5385c3d8e2c05
102
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) GRADO EN INGENIERIA ELECTROMECÁNICA DISEÑO DE UN VEHÍCULO AÉREO NO TRIPULADO PARA EL TRANSPORTE DE PEQUEÑAS CARGAS ESPECIALIDAD MECÁNICA Autor: Rodrigo Álvarez Hernandez Directores: José Porras Galán (Universidad Pontificia Comillas, [email protected]) Juan Luis Zamora (Universidad Pontificia Comillas, [email protected]) Madrid Mayo 2014
-
Upload
guillermo-herrera -
Category
Documents
-
view
4 -
download
0
description
g
Transcript of 5385c3d8e2c05

!
!
!
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI)
GRADO EN INGENIERIA ELECTROMECÁNICA
!DISEÑO DE UN VEHÍCULO AÉREO NO
TRIPULADO PARA EL TRANSPORTE DE PEQUEÑAS CARGAS
ESPECIALIDAD!MECÁNICA!
!Autor:
Rodrigo Álvarez Hernandez Directores:
José Porras Galán (Universidad Pontificia Comillas, [email protected]) Juan Luis Zamora (Universidad Pontificia Comillas, [email protected])
!
!
!
!
Madrid Mayo 2014

! !

ii!!
AUTORIZACIÓN!PARA!LA!DIGITALIZACIÓN,!DEPÓSITO!Y!DIVULGACIÓN!EN!ACCESO!ABIERTO!(!RESTRINGIDO)!DE!DOCUMENTACIÓN!
!
1º./Declaración/de/la/autoría/y/acreditación/de/la/misma./
El!autor!D.!!!!!!!!!!!!!!Rodrigo!Álvarez!Hernández!!!!!!!!!!!!!!!!,!como!!!!!!!!Estudiante!!!!!!de!la!UNIVERSIDAD!PONTIFICIA!COMILLAS!(COMILLAS),!DECLARA!!
que!es!el!titular!de!los!derechos!de!propiedad!intelectual,!objeto!de!la!presente!cesión,!en!relación!con!la!obra!!!!!!!!PROYECTO!FIN!DE!GRADO!!DE!DISEÑO!Y!CONSTRUCCIÓN!DE!UN!VEHÍCULO!AÉREO!NO!TRIPULADO!PARA!TRANSPORTE!DE!PEQUEÑAS!CARGAS.!!!!!!!!!!1,!que!ésta!es!una!obra!original,!y!que!ostenta!la!condición!de!autor!en!el!sentido!que!otorga!la!Ley!de!Propiedad!Intelectual!como!titular!único!o!cotitular!de!la!obra.!!
En!caso!de!ser!cotitular,!el!autor!(firmante)!declara!asimismo!que!cuenta!con!el!consentimiento!de!los!restantes!titulares!para!hacer!la!presente!cesión.!En!caso!de!previa!cesión!a!terceros!de!derechos!de!explotación!de!la!obra,!el!autor!declara!que!tiene!la!oportuna!autorización!de!dichos!titulares!de!derechos!a!los!fines!de!esta!cesión!o!bien!que!retiene!la!facultad!de!ceder!estos!derechos!en!la!forma!prevista!en!la!presente!cesión!y!así!lo!acredita.!!
2º./Objeto/y/fines/de/la/cesión./
Con! el! fin! de! dar! la! máxima! difusión! a! la! obra! citada! a! través! del! Repositorio! institucional! de! la!Universidad! ! y!hacer!posible! su!utilización!de! forma& libre&y&gratuita! (!con& las& limitaciones&que&más&adelante&se&detallan)!!por!todos!los!usuarios!del!repositorio!y!del!portal!e]ciencia,!el!autor!CEDE!a!la!Universidad! Pontificia! Comillas! de! forma! gratuita! y! no! exclusiva,! por! el!máximo! plazo! legal! y! con!ámbito! universal,! los! derechos! de! digitalización,! de! ! archivo,! de! reproducción,! de! distribución,! de!comunicación! pública,! incluido! el! derecho! de! puesta! a! disposición! electrónica,! tal! y! como! se!describen! en! la! Ley! de! Propiedad! Intelectual.! El! derecho! de! transformación! se! cede! a! los! únicos!efectos!de!lo!dispuesto!en!la!letra!(a)!del!apartado!siguiente.!!
3º./Condiciones/de/la/cesión./
Sin!perjuicio!de!la!titularidad!de!la!obra,!que!sigue!correspondiendo!a!su!autor,!la!cesión!de!derechos!contemplada!en!esta!licencia,!el!repositorio!institucional!podrá:!!
(a)! Transformarla! para! adaptarla! a! cualquier! tecnología! susceptible! de! incorporarla! a! internet;!realizar!adaptaciones!para!hacer!posible!la!utilización!de!la!obra!en!formatos!electrónicos,!así!como!incorporar!metadatos!para!realizar!el!registro!de!la!obra!e!incorporar!“marcas!de!agua”!o!cualquier!otro!sistema!de!seguridad!o!de!protección.!!
(b)! Reproducirla! en! un! soporte! digital! para! su! incorporación! a! una! base! de! datos! electrónica,!incluyendo!el!derecho!de!reproducir!y!almacenar!la!obra!en!servidores,!a!los!efectos!de!garantizar!su!seguridad,!conservación!y!preservar!el!formato.!.!!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!1!Especificar!si!es!una!tesis!doctoral,!proyecto!fin!de!carrera,!proyecto!fin!de!Máster!!o!cualquier!otro!trabajo!que!deba!ser!objeto!de!evaluación!académica!

iii!!
(c)! Comunicarla! y! ponerla! a! disposición! del! público! a! través! de! un! archivo! abierto! institucional,!accesible!de!modo!libre!y!gratuito!a!través!de!internet.2!!
(d)!Distribuir!copias!electrónicas!de!la!obra!a!los!usuarios!en!un!soporte!digital.!3!
!
!
4º./Derechos/del/autor./
El!autor,!en! tanto!que! titular!de!una!obra!que!cede!con!carácter!no!exclusivo!a! la!Universidad!por!medio!de!su!registro!en!el!Repositorio!Institucional!tiene!derecho!a:!
a)! A! que! la! Universidad! identifique! claramente! su! nombre! como! el! autor! o! propietario! de! los!derechos!del!documento.!!
b)! Comunicar! y!dar!publicidad!a! la!obra!en! la! versión!que! ceda! y! en!otras!posteriores! a! través!de!cualquier!medio.!
c)! Solicitar! la! retirada!de! la! obra!del! repositorio! por! causa! justificada.!A! tal! fin! deberá!ponerse! en!contacto!con!el!vicerrector/a!de!investigación!([email protected]).!
d)! Autorizar! expresamente! a! COMILLAS! para,! en! su! caso,! realizar! los! trámites! necesarios! para! la!obtención!del!ISBN.!!
d)!Recibir!notificación! fehaciente!de!cualquier! reclamación!que!puedan! formular! terceras!personas!en! relación! con! la! obra! y,! en! particular,! de! reclamaciones! relativas! a! los! derechos! de! propiedad!intelectual!sobre!ella.!
5º./Deberes/del/autor./
El!autor!se!compromete!a:!
a)! Garantizar! que! el! compromiso! que! adquiere! mediante! el! presente! escrito! no! infringe! ningún!derecho!de!terceros,!ya!sean!de!propiedad!industrial,!intelectual!o!cualquier!otro.!!
b)!Garantizar!que!el!contenido!de!las!obras!no!atenta!contra!los!derechos!al!honor,!a!la!intimidad!y!a!la!imagen!de!terceros.!
!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!!2!En!el!supuesto!de!que!el!autor!opte!por!el!acceso!restringido,!este!apartado!quedaría!redactado!en!los!siguientes!términos:!
(c)!Comunicarla!y!ponerla!a!disposición!del!público!a!través!de!un!archivo!institucional,!accesible!de!modo!restringido,!en!los!términos!previstos!en!el!Reglamento!del!Repositorio!Institucional!!
!
3!En!el!supuesto!de!que!el!autor!opte!por!el!acceso!restringido,!este!apartado!quedaría!eliminado.!

iv!!
c)! Asumir! ! toda! reclamación! o! responsabilidad,! incluyendo! las! indemnizaciones! por! daños,! que!pudieran! ejercitarse! contra! la! Universidad! por! terceros! que! vieran! infringidos! sus! derechos! e!intereses!a!causa!de!la!cesión.!
d)!Asumir!la!responsabilidad!en!el!caso!de!que!las!instituciones!fueran!condenadas!por!infracción!de!derechos!derivada!de!las!obras!objeto!de!la!cesión.!
6º./Fines/y/funcionamiento/del/Repositorio/Institucional./
La!obra!se!pondrá!a!disposición!de!los!usuarios!para!que!hagan!de!ella!un!uso!justo!y!respetuoso!con!los! derechos! del! autor,! según! lo! permitido! por! la! legislación! aplicable,! y! con! fines! de! estudio,!investigación,! o! cualquier! otro! fin! lícito.! ! Con! dicha! finalidad,! la! Universidad! asume! los! siguientes!deberes!y!se!reserva!las!siguientes!facultades:!
a) Deberes!del!repositorio!Institucional:!
]! La! Universidad! informará! a! los! usuarios! del! archivo! sobre! los! usos! permitidos,! y! no! garantiza! ni!asume! responsabilidad!alguna!por!otras! formas!en!que! los!usuarios!hagan!un!uso!posterior!de! las!obras!no!conforme!con!la!legislación!vigente.!El!uso!posterior,!más!allá!de!la!copia!privada,!requerirá!que!se!cite! la!fuente!y!se!reconozca!la!autoría,!que!no!se!obtenga!beneficio!comercial,!y!que!no!se!realicen!obras!derivadas.!
]! La! Universidad! no! revisará! el! contenido! de! las! obras,! que! en! todo! caso! permanecerá! bajo! la!responsabilidad!exclusiva!del!autor!y!!no!estará!obligada!a!ejercitar!acciones!legales!en!nombre!del!autor!en!el! supuesto!de! infracciones!a!derechos!de!propiedad! intelectual!derivados!del!depósito!y!archivo!de!las!obras.!El!autor!renuncia!a!cualquier!reclamación!frente!a!la!Universidad!por!las!formas!no!ajustadas!a!la!legislación!vigente!en!que!los!usuarios!hagan!uso!de!las!obras.!
]!La!!Universidad!adoptará!las!medidas!necesarias!para!la!preservación!de!la!obra!!en!un!futuro.!
b)!Derechos!que!se!reserva!el!Repositorio!institucional!respecto!de!las!obras!en!él!registradas:!
]!retirar!la!obra,!previa!notificación!al!autor,!en!supuestos!suficientemente!justificados,!o!en!caso!de!reclamaciones!de!terceros.!!
!
Madrid,!a!28!!de!!Abril!de!!2014!
!
ACEPTA!
!
!
!
Fdo.!Rodrigo!Álvarez!Hernández!

v!!
! !

vi!!
!
!
!
!
!
Proyecto realizado por el alumno: !
Rodrigo Álvarez Hernández !
!
Fdo.: …………………… Fecha: ……/ ……/ …… !
Autorizada la entrega del proyecto cuya información no es de
carácter confidencial EL DIRECTOR DEL PROYECTO
Juan Luis Zamora Macho !
Fdo.: …………………… Fecha: ……/ ……/ ……
José Porras Galán
Fdo.: …………………… Fecha: ……/ ……/ …… !
!
Vº Bº del Coordinador de Proyectos !
Jesús Jiménez Octavio !
!
Fdo.: …………………… Fecha: ……/ ……/ …… !
!
!
!
!
27 05 2014
27 05 2014
27 05 2014
28 05 2014

vii!!
!

ii!!
!
!
!
ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI)
GRADO EN INGENIERIA ELECTROMECÁNICA
!DISEÑO DE UN VEHÍCULO AÉREO NO
TRIPULADO PARA EL TRANSPORTE DE PEQUEÑAS CARGAS
ESPECIALIDAD!MECÁNICA!
!Autor:
Rodrigo Álvarez Hernandez Directores:
José Porras Galán (Universidad Pontificia Comillas, [email protected]) Juan Luis Zamora (Universidad Pontificia Comillas, [email protected])
!
!
!
!
Madrid Mayo 2014

! i!

ii!!
DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO AÉREO NO TRIPULADO PARA EL TRANSPORTE DE PEQUEÑAS CARGAS.
Autor: Álvarez Hernández, Rodrigo
Directores: Zamora Macho, Juan Luis; Porras Galán, José
Entidad Colaboradora: Universidad Pontificia de Comillas – ICAI
RESUMEN DEL PROYECTO
Introducción:
Actualmente se ha popularizado el uso de vehículos aéreos no tripulados, especialmente en el ámbito militar, donde cada vez es más común el uso de estos aparatos, debido al alto coste de su alternativa tripulada. Componentes tales como acelerómetros, giróscopos y magnetómetros, tradicionalmente utilizados para la navegación aérea, son comunmente integrados en los smartphones. Debido al mercado altamente competitivo de la telefonía móvil, los precios de los componentes electrónicos que incluyen han bajado de una forma muy significativa.
Es por ello, que los aficionados al aeromodelismo y la informática comenzaron a equipar a sus modelos con elementos tales como estabilizadores automáticos, que les ayudan a mantener el modelo en el aire y no sentir el efecto de perturbaciones externas en vuelo. La electrónica ha ido haciéndose cada vez mas potente, y con ella se han expandido las posibilidades de estos aparatos, que a día de hoy incluyen características tales como planificación automática del vuelo o navegación por GPS. El aumento de la potencia de estos equipos embarcados ha posibilitado también el control de nuevos tipos de plataformas aéreas, tales como los multicópteros.
El uso de este tipo de vehículos, no se ha restringido al ámbito militar y actualmente se están utilizando para usos que van desde la generación de cartografía hasta la grabación de eventos. Es por ello que desde la asociación de ingenieros de ICAI se nos propuso la creación de un UAV con el fin de transportar medicinas a poblados donde no existe un acceso fácil. Tras varias reuniones, se determinó que debido a la falta de terreno despejado para realizar aterrizajes y despegues, el vehículo habría de despegar y aterrizar de forma vertical. Es por ello, que entre las alternativas existentes se decide el uso de la plataforma conocida como “multirrotor” , concretamente en un cuadricóptero.
El funcionamiento de un cuadricóptero se basa en cuatro hélices de paso constante, ancladas de forma fija a una estructura haciendo que todas sostengan en peso del aparato. Para maniobrar en el aire, el aparato utiliza lo que se conoce como empuje diferencial. Ya que el paso de las hélices es fijo, se puede variar la fuerza que ejerce cada hélice variando las revoluciones a las que gira. Por tanto, para moverse, el aparato se inclina en el sentido que desee lograr el avance.

iii!!
Objeto del proyecto
Como en todos los vehículos de ala rotativa, no existe una superficie aerodinámica fija que logre la sustentación, si no que se ha de consumir energía para mover los rotores, haciendo de ellos una plataforma generalmente poco eficiente. Ya que lo que se busca es el transporte de medicamentos , carecería de sentido un aparato con una autonomía de unos pocos minutos. Es por ello que resulta critica la elección de los componentes para lograr la mayor autonomía posible.
El proyecto se lleva a cabo siempre pensando en lograr la mayor autonomía posible. Para lograr este objetivo, se crean bases de datos de los principales componentes que conforman un cuadricóptero, motores, baterías y hélices para que posteriormente sean analizados por un algoritmo realizado en MATLAB para encontrar la combinación óptima partiendo de un peso base. En el proyecto se lleva a cabo un análisis dimensional de la fuerza de empuje de la hélice para poder llevar a cabo el algoritmo y hallar las características de empuje con los datos que proporcionan los fabricantes, sin embargo, no se proporciona información sobre el perfil aerodinámico de la hélice, por ello nos vemos en la obligación de utilizar un banco de ensayos para caracterizar las hélices, así como datos obtenidos de proveedores, y de paginas web realizadas por aficionados al aeromodelismo.
El algoritmo nos proporciona una buena aproximación inicial al tamaño que habrá de tener la estructura del cuadricóptero. Sin embargo, hasta que la estructura no es completamente diseñada no se puede asegurar que los resultados obtenidos en una primera iteración sean los óptimos. Es por ello que el diseño se convierte en un proceso iterativo hasta alcanzar una solución. Asimismo, el algoritmo proporciona datos sobre las fuerzas máximas que son capaces de ejercer los motores para realizar un diseño mecánico adecuado posteriormente.
Para el diseño de la estructura, partiremos del “know-how” adquirido con un prototipo anterior al proyecto, y de ensayos realizados en él. Ya que el objetivo del proyecto es que el aparato sea utilizado alejado de centros urbanos, es vital que en caso de sufrir algún

iv!!
accidente sea fácilmente reparado, y por ello se realiza una estructura con puntos débiles calculados, donde el reemplazo de la pieza dañada sea sencillo y no requiera de mano de obra especializada, maximizando así el tiempo en el que el aparato pueda estar siendo utilizado.
Las vibraciones presentan otro inconveniente a la hora de realizar el diseño del aparato, ya que no puede confiarse en un correcto equilibrado de los motores y hélices in situ. Por eso se decide colocar aisladores de vibraciones mecánicas entre los brazos y el resto de la estructura, haciendo así el equilibrado de componentes rotativos innecesario.
En el diseño tradicional de estos aparatos, siempre se han colocado las hélices en la parte superior del aparato, soportadas por un brazo que cruza perpendicular al flujo de aire saliente de la hélice, impactando así el aire contra el brazo y creando una fuerza en sentido descendente. Sin embargo, gracias a un análisis de fluidos, se demuestra como una hélice colocada en la parte inferior del aparato no produce este efecto y es por ello que se procede al diseño de esta manera.
Esta elección de diseño tiene también un efecto favorable sobre la eficiencia del aparato pues resulta mas sencillo acercar el centro de gravedad al centro de empuje de los rotores, creando así un aparato más manejable y con unas mejores características de control.

v!!
Los materiales utilizados son principalmente composites, tanto naturales como artificiales a excepción de dos piezas, realizadas en aluminio. Los composites utilizados son la madera y la fibra de vidrio. La madera por su facilidad de ser obtenida y trabajada se utiliza para los brazos, mientras que la fibra de vidrio es utilizada para lograr un chasis ligero a la par que resistente. Se descarta la fibra de carbono por su difícil mecanización y alto precio. Ya que los brazos están realizados en madera sin ningún vaciado, representan un alto porcentaje en el peso total del aparato. La longitud de los brazos será la suficiente como para asegurar que el flujo aire no interfiere con la estructura. Asimismo la sujeción de los brazos a la estructura se lleva a cabo con dos pasadores de rápida y fácil extracción, no requiriendo de esta forma herramientas para su sustitución.
Para comprobar el diseño mecánico del aparato, se llevan a cabo simulaciones en solidworks bajo las condiciones mas desfavorables para comprobar su correcto dimensionado. Ya que el software lo permite, se llevan a cabo caídas libres desde poca altura para comprobar el daño que producen así como para asegurar que son los puntos débiles diseñados los que rompen.
Conclusiones
Todo ello resulta a priori en un cuadricóptero eficiente a la par que robusto y de muy bajo mantenimiento, ideal para la utilización el labores humanitarias. Sin embargo, como ocurre con todos los vehículos aéreos no se podrá determinar su verdadera efectividad hasta que se realicen todas las pruebas pertinentes y se acumulen decenas de horas de vuelo. Será entonces cuando el vehículo pueda entrar en funcionamiento para ser utilizado para labores humanitarias. Sin embargo, se deberá seguir monitorizando el estado del aparato para llevar el mantenimiento preventivo correspondiente.

vi!!
DESIGN AND CONSTRUCTION OF A SMALL UNMANNED AERIAL VEHICLE CAPABLE OF TRANSPORTING SMALL PAYLOADS
Author: Álvarez Hernández, Rodrigo
Directors: Zamora Macho, Juan Luis; Porras Galán, José
Collaborating Entity: Universidad Pontificia de Comillas – ICAI
Abstract
Introduction:
Recently, the use of unmanned aerial vehicles has seen a great rise in usage, especially in military applications where the costs of manned vehicles are notoriously high. Components such as accelerometers, gyroscopes or magnetometers, commonly used for navigation are now commonly used in smartphones, thus making them more affordable due to the large volumes produced.
This is why I.T and model aircraft enthusiasts started introducing sensors in their models, equipping them with features such as automatic stabilization and failsafe. As electronics have become less expensive and more powerful, the horizon for these models has expanded. As they now can integrate GPS and sonar rangefinders new features can be implemented such as mission planning and automatic flying. The rise in computational power of small microprocessors has made new flying machines possible, such as multicopters, which are naturally unstable platforms.
The use of drones hasn’t been limited to military use, as they are now being used in applications, which range from pollution measurements to aerial photography of events. This is why the “Fundación de ingenieros de ICAI”, (a small NGO composed of ICAI engineers), saw the need of having a UAV to transport small packages of medicine to small villages where there is no easy access. Due to the fact that normally there are no clear landing zones, it was determined that the UAV should have VTOL capabilities, this is why from the existing alternatives, the quadcopter was chosen.
A quadcopter’s working principle consists of four fixed-pitch propellers, each powered by a brushless electric motor fixed to a structure, in such a way, that in a hover position, the weight of the craft is sustained evenly. Due to the fact that the pitch of the propeller is fixed, to achieve movement in the air, motor speeds have to be changed in order to tilt the craft and thus creating movement in that direction. This is known as differential thrust.

