4. Actuadores Neumaticos
106
Click here to load reader
Transcript of 4. Actuadores Neumaticos

ACTUADORES
Ing. Eduard Galvis R.

Design with Controlsg

Objetivos de la clase
• Aprender a utilizar circuitos neumáticos y eléctricos y el PLC para la solución de un y pproblema típico en la industria.
• Conocer elementos Neumáticos básicos.
• Establecer diferencias entre circuitos lógicos Eléctricos y Neumáticos.
• Entender funcionamiento básico del PLC.

Motivación
Ejemplo de sistema: Elevador de paquetes

Estructura Básica de Automatismo
ORDENES
INTERFACES
CON
INTERFACES(Usuarios)
PREACTUADORES
ACTUADORES
OPER
TROL
SISTEMA MECÁNICO
ATIVA
MÓDULOS DE COMUNICACIÓNES
(Ot i t )
SENSORESINTERNOS
A
RESPUESTAS(Otros sistemas)

Contexto:Automatización
Instrumentación IndustrialIng Eduard GalvisIng. Eduard Galvis

Automatización
Es el uso de tecnologías que involucran laaplicación de sistemas mecánicos electrónicos yaplicación de sistemas mecánicos, electrónicos ycomputacionales para operar y controlar demanera eficiente una máquina o un procesomanera eficiente una máquina o un proceso.

Automatismo
Lógica y componentes necesarios para llevar a cabo la automatización de un procesocabo la automatización de un proceso

Automatización
Obj i d l i ióObjetivos de la automatización
Aumentar la competitividad de un producto en elmercadoAumentar la calidad de los productosSustituir operaciones imposibles o muySustituir operaciones imposibles o muycomplicadas de controlar manualmenteEli i ió d i l dEliminación de riesgos para los operadoresReducción de costos de mano de obra

Automatización
Tipos de automatización
Automatización Fija
Automatización Programableg
Automatización FlexibleAutomatización Flexible

Automatización fijaj
Es un sistema en el cual la secuencia de las operaciones de proceso o ensambles es establecida por la configuración misma del equipo sin posibilidad de variantes considerables.

Automatización fija
Características
j
Características
– Alta inversión de equipo e instalaciones
– Altas tasas de producción
– Fabricación normalmente en línea
– Inflexible para realizar cambio en los productosp oduc os

Automatización programablep g
El equipo de producción esta diseñado con la capacidad de cambiar la secuencia de operacionespara lograr una diferente configuración del producto.

Automatización programable
L i d i t t l d
p g
La secuencia de operaciones esta controlada por un programa, el cual tiene una serie de instrucciones
l i t d l i t tque el sistema puede leer e interpretar.
Nuevos programas pueden ser preparados y cargados al equipo para producir un nuevo producto.q p p p p

Automatización programable
Características
p g
– Nivel de producción bajo a mediano
Fabricación generalmente por lotes– Fabricación generalmente por lotes
– Flexibilidad para adaptarse a cambios en la fi ió d l d tconfiguración del producto
– Para producir un nuevo producto el sistema debe ser reprogramado, así como realizar los cambios necesarios de herramentales y sistemas de sujeción.
– El tiempo de cambio de modelo debe de ser considerado para agregarlo al tiempo de ciclo del
d tproducto.

Automatización flexible
Es una variante de la automatización programableen la cual es capaz de producir una variedad de p pproductos (familia) sin pérdida de tiempo en la preparación de cambios de modelo.p p
Consecuentemente, el sistema puedeConsecuentemente, el sistema puede producir varias combinaciones de productos en su programación de producción.en su programación de producción.

Automatización flexible
Características
– Producción continua de una variedad de productos.
– Tasa media de volumen de producción– Tasa media de volumen de producción.
– Flexibilidad para adaptarse variantes en el diseño de producto.

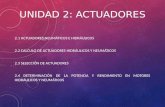
Tipos de automatizaciónNúmero de PartesDiferentes
p
Diferentes
ucto
Alto
AutomatizaciónProgramable
de P
rodu
Medio
Vari
edad
d Medio AutomatizaciónFlexible
Va
BajoAutomatización
FijaMétodosManuales
Volumen de Producción
Bajo Medio Alto Número de Partespor AñosVolumen de Producción por Años

Razones para automatizarp
1. Incremento en el volumen de producción2 M j d l lid d d l d t2. Mejora de la calidad del producto3. Reducir el tiempo de ciclo de los p
productos4 Reducción de inventario en proceso4. Reducción de inventario en proceso5. Seguridad de las operaciones6. Reducción del costo de mano de obra

