7. Ilustración del funcionamiento del programa -...
18
Capítulo 7: Ilustración del funcionamiento del programa 45 CAPÍTULO 7: ILUSTRACIÓN DEL FUNCIONAMIENTO DEL PROGRAMA
Transcript of 7. Ilustración del funcionamiento del programa -...

Capítulo 7: Ilustración del funcionamiento del programa
45
CAPÍTULO 7: ILUSTRACIÓN DEL
FUNCIONAMIENTO DEL PROGRAMA

Capítulo 7: Ilustración del funcionamiento del programa
46
1. INTRODUCCIÓN
En este capítulo se pretende dar una muestra de la utilidad del preprocesador de vías para la
simulación de vehículos ferroviarios. Se mostrarán los resultados de la simulación de distinto
material móvil sobre distintos trazados, tratando de abarcar el mayor número de casos y así
mostrar todo el potencial del programa.
Cabe recordar que las condiciones de las simulaciones serán las siguientes:
‐ La simulación se realizará mediante un programa de integración orientado a sistemas
multicuerpo.
‐ Teoría exacta de Kalker para el modelado de las fuerzas de creep.
‐ Método del contacto elástico para el modelado del contacto entre rueda y carril.
‐ Se considerará la posibilidad de contacto en el flanco, además de en la llanta. Este
contacto también se modelará con el método del contacto elástico también.
‐ La vía se considera continuamente apoyada sobre la plataforma completamente rígida.
‐ Las vías serán ideales, es decir, carecerán de imperfecciones geométricas.
En los siguientes apartados se describirá el material móvil usado y los distintos trazados,
concluyendo con los resultados más significativos.
Cabe mencionar que en este capítulo se exponen ejemplos muy básicos debido a que de ellos
se conocen resultados de otras investigaciones, por lo que nos sirven de base para validar el
programa. Sin embargo, el preprocesador está diseñado para la generación de trazados más
complicados, ya que su objetivo era generar cualquier tipo de recorrido.
2. DEFINICIÓN DEL MATERIAL MÓVIL
El material móvil a simular será primero un eje solo (wheelset) y un bogie. Todo el material
móvil será de acero, de constantes E = 206 GPa y ν = 0,296.
A continuación se muestran los modelos usados para describirlos.

Capítulo 7: Ilustración del funcionamiento del programa
47
2.1. Wheelset
El wheelset considerado consta de dos ruedas unidas por un eje. Esta unión será rígida, por lo
que el conjunto será un sólido rígido. Su origen de referencia estará situado en el centro de
gravedad del eje. Las dimensiones del wheelset se muestran en la Figura 7.1.
De esta manera tendremos dos sólidos: el eje y la barra fija.
Figura 7.1: Wheelset
Para el análisis dinámico del sistema se requieren las masas e inercias del wheelset. Se han
considerado los siguientes valores:
‐ Masa total = 1568 kg.
‐ Ixx = 656 kgm2.
‐ Iyy = 168 kgm2.
‐ Izz = 656 kgm2.
‐ Ixy = Ixz = Iyz = 0 kgm2.
2.2. Bogie
El bogie es un sistema en el que se sitúa un marco sobre dos ejes mediante una suspensión,
llamada primaria. Sobre los bogies se encuentran suspendidas las cajas del material móvil
mediante la suspensión secundaria. El uso de bogies se justifica por la mayor estabilidad que

Capítulo 7: Ilustración del funcionamiento del programa
48
confieren al tren tanto en curvas como ante irregularidades de la vía, absorbiendo parte de las
excursiones que provocan.
El modelado del bogie consistirá en dos wheelset (de iguales dimensiones a las del apartado
anterior) iguales sobre los que descansará un marco o frame que los une. La unión entre el
marco y los ejes se realizará mediante suspensiones longitudinales, verticales y laterales (en
total cuatro por rueda, ver Figura 7.3). Para permitir el giro de los ejes, la suspensión irá unida
a cuatro cajas de grasa y estas, a su vez, a los ejes mediante pares de revolución. Esto hace
que, junto con la barra fija (1), tengamos seis sólidos (consideramos las cajas de grasa en cada
eje como una sola).
Figura 7.2: Modelo de bogie
Las características dinámicas de los elementos son las siguientes:
‐ Ejes:
o Masa total = 933 kg.
o Ixx = 461,4 kgm2.
o Iyy = 61,6 kgm2.
o Izz = 461,4 kgm2.
o Ixy = Ixz = Iyz = 0 kgm2.

