accionamiento_de_motores__4_
25
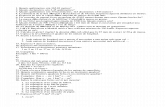
Partida directa Una de las características del motor de inducción cuando se conecta directamente a su tensión nominal es su elevado par de arranque, que es típicamente de 2 a 2,5 veces el par de plena carga (nominal). La contrapartida de este elevado par de arranque es doble: por una parte, el valor efica de la corriente de arranque directo (!ad) que el motor absorbe de la red es mu" elevado (de 5 a # veces la corriente nominal (!n), por otra parte su factor de potencia es mu" ba$o (típicamente %.2 a %.&) Máquinas eléctricas “Accionamiento de motores” n ad I 800% I = n I n (rpm) n n (A) I n V t (s) (v) V : Voltaje de partida 100 % Vn : Corriente de partida Típicamente 500 !00% "n# depende de $iseo de Motor ad I n V
-
Upload
belfor-luis-vilca-lecaros -
Category
Documents
-
view
5 -
download
0
description
Maquinas Electricas
Transcript of accionamiento_de_motores__4_
-
Partida directa Una de las caractersticas del motor de induccin cuando se conecta directamente a su tensin nominal es su elevado par de arranque, que es tpicamente de 2 a 2,5 veces el par de plena carga (nominal). La contrapartida de este elevado par de arranque es doble: por una parte, el valor eficaz de la corriente de arranque directo (Iad) que el motor absorbe de la red es muy elevado (de 5 a 8 veces la corriente nominal (In), por otra parte su factor de potencia es muy bajo (tpicamente 0.2 a 0.3)n (rpm)t (s): Voltaje de partida 100 % Vn: Corriente de partida Tpicamente 500 -800% In, depende de Diseo de Motor
-
Las caractersticas de arranque directo del motor de induccin pueden ocasionar perturbaciones inadmisibles en el funcionamiento global de la red. Imaginemos una red de distribucin constituida por varios usuarios. En funcionamiento normal, la corriente total consumida, de 10 A, con un factor de potencia de 0.8, produce una cada de tensin en la impedancia de cortocircuito del transformador de un 3%, perfectamente admisible. Pero en el momento de arrancar el motor asncrono se arranca por conexin directa a la red, la corriente total en el momento inmediatamente posterior a la conexin pasa a ser de 57.8 A con un factor de potencia de 0.31. En estas condiciones la cada de tensin en el transformador pasa a ser del 13.1 %, de modo que en el punto comn de conexin con los restantes consumidores se ha reducido a 86.9%I
-
Mtodos de arranque a tensin reducidaDado que la impedancia del motor en el momento del arranque viene determinada exclusivamente por la impedancia de rotor bloqueado, ya que en ese instante el deslizamiento vale la unidad (velocidad del motor n=0), se puede reducir la corriente de arranque disminuyendo la tensin de alimentacin. La otra posibilidad es aumentar la impedancia que presenta el motor con el rotor bloqueado.
-
Partida con autotransformadorEste mtodo, que define la filosofa del arranque a tensin reducida, consiste en intercalar un autotransformador reductor entre la red de alimentacin y el motor durante el proceso de arranque. Una vez acelerado el motor, el autotransformador se eliminar y el motor queda conectado directamente a la red. El nivel de tensin a la partida est regulado por el nmero de vueltas del secundario. La tensin del primario debe ser la de la red.