vii!!
Description
As all vehicles which have a rotating wing, (multicopters included as they are driven by propellers), they lack a fixed airfoil to produce lift and maintain altitude. This makes them very energy dependent, as rotors have to be spinning to maintain flight. To reach the villages we are pretending to transport medical supplies to, a craft that has a long flight time is needed, this is why the component selection is critical.
The project has been carried out always having on our mind ways of extending the range as far as possible. To achieve this, databases of the main components necessary (motors, propellers and batteries) to build a quadcopter are created, so later we introduced them into an Algorithm in MATLAB where they where processed and an optimal combination of the three is given by starting from a chosen payload and frame weight. To create this algorithm, it was first tried to obtain the formulae’s necessary so we could characterize each component according to manufacturers information, however, many of them don’t provide the necessary data, and therefore it was necessary to carry out tests of motors and propellers on a test bench. As this is a lengthy task, to achieve a faster result, we also resorted to online databases where model aircraft hobbyists upload their tests. This provided enough information to achieve reliable preliminary results
The algorithm provides a good starting point to start designing the main frame, however, as the algorithm is based on the frame weight, the design of the craft turns into an iterative process whereby once the frame is designed according to the physical size of components, its weight is to be calculated and introduced in the algorithm again. This process lasts until the chosen components match the frame weight. The algorithm also provides useful information about the vehicles flight characteristics and flight times.
The design is based on the knowledge acquired with a prototype built before the project was started and the flight tests carried out in it. As the craft must be used in places where tools and craftsmen are unlikely to be present, fixes must be easy to accomplish, in case it is damaged. This is why the frame is designed with specific weak points in easily replaceable parts, such as the arms, where tools are not needed in order to service the

viii!!
component, and material is widely available. This way, time taken to service the copter is minimised, and thus maximising its possible operating time.
As accelerometers are very susceptible to mechanical noise, vibrations on the vehicle’s electronics present a problem. As the dynamic balancing of propellers and motors is a complex task, we cannot expect it to be done “in situ” when replacing a component. This is why the frame is split in two parts, the part which links to the arms is isolated from the rest of the craft by rubber vibration dampening devices, thus making the balancing of the rotating components unnecessary.
The traditional design of these aircraft have always located the propellers over the arms, sustained by them, making the high velocity of the airflow impact directly into the arm creating a downward force. This has been demonstrating by a computational fluid analysis, and it has been demonstrated that by locating the propeller in a pusher configuration instead of pulling configuration, can increase efficiency. Exact values for the increase in efficiency have not been given, as computer fluid analysis can only be reliable up to a certain extent.
This design election has been also demonstrated to improve the handling of the vehicle, as its implementation moves the centre of thrust of the motors closer to the centre of gravity of the vehicle

ix!!
Materials chosen are mainly composites, natural and handmade, excluding certain aluminium parts. Wood and Fiberglass have been used to create the frame. Wood provides a material, which is easy to obtain and work with, this is why it is located in the arms, making them easily replaceable. The rest of the frame is made with fiberglass, making it stiff and light at the same time. Carbon fibre is not considered, as it is extremely hard to machine and due to its high cost. As the arms are made of wood, they conform most of the weight. To minimize this effect, they are only long enough so that the propellers exit flow doesn’t interfere with the frame. They connection of the arms to the frame and to the motor mounts is made by two pins which provide enough force to keep the components in place and provide tool-less removal.
To validate the mechanical design of the craft, finite element simulations are made in solid works under the toughest conditions the motors can provide. This way we can guarantee the correct mechanical properties of materials and design. Also, free fall simulations are run, to ensure weak points in the structure are working as designed.
Conclusions
For all the described above, a robust and efficient quadcopter is designed while maintaining very low maintenance and cost, making it very well suited for an NGO. Although the design is intended for small loads, the algorithm can be utilised to design any kind of multicopter with a known payload, may it be medical supplies, a camera or other objects. However, as it normally happens with any kind of aircraft, it will have withstand at least a few dozens of hours of flight without failures and numerous tests before it is declared airworthy, even then it will have to follow routinary maintenance to ensure the safety of the craft
!

x!!
LISTA!DE!SIMBOLOS!
Símbolo! Descripción!!! ,!! ! Aceleración!angular!alabeo!y!cabeceo!respectivamente!!!,!"# ! Aceleración!lineal!máxima!!"! Constante!empuje!hélice!!! Diámetro!de!la!hélice!!! Modulo!de!elasticidad!!!"# ! Eficiencia!del!motor!!! Desplazamiento!del!extremo!(flecha)!
!!,!!,!!,!!! Fuerza!vertical!ejercida!por!el!motor!1,!2,3!y!4!respectivamente!!! ! Empuje!!!"# ! Fuerza!máxima!conjunta!de!los!motores!!!"#,!"# ! Fuerza!total!motores!delanteros!!!"#,!"#$ ! Fuerza!total!motores!traseros!!"! Factor!de!Potencia!!! Momento!de!inercia!de!la!sección!!! ! Intensidad!entrada!al!motor!
!!,!"# ! Intensidad!a!máxima!eficiencia!del!motor!!! ! Intensidad!para!vencer!el!par!de!fricción!del!motor!!! Par!!! Modulo!de!compresibilidad!!! ! Par!generado!por!amperio!aplicado!!! ! Revoluciones!por!minuto!por!voltio!aplicado!!! Distancia!del!motor!al!centro!de!gravedad!del!cuadricóptero!!! ! Longitud!del!brazo!!! Momento!flector!
!!"! ,!!"! ! Masa!/!Peso!total!del!cuadricóptero!!! Viscosidad!del!fluido!!! Velocidad!de!la!hélice!!"! Número!de!rotores!
!,!"#! Velocidad!angular!del!motor,!rad/s!y!Rev./minuto!respectivamente!!! Carga!aplicada!
!"#$%"&! Carga!de!transporte!útil!!!"# ! Peso!de!la!batería!!!"! ! Potencia!eléctrica!!!"# ! Peso!del!controlador!electrónico!de!velocidad!!!"# ! Potencia!mecánica!!!"# ! Peso!del!motor!
!"#$%&!"# ! Precio!por!Bateria!!"#$%&!"# ! Precio!por!ESC!(Controlador!electrónico!de!velocidad)!!"#$%&!"# ! Precio!por!motor!

xi!!
!"#$%&!"! ! Precio!total!de!los!componentes!!"! Resistencia!conjunta!de!batería,!motores!y!conectores!!! Densidad!del!fluido!
!!"# ! Tensión!mecánica!máxima!!! ! Deformación!angular!
!,!!"# ! Angulo!de!Cabeceo!y!cabeceo!máximo!sin!perdida!de!altitud!!! ! Velocidad!del!aparato!!! Tensión!!! ! Tensión!de!batería!!!"# ! Tensión!en!bornes!del!motor!!! Aceleración!en!el!eje!Z!(Aceleración!Vertical)!
! !

xii!!
ACRÓNIMOS!
!
Acrónimo! Significado!BLDC! Brush]Less!Direct!current!!CAD/CAE! Computer!Aided!Design/Engineering!HTA! Heavier!than!air!IMU! Inertial!measurement!unit!LTA!! Lighter!than!air!MILP! Mixed!Integer!Linear!Programming!PID! Proportional!Integral!derivative!UAV! Unmanned!aerial!Vehicle!VTOL! Vertical!Take]off!and!Landing!! !

xiii!!
! !

xiv!!
INDICE!
LISTA&DE&SIMBOLOS&.................................................................................................................................&X!
ACRÓNIMOS&.............................................................................................................................................&XII!
INDICE&......................................................................................................................................................&XIV!
LISTA&DE&FIGURAS&...............................................................................................................................&XVI!
LISTA&DE&TABLAS&................................................................................................................................&XVII!
CAPITULO&1.8&INTRODUCCIÓN&Y&PLANTEAMIENTO&DEL&PROYECTO&.......................................&1!1.1!INTRODUCCIÓN!......................................................................................................................................................!1!1.2!MOTIVACIÓN!..........................................................................................................................................................!2!1.3!OBJETIVOS!DEL!PROYECTO!..................................................................................................................................!5!1.3.1$Optimización$de$componentes$.................................................................................................................$5!1.3.2$Diseño$en$CAD$..................................................................................................................................................$5!
1.4!METODOLOGÍA!DEL!TRABAJO!..............................................................................................................................!6!
CAPITULO&2.8&DESCRIPCIÓN&DE&LAS&TECNOLOGIAS&......................................................................&7!2.$1$Funcionamiento$de$un$multicóptero$........................................................................................................$8!2.1.1!Control!de!posición.!....................................................................................................................................................................!8!2.1.2!Control!de!la!guiñada!..............................................................................................................................................................!10!
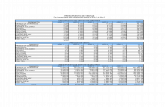
CAPITULO&3.8&DESCRIPCION&DEL&ALGORITMO&DE&OPTIMIZACION&.......................................&11!3.0.1$Parámetros$mecánicos:$............................................................................................................................$11!Análisis!dimensional!..........................................................................................................................................................................!11!
3.0.2$Parámetros$Eléctricos$...............................................................................................................................$15!3.0.3$Otros$Parámetros$........................................................................................................................................$19!3.0.4$Datos$de$Partida$..........................................................................................................................................$19!
3.1!ALGORITMO!..........................................................................................................................................................!20!3.1.1$Cálculo$de$parámetros$en$Hover$..........................................................................................................$20!3.1.2$Cálculo$de$parámetros$a$máxima$potencia$.....................................................................................$20!3.1.3$Cálculo$de$parámetros$a$máxima$eficiencia$...................................................................................$21!3.1.4$Viabilidad$del$caso$......................................................................................................................................$22!3.1.5$Procedimiento$de$Filtrado$......................................................................................................................$22!
CAPITULO&4.8&ANÁLISIS&DE&LOS&RESULTADOS&.............................................................................&23!
CAPITULO&5.8&DISEÑO&DE&LA&ESTRUCTURA.&..................................................................................&29!5.1$Consideraciones$Previas$..............................................................................................................................$29!5.2$Objetivos$.............................................................................................................................................................$30!5.3$justificaciones$de$Materiales$......................................................................................................................$32!Brazo!.........................................................................................................................................................................................................!32!Chasis!........................................................................................................................................................................................................!33!Soportes!motor!.....................................................................................................................................................................................!34!
5.4$Justificaciones$de$diseño$..............................................................................................................................$35!Chasis!........................................................................................................................................................................................................!35!Placa!sucia!..............................................................................................................................................................................................!36!Soportes!motor!.....................................................................................................................................................................................!36!brazo!.........................................................................................................................................................................................................!38!Pasadores!................................................................................................................................................................................................!41!Montaje!de!componentes!.................................................................................................................................................................!42!
5.5$Análisis$de$los$elementos$.............................................................................................................................$43!Centro!de!empuje!y!Gravedad!........................................................................................................................................................!44!Resistencia!mecánica!.........................................................................................................................................................................!45!

xv!!
5.6$Analisis$del$flujo$de$la$hélice$......................................................................................................................$48!
CAPITULO&6.8&CONCLUSIONES&............................................................................................................&53!
BIBLIOGRAFIA&.........................................................................................................................................&55!
ANEXO&A&–ALGORITMO&DE&OPTIMIZACIÓN&...................................................................................&57!
ANEXO&B8ALGORITMO&PARA&EL&ANÁLISIS&DE&LOS&RESULTADOS&..........................................&61!
ANEXO&C8&ANÁLISIS&DATOS&BANCO&DE&ENSAYOS&........................................................................&63!
ANEXO&D&–&PLANOS&................................................................................................................................&65!!

xvi!!
LISTA!DE!FIGURAS!
Figura!1!–!Clasificación!de!vehículos!Aereos!......................................................................................!2!Figura!2!–!Movimientos!de!una!aeronave!.........................................................................................!3!Figura!3!–!Izq.:Helicóptero!tradicional.!Dcha.:Rotores!en!tándem!....................................................!3!Figura!4!–!Izq.:!Monorotor.!Dcha.:!rotores!coaxial!............................................................................!4!Figura!5!–!Dirección!de!giro!de!los!rotores!y!dirección!de!las!fuerzas!...............................................!9!Figura!6!–!Esquema!de!colocación!de!cuatro!hélices!rotando!en!la!misma!dirección!.....................!10!Figura!7!–!Ajuste!de!la!Fuerza!de!empuje!Vs!RPM!...........................................................................!13!Figura!8!–!Empuje!vertical!y!torsor!vs!rpm!......................................................................................!13!Figura!9!–!Par!vs!rpm!.......................................................................................................................!14!Figura!10!–!Esquema!eléctrico!.........................................................................................................!15!Figura!11!–!Tensión!vs!corriente!......................................................................................................!17!Figura!12!–!Resistencia!de!la!bateria!(Vuelo!del!prototipo)!.............................................................!17!Figura!13!–!Consumo!eléctrico!en!relación!a!velocidad!angular!......................................................!18!Figura!14!–!Izq.:!3dr!Quad!C.!Dcha.:!CAD!del!prototipo!...................................................................!29!Figura!15!–!Esquema!Flujo!de!aire!movido!por!una!hélice!..............................................................!31!Figura!16!–!Grafica!elección!maderas,!densidad!vs!Límite!elástico!.................................................!32!Figura!17!–!Grafica!elección!de!composites,!densidad!vs!Límite!elástico!........................................!33!Figura!18!–!Chasis!............................................................................................................................!35!Figura!19!–!Placas!sucias!montadas!.................................................................................................!36!Figura!20!–!Soporte!motor!...............................................................................................................!37!Figura!21!–!Simulación!de!carga!sobre!el!soporte!motor!................................................................!37!Figura!22!–!Simulacion!de!deformación!sobre!el!soporte!motor!....................................................!38!Figura!23!–!Simulación!flexión!brazo,!madera!abeto!.......................................................................!41!Figura!24!–!R]clip!.............................................................................................................................!42!Figura!25!–!Perno!de!sujección!........................................................................................................!42!Figura!26!–!Separadores!de!Nylon!...................................................................................................!42!Figura!27!–!Quadricóptero!en!posicion!de!avance!de!30º!...............................................................!43!Figura!28!–!Centros!de!masas!de!los!componentes!.........................................................................!44!Figura!29!–!Relación!entre!centro!de!gravedad!y!de!empuje!..........................................................!45!Figura!30!–!Representación!gráfica!del!peso!de!los!componentes!..................................................!46!Figura!31!–!Componentes!ordenados!por!peso!...............................................................................!46!Figura!32!–!Zonas!más!cargadas!a!máxima!potencia!.......................................................................!47!Figura!33!–!Simulación!de!cargas!sobre!las!placas!sucias!................................................................!48!Figura!34!–!Flujo!aire!con!la!hélice!colocada!en!posicion!superior!..................................................!49!Figura!35!–!Flujo!de!aire!con!la!hélice!colocada!en!posicion!inferior!..............................................!50!Figura!36!–!Diferencia!de!presiones!con!la!hélice!colocada!en!posición!superior!...........................!50!Figura!37!–!Diferencia!de!presiones!con!la!hélice!colocada!en!posición!inferior!............................!51!Figura!38!–!Renderizado!de!la!estructura!final!................................................................................!54!! !

xvii!!
!
LISTA!DE!TABLAS!
Tabla!!1!]!Resultados!en!"Hover"!.....................................................................................................!24!Tabla!!2!]!Resultados!a!máxima!potencia!.........................................................................................!25!Tabla!!3!]!Resultados!de!máxima!eficiencia!en!vuelo!......................................................................!26!Tabla!!4!]!Propiedades!mecánicas!de!la!madera!de!Abeto!..............................................................!33!Tabla!!5!]!Propiedades!De!la!Fibra!de!vidrio!Utilizada!.....................................................................!34!Tabla!!6!]!Propiedades!del!aluminio!seleccionado!...........................................................................!34!Tabla!!7!]!Iteración!para!la!eleccion!del!espesor!del!brazo!..............................................................!40!! !

! 1!
CAPITULO!1.]!INTRODUCCIÓN!Y!PLANTEAMIENTO!DEL!PROYECTO!
!
1.1!INTRODUCCIÓN!
!
Recientemente! se! están! popularizando! el! uso! de! UAV! (Vehículos! aéreos! no! tripulados)! o!drones,! especialmente! en! el! ámbito!militar,! donde! el! coste! por! vehículo! es!mucho!menor! que! la!alternativa! pilotada! y! en! caso! de! perdida! no! existe! riesgo! para! el! piloto.! Como! de! costumbre,! las!tecnologías! de! ámbito! militar! están! llegado! de! una! forma! accesible! al! plano! civil (Devaud, et al. 2012),!donde!abren!un!abanico!de!posibilidades.!Actualmente!en!el!ámbito!militar!existen!multitud!de!tipos!de!UAV,!desde!pequeños!helicópteros!de!unos!pocos!gramos,!hasta!aparatos!de!ala!fija!de!26m!!de!envergadura!y!varias!toneladas.!En!el!ámbito!civil!hasta!hace!unos!años,!lo!mas!común!era!encontrar! aviones! o! helicópteros! de! aeromodelismo.! ! Sin! embargo! la! bajada! de! precios! de! los!componentes!electrónicos!y!la!popularización!de!plataformas!como!Arduino!han!posibilitado!dotar!a!estos!modelos!de!radiocontrol!con!pilotos!automáticos!y!mecanismos!de!estabilización (3DRobotics 2014).!! !
Al!hablar!de!vehículos!no!tripulados,!se!viene!a!la!mente,!complejos!sistemas,!con!modernos!sistemas! informáticos,!gobernados!por!una!electrónica!compleja (Hoffer, et al. 2013),!sin!embargo!nada!mas!lejos!de!la!realidad.!Los!primeros!vehículos!no!tripulados!comenzaron!en!forma!de!globos.!Los!primeros!pioneros!en!la!aviación,!los!hermanos!Montgolfier,!ya!construyeron!los!primeros!globos!no! tripulados! antes! de! realizar! su! primer! vuelo.! El! concepto! fue! desarrollado! en! la! guerra! de! la!independencia!de!los!Estados!Unidos,!donde!los!estados!confederados!se!vieron!atacados!por!globos!no! tripulados,! que! al! impactar! generaban! grandes! incendios.! Años! después,! al! principio! de! la!Segunda!Guerra!Mundial,! Japón! intento!una!hazaña!parecida! !al! soltar!globos!de!gran!altitud!para!intentar! causar! grandes! incendios! en! los! bosques! norteamericanos.! Sin! embargo,! los! primeros!vehículos! controlados! no! llegaron! hasta! la! Segunda! Guerra!Mundial,! donde! tanto! Estados! Unidos!como!Alemania! desarrollaron! pequeños!UAV! cargados! con! explosivos! para! ser! soltados! desde! sus!bombarderos!y!radio!pilotados!hacia!los!objetivos.!Debido!al!éxito!de!estos!aparatos,!se!comenzó!a!desarrollar!vehículos!cada!vez!mas!complejos,!donde!a!día!de!hoy,!tienen!autonomía!de!varios!días!y!son! capaces! de! recorrer! medio! mundo! para! realizar! misiones.! Otros! vehículos! mas! pequeños! de!despegue! vertical! equipados! con!una! cámara! sirven! también!para! reconocer! terreno!y! asegurar! el!avance!de!tropas (Huang, et al. 2009).!
Actualmente!este!tipo!de!vehículos!ya!se!están!utilizando!en!el!ámbito!de!las!ONG.!Sus!usos!van!desde!la!vigilancia!de!cazadores!furtivos,!hasta!la!observación!de!catástrofes!naturales.!Por!ello,!con! la! Fundación! de! ingenieros! de! ICAI! creemos! que! un! pequeño! UAV! capaz! de! llevar! pequeñas!cargas! tales! como! pequeñas! dosis! de! medicamentos,! o! una! pequeña! cámara! de! alta! definición,!puede!ser!una!herramienta!de!gran!utilidad!en!el!ámbito!de!la!ayuda!humanitaria (Almurib, Nathan and Kumar 2011).!
! !

! 2!
1.2!MOTIVACIÓN!!
!
Debido!al!estado!de!los!avances!en!esta!tecnología,!resulta!lógico!para!una!ONG!hacerse!con!este!tipo!de!aparatos.!La!utilización!de!un!UAV!de!bajo!coste!puede!resultar!una!gran!herramienta!para! tareas! tales! como! el! transporte! de! medicinas,! el! control! de! incendios,! la! búsqueda! de!supervivientes!tras!un!naufragio,!o!la!observación!de!cultivos!para!el!control!de!plagas!(Pounds and Mahony 2009).!(Mellinger, et al. 2011)!
En! el! mundo! aeronáutico! se! distinguen! habitualmente! dos! tipos! de! aparatos,! los!denominados!de!ala!móvil,!es!decir,!la!sustentación!se!logra!con!un!perfil!aerodinámico!rotando,!y!el!ala!fija,!donde!la!superficie!de!sustentación!no!tiene!movimiento!relativo!con!el!resto!del!aparato.!De!las! alternativas! existentes,! debido! a! la! naturaleza! de! los! lugares! donde! va! a! ser! utilizado,! no! se!disponen!de!pistas!de!aterrizaje,!por!lo!que!se!requiere!un!vehículo!de!despegue!vertical.!Atendiendo!a!la!figura!1,!de!los!vehículos!mas!pesados!que!el!aire!(HTA),!la!única!alternativa!es!que!se!disponga!de!ala!móvil,!quedando!así,!la!alternativa!del!ala!fija!descartada.!No!se!consideran!los!vehículos!mas!ligeros!que!el!aire!(LTA)!ya!que!para!levantar!un!peso!determinado,!se!requiere!de!grandes!tamaños.!
!
FIGURA!1!–!CLASIFICACIÓN!DE!VEHÍCULOS!AEREOS!
Dentro!de!la!categoría!de!despegue!vertical,!nos!encontramos!con!distintos!tipos!de!aparatos!que! iremos! analizando,! independientemente! del! tipo,! para! considerarse! maniobrable! en! el! aire!habrá!de!tener!al!menos!los!siguientes!movimientos!(figura!2).!
Vehiculo!Aereo!
LTA!
No!motorizado!
Globo!Aerostatico!
Motorizado! Dirigible!
HTA!
No!motorizado! Planeador!
Motorizado!
Ala!Yija!
Ala!movil!
Autogiro!
VTOL!
Tipo!pajaro!

! 3!
!
FIGURA!2!–!MOVIMIENTOS!DE!UNA!AERONAVE!
En! primer! lugar,! nos! encontramos! con! la! idea! tradicional! de! helicóptero! (figura! 3! Izq.),! un!único! rotor!proporcionando! todo!el!empuje.!Como!puntos!positivos,! tiene!una!excelente!habilidad!para!el! vuelo!en!estático!o!a!bajas! velocidades! teniendo!así!una!gran!agilidad!a!bajas! velocidades,!mientras! que! se! resiente! a! altas! velocidades,! pues! en! condiciones! de! vuelo! horizontal! existe! una!velocidad! límite! donde! las! palas! pierden! velocidad! relativa! con! el! aire! perdiendo! sustentación.! El!concepto!es!posible!desarrollarlo!en!pequeña!escala,!sin!embargo,!la!complejidad!aerodinámica!en!el!movimiento!de!sus!palas!hace!que!tenga!muy!poca!capacidad!de!supervivencia!a!impactos.!Al!tener!un!único!rotor,!si!se!quieren!limitar!las!dimensiones,!la!capacidad!de!carga!se!ve!limitada,!limitando!así!los!posibles!usos!del!aparato.!
!
FIGURA!3!–!IZQ.:HELICÓPTERO!TRADICIONAL.!DCHA.:ROTORES!EN!TÁNDEM!
Para!un!mayor!levantamiento!de!carga!manteniendo!el!volumen!,!se!desarrollan!los!rotores!en!tándem.!El!ejemplo!más!notable!ello!es!el!Boeing!CH]47!Chinook!(figura!3!Dcha.),!el!helicóptero!de! transporte!del! ejercito! americano!desde! los!60.!El! segundo! rotor,! también!ayuda!al! control! del!aparato,! sin!embargo,! reduce!su!agilidad!a!bajas!velocidades,!mientras!que!se!mantiene!a! la!par!a!altas!velocidades!respecto!a!un!helicóptero!tradicional.!!
Una!variación!del!concepto!de!helicóptero,!es!el!concepto!de!mono]rotor!(figura!4!Izq.),!en!este!diseño!se!evita!la!contra]rotación!del!aparato!colocando!cuatro!superficies!de!control!a!la!salida!

