6. ESTIMACION DE CARACTERÍSTICAS DE VUELO. CREACIÓN DE...
84
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME 1 6. ESTIMACION DE CARACTERÍSTICAS DE VUELO. CREACIÓN DE UNA HERRAMIENTA DE CÁLCULO PROPIA. Con el concepto del avión ya acotado, el paso siguiente es el de profundizar y afinar el diseño del mismo iterando cuando sea necesario hasta conseguir definir todas las dimensiones del avión incluyendo superficies de mando, centrado y reglajes. Es una tarea que requiere mucho tiempo y que se repite para cada diseño de avión diferente que se realice o incluso para cualquier pequeña modificación que se le quiera hacer al avión. Es por ello que desde el punto de vista de la empresa resulte muy ventajoso el disponer de una herramienta de cálculo lo suficientemente potente para obtener resultados rápidos de las actuaciones del avión a partir de los datos que pueden obtenerse en un diseño preliminar como el realizado en el apartado anterior. Esto permitirá ahorrar tiempo en el diseño de un nuevo avión si se da el caso, pero sobre todo, permitirá evaluar rápidamente los beneficios o perjuicios de pequeñas modificaciones en los aviones de serie como cambios en la aerodinámica, adaptación de motores diferentes, elegir la hélice que mejor se ajusta a las necesidades de cada cliente, etc. De forma rápida y eficaz. A continuación se explica con detalle la filosofía del programa de cálculo y toda su estructura y funcionamiento.
Transcript of 6. ESTIMACION DE CARACTERÍSTICAS DE VUELO. CREACIÓN DE...

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
1
6. ESTIMACION DE CARACTERÍSTICAS DE VUELO. CREACIÓN DE UNA
HERRAMIENTA DE CÁLCULO PROPIA.
Con el concepto del avión ya acotado, el paso siguiente es el de profundizar y
afinar el diseño del mismo iterando cuando sea necesario hasta conseguir definir todas
las dimensiones del avión incluyendo superficies de mando, centrado y reglajes. Es
una tarea que requiere mucho tiempo y que se repite para cada diseño de avión
diferente que se realice o incluso para cualquier pequeña modificación que se le quiera
hacer al avión.
Es por ello que desde el punto de vista de la empresa resulte muy ventajoso el
disponer de una herramienta de cálculo lo suficientemente potente para obtener
resultados rápidos de las actuaciones del avión a partir de los datos que pueden
obtenerse en un diseño preliminar como el realizado en el apartado anterior. Esto
permitirá ahorrar tiempo en el diseño de un nuevo avión si se da el caso, pero sobre
todo, permitirá evaluar rápidamente los beneficios o perjuicios de pequeñas
modificaciones en los aviones de serie como cambios en la aerodinámica, adaptación
de motores diferentes, elegir la hélice que mejor se ajusta a las necesidades de cada
cliente, etc. De forma rápida y eficaz.
A continuación se explica con detalle la filosofía del programa de cálculo y toda
su estructura y funcionamiento.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
2
6.1. Objetivo y alcance del programa.
Éste apartado consiste en crear un programa capaz de realizar el proceso de
adaptación de la hélice para un avión, ya sea a velocidad máxima o a una velocidad
inferior a la máxima y calcular posteriormente las actuaciones básicas del mismo así
como las carreras de despegue y aterrizaje. También ha de ser capaz de calcular las
actuaciones de un avión partiendo de una hélice ya adaptada.
Para programar la aplicación se ha tomado tomando como herramienta el
Microsoft Excel y macros con Visual Basic Applications (VBA). Así se ha conseguido
una interfaz rápida y visual, ofreciendo resultados con gráficas y tablas y presentando
la mayor parte de los datos simultáneamente dando la posibilidad de imprimir o
guardar todos los datos que se necesiten para compararlos con los resultantes de
alguna modificación del avión u otras condiciones de contorno.
Este programa deja abierta la puerta a futuras mejoras, facilitando las posibles
modificaciones gracias al uso de las Macros, que son unidades cortas e
independientes de programa que se activan cuando es necesario y con ellas se forma
el programa principal, de forma que para modificar algún proceso de cálculo existente
solo es necesario cambiar una de esas unidades por otra que se considere más eficaz.
A continuación explicaremos en cada apartado, todo el funcionamiento del
programa, la forma de usarlo y las bases teóricas así como su aplicación al proyecto.
Al final del presente documento se adjunta el texto usado en la programación
de las macros para que pueda ser valorado y estudiado en profundidad si fuese de
interés.
En todo momento se ha intentado hacer un programa que resulte flexible ante
la no disponibilidad de algún dato de forma que esa carencia pueda ser suplida
mediante la utilización de procedimientos de cálculo alternativos. También se ha
cuidado el dar la posibilidad de cambiar algún dato y repetir el cálculo de forma
sencilla así como ofrecer variedad en las condiciones de cálculo o permitir realizar el
cálculo desde distintos puntos de partida.
Puesto que la realización de un programa de éstas características resulta
tedioso y complicado es posible que se hayan introducido errores que no se han

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
3
detectado todavía y que por ello no se haya conseguido el grado de precisión y
flexibilidad deseado, sobre todo en ciertas condiciones de contorno alejadas del las
condiciones en las que se ha probado se obtengan resultados erróneos o poco
aproximados. És por éllo que se recomienda usar el programa con cierto criterio y
comprobar los resultados para evaluar si se consideran razonables o no.
Hay que conseguir que sea fácil de usar y cómodo a la hora de leer los
resultados y manejarlos.
Se organizará de forma que facilite, en la medida de lo posible, posteriores
ajustes y reformas en el programa.
Se comentarán los cálculos para permitir una rápida comprensión del
funcionamiento del programa y se desarrollarán las bases teóricas para que éste
documento recopile la información básica y sea una referencia a la que acudir para
futuros proyectos.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
4
6.2. Esquema de funcionamiento.
De forma muy resumida el programa funciona de la siguiente manera:
Aprovechando las ventajas de las hojas de cálculo, se utilizarán éstas para las
presentaciones en pantalla, de forma que la introducción y devolución de los datos se
hace en las celdas indicadas en la hoja.
Una vez introducidos los datos se pulsa sobre los botones que se encuentran
junto a las celdas de introducción de datos o junto a las celdas con los resultados del
cálculo, dependiendo de cada caso.
Estos botones tienen la función de activar las macros necesarias para cada
cálculo en concreto, iniciando así el proceso que lleva a obtener los resultados
numéricos, los cuales serán enviados desde la macro a la hoja de cálculo en la que se
presentarán en las unidades correspondientes junto a algún comentario si hiciera falta.
En ciertos casos se presentarán los resultados numéricos junto a gráficas, que
ofrecen una mejor comprensión de los mismos y facilitan así la toma de decisiones.
Para la creación las gráficas se usan los datos devueltos por las macros.
La comunicación de la macro con las hojas de cálculo, ya sea para entrada o
para salida de datos se hace mediante una hoja al final de todas llamada “Ref.celdas”.
El motivo de esto es el cumplimiento de uno de nuestros objetivos, que es el de
permitir y facilitar en la medida de lo posible futuras modificaciones.
Al usar únicamente ésta hoja para la comunicación con la macro existe la
posibilidad de cambiar la apariencia de las hojas de recogida de datos y de
presentación de resultados moviendo las celdas para introducir nuevas tablas de datos
o recolocarlas como sea necesario, sin que por ello haya que modificar las macros,
puesto que las celdas de entrada o salida de datos estarán siempre referidas a su
celda correspondiente –y siempre la misma para cada dato– en la hoja “Ref.celdas” de
comunicación con las macros.
La causa de ésto es que para que una macro se comunique con las hojas de
cálculo, esto es, que tome unos datos de entrada que estén en una hoja y devolver

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
5
unos datos de salida en la misma u otra hoja, hay que indicar en la macro la celda
concreta de la que recoger o a la que enviar datos.
Para hacer esto se presentaban dos opciones, entre ellas la que se han
explicado anteriormente, que ha sido la elegida y una segunda que consiste en darle a
cada celda con dato un nombre, de forma que la macro busque la única celda con ése
nombre en la hoja que le indiquemos, independientemente de su posición dentro de la
hoja, con lo que también conseguiríamos nuestro objetivo.
El problema es que ésta práctica requiere darle a cada celda que se utilice un
nombre diferente, tarea bastante tediosa, y por otro lado tiene la desventaja de que si
en un futuro se hace alguna modificación en el programa por alguien que no sea quien
lo ha creado, ésta persona tendría la tarea de localizar en las hojas de cálculo cada
celda con la que vaya a trabajar, complicándosele el trabajo. Esto es así porque al
darle un nombre a una celda, por ejemplo el del dato que va a contener, se pierde la
información sobre su posición en la hoja de cálculo.
Los motivos explicados son los que han obligado a elegir la primera opción:
una hoja para la comunicación con las macros en las que las celdas con los datos no
vayan a cambiar una vez fijada su posición.
Durante la ejecución del programa hay una serie de operaciones que se usan
repetidamente y para simplificar el programa y facilitar la comprensión del texto se han
creado funciones con esas operaciones y se han guardado en un módulo aparte con el
título “Funciones y subrutinas”. Más adelante se explicará el funcionamiento de cada
una de éstas funciones.
• DESCRIPCIÓN DEL PROGRAMA
El programa se divide en tres partes principales, que se corresponden con las
tres primeras hojas de cálculo: “Datos”, “Hélice” y “Actuaciones”.
o “DATOS”
Ésta primera recoge los datos principales del avión y una vez hecho esto se
calcular la polar mediante el método de Roskam o si se dispone de los coeficientes de
la polar se introducen directamente en las celdas indicadas.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
6
El cálculo se lleva a cabo activando las macros “MetodoParábola” o
“MetodoRoskam” pinchando en los botones “Cálculo de la polar: método parábola” o
“Cálculo de la polar: Roskam” respectivamente. Ambas devuelven los coeficientes de
la parábola e indican cual de ellas se ha utilizado para el cálculo.
En la hoja se presenta una gráfica de la polar.
o “HÉLICE”
A continuación se pasa a ésta hoja donde se trata la parte relacionada con la
hélice, es decir, la adaptación o la introducción de los datos de la hélice ya adaptada
necesarios para el cálculo de actuaciones.
Si ya se dispone de una hélice, se introducen los datos y con ellos el programa
calcula otros necesarios directamente en la hoja de cálculo. A continuación se activa la
macro “ComprobAdapt” que comprueba los datos y que la velocidad de punta de pala
esté por debajo del Mach crítico a la velocidad de adaptación. Si todo está correcto se
pasa a la hoja “Actuaciones”
En caso de que no se disponga de hélice se introducen los datos pedidos en el
apartado correspondiente y se inicia la macro “ComprobDatos” que comprueba que los
datos introducidos son correctos.
A continuación el programa calcula la velocidad máxima aproximada a la altitud
de adaptación que hayamos indicado, mediante la macro “EstimaVeloc” y muestra el
resultado en la tabla de estimación de la velocidad máxima.
El siguiente paso es adaptar la hélice, ya sea a rendimiento máximo con la
macro “AdaptRendOpt” o a rendimiento óptimo con la macro “AdaptRendMax”. La
diferencia entre las dos opciones es que usan curvas de las gráficas de adaptación
diferentes, pero las dos ofrecen el mismo tipo de resultados: cinco soluciones para la
adaptación que van desde un rendimiento máximo a otro mínimo, ambos previamente
fijados en los datos que se piden. Tras realizar los cálculos el programa ofrece los
resultados en unas tablas en las que además de los parámetros de adaptación se
presentan unas actuaciones preliminares calculadas de forma sencilla para dar una
idea de los efectos de cada adaptación y ayudar así en la elección de la hélice. Si a la
vista de los resultados la adaptación no parece adecuada para el rendimiento

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
7
inicialmente introducido, se pueden introducir nuevos valores de los márgenes de
rendimiento y repetir la adaptación.
Se ofrecen unas gráficas con las curvas de potencia necesaria y disponible
para las 5 posibilidades de adaptación. Se encuentran en las hojas “Curvas potencia
Adap Rend Max” y “Curvas potencia Adap Rend Opt”.
Éstas dos macros trabajan llamando a otras macros o subrutinas que son :
“Adapta”, “CurvaPd” y “ActuacsPrevias”, cuyas funciones son sacar los parámetros de
adaptación de la hélice, calcular la curva de potencia disponible para ésta hélice y
calcular las actuaciones preliminares respectivamente. Más adelante, en los apartados
correspondientes, se comentarán en detalle cada una de ellas y se explicará la base
teórica que se ha utilizado.
Si no interesa ninguna de las opciones anteriores, por llevarse a cabo la
adaptación a velocidad máxima, se ofrece también la posibilidad de adaptar la hélice a
una velocidad inferior a la máxima. Se indica ésta previamente en la celda que
corresponde y a continuación se activa la macro “VInferior” la cual adapta la hélice
para cinco rendimientos entre los márgenes que indiquemos en las celdas que se
indican, al igual que en el caso de adaptación a velocidad máxima. En la hoja “Curvas
Adap V<Vmax” se presentan las curvas de potencia necesaria y disponible de las 5
opciones que se ofrecen.
El paso siguiente sería elegir una de las opciones de adaptación, ya se a
velocidad máxima o a velocidad inferior a la máxima, pinchando en el botón
correspondiente. Lo que se consigue con esto es registrar el tipo de adaptación que se
ha hecho y la opción elegida, para que el programa tenga los datos necesarios con los
que continuar.
Cabe la posibilidad de que se necesite adaptar la hélice con una reductora
determinada. Si se da el caso hay que introducir en la celda indicada la relación de
reducción deseada, o de que se dispone. A continuación se activa la macro
“Reductora” que se encarga de llevar a cabo la adaptación dando cinco posibles
adaptaciones para relaciones de reducción entre el valor indicado anteriormente y 1.
Realiza los cálculos llamando sucesivamente a la macro o subrutina “AdapReductora”
que adapta la hélice para la relación de reducción que se le ordena en cada caso. A

