s2](9)
Los momentos aerodinámicos y de empuje, están representados en la fig. 7.a, donde :
(LA) y (LT) corresponden a los momentos aerodinámicos y de empuje respectivamente, sobre el eje X .
(M A) y (M T) corresponden a los momentos aerodinámicos y de empuje respectivamente, sobre el eje Y .
(N A) y (NT) corresponden a los momentos aerodinámicos y de empuje respectivamente, sobre el eje Z.
Las expresiones matemáticas para los momentos son las descritas en las ecuaciones (10) y (11).
Fig. 7. (a) Fuerzas aerodinámicas y de empuje (b) aceleración de la gravedad.

M A=i LA+ j M A+k N A [m∗N ](10)
M T=i LT+ j M T+k NT [m∗N ](11)
En la figura 7.b, están representadas las velocidades lineales y angulares, respecto a las tres coordenadas X ,Y ,Z.
Las componentes de velocidad angular (ω→
) y lineal (V p
→) respecto a los tres ejes,
están definidas por P ,QR , y U ,V ,W respectivamente. Y sus relaciones matemáticas están descritas por las ecuaciones (12) y (13).
ω→
=iP+ jQ+kR [ rads
](12)
V p
→
=iU+ jV +kW [ms
](13)
Dinámica de vuelo: Para la estabilidad y control durante un vuelo en estado estable, una aeronave debe cumplir con ciertos características como las siguientes: suficiente potencia de control para mantener un estado estable y vuelo en línea recta, posibilidad de ser maniobrado de un estado estable a otro en modo seguro, el avión debe ser ajustado en ciertas condiciones de vuelo y por último, las fuerzas de control en la cabina del piloto deben estar en el máximo y mínimo rango aceptable, esto incluye cambios en la configuración del avión como: flaps arriba/abajo, tren de aterrizaje arriba/abajo etc. [27] La estabilidad estática, la cual es la tendencia de un avión a desarrollar fuerzas y momentos en los cuales se opone una perturbación instantánea de un movimiento variable desde una condición de vuelo en estado estable. A partir de este concepto se desarrolla un criterio muy importante para separar las condiciones de un vuelo en estado estable, en categorías de estable, inestable y neutralmente estable.

Fig. 8 Ejemplo de equilibrio estable, inestable y neutralmente estable. [27]
El criterio de estabilidad es aplicado en el análisis de perturbaciones de velocidad lateral y vertical, perturbaciones en el ángulo de ataque y deslizamiento, también se hace necesario para el estudio en las perturbaciones en las velocidades angulares.
Los movimientos de una aeronave pueden ser separados en dos partes, que se nombran a continuación.
Movimiento longitudinal o simétrico: Se caracteriza porque el ala permanece en nivel y el centro de gravedad se mueve únicamente en el plano vertical. Este movimiento puede ser alterado por controles aerodinámicos que posee la aeronave, los cuales son: elevadores, flaps del ala, spoilers y rotación de cola horizontal; estos controles tienen efecto sobre el movimiento de cabeceo (pitch). En la figura 9 se observa la cola de un avión con el ángulo elevador (δ e), acompañado de dos graficas que
muestran el cambio de los coeficientes de CM y CL con respecto al ángulo de ataque. [24]

Fig. 9 Efecto del ángulo elevador en la curva CM . Angulo elevador. (a) Curva CM – α. (b)
Curva CL – α. (c)
Movimiento lateral - direccional: En este se ejecutan los movimientos de alabeo, guiñada y deslizamiento; el ángulo de ataque, velocidad y ángulo de elevación del eje x permanece constante [24]. Este movimiento puede ser alterado por controles aerodinámicos como lo son: alerones y timón de dirección, los cuales producen los momentos de alabeo (L) y guiñada (N), respectivamente.

Fig. 10 Angulo de deslizamiento β y momento de guiñada N . [24]
Actitud de la aeronave:
La actitud de la aeronave es su orientación respecto al sistema de referencia de navegación; clásicamente la actitud es descrita mediante ángulos de Euler, sin embargo existen otros métodos para su representación como lo son MCD (Matriz de Cosenos Directores) y Cuaterniones. A continuación se da una breve descripción de las metodologías nombradas:
Ángulos de Euler:
La orientación o posición angular es una descripción de su posible colocación dentro de un sistema de referencia local. Un método para especificar la orientación angular de un sistema de coordenadas respecto a otro, se realiza a través de tres ángulos llamados ángulos de Euler, con estos se puede realizar una sucesión ordenada de giros para definir el cambio de un sistema de coordenadas a otro. Los ángulos de Euler coinciden con los ángulos de navegación convencionales: roll φ (alabeo), yaw ψ (guiñada), pitch θ (cabeceo). [1] ,[24].
La actitud de la aeronave, se puede describir mediante tres rotaciones. [24] En la siguiente figura, se observan las rotaciones respecto a dos sistemas de referencia.