! 4!
del!flujo!de!la!hélice!colocada!en!el!centro!del!aparato.!Estas!cuatro!superficies!de!control,!permiten!todos!los!movimientos!de!una!aeronave!(cabeceo,!alabeo!y!guiñada).!La!altitud!es!controlada!gracias!a! la!velocidad!de!rotación!de! la!hélice.!Como!en!todos! los!aparatos!sustentados!por! la! rotación!de!una!hélice,! el! factor!de!potencia! requerida!es! alto.! En!este! caso,! los! componentes!a! controlar! son!cuatro!superficies!de!aerodinámicas!y!la!velocidad!del!motor.!Ello!supone!un!complejo!control!y!una!agilidad! disminuida! respecto! al! helicóptero! tradicional.! Sin! embargo,! este! tipo! de! plataforma! es!capaz!de!avanzar!a!gran!velocidad,!y!al!tener!la!hélice!en!el!centro!del!aparato,!puede!ser!protegida!por!un!carenado,!haciendo!la!plataforma!muy!robusta!ante!impactos.!A!pesar!de!todo,!la!capacidad!de!transporte!no!es!demasiado!elevada,!puesto!que!es!muy!fácil!que!la!carga!interfiera!con!el!flujo!de!aire,!limitando!así!cargas!voluminosas.!!
!
FIGURA!4!–!IZQ.:!MONOROTOR.!DCHA.:!ROTORES!COAXIAL!!
La!contra!rotación!puede!ser!evitada!colocando!otra!hélice!girando!en!sentido!contrario!con!su! correspondiente!motor.! Esta! característica! añadida! hace! el! aparato!mucho!mas!manejable.! En!este!caso!solo!son!necesarias!dos!superficies!de!control,!una!de!ellas!para!conseguir!el!alabeo!y!otra!el!cabeceo.!La!altitud!es!controlada!gracias!a! la!velocidad!absoluta!de! los!motores,!mientras!que!la!guiñada!es!controlada!variando!la!velocidad!relativa!de!los!motores.!Este!concepto!es!conocido!como!multirrotor!coaxial(figura!4!Dcha.).!!Gracias!al!segundo!motor!añadido,!es!capaz!de!portar!una!mayor!carga,! sin!embargo,!debido!al!diseño! similar! al! rotor!único,! la! colocación!de!una!carga!voluminosa!interfiere! directamente! con! el! flujo! de! aire.! Sin! embargo,! al! tener! únicamente! dos! superficies! de!control,!la!complejidad!mecánica!disminuye,!pero!como!en!todos!los!modelos!tratados!hasta!ahora,!al! tener!superficies!aerodinámicas!móviles!tales!como!alerones!o!palas!de!paso!variable!hacen!que!este!tipo!de!aparatos!tengan!una!alta!complejidad!aerodinámica.!!
Por! ultimo,! se! consideran! los!multirotores,! cuya! única! desventaja! respecto! a! los! aparatos!tratados! anteriormente! es! su! menor! eficiencia! energética.! En! el! resto! de! apartados! tratados!representan!una!mejor!alternativa.!Sin!embargo!los!multirrotores!representan!una!mejor!alternativa!debido!a!la!menor!complejidad!mecánica!pues!carecen!de!mecanismos!de!control!de!paso!de!hélice!!lo!cual!les!proporciona!robustez.!
Debemos!destacar,!que!en!todos!vehículos!de!ala! rotativa,! la!velocidad!máxima!horizontal,!viene!limitada!por!la!velocidad!de!rotación!de!sus!hélices.!En!una!situación!de!avance!horizontal,! la!velocidad!del! rotor,!viene!compuesta!por! su!velocidad!de! rotación!unida!a! la!velocidad!de!avance.!Esto!hace!que!la!velocidad!relativa!al!aire!(asumiendo!condiciones!sin!viento)!en!un!lado!del!aparato,!sea! menor! cuanto! mayor! sea! la! velocidad! horizontal,! creando! una! falta! de! sustentación.!Tradicionalmente,!este!problema!se!ha!resuelto!con!rotores!girando!a!una!mayor!velocidad!o!con!la!colocación!de!mas!palas!para!aumentar!la!sustentación,!sin!embargo,!la!máxima!velocidad!de!avance!

! 5!
de! un! cuadricóptero! es! despreciable! frente! a! la! velocidad! lineal! en! el! extremo! de! la! hélice,! y! por!tanto!no!se!produce!el!efecto!descrito.!
Para!minimizar!los!posibles!costes,!la!solución!mas!adecuada!ya!que!minimiza!la!complejidad!mecánica! y! aerodinámica,! es! el! uso! de! una! plataforma! de! tipo! multirrotor.! A! pesar! de! la! menor!eficiencia! energética! en! comparación! a! los! helicópteros! tradicionales,! con! una! optimización! de! la!estructura,!motores! y!baterías!dada!una! cierta! carga,! representa!una!plataforma!muy! competente!para!desarrollar!las!tareas!de!cooperación!y!desarrollo!de!las!ONG. (aundes, et al. 2013)!
!
1.3!OBJETIVOS!DEL!PROYECTO!
Dada!la!naturaleza!del!proyecto,!se!dividirá!en!varias!partes,!para!facilitar!el!seguimiento!del!mismo.!Siendo!las!principales!partes:!
• Optimización!de!los!componentes!• Diseño!en!CAD!del!multicóptero!
!Y!por!ultimo,!se!incluirán!todos!los!planos!para!que!la!construcción!del!prototipo!se!lleve!a!cabo!de!una!manera!directa!y!sin!la!necesidad!de!diseñar!ningún!otro!componente.!!
1.3.1!OPTIMIZACIÓN!DE!COMPONENTES!
Se! realizara! una! base! de! datos! con! los! principales! componentes! que! constituyen! un!multicóptero,! tales! como!motores,! baterías! y! hélices.! Posteriormente! se! introducirán! parámetros!tales!como!el!número!de!rotores!y!la!carga!a!transportar.!De!esta!forma,!el!algoritmo,!calculará!todas!las! combinaciones! posibles! con! los! componentes! dados,! y! posteriormente,! filtrará! los! resultados!dejando!solo!los!casos!compatibles,!ordenándolos!por!tiempo!de!vuelo.!!!
!
1.3.2!DISEÑO!EN!CAD!
!
Tras! obtener! los! componentes,! se! modelarán! en! CAD,! teniendo! en! mente! que! se! quiere!diseñar!una!estructura!sencilla!de!fabricar,!de!bajo!costo,!y!con!materiales!fácilmente!accesibles!para!!los! posibles! usuarios! finales,! de! tal! forma! que! puedan! tener! recambios! de! una! forma! rápida! y!eficiente.!Este!paso! también! resulta!muy!útil!para!obtener!momentos!de! inercia,!masas!y!posición!del!centro!de!gravedad!necesarios!en!el!diseño!del!sistema!de!control!(Pounds and Mahony 2009).!!
! !

! 6!
1.4!METODOLOGÍA!DEL!TRABAJO!
!
Debido! a! que! el! objetivo! del! proyecto! no! es! el! estudio! aerodinámico! de! las! hélices,! se!procederá!con!una!fase!previa!de!ensayo!de!ciertos!modelos!de!hélices!a!distintas!velocidades!para!hallar!el!empuje!y!poder!introducirlo!en!la!optimización.!!Para!ello,!se!!utilizará!un!banco!desarrollado!en!un!proyecto!paralelo.!Con!él,!procederemos!a!ensayar!distintas!hélices!y!motores,!de!esta!forma,!podremos! tener! resultados! fiables.! Sin! embargo,! también! nos! apoyaremos! en! bases! de! datos!generadas! por! usuarios! en! internet,! con! el! fin! de! contar! con! una!mayor! cantidad! de! datos,! pues!debido! al! limitado! tiempo! del! proyecto! es! imposible! realizar! una! base! de! datos! de! múltiples!componentes!a!tiempo.!!!
El!banco!de!ensayos!realiza! la!adquisición!de!datos!en!MATLAB,!por!ello,!se!decide! llevar!a!cabo!la!optimización!del!UAV!en!el!mismo!paquete! informático.!Estudiaremos!todas! las!ecuaciones!tanto!eléctricas!como!mecánicas!para!modelar!el!consumo!del!aparato!en!determinadas!condiciones!de!vuelo.!No!todos! los!datos!de! los!componentes!serán!proporcionados!por!el! fabricante,!por!ello,!serán!obtenidos!gracias!a!un!prototipo!desarrollado!en!verano!de!2013.!!
! También!aplicaremos!el!“know]how”!adquirido!del!prototipo!y! lo!aplicaremos!al!diseño!del!nuevo! aparato.! El! diseño! se! llevará! a! cabo! teniendo! en! mente! la! reducción! de! costes,! la!reparabilidad,!simpleza!en!el!diseño!y!eficiencia.!Posteriormente,!se!aplicaran!los!conocimientos!tales!como!el!análisis!por!elementos!finitos!de!la!estructura!,!para!diseñar!un!chasis!lo!mas!liviano!posible!manteniendo!rigidez.!!Y!se!aplican!los!conocimientos!sobre!las!normas!de!UNE!!de!acotación!para!la!creación!de!los!planos,!y!los!conocimientos!de!fabricación!para!ser!capaz!de!reducir!todo!lo!posible!el!coste!y!peso!del!aparato.!!
! !

! 7!
CAPITULO!2.]!DESCRIPCIÓN!DE!LAS!TECNOLOGIAS!
Hasta!hace!poco,!el!coste!de!equipar!con!un!piloto!automático!a!un!modelo!de!radio!control!era!excesivo.!Sin!embargo,!en! los!últimos!años,!en!el!mundo!del!aeromodelismo!está!sustituyendo!los! clásicos! modelos! de! madera! de! balsa,! (costosos! de! fabricar! y! especialmente! de! reparar)! por!modelos!de!corcho!o!polipropileno!extruido!de!un!coste!muy!bajo,! lo!que!ha!permitido!un!acceso!mucho!mayor!al!hobbie,!que!también!se!ha!visto!afectado!por!la!llegada!de!las!baterías!de!polímero!de! litio! y!motores! sin! escobillas,! que! permiten! una!mayor! eficiencia! y! un!mayor! tiempo! de! vuelo (Bluteau, Briand and Patrouix 2006).!!
!! Al! mismo! tiempo,! debido! a! su! bajo! precio,! se! han! ido! popularizando! plataformas! de!microcontroladores!con!un!entorno!muy!accesible!tales!como!el!Arduino,!o! la!Raspberry!Pi.!Ambos!desarrollos!han!confluido!de!una!forma!natural!en!proyectos!de!código!abierto!para! la!creación!de!sistemas!de!estabilización!y!pilotaje!autónomo.!!
Una!de!estas!comunidades!es!DIYdrones.com.!!El!proyecto!comenzó!como!una!extensión!de!arduino,! que! consistía! de! una! PCB!que! incluía! giróscopos,! acelerómetros! y! un!barómetro.!De! esta!forma,!se!transmite!información!al!arduino!que!procesa!la!señal.!En!los!primeros!diseños,!a!través!del!control!de!radio,!se! le!entrega!una!referencia!y!con!reguladores!PID,!el!avión!adopta!la!orientación!que!se!le!indicaba.!Según!los!diseños!fueron!avanzando,!se!incluyó!un!dispositivo!GPS!lo!que!permitió!conseguir!un!vuelo!autónomo.!!
Debido! a! la! capacidad! de! proceso! de! estos! pequeños! dispositivos,! enseguida! se! pudo!modificar! el! código! para! adaptarlo! a! otras! plataformas,! tales! como! helicópteros! o! coches.! Esta!evolución!ha!permitido! llevar!a!cabo!el!desarrollo!de!una!nueva!plataforma!que!hasta!entonces!no!había!podido!realizarse!!debido!a!su!naturaleza!inestable:!los!multirotores.!!
Un! helicóptero! tradicional! basa! su! funcionamiento! en! un! complicado! mecanismo! de!colectivo! y! cíclico.! En! el! caso! de! los!multirotores! (pueden! tener! desde! 3! rotores! hasta! en! teoría,!infinitos…),!cada!rotor! lleva!una!transmisión!directa!a!su!motor,! logrando!simplicidad!mecánica.!Lo!que!se!traduce!en!un!menor!coste!de!reparaciones!en!caso!de!daño.!
Como! se! verá!mas! adelante,! para! lograr! la! sustentación! es!mas! eficiente! rotar! una! hélice!grande!a!pocas! revoluciones!y!por! tanto,!es!menos!eficiente!el!utilizar!varios! rotores!pequeños!en!vez!de!un!único!rotor!grande.!Sin!embargo,!esta!pérdida!de!eficiencia!se!ve!contrarrestada!por!varias!mejoras! en! la! seguridad.! La! principal! de! ellas! es! la! redundancia.! Si! el! rotor! de! un! helicóptero! se!detiene!la!única!maniobra!posible!para!evitar!el!accidente!es!la!autorrotación!de!las!palas,!fenómeno!por!el! cual!un!helicóptero!puede!planear! sin!motor! invirtiendo!el!paso!del! rotor!principal,!proceso!difícilmente!automatizable.!!Sin!embargo,!en!un!multirrotor!con!un!diseño!correcto,!la!pérdida!de!un!rotor! no! supone!un!problema! tan! grave,! pues! se! puede! conseguir!mantener! la! sustentación! en! el!resto! de! los! motores.! Es! por! ello,! que! recientemente! han! salido! en! las! noticias! compañías! como!AMAZON!o!DHL! las!cuales!promocionan!el!uso!de!un!octocóptero!para! la!entrega!de!paquetería!a!domicilio.!Un!octocóptero!proporciona!total!redundancia!de!sistemas!y!es!capaz!de!llegar!a!volar!con!la! mitad! de! sus! motores.! ! Otra! desventaja! de! un! único! rotor! es! que! ha! de! acumular! grandes!cantidades!de!energía!cinética!debido!a!su!mayor!tamaño,!resultando!en!un!mayor!daño!en!caso!de!impactar.! Por!ello,! los!multirotores!están! siendo!elegidos! recientemente!en!el! ámbito!militar!pues!equipados!con!una!cámara!pueden!proporcionar!reconocimiento!del!terreno!sin!tener!que!recurrir!a!drones!de!ala!fija!mucho!mas!grandes!o!incluso!vehículos!tripulados,!y!sus!altos!costes!asociados.!!
!

! 8!
2.!1!FUNCIONAMIENTO!DE!UN!MULTICÓPTERO!
Los!multicópteros!son!de!los!vehículos!aéreos!mas!simples!en!su!construcción.!Su!funcionamiento!se!basa!en!una!serie!de!ventiladores!axiales!empujando!verticalmente!al!aparato!y!logrando!de!esta!forma!su!sustentación.!Los!multicópteros!son!inestables!por!naturaleza!y!por!tanto,!necesitan!de!un!control!de!estabilización!para!mantenerlos!en!el!aire.!Se!hace!necesario!por!tanto!una!electrónica!de!control,!donde!el!piloto!simplemente!establece!las!referencias!de!velocidades!(Ascenso,!cabeceo,!guiñada!y!alabeo)!para!lograr!la!inclinación!deseada!por!tanto!el!avance!en!esa!dirección.!!
!
2.1.1!CONTROL!DE!POSICIÓN.!
Ya! que! no! existe!movimiento! relativo! entre! los!motores! del! cuadricóptero! y! la! estructura,!para!maniobrar!el!aparato!en!el!aire,!se!observa!que!cuatro!de!los!seis!grados!de!libertad!del!aparato!están!relacionados!entre!si.!Para!describirlos,!utilizaremos!coordenadas!cartesianas!donde!el!plano!!X]Y!es!un!plano!paralelo!al!suelo!y!la!dirección!X!representa!la!parte!delantera!del!vehículo.!!
El!grado!de!libertad!mas!sencillo!de!analizar!es!el!movimiento!en!el!eje!Z,!es!decir,!el!ascenso!y!descenso!vertical.!Este!movimiento!se!consigue!acelerando!todas! las!hélices!al!mismo!tiempo,!de!tal! forma!que! todas! las! fuerzas! estén! en! equilibrio.! La! aceleración!máxima! en! sentido! ascendente!será!
!
! !! + !! + !! + !! −!!"!!!!"!
= !! (1)!
!
Donde!!1,!2,!3!!!!4 !representan! la! fuerza! máxima! que! serán! capaces! de! hacer! los!rotores,! mientras! que! la! ! ! descendente! vendrá! dado! por! la! fuerza! de! la! gravedad,! atendiendo! la!colocación!de!los!motores!a!la!figura!5.!
El!movimiento!en!el!plano!XY!se!logra!con!lo!que!se!conoce!como!un!empuje!diferencial,!por!ello,!los!grados!de!libertad!están!relacionados.!La!rotación!en!el!eje!X!es!proporcional!a!la!velocidad!en!el!eje!Y!mientras!que!el!avance!en!el!eje!X!es!logrado!con!una!rotación!en!el!eje!Y.!Es!decir,!para!lograr!el!avance,!los!motores!2!y!3!deberán!realizar!un!empuje!mayor!que!los!motores!1!y!4.!!
La!aceleración!angular!máxima!para!el! cabeceo! (eje!Y)desde! la!posición!de!equilibrio!viene!dada!por:!
! !! + !! · ! = ! · !! (2)!!
Mientras!que!para!el!alabeo!(Eje!X)!viene!dada!por:!
! !! + !! · ! = ! · !! (3)!!
Donde! Las! fuerzas!!1,!2!!!!3!se! asumen! como!máximas! para! el! caso! estudiado! e! I! es! el!momento!de! inercia!en!el!eje!correspondiente!que!podrán!ser!estimados!con!el!diseño!en!CAD!del!

! 9!
aparato.!De!este!simple!estudio!podemos!derivar!parámetros!de!diseño!ya!que!se!comprueba!como!un!brazo!mas!largo!puede!ayudar!a!proporcionar!un!mejor!control.!
!
!
FIGURA!5!–!DIRECCIÓN!DE!GIRO!DE!LOS!ROTORES!Y!DIRECCIÓN!DE!LAS!FUERZAS!
La!velocidad!máxima!del!aparato!vendrá!determinada!por!dos! factores;! la!sustentación!del!aparato,!y!la!resistencia!del!aire.!Debido!a!la!complejidad!del!análisis!aerodinámico!del!aparato,!no!se!determinará!la!forma!analítica!la!resistencia!aerodinámica!del!aparato.!!
También!podemos!determinar!la!inclinación!máxima!que!puede!mantener!el!aparato!manteniendo!la!altitud!y!por!tanto!su!aceleración!lineal!máxima.!!
! !!"# = !"!!! !!"! · !!!"#
!(4)!
!
!
siendo!!!"# = !! + !! + !! + !!!
conocido!el!ángulo!podremos!determinar!ahora!su!aceleración!lineal!máxima!
! !!"# =!!"# · sin !!"#
!!"!!
(5)!
!
!

! 10!
2.1.2!CONTROL!DE!LA!GUIÑADA!
Al!igual!que!en!un!helicóptero!se!hace!necesario!un!rotor!de!cola!para!contrarrestar!el!par!ejercido!por!la!palas,!el!mismo!problema!ocurre!en!un!multicóptero,!y!por!ello!existen!varias!formas!de!lidiar!con!este!problema.!
Lo!mas!corriente!en!un!multicóptero!es!tener!un!número!par!de!hélices,!por!lo!que!lo!mas!común!para!controlar!la!guiñada!es!hacer!girar!la!mitad!de!los!motores!en!sentido!contrario!a!la!otra!mitad,!de!esta!forma!los!pares!de!reacción!producidos!por!las!hélices!se!contrarrestan!entre!si.!El!inconveniente!de!este!método!es!la!necesidad!de!contar!con!dos!tipos!distintos!de!hélices.!Debido!a!que!las!hélices!tienen!un!perfil!aerodinámico!concreto,!no!basta!simplemente!con!poner!las!hélices!del!revés,!pues!aunque!se!generaría!empuje,!no!seria!eficiente.!!
Otro!método,!consiste!en!girar!todos!los!motores!en!el!mismo!sentido!y!generar!el!contra]par!con!alguna!característica!de!diseño.!El!principal!método!consiste!en!inclinar!todos!los!rotores!respecto!de!la!vertical!para!contrarrestar!el!par!producido!por!las!hélices!(Figura!6)!(Phang, et al. 2012 ).!De!esta!forma,!al!igual!que!en!el!caso!anterior,!podemos!controlar!la!guiñada!variando!la!velocidad!de!dos!de!los!cuatro!rotores!(en!el!caso!del!cuadricóptero).!!
!
FIGURA!6!–!ESQUEMA!DE!COLOCACIÓN!DE!CUATRO!HÉLICES!ROTANDO!EN!LA!MISMA!DIRECCIÓN!
La! alternativa,! manteniendo! las! cuatro! hélices! rotando! en! la! misma! dirección! consiste! en!aplicar!un!método!similar!al!introducido!anteriormente,!donde!a!uno!de!los!rotores!se!le!da!un!grado!de! libertad!de!giro!perpendicular!al!brazo.!Este!grado!de! libertad!es!controlado!por!un!servomotor!unido!al! control!de!vuelo,!y! según! la! rotación!del!motor,! se!consigue!una!guiñada!en!un!sentido!u!otro.!Cabe!destacar!que!la!posición!de!reposo!del!motor!no!es!paralela!con!el!resto!de!motores,!sino!que!esta!rotada!para!evitar!una!guiñada! indeseada.!Esta! forma!de!controlar! la!guiñada!es!utilizada!especialmente!en!tri]rotores,!donde!se!hace!necesaria!algo!mas!de!complejidad!mecánica!para!poder!controlar!la!guiñada.!!
La!ultima!alternativa!consiste!en!colocar!superficies!de!control!a!la!salida!que!redireccionen!el! flujo!de!aire! saliente!de! la!hélice! y!proporcionen!un! contrapar.! La! variación!del! ángulo!de!estas!superficies!conseguirá!el!movimiento!de!guiñada.!!
En! nuestro! caso,! se! utilizará! el! primer!método! descrito.! Ya! que! el! objetivo! buscado! es! la!simplificación!del!diseño!tanto!mecánico!como!aerodinámico.!!
! !

