4.1 Dimensionado de la estructura. -...
50
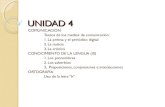
4. CÁLCULOS DE LOS ELEMENTOS A CONSIDERAR. 4.1 Dimensionado de la estructura. Hipótesis y consideraciones generales. • Empleo de acero estructural del tipo S355 J0W, compuesto por una aleación mejorada que le permite una mayor resistencia a la corrosión atmosférica, como es el caso de ambiente marino donde se llevará a cabo nuestra actividad. Límite elástico mínimo y Resistencia a tracción (N/mm2) Tipo Espesor nominal de la pieza, t (mm) t ≤ 40 40 < t ≤ 80 Límite elástico, fy Resistencia a tracción, fu Límite elástico, fy Resistencia a tracción, fu S 235 J0W 235 360 < fu < 510 215 360 < fu < 510 S 235 J2W 235 360 < fu < 510 215 360 < fu < 510 S 355 J0W 355 490 < fu < 680 335 470 < fu < 630 S 355 J2W 355 490 < fu < 680 335 470 < fu < 630 S 355 K2W 355 490 < fu < 680 335 470 < fu < 630 Propiedades de los aceros según la normativa europea EN 10025-2:2004 • La maniobra de elevación supondrá la que determinará el caso más desfavorable frente a los efectos de la inercia y del viento siempre y cuando la carga sea asegurada en determinadas maniobras ya que, como se estudiará posteriormente, algunas de estas maniobras tales como la frenada en pendiente mientras se realiza una traslación de descenso si se dejase la carga libre ésta podría oscilar como si fuese un péndulo poniendo en peligro la seguridad y estabilidad del travelift. Dado que el objetivo del travelift es que la embarcación a cargar no golpee el suelo implicará que el centro de gravedad de la embarcación no se encuentre muy alto de modo que el viento podrá despreciarse frente a las cargas originadas por la embarcación sobre la estructura. • Siguiendo las indicaciones de la norma UNE 58132-2: No se tendrán en cuenta las sobrecargas de nieve en el calculo de los aparatos de elevación. Además, dada la tipología de la grúa, las zonas de acumulación de nieve son las vigas de la misma, lo cual, aunque se podría acumular cierta cantidad de nieve encima, no serán zonas de acumulación fijas, como pudiera ser el caso de una geometría en V, por ejemplo. • Por seguridad, se evitará dejar la grúa a la intemperie ante la amenaza de mal temporal. [UNE 13001-2] 1
Transcript of 4.1 Dimensionado de la estructura. -...

4. CÁLCULOS DE LOS ELEMENTOS A CONSIDERAR.
4.1 Dimensionado de la estructura.
Hipótesis y consideraciones generales.
• Empleo de acero estructural del tipo S355 J0W, compuesto por una aleación mejorada que le permite una
mayor resistencia a la corrosión atmosférica, como es el caso de ambiente marino donde se llevará a cabo
nuestra actividad.
Límite elástico mínimo y Resistencia a tracción (N/mm2)
Tipo
Espesor nominal de la pieza, t (mm)
t ≤ 40 40 < t ≤ 80
Límite elástico, fyResistencia atracción, fu
Límite elástico, fyResistencia atracción, fu
S 235 J0W 235 360 < fu < 510 215 360 < fu < 510
S 235 J2W 235 360 < fu < 510 215 360 < fu < 510
S 355 J0W 355 490 < fu < 680 335 470 < fu < 630
S 355 J2W 355 490 < fu < 680 335 470 < fu < 630
S 355 K2W 355 490 < fu < 680 335 470 < fu < 630
Propiedades de los aceros según la normativa europea EN 10025-2:2004
• La maniobra de elevación supondrá la que determinará el caso más desfavorable frente a los efectos de la
inercia y del viento siempre y cuando la carga sea asegurada en determinadas maniobras ya que, como se
estudiará posteriormente, algunas de estas maniobras tales como la frenada en pendiente mientras se realiza
una traslación de descenso si se dejase la carga libre ésta podría oscilar como si fuese un péndulo poniendo en
peligro la seguridad y estabilidad del travelift.
Dado que el objetivo del travelift es que la embarcación a cargar no golpee el suelo implicará que el centro de
gravedad de la embarcación no se encuentre muy alto de modo que el viento podrá despreciarse frente a las
cargas originadas por la embarcación sobre la estructura.
• Siguiendo las indicaciones de la norma UNE 58132-2:
No se tendrán en cuenta las sobrecargas de nieve en el calculo de los aparatos de elevación.
Además, dada la tipología de la grúa, las zonas de acumulación de nieve son las vigas de la misma, lo cual,
aunque se podría acumular cierta cantidad de nieve encima, no serán zonas de acumulación fijas, como
pudiera ser el caso de una geometría en V, por ejemplo.
• Por seguridad, se evitará dejar la grúa a la intemperie ante la amenaza de mal temporal. [UNE 13001-2]
1

• La tipología de la grúa permitirá las dilataciones y contracciones originadas por los gradientes de temperatura
sin restricciones, evitando que aparezcan tensiones en la estructura originadas por este fenómeno.
• Se considerará una desviación de la carga de 0.5 m durante la elevación de la carga debido a un error en la
precisión del operario al colocar las eslingas provocando que unas eslingas carguen más que otras
distinguiéndose por tanto lo que se denominará como zona 1 y zona 2 así como también se considerará el caso
de reparto equitativo de cargas entre las eslingas.
Qg,2
Qc2
Qg,1
Qc2
Qc1
Zona 1Zona 2
Qc1 Qc1Qc2
2
Qc2 Qc1

Zona 1: Zona más cercana de aquella donde convergen el pilar y la viga de atado que une ambos pórticos y se
considerará que es la zona donde se encuentra situada la eslinga más cargada.
Zona 2: Zona más alejada de aquella donde convergen el pilar y la viga de atado que une ambos pórticos y donde
se encontrará la eslinga descargada..
Qg,i: Carga experimentada en el gancho situado en la zona 1 si “i”: 1 (gancho pertenece al pórtico 1), 1'
(gancho pertenece al pórtico 2) o bien el gancho estará en la zona 2 si “i”: 2, 2' , sin estar afectada por el
coeficiente de seguridad .
Como mencionamos anteriormente, en este caso, ambos pórticos trabajarán simétricamente por lo que
Qg,1=Qg,1' y Qg,2=Qg,2'.
Qc,i: Carga experimentada por el cable y cuya nomenclatura a emplear será similar a la empleada para el
gancho.
• Además de las hipótesis de error cometido al elevar la carga se tendrán en cuenta que dicha maniobra se
ejecutará en dos localizaciones diferentes:
• Desde la marina seca:
Es donde se encuentra almacenados los barcos, normalmente colocados sobre unos soportes de madera
que evitan el contacto del casco con el suelo.
Se supondrá que al elevar la carga en esta zona se producirá un desvío máximo ( v=6,34º ) de los
ganchos de elevación con respecto a la vertical, provocando que los pórticos no trabajen únicamente en
su plano, sino que surgirá una componente de la solicitación que hará que trabajen paralelamente al plano
horizontal, sometiendo a altas compresiones a la viga de atado.
• Desde el muelle:
Considerándose que el agua se encuentra a 6 metros por debajo del muelle, a la hora de llevar a cabo el
izado de la misma no se producirá el desvío de los ganchos de elevación respecto a la vertical tal y como
se estudió con anterioridad, de modo que los pórticos trabajarán en su plano.
• La conexión eslingas-ganchos así como las poleas con la estructura se comportarán como articulaciones de
modo que la trasmisión de esfuerzos se harán a través del cable de modo que no se experimentará torsión
directamente sino que, al desplazarse el centro de gravedad debido a la carga, se cargará una eslinga más que
la otra al igual que se cargará un pórtico más que otro si dicho centro se acerca o aleja de uno de los pórticos
a causa del viento, por ejemplo.
• Se dimensionarán los perfiles de modo que se no se produzcan fenómenos de inestabilidad alguno que pongan
en riesgo la actividad a realizar tales como pandeo, pandeo lateral y fenómenos de plastificación en las
secciones para las hipótesis anteriormente mencionadas.
3

• Dada la tipología de la estructura se considerarán admisibles desplazamientos que no rebasen los 15 mm ya
que un valor superior podría poner en peligro la estabilidad de la estructura.
• Se considerarán que existe trasmisión tanto de fuerzas como de momentos en los nudos por lo que
los nudos se tratarán como uniones rígidas y, por tanto. la longitud de pandeo definida como
Lk=β ·l =l barras
2, ya que para el caso de barras biempotradas le corresponde un coeficiente
β=1
2.
Valores de los coeficientes y y z
Factores amplificadores considerados.
Se emplearán como normativas de seguridad las normas UNE-EN13001-1, UNE-EN13001-2 y UNE-
EN15011 para la obtención de las secciones a implementar así como los factores de amplificación dinámica
'i' a considerar y que vienen determinados por el tipo de elementos de izado y arrastre empleados durante
las diferentes maniobras que podrá realizar el travelift.
Posteriormente se procederá al calculo de las cargas 'fi' asociadas a las distintas acciones que tendrán lugar
sobre la estructura y se le aplicarán una serie de coeficientes de seguridad ' p' para realizar la combinación
de cargas tal y como alude la normativa UNE-EN13001-2:2011, debiendo de verificarse para todas las
combinaciones los estados límites últimos de resistencia y estabilidad así como no superar en los nodos los
15 mm de desplazamiento.
4