Capítulo 7: Ilustración del funcionamiento del programa
49
‐ Cajas de grasa:
o Masa total = 176 kg.
o Ixx = 144,5 kgm2.
o Iyy = 2,2 kgm2.
o Izz = 144,5 kgm2.
o Ixy = Ixz = Iyz = 0 kgm2.
‐ Marco:
o Masa total = 1982 kg.
o Ixx = 1398,5 kgm2.
o Iyy = 2667 kgm2.
o Izz = 2667 kgm2.
o Ixy = Ixz = Iyz = 0 kgm2.
Por otra parte, los datos de las suspensiones son los siguientes:
‐ Laterales:
o Rigidez = 62,6 10⋅Nm
. o Longitud natural del muelle = 0,2 m.
o Amortiguamiento = 370,29 10⋅Nm/s
.
‐ Longitudinales:
o Rigidez = 66,2 10⋅Nm
. o Longitud natural = 0,275 m.
o Amortiguamiento = 386,29 10⋅Nm/s
.
‐ Verticales:
o Rigidez = 61,3 10⋅Nm
. o Longitud natural = 0,25 m.
o Amortiguamiento = 355,41 10⋅Nm/s
.
Capítulo 7: Ilustración del funcionamiento del programa
50
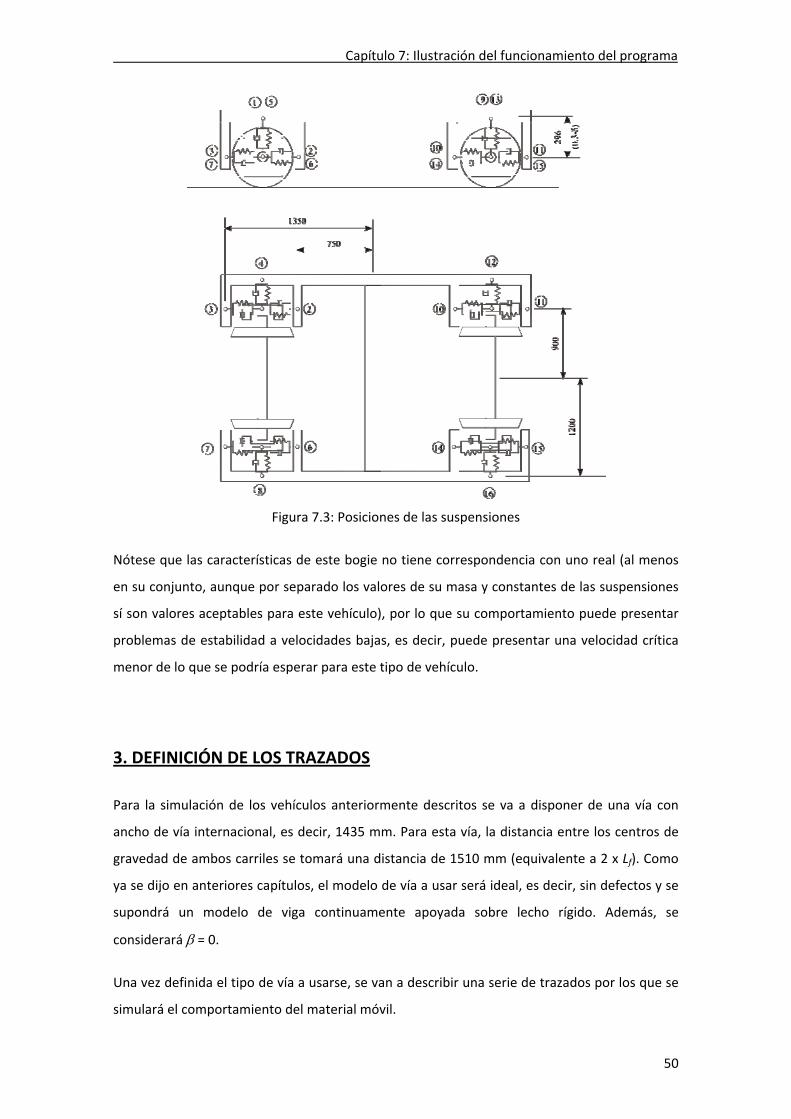
Figura 7.3: Posiciones de las suspensiones
Nótese que las características de este bogie no tiene correspondencia con uno real (al menos
en su conjunto, aunque por separado los valores de su masa y constantes de las suspensiones
sí son valores aceptables para este vehículo), por lo que su comportamiento puede presentar
problemas de estabilidad a velocidades bajas, es decir, puede presentar una velocidad crítica
menor de lo que se podría esperar para este tipo de vehículo.
3. DEFINICIÓN DE LOS TRAZADOS
Para la simulación de los vehículos anteriormente descritos se va a disponer de una vía con
ancho de vía internacional, es decir, 1435 mm. Para esta vía, la distancia entre los centros de
gravedad de ambos carriles se tomará una distancia de 1510 mm (equivalente a 2 x Lf). Como
ya se dijo en anteriores capítulos, el modelo de vía a usar será ideal, es decir, sin defectos y se
supondrá un modelo de viga continuamente apoyada sobre lecho rígido. Además, se
considerará β = 0.
Una vez definida el tipo de vía a usarse, se van a describir una serie de trazados por los que se
simulará el comportamiento del material móvil.