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
8
continuación se elige una de las cinco opciones disponibles y el programa estará listo
para pasar a la siguiente hoja.
o “ACTUACIONES”
Llegados a éste punto, el siguiente paso consiste en abrir la hoja “Actuaciones”
y calcular el techo del avión, que servirá para proporcionar cinco valores de la altitud
entre el techo máximo y nivel del mar que serán a las que se calcularán todas las
actuaciones, aunque más adelante se calcularán los techos teórico y práctico de forma
más precisa. Este primer cálculo se hará de forma conservativa y con poca precisión
para no penalizar el tiempo empleado.
A continuación se activará la macro “CurvasPd5h”, que se encarga de calcular
las curvas de potencia disponible y necesaria para las cinco altitudes que
mencionábamos anteriormente. Se presentan dos gráficas para cada altitud: una que
representa las curvas de potencia aproximadas por parábolas y otra que muestra los
puntos calculados de la potencia disponible utilizados para aproximar la curva con una
parábola.
El último paso es calcular las actuaciones para las cinco altitudes calculadas y
además para cinco pesos entre el peso máximo y el mínimo, cada uno con un
porcentaje preestablecido de combustible, que se usa para estimar el alcance y la
autonomía.
Para iniciar el cálculo, antes hay que indicar en la casilla correspondiente la
posición del mando de gases para la que se quieren obtener las actuaciones.
Posteriormente se activa la macro que controla todo el proceso restante, llamada
“CalcActuaHyW” que a su vez llamará a las macros “CalcActuacsH” y “Techos” y la
primera de las dos anteriores llama a las macros “CalculaActuacs” y “Carreras”.
Vemos que es una cadena de macros, controlada por la primera. El proceso se
desarrollará detalladamente más adelante.
El proceso de cálculo de actuaciones tarda unos treinta segundos, a causa del
gran número de iteraciones que se hacen en las veinticinco situaciones para las que
se calculan las actuaciones.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
9
Una vez terminado se presentan las actuaciones en cinco bloques de tres
tablas cada uno. Se ha elegido ésta forma de mostrar los resultados en cumplimiento
de uno de los objetivos del trabajo que es ofrecer todos los resultados posibles
simultáneamente para permitir una rápida comparación entre ellos y facilitar la
comprensión de los mismos.
• INTRODUCCIÓN Y MODIFICACIÓN DE LAS TABLAS
El programa se apoya durante su funcionamiento en las tablas de adaptación
de la hélice, y de potencia de motor que se han obtenido al discretizar el diagrama de
adaptación de Weick para hélices con perfil Raf6 y las curvas de potencia – rpm para
dos motores de la casa Rotax.
Si se quisiera adaptar otro tipo de hélice o usar motores diferentes habría que
introducir nuevas tablas con los datos de las gráficas correspondientes.
Para ello el proceso a seguir es crear una nueva hoja de cálculo dándole el
nombre que consideremos oportuno y a continuación se introducirán los datos
utilizando el mismo formato en cuanto a la posición de los mismos que corresponda,
puesto que el programa toma los datos de unas posiciones predefinidas de las celdas.
En cuanto a la longitud de las tablas, o lo que es lo mismo, de la cantidad de
datos que contengan, no hay ninguna limitación como se entenderá cuando tratemos
la forma en que el programa usa las tablas.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
10
• ESQUEMA DE FLUJO DEL PROGRAMA
Se presenta a continuación un esquema conceptual que muestra de forma
resumida el proceso que sigue el programa.
Figura 6.2.1 Esquema de flujo general del programa

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
11
• FUNCIONES Y SUBRUTINAS
Como se dijo anteriormente se han agrupado en un módulo aparte una serie de
funciones y subrutinas que por su repetido uso podía llegar a dificultar en alguna
medida la comprensión del texto, así como alargarlo innecesariamente.
A continuación iremos describiendo una a una estas funciones y comentando
su relación con el resto del programa.
-“ComprobarNumerico”
Comprueba si un dato es un valor numérico o no. Si no lo es, activa un
mensaje diciendo que el dato tiene que ser un valor numérico. El dato en cuestión se
introduce mediante el argumento “Valor”
-“LeerValor”
Posiblemente la función más usada a lo largo del programa, principalmente al
principio de las macros, en la recogida de datos. Toma el dato existente en la celda de
la hoja que se le ha indicado, y da la posibilidad de comprobar si ese dato es un valor
numérico. Esta opción se usa para la entrada de datos al principio del programa. La
celda y hoja se indican en los argumentos correspondientes y entre comillas, y se
activa o desactiva la comprobación de dato numérico escribiendo “S” o “N”
respectivamente en el último argumento.
El siguiente ejemplo serviría para recoger el dato V de la celda A1 de la hoja
Ref.celdas, sin comprobar si es un valor numérico.
Ej: V = LeerValor (“Ref.celdas”,”A1”,”N”)
-“DatoACelda”
Esta función manda un dato que se le indique a la celda de la hoja que se le
ordene. La forma mandar el dato V a la celda A1 de la hoja Ref.celdas es la siguiente:
Call DatoACelda(“Ref.celdas”,”A1”,V)
-“EntrarEnTabla”
Esta función se usa, como su nombre indica, para entrar en las tablas con un
dato. Hay que indicarle la primera celda de la tabla, y el dato de entrada. El método
que usa es el de leer el dato de la celda activa, compararlo con el de entrada y si es
menor a este último, bajar una celda y volver a repetir el proceso hasta que el valor de

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
12
la celda activa sea mayor o igual que el de entrada. Entonces deja la celda activada
para tenerla de referencia y así tomar los datos de otras columnas de la tabla
mediante referencias relativas de posición.
-“InterpLag”
Para tomar los datos de las tablas de datos del programa que se han obtenido
a partir de curvas de gráficos, se usa una interpolación, mediante cuatro puntos, de
Lagrange. La interpolación en sí se realiza en la tabla de la hoja “Hélice”. Esta función
envía los datos de los cuatro puntos de la curva, que previamente se han obtenido,
que se indican en los argumentos como Xi e Yi y el dato de entrada a la tabla y de ella
lee el valor del dato de salida y lo devuelve. Como ejemplo de utilización se va a pedir
el valor de Xn para una curva que pasa por cuatro puntos (X,Y) entrando con el dato
Yn.
Xn = InterpLag(X1,X2,X3,X4,Y1,Y2,Y3,Y4,Xn)
-“EntrarTablaMot”
Realiza la misma función que “EntrarEnTabla” pero se usa exclusivamente
para las tablas de datos de motor. Hay que indicarle las rpm máximas del motor, el
intervalo de rpm con el que se han introducido los datos y el dato de las rpm del motor
de entrada en la tabla.
-“QueNuD”
Devuelve el valor del coeficiente de rozamiento en el primer tramo del
despegue dependiendo del tipo que pista que se haya elegido.
-“IrFinTabla”
Se usa para crear tablas de datos, como las de las curvas de potencia
disponible creadas a partir de varios puntos exactos de la curva.
Hay que indicarle en los argumentos la hoja de la tabla y la primera celda de la
columna de la tabla en la que se vaya a introducir el siguiente dato. La subrutina lee el
valor de la celda y si está ocupada, o lo que es lo mismo, su valor es distinto de 0
desciende una celda y repite el proceso hasta que encuentra una celda vacía y la deja
seleccionada.
-“BorrarDatos”

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
13
Borra el rango de datos de la hoja que se le indique. La hoja se indica
introduciendo el nombre exacto entre comillas en el primer argumento, y el rango se
indica introduciendo la primera celda, que ocupa el vértice superior izquierdo y la
última, que ocupa el inferior derecho de lo que podría ser una tabla. De hecho en el
programa se usa para borrar las tablas con datos procedentes de cálculos de aviones
anteriores y así facilitar el transcurso del programa.
-“RendIncorr”
Esta subrutina activa un mensaje de error con el texto ”Rendimiento
incorrecto”.
-“Densidad”
Esta es una función que tiene introducida la expresión de la variación de la
densidad con la altitud hasta 11000 m y devuelve el valor de la misma en kg/m3
dependiendo del valor de la altitud del dato de entrada que se indica en el argumento
“h”.
-“Temp”
Al igual que en el caso de la densidad, esta función contiene la expresión de la
variación de temperatura con la altitud y devuelve el valor de la misma en Kelvin en
función del dato de entrada “h”.
-“PotDisp”
Esta función calcula y devuelve el valor de la potencia disponible en W en
función de la velocidad en m/s que se le indique en el primer argumento. Para ello
necesita que se le introduzcan las celdas de la hoja “Ref.celdas” en las cuales se
encuentran los coeficientes para aproximar la curva de potencia disponible. Esto se
hace en los tres últimos argumentos.
-“PotNec”
Función que calcula y devuelve el valor de la potencia necesaria a una altitud y
peso que se le indique. El dato de la altitud se introduce indirectamente, pues el dato
que necesita, y con el que trabaja es el de la densidad en kg / m3 . El dato hay que
introducirlo en kg.
-“Cd”

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
14
Calcula el CD con el CL como dato de entrada y con los datos de la polar,
aunque estos últimos no hay que indicárselos, al leerlos la propia función de las celdas
correspondientes.
-“Cdcarr”
Calcula y devuelve el CD al introducirle como argumentos, el CL y los
coeficientes de la polar. Resulta útil cuando se necesita calcular el CD en alguna
configuración especial en la que se modifique la polar con respecto a la de crucero.
-“PotHelic”
Función que devuelve el valor de la potencia en CV que absorbe la hélice para
una condición de vuelo determinada que se indica a través de los argumentos Cp, ro
(densidad), d0 (diámetro de la hélice) y n (revoluciones por segundo de la hélice).
-“CsubL”
Devuelve el valor del CL que calcula a partir de los datos de peso (kg),
velocidad (m/s), densidad (kg/m3) y superficie alar (m2) que se introducen en los
argumentos.
-“NuAterr”
Devuelve el valor del coeficiente de rozamiento durante el último tramo del
aterrizaje dependiendo del tipo de pista que se haya elegido al principio del programa.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
15
6.3. Guía del usuario.
Antes de hacer una aplicación al programa para validar los resultados se va a
explicar paso a paso el proceso que hay que seguir para usar el programa.
El programa se entrega en un archivo Excel de nombre “ActuaHelice”. Para
empezar a usarlo hay que abrirlo y pinchar en “Habilitar macros” en la ventana que
aparecerá.
Figura 6.3.1 “Habilitar macros”
Se abrirá la ventana de Excel mostrando la primera hoja del libro llamada
“Datos” como vemos a continuación
Figura 6.3.2 Vista general hoja “Datos”

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
16
En ésta hoja rellenaremos las celdas en amarillo de la tabla A con los datos del
avión que se piden, y la tabla B en caso de que se quiera calcular la polar por el
método de Roskam. Si ya se dispone de los coeficientes de la polar, se rellenarán las
tablas C.
Acto seguido pincharemos sobre uno de los botones “Cálculo de la polar:
Roskam” o “Cálculo de la polar: método parábola” dependiendo del método que
hayamos elegido para calcular la polar. Aparecerá un cuadro de mensaje indicando la
ecuación de la polar y pulsaremos aceptar o la tecla “enter” del teclado. Veremos que
la tabla “Tabla polar” muestra valores de Cl y Cd y que la gráfica ha cambiado
mostrando la curva de la polar.
Si se conocen las ecuaciones de la polar en despegue y/o aterrizaje se
escribirán los coeficientes en las celdas correspondientes. Sino se conocen o no se
rellenan, el programa utilizará la polar en crucero tanto para despegue como para
aterrizaje.
Rellenaremos también las celdas indicando el tipo de pista de despegue y
aterrizaje. Datos imprescindibles para calcular las carreras puesto que de ellos
depende el coeficiente de rozamiento que se utilizará en los cálculos.
Una vez calculada la polar y rellenados todos los datos necesarios pinchamos
sobre la pestaña “Hélice” para abrir dicha hoja de cálculo y pasar al proceso de
adaptación de la hélice, o de introducción de los datos de la misma en caso de que se
dispusiera de una ya adaptada.
Figura 6.3.3 Pestaña hoja “Hélice”
Nos aparecerá una pantalla con la siguiente presentación:

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
17
Figura 6.3.4 Vista general hoja “Hélice”
Podemos apreciar como una línea negra divide la pantalla en dos partes. La
superior está dedicada al caso en que se disponga de una hélice ya adaptada y la
inferior es en la que se lleva a cabo la adaptación de la hélice a la condición que más
nos interese.
En caso de que ya dispongamos de una hélice rellenaremos las celdas
amarillas (A) con los datos que nos pide y pulsaremos sobre el botón “Validar
adaptación” señalado en la imagen. Nos aparecerá un mensaje indicando el Mach de
punta de pala en las condiciones que hayamos introducido y una vez que lo
aceptemos aparecerá otro mensaje aceptando como correcta la adaptación o dando
algún error. Si ocurre esto último será porque el Mach de punta de pala es superior a
0.85 en las condiciones de adaptación y por lo tanto no se da por válida la hélice por
superar los niveles de ruido aceptados.
Figura 6.3.5 Introducción de datos para hélice ya adaptada

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
18
Una vez que el programa haya verificado que todo está correcto estaríamos
listos para pasar a la siguiente hoja llamada “Actuaciones”
Si no disponemos de una hélice nos fijaremos en la parte inferior de la hoja,
que es la dedicada al proceso de adaptación de la hélice.
Rellenaremos los datos de las celdas amarillas (A) atendiendo al las
explicaciones dadas en los comentarios de las celdas y a los cuadros de texto, como
vemos en la imagen siguiente.
A continuación pulsaremos, en éste orden los siguientes botones: “Iniciar
adaptación” y “Estimar velocidad máxima”. Acto seguido veremos en la tabla de la
derecha una estimación de la velocidad máxima del avión a la altitud de adaptación
indicada.
Figura 6.3.6 Introducción de datos para adaptación de la hélice
Llegados a éste punto podemos elegir entre adaptar la hélice a velocidad
máxima y rendimiento óptimo o a velocidad máxima y rendimiento máxima. Si
queremos podemos hacer las dos adaptaciones para comparar los resultados y elegir
el más conveniente.
Para ello pulsaremos sobre uno o sobre los dos botones que veremos y que se
muestran en la imagen siguiente: “Adaptar a rendimiento óptimo” o “Adaptar a
rendimiento máximo”.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
19
Después de unos segundos de espera se presentarán en las tablas que vemos,
los resultados del tipo de adaptación que hayamos elegido para cinco valores del
rendimiento máximo que estarán entre los valores que hallamos indicado en las celdas
amarillas de la misma hoja.
Figura 6.3.7 Vista tablas adaptación a Vmáx
Si alguna de las opciones presentadas es de nuestra conveniencia la
seleccionaremos pinchando sobre el círculo en blanco en la parte superior de cada
columna de opción para marcarlo, como lo vemos que lo está la opción 4 de la
adaptación a rendimiento óptimo. El programa ya estaría listo para pasar a calcular las
actuaciones en la siguiente hoja, “Actuaciones”.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
20
Si nos interesa, podemos ver las curvas de potencia disponible y necesaria
resultantes de las adaptaciones a rendimiento óptimo en la hoja “Curvas potencia
Adap Rend Opt”, que tiene la siguiente apariencia:
Figura 6.3.8 Gráficas de curvas de potencia de adap.rend.opt
También se pueden ver las curvas resultantes de la adaptación a rendimiento
máximo en la hoja “Curvas potencia Adap Rend Max” como vemos a continuación.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
21
Figura 6.3.9 Gráficas de curvas de potencia de adap.rend.máx
Es previsible que ninguna de las opciones nos interese y queramos adaptar la
hélice a una velocidad algo inferior a la máxima. Nos iremos entonces a la parte
derecha de la hoja, donde veremos lo siguiente:
Figura 6.3.10 Vista tabla adaptación a V < Vmáx
Rellenaremos las celdas en amarillo con los datos que nos pide el programa y
pulsaremos el botón “Calcular” para iniciar la adaptación.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
22
Al igual que en los casos anteriores el programa nos presenta cinco opciones
con rendimientos entre el los extremos máximo y mínimo que indicamos
anteriormente. Marcaremos el que más nos interese.
AVISO: Para llevar a cabo la adaptación la adaptación a velocidad inferior a la máxima
antes habremos marcado alguna de las opciones de las adaptaciones anteriores, para
indicar al programa si la adaptación se hará a rendimiento óptimo o a rendimiento
máximo.
AVISO: La velocidad que indiquemos de adaptación deberá ser cercana a la de
adaptación a velocidad máxima, puesto que la base de datos del programa es limitada
y se corre el riesgo de que los datos disponibles en tablas dejen de ser válidos. En tal
caso, el fallo se hace evidente en los resultados.
Se pueden ver las curvas resultantes de la adaptación a velocidad inferior a la
máxima en la hoja “Curvas Adap V < Vmax” como se muestra en la siguiente imagen:
Figura 6.3.11 Gráficas de curvas de potencia adap V < Vmáx