Cálculo coeficientes dinámicos según UNE_EN_ISO 13001_2:2011
y UNE_EN_ISO 15011:2011.
-Efectos derivados de la elevación de la carga y de la gravedad sobre la masa de la grúa. ( )
Dado que no se emplea contrapeso de ningún tipo que contrarreste el efecto de la carga la grúa se clasificará dentro de
la categoría MDC1 de reparto de masas y, por tanto, se le asociará a los elementos de la grúa un coeficiente de
amplificación dinámico de ϕ1=1,1. además de un coeficiente de seguridad γ p=1,22.
-Efecto de la inercia y de la gravedad que actúan verticalmente sobre la carga de elevación. (2)
Para llevar a cabo el cálculo del factor amplificador ϕ 2 se hallará en primer lugar el valor de
ϕ2t(vhmax ,R r ,l r ,Z a) , según la normativa UNE-EN-15011 quedando definida la clase de elevación HC
correspondiente .
Una vez definida la clase de elevación HC, se deberá acudir a la normativa UNE EN 13001-2 Tabla 2 quedando
definidos los coeficientes auxiliares ϕ2min y β 2 .
En último lugar, para poder estimar el valor del coeficiente ϕ 2 se deberá tener en cuenta no solo el tipo de
mecanismo de elevación, sino también el método de funcionamiento que nos determinará, en función del tipo de
combinación de carga, que velocidad de elevación emplear.
Puesto que se emplearán cables para la elevación en lugar de cadenas:
Se puede observar como ϕ2t depende de la naturaleza del cable a emplear en la elevación a través de su resistencia,
longitud y coeficiente de utilización.
5

Las características del cable a emplear se definen a continuación:
Coeficiente real de utilización.
Zα=RoturaCable
CargaElevación=6,4
Donde:
• RoturaCable (kN)= 8·4·FUltimaCable(kN)=3200
◦ Donde :
▪ 8: Nº de reenvio de cables.
▪ 4:Nº de ganchos que tiran de la carga.
▪ FultimaCable(kN)=100
• CargaElevación(kN)=500
Clase del cable según norma EN 12385-4
Se empleará una calidad del cable 1960, de modo que la resistencia a tracción media ronde este valor: (1960 N/mm2),
con una longitud de cable total de a considerar l r(m)=113 , ya que
l r(m)=nº ReenviosPoleas·nº Ganchos ·metros AguaPoleaSuperior
La velocidad de elevación máxima tendrá un valor: vh ,max =0,1m / s se obtendrá un valor de:
Como el tipo de mecanismo de elevación a emplear va a ser del tipo HC1 se tendrán unos valores :
ϕ2t=1,05⇒Tipo de mecanismo de elevación HC1
β2=0,17 ,ϕ2min=1,005
6

Puesto que se emplearán motores electrohidráulicos así como electroválvulas para controlar la operación de elevación
el mecanismo se clasificará dentro de la categoría HD4:
A modo de resumen :
Cálculoϕ2
ϕ2, min 1,01
β2 0,17
vh ,max (m/s) 0,1
ϕ2 1,01
7

– Efectos ocasionados por la aceleración de los mecanismos de arrastre.( 5. )
El factor 5 va a depender de factores como: tipo de maniobra que estemos realizando con la grúa, el tipo de trasmisión
empleado, el rango de velocidad aplicado, desajuste funcional considerado así como la clase de posicionamiento de la
carga según normativa y afectará a todas aquellas maniobras que se vean sometidas a fuerzas de inercia.
Se procederá al cálculo de los coeficientes dinámicos 5 según el tipo de maniobra teniendo en cuenta que el sistema
de control de elevación vendrá controlado mediante electroválvulas otorgando al sistema un control de la velocidad
continuo y progresivo.
Desplazamiento 1:100 1,1 1,4
Avance 1:100 1,1 1,4
Rotación 1:100 1,1 1,4
Subida Bajada
Elevación 1:100 1,05 1,1
Tipo Trasmisión Selecc. Elevación Movimientos Horizontales
Control Velocidad Progresiva P0 P1
P0 & P1 1,00
Si: Efecto inicial provocado por Fi
a: Aceleración o deceleración
m: Masa a la que se aplica
Tipo Trasmisión Mecanismo
Rango Velocidad Aplicada
Factor 5
Desajuste funcional mínimo
Desajuste Considerable
Control velocidad continuoControl
velocidad continuo
Control velocidad continuo
Control velocidad continuo
Factor p
Factor_ p
Clase de posicionamiento de la carga conforme a la norma EN_13001_1 p
Cargas inducidas en la grúa por la aceleración o deceleración provocados por las fuerzas de los mecanismos
S=Si+p·5·a·m
5: Factor Amplificador
p: Factor para el efecto de los movimientos de posicion secuencial
8

Se tendrán en cuenta los siguientes valores para aceleración durante la elevación y descenso en las operaciones de
arranque y frenada:
Cargas consideradas para el dimensionado.
Cargas debidas a la elevación.
Tal y como se mencionó con anterioridad se considerará que el operario cometerá un error máximo a la hora de elevar
la carga de 0.5 m respecto al punto de reparto equitativo de carga, de modo que:
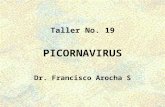
Se observa en la gráfica adjunta como, para un error
superior a 1 m la carga experimentada en un único
gancho, alcanza los 200 kN, siendo 'mh' la carga
máxima de elevación permitida para la estructura de
50 toneladas (500 kN), lo que supone que ese único
gancho experimente un 40% de la carga total,
suponiendo, por tanto, que si ambos pórticos trabajan
simétricamente, el conjunto de ganchos
pertenecientes a esa zona experimentará un 80% del
total de la carga, lo cual se considerará inadmisible.
0 0,5 1 1,5 2 2,5 3 3,5
-200
-100
0
100
200
300
400
500
Error (m)
Qg,
i (k
N)
Aceleración(m/s2) Deceleración (m/s2)Elevación 0,05 0,1Descenso 0,05 0,1
9

Por ello únicamente se admitirá un desvió admisible de 0,5 m, lo cual provocará que el gancho como mucho
experimente un 33% del total de la carga. Para ello se incorporará unos limitadores de carga que evitarán que la
operación de elevación tenga lugar en caso de superarse este umbral.
Se deberá tener en cuenta el aumento de carga que introducirá la eficiencia del polipasto en el cable y, por tanto, en la
estructura empleándose para ello la norma UNE CEN/TS 13001-3-2:2008.
Para el caso del aumento de la fuerza nominal del cable a causa de la eficacia del polipasto se obtiene que, al emplear
cojinetes de rodillos (s=0,985) , con una ventaja mecánica de n m=8 y un nº de poleas fijas entre el tambor y la parte
móvil( nfs=2 ) un rendimiento total definido como:
ηtot=(ηS)
n fs
nm
·1−(ηS)
n m
1−η S
=0,93⇒ f s1=1ηS
=1,07
Por tanto, al considerar el rendimiento del aparejo se obtendrá una carga de diseño en elevación:
f2=mDiseño ·g = f S1 · f S2 ·m H ·g =1,07·500kN =535kN
Se emplearán los coeficientes dados por la normativa:
γ p·ϕ2 ·f2
γP 1,34
1,01
Las cargas actuarán sobre los puntos donde se hallan las poleas y el tambor cuya localización se mostró con
anterioridad.
Puesto que se empleará un sistema de 4 reenvios de poleas se cumplirá:
Qc,i =Q g,i
8; i:1,1',2,2'
ϕ2
10

Se tendrán en cuenta los casos comentados anteriormente en las hipótesis empleando la siguiente nomenclatura:
f2i.j.k
Donde:
• f2i:
Hace alusión a la referencia asignada a la Masa de la carga de elevación según UNE_EN_13001_2
vista desde el gancho o desde el cable que va dirigido al gancho perteneciente a la zona “i” por lo que
'i': g1,g2,c1,c2
• j:
◦ Desc: Se refiere al caso descentrado de carga, suponiendo que se comete un error de 0,5 metros a
la hora de elevar la carga respecto al punto de reparto equitativo de carga.
Se deben distinguir dos casos::
▪ Desc1: Hace referencia al caso donde la carga más desfavorable debida al descentrado se
encuentra en la zona más cercana donde convergen el pilar y el travesaño que une ambos
pórticos.(Zona1)
▪ Desc2: Hace referencia al caso donde la carga más desfavorable debida al descentrado se
encuentra más alejada de la zona donde convergen el pilar y el travesaño o viga de atado que
une ambos pórticos.(Zona2).
◦ Cent: Se refiere al caso de elevar la carga perfectamente centrada y repartida.
Colocación de la carga según la zona:
ZONA 1
0,5 m
11

ZONA 2
CENTRADO
▪ Si se obviase en principio la viga de atado, se observa que los casos Desc1 y Desc2 son
simétricos entre sí por lo que originarían un sistema de carga simétricos en los pórticos,
aunque a la hora de introducir la viga de atado, el pilar perteneciente a la zona 1 experimentará
una mayor carga debida al peso ejercido por ésta, por lo que a partir de ahora, solo se
considerarán los casos Cent y Desc1 que pasará a denominarse de forma genérica como Desc.
0,5 m
12