Estructura Básica de Automatismo
ORDENES
INTERFACES
CON
INTERFACES(Usuarios)
PREACTUADORES
ACTUADORES
OPER
TROL
SISTEMA MECÁNICO
ATIVA
MÓDULOS DE COMUNICACIÓNES
(Ot i t )
SENSORESINTERNOS
A
RESPUESTAS(Otros sistemas)

Estructura Básica de Automatismo
• Un sistema automatizado se compone de dos partes:partes:
U d l di l i– Una parte de control, que coordina las acciones de la parte operativa
– Una parte operativa, donde los actuadores li i b lrealizan sus acciones sobre los procesos
automatizados

Parte de control
Emite ordenes hacia la parte operativa y recibe las señales de retorno con objeto de coordinar sus acciones.
En el corazón de la parte de control, el “tratamiento” esEn el corazón de la parte de control, el tratamiento es la convergencia de tres dialogos que ella coordina:

Parte de control
El diálogo en la máquina:
Parte de control
• Consignas a los actuadores vía los preactuadores• Adquisición de señales de retorno enviadas por los sensores que
indican la evolución de la máquina o producto.
El diálogo hombre-máquina (Interfaces)P j ió j di ó i d l• Para manejo, programación, ajustes y diagnósticos de la máquina
• La persona emite consignas y recibe información de retorno.
El diálogo con otras máquinas(Comunicaciones)(Comunicaciones).
• Varias máquinas pueden interactuar en un mismo sistema de producción, la coordinación se garantiza por el dialogo entre las
t d t l t é d i ibi ñ l (I tpartes de control, a través de enviar y recibir señales (Inputs y Outputs).

Parte Operativa
Este componente de la estr ct ra básica de nEste componente de la estructura básica de un automatismo es la que realiza el trabajo físico sobre los materiales el producto etclos materiales, el producto, etc.
Los elementos que la conforman son los siguientes:Los elementos que la conforman son los siguientes:

Parte Operativa
• Preactuadores: Destinados a coordinar las acciones de los actuadores, por ejemplo:– Variador de velocidad– Electroválvula– Driver’s o tarjetas de control.j
• Actuadores: Destinados a proporcionar la ctuado es es dos p opo c ofuerza necesaria para mover los sistemas mecánicos, por ejemplo:p j p– Motor eléctrico– Cilindro neumático– Cilindro hidráulico

Parte Operativa
• Sensores i l i f ió d l• Sensores: proporcionan la información de retorno para la conducción del proceso.– Microswitchs– Sensores Inductivos– Sensores ópticos
Encoders– Encoders
• Sistema Mecánico: Herramientas y dispositivos diversosSistema Mecánico: Herramientas y dispositivos diversos para el proceso, por ejemplo:– Moldes– Herramientas de corte– Estructura mecánica de una prensa– Guías, bandas, engranes etc.Guías, bandas, engranes etc.

Ejemplo (1)– Sistema electroneumático
Ejemplo (1)Sistema electroneumático
CilindroCilindro Neumático
(ACTUADOR)
Electroválvula Interruptores de (PREACTUADOR)
Y1 Y2límite(PREACTUADOR)
(Sensores Internos)
PSR

Ejemplo (2)
– Sistema Robótico
Ejemplo (2)
– Sistema Robótico
SENSOR INTERNOSistema Servo de Encoder
V i d d
Retroalimentación
RotaciónE
Encoder
SISTEMA MECÁNIC
Variador de Velocidad V M
Motor
PREACTUADORSISTEMA MECÁNIC
ACTUADOR

AARQUITECTURA DE UN RQUITECTURA DE UN SSISTEMA DE ISTEMA DE PPRODUCCIÓNRODUCCIÓNAARQUITECTURA DE UN RQUITECTURA DE UN SSISTEMA DE ISTEMA DE PPRODUCCIÓNRODUCCIÓN
MATERIAS PRIMASMATERIAS PRIMAS
Parte Operativa(Proceso)
ÍÍENERGÍAENERGÍA
MATERIAS ELABORADASMATERIAS ELABORADAS

AARQUITECTURA DE UN RQUITECTURA DE UN SSISTEMA ISTEMA AAUTOMÁTICOUTOMÁTICO DE DE PPRODUCCIÓNRODUCCIÓNPPRODUCCIÓNRODUCCIÓN
MATERIAS PRIMASMATERIAS PRIMAS
Parte Operativa(Proceso)
ÍÍ
Parte de Mando(Controlador)
ENERGÍAENERGÍA
MATERIAS ELABORADAMATERIAS ELABORADA