Capítulo 7: Ilustración del funcionamiento del programa
51
Primero se realizará una ilustración del fenómeno de hunting o lazo [3] [7], es decir, dado un
pequeño desplazamiento lateral en una vía recta, el material móvil describe una trayectoria
sinusoidal en el plano de la vía debida a la conicidad de las ruedas. Mediante la fórmula de
Klingel (7.1) podemos la frecuencia teórica de este movimiento.
f
VL rαω =⋅
(7.1)
Donde V es la velocidad, Lf es el semiancho de vía (755 mm), r el radio de la rueda (457 mm) y
a es la conicidad de la rueda (0,02559). Con esto tenemos una relación entre la frecuencia de
oscilación y la velocidad como marca la ecuación (7.2).
0,27234Vω = (7.2)
Se comparará el hunting inestable del eje con el estable del bogie (por debajo de su velocidad
crítica) para una velocidad de 20 m/s, con lo que la frecuencia de oscilación será 5,45 rad/s
(0,867 Hz).
Por otra parte también se analizará el comportamiento del eje en curvas sin peralte.
Analizando el comportamiento estacionario de ejes en vías curvas se puede obtener el
desplazamiento lateral (7.3) y el ángulo de yaw del eje (7.4) [6] en la posición de equilibrio (ver
Figura 7.4). Con esto se tiene una referencia para analizar los resultados obtenidos en las
simulaciones.
feq
L ry
Rα= − (6.3)
( )2 sin12eq
mV mg
f R
ϕθ
−= (6.4)
Donde f es una constante (2.245.000), m es la masa de un eje (1568 kg), g la gravedad (9,81
m/s2), R el radio de la curva y ϕ el ángulo de peralte.
Según (7.3) podemos calcular aproximadamente el radio crítico para el cual habrá contacto
permanente del flanco con el carril. Entre ellos existe una holgura de 9 mm, por lo que
sustituyendo esta distancia en (7.3) tenemos un radio R = 1542 m mínimo para que no haya
contacto en el flanco en régimen permanente. Esta fórmula es aproximada, por lo que este

Capítulo 7: Ilustración del funcionamiento del programa
52
límite no es exacto. Para el ejemplo se usará una curva de radio R = 3000 m a una velocidad de
5 m/s, con lo que debemos obtener eqy = 4,49 mm y eqθ = 0,0001667º, aproximadamente.
Figura 7.4: Desplazamiento lateral y ángulo de yaw de un eje en curvas
Por último se realizarán simulaciones en trazados más complicados donde se podrá ver el
potencial de este preprocesador.
El primer caso corresponderá a un problema propuesto (“Track case 1”) extraído de “The
Manchester Benchmarks for rail vehicle simulation” [9]. Aunque en dicha referencia se
propone un tipo de bogie determinado, se usará el bogie del que se dispone, descrito en el
apartado anterior, para realizar las simulaciones. Además, se simplificará el trazado de manera
que la primera recta sólo tenga 10 m de longitud, se le da al bogie una desviación inicial de 1
mm y no haya cambio en la evolución del peralte (dip) en la segunda transición horizontal,
como se proponía. El recorrido es el descrito en la Figura 7.5. Nos referiremos a este caso
como Recta‐Transición‐Curva. La velocidad de avance será de 4,4 m/s [9].
Figura 7.5: Recorrido simplificado del “Track case 1”

