011-Reporte Shear Wave Velocity Controldataseismic.com/descargas/soporte_05.pdf · ambiente...
27
REPORTE “Shear-Wave Velocity Control” by John P. Castagna, Michael L. Batzle, Kenneth M. Tubman, James E. Gaiser, and Michael D. Burnett. Analizado por DataSeismic
Transcript of 011-Reporte Shear Wave Velocity Controldataseismic.com/descargas/soporte_05.pdf · ambiente...

REPORTE
“Shear-Wave Velocity Control”
by John P. Castagna, Michael L. Batzle, Kenneth M. Tubman, James E. Gaiser, and Michael D. Burnett.
Analizado por DataSeismic

2
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
INDICE GENERAL Introducción……………………………………………………………. 3 Mediciones de laboratorio……………………………………………… 4 Perfiles de pseudo-velocidad de cizalla ……………………………… .10 Perfiles sónicos de “full-waveform” …………………………………. .11 Caso 1: Formaciones “duras” (Vs >> Vf)…………………………..13 Caso 2: Formaciones “medio-duras” (Vs > Vf)…………………......13 Caso 3: Formaciones “lentas” (Vs < Vf)…………………………....14
Caso 4: Formaciones “muy lentas” (Vs << Vf)…………………...... 14 Formas de onda sónica de varios polos ……………………………….. 16 Perfiles sísmicos verticales……………………………………………. 18 Ejemplo 1 – Rocas clásticas de la Costa del Golfo de Texas………. 21 Ejemplo 2 – Pizarras Devónicas………………………………...23 Discusión y conclusiones……………………………………………... 26

3
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
INTRODUCCION La calibración cuantitativa de la variación de la amplitud con los datos de offset mediante un modelado sísmico requiere información de la velocidad de la onda S. El propósito de este trabajo es repasar los medios para adquirir velocidades de la onda S en perforaciones mediante: (1) mediciones de laboratorio, (2) perfiles de velocidad de cizalla derivados de tendencias empíricas y de datos de perfiles de pozos, (3) perfiles sónicos convencionales, (4) perfiles sónicos de la onda S directa, y (5) perfiles sísmicos verticales con fuentes horizontales o “puntuales”. Cada técnica tiene una exactitud limitada. Sin embargo, al ser aplicada con suficiente precaución, cada una provee la información necesaria para interpretar la variación de la amplitud sísmica cerca de una perforación. Las mediciones de laboratorio son útiles para el estudio de las variaciones de velocidad, pero debido al muestreo, a la escala, y a consideraciones de frecuencia, no proveen un control de la velocidad directa para datos sísmicos superficiales. Los perfiles sónicos de la onda S ofrecen una medida de la variación de velocidad vertical con una alta resolución pero contienen errores de procesamiento, sufren de daños de la perforación, y cuentan con una investigación lateral limitada. Los perfiles sísmicos verticales son comparables con datos sísmicos superficiales en cuanto a la frecuencia y escala, pero tienen una resolución vertical pobre en comparación con los perfiles de pozo. Este trabajo provee una revisión de los métodos de adquisición de velocidades de ondas S en perforaciones, con algunos ejemplos y comparaciones entre las técnicas aplicadas a rocas clásticas en la Costa del Golfo y a pizarras Devónicas.

4
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
MEDICIONES DE LABORATORIO. Las velocidades de la onda S han sido medidas en el laboratorio durante medio siglo. Muchas de estas técnicas utilizadas en rocas fueron desarrolladas primero en materiales con el fin de estudiar las propiedades de aleaciones, cerámicas, compuestos, etc. Los métodos de medición más comunes son (1) experimentos de propagación de ondas generalmente realizados en el rango de frecuencias ultrasónicas entre 0.2 y 2 MHz, y (2) mediciones de los módulos de rigidez con un cálculo subsiguiente de la velocidad de la onda S, haciendo resonar la muestra a una frecuencia de entre 500 Hz y 40 KHz. La complejidad del procedimiento experimental está determinada por el objetivo de la medición; desde una simple resonancia de un rayo en un material isótropo y homogéneo hasta la propagación compleja de un pulso para derivar el tensor de rigidez completo. El equipamiento disponible para medir las propiedades de la onda S es algo sofisticado, y la exactitud suele ser alta en materiales competentes. Las mayores incertidumbres surgen a partir de (1) señales débiles en rocas suaves, (2) muestras no-representativas, inhomogéneas o alteradas, o (3) condiciones experimentales aplicadas en forma inapropiada. El laboratorio provee numerosas ventajas y desventajas en cuanto a la investigación de las propiedades de la onda S. En él se le puede aplicar a la muestra un ambiente conocido, controlado; incluyendo presión de confinamiento o esfuerzos inhomogéneos, presión en los poros, temperatura, y la composición específica del fluido dentro de los poros. Las velocidades pueden ser determinadas para direcciones múltiples de propagación y de polarización. La mineralogía y fabricación de la muestra pueden ser comprobadas con exactitud. Finalmente, se puede medir la porosidad, densidad, conductividad eléctrica, permeabilidad del fluido, etc. y utilizarlas en modelos teóricos o en correlaciones empíricas. Los métodos de laboratorio también imponen restricciones que pueden limitar la utilidad de los resultados o invalidarlos totalmente. Normalmente, la frecuencia de la medición es alta y fuera del rango de los datos sísmicos superficiales o de perforaciones. Todas las muestras medidas en el laboratorio son perturbadas de alguna manera. Para rocas suaves o ricas en arcilla, esta perturbación puede alterar substancialmente las propiedades medidas. Un problema está relacionado con la escala y la estadística: técnicas de medición in situ promedian distancias desde metros a cientos de metros mientras que la escala en el laboratorio es del orden del centímetro. En consecuencia, las mediciones de laboratorio necesitan ser promediadas. El mayor beneficio de los datos de laboratorio yace en el desarrollo de las relaciones teóricas y de tendencias empíricas. En profundidad, las rocas están expuestas a altas presiones y temperaturas. El marco mineral de la roca genera un esfuerzo “litostático” y además existe una presión debida al fluido en los poros. Las propiedades mecánicas de una roca, incluyendo la velocidad de la onda S, son sensibles a estas presiones. Por lo tanto, la mayoría de las mediciones son realizadas dentro de recipientes de presión donde tanto la presión litostática como la de los poros pueden ser controladas. Por otro lado, la influencia de la temperatura es de un segundo orden y la mayoría de las mediciones son realizadas a temperatura ambiente, excepto cuando se simulan grandes profundidades o se está