! 11!
CAPITULO!3.]!DESCRIPCION!DEL!ALGORITMO!DE!OPTIMIZACION!
Tras! determinar! el! principal! problema! de! los! multirotores,! deberemos! seleccionar! los!componentes!de! la!mejor!manera!posible! para! intentar! lograr! la!mayor! autonomía!de! vuelo.! Para!ello,!primero!deberemos!definir!las!características!aerodinámicas!de!nuestro!aparato.!
!
3.0.1!PARÁMETROS!MECÁNICOS:!
El! peso! total! del! aparato! se! puede! modelar! como! la! suma! de! todos! sus! componentes!principales,!es!decir,! la!estructura,! la!batería,! la!electrónica,! los!motores!y! las!hélices.!Debido!a! las!altas!intensidades!que!circulan!por!los!cables!y!la!cantidad!necesaria,!añadiremos!coeficiente!de!1.1!!respecto! al! peso! obtenido! de! la! suma! de! la! estructura! obtenida! en! el! CAD! más! el! peso! de! los!componentes,!menos!en!la!batería.!Este!es!un!parámetro!obtenido!de!la!construcción!del!prototipo,!donde! apareció! una! discrepancia! de! alrededor! de! un! 10%! pues! en! el! diseño! no! se! incluyeron!elementos!tales!como!la!tornillería!o!el!peso!del!cableado.!De!esta!forma!el!peso!total!resulta:!
! !!"! = 1.1 !!! !!"# + !!"# + !!"# + !!"# + !"#$%"&! (6)!!
Donde!!! !es! el! número! de! rotores,!!!"# !el! peso! de! un! motor,!!!"# ,! el! peso! de! los!controladores!de!velocidad,!!!"#!el!peso!de!la!batería!y!!"#$%"&!la!carga!que!se!desee!transportar.!
!
ANÁLISIS!DIMENSIONAL!!
Para!obtener!la!ecuación!de!la!fuerza!de!la!hélice,!se!lleva!a!cabo!un!análisis!dimensional.!Los!parámetros!a!considerar!serán:!
Parámetro! Símbolo!! Unidades!!"á!"#$%!!"!!"!ℎé!"#$! !! !!!"#$%&'('!!"!!"!ℎé!"#$! !! !"#/!!
!"#! !! !"!!"#$%&! !"! !!
!"#$%&'&!!"#!!"#$%&! !"! !"/!!!!"#$%#"&'&!!"#!!"#$%&! !! !!/! !!
!"#$%"!!"!!"#$%&'()(*(+,+! !! !/!!!!"#$%&'('!!"#!!"!#!$%! !!! !!/! !!
!
! ! = ! !; !; !!; !;!; !" = !"#$%&#%'! · !!! · !! · !! · !! · !! · !!!! (7)!!
en!forma!dimensional!!
! ! · !! · !!!! = [!! · !!! · ! · !!!! ! · !! · !!! ! ! · !!! · !!! ! ! · !!!! !]! (8)!!
por!tanto,!el!sistema!de!ecuaciones!se!plantea!de!la!siguiente!manera:!

! 12!
!
! ! !1 = ! + !!! !1 = ! − 3 · ! + 2 · ! − ! + !!
! !2 = ! + ! + 2 · ! + !!!
(9)!
despejando!para!!, !!!!!!
!
! ! = 4 − 2 · ! − 2 · ! − !!! = 2 − ! − 2 · ! − !!
! = 1 − !!(10)!
!
sustituyendo!en!(7)!
!
! !" = !"#$%&#%' · !!!!!!!!!!! · !!!!!!!!! · !!!! · !! · !! · !!!
= !"#$%&#%' · !!! · !! · !!! · !!! · !! · !
!· !!! · !
!· !!! · !!
!!
(11)!
!
por!tanto,!las!constantes!
!!! · !! · !! ! ,
!!! · ! ! ,
!!! · !! !
!
corresponden! a! constantes! adimensionales! como! el! número! de!mach! en! la! punta! de! la! hélice,! el!número!de!Reynolds!y!el!paso!de!la!hélice (Brandt and Selig 2011).!
Y!por! tanto,! tomando! las!constantes!y! los!números!adimensionales!como!constantes! llegamos!a! la!siguiente!ecuación:!
! !" = !! · !! · !! · !!! (12)!!
!
Por!tanto,!al!realizar! los!ensayos!de!las!hélices,! lo!correcto!es!hallar!el!parámetro!“Ct”!para!las!distintas!rpm (Ananda 2008).!Sin!embargo,!el!hacerse!con!multitud!de!hélices!y!motores,!!llevaría!excesivo! tiempo,! por! tanto,! se! recurre! a! bases! de! datos! online! que! proporcionan! una! fiabilidad!suficiente!para!hacer!una!primera!aproximación.!Sin!embargo,! la!forma!en! la!que!están!dado!estos!ensayos!es!la!siguiente:!
! !" = ! · !"!!! (13)!!
Quedando!la!curva!como!en!la!figura!7,!donde!se!ha!ajustado!la!nube!de!puntos!obtenida!en!el!banco!de!ensayos!con!una!ecuación!como!la!(13)!

! 13!
!
FIGURA!7!]!AJUSTE!DE!LA!FUERZA!DE!EMPUJE!VS!RPM!
Donde!A!y!B!son!parámetros!obtenidos!empíricamente!del!banco!de!ensayos.!Nótese!que!la!velocidad!angular!no!esta!elevada!al!cuadrado!como!en!el!análisis!dimensional,!esto!es!debido!a!que!se!asume!que!la!constante!adimensional!“!!”!es!función!de!la!velocidad.!
!
FIGURA!8!–!EMPUJE!VERTICAL!Y!TORSOR!VS!RPM!

! 14!
Obsérvese! que! en! este! caso,! se! utiliza! la! variable! RPM! en! lugar! de! utilizar! otras! unidades!tales! como! los! rad/s,! ya! que! es! una! unidad! con! la! que! se! esta! mas! familiarizado! y! permite! así!comprobar!fácilmente!ordenes!de!magnitud.!
��� ��� ������ ������ ���� ��� ��� �������� ������� ����� ��� ����"�� ��� ����������������������������!�����
! ! = !! · !! · !"!! · !!! (14)!�
���� ������������������������������������������������� ��������������������������#���������������������������������� ���$!"%������������������������������������������������������"������������������� ����������������������������������
! ! = ! · !"!!! · !!! (15)!�
!
FIGURA!9!–!PAR!VS!RPM�
��� ��� ������� �� ���� �� �������� ������� ������� ������ �� ������������� ��� ������������� �����
� ! !! = ! · !! (16)!�
� �

! 15!
�
3.0.2!PARÁMETROS!ELÉCTRICOS!
El!esquema!eléctrico!del!aparato!es!el!siguiente(Figura!10):!
!
FIGURA!10!–!ESQUEMA!ELÉCTRICO!
Actualmente! los! motores! BLDC! (Brushless! Direct! Current)! de! radiocontrol! se! clasifican!principalmente!atendiendo!al!parámetro!!!!,!siendo:!
! !! =!"#!"#$%"&!
(17)!
!

! 16!
!
sabemos!que:!
! !! =30
!! · !!
(18)!
!
!De!esta!forma!obtenemos!el!parámetro!!!:!
! !! =!"#
!"#$%&'(!(19)!
!
Conociendo!las!velocidad!angular!y!la!fuerza!necesaria!podemos!ahora!relacionarlos!con!la!tensión!y!la!corriente!de!cada!motor.!
! !"#!!
= !! !(20)!
! ! !! !
!!= !! !
(21)!
!
Donde!!"!es!la!Tensión!de!entrada!y!!"!es!la!corriente.!Sin!embargo,!deberemos!considerar!la! resistencia! de! conectores! y! cables! a! la! entrada! al! igual! que! la! resistencia! de! los! conectores! por!tanto! quedando! las! ecuaciones! de! la! siguiente! manera,! siento!!"!la! resistencia! de! conectores! y!cables:!
! !"#!!
= (!! − !! · !)!(22)!
!
En! el! término!!! !también! se! incluye! la! resistencia! interna! de! la! batería.! En! general,! las!baterías!de!litio,!ven!determinada!su!capacidad!de!descarga!máxima!debido!a!la!resistencia!interna.!Sin!embargo!no!es!un!dato!típicamente!proporcionado!por!los!fabricantes.!No!existe!un!estándar!por!el! que! clasificar! la! calidad! de! las! baterías! de! aeromodelismo! y! las! diferencias! entre! baterías! de!distintos!precios!no!están!claras.!Por!ello,!se!equipa!al!prototipo!con!sensores!de!tensión!y!corriente.!De!la!misma!forma,!se!equipa!el!banco!de!ensayos!con!medidores!de!corriente.!Ya!que!la!ley!de!ohm!es!lineal,!lo!primero!que!deberemos!hacer!es!una!gráfica!de!la!corriente!respecto!a!la!tensión!en!el!banco!de!ensayos!(Figura!11).!Una!vez!determinada!la!linealidad,!también!se!debe!comprobar,!que!la!resistencia!de!la!batería!no!varia!a!lo!largo!de!su!ciclo!de!descarga.!Para!ello,!se!realiza!un!vuelo!de!prueba! del! prototipo.! ! Para! comprobar! este! parámetro,! tras! el! vuelo! de! prueba,! de! los! datos!obtenidos! dividimos! la! tensión! entre! la! corriente! medida.! De! esta! forma,! comprobamos! como! la!resistencia!interna!de!la!batería!es!constante.!!

! 17!
!
FIGURA!11]!TENSIÓN!VS!CORRIENTE!
!
FIGURA!12!–!RESISTENCIA!DE!LA!BATERIA!(VUELO!DEL!PROTOTIPO)!

! 18!
Asimismo,! deberemos! tener! en! cuenta! la! corriente! que! consume! el! motor! sin! carga,! que!representa!la!corriente!de!vacío!“!!”!
Resultando!la!ecuación!(21)!en:!
! ! = !!!! − !!!!! (23)!!
de!donde!despejando!
! ! + !!!!!!!
= !! !(24)!
!
Como!se!puede!apreciar!en!el!ensayo!de!una!hélice!(figura!13)!el!consumo!eléctrico!depende!de!la!velocidad!de!giro!de!la!hélice.!Nótese!que!los!picos!de!corriente!corresponden!al!par!necesario!para!acelerar!la!hélice.!
De!esta!forma!podemos!calcular!la!potencia!eléctrica!de!entrada!como!
! !!,!"#$%&% = !! · !! ! (25)!!
!
FIGURA!13!–!CONSUMO!ELÉCTRICO!EN!RELACIÓN!A!VELOCIDAD!ANGULAR!
Las!baterías!de! litio!destinadas!a! los!usos!del!radiocontrol!están!clasificadas!principalmente!por!tres!parámetros:!Número!de!celdas!en!serie,!capacidad!y!capacidad!de!descarga.!Todas!las!celdas!

! 19!
tienen!una!tensión!nominal!de!3.7V!sin!embargo,!según!el!estado!de!carga,!puede!variar!entre!3.0V!(Descargada)!hasta!4.2(Completamente!cargada).!La!capacidad!viene!dada!en!“mAh”!(Miliamperios]hora),!actualmente!el!mercado!es!muy!diverso!y!se!encuentra!baterías!en!casi!todos!los!valores!hasta!alrededor!de!lo!10000!mAh.!Por!ultimo,!la!capacidad!de!descarga!viene!dada!en!“C”!(Capacidades),!es!decir!una!batería!de!2200!mAh!y!20C!puede!proporcionar!una!corriente!continuada!de!
2200!!"ℎ · 20!! = 44!!"#$%&'(!
Sin! embargo,! según! el! fabricante,! también! puede! especificar! un! valor! de! “C”!máximo! que!podremos!superar!durante!unos!pocos!segundos.!!
!
3.0.3!OTROS!PARÁMETROS!
Podemos!ahora!obtener!parámetros!que!luego!serán!relevantes!en!el!estudio!del!algoritmo,!tales!como!la!eficiencia!del!motor:!
! !!"# =!!"#!!"!
!(26)!
O!la!duración!de!la!batería!:!
! !"#$%&'( = !!!"#"$%&"&1000
! (27)!
!
Asimismo,! ya! que! contamos! con! los! precios! de! los! componentes,! se! procede! a! incluir! el!precio!total!en!cada!caso,!para!en!un!futuro!poder!limitar!la!viabilidad!del!caso!por!precio.!El!precio!total!de!los!componentes!en!este!caso!seria:!
! !"#$%&!"! = !!! ! !"#$%&!"# + !"#$%&!"# + !"#$%&!"#! (28)!
Nótese!que!en!el!precio!de!la!estructura!no!se!incluye!pues!en!este!punto!del!proyecto!se!desconoce.!
3.0.4!DATOS!DE!PARTIDA!
Para!poder!desarrollar!y!posteriormente!comprobar!el!algoritmo,!deberemos!indexar!en!una!!base!de!datos!los!componentes!necesarios.!Los!componentes!que!afectaran!a!nuestra!autonomía!son!batería,!motores!y!hélices.!Para!ello,!se!accede!a!proveedores,!preferiblemente!!en!Europa!(facilidad!de!envio)!y!se!realiza!una!tabla!!para!cada!tipo!de!componente!con!las!características!necesarias!para!su!caracterización.!!
Para!los!motores,!indexamos:!nombre,!tensión!máxima,!corriente!máxima,!KV,!peso!y!precio.!En!el!caso!de!las!baterías,!indexamos:!nombre,!número!de!celdas,!Capacidad!,Capacidad!de!descarga!continua!y!máxima,!resistencia!interna,!peso!y!precio.!Por!ultimo,!para!la!hélice,!se!indexa:!nombre,!diámetro,!avance,!peso!y!precio,!además!de!los!parámetros!de!la!ecuación!de!la!fuerza!y!el!par.!!
Tras!realizar!estas!tablas!en!una!hoja!de!datos,!se!importan!como!“Dataset”!a!Matlab!donde!se!procederá!a!su!análisis.!!
! !

! 20!
3.1!ALGORITMO!
Generalmente! a! la! hora! de! desarrollar! cuadricópteros,! los! estudios! se! han! centrado! en! el!control! del! aparato,! mientras! que! poco! se! ha! tratado! sobre! la! óptima! elección! de! componentes.!Existen! autores! que! han! desarrollado! algoritmos! de! optimización! (Bouabdallah 2007),! donde! las!limitaciones!se!han!dado!por!tamaño!y!peso!máximo.!A!pesar!de!que!son!buenas!aproximaciones!al!objetivo!de!este!proyecto,!los!métodos!propuestos!hasta!ahora!no!se!ciñen!a!lo!que!se!busca!y!por!tanto!se!decide! la!generación!de!un!algoritmo!propio!para! la!optimización!de! los!componentes!en!función!del!peso!se!quiera!transportar.!
Para! realizar! el! algoritmo,! analizaremos! todas! las! combinaciones! posibles! de! los! tres!componentes.!Para!ello!se!anidan!tres!bucles,!con!el!cálculo!de!parámetros!en!el!bucle! interno.!De!esta! forma! se! recorre! la! base! de! datos! de! cada! componente! en! combinación! con! el! resto! de!elementos.!Antes!de! iniciar!el!primer!bucle,! se!declara! la!variable!!"!para! introducir!el!número!de!rotores,! haciendo! así! el! algoritmo! mas! versátil,! posibilitando! el! ! calculo! para! otro! tipo! de!multirrotores.!También!se!declara!el!peso!de!la!estructura!(!"#$),!y!el!peso!a!transportar!(!"#$%!").!!
Posteriormente! se! inician! los! bucles,! siendo! el! exterior! el! de! la! bateria,! seguido!por! el! del!motor!y!por!ultimo! la!hélice.!De!esta!forma!se!consiguen!aparejar!todos! los!componentes!entre!si.!Posteriormente! se! procede! a! cargar! en! el! workspace! las! variables! desde! los! dataset.! Debido! a! la!naturaleza!empírica!de!los!datos!de!empuje!de!las!hélices,!solo!se!incluyen!en!el!algoritmo!aquellas!que!se!han!ensayado!de!una!forma!fiable,!ahorrando!así!tiempo!de!cálculo!y!afinando!los!resultados.!!
En! este! punto! se! calcula! el! peso! total! utilizando! la! ecuación! (6)! que! será! utilizado! para! el!resto!de! la! iteración.! En!el! algoritmo!analizaremos! tres! casos,! el! primero,! en!hover! (Levitación),! el!siguiente!a!máxima!potencia!de! los!motores! y!por!ultimo!en!el!punto!de!máxima!eficiencia!de! los!motores.!Esto!se!hace!para!simular!distintas!posiciones!de!vuelo!según!el!uso!que!se!vaya!a!dar!al!aparato.!
3.1.1!CÁLCULO!DE!PARÁMETROS!EN!HOVER!
Primero! se! divide! el! peso! total! entre! el!!! !(número! de! rotores),! de! esta! forma! con! la!ecuación! (13)!con!sus! respectivos!parámetros,!podremos!calcular! las! rpm!a! las!que!deberá!girar! la!hélice! para! sustentar! este! peso.! ! Con! la! ecuación! (15)! ! hallamos! el! par! y! por! tanto! estamos! en!disposición! de! conocer! la! potencia! mecánica.! De! esta! forma,! con! el! parámetro!!! !se! conoce! la!intensidad!que!habrá!de!necesitar!el!motor!(19)!.!Asimismo,!se!deducen!la!tensión!de!la!batería!y!la!tensión!efectiva!en!bornes!del!motor.!Por!último,!la!duración!de!la!batería!es!calculada!dividiendo!el!amperaje!del!motor!entre!la!capacidad!de!la!batería!y!entre!el!número!de!rotores.!Podemos!calcular!parámetros! adicionales! para! el! posterior! control! del! aparato,! tales! como! el! porcentaje! de! carga! a!aplicar!en!el!motor!o!la!longitud!del!pulso!a!aplicar!para!conseguir!la!velocidad!deseada,!sin!embargo!no! se! tratará! en! este! proyecto.! Todos! los! datos! obtenidos! son! guardados! en! una! variable! de! tipo!estructura!para!su!posterior!análisis!
3.1.2!CÁLCULO!DE!PARÁMETROS!A!MÁXIMA!POTENCIA!!
En! este! caso,! al! realizar! la! simplificación! de! los! BLDC! como! motores! de! continua!tradicionales,!asumiremos!que!el!máximo!se!da!al!aplicar!toda! la!tensión!de! las!baterías!en!bornes!del! motor.! En! este! caso! necesitaremos! resolver! el! siguiente! sistema! de! ecuaciones! ! donde!!!!

! 21!
representa! una! constante! empírica! que! viene! determinada! por! la! densidad! del! aire! y! por! el! perfil!aerodinámico!de!la!hélice.!
!
! !"# = !! · !!"#!" = !! · !"#$ℎ · !! · !"!!
! = !! +!!!
!!"# = !!"# − ! · !!"!
! (29)!
!
Una! vez! hallada! la! solución,! al! igual! que! con! el! primer! caso,! se! calcula! la! duración! de! la!batería!y!otros!parámetros!de!menor!importancia!en!este!caso,!como!la!fuerza!total!y!se!procede!a!guardar!las!variables!en!la!estructura.!
3.1.3!CÁLCULO!DE!PARÁMETROS!A!MÁXIMA!EFICIENCIA!
La!intensidad!de!un!motor!en!el!punto!de!máxima!eficiencia!viene!determinada!hallando!el!máximo!de!la!ecuación!(26)!sustituyendo!las!potencias!mecánicas!por!el!producto!de!la!ecuación!(23)!y!(22)!y!la!eléctrica!por!la!ecuación!(25).!!Para!ello!asumiremos!unas!condiciones!de!vuelo!del!80%!de!régimen! de! motor,! representado! por! el! parámetro!!".! De! esta! forma,! el! aparatro! podrá! tener!potencia!suficiente!para!poder!lidiar!con!perturbaciones.!
!!!"#$ = !
!!"# · !" · ! !!(!! + !!"#)
!(30)!
!
Partiendo! de! la! ecuación! anterior,! multiplicando! por! Kt! hallaremos! el! par! disponible! para!mover!la!hélice:!
! ! = !!"#$ − !! · !!! (31)!!
Por! tanto,! ahora! deberemos! hallar! la! tensión! efectiva! que! esta! disponible! en! bornes! del!motor!!
! !!"# = !!"# − !!"#$ · (!! + !!"#) !!
(32)!
!! !"# = !!"# · !!! (33)!!
! !!"# = !"# · 2 · !60 · !!(34)!
!
! !!"! = !!"# · !!"#$! (35)!!

! 22!
! !!"# =!!"#!!"!
!(36)!
!
Una!vez!hallados!estos!parámetros,!al!igual!que!en!los!casos!anteriores,!se!puede!determinar!la! fuerza! ,! la! eficiencia! y! la! duración! de! la! batería.! De! esta! forma! obtenemos! la! combinación! de!componentes!que!proporcionan!la!máxima!eficiencia!cuando!se!comanda!al!vehículo!a!avanzar!a!la!máxima!velocidad!posible,!es!decir,!el!caso!de!interés.!
3.1.4!VIABILIDAD!DEL!CASO!
Tras!obtener!todos!los!parámetros!de!los!distintos!casos,!deberemos!comprobar!si!los!casos!obtenidos! son! compatibles! con! las! características! mecánicas! y! eléctricas! de! los! distintos!componentes.!Para!ello,!se!añade!una!variable!binaria,!que!adopta!el!valor!1!si!el!caso!es!viable!y!0!en!caso!contrario.!Por!defecto,!se!le!asigna!al!caso!viabilidad!positiva,!para!evitar!descartar!un!caso!viable!por!equivocación.!!
Los!casos!en!los!que!el!algoritmo!asigna!viabilidad!negativa!son:!
• Corriente!en!hover!superior!a!la!capacidad!continua!de!descarga!de!la!batería!• Corriente!de!máxima!eficiencia!!superior!a!la!capacidad!continua!de!descarga!de!la!batería!• Corriente!máxima!del!motor!superior!a!la!capacidad!de!descarga!máxima!de!la!batería!• Tensión!de!la!batería!superior!a!la!tensión!nominal!del!motor!• Corriente!máxima!superior!a!la!capacidad!máxima!de!descarga!de!la!batería!• Fuerza!en!hover!mayor!que!en!máxima!eficiencia!o!máxima!potencia!
De! esta! forma,! se! asegura,! que! en! el! resultado! obtenido,! el! punto! de! trabajo! de! mayor!eficiencia!es!superior!al!punto!de!“hover”,!logrando!de!esta!forma!un!avance!eficiente.!
Asimismo,! descartamos! tensiones! de! la! batería! un! 15%!menor! al! valor! nominal! y! valores!negativos!de!tensiones!y!corrientes,!pues!son!casos!dados!por!la!matemática!del!algoritmo,!que!sin!embargo!carecen!de!lógica!física.!!
3.1.5!PROCEDIMIENTO!DE!FILTRADO!
Como! es! lógico,! al! indexar! 100!motores,! 71! hélices! y! 154!modelos! de!motor,! obtenemos!107801!set!de!resultados,!no!todos!ellos!factibles.!Para!ello,!se!crea!un!script!(Anexo!B)!para!filtrar!únicamente! los! casos! viables! y! ordenar! los! casos! según! el! parámetro! deseado.! Para! ello,!simplemente!copiamos!los!casos!viables!en!una!nueva!estructura.!Y!procedemos!a!buscar!el!máximo!de!la!duración!de!batería!en!hover,!máxima!potencia!y!eficiencia!optima.!
! !