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
23
Se ha pensado en la posibilidad de que no se disponga en el mercado de una
reductora que dé la relación de reducción que ha calculado el programa en alguna de
las adaptaciones hechas. Para solucionarlo se da la posibilidad de calcular una
adaptación partiendo del dato de una relación de reducción determinada.
Para hacer uso de ésta función del programa previamente indicaremos, como
de explicó anteriormente, la opción de adaptación que más se acerque a nuestras
expectativas y nos centraremos en la siguiente parte de la pantalla:
Figura 6.3.12 Vista tabla adap. reductora
Una vez que hayamos seleccionado la opción de los tres tipos de adaptación
que más se acerque a lo que buscamos, indicaremos en la celda amarilla el valor
máximo de la relación de reducción que queramos, teniendo en cuenta que el
programa presentará cinco opciones, cada una con un valor de la relación de
reducción entre el máximo indicado y 1.
Pulsaremos el botón “Recalcular” para iniciar el cálculo de las hélices y una vez
presentados los resultados marcaremos el que más satisfaga nuestras necesidades.
Si todavía no obtenemos buenos resultados sería conveniente ampliar la base de
datos del programa con las curvas de adaptación de otra hélice diferente.
AVISO: Se ha de intentar que la relación de reducción que se indique sea lo más
parecida posible a la de la opción de adaptación que hayamos marcado anteriormente.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
24
Antes de proceder a la siguiente hoja para el cálculo de actuaciones
marcaremos, como se explicó en los casos anteriores, la opción de adaptación que
más nos interese. Si una vez hecha la adaptación para una relación de reducción
determinada nos interesa más otra opción procedente de una de las tres adaptaciones
anteriores, marcaremos la opción de esa adaptación.
Ya podemos activar la hoja “Actuaciones” para proceder al cálculo de las
actuaciones del avión. Para ello pinchamos sobre la pestaña con el mismo nombre,
marcada con la flecha en la imagen.
Figura 6.3.13 Pestaña hoja “Actuaciones”
La hoja tiene la siguiente apariencia:
Figura 6.3.14 Vista general hoja “Actuaciones”
El proceso de cálculo empieza en la parte superior y se sigue hacia abajo, de
forma que lo primero que haremos será ampliar la pantalla lo necesario y fijarnos en la
parte superior izquierda de la pantalla, de forma podamos ver lo que se muestra en la
siguiente imagen.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
25
Figura 6.3.15 Vista “Techo aproximado”
A la derecha de la celda donde pone “Tipo adaptación:” estará indicado el tipo
de adaptación de la hélice que hicimos en la hoja anterior.
Lo primero que haremos en ésa hoja será pulsar el botón “Calcular techo
aprox” y al cabo de unos segundos veremos en la celda “C3” una aproximación algo
basta y siempre por debajo, al techo máximo del avión en metros.
Si bajamos un poco en la pantalla podremos ver cinco gráficas con sus tablas
de datos debajo, que muestran las potencias necesaria y disponible para cada una de
las cinco altitudes tomadas entre el techo máximo aproximado y el nivel del mar.
Seguramente nos ayudarán a comprender y predecir el comportamiento del avión.
En la siguiente imagen vemos una de las gráficas con sus tablas
correspondientes, aunque todavía sin datos. Corresponde a la altitud h2 y los datos
que se muestran son la curva de potencia necesaria, la curva de potencia disponible
aproximada mediante una parábola, y la curva resultante de unir los diez puntos de la
curva de potencia disponible teórica que usa el programa para aproximar la parábola.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
26
Figura 6.3.16 Gráficas potencia disponible para cada altitud
El siguiente y último paso es calcular todas las actuaciones del avión. Estas se
darán para cinco pesos distintos, y para las cinco altitudes calculadas anteriormente
dentro de cada peso.
En la siguiente imagen nos centramos en la primera tabla, correspondiente al
peso 1, peso mínimo y con un 20% de combustible.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
27
Figura 6.3.17 Tabla resultados actuaciones
Lo primero que haremos será indicar en la celda amarilla la posición de la
palanca de gases a la cual se quieren calcular las actuaciones, aunque las carreras de
aterrizaje y despegue se calculan al ralentí y con gases a fondo respectivamente e
independientemente de la posición de gases que indiquemos. Además vemos que
tienen unos intervalos de altitud predefinidos, que son los que pueden resultar de
interés.
Una vez indicada la posición de la palanca de gases pulsaremos el botón
“Calcular actuaciones” para iniciar el cálculo.
Este último proceso dura unos 30 segundos aproximadamente, dependiendo
de la configuración del avión elegida y de la capacidad del ordenador.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
28
Una vez terminado se presentan todos los resultados.
Si se quieren imprimir los resultados se recomienda copiar las tablas y gráficas
que interesen y pegarlas en la siguiente hoja “Resultados finales” que estará en
blanco. Así se pueden organizar para adaptar la hoja a tamaño A4 y se evita tener que
imprimir tablas innecesarias y que las que nos interesen queden partidas.
A continuación mostraremos las hojas en las que se encuentran las tablas con
los datos obtenidos de gráficas de adaptación de la hélice o de motores que usa el
programa en los cálculos.
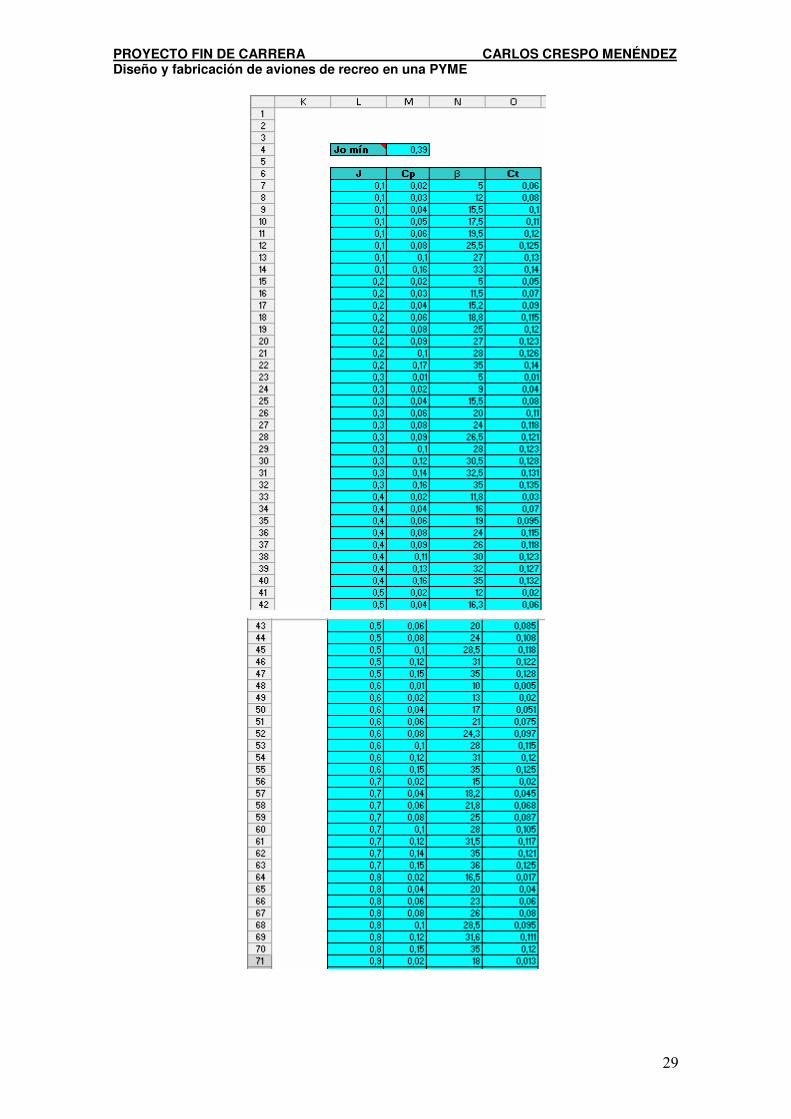
Las siguientes imágenes corresponden a la hoja “Curvas raf6” y proceden de la
discretización de los diagramas de adaptación de Weick como se explicará más
adelante.
Figura 6.3.18 Tablas de datos de adaptación de la hélice
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
29

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
30
Figura 6.3.19 Tablas de datos de curvas de Cp y Ct
Siguen en la siguiente página las tablas que se encuentran en las hojas
“Curvas Rotax 582 UL” (Izquierda) y “Curvas Rotax 503 2V” (Derecha)

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
31
Figura 6.3.20 Curvas rotax 582 UL Figura 6.3.21 Curvas rotas 503 2V

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
32
6.4. Entrada de datos.
Al introducir los datos, el programa los manda directamente a la hoja
“Ref.celdas”, que será donde las macros trabajen con ellos y a donde manden sus
resultados. Estos se envían desde las celdas de la hoja “Ref.celdas” a las celdas de la
hoja de presentación.
Al final del documento se muestra una tabla con las relaciones entre las celdas
de datos y resultados de las hojas de presentación y la hoja “Ref.celdas”
• Cálculo de la polar
Como se comentó anteriormente el cálculo de la polar lo llevan a cabo las
macros “MetodoParábola” o “MetodoRoskam”.
“MetodoParabola” es la más sencilla, puesto que solamente recoge los
coeficientes que se han introducido y los manda a la tabla con los coeficientes de la
polar.
“MetodoRoskam” calcula la polar mediante el método abreviado de Roskam
que explicaremos a continuación basándonos en la Referencia 1. Esta macro toma
automáticamente la polar en despegue y aterrizaje iguales a la de crucero.
Si se va a emplear este último método hay que tener en cuenta una serie de
limitaciones debidas a las curvas que se emplean y que se han obtenido de la
Referencia 3 (fig1). Estas limitaciones se recuerdan en el comentario de la celda “D4”
de la hoja “Datos” para la introducción de los datos y son:
• Para alas rectangulares el alargamiento debe estar comprendido entre 2.8 y
10.
• En alas con estrechamiento el alargamiento debe estar entre 2.4 y 20.
• El alargamiento no puede ser superior a 10 para fuselajes de tipo circular.
Los gráficos empleados son los siguientes:

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
33
Figura 6.4.1 Factores de Oswald
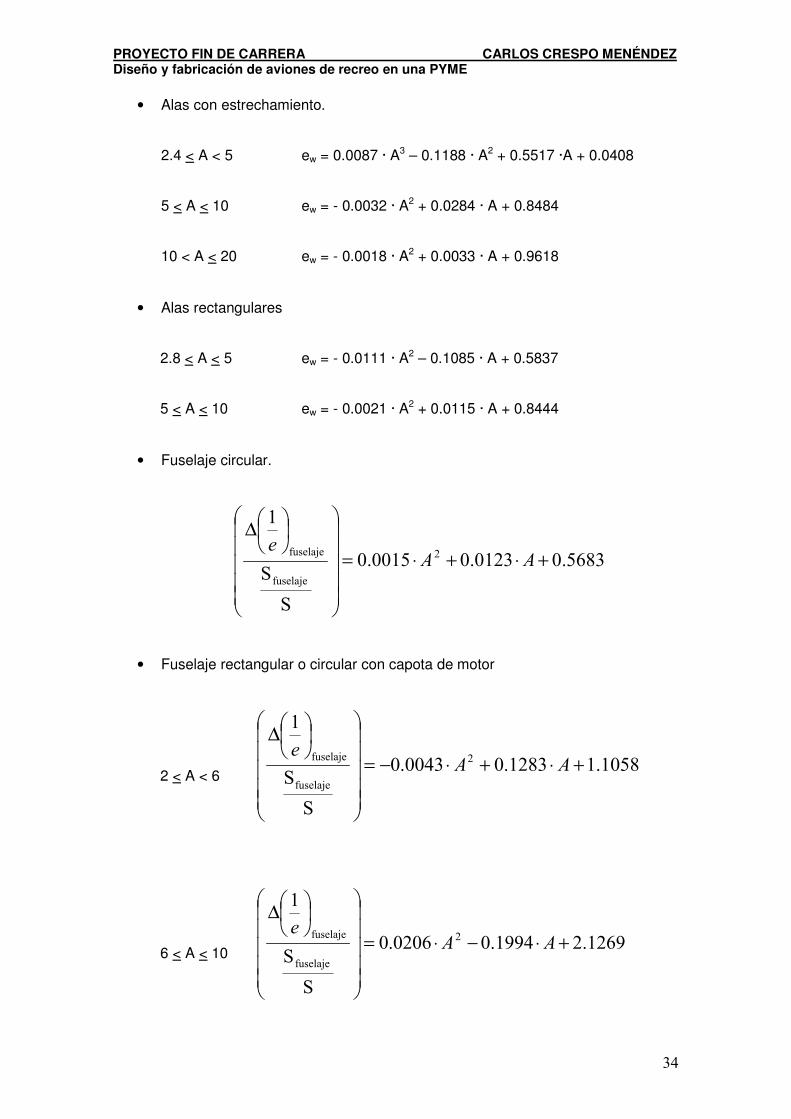
Las curvas se han aproximado por tramos de la siguiente forma:
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
34
• Alas con estrechamiento.
2.4 < A < 5 ew = 0.0087 · A3 – 0.1188 · A2 + 0.5517 ·A + 0.0408
5 < A < 10 ew = - 0.0032 · A2 + 0.0284 · A + 0.8484
10 < A < 20 ew = - 0.0018 · A2 + 0.0033 · A + 0.9618
• Alas rectangulares
2.8 < A < 5 ew = - 0.0111 · A2 – 0.1085 · A + 0.5837
5 < A < 10 ew = - 0.0021 · A2 + 0.0115 · A + 0.8444
• Fuselaje circular.
5683.00123.00015.0
S
S
1
2
fuselaje
fuselaje+⋅+⋅=
∆
AAe
• Fuselaje rectangular o circular con capota de motor
2 < A < 6 1058.11283.00043.0
S
S
1
2
fuselaje
fuselaje+⋅+⋅−=
∆
AAe
6 < A < 10 1269.21994.00206.0
S
S
1
2
fuselaje
fuselaje+⋅−⋅=
∆
AAe

