ACCIONES DE CONTROL: P, I, D - Tablero al Parque...
41
ACCIONES DE CONTROL: P, I, D EFECTOS SOBRE EL PORCESO
Transcript of ACCIONES DE CONTROL: P, I, D - Tablero al Parque...

ACCIONES DE CONTROL: P, I, D
EFECTOS SOBRE EL PORCESO

TRABAJAREMOS SOBRE EL SIGUIENTE EJEMPLO
Hablaremos del control de la temperatura dellíquido que sale.

CONTROL DE DOS POSICIONES (On-Off)
SUPONGAMOS QUE QUEREMOS MANTENER LATEMPERATURA DE SALIDA EN 100°C



ACCIÓN PROPORCIONALEFECTOS SOBRE EL SISTEMA, VENTAJAS Y DESVENTAJAS

EXAMINEMOS EL SIGUIENTE SISTEMA
G(s)=1
𝑠3+3𝑠2+3𝑠+1

EN LAZO CERRADO
G(s)=1
𝑠3+3𝑠2+3𝑠+1H(s)=1

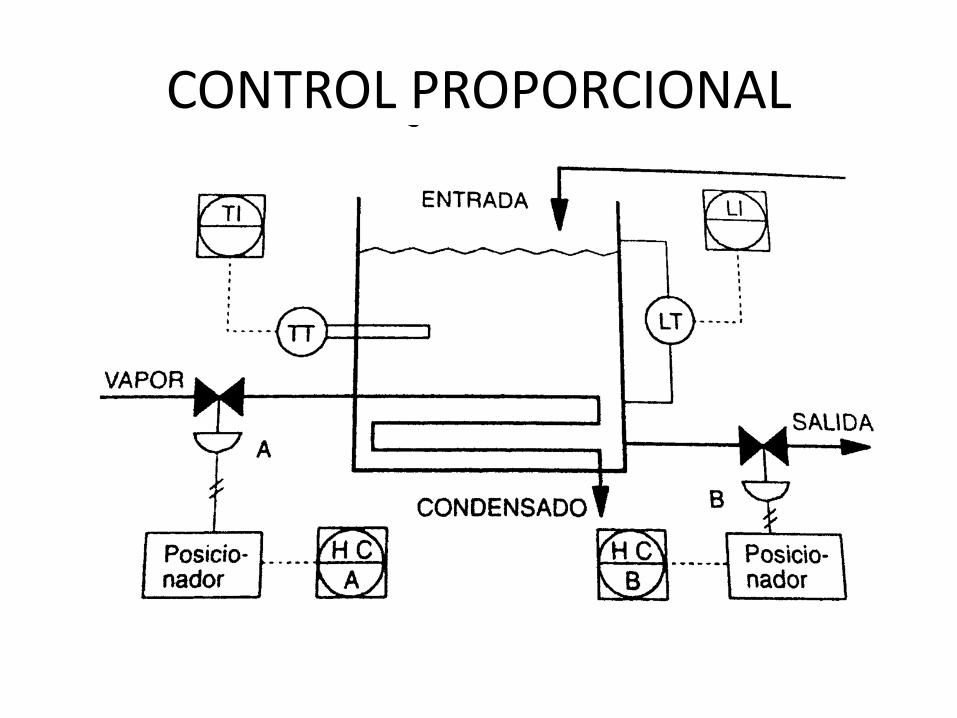
CONTROL PROPORCIONAL

RELACION UNO A UNO
Al aumentar el caudal disminuye la temperatura
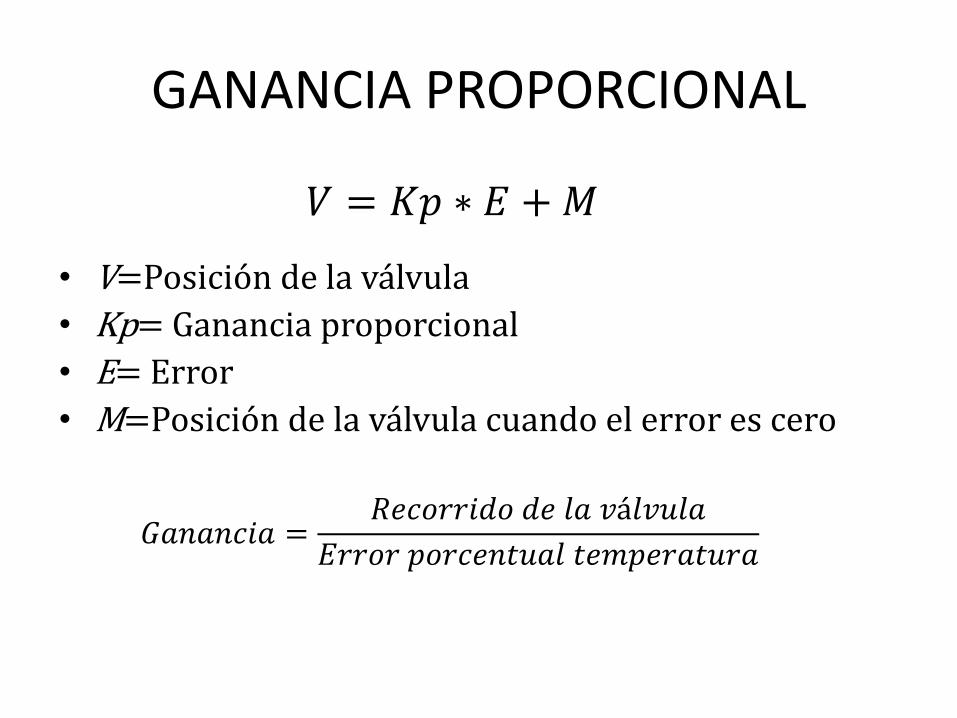
GANANCIA PROPORCIONAL
• V=Posición de la válvula