! 23!
CAPITULO!4.]!ANÁLISIS!DE!LOS!RESULTADOS!
Tras!ejecutar!el!algoritmo!y!posteriormente!el! script,!procedemos!a!ordenar! los! resultados!por!las!duraciones!máximas!de!batería.!Para!el!caso!mostrado!hemos!asumido!un!peso!de!760!g!para!la! estructura,! que! como! se! verá!mas! adelante! es! un! parámetro! obtenido! del!modelo! CAD,! y! una!carga!útil!de!500g!(Parámetro!de!diseño)!.!El!peso!de!la!estructura!viene!determinado!por!el!diseño!del! aparato,! que! se! verá! mas! adelante,! mientras! que! la! carga! útil! es! un! parámetro! de! diseño.!!Debemos!tener!en!cuenta,!que! los!resultados!que!obtendremos!serán!optimistas,!pues! !aunque!se!están! considerando! pérdidas! eléctricas! y! mecánicas! en! el! aparato,! se! están! despreciando!imperfecciones!en!la!hélice!,en!el!motor!y!resistencias!en!el!conexionado!entre!otros.!Sin!embargo,!el!algoritmo!representa!un!buen!punto!de!partida!para!lograr!un!cuadricóptero!de!alta!eficiencia!y!alta!autonomía.!El!algoritmo!en!este!caso!no!ha!sido!limitado!por!precio,!pues!se!dispone!del!presupuesto!necesario! para! lleva! a! cabo! el! prototipo.! Para! el! caso! de!mayor! eficiencia! en! hover! obtenemos! el!resultado!de!la!tabla!1.!
! !

! 24!
!
!!!!!!!!BATERIA! !NCR18650B!4S2P! !!
!!!!!!!!!!MOTOR!!!Turnigy!Multistar!4822]490Kv!22Pole!Multi]Rotor!Outrunner! !!
!!!!!!!!!Helice!!GWS!EP!Counter!Rotating!Propeller!(RH]1047!255x119mm)!Black!(6pcs/set)! !!
!!!!!!!!Pmothov! 0,5319! !"!!!!!!!!!!Rpmhov! 4928! !"#!!!!!!!!!!!!Whov! 516,0587! !"#/!!!!!!!!!!!!!Phov! 35,3768! !!!!!!!!!!!!!Jhov! 0,0686! !"!!!!!!!!!!!!Ihov! 4,0654! !!!!!!!!!!!!!Vhov! 13,8528! !!!!!!!!!!!!!Vmot! 10,8449! !!!!!!!!!!Dbathov! 25,0895! !"#!!!!!!!!!!!!!Pth! 73,2863! %!!!!!!!!!!RPMmax! 6609,5! !"#!!!!!!!!!!!!Wmax! 63116! !"#/!!!!!!!!!!!!!Pmax! 85,3504! !!!!!!!!!!!!!Jmax! 6,3276! !"!!!!!!!!!!!!Imax! 6,8754! !!!!!!!!!!!!!Fmax! 998,3676! !!!!!!!!!!Dbatmax! 14,8355! !"#!!!!!!!!!!!!Ieff! 5,3134! !!!!!!!!!!!!!Jeff! 0,0929! !"!!!!!!!!!Vbateff! 13,7155! !!!!!!!!!!!RPMeff! 5314! !"#!!!!!!!!!!!!Weff! 556,4809! !"#/!!!!!!!!!!!!!Peff! 75,9814! !!!!!!!!!!!Ptheff! 79,0702! %!!!!!!!!!Dbateff! 19,1968! !"#!!!!!!!!!!!!Feff! 625,3048! !!!!!!Preciototal! 224,28! €!!!!!!VIABILIDAD! 1! !!
TABLA!!1!]!RESULTADOS!EN!"HOVER"!
Como!podemos!comprobar,!el!resultado!es!un!motor!de!bajas!!!!es!decir,!un!motor!lento,!y!una! hélice! grande.! Este! resultado! es! coherente! con! la! ecuación! (12)! pues! para! lograr! un! mayor!empuje,! sale! mas! rentable! aumentar! el! tamaño! de! la! hélice! y! disminuir! la! velocidad! angular! del!motor.! !Asimismo,!el! algoritmo!elige! la!batería!de!máxima! capacidad!disponible.! Esto! supone!otro!ventaja,!al!depender!la!capacidad!de!descarga!de!la!capacidad!de!la!batería,!no!hace!falta!elegir!una!batería!de!muchas!“C”,!disminuyendo!el!precio!de!la!batería.!!

! 25!
Dependiendo! del! tipo! de! vuelo! deseado,! es! posible! que! aparezcan! perturbaciones!desfavorables,!pues!en!una!actitud!en!vuelo!horizontal,!los!motores!han!de!funcionar!en!un!punto!de!trabajo!mayor! ya! que! se! ha! de! sustentar! el! peso! y! además! proporcionar! un! avance.! Por! ello,! nos!vemos! en! la! situación! de! obtener! los! componentes! que! proporcionarían! una!mayor! autonomía! a!máxima!potencia!en!vuelo!horizontal!(tabla!2).!
!!!!!!!!BATERIA! !NCR18650B!4S2P! !!
!!!!!!!!!!MOTOR!!4108]480KV!Turnigy!Multistar!22!Pole!Brushless!Multi]Rotor!Motor!With!Extra!Long!Leads! !!
!!!!!!!!!Helice!!GWS!EP!Counter!Rotating!Propeller!(RH]1047!255x119mm)!Black!(6pcs/set)! !!
!!!!!!!!Pmothov! 0,5462! !"!!!!!!!!!!Rpmhov! 4,99E+03! !"#!!!!!!!!!!!!Whov! 522,4817! !"#/!!!!!!!!!!!!!Phov! 36,7142! !!!!!!!!!!!!!Jhov! 0,0703! !"!!!!!!!!!!!!Ihov! 4,2626! !!!!!!!!!!!!!Vhov! 13,8311! !!!!!!!!!!!!!Vmot! 10,6473! !!!!!!!!!!Dbathov! 23,9292! !"#!!!!!!!!!!!!!Pth! 76,5039! %!!!!!!!!!!RPMmax! 6,48E+03! !"#!!!!!!!!!!!!Wmax! 6,19E+04! !"#/!!!!!!!!!!!!!Pmax! 80,6069! !!!!!!!!!!!!!Jmax! 5,9666! !"!!!!!!!!!!!!Imax! 6,6971! !!!!!!!!!!!!!Fmax! 958,3787! !!!!!!!!!!Dbatmax! 15,2306! !"#!!!!!!!!!!!!Ieff! 5,8284! !!!!!!!!!!!!!Jeff! 0,1014! !"!!!!!!!!!Vbateff! 13,6589! !!!!!!!!!!!RPMeff! 5,11E+03! !"#!!!!!!!!!!!!Weff! 535,1935! !"#/!!!!!!!!!!!!!Peff! 83,3462! !!!!!!!!!!!Ptheff! 77,9518! %!!!!!!!!!Dbateff! 17,5005! !"#!!!!!!!!!!!!Feff! 575,1244! !!!!!!Preciototal! 221,76! €!!!!!!VIABILIDAD! 1! !!
TABLA!!2!]!RESULTADOS!A!MÁXIMA!POTENCIA!
! !

! 26!
Como!se!comprueba,!los!resultados!son!similares!al!caso!anterior,!con!la!excepción!de!utilizar!un!modelo!de!motor!de!menos!revoluciones.!!
Por!último,!el!algoritmo!devuelve!el!funcionamiento!del!aparato!en!máxima!eficiencia!al!80%!de! su!potencia! total,! de! esta! forma,! lograremos!un! avance!eficiente! con!potencia!de! reserva!para!poder! contrarrestar! posibles! perturbaciones.! En! este! caso,! el! motor! ha! de! tener! unas!!! !muy!parecidas!al!caso!anterior.!!El!hecho!de!que!los!ambos!resultados!se!distinguen!solo!en!el!motor,!con!una! diferencia! de! parámetros! mínima! indica! que! los! resultados! son! válidos! para! el! peso!determinado.!!
!!!!!!!!BATERIA! !NCR18650B!4S2P! !!
!!!!!!!!!!MOTOR!!3508]580KV!Turnigy!Multistar!14!Pole!Brushless!Multi]Rotor!Motor!With!Extra!Long!Leads! !!
!!!!!!!!!Helice!!GWS!EP!Counter!Rotating!Propeller!(RH]1047!255x119mm)!Black!(6pcs/set)! !!
!!!!!!!!Pmothov! 0,5363! !"!!!!!!!!!!Rpmhov! 4,95E+03! !"#!!!!!!!!!!!!Whov! 518,0447! !"#/!!!!!!!!!!!!!Phov! 35,7868! !!!!!!!!!!!!!Jhov! 0,0691! !"!!!!!!!!!!!!Ihov! 4,6828! !!!!!!!!!!!!!Vhov! 13,7849! !!!!!!!!!!!!!Vmot! 10,8715! !!!!!!!!!!Dbathov! 21,782! !"#!!!!!!!!!!!!!Pth! 63,1162! %!!!!!!!!!!RPMmax! 7,59E+03! !"#!!!!!!!!!!!!Wmax! 7,24E+04! !"#/!!!!!!!!!!!!!Pmax! 129,0208! !!!!!!!!!!!!!Jmax! 9,8651! !"!!!!!!!!!!!!Imax! 10,3521! !!!!!!!!!!!!!Fmax! 1,34E+03! !!!!!!!!!!Dbatmax! 9,853! !"#!!!!!!!!!!!!Ieff! 4,9871! !!!!!!!!!!!!!Jeff! 0,0741! !"!!!!!!!!!Vbateff! 13,7514! !!!!!!!!!!!RPMeff! 6,31E+03! !"#!!!!!!!!!!!!Weff! 660,3055! !"#/!!!!!!!!!!!!!Peff! 71,3155! !!!!!!!!!!!Ptheff! 79,0571! %!!!!!!!!!Dbateff! 20,4528! !"#!!!!!!!!!!!!Feff! 902,4674! !!!!!!Preciototal! 221,76! €!!!!!!VIABILIDAD! 1! !!
TABLA!!3!]!RESULTADOS!DE!MÁXIMA!EFICIENCIA!EN!VUELO!

! 27!
!
!
En!cuanto!a!las!baterías,!el!resultado!es!unánime,!utilizando!las!NCR18650B,!pues!aunque!no!son! baterías! especificas! del! mundo! del! radiocontrol,! el! coeficiente! de! capacidad! entre! peso! es!superior! a! cualquier!batería!utilizada!en!aeromodelismo.!En! cuanto!a! la!hélice,!un!diámetro!de!10!pulgadas!y!un!paso!de!4.7!pulgadas!es!lo!mas!óptimo!para!el!peso!de!nuestro!aparato.!
Sin!embargo,!la!importancia!del!algoritmo!no!reside!tanto!en!estos!últimos!resultados!si!no!en! tener! la! capacidad! de! obtener! una! combinación! eficiente! para! cualquier! tipo! de! aparato!independientemente!de!su!peso!o!número!de!rotores.!Se!utilizara!el! tamaño!obtenido!de! la!hélice!para!dimensionar! los!brazos!del! aparato.!Recuérdese!que!antes!de!ejecutar! el! algoritmo!debemos!tener!una!idea!aproximada!del!diseño!y!peso!del!aparato.!!

! 28!
! !

! 29!
!
CAPITULO!5.]!DISEÑO!DE!LA!ESTRUCTURA.!!!
5.1!CONSIDERACIONES!PREVIAS!
La!realización!del!diseño!se!basará!en!los!conocimientos!adquiridos!tras!diseñar!en!verano!de!2013!otro!multicóptero!(Figura!14).!En!ese!caso,!la!estructura!fue!realizada!en!aluminio.!El!diseño!se!basó!en!el!diseño!del!cuadricóptero!de!3drobotics!quadC,!sin!embargo,!fue!realizado!enteramente!en!aluminio!y!con!modificaciones!que!se!estimaron!oportunas!para!la!colocación!de!componentes.!!
!
FIGURA!14!–!IZQ.:!3DR!QUAD!C.!DCHA.:!CAD!DEL!PROTOTIPO!
Tras!varias!pruebas!de!vuelo,!y!sufrir!varios!accidentes,!tanto!por!la!configuración!del!aparato!como!por!la!poca!pericia!del!piloto,!se!comprueba!que!la!mayor!parte!de!los!impactos!se!concentran!en! los! brazos.! Sin! embargo,! al! ser! muy! superior! la! sección! y! el! espesor! del! material! en! estos!comparado!al!chasis,!al!sufrir!el!impacto,!se!produce!una!deformación!en!los!taladros!que!soportan!el!brazo.! Debido! al! proceso! de! corte! laser! que! conlleva! la! estructura! central,! cualquier! daño! sufrido!supone!un!alto!coste!de!sustitución.!Además,!en!el!diseño,!los!brazos!forman!una!parte!integral!del!chasis,! por! ello,! para! realizar! la! sustitución! de! algún! componente! se! requiere! retirar! numerosos!tornillos!y!pasadores,!haciendo!los!tiempos!de!reparación!largos!y!tediosos.!
Otro!problema!observado! fue!que!debido!a! la! rigidez!de!diseño,! las! vibraciones!generadas!por! las! piezas!móviles! se! transmiten!de! forma!muy!efectiva! al! controlador!de! vuelo.!Esto!provoca!falsas!medidas! y! ruido!en! los! sensores!de! vuelo! tales! como! los! giróscopos! y! acelerómetros.! ! En!el!prototipo,!fue!solucionado!colocando!espumas!y!juntas!tóricas!!sosteniendo!el!controlador!de!vuelo.!Esta!no!es!una!solución!óptima!pues!la!placa!de!electrónica!no!cuenta!con!la!suficiente!masa!como!para! eliminar! las! vibraciones! de! una! forma! efectiva.! Sin! embargo,! los! niveles! de! ruido! mecánico!observado!disminuyeron!a!niveles! aceptables!para!el! vuelo.! Las! vibraciones! también! causaron!que!varias!tuercas!necesitaran!ser!repuestas!por!tuercas!autoblocantes,!y!para!ello,!varios!elementos!de!la!tornillería!tuvieron!que!ser!alargados!para!acomodar!estas!tuercas.!!

! 30!
!
5.2!OBJETIVOS!
El!diseño!de!la!estructura!tiene!los!siguientes!objetivos!ordenados!por!importancia:!!
1. Coste!2. Eficiencia!3. Peso!4. Minimización!tiempos!reparación!5. Facilidad!de!transporte!.!
Existen!multitud! de! estructuras! disponibles! en! el!mercado! para! todo! tipo! de!multirotores (Flynn 2013).!Desde!estructuras!simples!para!aficionados,!hasta!estructuras!!hechas!a!mano!en!fibra!de! carbono! para! usos! profesionales.! Debido! a! la! bajada! de! precio! de! las! tecnologías,! se! está!poblando!el!mercado!de!modelos!comerciales!con!estructuras!“monocock”!en!inyección!de!plástico,!reduciendo!así!los!costes!de!fabricación.!Sin!embargo,!está!mas!que!probado,!que!ante!un!pequeño!accidente!o!incluso!aterrizajes!precipitados,!los!brazos!que!soportan!las!hélices!son!los!primeros!en!resultar!dañados.!Ya!que!la!fabricación!se!lleva!a!cabo!en!países!asiáticos!donde!la!mano!de!obra!es!mas!barata,! los! recambios! tardan!excesivo! tiempo!y!dinero!en! llegar.! Por! tanto,! como!decisión!de!diseño,! ya! que! es! complicado! evitar! la! rotura! de! los! brazos,! se! decide! que! sean! fácilmente!reemplazables!y!de!bajo!costo,!minimizando!el!tiempo!entre!reparaciones!y!por!ende!maximizando!el!tiempo!operativo.!!!
Ya!que!los!motores!han!de!fijarse!en!los!extremos!de!los!brazos,!en!caso!de!que!tengan!que!ser! sustituidos,! es! razonable! que! estén!montados! en! un! soporte,! evitando! así! la!modificación! del!brazo,!y!logrando!la!simplicidad!mecánica!del!mismo.!!
Como!con!cualquier!aparato!que!deba!surcar!los!aires,!es!de!crucial!importancia!contar!con!la!mayor!rigidez!posible!a!la!par!que!se!minimice!el!peso.!!Para!ello,!se!intentarán!aligerar!las!piezas!utilizadas.!Se!procederán!a!realizar!vaciados!donde!sea!necesario!pero!sin!comprometer!la!estructura!del! aparato.! La! tornillería! de! ser! posible,! se! llevará! a! cabo! en! nylon! para! continuar! aligerando! y!creando!posibles!puntos!débiles!de!alta!reparabilidad!.!
El!diseño!tradicional!de!este!tipo!de!aparatos!ha!colocado!siempre!las!hélices!por!encima!de!los!motores,!y!en!consecuencia!por!encima!de!los!brazos.!Esto!hace!que!el!flujo!de!aire!movido!por!la!hélice,! golpee! contra! el! brazo,! reduciendo!el! empuje.! La! solución!es! compleja!pues! es! complicado!soportar! la! estructura! sin! interferir! en! el! flujo! de! aire,! sin! embargo,! esto! puede! ser! minimizado,!colocando!la!hélice!empujando!debajo!del!brazo,!pues!el! flujo!de!aire!a! la!entrada!es!mas!disperso!que!a!la!salida(Figura!15),!como!se!demostrará!mas!adelante!en!el!apartado!5.6.!

! 31!
!
FIGURA!15!]!ESQUEMA!FLUJO!DE!AIRE!MOVIDO!POR!UNA!HÉLICE!
Como!se!ha!visto!al!analizar!los!resultados,!las!hélices!son!de!los!componentes!mas!baratos!de! por! si.! Esto! presenta! multitud! de! ventajas,! disponibilidad! de! recambios,! ligereza,! etc…! Sin!embargo,! el! precio! a! pagar! son! pequeños! defectos! en! la! inyección! de! plásticos,! imperceptibles! a!primera!vista,!pero!que!sin!embargo,!al!girar!a!una!alta!velocidad!angular,!hacen!que!la!hélice!genere!vibraciones! en! el! eje! motor! y! se! transmitan! a! través! del! brazo! y! a! la! estructura.! Esto! supone!introducir! ruido! de! medida! a! los! sensores! de! vuelo,! dificultando! en! gran! medida! el! control! del!aparato.!Como!no!se!espera!que!el!usuario!final!sea!capaz,!o!tenga!las!herramientas!para!equilibrar!una! hélice,! el! diseño! intentara! aislar! todas! las! causas! de! vibración! en! los! lugares! donde! deban!colocarse!los!sensores.!!
Ya! que! la! electrónica! del! aparato! y! mas! concretamente! el! magnetómetro! puede! verse!afectado!por! los!campos!magnéticos!generados,!deberemos!prever!dos!áreas,!una!de!ellas,! lo!mas!alejada! posible! de! todo! tipo! de! interferencias! electromagnéticas! para! poder! tener! lecturas! de!guiñada!precisas!y!!además,!deberemos!asegurar!la!integridad!de!los!componentes!ante!una!colisión!
Por!tanto,!los!requisitos!de!diseño!de!diseño!son!los!siguientes:!
• Bajo!coste!• Alta!accesibilidad!a!materiales!• Alta!reparabilidad!sin!necesidad!de!herramientas!complejas!• Maximización!de!eficiencia!• Ligereza!• Maximización!de!elementos!comunes!
! En! cuanto! a! la! elección! de! los! materiales,! los! separaremos! en! dos! categorías.! Los! que!consideramos!elementos!susceptibles!a!ser!reemplazados!y!los!que!no.!Entre!los!que!son!susceptible!a! ser! reparados,! se! encuentran! elementos! fácilmente! dañables! ante! una! colisión.! Entre! ellos! se!consideran,!los!soportes!motor,!los!brazos!y!el!tren!de!aterrizaje.!Generalmente,!por!experiencia!en!

! 32!
el!prototipo,!sabemos!que!son!los!elementos!que!mas!sufren.!Por!ello,!se!utilizaran!piezas!fácilmente!mecanizables!o!realizadas!en!chapa.!Para!mantener!el!peso!contenido!utilizaremos!madera!para!los!brazos! y! aluminio! para! el! resto! de! piezas! mencionadas,! siempre! teniendo! en! cuenta! una! alta!accesibilidad!a!su!adquisición.!!
! El!resto!de!materiales!se!escogerán!siguiendo!la!misma!filosofía!de! ligereza,!pero!se!optará!por!materiales!menos!accesibles,!tales!como!composites!o!plásticos.!
!
5.3!JUSTIFICACIONES!DE!MATERIALES!!
BRAZO!!
Como!se!ha!descrito!anteriormente,!el!brazo!ha!de!ser!un!elemento!fácilmente!reparable!y!sustituible.! Por! ello,! utilizaremos! listones! de! madera! estándar.! Sin! embargo,! la! madera! no! es! un!material!fácil!con!el!que!dimensionar.!No!sólo!las!propiedades!mecánicas!de!las!maderas!varían!entre!las!distintas! familias!de!árboles,! sino!que! la!dirección!de! las! fibras! también!altera! sus!propiedades!mecánicas,!al! igual!que! la! !humedad.!Por!ello,!se!priorizaran!por!densidad!y!por! tensión!de!rotura,!pues!se!sabe!que!el!brazo!trabajará!como!si!de!una!viga!empotrada!con!una!carga!en!un!extremo!se!tratara.!Para!ello,!utilizaremos!el!software!CES!EDUPACK,!donde!ordenaremos!los!tipos!de!madera!en!una!gráfica!de!densidad!contra!límite!elástico.!
!
FIGURA!16!–!GRAFICA!ELECCIÓN!MADERAS,!DENSIDAD!VS!LÍMITE!ELÁSTICO!
Como! se! puede! comprobar! en! la! figura! 16,! donde! se! relaciona! la! densidad! con! el! límite!elástico,!la!elección!lógica!de!tipos!de!madera!son!el!Sauce!(Willow),!el!Cedro!(Cedar)y!el!Pino!(Pine).!Todas! ellas! proporcionan! un! bajo! peso,! con! una! limite! elástico!mas! que! aceptable! para! nuestros!diseños.! Como! se! aprecia,! utilizando! la! veta! de! la! madera! a! favor(zona! sombreada! en! verde),! la!relación! es! lineal,! por! ello,! la! figura! 16! puede! ser! acotada! estableciendo! un! valor! máximo! de!