-
La secuencia de maniobras es la siguiente. Inicialmente se cierra el contactor principal CP, el contactor C que forma el neutro del autotransformador y el contactor B. El motor arranca a tensin reducida hasta alcanzar una velocidad relativamente prxima a la nominal. En ese momento, que se determina por un rel de temporizacin, se abre el contactor C, quedando el motor alimentado de la red a travs de la reactancia de dispersin de las espiras no comunes del autotransformador. Un instante despus se cierra el contactor A y se abre B, quedando definitivamente el motor conectado a plena tensin de red. De esta forma se reduce el transitorio electromagntico que se producira entre la apertura de C y el cierre de A, en donde el motor quedara durante unos instantes sin alimentacin.MotorCPCPCPCCCBBBAAAMotorCPCPCPCCCBBBAAAMotorCPCPCPCCCBBBAAARedRedRedPaso 1Paso 2Paso 3Motor alimentado por el secundario del transformadorMotor alimentado por las reactancias de dispersinMotor alimentado por la red trifsica
-
Su principal ventaja es que la tensin y el torque de partida se puede seleccionar en funcin al tap del autotransformador. Las desventajas ms importantes es su alto costo (es necesario un autotransformador con las caractersticas indicadas para el motor de induccin); generalmente, ocupa demasiado espacio, y por la forma, tiene una alta disipacin de calor.Los taps son derivaciones que poseen los transformadores o autotransformadores trifsicos, los cuales hacen que se tenga la posibilidad de poder cambiar la tensin a la salida del transformador
n (rpm)Corriente partida con autotransformador
-
Partida con resistencias primariasEl arranque con resistencia primaria consiste en colocar tres resistores en serie con el motor durante el periodo de arranque. El contactor A se cierra primero y cuando el motor casi ha alcanzado la velocidad sncrona, un segundo contacto B pone en cortocircuito los resistores. Este mtodo produce un arranque muy suave pues no hay ningn choque mecnico. La cada de voltaje a travs de los resistores es alta al principio, pero disminuye gradualmente conforme el motor adquiere velocidad y la corriente se reduce. Por consiguiente, el voltaje a travs de las terminales del motor se incrementa con la velocidad, as que el choque elctrico y mecnico es insignificante cuando se aplica finalmente todo el voltaje (cierre del contactor B). Los resistores se ponen en cortocircuito despus de un lapso que depende del ajuste de un relevador de retraso de tiempo. Corriente partida con resistencias primarias
-
Partida estrella - tringuloYYn (rpm)t (s)La corriente de partida es tpicamente 250% de la corriente nominal. La corriente es reducida en proporcin cuadrtica a la reduccin de voltajeEn conexin estrella estrella cada bobinado del motor queda sometido a la tensin nominal dividido por el factor En esta tcnica se arranca el motor con los bobinados del estator conectados en estrella, as la tensin aplicada es de 57,7% de la nominal con lo cul se reduce la corriente de arranque a aproximadamente 250 % de la nominal, una vez que el motor a estabilizado su velocidad se realiza la transicin de las bobinas a una conexin en tringulo (por medio de un temporizador y juego de contactores) con lo que el motor queda sometido a la tensin nominal.Corriente partida estrella - tringulo
-
Para que este mtodo pueda ser aplicado, el motor debe poder funcionar en rgimen permanente en conexin tringulo a la tensin asignada de la red. La conexin de las bobinas puede ser modificado debido a que todos los motores de induccin tienen accesibles en su caja de bornes los seis terminales correspondientes a los extremos de las fases del estator, para su conexin en tringulo o en estrella.Funcionamiento: La marcha se inicia al pulsar S1,Entran KA1,KM1 y KM3.Conexin estrella: transcurrido un tiempo, el temporizador KA1 acciona su contacto temporizado desconectando a KM3 y conectando a KM2, que estn enclavados elctricamente y mecnicamenteConexin tringulo: al conectarse KM2 se desconectar KA1. El paro se hace al pulsar S2 o por activacin de F1.