TTÉCNICAS DE ÉCNICAS DE AAUTOMATIZACIÓN UTOMATIZACIÓN EEVOLUCIÓNVOLUCIÓNTTÉCNICAS DE ÉCNICAS DE AAUTOMATIZACIÓN. UTOMATIZACIÓN. EEVOLUCIÓNVOLUCIÓN
SSUSTITUCIÓN FUERZA HUMANA POR ANIMALUSTITUCIÓN FUERZA HUMANA POR ANIMAL•• SSUSTITUCIÓN FUERZA HUMANA POR ANIMALUSTITUCIÓN FUERZA HUMANA POR ANIMAL
•• SSUSTITUCIÓN FUERZA ANIMAL POR USTITUCIÓN FUERZA ANIMAL POR •• SSUSTITUCIÓN FUERZA ANIMAL POR USTITUCIÓN FUERZA ANIMAL POR
EÓLICA/HIDRÁULICAEÓLICA/HIDRÁULICANO NO SON SON TTÉCNICAS DE ÉCNICAS DE AAUTOMATIZACIÓNUTOMATIZACIÓN
SON FUENTES DE ENERGÍASON FUENTES DE ENERGÍA
LA PARTE DE MANDO SIGUE RECAYENDO EN UN SER HUMANOLA PARTE DE MANDO SIGUE RECAYENDO EN UN SER HUMANO
••TTECNOLOGÍA MECÁNICAECNOLOGÍA MECÁNICA ••TECNOLOGÍA ELÉCTRICATECNOLOGÍA ELÉCTRICA••TTECNOLOGÍA MECÁNICAECNOLOGÍA MECÁNICA
••TECNOLOGÍA NEUMÁTICA/HIDRÁULICATECNOLOGÍA NEUMÁTICA/HIDRÁULICA
••TECNOLOGÍA ELÉCTRICATECNOLOGÍA ELÉCTRICA
••TECNOLOGÍA ELECTRÓNICTECNOLOGÍA ELECTRÓNIC

TTECNOLOGÍA ECNOLOGÍA MMECÁNICAECÁNICATTECNOLOGÍA ECNOLOGÍA MMECÁNICAECÁNICA
RRUEDAUEDA FFRESADORARESADORA•• RRUEDAUEDA •• FFRESADORARESADORA

TTECNOLOGÍA ECNOLOGÍA MMECÁNICA IIECÁNICA IITTECNOLOGÍA ECNOLOGÍA MMECÁNICA IIECÁNICA II
••MMÁQUINA DE VAPOR DE ÁQUINA DE VAPOR DE WWATT (1819)ATT (1819)MMÁQUINA DE VAPOR DE ÁQUINA DE VAPOR DE WWATT (1819)ATT (1819)

TTECNOLOGÍA ECNOLOGÍA MMECÁNICA IIIECÁNICA IIITTECNOLOGÍA ECNOLOGÍA MMECÁNICA IIIECÁNICA III

EESQUEMA SQUEMA GGENERAL DE UN ENERAL DE UN SSISTEMA ISTEMA AAUTOMATIZADOUTOMATIZADO
CONTROL EN LAZO ABIERTOCONTROL EN LAZO ABIERTO
Preaccionadores Accionadores
Parte operativa(proceso)
Parte de Mando(controlador) (p )( )

EESQUEMA SQUEMA GGENERAL DE UN ENERAL DE UN SSISTEMA ISTEMA AAUTOMATIZADOUTOMATIZADO
CONTROL EN LAZO CONTROL EN LAZO CERRADOCERRADO
Preaccionadores Accionadores
CONTROL EN LAZO CONTROL EN LAZO CERRADOCERRADO
Preaccionadores Accionadores
Parte operativaParte de MandoSupervisión p(proceso)
Parte de Mando(control)
Supervisión
Captadores

Tecnologías de Control
• Cableada• Cableada– Circuitos lógicos neumáticos
Circuitos lógicos Eléctricos– Circuitos lógicos Eléctricos
• Programable• Programable– PLC
5

Tecnologia Cableada
Con la tecnología cableada, el automatismo li ód l d ise realiza con módulos conectados entre si.
El funcionamiento obtenido es el resultado de la selección de módulos y del cableadode la selección de módulos y del cableadoque los liga.
El automatismo es totalmente personalizadoli ió ífipara una aplicación específica.