! 33!
densidad! (600 !"!!)! y! un! valor!minimo! de! límite! elástico! (25!"#),! quedando! asi! seleccionadas! las!
maderas! mencionadas! anteriormente.! Sin! embargo,! lo! mas! común! de! encontrar! en! las! tiendas!nacionales! de! bricolaje! es! madera! de! abeto! (Fir),! y! ! por! tanto,! será! el! material! a! utilizar! en! el!prototipo,! sin! embargo,! el! objetivo! es! que! cualquier! ! listón! de! madera! de! los! mencionados!anteriormente!de! las!dimensiones! indicadas!pueda!ser!utilizado.!Para! todos! los!casos! se!procurara!utilizar!la!veta!de!la!madera!a!favor,!mejorando!así!las!propiedades!mecánicas.!
Propiedades!Mecánicas!de!la!madera!de!Abeto!!(Abies!Grandis)!
Densidad! 370!–!460! !"!!!
Módulo!de!Young! 10.7!–!13.1! !"#!Modulo!de!Poisson! 0.35]0.4! !
Limite!elástico! 32.9]40.2! !"#!Tensión!axial!máxima! 51.4]62.7! !"#!
TABLA!!4!–!PROPIEDADES!MECÁNICAS!DE!LA!MADERA!DE!ABETO!
CHASIS!
Para!el!chasis,!se!busca!una!extrema!ligereza!a!la!par!que!una!alta!resistencia!mecánica,!pues!al!ser!aligerado,!se!aumentaran!los!esfuerzos!que!deberán!soportar!las!placas.!Por!ello,!se!consideran!el!uso!de!materiales!del!tipo!composite.!Entre!ellos!se!considera!la!fibra!de!carbono.!Sin!embargo,!la!conductividad! que! proporcionan! las! fibras! de! carbono,! unido! a! su! alto! precio,! y! considerando! su!difícil!mecanización,!descartan!esta!opción!rápidamente.!!
!
FIGURA!17!–!GRAFICA!ELECCIÓN!DE!COMPOSITES,!DENSIDAD!VS!LÍMITE!ELÁSTICO!

! 34!
Entonces,!se!recurre!pues!al!siguiente!candidato!en!el!campo!de!los!composites,! la!fibra!de!vidrio.!Al! contrario!que! la! fibra!de! carbono,! no!es! un!material! conductivo!de!por! si,! por! tanto,! no!producirá! alteraciones! en! los! aparatos! de! vuelo.! Sin! embargo,! se! presta! a! utilizarse! como! PCB,!llevando!conexiones!a!distintos!elementos!del!aparato,!ahorrando!así!peso!de!cableado.!La!fibra!de!vidrio! es! conocida! por! ser! un!material! resistente! y! rígido,! a! la! par! de! ser! un! buen! aislante! tanto!térmico!como!eléctrico.!!
Como!con!todos!los!materiales!composites!fabricados!de!forma!artesanal,!se!encuentra!con!un!amplio!rango!de!propiedades!mecánicas,!ello!es!debido!tanto!a!la!disposición!de!las!fibras!como!a!su!calidad.!
Phenolic/E]glass!fiber,!woven!fabric!composite,!biaxial!�lamina!
Densidad! 1850! !"!!!
Módulo!de!Young! 27.2!–!39.4! !"#!Modulo!de!Poisson! 0.07]0.11! !
Limite!elástico! 217]520! !"#!Tensión!axial!máxima! 217]520! !"#!
TABLA!!5!]PROPIEDADES!DE!LA!FIBRA!DE!VIDRIO!UTILIZADA!
!
SOPORTES!MOTOR!
Como! se! verá! mas! adelante,! los! soportes! motor! deberán! ser! una! pieza! fácilmente!reemplazable!y!de!bajo!costo.!Sin!embargo,!no!debemos!olvidar! las!principales!premisas!de!diseño!establecidas!hasta!ahora,!bajo!coste!,! ligereza!y!reparabilidad.!Por!ello,!al!tratarse!de!una!pieza!con!una!relativa!complicación!mecánica,!será!llevada!a!cabo!en!una!aleación!de!aluminio.!!
El!tratamiento!!térmico!que!deberá!llevar!el!aluminio,!deberá!permitir!deformación!plástica!para! poder! ser! plegado! en! la! pieza! que! deseamos.! Ello! proporcionará! además! un! cierto!amortiguamiento!en!caso!de!impacto!(Al!igual!que!las!zonas!de!plegado!en!un!vehículo),!que!podrá!ser!devuelto!a!su!forma!original!un!número!limitado!de!veces!antes!de!que!tenga!que!ser!sustituido.!Un! aluminio! muy! común! utilizado! en! la! industria! aeronáutica! debido! a! sus! altas! prestaciones! y!ligereza!es!el!6061.!Gracias!a!ello!es!una!aleación!de!aluminio!muy!común!y!fácil!de!obtener.!Además,!para! lograr!el!plegado!y!conseguir!ductilidad! la!aleación!habrá!de!haber!sufrido!un! tratamiento!de!recocido,!de!esta!forma!se! logran!radios!de!plegado! inferiores!al!50%!del!espesor!del!material.!Por!tanto!la!aleación!a!utilizar!tiene!la!denominación!6061]0!.!!
Propiedades!Mecánicas!del!Aluminio!6061]O!!
Densidad! 2700! !"!!!
Módulo!de!Young! 68.9! !"#!Modulo!de!Poisson! 0.33! !
Limite!elástico! 55,2! !"#!Tensión!axial!máxima! 124! !"#!TABLA!!6!]!PROPIEDADES!DEL!ALUMINIO!SELECCIONADO!

! 35!
5.4!JUSTIFICACIONES!DE!DISEÑO!
!
CHASIS!
En!el!diseño!de!éste!tipo!de!aparatos,!para!mejorar!la!eficiencia!y!evitar!que!ciertos!motores!trabajen!más!que!otros,!es!necesario!asegurar!que!el!centro!de!empuje!esté!en!la!misma!vertical!que!el!centro!de!gravedad.!Ello!se!consigue!creando!simetrías!en!las!piezas.!Habrá!que!disponer!espacios!para! la! colocación! de! la! batería,! carga! y! electrónica,! además! de! otros! sensores! que! puedan! verse!afectados!por!las!radiofrecuencias!que!se!utilizan!para!la!comunicación!con!el!aparato.!!!
El!principal!componente!al!que!se!une!el!chasis,!es!la!“Placa!sucia”.!Debido!a!que!el!chasis!ha!de!ser!unido!a!través!de!soportes!antivibración!(Silent!Blocks),!no!puede!suspenderse!de! las!placas!anteriormente!mencionadas,!ya!que!este!tipo!de!componentes!han!de!funcionar!a!compresión,!por!ello,! se! idea! una! placa! que! habrá! de! colocarse! en! la! parte! superior! de! los! brazos! y! en! la! que! se!apoyará! los! silent]blocs! y!de!ella! se! suspenderá!el! resto!de! la! estructura,! que!al! no! ir! rígidamente!unida!a!los!motores,!no!se!verá!influenciada!por!las!vibraciones.!!
Una! vez! diseñada! la! pieza! superior! como! un! octágono! irregular,! se! le! añaden! los! taladros! que!conectará!tanto!la!parte!inferior!del!chasis!como!a!la!placa!sucia.!!Además,!se!le!añaden!dos!ranuras!del!tamaño!necesario!para!poder!retirar!los!brazos!sin!tener!que!desmontar!el!aparato.!!
Partiendo!de!la!pieza!superior,!se!imita!la!pieza!inferior,!sin!embargo,!esto!no!proporciona!el!espacio! requerido! para! portar! todos! los! componentes! necesarios,! para! ello,! se! añaden!dos! bahías!simétricas! en! la!parte!delantera! y! trasera!del! aparato,! proporcionando!así! el! espacio!necesario.!Al!igual! que! con! la! parte! superior,! se! hacen! los! taladros! necesarios! y! se! instalan! las! ranuras! para! la!retirada!de!los!pasadores!que!sostienen!los!brazos!en!posición.!!
!
FIGURA!18!–!CHASIS!!
!

! 36!
!
PLACA!SUCIA!
La! única! causa! de! ruido! mecánico! en! los! multicópteros! proviene! de! la! rotación! a! altas!revoluciones! de! los! motores.! Imperfecciones! en! los! componentes! tales! como! la! hélice! o! el! rotor!pueden!llegar!a!causar!lecturas!incorrectas!en!la!IMU!(Inertial!measurement!unit)!y!un!vuelo!errático,!además!de!causar! imperfecciones!en!el! video!si! se!decide!equipar!al!aparato!con!una!cámara.!Por!ello,!se!decide!montar!todos!los!brazos!y!sus!respectivos!motores!a!una!misma!placa!conocida!como!“placa! sucia”,! y! posteriormente! anclar! esta! placa! al! resto! del! chasis! a! través! de! elementos!antivibratorios,!aislando!así!toda!la!electrónica!del!ruido!mecánico.!
Esta! pieza! deberá! actuar! de! intermediario! entre! los! brazos! y! el! chasis,! transmitiendo! la!fuerza! y! deformándose! lo! menos! posible.! Para! ello,! se! crean! dos! piezas,! ambas! realizadas! en! el!mismo!material!que!el! resto!del!chasis!para!aliviar!el!peso.! ! Las!placas!estarán!separadas!por!unos!separadores!similares!a!los!usados!en!la!electrónica!de!tal!forma!que!al!retirar!todos!los!brazos,!las!placas!queden!soportadas.!Mecánicamente!también!se!justifica,!pues!al!tirar!los!brazos!hacia!arriba,!la!parte!inferior!de!la!placa!se!encuentra!a!tracción.!Carecer!de!esta!placa!supondría!sobrecargar!la!placa!superior.!!
!
FIGURA!19!–!PLACAS!SUCIAS!MONTADAS!
Por!razones!en!el!conexionado!de!la!electrónica,!se!realizan!vaciados!en!la!pieza!para!que!se!puedan! pasar! cables! por! el! interior! del! aparato,! además! de! para! lograr! un! diseño! con! un! peso!reducido.!
SOPORTES!MOTOR!
Los! soportes!motor! tienen! como!misión! conectar! el! brazo! con!el!motor.! Como! se!ha! visto!anteriormente,!serán!realizados!en!chapa!de!aluminio!y!deberán!ser!del!mismo!grosor!que!la!placa!“sucia”! para! poder! aprovechar! los! pasadores.! Por! tanto,! asumiremos! un! espesor! de! 1mm! ! y!diseñaremos!la!pieza.! !La!única!condición!de!diseño!es!que!sea!capaz!de!cumplir!su!cometido!y!sea!ligera.!Por!tanto,!se!diseña!la!pieza!para!que!una!vez!doblada,!el!perno!la!atraviese!por!dos!laterales!!

! 37!
y!los!motores!vayan!anclados!de!una!forma!permanente.!!Para!aligerar!la!pieza,!se!intenta!retirar!el!mayor!material!posible!sin!complicar!excesivamente!la!pieza.!!
!
FIGURA!20!–!SOPORTE!MOTOR!
Para!comprobar!el!diseño!escogido!se!realiza!una!simulación!ante! la!carga!máxima,!al! igual!que!la!realizada!en!el!brazo.!Se!simula!la!carga!en!la!pieza!por!si!sola!y!más!adelante,!se!ensayará!en!conjunto!con!el!brazo.!
!
FIGURA!21!–!SIMULACIÓN!DE!CARGA!SOBRE!EL!SOPORTE!MOTOR!

! 38!
!
FIGURA!22!–!SIMULACION!DE!DEFORMACIÓN!SOBRE!EL!SOPORTE!MOTOR!
Para!comprobar!que!la!pieza!tiene!la!resistencia!mecánica!adecuada!para!la!tarea,!se!fijan!al!espacio! los!puntos!de!anclaje,!y!se!aplica!una!carga!de!20N!en! las!proximidades!de! los! taladros!de!montaje! de! los!motores,! una! carga!muy! superior! a! lo! calculado! para! cada!motor! en! el! algoritmo.!Como! se!muestra!en! la! figura!22,! (nótese!el! exagerado!de! los!desplazamientos),! en!el! peor!de! los!casos,!se!desplaza!apenas!15!decimas!de!mm!!y!una!tensión!máxima!de!alrededor!de!los!15Mpa,!muy!alejado!de!la!tensión!limite!del!aluminio!utilizado.!
Cabe!destacar,!que!aunque!pueda!parecer!que!la!pieza!esta!sobredimensionada,!y!por!tanto!que!podría!aligerarse,!llevar!a!cabo!un!diseño!mas!ligero!implicaría!una!complicación!de!diseño!muy!superior,!además!de!resultar!mucho!mas!difícil!de!reparar!en!caso!de!llegar!a!ser!dañada.!
Además!de!realizar!simulaciones!estáticas,!ya!que!el!software!elegido!lo!permite,!se!llevan!a!cabo!!simulaciones!de!caída!libre!donde!observamos!que,!al!ser!aluminio!recocido!para!su!plegado,!al!impactar!solo!sufre!ciertas!deformaciones!que!pueden!ser!corregidas!a!un!nivel!aceptable!con!el!uso!de!herramientas!muy!básicas!o!incluso!manualmente.!!
!
BRAZO!
Los!brazos!son! la!seña!característica!de! los!multicópteros,!sin!embargo,!por!experiencia,!se!sabe! que! son! también! su! punto!mas! débil.! Por! ello,! como! se! ha! comentado! anteriormente,! serán!realizados!en!madera.!!
Los!motores!que!estamos!tratando,!están!diseñados!para!ser!apoyados!sobre!una!superficie!plana,!!aunque!es!cierto,!que!en!nuestro!diseño!no!serán!fijados!directamente!a!los!brazos,!el!crear!una!pieza! que! se! acople! perfectamente! a! un!brazo! circular! supone!una! complicación! a! la! hora! de!fabricar! y! de! asegurar! su! correcto! montaje.! Por! ello,! se! ha! decidido! la! utilización! de! un! listón!cuadrado.!!

! 39!
La! longitud,! vendrá! dada! por! el! tamaño! de! las! hélices,! como! hemos! visto! anteriormente,!para!el!diseño!se!requieren!hélices!de!un!gran!diámetro,!por!tanto,!la!longitud!del!brazo,!deberá!ser!lo! suficientemente! larga!como!para!que! la!hélice!salve! la!estructura!y!para!que!su! flujo!de!aire!no!interfiera!ni!con!la!estructura!ni!con!la!carga.!Así,!conociendo!la!fuerza!que!es!capaz!de!ejercer!cada!motor! y! el! material! del! que! está! realizado! cada! brazo,! somos! capaces! de! determinar! la! sección!necesaria.!Como!parámetros!adicionales!de!diseño,!!se!acuerda!limitar!la!flecha!en!el!extremo!a!5mm!y!el!ángulo!a!10º!pues!de!no!ser!así,!el!modelado!y!el!control!del!aparato!se!complicaría!en!exceso!o!no!llegaría!a!funcionar!ya!que!los!motores!pierden!su!perpendicularidad!respecto!a! los!sistemas!de!orientación,!convirtiendo!el!sistema!en!no!lineal.!!
Analizaremos!primero!el!brazo!como!si!de!una!viga!simple!se!tratase,!con!un!empotramiento!en!un! lateral,!y!con!una!fuerza!puntual!aplicada!en!el!otro!extremo.!La! fuerza!aplicada!tiene!como!valor!máximo!la!obtenida!en!el!algoritmo.!
La!deformación!angular!en!el!extremo!viene!dada!por:!
! !! = ! ! · !!2 · !! · !!!
(37)!
!
Mientras!que!la!flecha!viene!dada!por!:!
! ! = ! · ! · !!3 · !! · !!!
(38)!
!
Como! es! conocido! que! el! punto! mas! desfavorable! será! el! empotramiento,! el! momento!flector!viene!dado!simplemente!por:!
! ! = ! · !! (39)!!
y!por!tanto!la!tensión!máxima!viene!dado!por:!
!!!"# =
! · !2! !
(40)!
Donde!A!representa!al!ancho!del!brazo!
Ya! que! la! intención! es! que! el! material! en! bruto! de! los! brazos! sea! fácilmente! accesible,!accedemos! a! suministradores! de! carpintería,! de! donde! observamos,! que! las!medidas! típicas! para!listones!cuadrados,!comienzan!en!5mm!!de!lado!,!llegando!hasta!valores!muy!por!encima!de!lo!que!esperamos!que!sea!necesario!antes!de!tener!que!elegir!otro!material.!Los!incrementos!típicos!son!de!5mm!en!5mm.!!

! 40!
!
TABLA!!7!]!ITERACIÓN!PARA!LA!ELECCIÓN!DEL!ESPESOR!DEL!BRAZO!
Por!tanto,!para!determinar!la!sección!que!habrá!de!tener!el!brazo,!utilizaremos!una!hoja!de!cálculo! para! poder! iterar! rápidamente! los! valores! (Tabla! 7).! Con! las! ecuaciones!36, 37,38!!!39!! se!procede!a! calcular! la! flecha!en!el!extremo,! la! tensión!máxima!del!brazo!y!el! ángulo!en!el!extremo!para!el!calculo!de! los!valores!con! incrementos!de!1mm!en!el!brazo.!Tras! recorrer! las!medidas!más!comunes,!la!medida!resultante!es!20mm!
Sin! embargo,! ya!que!para! realizar! un!diseño!preciso,! el! proyecto! se! apoya!en!un! software!CAD,! no! está! de!mas! llevar! a! cabo! una! simulación! para! comprobar! los! resultados! que! se! verán! a!continuación.!
!

! 41!
!
FIGURA!23!–!SIMULACIÓN!FLEXIÓN!BRAZO,!MADERA!ABETO!
Como!se!puede!ver!en!la!simulación!(Figura!23)!la!tensión!máxima!que!habrá!de!soportar!el!brazo!es!de! !8.5!"#!algo!superior!a! lo!calculado!en! la!Tabla!7!pues!en! los!taladros,!se!produce!un!efecto!concentrador!de!tensiones!.!Nótese!que!en!el!cálculo!analítico!realizado!anteriormente,!no!se!tienen!en!cuenta!,ni!los!taladros!realizados,!ni!el!espacio!tomado!por!los!pasadores,!lo!que!reduce!la!longitud!del!brazo!y!por!tanto!el!momento!flector,!es!por!ello!que!la!simulación!resulta!crucial!para!el!dimensionado!del!brazo,!pues!proporciona!resultados!de!gran!precisión.!
El! anclaje! del! brazo! al! cuerpo! y! a! los! soportes! motor! se! llevarán! a! cabo! mediante! dos!pasadores!respectivamente.!Lo!que!se!busca!con!esta!solución,!es!aprovechar!el!mayor!número!de!componentes,! reduciendo! así! el! precio! de! fabricación.! De! la! misma! manera,! al! utilizar! el! mismo!perno,!el!diámetro!deberá!ser!el!mismo.!Aprovechando!el!hecho!de!que!todos!los!taladros!habrán!de!ser! iguales,! se! colocaran! a! la!misma! distancia! entre! si,! y! a! la!misma! distancia! del! extremo! en! sus!respectivas! caras,! de! ésta! forma! el! brazo! no! tiene! una! posición! definida! y! podrá! ser! colocado! de!cualquier!forma!garantizando!un!montaje!correcto.!
PASADORES!
Para!la!sujeción!entre!brazos,!soporte!motor!y!chasis,!se!utilizaran!pasadores.!Para!facilitar!el!desmontaje!y!evitar!que!puedan!soltarse!debido!a!las!vibraciones,!llevarán!un!taladro!en!el!extremo!para! insertar! un! clip! de! seguridad! del! tipo! “R”.! De! esta! forma,! la! sustitución! de! los! brazos! puede!llevarse!a!cabo!en!apenas!unos!segundos!,!sin!que!esta!fijación!pueda!comprometer!la!integridad!del!aparato!en!vuelo.!A!pesar!de!requerirse!el!empleo!de!metales! ligeros! tales!como!el!aluminio,!para!evitar! la! fabricación! de! los! componentes! se! recurrirá! a! pasadores! estandarizados! fácilmente!disponibles!en!suministradores!.!

! 42!
!
FIGURA!24!–!R]CLIP!
!
FIGURA!25!–!PERNO!DE!SUJECCIÓN!
!
MONTAJE!DE!COMPONENTES!
Aunque!el!aparato!ha!sido!diseñado!para!no!sufrir!daños!ante!una!colisión,!mas!allá!de! los!previstos,!es!posible!que!deba!sufrir!reparaciones.!Por!ello,!el!montaje!entre!las!placas!deberá!poder!ser!llevado!a!cabo!por!alguien!sin!demasiada!habilidad!y!sin!disponer!de!herramientas,!mas!allá!de!un!destornillador!y!unos!alicates.!!
Por!ello,!las!tres!placas!que!conforman!el!chasis,!están!unidas!por!unos!separadores!estándar!de!40mm!de!longitud!de!nylon,!similares!a!los!utilizados!en!electrónica!para!la!sujeción!de!circuitos!impresos.!De!esta!forma,!podemos!reducir!el!número!de!componentes!distintos!y!no!ser!necesarias!tuercas! para! su! montaje.! Además,! en! caso! de! que! los! brazos! no! frenen! el! impacto! en! caso! de!colision,!los!pasadores!de!nylon!serán!lo!próximo!en!romper,!resultando!asi!un!componente!de!alta!accesibilidad!y!bajo!precio!!!
Toda!la!tornillería!es!realizada!en!métrica!3!ya!que!es!una!medida!común!en!electrónica,!otra!vez!así!simplificando!el!diseño!y!unificando!componentes.!!
!
FIGURA!26!]!SEPARADORES!DE!NYLON!

! 43!
5.5!ANÁLISIS!DE!LOS!ELEMENTOS!
Al!igual!que!en!una!embarcación!es!necesario!analizar!las!posiciones!del!centro!de!flotación!y!de! gravedad,! para! lograr! un! correcto! funcionamiento! del! multicóptero,! se! debe! analizar! de! una!forma!precisa!tanto!el!centro!de!empuje!como!el!centro!de!gravedad.!!
!
FIGURA!27!–!QUADRICÓPTERO!EN!POSICION!DE!AVANCE!DE!30º!
Asumimos!una!posición!de!vuelo!horizontal!manteniendo! la!altitud.! La! fuerza!que!deberán!hacer!los!motores!(Consideramos!ambos!motores!delanteros!como!una!única!fuerza!e!ídem!con!los!traseros)! viene! determinada! por! un! sistema! de! ecuaciones! (41)! formado! por! la! suma! vertical! de!fuerzas!y!!de!momentos!respecto!al!centro!de!empuje!
!
! !"#$!"# + !"#$!"#$ · !"#! ! = ! · !!!!"#$!"#$ · !2 − !"#$!"# · !2 cos ! = !!! · ! · !!1!
(41)!
!
A!priori,!podría!parecer!que!la!distancia!D1!simplemente!indica!la!diferencia!de!fuerzas!que!han! de! ejercer! los! motores,! sin! embargo,! como! ya! se! ha! visto! en! las! ecuaciones! de! la! fuerza! de!empuje! de! la! hélice,! ! este! tiene! una! relación! cuadrática! con! la! velocidad,! y! por! tanto,! no! solo! se!produce! un! mayor! consumo! eléctrico! al! tener! que! acelerar! la! hélice! para! alcanzar! la! posición!deseada,! sino! que! al! mantener! la! posición! de! vuelo! horizontal,! se! producirá! un! mayor! consumo!eléctrico,!degradando!así!la!autonomía!del!cuadricóptero.!
Ya! que! conocemos! las! propiedades! mecánicas! del! diseño! y! a! priori! son! razonables,!dependeremos!de!la!colocación!de!demás!componentes!como!pueden!ser!la!carga,!los!sensores!y!las!baterías!para!acercar!lo!máximo!el!centro!de!gravedad!al!de!empuje,!manteniéndolo!siempre!debajo!para!la!simplificación!del!control!del!aparato!y!consiguiendo!un!sistema!más!sencillo!de!estabilizar.!!