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
35
6.5. Adaptación de la hélice.
Como sabemos, se denomina adaptación de una hélice al proceso mediante el
cual se llegan a obtener sus parámetros geométricos, los cuales van a permitir que el
funcionamiento del grupo motopropulsor sea tal que proporcione a la aeronave las
capacidades de vuelo más satisfactorias.
El método que sigue el programa para adaptar la hélice se ha basado el
diagrama de adaptación de Weick, que muestra la información experimental necesaria
para la adaptación de una familia de hélices. Actualmente el programa sólo dispone de
la información necesaria para la hélice bipala 5868-R6. Esta hélice es de madera y con
un perfil RAF 6.
Los Clark-Y y RAF 6 son dos tipos de perfiles que han sido muy utilizados. Los
ensayos demuestran que el Clark-Y tiene una resistencia mínima y una sustentación
máxima menores que el RAF 6. Esto indica que una hélice de paso fijo con perfil
Clark-Y debe ser mejor a velocidad de crucero y a velocidades grandes que en
despegue. Es decir, una hélice con un perfil Clark-Y está especialmente indicada
cuando la velocidad máxima o de crucero sea la condición de diseño, mientras que
para facilitar el despegue resulta más apropiada una hélice con un perfil RAF 6.
En concreto para nuestra hélice el diagrama de adaptación es el siguiente:

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
36
Figura 6.5.1 Gráfico de adaptación para la hélice 5868-R6 de dos palas
Los puntos de éste gráfico se encuentran en las dos tablas de la izquierda de la
hoja “Curvas RAF6”.
En el gráfico puede verse como el paso de hélice más bajo que aparece es de
15º. Con el fin de poder manejar valores más bajos, se extrapolaron curvas para pasos
de 5º y 10º.
Se ha hecho una modificación a las tablas existentes ya que en algún caso
había dos datos contiguos exactamente con el mismo valor. Esto causaba que en
algunos casos en los que se tomaban ambos datos iguales para llevar a cabo la
interpolación esta daba un resultado dividido por cero. Para solucionarlo ha sido
suficiente con añadir una milésima a los datos que eran iguales y contiguos en las
tablas.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
37
Las actuaciones del avión varían con diferentes hélices de igual forma
geométrica, si el diámetro y paso varían de forma que se conserve el mismo número
de revoluciones para velocidad máxima. Una sola combinación de diámetro y paso
dará la velocidad máxima más alta, otras combinaciones proporcionarán la mejor
velocidad de subida, despegue, etc.
La hélice elegida ha de absorber la potencia máxima del motor en la condición
de vuelo que nos sea más favorable, de ahí que se nos presenten dos situaciones
extremas:
a) Adaptar a velocidad máxima, lo que nos llevará a elegir una hélice con el
mayor rendimiento propulsivo posible a la velocidad máxima de vuelo.
b) Adaptar a velocidad de despegue, velocidad de subida óptima o velocidad
de subida máxima, con lo cual tendremos una hélice que nos proporcionará
una carrera de despegue y un régimen de subida satisfactorios.
Entre estas dos situaciones límite habrá que encontrar una solucion de
compromiso, que suele estar en tomar una hélice que sacrificando lo menor posible la
velocidad de crucero proporcione una carrera de despegue y una velocidad de subida
adecuadas.
• Hélice ya adaptada
En éste caso, con los datos que se introducen en las celdas amarillas se
calculan en la misma hoja la densidad y temperatura a la altitud de adaptación.
También se calculan el parámetro de avance en las condiciones de adaptación J, el
coeficiente de velocidad-potencia Cs y las rpm del motor en las mismas condiciones
basándose en las siguientes ecuaciones:
Dn
VJ
⋅=
5
1
2nPV Cs
⋅⋅=
ρ RR rpmHélice rpmMot ⋅=
Donde:
� V es la velocidad de adaptación introducida
� ρ es la densidad a la altitud de adaptación

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
38
� n es el número de revoluciones por segundo de la hélice
� P es la potencia del motor a la altitud de adaptación en W
� RR la relación de reducción.
Los datos calculados se mandan a la hoja “Ref.celdas”. Al final de éste
documento se muestra una tabla con las relaciones entre las celdas de las hojas de
presentación y sus referencias en la hoja “Ref.celdas” y con la dirección del tránsito de
los datos.
La macro “ComprobAdapt” toma los datos que se han referido a la hoja
“Ref.celdas” y calcula el mach de punta de pala en las condiciones de adaptación. Si
éste es menor que 0.85 activa un mensaje diciendo que todo está correcto, pero si el
Mach es mayor a 0.85 se considera que la adaptación es incorrecta y se activa un
mensaje advirtiéndolo.
Al activar la macro pulsando el botón “Validar adaptación” el programa manda
los datos introducidos y los calculados a una tabla en la hoja “Ref.celdas” que se
utilizará en las operaciones que se realicen durante el cálculo de actuaciones.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
39
• Introducción de los datos de adaptación de la hélice
Al igual que en los apartados anteriores, al introducir los datos éstos se envían
automáticamente a las celdas asignadas en la hoja “Ref.celdas”. Se pueden ver las
relaciones entre las celdas en la tabla adjunta al final del documento.
La macro “Comprob datos” se encarga de comprobar que en caso de que se
haya elegido una hélice de madera, ésta sea de dos palas. Es importante en el caso
de que se calcule la carrera de despegue por el método del Report NACA 450, por las
limitaciones en las curvas que se usan.
• Adaptación a velocidad máxima
Como datos de partida se toman: la altitud de adaptación, la potencia al freno
corregida con la altitud, las rpm del motor a esa potencia, el rendimiento propulsivo
máximo (conviene comenzar introduciendo el valor máximo posible que permitan las
tablas), el peso y la superficie alar.
El primer paso es estimar la velocidad máxima de vuelo. Para ello igualamos la
potencia disponible (Pd = Pfreno corregida con la altitud · ηmáximo) con la necesaria (Pn = D · V),
función como vemos de la velocidad.
Con el fin de que la velocidad obtenida sea la máxima en cualquier situación, el
CL se calcula empleando el peso mínimo. La potencia necesaria aumenta con el peso
para una velocidad de vuelo dada, mientras que la potencia disponible no se modifica.
Si se adaptase empleando un peso superior al mínimo, la velocidad máxima
conseguida sería siempre inferior a la obtenida cuando se emplea el peso mínimo.
Este proceso se realiza en la macro “EstimaVeloc”, siguiendo una secuencia
iterativa que consiste en comparar las potencias necesaria y disponible para una
velocidad de partida de 1 m/s, e ir aumentando la velocidad en incrementos de 10 m/s
hasta que la potencia necesaria supere a la disponible y entonces reducir los
incrementos de velocidad y ajustarla hasta que la diferencia entre las dos potencias
sea menor a un valor llamado precisión y que se ha establecido en 0.01 CV.
Hecho esto el programa ya está en disposición de poder emplear el gráfico de
adaptación que se mostraba en la figura 2. y que relaciona el rendimiento propulsivo
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
40
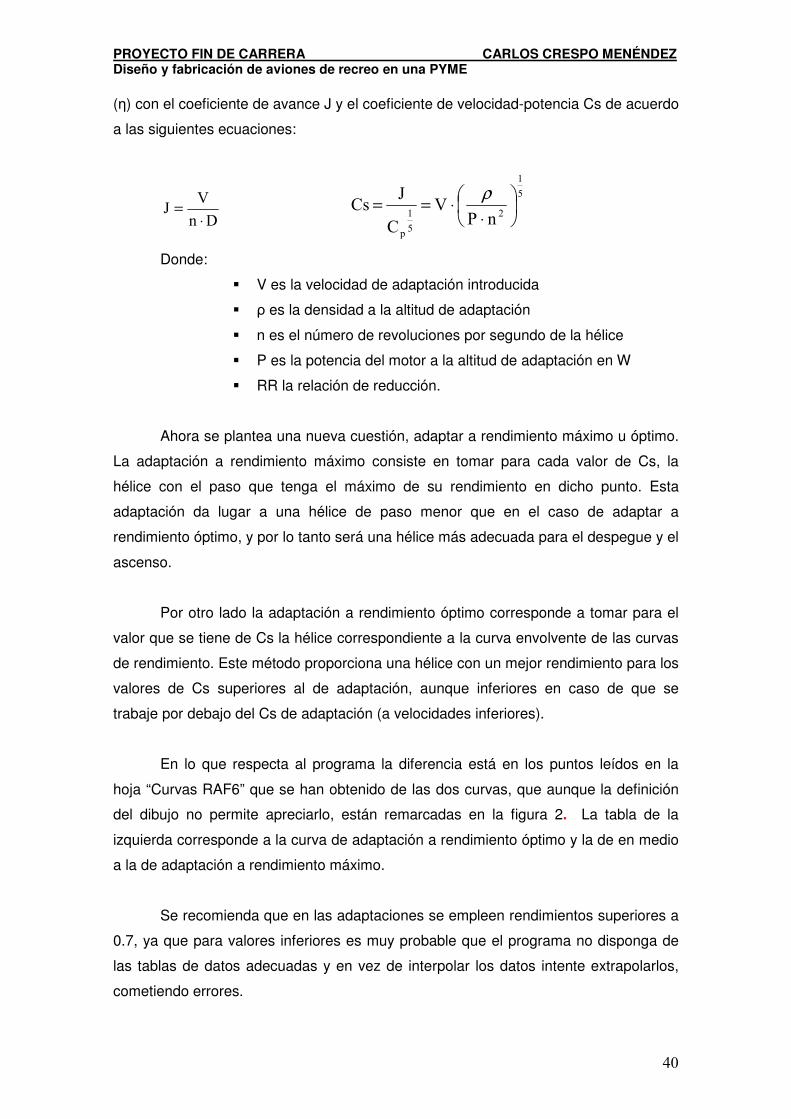
(η) con el coeficiente de avance J y el coeficiente de velocidad-potencia Cs de acuerdo
a las siguientes ecuaciones:
Dn
VJ
⋅=
5
1
2
5
1
p
nPV
C
J Cs
⋅⋅==
ρ
Donde:
� V es la velocidad de adaptación introducida
� ρ es la densidad a la altitud de adaptación
� n es el número de revoluciones por segundo de la hélice
� P es la potencia del motor a la altitud de adaptación en W
� RR la relación de reducción.
Ahora se plantea una nueva cuestión, adaptar a rendimiento máximo u óptimo.
La adaptación a rendimiento máximo consiste en tomar para cada valor de Cs, la
hélice con el paso que tenga el máximo de su rendimiento en dicho punto. Esta
adaptación da lugar a una hélice de paso menor que en el caso de adaptar a
rendimiento óptimo, y por lo tanto será una hélice más adecuada para el despegue y el
ascenso.
Por otro lado la adaptación a rendimiento óptimo corresponde a tomar para el
valor que se tiene de Cs la hélice correspondiente a la curva envolvente de las curvas
de rendimiento. Este método proporciona una hélice con un mejor rendimiento para los
valores de Cs superiores al de adaptación, aunque inferiores en caso de que se
trabaje por debajo del Cs de adaptación (a velocidades inferiores).
En lo que respecta al programa la diferencia está en los puntos leídos en la
hoja “Curvas RAF6” que se han obtenido de las dos curvas, que aunque la definición
del dibujo no permite apreciarlo, están remarcadas en la figura 2. La tabla de la
izquierda corresponde a la curva de adaptación a rendimiento óptimo y la de en medio
a la de adaptación a rendimiento máximo.
Se recomienda que en las adaptaciones se empleen rendimientos superiores a
0.7, ya que para valores inferiores es muy probable que el programa no disponga de
las tablas de datos adecuadas y en vez de interpolar los datos intente extrapolarlos,
cometiendo errores.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
41
o Adaptación a rendimiento óptimo
La adaptación a rendimiento óptimo está controlada por la macro
“AdaptRendOpt”.
Lo primero que hace es tomar los datos de altitud de adaptación y rendimientos
máximo y mínimo para calcular los rendimientos intermedios a los que se adaptará la
hélice.
A continuación llama a la macro “Adapta”, que se encarga de obtener los
parámetros J, β y Cs utilizando la tabla de adaptación a rendimiento óptimo de la hoja
“Curvas RAF6”. Lo primero que hace es entrar en la tabla con el rendimiento que le
indica la macro “AdaptRendOpt”, como si en la gráfica trazásemos una recta horizontal
con el valor del rendimiento, de izquierda a derecha buscando el punto de corte con la
curva de adaptación a rendimiento óptimo. El programa parte de la primera celda por
arriba de la columna de rendimientos y compara su valor con el que se le ha indicado
anteriormente, y desciende una celda cada vez hasta que el valor de la misma supere
o sea igual al indicado. Entonces se va a las columnas de Cs, B y J y mediante la
interpolación con cuatro puntos circundantes al de corte y con el rendimiento como
dato de referencia, calcula los valores de dichos parámetros.
Con los datos que hasta ahora se tienen, es posible despejar las revoluciones
por segundo de la hélice (n) de la expresión que nos da Cs, y el diámetro de la
expresión de J.
En principio, la adaptación se podría dar por concluida llegados a éste punto.
Sin embargo, con el fin de disponer de una mayor información previa al cálculo de
actuaciones y facilitar la elección de la hélice, también se presentan en la misma tabla
de resultados, las velocidades máxima y mínima de vuelo por tracción, la velocidad de
subida máxima y la carrera de despegue. Todos estos datos obtenidos para el peso
máximo, a nivel del mar y con una posición de palanca de gases al 100%.
Para calcular estos valores en primer lugar hay que conocer la curva de
potencia disponible. Se encarga de ello la macro “CurvaPd”, cuya explicación se
encuentra al final de éste apartado.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
42
Una vez conocida la curva de potencia disponible el programa llama a la macro
“ActuacsPrevias” para que calcule las actuaciones de las que hablábamos antes.
Lo primero que calcula es la velocidad de pérdida, que es la que corresponde
al CL máximo en crucero. A continuación, la velocidad mínima por tracción, obtenida
mediante un proceso iterativo que va aumentando la velocidad desde 0.5 m/s con
incrementos de 1 m/s hasta conseguir que la potencia necesaria y la disponible se
diferencien en menos de 0.01 CV. Lo que se consigue es calcular la velocidad
correspondiente al punto donde la potencia necesaria deja de ser mayor que la
disponible. Se usa el mismo procedimiento para calcular la velocidad máxima por
tracción, solo que partiendo de 1,2 veces la velocidad mínima por tracción.
A continuación se calcula la velocidad subida óptima, aunque no se presenta
en pantalla, haciendo máximo el seno del ángulo de subida, que es el cociente entre la
velocidad de subida (que como sabemos es el exceso de potencia disponible con
respecto a la necesaria dividido entre el peso) y la velocidad de vuelo. Posteriormente
se calcula la velocidad de subida máxima, aumentando la velocidad e iterando hasta
conseguir que la velocidad de subida sea la máxima posible.
El siguiente cálculo que se hace es el de la carrera de despegue, que se
realiza a nivel del mar y con gases al 100%. Antes de empezar los cálculos se recogen
los datos de la polar en despegue, que si no se ha indicado lo contrario, son los de la
polar en crucero por defecto.
La carrera se calcula por tramos y luego se suma la distancia de cada uno.
Cada uno de los tramos se explicará con mayor detalle en el apartado “Carreras de
aterrizaje y despegue”. De momento comentaremos simplemente que este cálculo es
una aproximación muy simple y con ecuaciones que se han obtenido de plantear el
sumatorio de fuerzas en cada tramo del despegue, que es una de las actuaciones en
las que más error se comete al simplificar los cálculos y que por lo tanto tendremos
que contar con un margen de error muy generoso, en torno al 20%.
Hecho esto los resultados se presentan en pantalla junto con el valor de la
relación de reducción y el Mach de punta de pala. Este valor del Mach deberá ser
inferior a 0.85 para considerar que la adaptación es satisfactoria, ya que para valores
mayores el rendimiento de la hélice cae rápidamente y por otro lado se exceden los
niveles de ruido permitidos.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
43
-“CurvaPd”: Cálculo de la curva de potencia disponible
El cálculo de la curva de potencia disponible es una de las operaciones que
más se repite en todo el programa. Es por ello por lo que se le ha dedicado un
apartado a este tema.
Como se dijo anteriormente se encarga de ello la macro “CurvaPd”, que se
basa en el siguiente razonamiento:
Con un valor del parámetro J y el paso (β) de adaptación es posible determinar
los coeficientes de tracción (CT) y de potencia (CP), operación que lleva a cabo la
macro “CalculaCp” mediante el empleo de la tabla de la derecha de la hoja “Curvas
RAF6”, que se ha obtenido del gráfico de las curvas del coeficiente de potencia que se
muestra en la figura 3, y del cual se han modificado las extrapolaciones en las zonas
de trabajo de bajos Cs que se habían hecho en el trabajo anterior basándonos en la
comparación con otros gráficos similares que encontramos en la Referencia 4.
Figura 6.5.2 Curvas del coeficiente de potencia para la hélice 5868-R6 de dos
palas
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
44
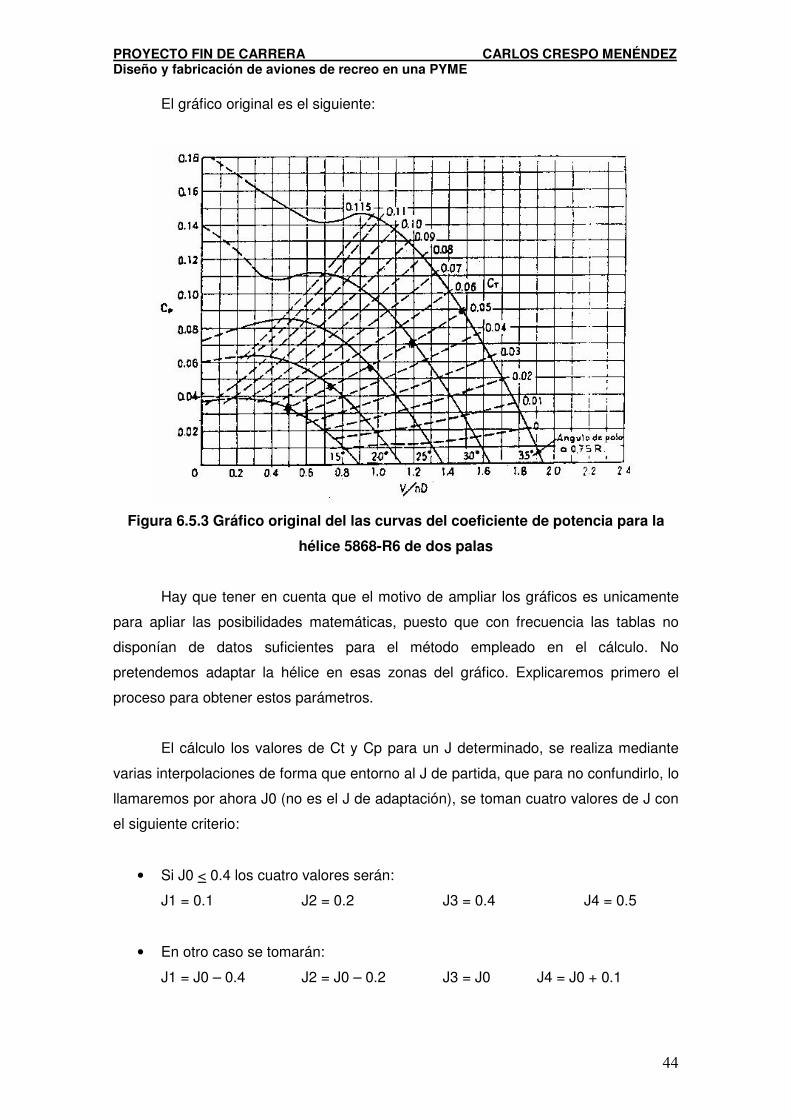
El gráfico original es el siguiente:
Figura 6.5.3 Gráfico original del las curvas del coeficiente de potencia para la
hélice 5868-R6 de dos palas
Hay que tener en cuenta que el motivo de ampliar los gráficos es unicamente
para apliar las posibilidades matemáticas, puesto que con frecuencia las tablas no
disponían de datos suficientes para el método empleado en el cálculo. No
pretendemos adaptar la hélice en esas zonas del gráfico. Explicaremos primero el
proceso para obtener estos parámetros.
El cálculo los valores de Ct y Cp para un J determinado, se realiza mediante
varias interpolaciones de forma que entorno al J de partida, que para no confundirlo, lo
llamaremos por ahora J0 (no es el J de adaptación), se toman cuatro valores de J con
el siguiente criterio:
• Si J0 < 0.4 los cuatro valores serán:
J1 = 0.1 J2 = 0.2 J3 = 0.4 J4 = 0.5
• En otro caso se tomarán:
J1 = J0 – 0.4 J2 = J0 – 0.2 J3 = J0 J4 = J0 + 0.1