-
L1L2L3FKM1KM2KM3F1U1V1W1U1W1V1U2V2W2U2V2W2L1F3S2F1S1KM1KM2KA1KA1KM1KM2KM3KM2KM2KM3NF: fusibles generales de proteccinKM1, KM2, KM3: contactores de potenciaF1: rel trmico de proteccinM: motor trifsico de induccinMotor 3
-
Placa de bornes La placa de bornes de un motor de induccin lleva, por lo general, seis terminales accesibles unidos directamente a los extremos de cada una de las tres fases del estator. En el caso de motores de rotor devanado hay adems otros tres terminales correspondientes a los extremos de fase libres. Estos terminales reciben denominaciones normalizadas, los principios de fase con las letras U1, V1, W1 (antes U, V, W) y los finales con las letras U2, V2, y W2 (antes X, Y, Z). En la disposicin normal, los extremos de una misma fase no estn alineados con objeto de que sea fcil la realizacin de las conexiones estrella y tringulo con pletinas de cobre normalizadas.La posibilidad de conexin de estos motores en estrella o en tringulo permite el funcionamiento con dos tensiones distintas, la mayor correspondiente a la conexin Y (estrella) y la menor a la conexin (delta). Placa de bornesConexin estrellaConexin tringulo
-
Simple. Econmico para bajas potencias.
Corriente de partida ms baja.Ventajas partida estrella - tringulo
-
El abaratamiento de los costos e los componentes electrnicos de potencia ha permitido recientemente la utilizacin, cada vez ms frecuente, de arrancadores estticos (partidores suaves), estos dispositivos funcionan tambin bajo el principio de reduccin de la tensin estatrica, pero lo hacen variando de forma continua el valor eficaz de la tensin aplicada al estator. Tensin de redngulo de disparoTensin aplicadaForma de onda de la tensin de una fase6 SCR, 2 por cada fase conectados en antiparalelo.Partida con partidor suave
-
Voltaje eficaz en la carga depende del ngulo de disparoTensin en la carga: ngulo de disparot
-
El circuito de control va reduciendo progresivamente, y de forma automtica, el ngulo de disparo a medida que el motor se acelera de forma que se mantenga constante el valor eficaz de la intensidad absorbida en la partida, en un valor predefinido anteriormente.
-
Estado Slido sin partes en movimiento, menos mantencin Reducida corriente de partida y choque mecnico. Suave, sin pasos de aceleracin y desaceleracin La aplicacin progresiva de un torque de arranque creciente hace que los componentes mecnicos que componen la transmisin (acoplamientos, engranajes, etc) estn sometidos a torques transitorios muy pequeos)Fcil ajuste para todas las aplicaciones La aplicacin de un partidor suave permite tambin reducir progresivamente el torque del motor, lo que permite suavizar el proceso de parada. Completo paquete de proteccin de Motor Caractersticas especiales Control de Bombas, Parada suave,Velocidad lenta, Doble ajustes, Ahorro de energa, etc.Relativamente de alto precio, Mayor sofisticacin.Ventajas partida con partidor suaveDesventajas partida con partidor suave
-
Regulacin de velocidad por variador de frecuenciasRecordemos que la velocidad de giro de campo de un motor de induccin (velocidad de sincronismo) es fija y no tiene posibilidad de variacin, debido a que esta velocidad depende del nmero de par de polos y de la frecuencia de la tensin de alimentacinf : frecuencia de la corriente de alimentacinP: par de polos de la mquinaFrecuencia de giro del campo giratorio en r.p.mSolamente variando la frecuencia de alimentacin del motor se podra conseguir variar la velocidad de este.