! 44!
CENTRO!DE!EMPUJE!Y!GRAVEDAD!
Para! obtener! éstos! parámetros! de! una! forma! precisa! resulta! necesario! obtener! todas! las!ubicaciones! de! los! componentes! con! gran! exactitud,! y! poder! así! calcular! posteriormente! con! su!masa,!el!efecto!sobre!el!centro!de!gravedad!del!aparato.!Esto!es!complicado!!pues!las!dimensiones!de! los!componentes!que!se!compran!no!son!precisas!y!por!ello! lo!máximo!que!podremos!hacer!es!una!estimación!con!una!precisión! limitada!del!peso!y!ubicación!de! los!componentes.!Sin!embargo,!será!suficiente!para!comprobar!la!estabilidad.!!
La!desventaja!de!la!colocación!de!los!motores!debajo!de!los!brazos!tiene!el!inconveniente!de!bajar!el!centro!de!empuje,!sin!embargo,!como!se!muestra!en!la!figura!29,!con!el!diseño!establecido!no! supone! un! mayor! problema,! pues! debido! al! peso! de! la! carga! y! elementos! como! la! batería,!podemos! comprobar! como! el! centro! de! gravedad! se!mantiene! por! debajo! del! centro! de! empuje,!logrando! así! la! una!mejor! estabilidad! en! el! sistema.! La! proximidad! de! estos! puntos! en! el! espacio,!supone!una!mayor!maniobrabilidad,!pues!se!logran!mayores!movimientos!con!menores!controles!de!entrada.! El! procedimiento! de! cálculo! para! el! centro! de! gravedad! ha! sido! realizado!mediante! una!ponderación!de! los!pesos!de! los!componentes!según!su!distancia!a!una!referencia,!en!este!caso!el!centro! de! gravedad! de! la! estructura.! Al! ser! simétrico,! únicamente! será! necesario! el! cálculo! de! la!posición!vertical.!
!
! ! = !!"#$%&#%$' · !! + 2 · !!!"#$%&" · !! + !!!"#$" · !!!!"#$%&#%$' + 2 · !!!"#$%&" + !!!"#$"
!(42)!
!
Las!masas!de!las!baterías!proceden!de!los!resultados!obtenidos!en!el!algoritmo!y!la!de!la!estructura,!proviene! del!modelo! CAD! y! las! distancias! tomadas! desde! el! centro! de! gravedad! de! la! estructura,!extremadamente! próximo! a! la! parte! inferior! de! los! brazos,! resultando!!! = 0, !! ≈ 40!!!!!!! ≈80!! !,! obteniendo!! ≈ 28!! !Nótese! lo! aproximado! de! los! valores,! pues! se! desconocen! con!precisión!al!depender!de!factores!que!no!vienen!indicados!en!las!hojas!de!datos!de!los!fabricantes.!!
! !
FIGURA!28!–!CENTROS!DE!MASAS!DE!LOS!COMPONENTES!
Para!el!centro!de!empuje,!será!suficiente!con!simplificar!la!fuerza!en!el!centro!del!eje!motor,!a!la!altura!del!buje!de!la!hélice.!Como!es!habitual,!los!fabricantes!de!motores!de!aeromodelismo,!no!

! 45!
proporcionan!cotas!específicas!sobre!sus!productos!sino!que!se! limitan!a!proporcionar! información!básica! tal! como! el! diámetro! del! eje! o! los! puntos! de! anclaje.! Los! motores! establecidos! por! el!algoritmo,!al!ser!de!bajos!KV!(pocas!revoluciones),!para!mantener!la!potencia,!son!motores!planos!!y!anchos,!generando!así!un!mayor!par.!Ésta!característica!sumada!a!la!colocación!inferior!de!las!hélices!en!los!brazos!hace!que!el!centro!de!empuje!pueda!aumentar!su!cota.!!
! !
FIGURA!29!–!RELACIÓN!ENTRE!CENTRO!DE!GRAVEDAD!Y!DE!EMPUJE!
!
!
Los!parámetros!obtenidos!exclusivamente!para!la!estructura!son!los!siguientes:!
Propiedad! Valor!! Unidades!Volumen!Total! 832399.99! !!!!Masa!total! 1055.69! !!Momentos!de!inercia!!obtenidos!en!el!centro!de!gravedad![! ·!!!]!Ixx!=!30426725.60! ! Ixy!=!0.00! Ixz!=!]0.04!Iyx!=!0.00! Iyy!=!56886116.89! Iyz!=!]0.00!Izx!=!]0.04! Izy!=!]0.00! ! Izz!=!27603085.84!
!
Estos! parámetros! se! obtienen! con! el! objetivo! de! ser! introducidos! posteriormente! en! el!control! que! vaya! a! gobernar! al! aparato.! Sin! embargo,! utilizando! las! ecuaciones! (1]5)! podemos!obtener!unas!referencias!básicas!de!las!características!de!vuelo!del!aparato.!!
RESISTENCIA!MECÁNICA!
Tras! haber! definido! los! objetivos! de! diseño! mecánico,! se! deberá! proceder! a! realizar! las!simulaciones! correspondientes! para! verificar! que! el! diseño! responde! a! las! especificaciones!requeridas.!Para!ello,!se!utiliza!el!paquete!de!diseño!en!CAD!(Solidworks)!para!simular!las!cargas.!Del!algoritmo! de! optimización,! también! podremos! obtener! los! parámetros! mas! desfavorables,! tales!como!la!fuerza!máxima!o!el!par!máximo!que!habrá!de!soportar!cada!brazo.!!Se!analizarán!todos!los!componentes! sujetos! a! esfuerzos! mecánicos! tanto! por! separado! como! en! conjunto.! Se! busca!garantizar! que! no! se! produce! ninguna! tensión! por! encima! de! la! rotura! que! podría! resultar!catastrófica!en!vuelo.!Asimismo,!se!busca!comprobar!que!las!posibles!deformaciones!que!se!puedan!

! 46!
producir! por! las! fuerzas! aerodinámicas! de! las! hélices! resulten! compatibles! con! un! vuelo! seguro! y!controlado.!!
Para!la!realización!de!la!simulaciones!se!utilizara!el!paquete!de!simulaciones!de!solidworks.!Las! características!mecánicas! de! los!materiales,! serán! las! indicadas! en! los! apartados! anteriores.! El!tamaño!del!mallado!deberá!ser!variable!en!cada!caso,!dependiendo!del! tipo!de!pieza!y!del!detalle!que!se!busque.!Siempre!que!se!pueda,!se!evitará!llevar!a!cabo!un!mallado!automático!y!se!intentará!que!resulten!en!números!de!fácil!interpretación.!!
Gracias!al!paquete!elegido,! se!permite! también!hacer! simulaciones!de!caída! libre.!En!estas!simulaciones!no!se!busca!que!la!estructura!sea!resistente!a!cualquier!tipo!de!impacto,!si!no!que!las!zonas!débiles!proyectadas!actúen!como!tal,!rompiéndose!de!una!forma!controlada!y!evitando!males!mayores!al!resto!de!la!estructura.!Debido!a!la!aleatoriedad!de!un!impacto!en!caída!libre,!y!el!tiempo!requerido!para!la!simulación,!que!simplemente!ensayaremos!ciertas!posiciones!arbitrarias!buscando!que! el! impacto! se! lleve! a! cabo! en! los! brazos! de! alguna! forma,! pues! son! el! único! punto! débil!proyectado.!
Gracias! al! diseño! en! CAD,! podemos! extraer! fácilmente! ! la! lista! de! los! componentes! que!forman! la! estructura,! ordenadas! por! peso,! así! como! un! modelo! visual! donde! cada! pieza! se!representa!de!un!color!según!su!peso.!
!
FIGURA!30!–!REPRESENTACIÓN!GRÁFICA!DEL!PESO!DE!LOS!COMPONENTES!
!
FIGURA!31!–!COMPONENTES!ORDENADOS!POR!PESO!

! 47!
Asimismo! se! utilizaran! las! simulaciones! para! comprobar! de! forma! visual! en! qué! puntos!pueden!aligerarse!la!estructura!sin!comprometer!la!resistencia!mecánica!el!aparato.!De!esta!forma,!el!proceso!se!convierte!en!un!proceso!iterativo!por!el!cual!procedemos!a!diseñar!la!pieza,!analizarla,!realizar! modificaciones,! volver! a! analizarla! y! así! sucesivamente.! Debido! al! tiempo! y! la! memoria!consumida!por!el!ordenador!al!realizar!las!simulaciones,!se!limitan!las!modificaciones,!ya!que!el!peso!ahorrado!con!cada!modificación!resulta!despreciable!y!sin!embargo!el!tiempo!invertido!aumenta!de!una!forma!exponencial.!!!
Como!ya!se!ha!determinado!la!resistencia!mecánica!de!los!brazos,!se!procederá!al!análisis!del!conjunto! para! determinar! la! resistencia! mecánica.! La! primera! simulación! se! lleva! a! cabo! a! la!estructura! interior.! Lo!primero!que!deberemos!determinar!es! si! las!placas! “sucias”! son!capaces!de!resistir!el!empuje!generado!a!máxima!potencia.!Para!ello,! cargamos! los! soportes!motores! con!una!fuerza! distribuida! equivalente! al! empuje! total! proporcionado!por! una! sola! hélice! al!máximo!de! su!correspondiente!motor,!mientras!que!se!fijan!las!placas!sucias!por!sus!!puntos!de!sujeción.!!!
!
FIGURA!32!–!ZONAS!MÁS!CARGADAS!A!MÁXIMA!POTENCIA!
Como! se! puede! ver! en! la! figura! 32! ,! los! puntos!más! cargados! del! ensayo! son! los! brazos,!mientras! que! las! placas! de! sujeción! apenas! aparecen! coloreadas! mas! allá! del! punto! donde! se!insertan!los!pasadores.!

! 48!
!
FIGURA!33!–!SIMULACIÓN!DE!CARGAS!SOBRE!LAS!PLACAS!SUCIAS!
!
5.6!ANALISIS!DEL!FLUJO!DE!LA!HÉLICE!
La! colocación! de! las! hélices! debajo! de! los! brazos,! hasta! ahora! ha! respondido! a! razones!puramente!mecánicas!en! lo!que!a! centros!de!gravedad!y!empuje! se! refiere.! Sin!embargo! también!responde!a!una!mejor!gestión!del!flujo!de!aire!de!la!hélice.!
Es! bien! conocido! que! el! flujo! saliente! de! una! hélice! resulta!más! concentrado! que! el! flujo!entrante,!además!de! la!menor!velocidad.!Por!ello,! lo!cuadricópteros!que!se!han!desarrollado!en!el!ámbito!militar!hasta!ahora!han!tenido!dos!características!que!los!han!diferenciado.!!
Una!de!ellas,!el!llevar!las!hélices!embutidas!en!un!cilindro,!redirigiendo!el!flujo!de!aire.!Este!método!mejora!el!empuje!estático!de!la!hélice!y!puede!conseguir!levantar!la!misma!carga!reduciendo!el! diámetro!de! la! hélice.! Sin! embargo,! para!que! sea!efectivo!han!de! lograrse! apuradas! tolerancias!entre!la!punta!de!la!hélice!y!el!interior!del!cilindro.!Además,!la!creación!del!cilindro!en!si,!añade!peso!a!la!estructura!y!complejidad!mecánica.!!!Es!por!ello!por!lo!que!no!ha!sido!considerado!en!el!diseño.!!
La! otra! característica! que! suelen! equipar! los! equipos! militares! que! presumen! de! grandes!autonomías!son!las!hélices!en!la!parte!inferior!de!los!brazos.!Para!realizar!esta!comprobación,!gracias!al!que!el!paquete!de!software!es!capaz!de! llevar!a!cabo!análisis!de! flujos,!analizaremos! la!posición!inferior!de!la!hélice!comparándola!con!el!mismo!brazo!con!la!hélice!colocada!en!la!parte!superior.!
Ya!que!el!análisis!del!aparato!entero!requeriría!de!demasiado!tiempo!de!computación!y!los!resultados!obtenidos,!en!este!punto!no!serian!de!demasiada!utilidad,!se!procede!a!simular!el!flujo!de!una!única!hélice.!Por!experiencia!previa!se!sabe!que!el!software!realiza!los!cálculos!mas!rápidamente!si!se!le!indica!que!el!flujo!que!ha!de!calcular!es!interno!pero!para!ello!debemos!establecer!la!región!de!estudio.!Se!crea!una!superficie!tronco]cónica,!donde!la!superficie!plana!más!pequeña!coincide!con!

! 49!
el!disco!de!la!hélice!en!diámetro!y!posición!y!otra!superficie!plana!situada!a!150!mm!de!la!hélice!con!un!tamaño!aproximadamente!el!doble!de!ésta.!!
Como!condiciones!de!contorno!establecemos!que!todas!las!superficies,!a!excepción!de!la!que!conforma!el!disco!de!la!hélice,!se!encuentran!a!presión!atmosférica.!Mientras!que!en!la!superficie!de!la!hélice!establecemos!el! flujo!saliente!o!entrante!a!una!velocidad!determinada,!simulando!de!esta!forma!la!hélice.!El!flujo!simulado!es!completamente!perpendicular!a!esa!superficie,!evitando!añadir!vórtices!como!ocurriría!en!una!hélice! tradicional!ya!que!el! tiempo!de!cálculo!aumentaría!de! forma!considerable! y!no! se!esperan!grandes! cambios!en! ! los! resultados.! Tras! comprobar! con!un!mallado!tridimensional!basto!que!la!simulación!se!ejecuta!correctamente,!procedemos!a!realizar!un!mallado!más!fino!para!obtener!mejores!resultados.!!
Para!la!comprobación!de!los!resultados!de!una!forma!más!visual,!se!realizan!dos!cortes!para!obtener! los! perfiles! de! velocidades! uno! de! ellos,! situado! en! la!mitad! del! radio! de! la! hélice! donde!cruza!perpendicularmente!el!brazo!y!el!otro,!cruzando!el!brazo!longitudinalmente.!
!
!
FIGURA!34!–!FLUJO!AIRE!CON!LA!HÉLICE!COLOCADA!EN!POSICION!SUPERIOR!
Como!se!puede!apreciar!en!la!simulación!anterior!(figura!34),!el!aire!saliente!de!la!hélice!sale!de!una!forma!mucho!mas!concentrada,!impactando!directamente!con!el!brazo!a!la!salida.!Como!se!observa,!el!aire!se!ralentiza,!creando!una!presión!en!la!parte!superior!del!brazo,!empujando!el!brazo!hacia!abajo.!Como!es!lógico,!este!comportamiento!del!fluido!resulta!ineficiente!pues!se!está!añadiendo!un!peso!adicional!proporcional!al!empuje!que!demandamos!de!nuestros!motores.!!

! 50!
!
!
!
FIGURA!35!–!FLUJO!DE!AIRE!CON!LA!HÉLICE!COLOCADA!EN!POSICION!INFERIOR!
Sin! embargo,! para! el! caso! en! el! que! la! hélice! se! ubica! en! la! parte! inferior! del! aparato!!podemos!comprobar!cómo!no!se!produce!esa!bajada!de!velocidad!tan!acusada!en!la!parte!superior!del! brazo! evitando! de! esta! forma! la! creación! de! una! fuerza! descendente.! Es! cierto! que! existe!velocidad!nula!en!la!parte!inferior!del!brazo,!sin!embargo!ésta!no!tiene!un!efecto!tan!acusado!sobre!el!aparato.!Esto!se!puede!ver!comparando!los!diagramas!de!presiones.!!
!
FIGURA!36!–!DIFERENCIA!DE!PRESIONES!CON!LA!HÉLICE!COLOCADA!EN!POSICIÓN!SUPERIOR!

! 51!
!
FIGURA!37!]!DIFERENCIA!DE!PRESIONES!CON!LA!HÉLICE!COLOCADA!EN!POSICIÓN!INFERIOR!
!
Como!se!puede!comprobar,!el!flujo!de!aire!!descendente,!crea!un!aumento!de!presión!en!la!!parte!superior!del!brazo,!mientras!que!ocurre!lo!contrario!en!la!parte!inferior!del!brazo.!Esto!es!asi!tanto!para!la!colocación!superior!como!para!la!inferior!de!las!hélices.!Sin!embargo,!como!se!aprecia!en!las!figuras!35!y!36!(Nótese!que!para!la!correcta!lectura!de!la!figura!el!color!relevante!es!el!de!las!isobaras),! esta! diferencia! de! presiones! es! superior! para! el! caso! de! la! hélice! colocada! en! la! parte!superior! del! aparato,! siendo! de! alrededor! de!47Pa!!para! el! caso! de! la! hélice! colocada! de!manera!tradicional!y!de!aproximadamente!21!Pa!para!nuestro!caso.!
Por!tanto,!se!puede!decir!que!al!menos!teóricamente,!se!justifica!la!colocación!de!las!hélices!en!la!parte!inferior!del!aparato!sin!embargo!es!bien!conocido,!que!las!simulaciones!de!fluidos!llevadas!a!cabo!por!elementos!finitos,!no!pueden!mas!que!realizar!una!aproximación!a!la!realidad.!Para!poder!determinar!si!se!consigue!el!efecto!producido,!deberemos!llevar!a!cabo!las!pruebas!de!vuelo!correspondientes.

! 52!
! !

! 53!
!
CAPITULO!6.]!CONCLUSIONES!!
A!través!de!todo!el!proyecto!se!ha!tenido!en!mente!el!objetivo!de!aumentar!la!autonomía!lo!máximo!posible.!El!comenzar!el!diseño!por!el!algoritmo!es!un!muy!buen!punto!de!partida!pues!devuelve! la!combinación! de! vuelo! mas! eficiente,! tanto! para! un! vuelo! estático! como! un! vuelo! dinámico.! Sin!embargo,!la!calidad!de!los!resultados!solo!puede!ser!tan!buena!como!lo!sean!las!bases!de!datos!de!las!que!se!nutre.!Cuanto!mayor!sean!las!bases!de!datos!de!motores!y!hélices,!mejor!será!el!resultado!extraído.!!
Sin! embargo,! el! aumentar! el! número! de! elementos! en! la! base! de! datos,! resultaría! en! un!algoritmo!que!tardaría!un!excesivo!tiempo!en!llevar!a!cabo!todas!las!combinaciones!en!ese!caso!seria!mas!conveniente!recurrir!a!un!tipo!de!optimización!(MILP)!donde!a!pesar!de!una!mayor!complejidad,!el!resultado!se!computa!mas!rápido.!Para!acelerar!el!proceso,!se!podría!haber!realizado!un!filtrado!previo! antes! de! comenzar! los! cálculos! en! el! algoritmo,! pero! hubiera! requerido! una!base! de! datos!demasiado!detallada!y!por!ello!no!pudo!hacerse.!Asimismo,!el!algoritmo!utiliza!como!dato!de!partida!el!número!!de!rotores,! limitando!el!resultado!a!solo!un!tipo!de!configuración!de!multicóptero.!Esta!limitación! podría! eliminarse! haciendo! el! número! de! rotores! una! variable,! proporcionando! pues! el!algoritmo!tanto! los!componentes!a! instalar!como!el!número!de!rotores,!haciendo!así!del!algoritmo!una!solución!completa!para!el!diseño!de!un!multirrotor!eficiente.!!
A! pesar! de! todo! lo! expuesto! anteriormente,! el! algoritmo! proporciona! buenos! resultados.!Como!ya!se!vio!en! la!ecuación! (12)!es!mas!eficiente! !elegir!hélices!de!un!gran! tamaño!que!giran!a!pocas! revoluciones.!Exactamente!esto!es! lo!que!hace!el!algoritmo!con! las!ecuaciones! introducidas.!Resulta! significativo!destacar! también!cómo!el!algoritmo!proporciona!diferentes! resultados!para!el!mismo!peso!dependiendo!del! tipo!de!vuelo!elegido.!Por! tanto!podemos! concluir!que!no! se!puede!tener! un! cuadricóptero! eficiente! en! todo! tipo! de! condiciones,! sino! que! habrá! que! elegir! los!componentes!según!la!misión!que!se!desee!llevar!a!cabo.!
En!cuanto!al!diseño!mecánico,!autonomía!y!bajo!peso!son!sinónimos.!El!diseño!en!fibra!de!vidrio!y!aluminio!logra!un!cuadricóptero!de!bajo!peso!a!la!par!que!resistente.!Sin!embargo,!como!ya!se!ha!visto,!se!requiere!también!que!el!aparato!sea!sencillo!de!reparar!y!con!materiales!fácilmente!accesibles.!Por!ello,!a!priori!parece!que!la!elaboración!de!los!brazos!en!listones!cuadrados!de!madera!parece!una!buena!opción,! sin!embargo,! la!efectividad!está!por!probar! cuando!se! lleven!a! cabo! los!primeros!vuelos.!Es!probable!que!si!todas!las!fases!de!vuelo!son!planificadas!de!una!forma!correcta,!no!se!produzcan!incidentes!tal!y!como!se!espera!y!por!tanto!!los!brazos!no!necesitarían!reemplazarse!tan! a!menudo,! pudiendo! realizarse! en! algún! compuesto!mas! ligero,! tales! como! tubos! de! fibra! de!carbono!o!aluminio.!

