Analisis Entrada Salida de Sistemas en El Tiempo
8
TEORIA DE CONTROL Francisco Andrade Rojas. Tercer año ESCUELA DE INGENIERIA ELECTRICA FACULTAD DE INGENIERIA UNIVERSIDAD DE CUENCA ANALISIS ENTRADA - SALIDA DE SISTEMAS EN EL TIEMPO GENERALIDADES. Si la entrada y salida de un sistema cambian en cualquier instante, se dice que el sistema es de tiempo continuo. La entrada x(t) y la salida y(t) son funciones de la variable de tiempo continuo t. Debe notarse que la entrada y la salida no tienen que ser en sí mismas funciones contínuas. Los sistemas con parámetros que varían con el tiempo se llaman sistemas variables en el tiempo. Estos, generalmente se modelan mediante ecuaciones diferenciales o de diferencias lineales con coeficientes que varían en el tiempo. Si la salida para cualquier tiempo t depende solo de la entrada en el mismo tiempo, el sistema se llama sin memoria. Si la salida en el tiempo t depende de los valores de la entrada correspondientes a cierto intervalo (t-T,t) entonces el sistema tiene memoria de longitud T. SOLUCION DE ECUACIONES DIFERENCIALES LINEALES EN EL DOMINIO DEL TIEMPO.
-
Upload
juan-sebastian-munoz-andrade -
Category
Documents
-
view
214 -
download
0
description
Trabajo de Sistemas lineales.
Transcript of Analisis Entrada Salida de Sistemas en El Tiempo

TEORIA DE CONTROL
Francisco Andrade Rojas.
Tercer año
ESCUELA DE INGENIERIA ELECTRICA
FACULTAD DE INGENIERIA
UNIVERSIDAD DE CUENCA
ANALISIS ENTRADA - SALIDA DE SISTEMAS EN EL TIEMPO
GENERALIDADES.
Si la entrada y salida de un sistema cambian en cualquier instante, se dice que el
sistema es de tiempo continuo. La entrada x(t) y la salida y(t) son funciones de la variable de
tiempo continuo t. Debe notarse que la entrada y la salida no tienen que ser en sí mismas
funciones contínuas.
Los sistemas con parámetros que varían con el tiempo se llaman sistemas variables en
el tiempo. Estos, generalmente se modelan mediante ecuaciones diferenciales o de diferencias
lineales con coeficientes que varían en el tiempo.
Si la salida para cualquier tiempo t depende solo de la entrada en el mismo tiempo, el
sistema se llama sin memoria. Si la salida en el tiempo t depende de los valores de la entrada
correspondientes a cierto intervalo (t-T,t) entonces el sistema tiene memoria de longitud T.
SOLUCION DE ECUACIONES DIFERENCIALES LINEALES EN EL
DOMINIO DEL TIEMPO.
Una ecuación diferencial lineal ordinaria con coeficientes constantes es característica de
los sistemas concentrados lineales invariables en el tiempo.
Suponga que la ecuación diferencial es de orden n
)()(....)()(
01
1
1 txtybdt
tydb
dt
tydb
n
n
nn
n
n
en forma más resumida como
L[y] = x(t)
siendo L un operador lineal.
La solución de ésta ecuación diferencial tiene dos componentes:
1) la solución (transitoria , natural , complementaria , homogénea) de fuente libre o de entrada
cero, y