Capítulo 7: Ilustración del funcionamiento del programa
53
El siguiente caso ilustrará el comportamiento de material móvil (en este caso un wheelset) al
subir una pendiente. Esto se hace simplemente para tener una representación de vía
tridimensional. Se referirá a este ejemplo como Transición‐Pendiente. En la Figura 7.6 se
puede ver la descripción del trazado. La velocidad de avance será de 10 m/s y la pendiente
será del 5%, bastante elevada para un tren convencional.
Figura 7.6: Trazado de tramo en pendiente
4. RESULTADOS
En este apartado se exponen los resultados más representativos de las simulaciones realizadas
con los vehículos y trazados expuestos en los apartados anteriores.
4.1. Hunting en eje solo
Para que el eje presente movimiento de hunting se le ha dado un pequeño empujón lateral en
forma de condiciones iniciales de velocidad lateral. Dicha velocidad es 1 mm/s.
En la Figura 7.7 se puede ver la inestabilidad de un eje solo frente a este fenómeno. El
desplazamiento lateral toma forma sinusoidal de frecuencia aproximadamente ocho ciclos y

Capítulo 7: Ilustración del funcionamiento del programa
54
medio por cada diez segundos, coherente con la frecuencia de 0,867 Hz obtenida mediante la
ecuación de Klingel.
Se aprecia cómo a partir de los quince segundos el movimiento presenta amplitud constante
de 9 mm, la holgura existente entre rueda y carril.
Comparando con las Figuras 7.8 y 7.9, donde se ve la fuerza normal sobre las llantas y en los
flancos se observa que lo que ocurre es que están chocando alternativamente los flancos,
impidiendo así que la amplitud pueda aumentar. Este hecho es peligroso porque puede
ocasionar el descarrilamiento.
0 5 10 15 20‐10
‐5
0
5
10
Desplazam
iento latera (m
m)
Tiempo (s)
Figura 7.7: Movimiento de hunting inestable
Analizando más detenidamente la Figura 7.8 se puede observar cómo antes de que se
produjese el contacto la fuerza ronda los 7840 N (784 kg), correspondientes a la mitad del peso
del eje. Esto es lógico porque, si no hay otra solicitación, la llanta de cada rueda debe soportar
la mitad del peso total del eje.
Si nos centramos en la Figura 7.9 podemos ver que el orden de magnitud de la fuerza
provocada por los choques entre la pestaña y el carril es de 20.000 N.