• k:
◦ A: caso de elevación de la carga desde el agua (v=0º).
◦ B: caso de elevación de la carga desde la marina seca (v=6,3)
Cargas de elevación consideradas.
Si se tienen en cuenta los arranques y frenadas que se presentan durante las maniobras de elevación y descenso de la
carga se obtendrán las siguientes cargas a aplicar:
Desc 236,5 125,5 29,6 15,7
Cent 181,0 181,0 22,6 22,6
Desc 237,9 126,4 29,7 15,8
Cent 182,1 182,1 22,8 22,8
Proyeccion de la carga de los ganchos para el caso elevación desde el muelle
Desc 236,5 26,3 125,6 14,0
Cent 181,0 20,1 181,0 20,1
p·2·f2g1.j.A
(kN)
p·2·f2g2.j.A
(kN)
p·2·f2c1.j.A
(kN)
p·2·f2c2.j.A
(kN)
p·2·f2g1.j.B
(kN)
p·2·f2g2.j.B
(kN)
p·2·f2c1.j.B
(kN)
p·2·f2c2.j.B
(kN)
p·2·f2g1.j.B_Z
(kN)
p·2·f2g1.j.B_Y
(kN)
p·2·f2c1.j.B_Z
(kN)
p·2·f2c2.j.B_Y
(kN)
Se observa que estas cargas en comparación con las debidas al peso propio de la carga son despreciables.
ACELERACIÓN DE LOS MECANISMOS DE ARRASTRE DE ELEVACIÓN.
Elevación Descenso
Aceleración(m/s2) Deceleración (m/s2) Aceleración(m/s2) Deceleración (m/s2)
0,05 0,1 0,05 0,1
0,07 0,14 0,07 0,15
0,09 0,19 0,1 0,2
Factor Amplificador Dinámico: p
· 5·m·a (kN)
Carga Amplificada con coeficiente de seguridad: p
p
· 5·m·a (kN)
13

Efectos inerciales y viento sobre la estructura.
En este apartado se realizará un estudio sobre los efectos ocasionados por el viento o la inercia sobre la estructura
frente a las cargas inducidas por el peso del barco a manipular.
Para las maniobras de traslación se supondrá que la estructura cargada se mueve a velocidad constante y con un
descentrado de carga de 0.5 m.
Para el instante inicial:
Donde:
• 1, 1', 2, 2' : Son los puntos de anclaje donde van colocadas las poleas que están directamente ligadas a los
ganchos de elevación y situadas sobre nuestra grúa.
• G1,G1',G2,G2' : Son los puntos donde se encuentran los ganchos de elevación y donde irán las eslingas.
• La linea G1-G1' representa la eslinga perteneciente a la zona1.
• La linea G2-G2' representa la eslinga perteneciente a la zona2.
• a: representa la distancia entre la eslinga perteneciente a la zona2 y el centro de gravedad de la carga
descentrada 0.5m.
• b: representa la distancia entre la eslinga perteneciente a la zona1 y el centro de gravedad de la carga
descentrada 0.5m.
• d: representa la distancia existente entre el pórtico 1 y el pórtico 2.
l
v=cte
0.5 m
a b
d/2
x
yz
m·g
G1
G1'
G2
G2'
1
1'
2
2'
d/2
14

• l: representa la distancia entre el centro de gravedad de la carga y el punto de anclaje de las poleas que están
directamente ligadas a los ganchos de elevación.
• m: masa del conjunto durante la traslación. Para ello seguiremos las instrucciones de la norma UNE 58132-
2:2005.
Se considerará que el sistema se comporta como un péndulo simple, rígido y que las aceleraciones serán constantes
siguiendo las instrucciones de la norma UNE 58132-2:2005, la cuál se verá con detenimiento en el apartado de
movimiento de traslación de la grúa.
Teniendo en cuenta lo anterior, en el momento que el sistema experimente una aceleración, una deceleración o sople el
viento sobre la carga o estructura, se inducirá una fuerza que, en principio, se denominará de forma genérica F I en una
determinada dirección I, provocando que el sistema tienda a una nueva situación de equilibrio.
El peso del barco junto a F I va a dar lugar a una resultante de modo que, en el equilibrio, va a formar un ángulo
αm=tan−1(
j M
g) desplazando la carga una distancia l·sen(M) en dirección I tal y como se mostrará en la siguiente
figura.
Donde:
• a': a+x 0. Distancia existente entre el centro de masas considerado y los puntos de anclaje 2 y 2',
situados en la grúa en la nueva situación de equilibrio en el eje X.
• b': b+x 0. Distancia existente entre el centro de masas considerado y los puntos de anclaje 1 y 1',
situados en la grúa en la nueva situación de equilibrio en el eje X.
I
Mm·g
FI
R
l·sen(
I
x0=l·sen(
)·sen(
)
x
yzy
0=l·sen(
)·cos(
)
15

Reparto de fuerzas sobre nudos de anclaje.
La nueva posición de equilibrio del centro de gravedad como consecuencia de la actuación de F I sobre la carga y como
se repartirá entre los nudos 1, 1', 2 y 2' de la estructura respecto al plano vertical y horizontal.
Cargas verticales.
Se estudiará el reparto del peso del barco sobre los nodos de anclaje.
∑M 2'' =0⇒ F1'' ,z=a'
a+b·m·g
∑M 1'' =0⇒ F2'' ,z=b'
a+b·m·g
Una vez hallados las cargas en los puntos auxiliares 1'' y 2'' se calcularan las cargas que verán los nudos 1, 1', 2 y 2'.
Para el caso de la eslinga perteneciente a la zona1:
∑M 1'=0⇒ F1,z =d /2− y0
d·F 1'',z
∑M 1=0⇒ F1' ,z=d / 2+ y0
d·F 1'' ,z
x
1''
a' b'
m·g
1''2''
z
F1'',
z
F2'',
z
d/2+y
0
1'1
y
z
F1',zF
1,z
Fz1''
d/2-y
0
16

Para el caso de la eslinga perteneciente a la zona2:
∑M 2'=0⇒ F 2,z=d / 2−y0
d·F 2'',z
Cargas horizontales.
Puesto que la dirección de la fuerza F I vendrá dada por el ángulo I se podrá descomponer en sus componentes X e Y
dadas por:
F I,x =F I ·sen (γ I )
F I,y =F I ·cos (γ I )
Dirección X.
FI,
X
F1',
X
F2',
X
F1,
X
F2,
X
x
1
1'
2
2'
x
y
a'=a+x0
b'=b-x0
d/2+y0
d/2-y0
1''
2''
d/2+y
0
2'2
y
z
F2',zF
2,zF
2'',
z
d/2-y
0
∑M 2=0⇒ F 2',z =d /2+ y0
d·F 2'' ,z
17

Se hallarán las cargas en los puntos auxiliares 1''-2'':
∑M 1'' =0⇒ F2'' ,x=d /2+ y0
d·F I,X
Una vez calculadas las cargas en los puntos auxiliares 1''-2'' se procederá a obtener las cargas de modo que la carga
perteneciente al punto 1'' se repartirá entre los nudos 1 y 2 mientras que la carga del punto 2'' se repartirá entre 1' y 2':
DIRECCION Y.
F1,x=F2,x=F 1'' ,x
2
F1' ,x=F 2',x =F 2'',x
2
2''
1''
FI,X
F2'',x
F1'',x
x
y
d/2-yo
d/2+yo
1
1'
2
2'
x
y
a': a+x0
b':b-x0
d/2+y0
d/2-y0
FI,
Y
F1',
y
F2',
y
F1,
y
F2,
y
1''
2''
∑M 2'' =0⇒ F1'' ,x=d /2− y0
d·F I,X
18

Hallamos las cargas en los puntos auxiliares 1'' y 2'':
Una vez calculadas las cargas en los puntos auxiliares 1'' y 2'' se procederá a obtener las cargas de modo que la carga
perteneciente al punto 1'' se repartirá entre los nudos 1 y 1', es decir, la eslinga perteneciente a la zona1 mientras que la
carga del punto 2'' se repartirá entre 2 y 2', que sostienen a la eslinga perteneciente a la zona 2:
F1,y =F 1' ,y=F 1'' ,y
2
F 2,y=F 2',y =F2'' ,y
2
Carga total repartidas en los nudos de la estructura.
Se particularizará en función del tipo de acción o maniobra que se este tratando obteniendo las cargas en los puntos
donde irían cada gancho, además, deberemos tener en cuenta la tensión inducida en el resto de la estructura en aquellos
puntos de conexión donde el cable se halla anclado en la estructura.
Donde Qg,i hace referencia a la carga que verá el gancho situado en el nudo “i” y Qc,i a la tensión que experimentará
el cable que parte del gancho situado en el nudo “i”.
x
y
a' b'
FI,Y
F1'',y
F2','y
1''2''
∑M 2'' =0⇒ F1'' ,y=a'
a+b·F I,Y
∑M 1'' =0⇒ F2'' ,y=b'
a+b·F I,Y
Qg,i =√(F i,x
2 +F i,y
2 +F i,z
2 ) ,i:1,1', 2,2'
Qc,i =Qg,i
8,i:1,1' ,2,2'
19