-
Un variador de frecuencias es un dispositivo electrnico cuyo componente principal es el SCR o IGBT, teniendo como misin la de variar la frecuencia de alimentacin al motor, para as conseguir distintas velocidades. Ahora bien un aumento de frecuencia exige un aumento de tensin y una disminucin de frecuencia, reduccin de tensin. La tensin y la frecuencia varian siempre en igual proporcin. Si se bajara por ejemplo la tensin, la intensidad de corriente aumentara tanto que podra quemar el motor. VfVariador de frecuenciasVfnnUn variador de frecuencias debe satisfacer los siguientes requerimientos bsicos: Capacidad de ajustar la frecuencia de acuerdo a la velocidad de salida deseada Capacidad de ajustar el voltaje de salida de tal manera que permita mantener el torque en una regin constante Capacidad de suministrar una corriente constante a cualquier frecuenciaV/f = cteVariador de frecuenciasV/f = cte
-
Motor 3RSTEtapa rectificadoraFiltroEtapa inversoraCircuito de disparo de los IGBTControl digitalRealimentacin de corriente de cada fase del motorRealimentacin de tensin Referencia de frecuencia deseada Vdc(0 10 V)IfVfModulacin PWM: (Pulse wide modulation): El mtodo consiste en generar una tensin en forma de tren de pulsos de altura fija, pero de ancho ms o menos proporcional a la amplitud de una onda senoidalCorriente en el motorTensin en la salida del variadorEl motor es una carga R-L, acta como un filtro, produciendo una corriente senoidal a partir de una tensin en forma de tren de pulsos
-
Diagrama de bloques de un lazo de control de velocidad Variador de frecuenciasMotor de induccinControlador(PLC, DSP, microcontrolador)Tacogenerador_+VcVmn (velocidad del motor rpm)Medicin de velocidad (tensin proporcional a la velocidad)V, fVelocidad deseada (tensin de referencia proporcional a la velocidad deseada)
-
Ventajas de utilizar un variador de frecuencias El variador de velocidad no tiene elementos mviles, ni contactos La conexin del cableado es muy sencilla Permite arranques suaves, progresivos y sin saltos Controla la aceleracin y el frenado progresivo Limita la corriente de arranque Permite el control de rampas de aceleracin y deceleracin regulables en el tiempo Consigue un ahorro de energa cuando el motor funcione parcialmente cargado con accin directa sobre el factor de potencia Puede detectar y controlar la falta de fase a la entrada y salida de un equipo Protege al motor Puede controlarse directamente a travs de un PLC, DSP, microprocesador, etc. Permite monitorear las variables (tensin, frecuencia, r.p.m, etc) Permite realizar la inversin de giro del motor de induccin
-
Aplicaciones de un variador de frecuencias Correas transportadoras. Controlan y sincronizan la velocidad de produccin de acuerdo al tipo de producto que se transporta, para dosificar, para evitar ruidos y golpes en transporte de botellas y envases, para arrancar suavemente y evitar la cada del producto que se transporta, etc. Bombas y ventiladores centrfugos. Controlan el caudal, uso en sistemas de presin constante y volumen variable. En este caso se obtiene un gran ahorro de energa porque el consumo vara con el cubo de la velocidad, o sea que para la mitad de la velocidad, el consumo es la octava parte de la nominal. Bombas de desplazamiento positivo. Control de caudal y dosificacin con precisin, controlando la velocidad. Por ejemplo en bombas de tornillo, bombas de engranajes. Para transporte de pulpa de fruta, pasta, concentrados mineros, aditivos qumicos, chocolates, miel, barro, etc. Ascensores y elevadores. Para arranque y parada suaves manteniendo la cupla del motor constante, y diferentes velocidades para aplicaciones distintas. Extrusoras. Se obtiene una gran variacin de velocidades y control total de la cupla del motor. Prensas mecnicas y balancines. Se consiguen arranques suaves y mediante velocidades bajas en el inicio de la tarea, se evitan los desperdicios de materiales. Consigue un ahorro de energa cuando el motor funcione parcialmente cargado con accin directa sobre el factor de potencia Mquinas textiles. Para distintos tipos de materiales, inclusive para telas que no tienen un tejido simtrico se pueden obtener velocidades del tipo random para conseguir telas especiales. Compresores de aire. Se obtienen arranques suaves con mxima cupla y menor consumo de energa en el arranque. Pozos petrolferos. Se usan para bombas de extraccin con velocidades de acuerdo a las necesidades del pozo.
-
Motor asncrono trifsico