Capítulo 7: Ilustración del funcionamiento del programa
55
5 10 15 20
2
4
6
8
10
Fuerza normal en llantas (kN)
Tiempo (s)
Rueda izquierda Rueda derecha
Figura 7.8: Fuerza normal sobre llantas en eje
15 200
5
10
15
20
Fuerza normal en fla
nco (kN)
Tiempo (s)
Rueda izquierda Rueda derecha
Figura 7.9: Fuerza normal sobre flancos en eje
Capítulo 7: Ilustración del funcionamiento del programa
56
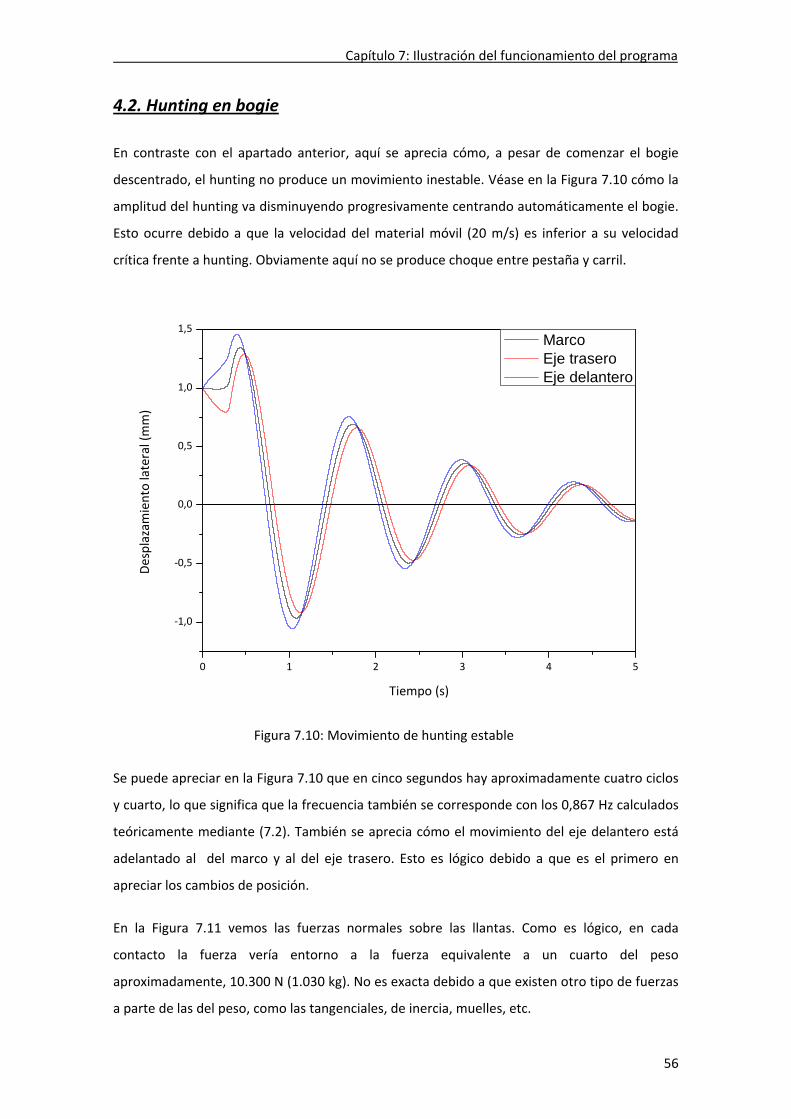
4.2. Hunting en bogie
En contraste con el apartado anterior, aquí se aprecia cómo, a pesar de comenzar el bogie
descentrado, el hunting no produce un movimiento inestable. Véase en la Figura 7.10 cómo la
amplitud del hunting va disminuyendo progresivamente centrando automáticamente el bogie.
Esto ocurre debido a que la velocidad del material móvil (20 m/s) es inferior a su velocidad
crítica frente a hunting. Obviamente aquí no se produce choque entre pestaña y carril.
0 1 2 3 4 5
‐1,0
‐0,5
0,0
0,5
1,0
1,5
Desplazam
iento lateral (mm)
Tiempo (s)
Marco Eje trasero Eje delantero
Figura 7.10: Movimiento de hunting estable
Se puede apreciar en la Figura 7.10 que en cinco segundos hay aproximadamente cuatro ciclos
y cuarto, lo que significa que la frecuencia también se corresponde con los 0,867 Hz calculados
teóricamente mediante (7.2). También se aprecia cómo el movimiento del eje delantero está
adelantado al del marco y al del eje trasero. Esto es lógico debido a que es el primero en
apreciar los cambios de posición.
En la Figura 7.11 vemos las fuerzas normales sobre las llantas. Como es lógico, en cada
contacto la fuerza vería entorno a la fuerza equivalente a un cuarto del peso
aproximadamente, 10.300 N (1.030 kg). No es exacta debido a que existen otro tipo de fuerzas
a parte de las del peso, como las tangenciales, de inercia, muelles, etc.

Capítulo 7: Ilustración del funcionamiento del programa
57
0 1 2 3 4 510,0
10,2
10,4
10,6Fuerza normal sob
re llanta (kN)
Tiempo (s)
Eje trasero, rueda izquierda Eje trasero, rueda derecha Eje delantero, rueda izquierda Eje delantero, rueda derecha
Figura 7.11: Fuerzas normales sobre llantas en bogie
4.3. Eje en curva
En la Figura 7.12 se muestra la evolución de las indentaciones en cada rueda comparadas con
los resultados obtenidos por un procesador específico de vías curvas. Indentaciones negativas
representan la distancia del flanco al carril, representando una manera de ver la evolución del
desplazamiento lateral con respecto de la línea central. Se ve cómo el movimiento del eje es
armónico, no estabilizándose en el valor de equilibrio. Los resultados con ambos programas
son muy similares, variando probablemente por alguna condición inicial. Por ejemplo, en el
caso del resultado obtenido con el programa para vías curvas exclusivamente, se tiene una
posición “z” inicial ligeramente superior.
En la Figura 7.13 se puede ver el desplazamiento con respecto de la línea central obtenido con
el preprocesador de vías objeto del proyecto. La media de este desplazamiento es ‐4.1855
mm, con lo que el resultado es razonablemente parecido al teórico. El ángulo de yaw también
oscilará en torno a un valor medio de 0,0002151º, 30% mayor que el calculado analíticamente.