Tabla resumen reparto de cargas general sobre nudos de la estructura.
CARGAS
Nudos Auxiliares Nudos Estructura
1'' 2'' 1 1' 2 2'
Fi,z(kN)
Fi,x(kN)
Fi,y(kN)a'
a+b·F I,Y
b'
a+b·F I,Y
a'a+b
·F I,Y
2a'
a+b·F I,Y
2b'
a+b·F I,Y
2b'
a+b·F I,Y
2
Donde:
x0=l·sen (αM ) ·sen (γ I ) y0=l·sen (αM ) ·cos (γ I )
a' =a+ x0 b' =b−x0 m=mtraslacion
F I,X =F I ·sen (γ I ) F I,Y =F I ·cos (γ I )
Durante la maniobra de traslación se considerará una masa total inercial de mtotaldiseño=60000kg al tener que
considerar todos los elementos másicos e inerciales que deberán ir instalados en el travelift.
Partiendo de las aceleraciones medias ( jm ) que suelen caracterizar a este tipo de grúas móviles durante la
maniobra de traslación se despejarán las fuerzas de inercia:
F I=mtotaldiseño ·j m
Al ser estas fuerzas horizontales y aplicadas sobre el centro de suspensión de la carga, para hallar los efectos que
producirían sobre la grúa a través del cable se deberá hallar el ángulo máximo que alcanzaría la carga en la nueva
posición de equilibrio.
Se supondrá que el sistema se comporta como un péndulo simple, rígido y que experimenta aceleraciones constantes,
éstas provocaran que el cable no pueda mantener su posición vertical de modo que la masa suspendida alcanzará una
nueva posición de equilibrio donde:
R
m·g
Fcm
m
m
R=√(m·g )2+(F cm)2
b'
a+b·m·g
d /2−y0
d·F 1'' ,z
d /2+y0
d·F 1'',z
d /2−y0
d·F 2'' ,z
d /2+y0
d·F I,X
2d /2−y0
d·
F I,X
2
d /2+y0
d·F I,X
2
d /2+y0
d·F 2'' ,z
a'a+b
·m·g
d /2−y0
d·
F I,X
2
d /2−y0
d·F I,X
d /2+y0
d·F I,X
αm=arctan ( jm /g ) .
T=R
Siendo R la fuerza resultante debida al peso del barco y la fuerza de inercia Fcm.
20

Conocida la velocidad inicial v0 así como las aceleraciones durante el arranque y la deceleración experimentada en la
frenada se obtiene:
Arranque Frenada
v0(m /s2) 0,5 0,5
jm(m/ s2) 0,15 0,3
αmº 0,86 1,89
ϕ5 1,4 1,4
F cm(kN ) 9 18
ϕ5·F cm(kN ) 12,60 25,20
No obstante, el sistema bajo estudio esta sujeto por cuatro puntos, por lo que se deberá extrapolar los efectos
anteriormente mencionados a los puntos de anclaje de la carga como se indicó para el caso general.
Para ello se considerará que, debido a las aceleraciones o deceleraciones experimentadas durante el arranque o frenada
se producirá un desplazamiento del centro de gravedad paralelamente al plano de los pórticos, por lo que el ángulo
que se denominaba I =90º y FI=5·FCM=25,2 kN para el caso de la frenada, que es el caso más desfavorable.
Al producirse la frenada se pasará de un desvío de valor 0,5 m a un valor de 0,5+l·sen(m ) cargando, en el caso de la
frenada o descargando en el caso de la aceleración, aun más la eslinga de la zona 1 mientras que la eslinga en la zona
2 experimentará el fenómeno opuesto.
Respecto al efecto horizontal solo obtendremos efecto en dirección X por lo que F I,X =FI =25,2 kN para el caso de
frenada como se indicó con anterioridad y repartiéndose como se indicó en el apartado general.
Caso frenada en llano.
vo(m /s2) 0,5
jm(m/ s2) 0,3
αmº 1,89
l (m) 4,5
l·sen (αm) (m) 0,14
a´ =a+l·sen (αm) 2,28
b´ =b−l·sen (αm) 0,98
Efectos Verticales sobre la estructura.
F1,z =F 1' ,z (kN ) -215,1
F 2,z=F 2',z (kN ) -84,9
21

Efectos Horizontales sobre la estructura.
ϕ5 1,4
F cm(kN ) 18
ϕ5 ·F cm(kN ) 25,2
F1,x=F1',x =F2,x=F2' ,x6,3
De este modo se demuestra que los efectos horizontales debido a la inercia pueden considerarse despreciables frente a
los efectos verticales y, además, podemos ver que la eslinga perteneciente a la zona1 va a cargar bastante, más incluso
que durante la elevación de la carga donde este valor resultaba ser de 163,3 kN
Bastará con hallar la resultante debida a la acción de los efectos verticales y horizontales para repartirlos entre el
número de cables que emplearemos en los reenvios.
De este modo:
Qgancho,i =√F i,z2+F i,x
2⇒Q c ,i=Q gancho,i
8; i:1,1',2,2'
Efectos sobre elementos de elevación.
Q gancho,1=Qgancho,1' (kN ) 215,2
Q gancho,2=Qgancho,2' (kN ) 85,2
Qc,1=Q c,1' (kN ) 26,9
Qc,2=Q c,2' (kN ) 10,64
22

Fuerzas durante la frenada durante la maniobra de movimiento en diagonal.
La maniobra de movimiento en diagonal posibilita un desplazamiento de gran utilidad ya que dotará a la grúa de una
mayor maniobrabilidad a la hora de mover la carga en el embarcadero.
Puesto que las deceleraciones experimentadas por la frenada van a ser superadas por las aceleraciones durante el
arranque se realizará el estudio de la frenada durante esta maniobra.
DATOS CONSIDERADOS DURANTE LA MANIOBRA.
m(kg ) 60000
vo(m /s2) 0,5
j m(m/ s2) 0,3
F cm(kN ) 18
ϕ5 1,4
F I (kN )=ϕ5 ·F cm25,2
αm 2,4
l (m) 4,5
a (m) 2,13
b (m) 1,13
d (m) 6
x0 (m) 0,1
y0 (m) 0,1
Efectos Verticales sobre la estructura.
F1,z (kN ) -199,3
F1' ,z (kN ) -219,8
F 2,z (kN ) -86
F 2',z (kN ) -94,9
Efectos Horizontales sobre la estructura.
Dirección X Dirección Y
F1, j(kN ) 4,7 6,8
F1' ,j (kN ) 5,1 6,8
F 2,j (kN ) 4,7 3
F 2',j (kN ) 5,1 3
Efectos sobre elementos de elevación.
1 1' 2 2'
Qgancho,i(kN) 199,4 219,9 86,2 95,1
Qc,i(kN) 24,93 27,49 10,78 11,89
23

Fuerzas durante la frenada descendiendo la pendiente.
Al igual que para los casos anteriores el caso de frenada en pendiente, ya que al ser la deceleración originada por ésta
superior a la aceleración debida al arranque en subida de pendiente, supondrá un caso más desfavorable y, además,se
supondrá que el operario, al considerar que la pendiente es pequeña, no liberará el cable necesario para que el barco
quede paralelo al suelo.
Como en el resto de los casos, se partirá de una velocidad de marcha constante de 0,5 m/s y, al producirse la frenada se
experimentará una deceleración media jm=−0,33m / s2 de modo que la fuerza de inercia hará que el barco
tienda a seguir la marcha, provocando un efecto pendular sobre la estructura de la grúa alcanzando un nuevo estado de
equilibrio tal como se explicó con anterioridad.
Si se proyecta el peso sobre unos ejes x' y z' paralelos a la geometría de la grúa se podrá particularizar el caso general
de reparto de cargas sobre los nudos estudiados anteriormente, considerando I =90º:
DATOS CONSIDERADOS DURANTE LA MANIOBRA.
m(kg ) 60000
vo(m /s2) 0,5
j m(m/ s2) 0,3
β(%) 5
β(º) 2,86
m·g·cos (β) -559,3
F cm(kN ) 18,48
1,4
F I ( kN )=ϕ5· (Fcm+m·g·sen(β)) 65,02
αm 1,89
l (m) 4,5
a (m) 2,13
b (m) 1,13
d (m) 6
x0=l·sen (β+αm) (m) 0,15
y0 (m) 0
a' =a+ x02,28
b' =b−l·sen (β+αm) 0,98
Efectos Verticales sobre la estructura.
F1,z (kN ) -235,5
ϕ5
24

F1' ,z (kN ) -235,5
F 2,z (kN ) -64,1
F 2',z (kN ) -64,1
Efectos Horizontales sobre la estructura.
Dirección X Dirección Y
F1, j(kN ) 6,9 -
F1' ,j (kN ) 6,9 -
F 2,j (kN ) 6,9 -
F 2',j (kN ) 6,9 -
Comparativa de frenada entre las maniobras estudiadas y carga de diseño.
Tras el estudio de las maniobras que podrán ser llevadas a cabo por el travelift se procederá a realizar una comparativa
de los efectos verticales derivados durante las mismas frente a las cargas de diseño.
Se despreciarán los efectos horizontales en comparación con los efectos verticales que se producen en la dirección del
eje de la marcha tal y como pudo verse en el apartado anterior.
Para el dimensionado de la estructura se emplearán las cargas derivadas durante la elevación de la carga teniendo en
cuenta los coeficientes amplificadores presentados anteriormente:
Efecto sobre los elementos de elevación.Resultados en elementos.
Qgancho,i(kN) 235,6 235,6 64,5 64,5Qc,i(kN) 29,45 29,45 8,06 8,06
CARGAS DE DISEÑO
Desc 236,5 125,5 29,6 15,7
Cent 181,0 181,0 22,6 22,6
Desc 237,9 126,4 29,7 15,8
Cent 182,1 182,1 22,8 22,8
Proyeccion de la carga de los ganchos para el caso elevación desde el muelle
Desc 236,5 26,3 125,6 14,0
Cent 181,0 20,1 181,0 20,1
p·2·f2g1.j.A
(kN)
p·2·f2g2.j.A
(kN)
p·2·f2c1.j.A
(kN)
p·2·f2c2.j.A
(kN)
p·2·f2g1.j.B
(kN)
p·2·f2g2.j.B
(kN)
p·2·f2c1.j.B
(kN)
p·2·f2c2.j.B
(kN)
p·2·f2g1.j.B_Z
(kN)
p·2·f2g1.j.B_Y
(kN)
p·2·f2c1.j.B_Z
(kN)
p·2·f2c2.j.B_Y
(kN)
25