! 54!
! !
FIGURA!38!]!RENDERIZADO!DE!LA!ESTRUCTURA!FINAL!
La!configuración!poco!ortodoxa!de!los!componentes,!como!se!ha!demostrado,!ha!permitido!mejorar!la!eficiencia!del!aparato.!La!colocación!inferior!de!las!hélices!ha!permitido!lograr!una!menor!diferencia!de!presiones!en!ambos!lados!de!la!hélice!reduciendo!la!fuerza!que!ejerce!el!flujo!de!aire!en!dirección!descendente.!Esta!fuerza!podría!haberse!reducido!con!la!colocación!de!brazos!circulares!!los!cuales!presentan!una!mejor!aerodinámica!sin!embargo!el!diseño!mecánico!se!complica!en!gran!medida! pues! se! requieren! piezas! adicionales! para! fijar! los! componentes! es! por! ello! que! no! se! ha!llevado! a! cabo! de! esta! forma.! De! la! misma! forma,! esta! configuración! ha! permitido! el! acercar! el!centro!de!empuje!de! los!motores!al!centro!de!gravedad!del!aparato,! logrando!una!mejor!dinámica!del! aparato! y! un!mejor! control,! lo! que! resulta! en!menos! esfuerzo! por! parte! de! los!motores! para!posicionar!el!aparato!en!el!aire!y!por!tanto!un!menor!consumo!eléctrico!alargando!así!la!autonomía!del!aparto.!
! Por!todo!lo!expuesto!anteriormente,!podemos!asegurar!que!se!ha!creado!un!cuadricóptero!eficiente!a!la!par!que!robusto!y!de!fácil!mantenimiento.!Es!por!ello!que!resulta!idóneo!para!el!uso!por!parte!de!ONG.!Sin!embargo,!como!ocurre!con!todos!los!vehículos!aéreos!no!se!podrá!determinar!su!verdadera!efectividad!hasta!que!se!realicen!todas!las!pruebas!pertinentes!y!se!acumulen!decenas!de!horas!de!vuelo.!Será!entonces!cuando!el!vehículo!pueda!entrar!en!funcionamiento!para!ser!utilizado!para!labores!humanitarias.!Sin!embargo,!se!deberá!seguir!monitorizando!el!estado!del!aparato!para!llevar! el! mantenimiento! preventivo! correspondiente! y! asegurar! el! realizar! vuelos! seguros! y! sin!incidentes!alcanzando!los!objetivos!requeridos.!!
! Por!tanto,!y!para!concluir!las!principales!características!!de!diseño!son!las!siguientes:!
• Peso!de!la!estructura!:!690!g!• Motores!:!3508]580KV!Turnigy!Multistar!14!Pole!Brushless!(4!uds.)!• Hélice:!GWS!EP!Counter!Rotating!Propeller!(RH]1047)!(4!uds.)!• Bateria:!NCR18650B!(8!uds.)!• Peso!total:!1644g!(+500g!de!carga)!• Estructura!realizada!en!madera,!fibra!de!vidrio!y!aluminio!• Alta!reparabilidad!• Bajas!vibraciones!en!instrumentos!de!vuelo!

! 55!
!
BIBLIOGRAFIA!
[1] 3DRobotics.!2014.!DIYdrones.com.!
[2] aundes,! Nicolas,! Volker! Wunsch,! Stefan! Hohnstein,! Benjamin! Glass,! and! Marcus,! Vetter.!«Research!paper!on!the!topic!of!different!UAV!drive!train!qualification!and!parameter!sets.»!Digital&Avionics&Systems&Conference&(DASC),.!IEEE,!2013.!
[3] Almurib,!H.A.F.,!P.T.!Nathan,!and!T.N.!Kumar.!«Control!and!path!planning!of!quadrotor!aerial!vehicles!for!search!and!rescue.»!Proceedings&of&SICE&Annual&Conference&(SICE),!2011.!
[4] Bluteau,! B.,! R.! Briand,! and! O! Patrouix.! «Design! and! Control! of! an! Outdoor! Autonomous!Quadrotor!powered!by!a!four!strokes!RC!engine.»!Conference&on&IEEE&Industrial&Electronics.!IECON,!2006.!
[5] Bouabdallah,! Samir.! «Design! and! Control! of! Quadrotors! with! Application! to! Autonomous!Flying.»!École&Polytechnique&Fédérale&de&Lausanne.&,!2007.!
[6] Devaud,!J.,!S.!Najko,!P.!Le!Nahedic,!C.!Maussire,!E.!Zante,!and!J.!Marzat.!«Full!design!of!a!low]cost!quadrotor!UAV!by!student!team.»! International&Conference&on&System&Engineering&and&Technology&(ICSET).!2012.!
[7] Flynn,!E.P.!«Low]cost!approaches!to!UAV!design!using!advanced!manufacturing!techniques.»!Integrated&STEM&Education&Conference&(ISEC).!2013.!
[8] Gupte,! S.,! P.I.T.! Mohandas,! and! J.M! Conrad.! «"survey! of! quadrotor! Unmanned! Aerial!Vehicles".»!Proceedings&of&IEEE,!2012.!
[9] Gebauer,! J.,! P.! Koci,! and! P.! Sofer.! «Multicopter! potentialities.»!15th& IFAC&World& Congress.!Barcelona,!2002.!
[10] Hoffer,! N.V.,! C.! Coopmans,! A.M.! Jensen,! and! YangQuan! Chen.! «Small! low]cost! unmanned!aerial! vehicle! system! identification:!A! survey! and! categorization.»! International& Conference&on&Unmanned&Aircraft&Systems&(ICUAS).!2013.!
[11] Lim,! Hyon,! Jaemann! Park,! Daewon! Lee,! and! H.J.! Kim.! «Build! Your! Own! Quadrotor:! Open]Source!Projects!on!Unmanned!Aerial!Vehicles.»!Robotics&&&Automation&Magazine!(IEEE)!19,!no.!3.!
[12] Mellinger,! D.,!Nathan!Michael,!M.! Shomin,! and!V.,! Kumar.! «Recent! advances! in! quadrotor!capabilities,.»!Conference&on&Robotics&and&Automation&(ICRA).!2011.!
[13] Phang,!Swee!King,!Chenxiao!Cai,!B.M.!Chen,!and!Tong!Heng!Lee.!«Design!and!mathematical!modeling! of! a! 4]standard]propeller! (4SP)! quadrotor.»! 10th& world& congress& on& Intelligent&control&and&automation&.!2012!.!
[14] Pounds,! P.,! and! R.,! Mahony.! «Design! principles! of! large! quadrotors! for! practical!applications,.»!International&Conference&on&Robotics&and&Automation.!2009.!

! 56!
[15] Sa,! R.C.,! G.A.! Barreto,! A.L.C.! de! Araujo,! and! A.T.,! Varela.! «Design! and! construction! of! a!quadrotor]type! unmanned! aerial! vehicle:! Preliminary! results.»! Workshop& Engineering&Applications&(WEA),!2012.!
[16] Spakovszky,! Prof.! Z.! S.! Unified:& Thermodynamics& and& Propulsion.! 2014.!http://web.mit.edu/16.unified/www/FALL/thermodynamics/notes/node86.html.!
!
!
!
! !

! 57!
ANEXO!A!–ALGORITMO!DE!OPTIMIZACIÓN!
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Algoritmo de optimizacion de caracteristicas de un multirrotor %Rodrigo Álvarez %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% load('Bases de Datos') %Datos Atmosfericos %no se necesitan %Datos Estructura Pest=1.5 %Peso de la estructura [kg] Nr=4 %número de rotores ITERACION=1 %%%%%%%%Bucle Bateria for NBateria= 1:size(BDbaterias) %%%%%%%%Bucle Motor for NMotor=1:size(BDmotores) %%%%%%%%Bucle Helice for NHelice=1:size(BDhelices) CASO(ITERACION).PosMot=NMotor; CASO(ITERACION).PosBat=NBateria; CASO(ITERACION).PosHel=NHelice; %Asumimos una eleccion de motores ESC y bateria %Datos Bateria CASO(ITERACION).BATERIA=BDbaterias.NOMBRE(NBateria); S=BDbaterias.TENSION(NBateria) / 3.7 ;%Nº de celdas en serie P=1; %Nº de celdas en paralelo MAH=BDbaterias.CAPACIDADmah(NBateria); %Capacidad en MAH Rb=BDbaterias.Rint(NBateria)*0.001; %resistencia interna de la bateria Vc=3.7; %Tension celda de litio Ccont=BDbaterias.Ccont(NBateria); %capacidad de descarga continuada [se mide en capacidades] Cmax=BDbaterias.Cmax(NBateria); %%capacidad de descarga pico [se mide en capacidades] Pbat=BDbaterias.PESO(NBateria)/1000; %Peso de la bateria [kg] %Datos ESC ESCmax= 30; %maxima corriente que soporta el ESC Resc=0.008; %ohm Pesc=0.040; %peso ESC en Kg %Datos Motor CASO(ITERACION).MOTOR=BDmotores.NOMBRE(NMotor); Kv=BDmotores.KV(NMotor); %[RPM]/V Io=0.9; %Corriente ensayo de vacio Vo=11; %Tension ensayo de vacio Plim=BDmotores.TENSINMXV(NMotor)* BDmotores.CORRIENTEMXA(NMotor); %potencia limite del motor [W] Rarr= 0.09; %resistencia de arrollamientos Pmot=BDmotores.PESOg(NMotor)/1000; %peso motor KG %Datos Helice CASO(ITERACION).Helice=BDhelices.NOMBRE(NHelice); Dh=BDhelices.DIAMETRO(NHelice); %Diámetro helice en pulgadas

! 58!
Ph=BDhelices.PITCH(NHelice); %Pitch helice en pulgadas Pcon=BDhelices.CTE(NHelice); %constante de la hélice A=BDhelices.A(NHelice)* 10^-6; B=BDhelices.B(NHelice); %ecuacion fuerza-rpm f=A*rpm^B en esta ecuacion la fuerza va en gramos if (~isnan(A)) || (~isnan(B) ) %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Datos derivados de la bateria Ibatcont=Ccont*MAH/1000; Ibatmax=Cmax*MAH/1000; Vbat=Vc*S; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Datos derivados del motor Kt=30/pi /Kv ;%kv en rpm/v y Kt en nm/A Io=Io*(Vbat/Vo)^0.75; Icc=Vbat/Rarr; %intensidad de rotor bloqueado nmax=(1-sqrt(Io/Icc))^2; %rendimiento máximo Inmax=sqrt(Io*Icc); %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Suma de Pesos Ptot=(Pest+Nr*(Pesc+Pmot))*1.1+ Pbat; %La suma del peso total es la suma de %todos los componentes menos la bateria con un 10% de margen %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %calculo de parametos en Hover CASO(ITERACION).Pmothov=Ptot/Nr; %peso que ha de sustentar un motor en hover CASO(ITERACION).Rpmhov=( CASO(ITERACION).Pmothov*1000/A)^(1/B); CASO(ITERACION).Whov= CASO(ITERACION).Rpmhov*2*pi /60; CASO(ITERACION).Phov=Pcon*Ph*Dh^4 * CASO(ITERACION).Rpmhov^3*5.33*1e-15 ;%el factor 5.33 tiene en cuenta densidad altura y temperatura CASO(ITERACION).Jhov= CASO(ITERACION).Phov/ CASO(ITERACION).Whov; CASO(ITERACION).Ihov=Io+ CASO(ITERACION).Jhov/Kt; CASO(ITERACION).Vhov=Vbat-( CASO(ITERACION).Ihov*(Rb+Resc)); CASO(ITERACION).Vmot=( CASO(ITERACION).Ihov*Kv*Rarr+ CASO(ITERACION).Rpmhov)/Kv; CASO(ITERACION).Dbathov=MAH/ CASO(ITERACION).Ihov /1000 /Nr *60; %en minutos CASO(ITERACION).Pth= CASO(ITERACION).Vmot/ Vbat * 100; %De control para mantener el hover %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Cálculo de parámetros a maxima potencia %Vbatn=0; %Vbatn=Vbat*0.9; %Vbatn2=2*Vbat; %Diferencia=5; %while Diferencia>0.05 %utilizar fsolve RPMmax=Kv*Vbatn; %Wmax=RPMmax*2*pi /60; %Pmax=Pcon*Ph*Dh^4 * RPMmax^3*5.33*10^-15; Jmax=Pmax/Wmax; %Imax=Io+Jmax/Kt; %Vbatn2=Vbat-Imax*(Rb+Resc); %Diferencia=Vbatn2-Vbatn; %%%%%%%%%%Cambiado de orden %Vbatn=Vbatn-Imax*(Rb+Resc);

! 59!
%end % x(1)=RPMmax % x(2)=Vbat % x(3)=Imax % x(4)=Pmax OPTIONS = OPTIONS = optimoptions(@fsolve,'MaxFunEvals',1000); OPTIONS = optimset('Diagnostics','off', 'Display','off'); sol=fsolve(@(x) [ x(1)-Kv*x(2); x(2)-Vbat+x(3)*(Resc+Rb); ... x(4)-Pcon*Ph*Dh^4 * x(1)^3*5.33*10^-15; ... x(3)-Io-x(4)/x(1)/pi*30/Kt],[8000;20;12;200],OPTIONS);; Vmax=Vbatn; CASO(ITERACION).RPMmax=RPMmax; %Guardo variables a estructura CASO(ITERACION).Wmax=RPMmax/pi*30; CASO(ITERACION).Pmax=Pmax; CASO(ITERACION).Jmax=Pmax/RPMmax/pi*30/Kt; CASO(ITERACION).Imax=Imax; CASO(ITERACION).Fmax=Nr*A*RPMmax^B; CASO(ITERACION).Dbatmax=MAH/Imax /1000 /Nr *60; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Cálculo de parámetros a maxima eficiencia CASO(ITERACION).Ieff=sqrt(Icc*Io); CASO(ITERACION).Jeff= ((CASO(ITERACION).Ieff - Io)*Kt; CASO(ITERACION).Peff=( CASO(ITERACION).Ieff-Io)*(Icc- CASO(ITERACION).Ieff)*Rarr; CASO(ITERACION).Weff= CASO(ITERACION).Peff/ CASO(ITERACION).Jeff; CASO(ITERACION).RPMeff= CASO(ITERACION).Weff*30/pi; CASO(ITERACION).Vbateff=Vbat- CASO(ITERACION).Ieff*(Resc+Rb); CASO(ITERACION).Vmot=( CASO(ITERACION).Ieff*Kv*Rarr+ CASO(ITERACION).RPMeff)/Kv; CASO(ITERACION).Ptheff=CASO(ITERACION).Vmot/ CASO(ITERACION).Vbateff *100; CASO(ITERACION).Dbateff=MAH/ CASO(ITERACION).Ieff /1000 /Nr *60; %Calculo del precio de componentes CASO(ITERACION).Preciototal=Nr * (BDmotores.COSTE(NMotor)+ BDhelices.COSTE(NHelice)) + BDbaterias.COSTE(NBateria); %LIMITACIONES DE FUNCIONAMIENTO CASO(ITERACION).VIABILIDAD=1; if CASO(ITERACION).Ihov>Ibatcont CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Ieff>Ibatcont CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Imax>Ibatmax CASO(ITERACION).VIABILIDAD=0; end if Vbat>BDmotores.TENSINMXV(NMotor) CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Imax>BDmotores.CORRIENTEMXA(NMotor) CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Ihov<0 CASO(ITERACION).VIABILIDAD=0; end

! 60!
if CASO(ITERACION).Vhov<.85*Vbat CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Vmot<.85*Vbat CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Ihov<0 CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Imax<0 CASO(ITERACION).VIABILIDAD=0; end if CASO(ITERACION).Vbateff<.85*Vbat CASO(ITERACION).VIABILIDAD=0; end ITERACION=1+ITERACION; helices=size(BDhelices); motores=size(BDmotores); baterias=size(BDbaterias); ITERACION/(helices(1)*motores(1)*baterias(1)) *100 end end end end
! !

! 61!
ANEXO!B]ALGORITMO!PARA!EL!ANÁLISIS!DE!LOS!RESULTADOS!
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Análisis de resultados %Rodrigo Álvarez %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% Nresultados=1 for Ncaso= 1:184800 if CASO(Ncaso).VIABILIDAD==1 RESULTADO(Nresultados)=CASO(Ncaso); Nresultados=Nresultados+1; end end [val,POS]=max([RESULTADO.Dbathov]); disp('Combinacion maxima duracion en hover') RESULTADO(POS) [val,POS]=max([RESULTADO.Dbatmax]); disp('Combinacion maxima duracion al maximo') RESULTADO(POS) [val,POS]=max([RESULTADO.Dbateff]); disp('Combinacion maxima duracion en eficiencia') RESULTADO(POS)

! 62!
! !

! 63!
!
ANEXO!C]!ANÁLISIS!DATOS!BANCO!DE!ENSAYOS!
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Análisis datos hélice %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% lim_bajo=5.2E4; lim_alto=1.2E5; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Paso RPM a rad/s Wr=n_rpm(:,2)*2*pi/60; %Paso kg fuerza a N Fvertical=v_force(:,2)*9.81; Par=v_torque(:,2)*9.81; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Cálculo potencia mecánica Pmec=times(Par,Wr); %Cálculo potencia electrica Pele=times(I_mot(:,2),V_mot(:,2)); %eficiencia Ef=Pmec./Pele * 100; %%%%%FALLA ro=1.13; D=12*0.0254; Ct= Fvertical(lim_bajo:lim_alto) ./ ro ./ (n_rpm(lim_bajo:lim_alto,2)).^2 / D^4; %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% %Gráficas %empuje vs rpm figure(2) plot(n_rpm([lim_bajo:lim_alto],2)-500,v_force([lim_bajo:lim_alto],2)) legend('Empuje vertical vs RPM') xlabel('RPM') ylabel('Fuerza Vertical[g]') title('RPM vs Fuerza Vertical') %pause %Par vs rpm figure(3) plot(n_rpm([lim_bajo:lim_alto],2)-500,v_torque([lim_bajo:lim_alto],2)-30) legend('par vs RPM') legend('Par vs RPM') xlabel('RPM') ylabel('Par[g-cm]') title('RPM vs Torque') %Imot vs RPM figure(4) plot(n_rpm([lim_bajo:lim_alto],2)-500,I_mot([lim_bajo:lim_alto],2)-0.23) legend('Corriente vs RPM') xlabel('RPM') ylabel('I[A]') title('Corriente vs RPM') %Imot Vs Vmot figure(5) plot(V_mot([lim_bajo:lim_alto],2),I_mot([lim_bajo:lim_alto],2)) legend('Tension Vs Corriente')

! 64!
xlabel('V motor [V]') ylabel('I[A]') title('Tension Vs Corriente') %Ct vs Rpm figure(6) plot(n_rpm([lim_bajo:lim_alto],2) , (Ct)) legend('Ct vs rpm') xlabel('RPM') ylabel('Ct') title('Ct vs rpm')
! !

! 65!
ANEXO!D!–!PLANOS!
!
1. Plano!de!conjunto!del!cuadricóptero!1.1. Plano!de!conjunto!de!la!estructura!Interior!1.1.1. Plano!conjunto!del!brazo!completo!1.1.1.1. Plano!soporte!motor!1.1.1.2. Plano!brazo!
1.1.2. Placa!sucia!1.2. Plano!chasis!superior!1.3. Plano!chasis!inferior!

10
1
7
9
4
5
6
2
8
3
MARCA PIEZA DESCRIPCIÓN UDS.
10 ISO 4017 - M3 x 6-N Tornillos Nylon 42
9 silentblock Elemento Antivibratorio 48 tren de aterrizaje 2
7 separadores 40mm Elemento estandar 18
6 Chasis inferior 2
5 Chasis superior 1
4 Placa Sucia 2
3 Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St Pasador de retención 16
2 soporte motor ver 2 4
1 brazo ver 2 4
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroVARIOS
1.0 (1/2)1:5
J. PORRAS 26-May-14CONJUNTOR. ALVAREZ 06-Mar-14
690.81 gramos

silentblock
Chasis inferior
separadores 40mm
Chasis superior
tren de aterrizaje
Estructura interior
ISO 4017 - M3 x 6-N
937.28
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroVARIOS
1.0 (2/2)1:3
J. PORRAS 26-May-14GENERAL EXPLOSIONADAR. ALVAREZ 06-Mar-14
690.81 gramos
PARTE DESCRIPCION UDS.Chasis superior 1
Chasis inferior 2separadores 40mm Elemento estandar 18
tren de aterrizaje 2
Estructura interior 1silentblock Elemento Antivibratorio 4ISO 4017 - M3 x 6-N Tornilleria M3 42

4
1
3
MARCA PIEZA DESCRIPCIÓN UDS.
4 Placa Sucia 2
3 Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St Pasador de retención 16
2 soporte motor ver 2 4
1 brazo ver 2 4
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroVARIOS
1.1 (1/2)1:5
J. PORRAS 26-May-14ESTRUCTURA INTERIORR. ALVAREZ 06-Mar-14
411.84 gramos

brazo montado
Placa Sucia
Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroVARIOS
1.1 (2/2)1:4
J. PORRAS 26-May-14INTERIOR EXPLOSIONADOR. ALVAREZ 06-Mar-14
411.84 gramosPIEZA DESCRIPCION UDS.Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St Pasador de retención 8
brazo montado 4Placa Sucia 2

2
1
3
MARCA PIEZA DESCRIPCIÓN UDS.
3 Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St Pasador de retención 2
2 soporte motor ver 2 1
1 brazo ver 2 1
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
Cuadricoptero
1.1.1 (1/2)1:2
J. PORRAS 26-May-14Brazo MontadoR. ALVAREZ 06-Mar-14

Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St
soporte motor ver 2brazo ver 2
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
Cuadricoptero
1.1.1 (2/2)1:2
J. PORRAS 26-May-14Montaje BrazoR. ALVAREZ 06-Mar-14
gramos Cuadricoptero
11:2
J. PORRAS 26-May-14Montaje BrazoR. ALVAREZ 06-Mar-14
gramosPARTE DESCRIPCION UDS.
brazo ver 2 1soporte motor ver 2 1Clevis Pin ISO 2341 - B - 4 x 26 x 1 - St Pasador de retención 2

15 20
17
5
5
163
15
15
25
25
R10
45°
12x3.10
ESPESOR: 1mm
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroZoltek Panex 33
1.21:1
J. PORRAS 26-May-14SOPORTE SUPERIORR. ALVAREZ 06-Mar-14
49.06 gramos

150
200
140
205.92
75 70
60
58
5
5 5
20
R7.50
17
50
60
30
R6 R6
8x3.10 8x3.10
2x3.10
3.10
45°
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroZoltek Panex 33
1.31:2
J. PORRAS 26-May-14SOPORTE INFERIORR. ALVAREZ 06-Mar-14
92.61 gramos
ESPESOR: 1mm
ESPESOR: 1mm

R70 R80
75
45
45
45°
20
4.25 5
15
125
65
45°
R2.50
43.40
61.58
45°
R2.50
34.24
10
21.92
ESPESOR: 1mm
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroS-Glass Fiber
1.1.21:1
J. PORRAS 26-May-14SOPORTE CENTRALR. ALVAREZ 06-Mar-14
36.48 gramos

61.44
30
15
20.23 1
0.25
5 24
20.
50
70
21
40
4.10
20 5
9.5
0
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
Cuadricoptero6061-0
1.1.1.12:1
J. PORRAS 26-May-14SOPORTE MOTORR. ALVAREZ 06-Mar-14
10.21 gramos
ESPESOR: 1mm
R0.74

400
20
20
10 4.10
10
20
10
20
4.1
0
10
1
F
E
D
32 4
C
B
1
A
32 4
I.C.A.I.
NOMBRE
5
MATERIALPESO
ESCALA:COMPROBADODIBUJADO
76 8
Nº PLANO
F
E
D
5 6 7
C
B
8
A
FIRMA
FECHA
CuadricopteroAbeto
1.1.1.21:2
J. PORRAS 26-May-14BRAZOR. ALVAREZ 06-Mar-14
73.11 gramos