Fig.11 Rotación básicas en los ejes (X a1), (X a2) y (X a3) respectivamente.
La matriz de cambio de coordenadas (Cnb) es obtenida a partir de las ecuaciones
(14), (15) y (16). Las cuales representan los giros para cada coordenada y se presentan a continuación. Estas ecuaciones representan el cambio de coordenadas de navegación a coordenadas cuerpo (avión).[24]
1. Giro en yaw(ψ )
Cψ=¿[ cosψ sin ψ 0
−sinψ cosψ 00 0 1](14)¿
2. Giro en Pitch (θ)
Cθ=¿[cosθ 0 −sin θ
0 1 0sinθ 0 cosθ ](15)¿
3. Giro en Roll(ϕ)
Cϕ=¿[1 0 0
0 cosϕ sinϕ0 −sin ϕ cosϕ](16 )¿
Al realizar la multiplicación de las tres matrices anteriores, se obtiene la matriz
de cambio de coordenadas (Cnb):
Cnb=[ cosθ cosψ cosθ sinψ −sin θcosψ sinθ sin ϕ−¿ sinψcos ϕ¿cosψcosϕ+sinψ sinθ sinϕ ¿ ¿
cosθcosϕ¿](17)
Matriz de cosenos directores (MCD):

La orientación de un sistema de referencia respecto a otro haciendo uso del método MCD, está determinada por el cambio de sus bases.
A continuación se tiene la matriz de cosenos directores ( CSS´
).
CSS´
=[ ex ´ ex e x´ e y ex´ e z
e y ´ e x e y ´ ey e y ´ e z
ez´ ex ez´ e y ez´ e z
](18)La anterior matriz está dada para definir la orientación del sistema de referencia S, respecto al sistema de referencia S´, donde S está determinado por la base
de vectores unitarios (ex , e y ,ez) y S´ por la base de vectores unitarios (ex ´ , ey´ ,e
z´)
Cuaterniones:
Los Cuaterniones son un método para representar la actitud de la aeronave, y corresponden a una extensión de los números reales a cuatro dimensiones.[25],[26]
Un cuaternion es descrito de la siguiente forma:
q=q0+iq1+ jq2+k q3(19)
Donde:
q0,q1,q2,q3: Corresponden a la parte real del cuaternion.
i , j , k : Corresponden a la parte imaginaria del cuaternion.
La actitud de una aeronave se puede representar haciendo uso de Cuaterniones mediante las siguientes ecuaciones, las cuales están dadas en
términos de eje (e→
) y ángulo de Euler (θ):
q0=cosθ2
(20)
q→
= sinθ
2e→ (21)
2.1. Trabajos relacionados

Ámbito Internacional
En 2012, la Universidad de Zaragoza, España; como proyecto final de carrera realiza el modelo dinámico para un avión aeromodelo de 3 grados de libertad; este modelo analítico tiene sus bases conceptuales a partir de fuerzas y momentos presentes en el movimiento en un solo plano. Posteriormente, el modelo es simulado y analizado mediante el software Matlab simulink. Este proyecto es finalizado en su totalidad obteniendo buenos resultados. [6]
En la Universidad de Concepción en el año 2003, se realizó el análisis numérico de la estabilidad y control de una aeronave no tripulada, en este proyecto obtienen el modelo del movimiento longitudinal a partir de las ecuaciones de movimiento, tomando como referencia las derivadas de control y estabilidad, ya que de esta forma es posible obtener la geometría, aerodinámica y condiciones de vuelo del avión. Este proyecto es finalizado con en su totalidad [18]
En 2007, el CID MECATRONICS, Centro de Investigación y Desarrollo se desarrolla un modelo matemático para el perfil del ala de una aeronave, a partir de métodos analíticos y computacionales. Este proyecto es finalizado en su totalidad obteniendo buenos resultados. [13]
En el 2010, en la universidad de Córdoba Argentina, se realiza el modelo dinámico y construcción de una aeronave de ala fija, presentando como principal característica el modelo matemático, el cual es generado a partir del estudio de cada componente de la aeronave en desarrollo. Este proyecto es finalizado con en su totalidad [17]
En la Universidad Nacional de Córdoba, Argentina; en el año 2009 son desarrollados los modelos de dinámica y aerodinámica para ser implementados en un simulador de vuelo de seis grados de libertad. Estos modelos son obtenidos a partir del uso de quaterniones y fundamentación teórica de fuerzas y momentos presentes en aeronaves de ala fija. Este proyecto fue concluido en su totalidad [7]
En el año 2011, en la universidad de ciencia y tecnología de Norwegian, se realizan dos modelos matemáticos que describen la dinámica de aeronaves y satélites. El modelo correspondiente a aeronaves de ala fija es descrito para los movimientos lateral y longitudinal expresados en espacio de estados y es realizada la linealización del modelo incluyendo perturbaciones. Este proyecto es finalizado en su totalidad. [14]
En La Universidad Católica de Chile en el año 2000, como proyecto de grado para optar el titulo de magister en ciencias de la ingeniería, se realiza el control difuso