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
45
En el programa J1, J2, J3 y J4 se llaman L1, L2, L3 y L4 respectivamente, para
evitar confusiones durante la programación.
Para cada uno de los datos anteriores se calculan los valores de CT y CP
entrando en las tablas con el valor del J (L) que corresponda y tomando cuatro puntos
contiguos de las tablas, que correspondan a ese J y de forma que el β de adaptación
quede dentro del intervalo de los β correspondientes a los cuatro puntos para a
continuación calcular los valores de CT y CP interpolando con los correspondientes a
esos cuatro puntos que se sitúan alrededor del de cálculo y usando como dato de
entrada el valor de β de adaptación.
La siguiente figura tiene como objetivo aclarar la explicación anterior. En ella
vemos como ejemplo que se ha tomado J = 0.3. Vemos como entra en el gráfico
tomando cuatro puntos correspondientes a cuatro CP. Pero supongamos que el β de
adaptación es 20º. Como vemos la curva correspondiente a este paso no pasa entre
los cuatro puntos elegidos para el J en cuestión. De continuar así, al intentar interpolar
entre los cuatro puntos con el β como dato de entrada para hallar CT, vemos
claramente como lo que realiza el programa es una extrapolación, con lo cual obtiene
un dato muy alejado del correcto.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
46
Figura 6.5.4 Entrada en la tabla de coeficientes de tracción y potencia con J = 0.3
Para evitar el problema que estamos comentando, cada vez que el programa
entra las tablas y obtiene los cuatro puntos se comprueba si la curva del β de
adaptación pasa entre ellos. Basta con que al menos el punto superior esté por
encima. No hay riesgo de que se quede fuera por abajo porque el programa siempre
empieza tomando el valor mínimo de CP.
En caso de que la curva pase por encima de estos puntos se toman otros
cuatro, un valor por encima, es decir todos suben al siguiente punto disponible en las
tablas como vemos en la figura 5.5.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
47
Figura 6.5.5 Entrada en la tabla de coeficiente de tracción y potencia con J=0.3
Vemos como ahora la curva de β = 20º si está entre los puntos, con lo cual el
programa realizará una interpolación correcta.
Con las extrapolaciones llevadas a cabo en los gráficos se ha evitado en gran
medida, pero aún así cabe la posibilidad de que en algún caso concreto con un ángulo
de paso muy elevado y un J muy bajo, no se dispongan datos en las tablas. Si esto
ocurriese, como pasaba antes de modificar las tablas, se cambia el valor de J por uno
mayor, como vemos en las figuras siguientes:

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
48
Figura 6.5.6 Ejemplo de falta de datos para L1
Figura 6.5.7 Ejemplo de falta de datos para L1

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
49
El problema de este método es que se podía dar el caso de que algunos
valores de J (L) de los cuatro tomados al principio, fuesen iguales, con lo cual, como
pasaba en el caso de la adaptación de la hélice, al interpolar sale un resultado dividido
por cero. Para evitar esto se introdujo al final de la macro, antes de la interpolación
final, un apartado de comprobación de que los cuatro J (L) fuesen distintos, y en caso
de que hubiera dos o tres iguales se volvían a tomar pero todos desplazados un punto
hacia la derecha. Como se ha dicho, al modificar los gráficos se evitó en gran medida
este problema, y las comprobaciones de la macro no son necesarias nada más que en
casos extremos.
Repitiendo este procedimiento obtenemos los valores de CT y CP para L1, L2,
L3 y L4, que como hemos comentado, son cuatro valores de J alrededor del J0, que es
para el cual queremos calcular CT y CP.
Llegados a éste punto calcularemos CT mediante la interpolación con cuatro
puntos que son los CT calculados anteriormente para los cuatro J y con J0 como dato
de entrada. Para calcular CP haremos lo mismo.
Una vez calculados CT y CP correspondientes al parámetro del que hablábamos
al principio de este apartado, continuamos con el cálculo de la potencia disponible.
En previsión de que no se disponga de la curva de potencia del motor se ha
programado el cálculo de la curva de potencia disponible según el procedimiento dado
por Nelson (Referencia 4.) calculando el rendimiento, la potencia disponible y las
revoluciones de la hélice:
JC
C
P
T ⋅=η Pd = η · Pfreno · σ1.305 · K
P
Po0.305
C
C K ⋅= σ
n = K · nadaptación
Donde CPo es el valor del coeficiente de potencia para el J de adaptación y n
son las revoluciones por segundo de la hélice.
Con estos datos se despeja la velocidad: V = J · n · D

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
50
Ya tenemos una pareja de datos de velocidad y potencia disponible, es decir,
un punto de la curva de potencia disponible la cual se va a aproximar por un polinomio
de segundo grado de la forma una vez que obtengamos tres puntos significativos de
esa curva.
Pd = APd · V2 + BPd · V + CPd
La curva de potencia disponible no posee una expresión matemática conocida
que pueda emplearse de una forma generalizada, sino que depende en gran medida
del grupo motopropulsor. Sin embargo si está claro que dicha curva, en el rango de
velocidades que nos interesa, es decir, entre la velocidad máxima de vuelo y la mínima
para cada altitud, presenta un máximo relativo. Si nuestra hélice ha sido adaptada a
velocidad máxima este máximo relativo se presenta en el entorno de la velocidad
máxima de vuelo. Pero si la adaptación se ha hecho a una velocidad inferior a la
máxima, es en el entorno de esa velocidad donde encontramos el valor máximo de la
potencia.
Para generar la curva de potencia disponible se toman 10 valores de J, que
corresponden a 10 valores diferentes de la velocidad de vuelo, comprendidos entre un
valor máximo correspondiente al J que se traía de la adaptación de la hélice
incrementado en 0.1 y un valor mínimo que se ha fijado en 0.39. De esta forma nos
aseguramos poder localizar el máximo relativo de la función, ya que los coeficientes
del polinomio correspondiente se determinan empleando tres puntos: el máximo
relativo, que se obtendrá en el entorno de la velocidad de adaptación; un punto a su
derecha, es decir, para una velocidad mayor correspondiente a J = J0 + 0.1 y otro
punto a su izquierda para una velocidad inferior que corresponde a J = 0.39 y que será
la mínima velocidad a la que se calcule.
Si ocurriera que el valor de J de adaptación (J0) fuese inferior a 0.39, está
previsto que en dicho caso el rango de valores de J vaya desde 0.39 hasta el valore de
J incrementado en 0.18.
Se puede observar que no siempre la curva aproximada por éste método se
cierne a la que forman los 10 puntos calculados. Sería conveniente de cara a futuras
modificaciones estudiar otro método de obtención de la curva aproximada para que
reproduzca más fielmente la curva calculada por puntos.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
51
El cálculo de los coeficientes de la curva de potencia disponible, APd, BPd y CPd
una vez obtenidos los tres puntos de la curva, se realiza en la misma macro “CurvaPd”
en la subrutina “coeficientes” y consiste en tres fórmulas que se han obtenido al
plantear un sistema de tres ecuaciones y despejar los tres coeficientes por el método
de Gauss:
APd · V12 + Bpd · V1 + CPd = Pd1
APd · V22 + Bpd · V2 + CPd = Pd2
P
Operamos:
APd · V12 + Bpd · V1 + CPd = Pd1
APd·(V22 – V12) + BPd·(V2 – V1) = Pd2 – Pd1
APd·[(V32 – V1
2)·
−
−
13
12
V V
V V-(V2
2 – V12)] = [(Pd3 – Pd1)·
− 13
12
V V
V - V- (Pd2 – Pd1)]
Sustituyendo y despejando los coeficientes obtenemos las fórmulas que se han
introducido en el programa:
( ) ( )
( ) ( )
−−
−
−−
−−
−
−−
=2
1
2
2
13
122
1
2
3
d1d2
13
12
d1d3
Pd
VVV V
V VVV
PPV V
V VP P
A
( ) ( )( )
−
−−−=
12
2
1
2
2Pdd1d2
PdVV
VVAPPB
CPd = Pd1 – AV12 – BV1
A parte de las modificaciones hechas en las curvas de los coeficientes de
tracción y potencia, en la tabla de datos se han añadido más puntos en casos de β