2) la componente resultante de la fuente (forzada, de estado-estable , no homogénea, solución
particular) o de estado cero.
La solución transitoria yc(t) se obtiene de la ecuación homogénea anterior; es decir, yc(t)
debe satisfacer:
L[yc(t)] = 0
Para el caso especial de coeficientes constantes , se tiene la solución de ésta ecuación en
la forma:
yc(t) = C1 y1(t) + C2 y2(t) + ….. + Cn yn(t)
Las funciones y1(t) , y2(t) , ……, yn(t) dependen de las raíces de la ecuación
característica asociada,
f(r) = bnrn + bn-1rn-1 + ……… + b0 = 0
en donde bn…,….. b0 son los mismos coeficientes que en la ecuación diferencial inicial. Si ésta
tiene n raíces distintas r1, r2…, rn, las funciones yi(t) , i = 1,2,…,n son yi(t) = erit y la solución
transitoria o complementaria es:
trn
trtrc
neCeCeCty .........)( 2121
Dependiendo de la multiplicidad de las raíces , las funciones yi(t) toman diversas
formas. Después de encontrar las n raíces de la ecuación característica , se asignan las y i(t) , i =
1.2…..,n como sigue:
1) para cada raíz real r , la función ert .
2) para cada raíz real r de multiplicidad k , las funciones ert , t ert ,…….,tk-1 ert .
3) para cada par complejo simple de raíces a±jb , las funciones eat Cosbt y eat Senbt.
4) para cada par complejo de raíces a±jb de multiplicidad k , las funciones eat Cosbt , eat Senbt,
t eat Cosbt ,t eat Senbt, ……, tk-1 eat Cosbt , tk-1 eat Senbt.
Las constantes Ci , i = 1,2,……,n se determinan de las condiciones iniciales o de
frontera del problema.
La solución resultante de la respuesta forzada es un poco más complicada. Existen
varios métodos para la obtención de yp(t) incluyendo el de suposición argumentada. Se puede
emplear el método de coeficientes indeterminados , si las derivadas de x(t) dan por resultado un
número finito de funciones independientes. A continuación describiremos brevemente el
método de coeficientes indeterminados.
Sea Dº d/dt con lo que el operador L se puede expresar como
L = bnDn + bn-1Dn-1 + ……… + b0 = 0
es decir, como operador polinomial en el operador D. Se desea encontrar un operador que
“anule” x(t) . Es decir, dado x(t), se desea encontrar un operador LA tal que
LA [x(t)] = 0
Tal operador siempre se puede encontrar si x(t) es solución de una ecuación homogénea con
coeficientes constantes. Por ejemplo, si x(t) = eat , entonces el operador anulador es LA = D - a.

Si x(t) = Acosbt+Bsenbt , entonces el operador anulador es LA = D2+ b2. Para una suma de tales
términos , el operador anulador es el producto de los operadores de cada sumando.
Una vez que se ha encontrado el operador anulador se aplica a ambos miembros de la
ecuación no homogénea original para obtener una ecuación homogénea. Esto es , suponga que
LA es el anulador para x(t) y que se desea resolver
L[y(t)] = x(t)
entonces:
LA {L[y(t)]} = LA [x(t)] = 0
en donde ésta ecuación puede resolverse empleando el método expuesto anteriormente.
Así , la solución es:
)(...)()(.........)()()( 112211 tyCtyCtyCtyCtyCty prprppnn
Las primeras n funciones solución satisfacen L[y(t)] = 0. Por tanto , si se sustituye y(t) en ésta
ecuación , éstos términos sumarán cero y los únicos términos del segundo miembro serán los
que provienen de la función de excitación. Si ahora se igualan coeficientes de términos
semejantes en ambos miembros de la ecuación , es posible determinar las constantes Cp1, ……
Cpr, y así obtener la solución forzada.
La respuesta total del sistema y(t) está formada de dos componentes. La solución de
fuente libre o transitoria, se obtiene con un estímulo de entrada igual a cero y por tanto , solo
depende del carácter del sistema y no de señales externas. Esta solución se conoce como
respuesta natural del sistema , debido a que ocurre para x(t) = 0. Los términos de fuente libre ,
transitoria, natural , homogénea y complementaria se emplean para describir ésta respuesta que
depende únicamente del carácter del sistema.
Por el contrario , la solución forzada es característica tanto del sistema como del
estímulo de estrada. Si el sistema o la entrada varían, cambia la respuesta forzada. La respuesta
forzada también se conoce como respuesta en estado estable debido a que es una respuesta
dirigida que puede existir después de desaparecer la respuesta transitoria.
ALMACENAMIENTO DE ENERGIA INICIAL EN SISTEMAS LINEALES.
Para el análisis de sistemas lineales , existe otra forma útil de descomponer la respuesta
total. Esta descomposición implica separar la respuesta provocada por la energía inicial
almacenada de la respuesta debida a la entrada del sistema. Al separar la energía inicial
almacenada del resto de la respuesta, se tiene una forma más sencilla de manejar e interpretar el
almacenamiento de energía en un sistema.
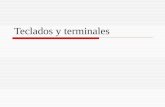
En la descomposición mostrada en la figura 1 cada uno de los sistemas marcados con H
es igual al sistema dado en la parte superior de la figura.