de un vehículo aéreo no tripulado, para el cual se describe la dinámica de vuelo longitudinal basada en fuerzas y momentos relacionados con el avión. Los objetivos planteados para el proyecto, fueron cumplidos satisfactoriamente. Es posible la continuidad del proyecto mediante trabajos futuros como el estudio más a fondo del modelo matemático e implementación de otros tipos de sensores [1]
En el año 2008, Girish Chowdhary y Ravindra Jategaonkar realizan una comparación entre distintos tipos de filtros kalman para la estimación de los parámetros aerodinámicos de vuelo en aeronaves de ala fija y ala rotatoria. Este proyecto es finalizado correctamente y con resultados favorables para cada prueba[16]
En la universidad Simón Bolívar de Venezuela en el año 2011, como proyecto de investigación, se realiza el cálculo de los coeficientes aerodinámicos de una aeronave de ala fija, empleando un método que permite obtener fuerzas aerodinámicas no viscosas, este método es conocido como Páneles y es posible la utilización del software de código abierto Pan Air . Este proyecto es finalizado en su totalidad.[5]
Para el año 2011, en la Universidad de Sevilla España, como proyecto de fin de carrera, se presenta un estudio detallado de la dinámica de vuelo para aeronaves de ala fija y ala rotatoria. En este proyecto de investigación se destaca la utilización del software CIFER para la identificación de los parámetros aerodinámicos en los dos tipos de aeronaves. Este proyecto es finalizado con en su totalidad [3]
En México, para el congreso anual de la asociación de control automático 2010, se presenta un proyecto de investigación, el cual aborda la temática de búsqueda de coeficientes aerodinámicos de una aeronave de ala fija, a partir de técnicas de inmersión e invarianza. Se propone como trabajo futuro el cálculo del número de Reynolds y determinar los coeficientes aerodinámicos que conforman las reacciones aerodinámicas. [8]
En el año 2012 en la Universidad Central de las Villas se realiza la identificación de un vehículo aéreo no tripulado mediante cuatro técnicas; modelo analítico, identificación clásica, modelo neuro-borroso y un modelo borroso evolutivo. Este proyecto es finalizado con en su totalidad [9].
En [19], el Instituto de Tecnología Royal Melbourne en el año 1996, realiza la identificación del modelo dinámico de una aeronave usando pruebas de vuelo; para el desarrollo de este modelo utilizan técnicas de identificación de parámetros como el método MLM (Maximum Likelihood

Method) y se realiza la simulación del modelo utilizando la herramienta computacional matlab-simulink. Este proyecto es finalizado en su totalidad.
Ambito Nacional
Dentro del proyecto denominado AURA desarrollado en 2009, de la universidad Pontifica Bolivariana, se desarrolla el modelo dinámico para un avión no tripulado, apartir de fuerzas y momentos presentes en la dinámica de la aeronave. Este modelo es generado en términos de los coeficientes aerodinámicos, los cuales dependen de las características técnicas del avión. Para el cálculo de los coeficientes, es usado un filtro de kalman extendido. Este proyecto es finalizado en su totalidad, obteniendo resultados favorables. [4]
Ambito Local
En el año 2011, Fernando Aparicio Urbano realiza el proyecto Dinámica de vuelo y simulación de los parámetros de diseño de una aeronave no tripulada, en este proyecto se desarrolla un sistema de adquisición de datos para analizar la dinámica de vuelo y se realiza todo el proceso de diseño de la aeronave, posteriormente se lleva a cabo la simulación del prototipo para su respectivo análisis. Este proyecto es finalizado en su totalidad y se recomienda realizar un mejor procesamiento de los datos obtenidos para el desarrollo de un modelo dinámico de la aeronave. [20]
En 2007, Mario Andrés Córdoba realiza el proyecto Efigenia EJ-1B Mozart S/VTOL el cual es un prototipo de aeronave de ala fija y rotatoria, en este trabajo se realiza el análisis, diseño, Modelamiento, implementación y simulación de los sistemas de una aeronave no tripulada de despegue y aterrizaje vertical. En la actualidad el autor continúa con la investigación en el área de la aeronáutica y UAVs. [21]
2.2. Resumen
En la tabla 1. se presenta un resumen o recopilación de los trabajos más relevantes encontrados en la revisión del estado del arte, incluyendo para cada referencia su aporte y destacando las diferencias encontradas con el proyecto a realizar.
Referencia Aportes Diferencias DetectadasModelo dinámico de una aeronave con tres
Se realiza el modelo dinámico para una aeronave
Para hallar el modelo dinámico, se tendrán