Efectos ocasionados por las cargas verticales.
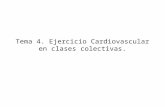
Conclusiones sobre la comparativa de maniobras.
De los resultados obtenidos se puede observar como la maniobra de descenso de pendiente durante la frenada en el
caso descentrado de carga induce la carga más desfavorable frente a las otras maniobras: 235,5 kN , siendo muy
próxima a la carga de diseño pero sin llegar a rebasarla. No obstante, para la misma maniobra con la carga centrada
superará a la carga de diseño en este caso por lo que, por seguridad, cuando se lleve a cabo esta maniobra se deberá
tomar las precauciones pertinentes llevando a cabo un anclaje de la carga para evitar la oscilación pendular que pueda
producirse.
11'22'
215,1215,1
84,984,9
199,3
219,8
86,094,9
235,5235,5
64,164,1
236,5236,5
125,5125,5
Caso Descentrado
Llano
Diagonal
Pendiente(5%)
Diseño
Fz
(kN
)
11'22'
169,1169,1
130,9130,9
155,5
171,5
129,8143,2
189,5189,5
110,1110,1
181,02181,02181,02181,02
Caso Centrado
Fz(
kN)
Llano
Diagonal
Pendiente(5%)
Diseño
26

Resultados estructurales.
Se adjuntará, a continuación, un resumen de los resultados obtenidos en el cálculo de las secciones a implementar:
• Estados Límite Últimos
◦ Resistencia
◦ Estabilidad.
• Estados Límite de Servicio:
◦ Flechas Máximas.
◦ Desplazamientos máximos en los nudos.
El resto de resultados se adjuntará en un anexo específico donde vendrán acompañados de los cálculos necesarios para
la obtención y comprobación frente a estados límite de la estructura frente a las cargas de diseño consideradas,
teniendo en cuenta que ambos pórticos trabajarán simétricamente y, por tanto se verán sometidos a campos de
esfuerzos simétricos.
En las siguientes figuras se mostrará el convenio de signos a seguir para los esfuerzos positivos:
• N: Axil.
• Vy: Cortante Y.
• Vz: Cortante Z
• Mt: Momento torsor.
• My: Momento flector Y.
• Mz: Momento flector Z.
Comprobación Estados Límite Últimos.
Resistencia.
Barra
Esfuerzos pésimos
N3/N5 11,15 3,000 -19,859 0,000 0,000 0.00 -37,650 6,200
N6/N5 44,54 6,500 -241,15313,843 1,814 4,710 -9,490 -101,800
N7/N5 59,47 4,875 -43,582 5,017 -0,493 -10,380 283,380 -7,790
N8/N7 43,34 6,500 -207,906-13,840-2,389 6,590 12,730 99,450
N8/N6 37,51 4,049 0 -1,545 6,429 -2,290 -36,490 0,920
Posición
(m)N
(kN)Vy
(kN)Vz
(kN)Mt
(kN·m)My
(kN·m)Mz
(kN·m)
Notación:
N: Esfuerzo axil (kN)
Mt: Momento torsor (kN·m)
My: Momento flector en el plano 'XZ' (giro de la sección respecto al eje local 'Y' de la barra). (kN·m)
Mz: Momento flector en el plano 'XY' (giro de la sección respecto al eje local 'Z' de la barra). (kN·m)
Vy: Esfuerzo cortante según el eje local Y de la barra. (kN)
Vz: Esfuerzo cortante según el eje local Z de la barra. (kN)
Los esfuerzos indicados son los correspondientes a la combinación pésima, es decir, aquella que demanda la máxima resistencia de la sección.
: Aprovechamiento de la resistencia. La barra cumple con las condiciones de resistencia de la norma si se cumple que 100 %.
27

Comprobación Estados Límite Últimos.
Estabilidad.
Barras λ
λw
Nt
Nc
MY
MZ
VZ
VY
MYVZ MZVY NMYMZ
NMYMZVY
VZ
Mt
MtV
ZM
tV
Y Estado
N3/N5 < 2.0Cumple
≤ λw,máx
Cumple
NEd =
0.00
N.P.(1)
η =0,7 η= 9,2x: 3.0
mη = 2.0
VEd =
0.00
N.P.(2)
x: 0 mη = 0.3 N.P.(3) x: 0 m
η < 0.1x: 3 mη = 11.2
x: 0 mη < 0.1
MEd =
0.00
N.P.(4)N.P.(5) N.P.(5) CUMPLE
η = 11.2
N6/N5 < 2.0Cumple
≤ λw,máx
Cumple
NEd =
0.00
N.P.(1)
x: 0 mη =8,8
x: 6.5 mη = 2.7
x: 6.5mη =33.4
η = 0.2 η = 1.6 η < 0.1 η < 0.1x: 6.5 mη = 44.5
η < 0.1 η = 1.6 η = 0.1 η = 1.3CUMPLEη = 44.5
N7/N5 < 2.0Cumple
≤ λw,máx
Cumple
NEd =
0.00
N.P.(1)
x:4.051
mη =1,4
x: 4.874m
η = 56.0
x: 6.5m
η =11.2
x: 6.499m
η = 17.6
x:4.876
mη = 1.7
η < 0.1 η < 0.1x: 4.875
mη = 59.5
η < 0.1 η =2.7x: 6.499
mη = 14.7
x:4.876m
η = 1.4
CUMPLEη = 59.5
N8/N7 < 2.0Cumple
≤ λw,máx
Cumple
NEd =
0.00
N.P.(1)
x: 0 mη =7,6
x: 6.5 mη = 3.1
x: 6.5mη =32.6
η = 0.2 η = 1.6 η < 0.1 η < 0.1x: 6.5 mη = 43.3
η < 0.1 η = 1.8 η =0.1 η = 1.3CUMPLEη = 43.3
N8/N6 N.P.(6)≤ λw,máx
Cumple
NEd =
0.00
N.P.(1)
NEd =
0.00
N.P.(7)
x: 4.049m
η = 37.5
x: 0 m
=7η .7
x: 4.051m
η = 4.2
η =0.5 η < 0.1x: 0 mη < 0.1
x: 4.049m
η = 22.1
η < 0.1 η = 2.5x: 4.051
mη = 3.3
η =0.3CUMPLEη = 37.5
Notación:
: Limitación de esbeltez
w: Abolladura del alma inducida por el ala comprimida
Nt: Resistencia a tracción
Nc: Resistencia a compresión
My: Resistencia a flexión eje Y
Mz: Resistencia a flexión eje Z
Vz: Resistencia a corte Z
Vy: Resistencia a corte Y
MyVz: Resistencia a momento flector Y y fuerza cortante Z combinados
MzVy: Resistencia a momento flector Z y fuerza cortante Y combinados
NMyMz: Resistencia a flexión y axil combinados
NMyMzVyVz: Resistencia a flexión, axil y cortante combinados
Mt: Resistencia a torsión
MtVz: Resistencia a cortante Z y momento torsor combinados
MtVy: Resistencia a cortante Y y momento torsor combinados
x: Distancia al origen de la barra
: Coeficiente de aprovechamiento (%)
N.P.: No procede
Comprobaciones que no proceden (N.P.):
(1) La comprobación no procede, ya que no hay axil de tracción.
(2) La comprobación no procede, ya que no hay esfuerzo cortante.
(3) No hay interacción entre momento flector y esfuerzo cortante para ninguna combinación. Por lo tanto, la comprobación no procede.
(4) La comprobación no procede, ya que no hay momento torsor.
(5) No hay interacción entre momento torsor y esfuerzo cortante para ninguna combinación. Por lo tanto, la comprobación no procede.
(6) La comprobación no procede, ya que no hay axil de compresión ni de tracción.
(7) La comprobación no procede, ya que no hay axil de compresión.
28

Estados Límite de Servicio.
Flechas Máximas Admisibles
Se considerará una flecha máxima para todos los elementos de L/500:
Definiciones:
Pos.: Valor de la coordenada sobre el eje 'X' local del grupo de flecha en el punto donde seproduce el valor pésimo de la flecha.L.: Distancia entre dos puntos de corte consecutivos de la deformada con la recta que unelos nudos extremos del grupo de flecha.
Flechas
Barras
Flecha máximaabsoluta xy
Flecha máximaabsoluta xz
Flecha activaabsoluta xy
Flecha activaabsoluta xz
L/500 (mm) Estado
Pos.(m)
Flecha(mm)
Pos.(m)
Flecha(mm)
Pos.(m)
Flecha(mm)
Pos.(m)
Flecha(mm)
N3/N5 3,000 0,56 3,000 2,40 3,000 0,37 3,000 2,39 12CUMPLE
η (%)= 20,01
N6/N5 3,656 6,68 4,063 0,34 3,656 6,92 4,063 0,26 13CUMPLEη (%)=51,37
N7/N5 4,876 0,41 3,575 11,75 4,877 0,40 3,575 11,67 13CUMPLE
(%)η = 90,36
N8/N7 3,656 6,41 4,063 0,39 3,656 6,64 4,063 0,41 13CUMPLE
(%)η = 49,29
N8/N6 1,625 0,64 3,250 6,91 1,625 0,63 3,250 8,38 13CUMPLE
(%)η = 53,15
Desplazamientos Máximo en nudos.
Se considerarán desplazamientos admisibles aquello desplazamientos menores a 15 mm en los nudos.
Los que se mostrarán a continuación corresponden a los más desfavorables obtenidos en el total de hipótesisrealizadas:
Nomenclatura:
Di: Desplazamientos en ejes locales de las barras.
Gi: Giros en ejes locales de las barras.
Siendo i:X,Y,Z
Desplazamientos Máximos
NUDOS Dx(mm) Dy(mm) Dz(mm) Gx(mRad) Gy(mRad) Gz(mRad) ESTADO
N5 -1,070 -0,020 -0,530 0,312 -5,322 1,601 CUMPLE
N6 0,000 0,000 0,000 -0,081 2,758 0,530 CUMPLE
N7 -1,011 -14,785 -0,457 1,923 4,99 2,154 CUMPLE
N8 0,000 0,000 0,000 2,379 -2,747 0,885 CUMPLE
Conclusiones
Tras el análisis de las comprobaciones de los estados límite se puede concluir que la comprobación más restrictiva es
la referente a la comprobación de los estados límite de servicio tal y como cabría esperar.
Los desplazamientos que experimentan los elementos de la estructura dada la tipología de la misma pueden llevar a la
estructura a un estado inestable aún sin alcanzar tensiones críticas para la misma suponiendo un gran riesgo.
29