• Kp= Ganancia proporcional
• E= Error
• M=Posición de la válvula cuando el error es cero
𝑉 = 𝐾𝑝 ∗ 𝐸 +𝑀
𝐺𝑎𝑛𝑎𝑛𝑐𝑖𝑎 =𝑅𝑒𝑐𝑜𝑟𝑟𝑖𝑑𝑜 𝑑𝑒 𝑙𝑎 𝑣á𝑙𝑣𝑢𝑙𝑎
𝐸𝑟𝑟𝑜𝑟 𝑝𝑜𝑟𝑐𝑒𝑛𝑡𝑢𝑎𝑙 𝑡𝑒𝑚𝑝𝑒𝑟𝑎𝑡𝑢𝑟𝑎

RELACION UNO A UNO
GANACIA=1

RELACION MENOR A UNO
GANACIA=0,5

RELACION MAYOR A UNO
GANACIA=2
Bp= banda proporcional= Cambio necesarioen la variable del proceso para que la válvularealice su recorrido total
M= Reset manual o Reajuste manual=Posición de a válvula en la cual se suministrael vapor necesario para que la temperaturapermanezca en 100°C (error 0%)
𝐾𝑝 = 100/ B𝑝

DESVIACIÓN PERMANENTESupongamos que la temperatura de entrada es 20°C y ala salida queremos 100°C. El rango del controlador es de0°C a 200°C y la ganancia es de 2. La válvula tiene unacaracterística lineal y a plena apertura deja pasar8000kcal/h
𝑄 = 𝐾𝑝 ∗ 𝑇𝑠 +𝑀
RECTA DE CONTROL