grados de libertad de ala fija, teniendo en cuenta un solo eje de rotación. Para la obtención de los coeficientes aerodinámicos, se realizan simulaciones de maniobras en vuelo, a través de la herramienta MatlabSimulink.
en cuenta los tres ejes de rotación X, Y, Z.
Los coeficientes aerodinámicos serán calculados a partir de datos experimentales obtenidos de sensores inerciales y de posicionamiento global, los cuales ya fueron adquiridos por parte de los estudiantes.
Modelo matemático para un vehículo no tripulado de ala fija, usando un estimador de parámetros “filtro de kalman”
Se realiza elmodelo dinámico de un avión, para el cual, los coeficientes aerodinámicos fueron estimados a partir de software, ya que no realizaron pruebas en vuelo.
Como se menciono anteriormente, los coeficientes aerodinámicos dependientes de cada aeronave, son estimados a partir de pruebas en vuelo.
Modelos de dinámica del vuelo y aerodinámico deAeronaves para un simulador de vuelo 6-dof en tiempoReal
Se realiza un modelo dinámico para ser implementado en un simulador de vuelo de 6 grados de libertad.El cálculo de la actitud de la aeronave está basado en el uso de cuaterniones.
El modelo dinámico a obtener,no está regido a una aplicación en específico, ya que puede ser implementado en diferentes campos de la aeronáutica.
Analisis numérico de la estabilidad y control de una aeronave no tripulada.
Se obtiene el modelo del movimiento longitudinal a partir de las ecuaciones de movimiento, tomando como referencia las derivadas de control y estabilidad, de esta forma es posible obtener la geometría, aerodinámica y condiciones de vuelo del avión.
Se realizara el Modelamiento de la aeronave en movimiento longitudinal y lateral de seis grados de libertad.
Identification of model aircraft dynamic using flight testing.
Obtienen las derivativas de control y estabilidad del prototipo de aeronave no tripulada T240 utilizando el método MLM (MaximumLikelihoodMethod).
Se obtendrán medidas de los sensores inerciales y gps para la estimación de parámetros. No se utilizará el túnel de

viento, ya que es un equipo costoso y no se tiene en el departamento del Cauca.
Dinámica de vuelo y simulación de los parámetros de diseño de una aeronave radio controlada.
Se desarrolla un sistema de adquisición de datos para analizar la dinámica de vuelo y se realiza el proceso de diseño de la aeronave, posteriormente se lleva a cabo la simulación del prototipo para su respectivo análisis. No hallan el modelo matemático de la aeronave ya que utilizan herramientas computacionales para analizar el comportamiento de esta.
Se hallara el modelo matemático de la aeronave.
THE EFIGENIA EJ-1B MOZART An S/VTOL Autonomous UAV Unmanned Aircraft Autocontrolled with an Intelligent Adaptive Digital Reconfigurable Guidance, Navigation and Flight Control System
En este trabajo se realiza el análisis, diseño, Modelamiento, implementación y simulación de los sistemas de una aeronave no tripulada de despegue y aterrizaje vertical corto de ala fija y rotatoria.
Se hallara el modelo matemático del avión de ala fija.
Tabla 1. Matriz resumen, estado actual de conocimiento.
2.3. Aportes esperados
Obtener una metodología general para hallar el modelo de la dinámica de vuelo para aeronaves de ala fija.
Generar en la herramienta software, la simulación del modelo de la dinámica de vuelo correspondiente a la aeronave.
Este trabajo permitirá la creación de una nueva línea de investigación en el programa, la cual será la robótica aérea.