Tecnologia Cableada
Tres Tecnologías permiten la realización de automatismos cableados:
– Relevadores electromagnéticosRelevadores electromagnéticos
Módulos lógicos neumáticos– Módulos lógicos neumáticos
T ód l l ó– Tarjetas o módulos electrónicos.

Neumática
Tecnología que emplea el aire como modo d t i ió d l í ide transmisión de la energía necesaria
para mover y hacer funcionar automatismos

Ventajas Neumática
• Fácil captación• AlmacenableAlmacenable• Abundante
Si i d d l i• Sin propiedades explosivas• Baja sensibilidad a temperatura • Posible regular velocidad del pistón

Desventajas Neumáticaj
• Circuitos muy extensos pérdidas de cargas considerablescargas considerables
• Costos
• Ruido generado

TTECNOLOGÍA ECNOLOGÍA NNEUMÁTICA / EUMÁTICA / HHIDRÁULICAIDRÁULICA

Elementos: Cilindro Neumático
Émbolo
VástagoCámaras VástagoCámaras

Tipos de Cilindros
Simple Efecto Doble Efecto
Doble vástago Doble efecto dos ástagosDoble vástago Doble efecto, dos vástagos
10

Tipos de Cilindros
10

Activación de Cilindros
10

Simbología

Simbología
Símbolos según DIN ISO 1219 "Técnica de fluidos – Símbolos gráficos y esquemasgráficos y esquemasde conexiones“

Elementos: Válvulas

Elementos: Válvulas

Válvulas

Válvulas
Posiciones: Estados posibles de la válvulaPosiciones: Estados posibles de la válvula
A í Lí d t b j D fAccesos o vías: Líneas de trabajo + Desfogues +Presión
3 Vías (Accesos) / 2 Posiciones = 3 / 2 vías

Válvulas
A B
Y1
PSR
P
5/2 vías con restablecimiento.5/2 vías con restablecimiento.

Válvulas
A B
Y1
PSR
5/2 vías con restablecimiento.5/2 vías con restablecimiento.

Tipos de válvulas2
1Válvula 2/2
Válvula 3/2
22
1 3
Válvula 4/2 Válvula 5/2
4 2 4 24 2
1 35
13
1 3
15

Tipos de válvulas2
1
22
1 3
4 2 4 24 2
1 35
13
1 3
15

Elementos de Neumática
Sensor de posición
Válvula Shuttle(OR)
Unidad deVálvula de dos
presiones(AND)
Unidad de Servicio

Válvulas

Denominación de Conexiones

Denominación de Conexiones

Ejemplo de Sistema Neumático
Cilindro Neumático
A B
SY1
RP
SRP

Ejercicio
Ejemplo de sistema: Elevador de paquetes

Diagrama espacio fase
A+
A - ↑ - ↓ -B - - ↑ - ↓A+
A-B ↑ ↓
A0 A11
A001
B
B0
B0
B10 E1 E2 E3 E4 E5 B1

Circuitos Neumáticos

Válvulas
A (Línea de Trabajo)
Pilotaje Restablecimiento
A (Línea de Trabajo)
Pilotaje Restablecimiento
R (Desfogue)
P(Presión)( )

Válvulas
Presión: P
Desfogues: R,S,T
Líneas de Trabajo: A,B,C

Válvulas
Pilotajes:
Neumático
Hidráulico
EléctricoEléctrico

Tipos de Accionamiento
Pilotaje:j

Tipos de Accionamiento
Pilotaje - Finalidad:j

Tipos de Accionamiento
Pilotajej

Tipos de Accionamiento

Válvulas
Posiciones: Estados posibles de la válvulaPosiciones: Estados posibles de la válvula
A í Lí d b j D f P ióAccesos o vías: Líneas de trabajo + Desfogues +Presión
3 Vías (Accesos) / 2 Posiciones = 3 / 2 vías

Válvulas
Ej lEjemplos:4/2 vías con restablecimiento.
A BA B
Y1
R
Y1
Y1 A BP
R Y1 A B0 0 11 1 01 1 00 0 1

Válvulas
4/2 vías sin restablecimiento.4/2 vías con memoria estable.
A BA B
Y1Y1 A B0 0 11 1 0R
Y1
1 1 00 1 01 0 1
PR
1 0 10 0 1

Válvulas
5/2 vías con restablecimiento.
A BA B
Y1
Y1 A BS
Y1
R Y1 A B0 0 11 1 0P
SR
0 0 1

Válvulas
A B
Y1 Y2
S
Y1
R
Y2
Y1 Y2 A B0 0 0 1P
SR
5/2 vias con doble pilotaje5/2 vías con memoria biestable
0 0 0 11 0 1 00 0 1 05/2 vías con memoria biestable. 0 1 0 10 0 0 1