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
52
altos y J bajos para evitar que el programa extrapole los resultados y obtenga datos
poco fiables o absurdos. También se han añadido puntos en los casos de J más
elevados porque se necesitan al menos cuatro puntos para cada J para que el
programa funcione correctamente.
El método descrito hasta ahora es, como se ha dicho el propuesto por Nelson y
es un método aproximado que usa el programa cuando no se dispone de la curva de
potencia del motor. También se incorpora otro procedimiento más preciso para los
casos en los que si se disponga de dichas curvas. Consiste en que con los datos de
potencia en función de las rpm el motor y la expresión de la potencia absorbida por la
hélice:
P = CP · ρ · n3 · D5
tratar de encontrar mediante un proceso iterativo el valor de n (revoluciones por
segundo de la hélice) para el cual la potencia que proporciona el motor es la misma
que absorbe la hélice.
Se ofrecen así dos posibilidades con e fin de que no sea imprescindible
disponer de la curva de potencia del motor.
Este proceso se lleva a cabo en la subrutina “Padapt” y con el valor de “n” de la
hélice obtenido, que pasa a llamarse “n0”, se calcula V y la potencia mediante
aplicación directa de las siguientes expresiones:
V = J · n0 · D Pd = η · Pmotor · Nºmotores
A continuación se genera de forma similar a la descrita la curva de potencia
disponible para cada altitud al emplear el mismo intervalo de valores de J que en el
caso anterior.
La iteración que comentábamos comienza con un valor de n de la hélice que se
encuentra equidistante entre las revoluciones del motor para las que se obtiene la
potencia máxima y las revoluciones mínimas del motor. Se compara entonces la
potencia absorbida por la hélice con la proporcionada por el motor. Si la potencia que
proporciona el mayor es mayor que la que absorbe la hélice se incrementa n,
moviéndonos hacia la derecha en la curva de potencia del motor. En caso contrario se

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
53
reduce n para movernos hacia la izquierda y disminuir la potencia que puede
desarrollar el motor. Los incrementos de n de la hélice están siempre en función de
los empleados en la generación del la tabla que contiene los datos de la curva de
potencia del motor, haciendo intervenir la relación de reducción empleada. La
precisión se ha fijado en 0.1 CV, pues se ha visto que de esta forma se consiguen
buenos resultados.
Este procedimiento si bien es más exacto, también supone un aumento
considerable del tiempo invertido en el cálculo.
o Adaptación a rendimiento máximo
Para la adaptación a rendimiento máximo el programa se rige por la macro
“AdaptRendOpt”, que sigue exactamente el mismo procedimiento que en el caso de
adaptación a rendimiento óptimo con la única salvedad de que los datos de adaptación
de la hélice que va a leer para calcular los parámetros geométricos proceden de la
tabla de en medio, con el título “Rend máx”, en lugar de la de la izquierda como en el
caso anterior.
El cálculo de la curva de potencia disponible sigue exactamente el mismo
procedimiento y usa las mismas tablas de datos.
• Adaptación a velocidad inferior a la máxima
Así como en el proceso de adaptación a velocidad máxima buscábamos una
hélice que en la situación de vuelo a máxima velocidad nos proporcione el máximo
rendimiento propulsivo cuando nos encontramos con el motor a máxima potencia, en
el caso de adaptar a una velocidad inferior buscábamos una hélice que a dicha
velocidad nos proporcione también el máximo rendimiento propulsivo con el motor en
su régimen de potencia máxima.
El programa funciona de forma que una vez adaptada una hélice a velocidad
máxima y calculadas las actuaciones, se da la posibilidad de adaptar la hélice a una
velocidad inferior por si permitiera mejorar la carrera de despegue y el régimen de
ascenso. En este caso el programa necesita saber que tipo de adaptación emplear, a
rendimiento máximo u óptimo, es por ello que este apartado se realiza después de

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
54
haber adaptado una hélice a velocidad máxima y haber indicado que tipo de
adaptación es más interesante.
La macro que se encarga de esta adaptación es “Vinferior”, que toma como
datos de partida la altitud de adaptación h, la velocidad de adaptación VA y la potencia
al freno del motor.
Se piden, en la tabla de adaptación a velocidad inferior a la máxima, unos
valores de rendimiento que van a permitir establecer un intervalo de rendimientos con
cuyos valores se van a realizar los cálculos. Sin embargo el extremo superior no
puede ser cualquiera, se recomienda que se tome el valor que se obtuvo de la
adaptación a velocidad máxima. La razón de ello es que no tiene sentido emplear
rendimientos mayores puesto que los diámetros que necesitamos son también
mayores. Además el paso es también mayor, cuando si queremos mejorar el
despegue y/o la velocidad de ascenso necesitamos pasos menores a los obtenidos al
adaptar a velocidad de vuelo máxima. Por lo tanto la tendencia es utilizar un
rendimiento igual o inferior al que ya traíamos de la adaptación a velocidad máxima. Al
igual que en el caso de adaptación de la hélice a velocidad máxima, se recomienda
emplear rendimientos iguales o superiores a 0.7.
Se establecen así cinco rendimientos en orden creciente. Para cada uno de
ellos se determinan los valores de J, Cs y β de la misma forma que se hizo antes.
Como ya hemos comentado, si la adaptación anterior se había hecho para rendimiento
máximo, ahora se hará también a rendimiento máximo y viceversa.
De la expresión ya conocida para Cs se puede despejar el valor de las
revoluciones de la hélice ya que todos los demás parámetros de dicha expresión son
conocidos. Y con este dato se obtiene el diámetro de nuestra hélice al emplear la
expresión de J.
También se presenta la relación de reducción que hay que emplear, ya que
conocemos las revoluciones del motor para potencia máxima, y las mismas
actuaciones de antes calculadas por la misma subrutina: “ActuacsPrevias”. Se
establece también la limitación por Mach de punta de pala, tendiendo que ser inferior a
0.85 para aceptar la adaptación de la hélice.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
55
Una vez que ha concluido el proceso para el primer rendimiento tomado, se
procede de igual forma con los demás hasta llegar al último.
Cuando se considera que un rendimiento es adecuado, al seleccionarlo, se
manda la información de la adaptación a la hoja “Ref.celdas” para continuar con el
cálculo de actuaciones o con el cálculo de la reductora.
• Adaptación en función de la reductora disponible
Elegida la hélice podría ocurrir que no se pueda disponer de la relación de
reducción requerida. Para ello se ha creado esta opción.
En la tabla de este apartado se pide el valor de la relación de reducción
requerida, que se copia automáticamente a la celda correspondiente de la hoja
“Ref.celdas”.
Al seleccionar cualquiera de las opciones de adaptación que se hayan
calculado, ya sea a velocidad máxima o a velocidad inferior a la máxima, se mandan
los datos del tipo de adaptación (rendimiento óptimo manda la clave “opt” y
rendimiento máximo “max”) y el valor del rendimiento al apartado “Reductora” de la
hoja “Ref.celdas”.
Al arrancar la macro pulsando el botón “Recalcular” lo primero que hace el
programa es generar cinco relaciones de reducción, que van desde el valor introducido
por el usuario hasta uno, ambos incluidos. Para todas ellas se presentarán los datos
de la adaptación en la tabla de presentación de resultados en la hoja “Hélice”, aunque
en este apartado ya no aparecerá ningún dato referente a las actuaciones.
Al conocerse la relación de reducción y las r.p.m. del motor, se hace inmediato
el cálculo de las revoluciones por segundo de la hélice. El rendimiento de partida para
cada relación de reducción se toma como el obtenido para la hélice que anteriormente
hemos adaptado y con él y la potencia al freno se conocerá la potencia disponible.
Mediante un proceso iterativo llevado a cabo en la macro “EstimaVeloc2” que va
comparando la potencia disponible ya calculada con la necesaria para cada velocidad
hasta que las potencias difieran en 0.01 CV o menos, se calcula la velocidad máxima
de vuelo.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
56
Ahora ya es posible conocer Cs, al que el programa llamará Cs0, a partir de la
expresión usada en los apartados anteriores y entrando con su valor en la tabla de
adaptación correspondiente dependiendo de si es a rendimiento máximo u óptimo, se
obtienen J, β y un valor del rendimiento. Este rendimiento se compara al final de la
macro con el inicialmente empleado y si la diferencia entre ambos es superior a 0.001,
los resultados no se consideran válidos y el proceso volverá a repetirse, pero ahora
empleando como valor del rendimiento este último rendimiento obtenido. Así hasta que
la diferencia sea igual o inferior a 0.001. Cuando se cumpla esta condición se enviarán
los resultados a la tabla correspondiente de la hoja “Ref.celdas” y esta a su vez los
mandará a la tabla de la hoja “Hélice” para la presentación de los mismos. En este
momento se puede comprobar si la relación de reducción elegida es adecuada, o
seleccionar otra y repetir el proceso de cálculo. En caso de que se elija alguna de las
opciones el programa manda los datos de la adaptación al apartado “Actuaciones” de
la hoja “Ref.celdas” para prepararse para iniciar el cálculo de actuaciones.
Podrá verse como muchos de los resultados no nos interesan, pues nos llevan
a tener rendimientos muy inferiores al inicialmente tomado, conforme la relación de
reducción se aleja del valor de adaptación. Es por lo tanto recomendable emplear una
relación de reducción próxima al valor obtenido al adaptar la hélice.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
57
6.6. Cálculo de actuaciones.
Podemos considerarlo como el tercero y ultimo de los módulos que integran el
programa. Todo el proceso se lleva a cabo en la hoja “Actuaciones”, y no varía para
cualquiera de los métodos empleados anteriormente al adaptar la hélice o para el caso
de que ya se disponga de una hélice adaptada.
En primer lugar se obtiene de forma aproximada el techo del avión para el peso
máximo, para después generar entre dicho techo y el nivel del mar, cuatro intervalos
de altitudes de forma que los cinco niveles de vuelo resultantes serán los empleados
para los cálculos siguientes.
• Cálculo del techo aproximado
Los cálculos se llevan a cabo en la macro “TechoAprox” al activarla pulsando el
botón “Calcular techo aprox”. El techo se obtiene por comparación de la potencia
disponible con la necesaria para cada altitud. Incrementando progresivamente la
velocidad, se busca la altitud a la cual la potencia necesaria sea mayor que la
disponible para cualquier velocidad, o bien se alcance el Mach crítico. Si para una
velocidad y altitud dadas la potencia disponible es menor que la necesaria (nos
encontramos con velocidades bajas) se incrementa progresivamente la velocidad TAS
con incrementos de 5 m/s, hasta que la potencia disponible sea mayor o igual que la
necesaria. Esto se interpreta como que existe un punto de intersección entre ambas
curvas y que por lo tanto es posible seguir ascendiendo y el programa vuelve a
empezar los cálculos a una altitud superior. Conforme aumenta la altitud, para cada
velocidad la potencia necesaria es mayor y la disponible menor, es decir, ambas
curvas se van separando y al mismo tiempo estamos aumentando también la
velocidad. En el momento en que el Mach supere al crítico introducido en la hoja
“Datos” se interrumpe el proceso y se toma como techo aproximado la última altitud
obtenida menos el incremento de altitud.
Los incrementos de altitud están fijados en 1000 metros, lo cual hace imposible
obtener techo inferiores a 1000 metros, en cuyo caso el programa señalaría 0 metros
como techo aproximado. Evidentemente con incrementos menores se obtendrían
resultados más ajustados pero se penalizaría en exceso el tiempo invertido en el
cálculo. Como se puede ver el programa tarda ya unos segundos con tan poca
precisión.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
58
Obtenido el techo, el resultado se manda a la celda “BD3” de la hoja
“Ref.celdas”, de donde será reenviado automáticamente a la celda “C3” de la hoja
“Actuaciones”.
• Cálculo de las curvas de potencia disponible y necesaria a distintas
altitudes
A continuación se calculan los intervalos de altitudes, que se usarán para los
siguientes cálculos, directamente en la hoja “Ref.celdas” tomando como extremos el
valor del techo aproximado y el nivel del mar y calculando el resto de altitudes a
intervalos iguales.
Estas altitudes serán empleadas para calcular las actuaciones más adelante y
por lo tanto habrá que conocer la curva de potencia disponible para cada una de ellas.
De ello se encarga la macro “CurvasPd5h” que se activa al pulsar el botón “Calcular
curvas Pd a cada altitud” y que tras leer los valores de los cinco niveles de altitud
calculados, va llamando a la macro “CurvaPd”, cuyo funcionamiento ya se ha
explicado en el apartado “Cálculo de la curva de potencia disponible”, para que calcule
dicha curva a cada una de las cinco altitudes.
Los resultados, tanto los puntos calculados de las curvas de potencia, como los
coeficientes de las parábolas de aproximación a las curvas, se mandan a las tablas
preparadas al efecto en el apartado “Actuaciones” de la hoja “Ref.celdas”. En la hoja
“Actuaciones” se presentan cinco gráficos, cada uno correspondiente a una altitud, en
los cuales se representan las curvas de potencia disponible por los diez puntos
calculados y por la aproximación de los mismos a una parábola, junto con las curvas
de potencia necesaria. Los puntos de las curvas aproximadas por parábolas se toman
de las tablas situadas debajo de los gráficos, las cuales se han generado
introduciendo la expresión de la parábola y tomando de las tablas de la hoja
“Ref.celdas” el valor de los coeficientes calculados anteriormente por la macro
“CurvasPd5h”. Se puede ver también que el cálculo de la curva de potencia necesaria
se lleva a cabo directamente en la misma hoja calculando para el peso máximo y para
los valores de la velocidad de la tabla, el Cl y Cd y con ellos, la potencia disponible.
Se observa como a medida que se aumenta la altitud, se dispone de menos
exceso de potencia, limitando así las actuaciones del avión, hasta que a la altitud
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
59
máxima, el margen de velocidades al cual se hace posible el vuelo se reduce
considerablemente.
Una vez que se dispone de las curvas de potencia disponible, el programa está
preparado para el cálculo de actuaciones. Antes iniciar los cálculos se necesita el dato
de la posición de la palanca de gases a la que se quieren calcular las actuaciones.
Este se introduce en la celda indicada de la hoja “Actuaciones” y es copiado
inmediatamente a la celda homóloga de la hoja “Ref.celdas”.
Una vez introducido el dato anterior se pulsa sobre el botón “Calcular
actuaciones” para arrancar la macro que llevará a cabo los cálculos: “CalcActuaHyW”
que empieza leyendo los valores de la posición de la palanca de gases, los valores de
los cinco pesos a los que se calcularán las actuaciones y el porcentaje de combustible
con respecto a la capacidad máxima del mismo que le corresponde a cada uno. Estos
pesos se calculan en las celdas correspondientes de las tablas de “cálculo de
actuaciones para pesos y altitudes” de la hoja “Ref.celdas” tomando como extremos el
peso máximo y mínimo indicados al principio del programa en la hoja “Datos” y
calculando los demás a intervalos iguales. Los porcentajes de la cantidad de
combustible cargado se han establecido en 20% para el peso mínimo, 100% para el
peso máximo y el 40, 60 y 80% para los otros tres pesos, de menor a mayor
respectivamente. Estos porcentajes serán usados en el cálculo de la autonomía y el
alcance.
A continuación el programa llama a la macro “CalcActuacsH” para cada uno de
los pesos, indicándole como argumentos la posición de la palanca de gases, el peso,
el porcentaje de combustible cargado y por último el valor de w, que es un número que
usarán las siguientes macros para saber para cual de los pesos se le han solicitado los
cálculos, y así enviar los datos a las celdas correctas: al peso1 le corresponde w = 1,
al peso2 w = 2 y así sucesivamente. También se encarga de llamar a la macro
“Techos” para cada peso, que es la encargada del cálculo de los techos teórico y
práctico, pero esto lo hace al final, después de que “CalcActuacsH” haya terminado
con el último peso (peso5)
Lo primero que hace la macro “CalcActuacsH” es leer los valores de las cinco
altitudes a las que tendrá que calcular las actuaciones para cada peso que se le haya
indicado. Después llama a la macro “CalculaActuacs” para cada una de las altitudes
enviándole los datos de la palanca de gases, peso, altitud, combustible cargado, las