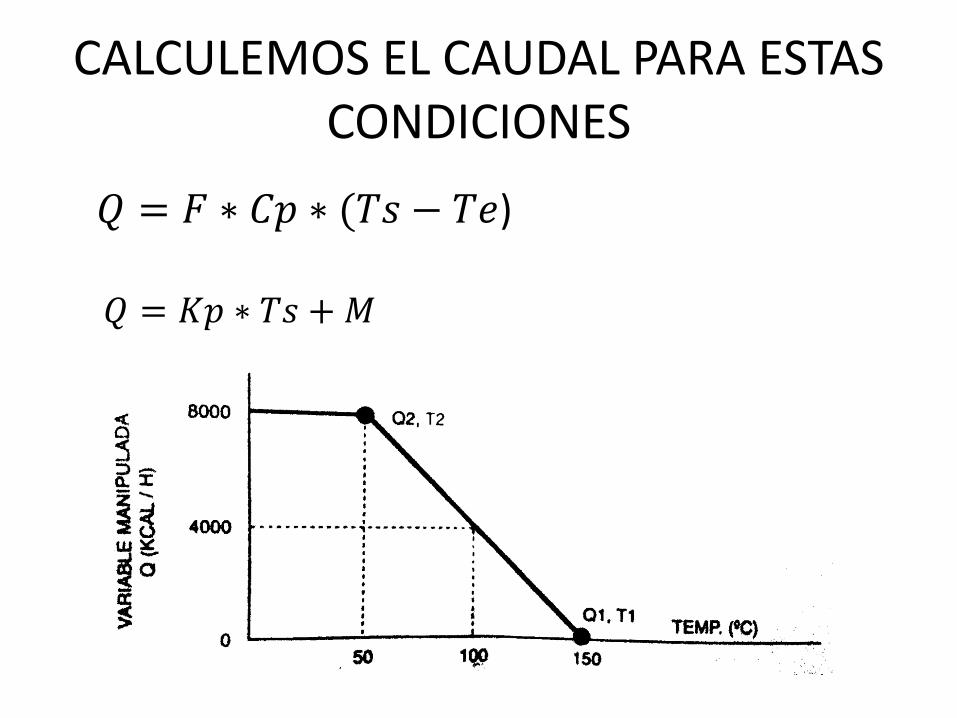
CALCULEMOS EL CAUDAL PARA ESTAS CONDICIONES
Q= Cantidad de calor (kcal/h)
F=Caudal de agua(m3/h)
Cp= Calor específico del agua= 1kcal/m3°C
Ts= Temperatura de salida del agua °C
Te= Temperatura de entrada del agua °C
𝑄 = 𝐹 ∗ 𝐶𝑝 ∗ (𝑇𝑠 − 𝑇𝑒)
CALCULEMOS EL CAUDAL PARA ESTAS CONDICIONES
𝑄 = 𝐹 ∗ 𝐶𝑝 ∗ (𝑇𝑠 − 𝑇𝑒)
𝑄 = 𝐾𝑝 ∗ 𝑇𝑠 + 𝑀

RECTA DE CONTROL
𝑄 = −80 ∗ 𝑇𝑠 + 12000
𝐾𝑝 =𝑄2 − 𝑄1
𝑇2 − 𝑇1= 80

AHORA SUPONGA QUE EL CUADAL CAMBIA A 60 m3/h
Calcule las nuevas condiciones en estado estable
EJERCICIO: REPITA EL MISMO EJEMPLO SI LA GANANCIA DEL SISTEMA ES 0.5


ACION DE CONTROL PROPORCIONAL

CONTROL PROPORCIONAL CON ACCIÓN INTEGRAL
𝑉 = 𝐾𝑖 ∗ න0
𝑡
𝐸 𝑑𝑡
«Ajustar M de forma automática»
𝑉 = 𝐾𝑝 ∗ 𝐸 +1
𝑇𝑖0𝑡𝐸 𝑑𝑡 +M
𝑑𝑉
𝑑𝑡= 𝐾𝑖 ∗ 𝐸
¿Cómo?
Mover la válvula con una velocidad
proporcional al error
𝐾𝑖 =𝐾𝑝
𝑇𝑖𝐾𝑝= Ganancia proporcional𝑇𝑖 = 𝑇𝑖𝑒𝑚𝑝𝑜 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑙

DIMENSIONAMIENTO DE LA ACCIÓN INTEGRAL

COMPORTAMIENTO DE LA ACCIÓN INTEGRAL

PI

PI

INTEGRAL WINDUP
• LA SATURACIÓN DEL ACTUADOR ES UNA NO-LINEALIDAD IMPORTANTE QUE DEBETENERSE EN CUENTA
• CUANDO EL ACTUADOR LLEGA A SU LÍMITE, EL BUCLE DE CONTROL CORRE ENLAZO ABIERTO,PORQUE LA RESPUESTA DEL ACTUADOR ES LA MISMA, SINIMPORTAR LA SALIDA DEL PROCESO
• PARA UN CONTROALDOR CON ACCION INTEGRAL, ESTO PUEDE HACER QUE LAACCION INTEGRAL CREZCA MUCHO. CUANDO ESTO SUCEDE, EL ERROR DEBECAMBIAR DE SIGNO POR UN PERIDO MUY LARGO ANTES DEL QUE LA ACCIÓNINTEGRAL VUELVA A BAJAR