3. Hipótesis de solución
La solución propuesta es obtener la metodología para el cálculo del modelo de la dinámica en vuelo de una aeronave de ala fija a partir de teoría aerodinámica y datos obtenidos de la unidad de medida inercial (IMU) y del sistema de posicionamiento global (GPS). Este proyecto de investigación permitirá la obtención de un modelo genérico aplicable al estudio de la dinámica de aeronaves de ala fija.
Para hallar y verificar el modelo de la dinámica en vuelo de la aeronave de ala fija, es necesario conocer información de los movimientos traslacionales y rotacionales, los cuales serán obtenidos por medio de la IMU y el GPS respectivamente.Los movimientos rotacionales corresponden a los giros sobre eje x (roll) eje y (pitch) y giro sobre eje z (yaw). Entre las variables de traslación debidas al movimiento de la aeronave se tienen la posición y rumbo en cada instante.En el desarrollo del proyecto, se hace uso de sistemas hardware para calcular variables de los dos tipos de movimiento, estos sistemas corresponden a la IMU y al GPS. La IMU está constituida por acelerómetros, giroscopios y magnetómetros, los cuales miden aceleraciones lineales, velocidades angulares y la magnitud del campo magnético respectivamente. El GPS permite obtener datos de latitud, longitud, rumbo, velocidad, entre otras. En el presente documento no son mencionados procesos matemáticos que podrían ser útiles en el desarrollo del proyecto, ya que de acuerdo a las necesidades que se vayan presentando se realizará una investigación para cada método, con posibilidades de ser cambiado por otro que se incorpore mejor al proyecto.

4. Justificación
El modelo dinámico de una aeronave de ala fija describe su comportamiento, expresado en formulaciones matemáticas que en su mayoría tienen base fundamentada en teoría de fuerzas y momentos. [4],[12]
El modelo dinámico de la aeronave es necesario para el desarrollo de diversos sistemas de control, simulación para validar modelos, software para simuladores de vuelo y diseño de aeronaves. [5],[7],[8],[13],[18]
En la actualidad existen distintos modelos que describen la dinámica de vuelo para aeronaves de ala fija tripuladas y de tipo UAV.[2],[4],[6],[12],[13]. Estos modelos son calculados para cada avión en particular, de acuerdo a características de diseño y funcionamiento, con lo cual se hace necesario el desarrollo de un modelo dinámico genérico.[4]
El cálculo del modelo de la dinámica en vuelo de una aeronave de ala fija, implica el completo conocimiento de teoría aerodinámica y el empleo de diversos trabajos relacionados con el área.[2],[4]
El tiempo destinado para el cálculo del modelo de la dinámica en vuelo de una aeronave en específico partiendo desde cero, es mayor, en comparación con el modelamiento a partir de una base genérica como modelo matemático. [4]
El crear un modelo dinámico genérico, aumenta el interés hacia el estudio con más profundidad de aeronaves de ala fija, ya que se cuenta con información y datos necesarios para predecir características de vuelo correspondiente a cada avión.[4],[13] De acuerdo a lo anterior, este proyecto contribuirá en el proceso de aprendizaje de los estudiantes de la Corporación Universitaria Autónoma Del Cauca interesados en temáticas que incluyen aeronaves de ala fija, como sistemas de control, estudio detallado de la dinámica de vuelo para un avión en específico, simuladores de vuelo, entre otras.

5. Objetivos
5.1. General
Definir una metodología para el modelamiento de la dinámica en vuelo para aeronaves de ala fija, con su respectiva simulación mediante herramientas computacionales.
5.2. Objetivos Específicos
Implementar la instrumentación requerida en la aeronave. Generar un procedimiento para calcular el modelo aproximado de la
dinámica en vuelo de la aeronave. Verificar el modelo de la dinámica en vuelo de la aeronave mediante
herramientas computacionales.
.