4.1.a) Calculo del rodamiento colocado en la viga de atado.
Unas vez se obtienen los esfuerzos debidos a las solicitaciones de carga de diseño se extraerán los esfuerzos a los quese verá sometido el rodamiento a instalar colocado en la viga de atado situado en el nodo N3 ( x= 0 m).
Para el dimensionado se seguirán las recomendaciones dadas en el catálogo de la empresa ROTHE ERDE que seadjunta con este proyecto, teniendo en cuenta para el cálculo que el criterio de diseño se basará en el criterio de cargaestática en lugar de en el criterio de fatiga dada las solicitaciones a las que este rodamiento se verá sometido.
Solicitaciones
Fa(kN) 38,7 Fuerza axial a la que se somete el rodamiento.
0 Excentricidad de la fuerza aplicada Fa
2,2 Fuerza axial a la que se somete el rodamiento.
0,25
55,01
a(m)
Fr(kN)
r(m) Excentricidad de la fuerza aplicada Fr
Mk (kN·m) Momento flector exterior sobre el rodamiento.
Dada las solicitaciones anteriores se calcularán los parámetros
Fa' y Mk' según el tipo de serie dada en el catálogo obteniendo
para el caso de fstat =1 (Grúa de puerto)
Se consultarán las gráficas dadas en el catalogo y se determina el tipo de rodamiento que verifica.
Para las solicitaciones consideradas se instalará un rodamiento de 4 puntos de contacto de la serie060.22.0575.502.11.1503
Fa
FaaM
k
Frr
KD600Fa'(kN): 53
Mk'(kN·m): 67
30

4.2 Elementos de izado.
Para llevar a cabo el dimensionado de los elementos de izado nos basaremos el las recomendaciones del F.E.M 1001
así como a otra serie de recomendaciones y normativas que se presentarán cuando sean necesarias.
4.2.a) Cable
Se considera la clasificación del mecanismo y su clase de utilización según UNE 58-112-91. según las solicitaciones a
las que se considerarán será sometida la grúa:
Clase de utilización de los aparatos
Clase de UtilizaciónNúmero máximos de ciclos de
maniobraObservaciones
U5 5x105 Utilización regular en serviciointermitente
Coeficiente nominal del espectro de carga para los aparatos, Kp
Estado de cargaCoeficiente nominal del espectro de
las cargasKp
Observaciones
Q3-Pesado 0,5
Aparato que levanta con bastantefrecuencia la carga máxima de
servicio y corrientemente cargasmedianas
Grupos de clasificación del aparato completo
Estado de cargaCoeficiente nominal del espectro de
las cargasKp
Clases de utilización y númeromáximo de ciclos de maniobra del
aparato
U5
Q3-Pesado 0,5 A6
Clases de utilización de los mecanismos
Clase de UtilizaciónDuración total de servicio
hObservaciones
T5 6300Utilización regular en servicio
intermitente
Coeficientes nominales del espectro de cargas para los mecanismos, Km
Estado de cargaCoeficiente nominal del espectro de
cargasKm
Observaciones
L3-Pesado 0,5
Mecanismo sometido con bastantefrecuencia a su carga máxima de
servicio y corrientemente a cargasmedias
Grupos de clasificación de mecanismos completos
Estado de cargaCoeficiente nominal del espectro en
cargasKm
Clases de utilización del mecanismo
T5
L3-Pesado 0,5 M6
31

Para este grupo de clasificación (M6) y el empleo de cables convencionales se le asociará un coeficiente de seguridad
mínimo Zp=5,6
La tracción máxima “S” en el cable de elevación se obtendrá como:
S=P+Q
i· η ·cos α=16,8kN
Siendo :
P: Carga máxima nominal del aparato= 500 kN entre 4 ganchos: 125 kN
Q: Peso propio del aparejo o elemento de suspensión de la carga.
i: Relación del aparejo=8.
η: Rendimiento del aparejo:(8 ramales):0,93
αm: 6.3º en el caso más desfavorable considerado< 22.5º por lo que no se tiene en cuenta.
La fuerza mínima de rotura del cable deberá verificar:
S
Zp≤Fmin
RoturaCable
F minRoturaCable≥
16,8kN
5,6=96,38kN
Se escogerá un cable tipo 6x36 WS de 12 mm de diámetro con alma de acero independiente, calidad 1960 cuya fuerza
mínima de rotura es de 100 kN.
32

4.2.b) Poleas y aparejo de elevación.
Para el dimensionado de las poleas se considerará:
DPolea≥d1 ·h 1 ·h 2
Donde:
Diámetro del cable d1 12
Coeficiente dependiente del grupo en el que
esta clasificado el mecanismo de elevación
tipo M6,Cable normal
h1 22,4
Coeficiente de mayoración. Compensa el
número de flexiones de un cable en su paso
por las poleas y el tambor.
Número de flexiones del cable>10
h2 1,25
Diámetro de las poleas DPoleas 336
Aparejo de elevación
Se emplearán como aparejos de elevación los aparejos de carro abierto de 4 poleas del catálogo de la empresa GOSAN
Conocido el diámetro del cable (12 mm) y el la clasificación del
mecanismo (M6) se escogerá el siguiente modelo:
Aparejo
Grupo M5
Nº Reenvios 4
Referencia 041.12.M5
Grupo M5
Carga Máx (t) 20
DCable Máx admisible(mm)
14
Peso(kg) 305
33

4.2.c) Tambor de izado.
Se diseñará acorde las normativas UNE_EN_14492-1=2007+A1:2010, UNE_EN_13135 y UNE_58513=1987
teniendo en cuenta que la profundidad del embarcadero es de 6 m por lo que dado el número de reenvios de poleas y
las distancias a salvar serán necesarios 112 m aproximadamente por cada gancho a montar por lo que se recurrirá a
emplear tambores de doble ranurado que permitirán un mayor sincronismo a la hora de manipular la carga.
Las dimensiones principales del tambor de izado vienen determinadas sobre todo por el diámetro del cable que se
empleará así como por los ángulos de deflexión que experimentará el cable al llegar a los diferentes elementos de
elevación:
Dimensionado de las acanaladuras
Radio de garganta'r' 0,54·dcable 6,48 mm
Profundidad'g' 0,365·dcable 4,38 mm
Paso'p' 1,2·dcable 14,4mm
dcable 12 mm
Selección ángulo α:
paso
π·Denrollamiento
α
α=tan−1(
pasoπ·D enrollamiento
)=0,76º ⇒α= 1º
Denrollamiento≈28·d cable
34

Selección ángulos de deflexión:
Calculo de dimensiones del tambor de izado
Siendo:
Lenrollamientomax
:Longitud máxima del tambor para que se verifiquen las condiciones de los ángulos de deflexión
nmax : Número de vueltas máximas de cable sobre el tambor. Se ha de dejar dos vueltas más por seguridad.
nutiles:Número de vueltas útiles de cable sobre el tambor, sin tener en cuenta las dos vueltas de seguridad.
Denrollamiento : Diámetro efectivo del tambor
Se comprueba que para las dimensiones del tambor asignadas se cumple la condición de ofrecer los 115 m de cable
requerido para poder salvar la profundidad del embarcadero así como los reenvios de poleas y colocación en la
estructura:
Conocido el Denrollamiento se determinará el diámetro del flanco y el tamaño total del tambor teniendo en cuenta las dos
vueltas de seguridad así como una separación del flanco respecto a la última vuelta de cable de 0,5·paso:
Se considerará un tambor de doble ranurado que permitirá un mejor sincronismo a la hora de manipular la carga por
tanto la longitud real del tambor de doble ranurado será de 1700 mm
βL+α≤4º; βL≤4º
βR−α≤ 4º; βR≤4º
α=1º
βL=min(βL≤4º−1º=3º; βL≤4º )=3º
βR=min(βR≤4º+1º=5º; βR≤4º )=4º
Lenrollamientomax =6,5·1000·tan (3º)+tan (4º)=795mm
Lenrollamiento
max=(nmax−1)·p ⇒nutiles=57
nmax=nutiles+2=59
nutiles·π·D enrollamiento≥LCable
Deseada⇒ Denrollamiento=632mm
nutiles ·π·D enrollamiento≥LcableDeseado
57· π·632 /1000=113≥112⇒Verifica
D flanco=Denrollamiento+d cable+2·h2 =680mm
h2=1,5·d cable=18mm
Ltambor
Total =(nutiles−1) ·p +2·p +2·p
2=826mm
35