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
60
celdas que contienen los coeficientes de la parábola de potencia disponible, w y alt,
que hace la misma función que w para los pesos pero para el caso de las altitudes.
Esta macro es la que realmente calcula las actuaciones para el peso y altitud que le
manden.
Después de haber calculado las actuaciones para las cinco altitudes
“CalcActuacsH” se encarga de el cálculo de las carreras de despegue y aterrizaje para
el peso que le corresponda. Se ha establecido que se calculen a cinco altitudes de
pista fijas, que son 0, 250, 500, 750 y 1000 metros. Tras tomar estos valores, se activa
la macro “Carreras” para cada una de las altitudes de pista mencionadas.
Una vez que hemos comentado el proceso general del cálculo de actuaciones
procederemos a comentar cómo se realizan los cálculos dentro de la macro
“CalculaActuacs”.
El primer paso es la recogida de datos necesarios en el resto de la macro y la
lectura de una celda de referencia para mandar los resultados a la tabla correcta, es
aquí donde resulta de utilidad el uso de los dos valores, w y alt.
• Cálculo de velocidades mínima y máxima.
Para el cálculo de las velocidades mínima y máxima se sigue el mismo proceso
iterativo que cuando se calcularon las actuaciones previas durante la adaptación de la
hélice:
Se parte de una velocidad de 0.5 m/s TAS y se comparan las potencias
necesaria y disponible para esa velocidad. Si la necesaria es mayor que la disponible
se aumenta la velocidad con incrementos fijados en 5 m/s hasta que la potencia
necesaria sea menor que la disponible, lo que equivale a que las dos curvas se corten.
A partir de ahí se reducen los intervalos y se varía la velocidad hasta que la diferencia
de las dos potencias sea menor a 0.01 CV. La velocidad resultante es la velocidad
mínima por tracción.
Para el cálculo de la velocidad mínima se restaura el incremento de
velocidades a 5 m/s Vtas y se sigue aumentando la velocidad y comparando las
potencias necesaria y disponible hasta encontrar el siguiente punto de corte de las dos
curvas, momento en que la disponible sea de nuevo menor a la necesaria. Empieza el

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
61
proceso de ajuste que consiste en ir variando la velocidad haciendo los incrementos
menores hasta que la diferencia de potencias sea como antes, 0.01 CV. La velocidad
resultante es la máxima por tracción.
Previamente al cálculo de las velocidades mínima y máxima se han obtenido la
de pérdida y la de Mach crítico mediante aplicación directa de las expresiones:
LmaxCS5.0
peso 9.81 Vperd
⋅⋅⋅
⋅=
ρ T 287 1.4 Mcrit VMcrit ⋅⋅=
• Cálculo de las velocidades de subida máxima y óptima
En primer lugar se calcula la velocidad de subida óptima, por ser menor que la
de subida máxima.
La velocidad de subida óptima es aquella a la cual el ángulo de la trayectoria
de subida es máximo, por lo que aplicaremos la siguiente expresión:
Sen(γsubida) = Vsubida / VTAS
Para buscar el máximo se parte de la velocidad mínima por tracción (VTAS) y se
calcula la velocidad de subida para esa velocidad aplicando el concepto de que la
velocidad de subida corresponde al exceso de potencia en la condición de vuelo
correspondiente. La fórmula que usa el programa es:
W
PPV nd
sub
−=
A continuación se calcula el seno de γsubida para esa velocidad y para otra
superior en un incremento de VTAS y se comparan. Si al aumentar la velocidad
aumenta el ángulo, se sigue incrementando esta hasta que empiece a disminuir el
ángulo de subida. Entonces se reduce el incremento de velocidades y se ajusta esta
hasta conseguir la precisión deseada.
La velocidad VTAS obtenida es la de vuelo para conseguir el mayor ángulo de
subida, y Vsub será la velocidad de subida.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
62
El cálculo de la velocidad de subida máxima es más sencillo. Se trata de
encontrar la velocidad a la cual la velocidad de subida es máxima, que corresponde a
la velocidad de vuelo a la cual hay más exceso de potencia disponible.
El proceso de cálculo es parecido al anterior. Se compara la velocidad de
subida a una velocidad de vuelo con la correspondiente a esa velocidad de vuelo
incrementada un punto. Se aumenta la velocidad de vuelo hasta que la de subida
empieza a disminuir. Entonces se ajusta hasta llegar a la precisión requerida.
NOTA: Las velocidades de subida óptima siempre han de ser menores que las de
subida máxima, tanto la de vuelo como la de subida. Sin embargo, los resultados del
programa no cumplen esta condición a partir de altitudes de la mitad del techo
aproximadamente. Sería conveniente repasar este punto en futuras modificaciones,
para verificar si es un fallo de programación o del propio método.
• Cálculo del alcance
El alcance es la distancia que puede recorrer el avión con cierta cantidad de
combustible de que disponga. Es importante conocer la velocidad a la cual se hace
máximo, para poder recorrer la mayor cantidad de kilómetros con el combustible
disponible.
Para calcularlo es necesario conocer el rendimiento propulsivo en la condición
de crucero y antes hay que hacer una estimación de la velocidad de crucero. El
proceso es el descrito por Lafita (Referencia 5.) que consiste en relacionar las
revoluciones de la hélice para una velocidad de vuelo dada y admisión reducida con
las que se tienen en la adaptación de la hélice de la siguiente forma:
00 d
d
P
PK
n
n⋅=
donde como se ve también interviene la potencia de adaptación y la potencia
disponible para la velocida de vuelo deseada, además de una constante K que vale
0.98.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
63
La elección de la velocidad de crucero depende del tipo de aparato y su misión.
El vuelo en crucero es un caso típico de vuelo con admisión reducida y la velocidad
puede oscilar entre un valor obtenido con el motor funcionando al 50% de la potencia
máxima y el 80%.
En nuestro caso se ha tomado un valor correspondiente al 75% de la potencia
máxima. Con este dato ya es posible conocer la velocidad de crucero correspondiente
a partir de la curva de potencia disponible y las revoluciones de nuestra hélice y por lo
tanto calcular J. Con este valor de J obtenemos los coeficientes de tracción y potencia
y por lo tanto el rendimiento.
En primer lugar se estima la fineza máxima, a continuación se obtiene la
velocidad de alcance máximo y con dicha velocidad y el tiempo de vuelo para un avión
de hélice se obtiene el alcance máximo. El tiempo de vuelo viene dado por la
expresión:
−⋅
⋅⋅⋅⋅=
ifD
23
Lhélice
W
1
W
1
2
Sρ
C
C
cec
η
2g
1t
siendo cec el consumo específico de combustible y Wi y Wf el peso inicial y final
respectivamente.
• Cálculo de la autonomía
La autonomía es el tiempo que puede volar un avión con una cierta cantidad de
combustible. Se hace máxima para la velocidad a la cual se requiere la mínima
potencia necesaria para cada peso y altitud de vuelo.
En primer lugar el programa calcula mediante un proceso iterativo la velocidad
de autonomía máxima partiendo de la velocidad mínima por tracción, calculando la
potencia necesaria y comparándola con la que se obtiene para cada incremento de
velocidad. Se aumenta la velocidad mientras que la potencia necesaria disminuya.
Cuando empieza a aumentar la potencia se reducen los incrementos y se ajusta la
velocidad al mínimo de potencia necesaria.
La autonomía máxima corresponde al tiempo máximo de vuelo para la
velocidad calculada y se obtiene a partir de la fórmula que se aplicó para el alcance.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
64
Tras realizar todos los cálculos el programa envía los resultados a las celdas
correspondientes. Para ello activa una celda de la hoja “Ref.celdas” que previamente
se le ha indicado mediante el argumento ”celdaVperd” y manda los datos a las celdas
correspondientes mediante datos de posiciones relativas a la de referencia.
• Cálculo de los techos teórico y práctico
El cálculo de los techos se lleva a cabo en la macro “Techos” y se activa
mediante las llamadas de la macro “CalcActuaHyW” para cada uno de los pesos. Se
usa un método que consiste en calcular la recta de regresión definida por las
velocidades de subida máxima a las cinco altitudes empleadas. Se ha mantenido este
método porque da unos resultados muy satisfactorios con una velocidad de calculo
altísima. Como sabemos, el techo teórico es la altitud a la cual la velocidad de subida
es cero, mientras que el techo práctico es la altitud a la que se obtiene una velocidad
de subida de unos 30 m/min. Por lo tanto una vez obtenidos los coeficientes “at” y “bt”
que definen la recta el cálculo de los techos es inmediato al sustituir los valores de las
velocidades de subida máxima correspondientes.
También se calcula el tiempo mínimo estimado se subida a techo práctico para
cada peso considerado, empleando la siguiente fórmula que se ha obtenido de la
referencia 1. y donde H es el techo teórico, h el techo práctico y VS la velocidad
máxima de subida a nivel del mar.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
65
• CARRERAS DE ATERRIZAJE Y DESPEGUE
El cálculo de las carreras de despegue es la parte del programa que menos
precisión tiene, puesto que los métodos usados están muy simplificados y por ello no
cabe esperar la misma precisión que en el resto del programa, en este apartado
tendremos que contar con alrededor de un 20% de error. Se podría programar un
método más exacto que integrase las funciones de la velocidad para cada tramo
durante las carreras de despegue y aterrizaje, pero los métodos que hemos usado nos
dan la precisión esperada para su simplicidad.
Tanto el las carreras de despegue como de aterrizaje se calculan para cinco
altitudes fijadas que van desde 0 hasta 1000m en intervalos iguales. Todo el proceso
se lleva a cabo en la macro “Carreras”, que es activada por la macro “CalcActuacsH”
para cada uno de los cinco pesos.
Se empieza por la lectura de la polar en despegue y de las celdas de
referencia que servirán para enviar los datos a las tablas de resultados. A continuación
se inicia el cálculo de la carrera de despegue.
Como sabemos dividimos la carrera de despegue en tres tramos como muestra
la figura 6.1.
Figura 6.6.1 Esquema tramos de despegue
- Tramo I: Rodadura.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
66
Es el primer tramo de aceleración y con sustentación nula, cuya velocidad
inicial es cero y velocidad final la de pérdida en el despegue. Tomamos como velocida
promedio Vm1 = 2 * VP / 3 donde VP es la velocidad de pérdida en el despegue. Aquí el
programa pierde mucha precisión por el método de cálculo de la curva de potencia
disponible. En realidad a velocidades pequeñas el avión debería disponer de más
potencia. Sería convenitente tenerlo en cuenta para modificaciones posteriores ya que
se hicieron algunas pruebas con la curva que relaciona la tracción disponible en
función de la velocidad, procedente de la referencia 2. y cuyos datos se encuentran en
la hoja “Curva Pd-V NACA Rep.450”, que dieron buenos resultados, aunque no se
pudieron incorporar al programa. La gráfica de la que se ha obtenido la tabla es la
siguiente:
Figura 6.6.2 Curva generalizada de potencia disponible en función de la
velocidad
Con los datos que acabamos de hallar calculamos la potencia disponible para
la velocidad promedio (Pto1), la resistencia aerodinámica para esa velocidad y para CL
= 0 (no hay sustentación) y la tracción (e).
Dm CSVD ⋅⋅⋅⋅=2
12
1ρ
1
1
m
to
V
Pe =

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
67
A continuación, se calcula la aceleración promedio en el eje longitudinal
teniendo en cuenta el coeficiente de rozamiento, que depende del tipo de pista y la
normal, que es igual al peso del avión.
M
NDea dd
xd
⋅−−=
µ
Conocida la aceleración promedio y supuesta como constante podemos
calcular la distancia integrando la velocidad:
2
122
1
if
xd
Vf
Vixd
Tf
Tid
VV
aa
dVVdtVX
−⋅=⋅=⋅= ∫∫
- Tramo II: Rotación.
Este tramo es aquel en el que el avión revanta el morro para ganar ángulo de
ataque hasta tener la sustentación suficiente para levantar el vuelo. Se considera que
comienza cuando el avión alcanza la velocidad de pérdida y acaba cuando llega a 1.2
veces esta velocidad.
El programa toma como velocidad promedio la raiz de la suma de los
cuadrados de las velocidades inicial y final. Con esta velocidad calcula el CL, la
resistencia (D), la potencia disponible (Pto2) y la tracción e. Mediante las mismas
expresiones usadas en el tramo I, con la excepción de que en este tramo hemos
considerado que la normal es la mitad del peso del avión, puesto que estamos en la
transición desde una sustentación nula hasta que el avión deja de estar en contacto
con el suelo.
Para el cálculo de aceleración promedio y distancia recorrida en el tramo se
usa el mísmo método que en el tramo anterior.
- Tramo III: Ascenso