6. Metodología, Actividades y Cronograma
6.1. Metodología
La metodología a emplear para el desarrollo del proyecto estará enfocada en las fases y sus respectivas actividades, las cuales serán ejecutadas de forma secuencial:
Fases
1. Estudio de la dinámica de vuelo del avión, e Identificación ycaracterización de la instrumentación requerida en la aeronave.
Actividad 1: Estudio correspondiente a la dinámica de vuelo de la aeronave de ala fija.
Actividad 2: Obtener los sensores apropiados para ser implementados en el avión.
Actividad 3: Caracterización de la unidad de medida inercial IMU. Actividad 4: Caracterización del sistema de posicionamiento global
GPS. Actividad 5: Caracterización modulo transmisión por radiofrecuencia. Actividad 6: Realizar pruebas de funcionamiento de IMU y GPS. Actividad 7: Realizar pruebas de funcionamiento para la transmisión
y recepción de datos.2. Iidentificación del modelo de la dinámica en vuelo correspondiente a
la aeronave de ala fija. Actividad 8: hallar teóricamente el modelo de la dinámica en vuelo
de la aeronave. Actividad 9: obtener información de los sensores para estimar
parámetros desconocidos dentro del modelo de la dinámica en vuelo. Actividad 10: obtener el modelo final, mediante las actividades 8 y 9.
3. Validación del modelo de la dinámica en vuelo de la aeronave. Actividad 11: Definir la herramienta computacional para realizar la
simulación respectiva. Actividad 12: análisis y simulación del modelo de la dinámica en
vuelo de la aeronave.

6.2. Cronograma
El cronograma para la realización del proyecto, esta divido según las actividades a realizar y es descrito en la siguiente tabla:
2013
ACTIVIDADMes1 Mes2 Mes3 Mes4 Mes5 Mes6 Mes7 Mes8 Mes9 Mes10
Actividad 1Actividad 2 Actividad 3 Actividad 4 Actividad 5 Actividad 6 Actividad 7Actividad 8 Actividad 9 Actividad 10 Actividad 11Actividad 12
Tabla 2. Cronograma de actividades.

7. Recursos y Presupuesto
7.1. Recursos humanos
DIRECTOR DEL TRABAJO DE GRADOvalor referencia $ 20.000/horaNúmero de horas semanales 2Duración del trabajo de grado 36 semanasnúmero total de horas 72Costo total director del proyecto $1.440.000
Tabla 3.Director del trabajo de grado
DESARROLLADOR DEL TRABAJO DE GRADO
ESTUDIANTE 1 ESTUDIANTE 2valor referencia $ 20.000/hora $ 20.000/horaNúmero de horas semanales 40 40Duración del trabajo de grado 36 semanas 36 semanasnúmero total de horas 1440 1440Costo total Individual $ 16.000.000 $ 16.000.000Costo total $ 32.000000
Tabla 4. Desarrollador del trabajo de grado

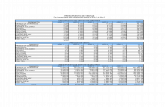
8. Financiación
ITEM CANTIDAD VALOR UNITARIO VALOR TOTAL
Estudiante Universidad
PersonalDirector de Tesis 1 $ 1.440.000 $1.440.000Estudiantes 1 $ 32.000.000 $ 32.000.000
SUBTOTAL $ 33.590.000
PAGOS DE SERVICIOS EXTERNOSpresupuesto aproximado de envíos externos
1 $ 50.000 $ 50.000
SUBTOTAL $ 50.000EQUIPOS LABORATORIO Y CAMPOProtoboard wish 1 $ 79.500 $ 79.500
SUBTOTAL $ 79.500INSUMOS LABORATORIO Y CAMPOIMU ARDUIMU 9 ejes V2
1 $ 120.000 $ 120.000
GPS Trimble Copernicus II DIP Module
1 $162.000 $162.000
Arduino Leonardo withHeaders
1 $54.000 $54.000
Arduino xbee shield
1 $ 45.000 $45.000
XBee Pro 63mW Wire Antenna - Series 2B (ZigBee Mesh)
2 $90.000 $180.000
Antenna GPS 3V Magnetic Mount SMA
1 $30.000 $30.000
Xbee USB Explorer
1 $52.000 $52.000
SUBTOTAL $ 643.000IMPRESOS Y PUBLICACIONES Impresiones 1 $70.000 $70.000
SUBTOTAL $ 70.000TOTAL PROYECTO $ 34.432.500
Tabla 5. Financiación

El sistema hardware de adquisición de datos necesario para el desarrollo del proyecto, es financiado por los estudiantes a cargo. Dicho hardware corresponde a los siguientes elementos electrónicos:
Unidad de medida inercial 9 grados de libertad (IMU) Sistema de Posicionamiento Global (GPS) con su respectiva antena
receptora. Tarjeta de desarrollo Arduino Leonardo. Módulos de comunicación XBEE con sus respectivos shield. Fuente de alimentación externa empleada en la aviónica de la aeronave.
La aeronave empleada para la realización del proyecto, es facilitada por su director, Ing. Mario Andrés Córdoba, quien es la persona encargada de realizar y conducir los vuelos de prueba para la toma de datos pertinentes. El aeromodelo candidato a utilizar es un Cessna 162. Las herramientas software a utilizar en el proyecto, no son definidas en este documento, ya que su uso es realizado en fases posteriores y durante el desarrollo se podrían conocer nuevas herramientas que se adapten mejor al proyecto.
9. Condiciones de Entrega Monografía Metodología para el cálculo de la dinámica en vuelo de aeronaves de ala
fija. Guía de manejo y prácticas en la herramienta computacional. Simulación del modelo de la dinámica en vuelo de la aeronave en
herramienta software. Publicación
Observación: Los dispositivos electrónicos, la aeronave y demás elementos empleados en el proyecto, no harán parte de las condiciones de entrega, por lo tanto no quedaran en propiedad de la Corporación Universitaria Autónoma Del Cauca.