ANTI WINDUP
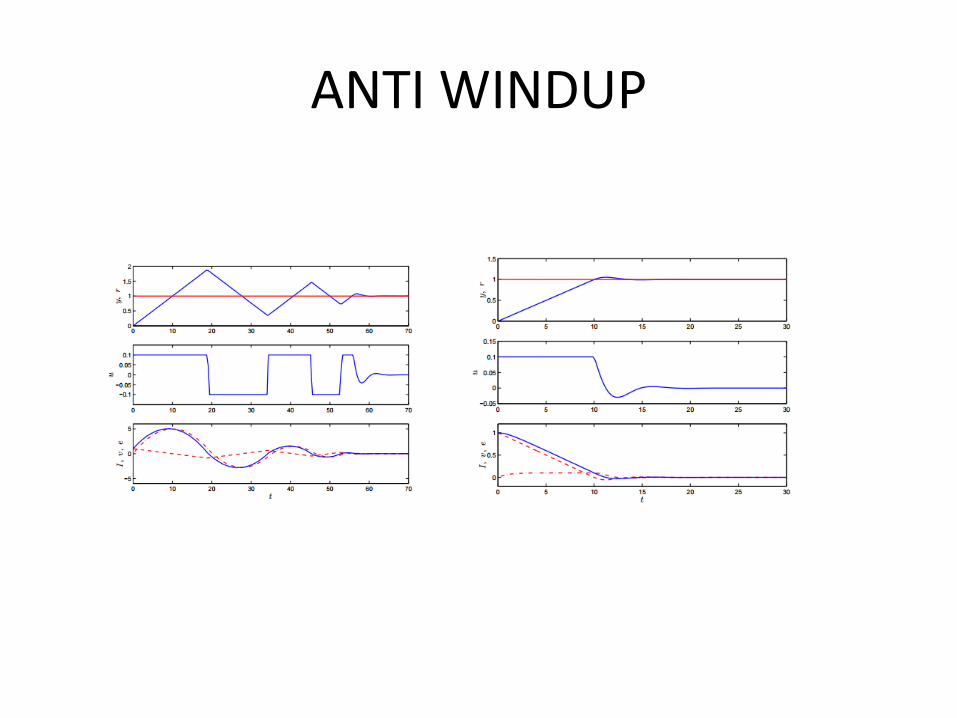
ANTI WINDUP
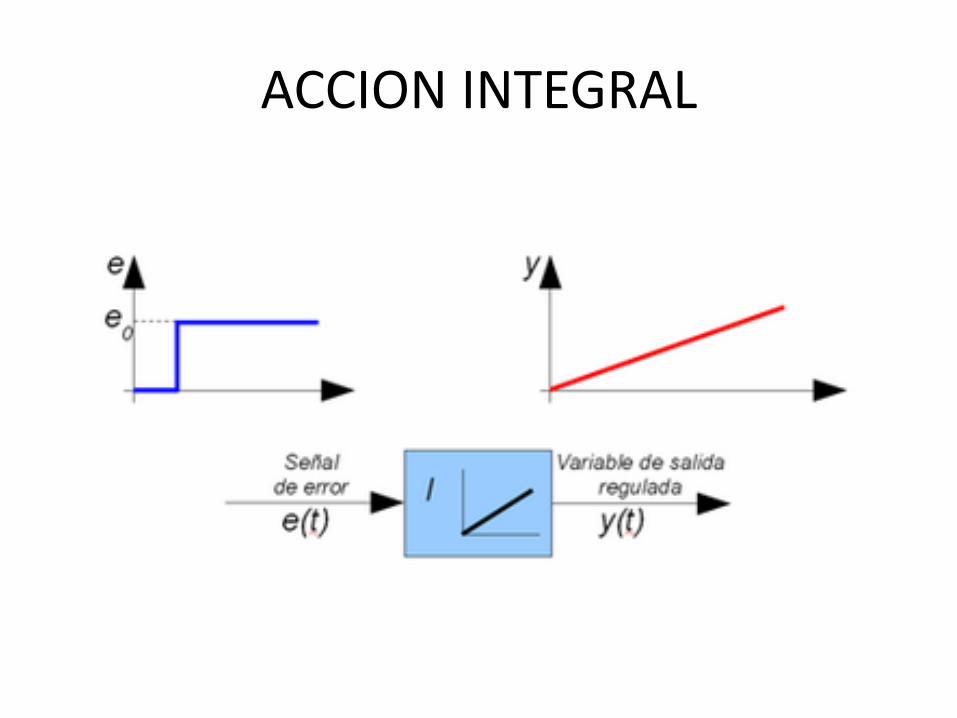
ACCION INTEGRAL