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
68
Esta fase del despegue se considera que comienza en el instante en que el
avión levanta las ruedas del suelo y finaliza cuando la parte más baja de este ha
superado una altura establecida según normas en 15 m.
El programa toma como velocidad promedio la velocidad de pérdida en el
despegue multiplicada por 1.2 y calcula la potencia necesaria y disponible a ésta
velocidad para poder calcular la velocidad de subida. Una vez conocida esta, calcula el
seno del ángulo de subida y aproximando el seno a la tangente por ser un ángulo
pequeño, calcula la distancia recorrida en el tramo III.
La distancia total se calcula como la suma de las distancias recorridas en los
tres tramos.
A continuación el programa continúa con el cálculo de la carrera de aterrizaje
tomando los datos necesarios como son los coeficientes de la polar en aterrizaje, el CL
máximo y el coeficiente de rozamiento, que depende del tipo de pista y lo obtiene
llamando a la función “NuAterr”. En el aterrizaje se considera que no hay tracción (e =
0).
La carrera de aterrizaje, al igual que la de despegue, se divide en tramos como
vemos en la figura 4.2, para cada uno de los cuales se aplican unas ecuaciones de
fuerzas que van a permitir el cálculo de la distancia total. A continuación se explican en
detalle cada uno de los tramos.
Figura 6.6.3 Esquema tramos de aterrizaje

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
69
- Tramo I: Descenso.
Comienza cuando la parte más baja el avión se encuentra a una altura de 15m.
según normas y finaliza cuando entra en el tramo de recogida. Dependiendo del radio
de la maniobra de recogida se considerará o no el tramo de descenso recto con el
siguiente criterio: si el punto de tangencia de la trayectoria de descenso recto con la de
la recogida está a 15 m. o más de altura, solo se considera el tramo II de recogida,
sino, se considera tramo de descenso recto desde los 15m. hasta el punto de
tangencia con la trayectoria del siguiente tramo.
La velocida promedio es 1.3 veces la velocidad de pérdida en aterrizaje y el
avión desciende con un ángulo γ que según normas para aviones grandes está fijado
en 3º, pero para nuestra aplicación a aviones ligeros se ha visto que no da buenos
resultados, en parte porque en realidad estos aviones descienden con un ángulo en
torno a los 30º. Por ello, si se ampliara el programa para otro tipo de aviones habría
que programar el cambio del ángulo de descenso para aviones “grandes” y
“pequeños”.
La distancia recorrida se calcula de forma análoga a la del tramo de ascenso
en el despegue.
- Tramo II: Recogida.
En este tramo el avión disminuye su velocidad vertical hasta los valores
apropiados para el contacto con el suelo. Las velocidades al principio y al final del
tramo son 1.3 y 1.1 veces la de pérdida respectivamente y el programa toma como
velocidad promedio la raiz cuadrada del producto de ambas.
Según normas el factor de carga en la recogida es n = 1.1 y así se ha
introducido en el programa. Para saber con cierta precisión el fin del tramo, conviene
conocer la altura del centro de gravedad del avión con respecto al suelo con el avión
parado en tierra. Como de momento solo hemos trabajado con aviones ligeros se ha
fijado esta distancia en 1m. No hace falta más precisión para el margen de error con el
que está funcionando el programa, pero si se va a modificar sería importante que el
usuario introdujese el dato al principio del programa.
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
70
La distancia recorrida en el tramo es la correspondiente a la distancia
horizontal de un tramo curvo de radio R, que depende del factor de carga fijado y la
velocidad de vuelo, que empieza a 15m. de altura o en el punto de tangencia con la
trayectoria de la fase anterior.
- Tramo III: flare.
Esta es la fase del aterrizaje en la que el avión toma contacto con el suelo con
una actitud de morro levantado a una velocidad inicial de 1.1 la de pérdida en
aterrizaje, y finaliza cuando el avión está con todas las ruedas en el suelo, sin
sustentación y a la velocidad de pérdida.
El programa toma como velocidad promedio la media aritmética de la inicial y
final. A continuación y de forma análoga al tramo de rotación en el despegue se
calculan el CL promedio, la resistencia (D), la aceleración y la distancia recorrida, pero
esta vez sin empuje.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
71
- Tramo IV: Rodadura.
Este tramo comienza a velocidad de pérdida y termina cuando el avión se ha
detenido. La velocidad promedio elegida es un tercio de la de pérdida en aterrizaje. La
sustentación es nula en todo momento.
El programa calcula el valor de la normal, igual al peso del avión, la resitencia
aerodinámica, la aceleración y la distancia recorrida análogamente al tramo I del
despegue, solo que en este caso no hay empuje.
La distancia total de aterrizaje es la suma de los cuatro tramos.
A continuación el programa manda los datos de las distancias de aterrizaje a
las celdas correspondientes de la hoja “Ref.celdas” agrupando los tramos I y II en uno
solo, de forma que en la hoja de presentación se muestran los resultados del tramo I y
II como el tramo I, los del tramo III como el II y los del IV como el III.
6.7. Validación del programa.
Con el fin de demostrar la capacidad y comprobar que el grado de precisión del
programa procederemos a realizar los cálculos de estimación de actuaciones para un
avión ULM de élice modelo Rans S-6 ES Coyote II, biplaza de ala alta y tren triciclo
construido en tubo y tela cuyas características de vuelo son conocidas. El avión
corresponde al de la imagen que vemos a continuación:
Figura 6.7.1 Rans S-9 ES Coyote II
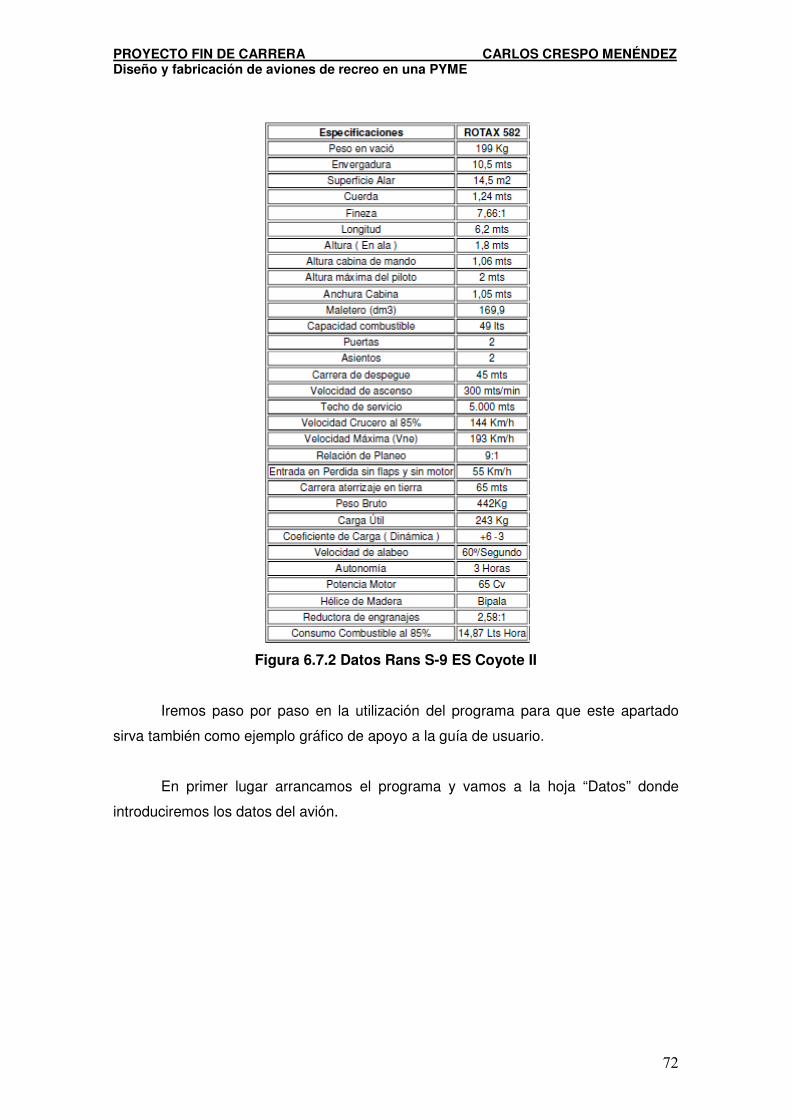
PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
72
Figura 6.7.2 Datos Rans S-9 ES Coyote II
Iremos paso por paso en la utilización del programa para que este apartado
sirva también como ejemplo gráfico de apoyo a la guía de usuario.
En primer lugar arrancamos el programa y vamos a la hoja “Datos” donde
introduciremos los datos del avión.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
73
Figura 6.7.3 Introducción de datos del Coyote
Para calcular el consumo específico de combustible con los datos disponibles
hemos aplicado la siguiente fórmula:
C.E.C = consumo 85% / (potencia máxima * 0.85)
El alargamiento, como sabemos, es el cociente del cuadrado de la envergadura
entre la superficie alar.
Como no disponemos de los datos de la polar la calcularemos por el método de
Roskam, aunque esto nos haga perder precisión en el cálculo de actuaciones. Para
ello pulsamos sobre el botón “Cálculo de la polar: Roskam” y vemos que nos aparecen
los siguientes resultados:

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
74
Figura 6.7.4 Calculo de la polar del Coyote
Donde como vemos, el programa ha introducido por defecto los valores de la
polar de aterrizaje y de despegue iguales a las de crucero.
Pulsamos sobre la pestaña de la hoja “Helice” para activarla y como no
disponemos de hélice nos centraremos en la parte inferior de la hoja, donde
introduciremos los datos disponibles, pulsaremos sobre el botón “Iniciar adaptación” y
a continuación calcularemos la velocidad máxima de vuelo pulsando sobre el botón
“Estimar velocidad máxima”, obteniendo los resultados que vemos en la imagen.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
75
Figura 6.7.5 Introducción de datos de adaptación de la hélice del Coyote
Para éste avión, la adaptación a rendimiento óptimo daba resultados
evidentemente incorrectos. La causa es que se obtienen pasos demasiado pequeños,
por lo que decidimos adaptar la hélice a rendimiento máximo pulsando sobre el botón
“Adaptar a rendimiento máximo” obteniendo los resultados siguientes.
Figura 6.7.6 Adaptación de la hélice del Coyote
Los límites de rendimientos se han establecido en los que vemos en la imagen
anterior con el fin de conseguir un diámetro de la hélice apropiado para el avión.
Vemos como en las opciones con menos rendimiento máximo, aunque
disminuye la velocidad máxima, al trabajar con pasos y diámetros menores, mejora

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
76
considerablemente la carrera de despegue. Elegimos por tanto la opción 4 marcándola
pinchando sobre el círculo en blanco de la casilla de la opción deseada
Podemos comprobar las curvas de potencia para esta adaptación en la hoja
“Curvas potencia Adap Rend Max” y veremos los siguientes resultados.
Figura 6.7.7 Curvasde potencia disponible del coyote
El segundo gráfico muestra las curvas de potencia disponible resultantes de
unir los puntos calculados de la misma. También vemos la aproximación por parábola
a la curva de potencia disponible de la opción 1. En éste ejemplo se puede apreciar
como en la zona donde nos interesaría conocer exactamente la potencia disponible
solo disponemos de una aproximación por la parábola, lo que es lo mismo que
extrapolar los datos de la curva de potencia. Esto es un problema que plantea el
método usado para calcularla que tiene como consecuencia el resultado de la opción 1
que como vemos en el la fgura 3.7 da un resultado claramente erróneo.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
77
Es un buen objetivo el intentar modificar el apartado del cálculo de potencia
disponible en proyectos futuros para intentar que los puntos de la curva estén todos
comprendidos entre la velocidad mínima y máxima. Más adelante en el apartado
correspondiente al cálculo de la curva de potencia disponible se comenta este
problema y una posible solución. De momento, los resultados que hemos obtenido han
sido bastante satisfactorios, por lo que continuaremos con nuestro ejemplo.
En el avión del ejemplo estamos bastante limitados en cuanto al diámetro de la
hélice, y si quisiéramos adaptarla a una velocidad inferior a la máxima con un
rendimiento aceptable nos veríamos obligados a aumentarlo, por lo que nos
conformaremos con la adaptación elegida y calcularemos las actuaciones con esa
hélice.
Activamos la hoja “Actuaciones pulsando sobre la pestaña con el mismo
nombre.
Antes de nada, comprobaremos que el programa ha tomado la opción de
adaptación correcta, como así es en este caso. Lo comprobamos en las celdas
superiores de la hoja.
Como el programa ha calculado la opción correcta procederemos a calcular el
techo aproximado del avión pulsando sobre el botón “Calcular techo aprox”.
Recordemos que este techo está calculado para el peso máximo y con precisión de mil
metros, por lo que sera una aproximación muy conservativa. Vemos el resultado en la
siguiente imagen.
Figura 6.7.8 Techo aproximado del Coyote
Una vez obtenido el techo aproximado pulsaremos sobre el botón “Calcular
curvas Pd a cada altitud” para calcular las curvas de potencia disponible a las altitudes
a las que se calcularán las actuaciones. El resultado son los gráficos que vemos a
continuación.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
78
Figura 6.7.9 Curva Pd del Coyote para h = 0m.
Figura 6.7.10 Curva Pd del Coyote para h = 1000m.
Figura 6.7.11 Curva Pd del Coyote para h = 2000m.
Figura 6.7.12 Curva Pd del Coyote para h = 3000m.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
79
Figura 6.7.13 Curva Pd del Coyote para h = 4000m.
A continuación indicaremos la posición de la palanca de gases a la que
queremos que el programa calcule las actuaciones y pulsamos sobre el botón
“Calcular actuaciones” y vemos los resultados finales de las actuaciones del avión en
las tablas correspondientes a cada peso. Se muestran a continuación.

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
80
Figura 6.7.14 Resultados del Coyote para Peso1

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
81
Figura 6.7.15 Resultados del Coyote para Peso2

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
82
Figura 6.7.16 Resultados del Coyote para Peso3

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
83
Figura 6.7.17 Resultados del Coyote para Peso4

PROYECTO FIN DE CARRERA CARLOS CRESPO MENÉNDEZ Diseño y fabricación de aviones de recreo en una PYME
84
Figura 6.7.18 Resultados del Coyote para Peso 5
A pesar de no disponer de más información acerca de las actuaciones del avión real, sobre todo los pesos y altitudes a los cuales se refieren los datos disponibles, vemos que los resultados del programa guardan bastante similitud con los ofrecidos por la casa Rans, por lo que consideramos que el programa es válido al menos para este tipo de aviones.