4.2.d) Selección del motoreductor empleado para el mecanismo de elevación.
Para llevar a cabo la selección del motoreductor se realizarán las siguientes consideraciones:
Se definirá como QDiseño a la carga que verá un gancho al experimentar el descentrado de carga debido al error del
operario como ya se definió anteriormente por lo que se tratará de una carga mayorada
Para la obtención de vRecogidaCable se supondrá que no existe deslizamiento entre el cable y el tambor y se deberá tener
en cuenta el nº de ramales puesto que si el gancho recorre una cierta distancia en una cantidad de tiempo el cable
deberá de poder suministrar esa misma distancia pero multiplicada por el nº de ramales para ese mismo periodo de
iempo luego:
v RecogidaCable=NºRamales·v Elevación
Conocida la v RecogidaCable y el diámetro del tambor DEnrollamiento :
wTambor=v RecogidaCable
DEnrollamiento/2
Maniobra de elevación
Carga a elevar (kN) 500
0,05
175,00
8
21,88
0,4
Datos relativos al tambor
632
1,27
12,09
Velevación
(m/s)
QDiseño
(kN)
Nº Ramales
QcableDiseño
(kN)
vRecogidaCable
(m/s)
DEnrollamiento
(mm)
wTambor
(rad/s)
wTambor
(rpm)
36

Para la selección del motoreductor se deberá de verificar :
1. Verificación de Par:
M Motoreductor (kN·m )≥M Resistente
ηmecánico=15,02
Siendo:
M Resistente (kN·m )=2·Q cableDiseño(kN ) ·
DEnrollamiento
2(m)=13,82
Conocido el par resistente se seleccionará aquel motoreductor que sea capaz de proporcionarlo con cierto margen.
Se escogerá el motoreductor de la empresa Tecnotrans, seríe WinchDrives 810F2:
M Requerido
(kN·m )M Motoreductor
Seleccionado
(kN·m )¿M Motoreductor
Seleccionado≥M Resistente(kN·m )?
15,02 17,5 Cumple
2. Velocidad de giro del motoreductor a la entrada menor a 1500 r.p.m:
Se seleccionará la relación de reducción que permita obtener wTambor sin que se supere una velocidad de giro a la
entrada del motoreductor de 1500 r.p.m. ofrecida por el motoreductor:
wTambor
(r.p.m)
RelaciónReducciónwTambor
wMotoreductor
Entrada
wMotoreductorEntrada
(r.p.m)¿w Motoreductor
Entrada <1500r.p.m?
12,091
21253,8 Cumple
37

Cálculo del equipo hidráulico requerido para la maniobra de elevación.
La potencia ofrecida por el motoreductor debe ser capaz de superar la potencia consumida durante la maniobra de
elevación para las condiciones de giro del tambor y par resistente ofrecido por la carga además de vencer las pérdidas
hidráulicas y por rozamiento que se producen:
˙W MotoreductorMax (kW )≥
˙W ElevRequerida
ηhidráulico=21,20
Siendo:
˙W ElevRequerida (kW )=
M Resistente(kN·m )·w Tambor (rad /s )ηmecánico
=19,07
Rendimientos
ηmécanico=0,92;
ηhidráulico=0,90
Se empleará una presión de 300 bares (30 Mpa) típica en este tipo de máquinas por lo que conocidas la presión y la
potencia necesaria en el motoreductor se podrá obtener el caudal y las bombas hidráulicas a instalar despejando de la
siguiente ecuación:
˙W Motoreductor (kW )=P (MPa) ·Q (l /min)
60
Para el caso de la maniobra de elevación se requerirá un caudal:
QMotoreductor(l
min)=42,39
38

4.3. Elementos necesarios para la traslación.
4.3.a) Neumáticos.
Se supondrá el comportamiento simétrico de las reacciones respecto a ambos pórticos.
Envolvente de las reacciones en los nudos
Nudo DescripciónRx
(kN)Ry
(kN)Rz
(kN)Mx
(kN·m)My
(kN·m)Mz
(kN·m)
N6Valor mínimo de la envolvente -8,76 -7,23 16,77 - - -
Valor máximo de la envolvente -1,61 -0,17 172,55 - - -
N8Valor mínimo de la envolvente 1,61 -0,01 14,97 - - -
Valor máximo de la envolvente 8,76 8,68 150,07 - - -
Las reacciones calculadas serán los esfuerzos que deberán soportar los neumáticos siendo las reacciones verticales
(Rz) las dominantes y las empleadas en la selección de los mismos.
Dada las elevadas cargas a las que se verán sometidos los neumáticos se emplearán neumáticos destinados a aviación
como los de la serie goodyear que se adjuntan con este proyecto.
Se seleccionará el modelo radial 40x15,5 - 16 con las siguientes características:
Condiciones de servicio
Nomenclatura
Construcción Condiciones de servicio
Peso (kg)
PlyRating
TT o TLVelocidad nominal
(km/h)
Carganominal
(kN)
Presiónnominal
(bar)
Carga máxima defrenada
(kN)
40,5x15,5-16 28 TL 378 179 13,4 233 70,3
Siendo:Play Rating: Índice de resistencia del neumático. No tiene por que coincidir con el número
de capas internas de resistencia del mismo.
TT o TL: Hace referencia a si el neumático monta cámara de aire ( TT ) o si
no la monta (TL)
Velocidad nominal: velocidad que es capaz de soportar el neumático para la carga nominal a
la presión nominal dada.
Carga nominal: carga que puede soportar el neumático para la presión nominal dada.
Presión nominal: presión necesaria para que el neumático pueda soportar las condiciones de carga y velocidad nominal.
39

Características geométricas del neumático.
Siendo:
Do: Diámetro exterior del neumático.
W: Ancho de la sección.
A: Ancho entre pestañas.
D: Diámetro de la llanta.
DF: Altura de la pestaña de la llanta.
Max Max A D
1016 991,87 393,7 374,65 408,94 284,48 408,94 254 406,4 31,75 81,28
Do (mm) W (mm) Talon (S) (mm)Radio en carga estática (mm)
Llanta (mm)
Min Min Dsmax Wsmax DF Espesor min
40

4.3.b) Motor de rueda.
El par motor ejercido por el motor hidráulico instalado en la rueda deberá de vencer el rozamiento al que se haya
sometido durante la maniobra de elevación para superar una pendiente del 5% además de vencer las pérdidas
ocasionadas por el sistema.
Se considerará los siguientes parámetros:
Maniobra de traslación. Subida pendiente 5%
Carga total Traslación (kN) 600
Vtraslación (m/s) 0,5
Crr 0,05
Restatico (mm) 408,94
wrueda (rad/s) 1,22
Pendiente (º) 2,86
Para hallar los resultados se procederá de la siguiente forma de modo que el peso del barco se descompondrá en sus
componentes paralelas a la pendiente a vencer:
∑ F z=0;N 1+N 2=W·cos (β)
∑ F x=0;F r1+F r2+W·sen (β)=F tracciónTotal
F r1=Crr·N 1
F r2=Crr·N 2
De las ecuaciones anteriores se deduce:
∑ F x=0;F tracciónTotal
=Crr· (W·cos (β))+W·sen (β)
β=5%F r1
Fr2
N2
N1
W W·cos (β)
W·sen(β)
41

Se supondrá un reparto equitativo de la tracción entre las cuatro ruedas:
FTracciónRueda (kN )=
F TracciónTotal
4
M TracciónRueda (kN·m )=FTracción
Rueda·R Estático
wRueda(rad /s )=vTraslación /REstático
Resultados.
FTracciónTotalManiobra (kN ) 60
FTracciónRueda (kN ) 15
M TracciónRueda (kN·m ) 6,12
ηméc 0,92
M TracciónRuedaRequerido(kN·m ) 6,65
˙W TracciónRuedaRequerido(kW ) 8,12
ηhid 0,9
˙W TracciónRuedaRequerida(kW ) 8,3
Se escogerá el rueda de la serie TecnoTrans WheelDrive 605 con indice de reducción de 1
22
Se realizarán las comprobaciones pertinentes:
1. Verificación del Par.
M TracciónRuedaRequerido(kN·m ) M Motoreductor
Max (kN·m ) ¿M MotoreductorMax (kN·m )>M tracción
Rueda?
6,65 7,00 Cumple
2. Velocidad de giro del motoreductor a la entrada menor a 1500 r.p.m.
Relación dereducción
wtracciónRueda
(r.p.m)wMotoreductor
Entrada
(r.p.m)¿w Motoreductor
Entrada <1500r.p.m?
1
2211,65 256,00 Cumple
M Motoreductor (kN·m )≥M ResistenteTraccion
Rueda
ηmecánico=
6,120,92
=6,65
42

Equipo hidráulico requerido para la maniobra de tracción.
Se procederá de igual forma que para el caso del cálculo del equipo hidráulico requerido para la maniobra de
elevación:
˙W TracciónRuedaRequerida(kW ) 8,11
ηhid 0,90
˙W HidraulicaRuedaRequerida(kW ) 9,02
Q(l/min) 18,04
4.3.c) Motor para la dirección.
Se deberá obtener la huella que deja el neumático para poder obtener el par a aplicar en la dirección:
• Se considerará que los neumáticos producen una huella circular:
Se parte de la hipótesis de que el neumático va a provocar una huella elíptica:
Siendo :
Fz(kN): 137,50.Reacción vertical en el neumático.Se considerará el caso descentrado de carga.
P( bar):13,40. Presión nominal en el neumático.
2·b(mm):400,00.Ancho del neumático.
Puesto que 'a' es de magnitud aproximada a 'b' se podrá suponer que
la huella obtenida es de tipo circular y cuyo diámetro coincidirá con el ancho del neumático.
• Se calculará el par resistente que deberán vencer los motoreductores empleados para las direcciones:
Siendo:
μ: 1 Coeficiente de rozamiento considerado.
R(m): 0,2 Radio de la huella del neumático.
M r(θ)=∫0
R
∫0
2·π
µ·P·r·dA =∫0
R
∫0
2·π
µ ·P·r·r·d θ·dr =2· π·µ·P·R
3
3=21464N·m
2·b
2·aÁrea Elipse=
F z
P=π·a·b
a=F z
(P· π·b )=0,163m
43
2·b