Capítulo 7: Ilustración del funcionamiento del programa
58
0 5 10 15 20
‐18
‐16
‐14
‐12
‐10
‐8
‐6
‐4
‐2
0
2Inde
ntación (m
m)
Tiempo (s)
Flanco izquierdo, solución preprocesador Flanco derecho, solución preprocesador Flanco izquierdo, solución vía curva Flanco izquierdo, solución vía curva
Figura 7.12: Indentaciones de los flancos con respecto de los carriles
0 5 10 15
‐10
‐8
‐6
‐4
‐2
0
2
Desplazam
iento lateral (mm)
Tiempo (s)
Figura 7.13: Desplazamiento lateral del eje

Capítulo 7: Ilustración del funcionamiento del programa
59
4.4. Recta‐Transición‐Curva
Este trazado contiene dos transiciones, con lo que será el ejemplo más interesante a seguir.
Hay que recordar que es un trazado simplificado con respecto del original propuesto en [9],
además de tener un vehículo distinto. Por ello los resultados no son directamente comparables
con los de otras investigaciones.
0 5 10 15 20 25 300
10
20
30
40
Desplazam
iento lateral (m)
Tiempo (s)
Eje trasero Eje delantero Marco
Figura 7.14: Desplazamiento lateral
Primero se mostrará la evolución lateral y vertical en las Figuras 7.14 y 7.15. Aquí no se aprecia
nada especial, más que, debido al peralte, en 7.15 se observa como progresivamente las
ruedas bajan hasta tomar la curva, donde su altura permanece constante para volver
progresivamente a su posición vertical inicial cuando se entra en la segunda transición. Si
calculamos el ángulo de peralte de equilibrio tenemos que es de 0,754º, y el usado en esta
simulación es del orden de cinco veces mayor, lo que explicaría esta caída en la coordenada
vertical.
En la Figura 7.16 podemos ver como se da un contacto permanente entre la pestaña de las
ruedas exteriores con los carriles, lo que puede ser debido a que el radio de la curva es
demasiado pequeño para este vehículo. Nótese también que la holgura para este bogie es de
6,5 mm solamente, debido a que se usan perfiles diferentes de ruedas, cosa que puede
potenciar este hecho.

Capítulo 7: Ilustración del funcionamiento del programa
60
0 5 10 15 20 25 30428,4
428,6
428,8
429,0
429,2
429,4
429,6
429,8
430,0Desplazam
iento vertical (m
m)
Tiempo (s)
Eje trasero Eje delantero
Figura 7.15: Desplazamiento vertical
0 5 10 15 20 25 30‐14
‐12
‐10
‐8
‐6
‐4
‐2
0
2
Indentación (m
m)
Tiempo (s)
Figura 7.16: Indentación de rueda trasera izquierda

Capítulo 7: Ilustración del funcionamiento del programa
61
En la Figura 7.17 podemos ver la fuerza normal de dicho contacto comparada con la normal a
la llanta, apreciándose una transferencia de carga de la llanta a la pestaña. Los picos en la
llanta se dan debido a la evolución lineal del peralte en las transiciones, lo que conlleva una
discontinuidad en su primera derivada al comienzo y final del tramo. Los aumentos y
decrementos en la fuerza normal se deben al progresivo aumento/decremento del peralte en
las ruedas derechas/izquierdas del eje.
0 5 10 15 20 25 300
2
4
6
8
10
12
14
16
Fuerza normal (kN)
Tiempo (s)
Llanta izquierda Llanta derecha Flanco izquierdo Flanco derecho
Figura 7.17: Fuerzas sobre llanta y flanco del eje delantero
4.5. Transición‐Pendiente
Para este último ejemplo no se tiene referencia en el comportamiento, por lo que
simplemente se comentarán las gráficas sin hacer juicio de valor. Primero, en la Figura 7.18 se
aprecia cómo el wheelset, en efecto, sigue la evolución deseada.
En la Figura 7.19 se puede comprobar cómo aumenta la fuerza normal en el eje, lo que se debe
a la fuerza centrífuga que lleva al bogie a ejercer más presión sobre la vía en la primera
transición. En la segunda transición pasa lo contrario ya que la dirección de la fuerza centrífuga
es contraria.

Capítulo 7: Ilustración del funcionamiento del programa
62
0 1 2 3 4 5 6
0,5
1,0
1,5
2,0
2,5Desplazam
iento vertical (m
)
Tiempo (s)
Figura 7.18: Desplazamiento vertical del eje
0 1 2 3 4 5 67,0
7,2
7,4
7,6
7,8
8,0
8,2
8,4
Fuerza normal (kN)
Tiempo (s)
Figura 7.19: Fuerza normal en eje