Válvulas
Y1 Y2 A B5/3 vías con doble pilotaje y doble restablecimiento.
Y1 Y2 A B0 0 0 01 0 1 00 0 0 00 1 0 10 0 0 0A B 0 0 0 0A B
Y1 Y2
SR
Y2
PSR

Analogía con Compuertas Lógicas
Latch SR
AND y OR múltiples

Analogía con Compuertas Lógicas

Válvulas de Cierre y Caudal

Accionamientos Giratorios

TTECNOLOGÍA ECNOLOGÍA EELÉCTRICALÉCTRICATTECNOLOGÍA ECNOLOGÍA EELÉCTRICALÉCTRICA

Elementos Eléctricos
SensorElectroválvula
SensorInductivo
SensorCapacitivo
Switch Sensormagnético
RelaySolenoide ElectroválvulaElectroválvula
20

Mando de un cilindro de simple efectoefecto

Mando de un cilindro de simple/doble efecto
La segunda i t tilivariante se utiliza
cuando la potencia no es suficiente para activar la pbobina Y1 o cuando se maneja otro voltaje

Activación en paralelo/serie de cilindros de psimple/doble efecto

Mando a ambos lados de un cilindro
En este caso un soloEn este caso un solo pulso del botón es suficiente para memorizar la acción de
d ál lcada válvula.
La acción seguida de cada válvula cancela lacada válvula cancela la de la otra

Retorno automático y movimiento oscilante yde un cilindro
S2 – Switch de límite como final de carrera
Notar que S3 es de enclavamiento, y que S1 actúa sólo cuando S3 está conectado

Circuito de autorretención o enclavamiento
Arranque prioritario Paro prioritario
La autorretención permite utilizar válvulas con regreso por resorte ⇒ ¡50% ahorro!p g p ¡

Mando de un cilindro con circuito de autorretención
Retroceso automático de
ili dun cilindro con un final de carrera

Mandos con temporizaciónp
Con retardo a la activaciónactivación
C SCuando el vástago llega a S2, para 10 seg y después regresa

Circuito Lógico Eléctrico
htt // l ti /j ti50/d / ti ht lhttp://olmo.pntic.mec.es/jmarti50/descarga/neumatica.html

Diagrama de Espacio - Fase
A BA B 1A001
BB0
E E E E EE0 E1 E2 E3 E4

Ej: Sistema Electroneumático
Las órdenes son las siguientes:
• A1: aproximación de la pieza a la zona de conformado• B1, C1: conformado de la pieza•A0: retroceso de la alimentaciónA0: retroceso de la alimentación• A1, B0: retroceso del útil de conformado y salida del vástago de extracción• C0: retroceso del molde de conformado•A0: retroceso de la pieza conformada p

Ejemplo

Ejercicio
Estampador(B)Inicio
Ali d fij dE l d Alimentador-fijador(A)
Expulsador(C)

TTECNOLOGÍA ECNOLOGÍA EELECTRÓNICALECTRÓNICATTECNOLOGÍA ECNOLOGÍA EELECTRÓNICALECTRÓNICA

Controlador Lógico Programable (PLC)(PLC)
“Es una Computadora, robusta, especializada y diseñada para el control de máquinas y/o procesos en ambientes industriales”q y p
“Dispositivo programable capaz de realizar operaciones lógicasb ñ l d t d j t d ñ l dsobre señales de entrada, para generar un conjunto de señales de
salida y poder controlar cualquier proceso”

Ventajas de los PLC
• Flexibilidad• Fácil ReconfiguraciónFácil Reconfiguración• Funciones Avanzadas
T ñ C t• Tamaño Compacto• Facilidad de Interfaz• Sencillo Lenguaje de Programación

Esquema General de un PLC
CPUSistema I/O
Procesador Memoria
I/O
Comunicaciones
Modulo I/OI/O
25

Ciclo de Exploración
Leer EntradasLeer Entradas
Ejecutar Programa
Actualizar EstadosSalida

Solución con el PLC
5A0,A1,B0,B1,PAQ
4
Y1,…,Y4
PLC

ConclusiónNeumático Eléctrico
Diagrama Escalera
4
Diagrama Escalera
4
4
PLC

Bibliografia para consultag
• Ingeniería de la Automatización Industrial. Ramón gPiedrahita Moreno. Ed. Ra-ma.
• FESTO. Manuales de Neumática, Electroneumática y Oleohidráulica.

GRACIASGRACIAS