• Se supondrá que cada rueda tardará un minuto en llevar a cabo la maniobra de giro completo:
wdirecciónRueda (r.p.m)=1
• Se calculará las condiciones existentes en el eje de dirección de la rueda a la hora de realizar la maniobra de
dirección correspondiente:
Condiciones en el eje de dirección
M DirecciónRueda (kN·m ) 21,5
wDirecciónRueda (r.p.m) 1
˙W Dirección
Rueda (kW ) 2,6
• Dado el alto par que se deberá vencer para efectuar la maniobra de dirección, se empleará un conjunto piñón
corona que permitirá realizar la maniobra.
Selección del par piñón corona para la selección del motor de la dirección.
• Se considerará que el rodamiento empleado en la dirección no absorberá momentos flectores debido a la
alineación del mismo con el eje de la columna del pórtico:
• Dada la sección de las columnas del pórtico 400x300x8 el diámetro mínimo del rodamiento se supondrá de 500mm.
• Para que los dientes del engranaje que componen el juego piñón corona puedan trasmitir la carga entre ellos se considerará un módulo de 6 con un número de dientes del piñon Zp=18.
Solicitaciones
Fa(kN) 137,5 Fuerza axial a la que se somete el rodamiento.
Fr(kN) 0 Fuerza axial a la que se somete el rodamiento.
Mk (kN·m) 0 Momento flector exterior sobre el rodamiento.
44

Para las consideraciones anteriormente realizadas se escogerá el siguiente rodamiento:
Datos del Rodamiento.
SERIE Peso Dext Dc DintAlturaMed
iaDtornex DtornInt
231.20.0500.013.11.1503
39.5 640.8 630 434 56 585 462
Datos de la corona.
Modulo(mm) Nº DientesReducciónDel
addendum
Angulo depresión
º
6 105 -0,6 20
45

Piñón a acoplar con la corona de la dirección.
• Para evitar posibles interferencias entre los dientes del conjunto piñón corona se recomienda una relación:
Zp
Zc=
18
105=
1
5,83
Siendo:
Zp: Número de dientes del piñón.
Zc: Número de dientes de la corona.
• Conocidas las condiciones en el eje de salida calcularemos las condiciones que experimentará el piñón para la
relación Zp
Zc escogida:
Condiciones en el eje de dirección(corona)
M DirecciónRueda (kN·m ) 21,5
wDirecciónRueda (r.p.m) 1
˙W DirecciónRueda (kW ) 2,2
Dc (mm) 630
Zc 105
Diseño del piñón.
Siendo:
Dp: Diámetro primitivo delpiñón.
M p : Par experimentado por elpiñón.
w p : Velocidad angular en el eje de entrada del motoreductor.
CoronaPiñón
Motoreductor de la dirección.
RelaciónReducciónZp
Zc=
18
105
Ejededirección
M p(kN·m )=M c
ηmec·Z p
Z c
=21,5
0,95·
1
5,83=3,88
w p(r.p.m)=w c ·(Z p
Z c
)−1
=1·5,83 =5,83
Z p=18
D p(mm)=Dc ·Z p
Z c
=630·1
5,83=108,6
ηmécPiñón−Corona=0,95
46

Cálculo del motor empleado para la dirección.
Conocidas las condiciones en el eje del piñón y teniendo en cuenta la relación de reducción que se produce en el
motoreductor considerando similares rendimientos mecánicos e hidráulicos, se seleccionará el motoreductor de la serie
TecnoTrans SlewDrives 705TF2 Crane con relación de reducción 1/12 :
Condiciones en el piñón:
M PiñonDirecciónRueda
(kN·m ) 3,88
wPiñonDirecciónRueda (r.p.m) 5,83
˙W PiñónDirecciónRueda (kW ) 2,45
Se deberá de verificar las condiciones que vienen mostrándose para los anteriores dimensionamientos demotoreductores teniendo en cuenta los rendimientos mecánicos (92%) e hidráulicos (90%) que tendrán lugar en elmismo:
1. Verificación del Par.
M PiñonDirecciónRuedaRequerido(kN·m ) M Motoreductor
Max (kN·m ) ¿M MotoreductorMax (kN·m )>M tracción
Rueda?
4,21 6,50 Cumple
2.Velocidad de giro del motoreductor a la entrada menor a 1500 r.p.m.
Relación de reducciónw p
(r.p.m)wMotoreductor
Entrada
(r.p.m)¿w Motoreductor
Entrada <1500r.p.m?
1
125,83 70,00 Cumple
Equipo hidráulico requerido para la maniobra de dirección.
Se procederá de igual forma que para el caso del cálculo del equipo hidráulico requerido para la maniobra de elevación
y dirección:
˙W Dirección
RuedaRequerida(kW ) 2,58
ηhid 0,90
˙W HidraulicaRuedaRequerida(kW ) 2,87
Q(l/min) 5,74
47

4.4 Equipos hidráulicos a instalar.
Para dimensionar las bombas que accionarán todos los motoreductores encargados de realizar las maniobras
anteriormente descritas, se mostrará el siguiente cuadro resumen que incluirán los pares y potencias requeridas por
cada motoreductor en cada maniobra así como los caudales requeridos teniendo en cuenta los respectivos
rendimientos:
ManiobraM Requerido
Elemento
(kN·m )
˙W hidraulico
Elemento
(kW )
QElemento
(l
min)
Elevación 15,02 21,2 42,38
Traslación(5% pendiente)
6,65 9,02 17,64
Dirección 4,23 2,87 5,3
La bomba de caudal variable B1 será la encargada de proporcionar el par y energía necesario para la realización de las
maniobras de elevación y traslación:
M B1(kN·m )=max (M elev ,M traslacion)
ηMécB1
=max(2·15,02;4·6,65 )
0,92=
30,04
0,92=32,65
˙W B1
Hid(kW )=
max( ˙W elev , ˙W traslacion)
ηHidB1
=max(2·21,2;4·9,02 )
0,90=47,11
Puesto que la maniobra de elevación es la que requiere mayor potencia será la que determine el caudal mínimo
requerido por la bomba:
QB1(l
min)=94,22
Para el caso de la bomba B2 encargada de efectuar la maniobra de dirección requerirá:
M B2(kN·m )=4·M Dirección
ηMec
B2=4·
4,23
0,92=18,39
W B2(kW )=4·W Dirección
ηHid
B2=4·
2,870,90
=12,75
QB2(l
min)=25,5
48

En último lugar se dimensiona el motor diésel encargado de accionar tanto el acoplador como las bombas electrohidráulicas suponiendo un rendimiento mecánico del 92% debido a las pérdidas mecánicas debidas al acoplador :
Maniobra M TotalRequerida (kN·m ) ˙W Total
Requerida (kW )
Elevación 32,65 47,21
Traslación (5% pendiente)
28,91 40,01
Dirección 18,39 12,75
Puesto que la maniobra de elevación no podrá ejecutarse simultáneamente a las de dirección y traslación, considerandoun rendimiento mecánico del 90%, el par máximo que deberá trasmitir será:
M Diesel (kN·m )=max(M Traslación+M Dirección ;M Elevación)
ηmec
M Diesel(kN·m )=max(28,91+18,39;32,65 )
0,92=51,41
Respecto a la potencia requerida se tendrán en cuenta las consideraciones anteriormente mencionadas:
˙W Diesel (kW )=max( ˙W Traslación+ ˙W Dirección; ˙W Elevación)
˙W Diesel (kW )=max(40,01+12,75;47,2 )=52,76
Se observa que el motor diésel a instalar deberá ser capaz de proporcionar más de 52,76 kW (72 cv) y generar en eleje de salida un par mínimo de 51,41 kN·m , siendo la maniobra conjunta de traslación y giro la más exigente.
49

4.5. Relación de masas.
Cable.
Conocida la sección de cable y las dimensiones del tambor con doble ranurado a instalar se obtendrá la masa
aproximada debida a los cables:
mcabletambor(kg )=mcable(
kg
100m)·L cable
Tambor (m)
W cable(kN
m)=
mcabletambor(kg )
Ltambor(m)·10 (
N
kg) ·
1
1000(
kN
N)
Masa de los cables.
d cable (mm) 12
mcable(kg
100m) 58,9
Dtambor (mm) 775
LcableTambor (m) 139
mcableTambor (kg ) 82
NºTamboresainstalar 2
mcableTotal
(kg ) 164
Carga Lineal debida al peso de los cables.
LTambor (m) 1,65
W cables(kN
m) 1
Poleas.
Masa de polea.
d cable (mm) 12
D polea(mm) 310
m polea(mm) 56,85
Nºtotalpoleas 6
m poleaTotal (mm) 341,1
Aparejo de elevación.
Se empleará un aparejo de carro abierto de cuatro poleas modelo 0.41.12.M5 extraído del catálogo de la empresa
GOSAN.
Masa del Aparejo
mAparejo(kg) 305
nºTotalaparejos 4
maparejosTotal (kg ) 1220
50