CONRTOLADOR PI

ACCION DERIVATIVA

DIMESIONAMIETO DE LA ACCION DERIVATIVA
𝑉 = 𝐾𝑝 ∗ 𝐸 + 𝑇𝑑 ∗𝑑𝐸
𝑑𝑡+M
𝑉 = 𝐾𝑑 ∗𝑑𝐸
𝑑𝑡
𝐾𝑑 = 𝐾𝑝 ∗ 𝑇𝑑
𝐾𝑝= Ganancia proporcional𝑇𝑖 = 𝑇𝑖𝑒𝑚𝑝𝑜 𝑖𝑛𝑡𝑒𝑔𝑟𝑎𝑙

COMPRTAMIENTO DE LA ACCIÓN DERIVATIVA

COMPORTAMIENTO DE LA ACCIÓN DERAVATIVA
Se adelanta un tiempo Td a la acción proporcional sola
Línea punteada, controlador PD, línea continua controlador P

PID
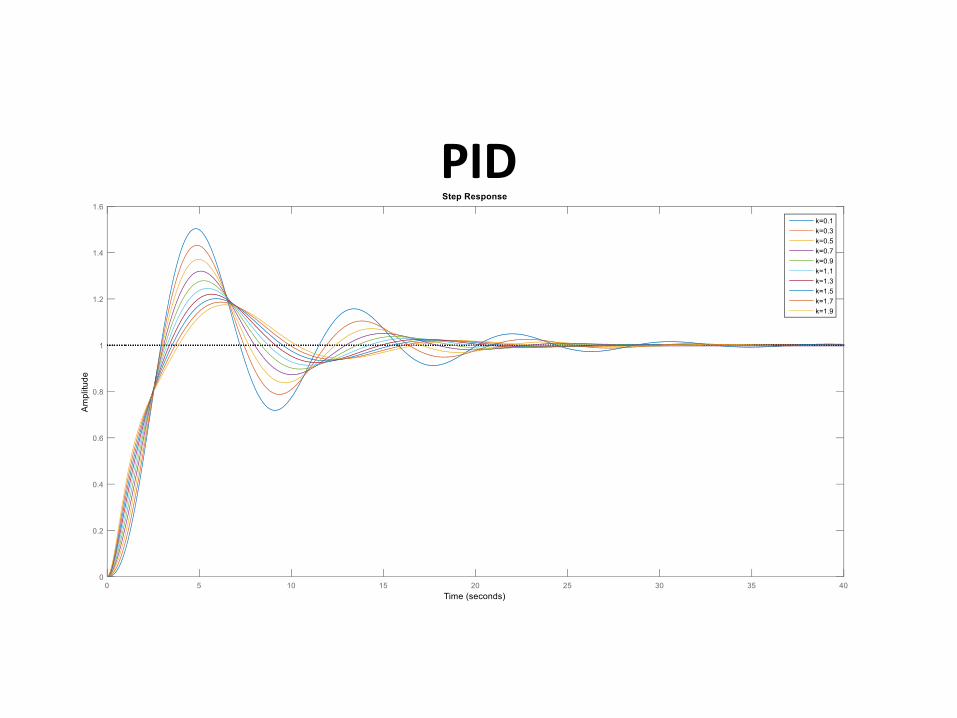
PID