10. Referencias Bibliográficas
[1] A. C. A. HOFFMAN, «CONTROL DIFUSO DE VEHÍCULO VOLADOR NO TRIPULADO,» 2000. [En línea]. Available: http://web.ing.puc.cl/~aabuslem/iee/files/Control%20Difuso%20de%20Vehiculo%20Volador%20no%20Tripulado.pdf. [Último acceso: 13 Febrero 2013].
[2 ] H. V. Ruiz, «Sistema de Control y Navegación para MAV,» 10 Junio 2010. [En línea]. Available: http://upcommons.upc.edu/handle/2099.1/9641. [Último acceso: 12 Febrero 2013].
[3] J. M. B. Asián, «Identificación de UAVs de ala fija y rotatoria,» Marzo 2011. [En línea]. Available: http://bibing.us.es/proyectos/abreproy/60087. [Último acceso: 13 Febrero 2013].
[4] L. B. G. Z. Paula A. Ortiz Valencia, «Modelo matemático para un vehículo aéreo no tripulado de ala fija, usando un estimador de parámetros “filtro de kalman”,» 2009. [En línea]. Available: http://itmojs.itm.edu.co/index.php/tecnologicas/article/view/266. [Último acceso: 12 Enero 2013].
[5] E. M. C. A. Pedro J. Boschetti, «CALCULO DE LAS CARACTERISTICAS AERODINÁMICAS DE UN AVIÓN NO TRIPULADO EMPLEANDO EL MÉTODO DE LOS PANELES,» 2011. [En línea]. Available: prof.usb.ve/pboschetti/ance/publicaciones/cimenics043.pdf. [Último acceso: 5 Febrero 2013].
[6] D. O. Val, «Modelo dinamico de una aeronave con tres grados de libertad,» Marzo 2012. [En línea]. Available: zaguan.unizar.es/TAZ/EINA/2012/6996/TAZ-PFC-2012-150.pdf. [Último acceso: 10 02 2013].
[7] P. S. G. H. A. A. L. Eduardo N. Zapicoa, «MODELOS DE DINÁMICA DEL VUELO Y AERODINÁMICO DE AERONAVES PARA UN SIMULADOR DE VUELO 6-DOF EN TIEMPO REAL,» Mecánica Computacional, vol. XXVIII, pp. 2995-3005, 2009.
[8] O. R. G. C. H. R. C. Sergio A. Araujo-Estrada, «Estimacion de las reacciones aerodinamicas de una miniaeronave de ala fija utilizando Inmersion e Invarianza,» [En línea]. Available: http://www.pdfdownload.org/pdf2html/view_online.php?url=http%3A%2F%2Frevistascientificas.cujae.edu.cu%2FRevistas%2FMecanica%2FVol-11%2F2-2008%2F03_2008_02_13_20.pdf. [Último acceso: 8 Febrero 2013].
[9] L. M. P. B. M. E. M. C. D. D. Á. R. L. H. S. Boris L. Martínez Jiménez, «Identificación de un vehículo aéreo no tripulado,» Revista de ingenieria electronica automatica y comunicaciones(RIELAC), vol. XXXIII, pp. 45-55, 2012.