HX(T) Y 1(T)
H
H
X(T)
X(T)=0
Y d(T)
Y h(T)
Y 2(T)
(fig. 1)
Escribiremos la salida y2(t) del sistema como la suma de yd(t) , salida de un sistema
inicialmente en reposo alimentado con la entrada x(t) , más yh(t), salida de un sistema no
forzado con condiciones iniciales idénticas a las del dado.
Entonces tenemos
y2(t) = yd(t) + yh(t)
donde
L[yd(t)] = 0
con yh(0)= y1(0); y`h(0) = y`1(0); ………
De éste modo y1(0); y`1(0); ……… yn-11(0) son las condiciones iniciales dadas para el sistema.
VARIABLES DE ESTADO
La descripción con variable de estado se relaciona con el sistema considerado como un
todo. Por lo tanto , se toman en cuenta tanto las variables internas del sistema como las
variables de entrada - salida.
En general, el estado de un sistema en el tiempo t es el conjunto mínimo de variables
necesarias en el tiempo t para que, dadas las entradas del sistema para t > t , se pueda
especificar con exactitud el comportamiento futuro del sistema para t > t.
Considérese un sistema con una sola entrada y una sola salida representado por la
ecuación diferencial
)()(....)()(
001
1
1 tuatybdt
tydb
dt
tydb
n
n
nn
n
n
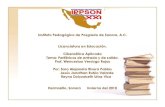
Para poner éste sistema en forma de variable de estado primero se hace un dibujo de
diagrama a bloques. En el caso de sistemas de tiempo continuo se emplean integradores como
elemento básico del diagrama de bloques. En la figura 2 se muestra una representación en
diagrama de bloques de la ecuación anterior. Los integradores de la figura 2 corresponden a los
elemento de retardo de sistemas de tiempo discreto.

a0
b n-1
b n-2
b 0
u(t)...
y(t)y (n) (t) y (n-1) (t) y (n-2) (t)
+
- --
(fig. 2)
Para poder calcular la salida y(t) debida a la entrada u(t) , es necesario saber los valores
iniciales asociados a cada integrador , ya que éstos valores se pueden especificar
independientemente de la entrada. En otras palabras , las salidas iniciales del integrador se
consideran como la memoria del sistema: así, se definen las variables de estado como las
salidas
de éstas unidades de memoria. Las componentes del vector de estado x(t) se definen como:
)()()(
)()()(
)()(
11
12
1
txtytx
txtytx
tytx
nn
n
entonces se puede escribir
)()()( tButAxtx donde x es un vector y A,B son matrices.
La ecuación de estado de un sistema de tiempo continuo expresa la derivada con
respecto al tiempo del vector de estado en función del vector de estado y de la entrada ,
mientras que la ecuación de estado de un sistema de tiempo discreto expresa el estado en un
instante dado en términos del estado en un instante anterior y de la entrada.
Se puede expresar la salida y(t) en términos del estado x(t) y de la entrada u(t) como:
)()()( tDutCxty donde y es un vector y C,D son matrices.
Se pueden tratar múltiples entradas y múltiples salidas con las mismas fórmulas. Para n
estados, r entradas y s salidas , la matriz A tiene dimensiones n x n ,la B n x r , la C s x n, la D
s x r.
Las variables de estado se pueden interpretar como las “celdas de memoria” del
sistema. Para sistemas de tiempo continuo éstas celdas de memoria se pueden elegir, de modo
que correspondan a las componentes físicas de almacenamiento de energía dentro del sistema.
Para los sistemas eléctricos, éstos dispositivos de almacenamiento de energía son los
capacitores y los inductores.
OBSERVABILIDAD Y CONTROLABILIDAD.
Suponiendo que la matriz A del sistema tenga distintos eigenvalores y que la base de
coordenada se elija de tal manera que se tenga la representación con variable de estado en forma

normal, se puede determinar con facilidad la observabilidad y controlabilidad con solo
examinar las matrices B y C . Si B y C solo tienen filas y columnas diferentes de cero ,
respectivamente, entonces el sistema es controlable y observable respectivamente.