[10] U. d. c.-L. mancha, «Tema 6: La fuerza de sustentacion,» [En línea]. Available: http://www.pdfdownload.org/pdf2html/view_online.php?url=http%3A%2F%2Fwww.uclm.es%2Fprofesorado%2Fxaguado%2FASIGNATURAS%2FBTD%2F4-Apuntes%2F06.pdf. [Último acceso: 8 Febrero 2013].
[11] «TEMA 6: LA SEGUNDA GUERRA MUNDIAL,» [En línea]. Available: 193.146.228.22/ga/historia/Tema6_laIIguerra.pdf. [Último acceso: 14 Enero 2013].
[12] I. v. a. organization(IVAO), «Estructuras principales del avion,» [En línea]. Available: www.ivao.es/uploads/8697689eec233abb95cd0b31ab6e8dec.pdf. [Último acceso: 13 Enero 2013].
[13] L. A. R.Cabrera Pedroso, «Obtención de modelo matemático para el desarrollo del perfil del ala de una aeronave,» 22 Septiembre 2007. [En línea]. Available: http://www.pdfdownload.org/pdf2html/pdf2html.php?url=http%3A%2F%2Frevistascientificas.cujae.edu.cu%2FRevistas%2FMecanica%2FVol-11%2F2-2008%2F03_2008_02_13_20.pdf&images=yes. [Último acceso: 11 Enero 2013].
[14] T. I. FOSSEN, «MATHEMATICAL MODELS FOR CONTROL OF AIRCRAFT AND SATELLITES,» Junio 2011. [En línea]. Available: http://www.itk.ntnu.no/fag/TTK4190/lecture_notes/2012/Aircraft%20Fossen%202011.pdf. [Último acceso: 13 Febrero 2013].
[15] E. R. L. Edgar Ruiz Lizama, «Calculo de los coeficientes aerodinamicos usando matlab,» Industrial data, vol. VIII, nº 001, pp. 58-65, 2005.
[16] R. J. Girish Chowdhary, «Aerodynamic parameter estimation from flight data applying extended and unscented Kalman filter,» 27 Octubre 2009. [En línea]. Available: http://www.sciencedirect.com/science/article/pii/S1270963809000650. [Último acceso: 3 Febrero 2013].
[17] D. L. Martin Gonzales, «Modelo matematico y construccion del motoplaneador a escala, DAX-01,» Septiembre 2010. [En línea]. Available: http://www.pdfdownload.org/pdf2html/pdf2html.php?url=http%3A%2F%2Fwww.efn.unc.edu.ar%2Fdepartamentos%2Faero%2FInvyDesa%2FDocumentos%2FDAX_01.pdf&images=yes. [Último acceso: 3 Febrero 2013].
[18]E. M. P. R. Emilio E. Dufeu Delarze, «ANÁLISIS NUMERICO DE LA ESTABILIDAD Y CONTROL DE UNA AERONAVE NO TRIPULADA,» Mecánica Computacional, vol. XXII, 2003.
[19]E. Sofyan, «reocities,» Septiembre 1996. [En línea]. Available:

http://www.reocities.com/ResearchTriangle/Thinktank/4100/identification.PDF. [Último acceso: 16 Febrero 2013].
[20] F. Aparicio Urbano Molano, «researchgate,» Octubre 2011. [En línea]. Available: http://www.researchgate.net/publication/228058615_Dinmica_de_vuelo_y_simulacin_de_los_parmetros_de_diseo_de_una_aeronave_radiocontrolada?ev=prf_pub. [Último acceso: 16 Febrero 2013].
[21] M. A. Cordoba, «Compelect,» 12 Noviembre 2010. [En línea]. Available: http://www.compelect.com.co/archivos/diamatlab/2006/pdf/THE%20EFIGENIA%20EJ-1B%20MOZART.pdf. [Último acceso: 16 Febrero 2013].
[22] A. M. M. B. M. J. B. Andrei Dorobantu, «Frequency Domain System Identification for a Small, Low-Cost, Fixed-Wing UAV,» [En línea]. Available: www.aem.umn.edu/.../UltrastickSYSID.pdf. [Último acceso: 13 Enero 2013].
[23]A. E. V. M. David Retana Perz, «Estabilización de un helicóptero a escala mediante sistemas neuro-difusos,» 2012. [En línea]. Available: www.ptolomeo.unam.mx:8080/xmlui/bitstream/.../Completo.pdf. [Último acceso: 14 Febrero 2013].
[24] B. Etkin, DYNAMICS OF FLIGHT Stability and control, Jhon Wiley & Sons, inc, 1996.
[25] «Navegacion Aerea: Conceptos Basicos de navegacion,» [En línea]. Available: http://aero.us.es/na/files1112/T2NA.pdf. [Último acceso: 6 Marzo 2013].
[26] A. Favieri, «Introducción a los Cuaterniones,» 2008. [En línea]. Available: http://www.edutecne.utn.edu.ar/cuaterniones/cuaterniones.pdf. [Último acceso: 6 Marzo 2013].
[27] J. Roskam, Airplane Flight Dynamics And Automatic Flight Controls, Lawrence Kansas: Dar Corporation, 2001.
[28]J. Anderson, Aircraft Performance And Design, Mc Graw-Hill, 1999.