5
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
estudiando un fenómeno en particular. Las condiciones del ambiente son controladas mediante un sistema hidráulico y bobinas de calefacción (Figura 1). A menudo, la medición de la onda S es simple comparada con la simulación de las condiciones del ambiente. La mayoría de los valores de la velocidad de la onda S medidos en el laboratorio son obtenidos mediante la propagación de un pulso de onda S (transmisión de pulso). Las velocidades son derivadas del tiempo requerido para que el pulso viaje desde un transductor transmisor hasta uno receptor. Un circuito experimental generalizado se muestra en la Figura 2. Una forma de onda típica registrada con esta configuración se muestra en la Figura 3. Aquí, el arribo de la onda transversal es claro, y los arribos de interferencia de la onda P se observan un poco antes de la onda S. Alternativamente, se puede usar un transductor simple y se puede registrar el tiempo de viaje del eco. Las técnicas de propagación son fuertes, flexibles, y relativamente simples de utilizar. La propagación y polarización en varias direcciones permiten la medición de la anisotropía. Sin embargo, estas mediciones están restringidas a frecuencias por encima de las bandas de los perfiles sísmicos y sónicos. Las señales pueden ser débiles o ruidosas debido a un acoplamiento pobre entre los transductores y la muestra, en particular cuando la muestra no está bien consolidada. Las fuentes y receptores para estas técnicas de propagación son cristales piezoeléctricos. Las frecuencias utilizadas dependen del tamaño del grano del mineral y del tamaño total de la muestra. La longitud de onda de la señal debe ser del orden de diez veces el tamaño del grano sino la dispersión va a atenuar la señal y las inhomogeneidades dominarán el recorrido del rayo. Es difícil excitar a las bajas frecuencias y si la longitud de onda es muy grande se excitarán modos no deseados, efectos del campo cercano dominarán la señal, y será difícil determinar con precisión los tiempos de arribo. Bajo condiciones de laboratorio y para muestras comunes, estos criterios limitan frecuencias desde algunos cientos de kHz hasta 2 MHz. La Figura 4 muestra varias configuraciones de transductores. Mediante el uso de técnicas de interferencia de elementos flexibles, como se muestra en la Figura 4d, las mediciones se han realizado en el rango de los kilohertz. Frecuencias más altas pueden ser generadas, y son útiles para medir las constantes elásticas de los cristales simples. Resultados típicos de mediciones de la propagación en una muestra rocosa se muestran en la Figura 5.

6
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 1: Aparato ultrasónico de modo doble para aplicarle una carga triaxial a una muestra.
Figura 3: Imagen del osciloscopio de formas de onda de cizalla de pulsos de transmisión ultrasónicos. Figura 2: Esquema generalizado de las componentes electrónicas utilizadas en las mediciones de la velocidad ultrasónica de la onda de cizalla.

7
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 4: Configuraciones de transductores: (a) de Jamieson y Hoskins (1963): un trozo de vidrio es utilizado para generar ondas de cizalla a partir de transductores compresionales (vista de costado), (b) de Rafavich et al. (1984): un transductor construido a partir de trozos polarizados para generar una onda de torsión (vista desde arriba), (c) de Rai y Hanson (1988): ubicación y orientación de transductores para medir polarizaciones de cizalla específicas (proyección), (d) de Shirley y Hampton (1978): sonda de elementos “flexibles” para usar en sedimentos suaves.
Figura 5: Velocidad de las ondas compresional y de cizalla versus presión diferencial para una muestra de arenisca.
Figura 6: (a) Sección transversal. (b) Energía transmitida versus ángulo de rotación para una caliza Solenhofen. De King y Fatt (1962).
8
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
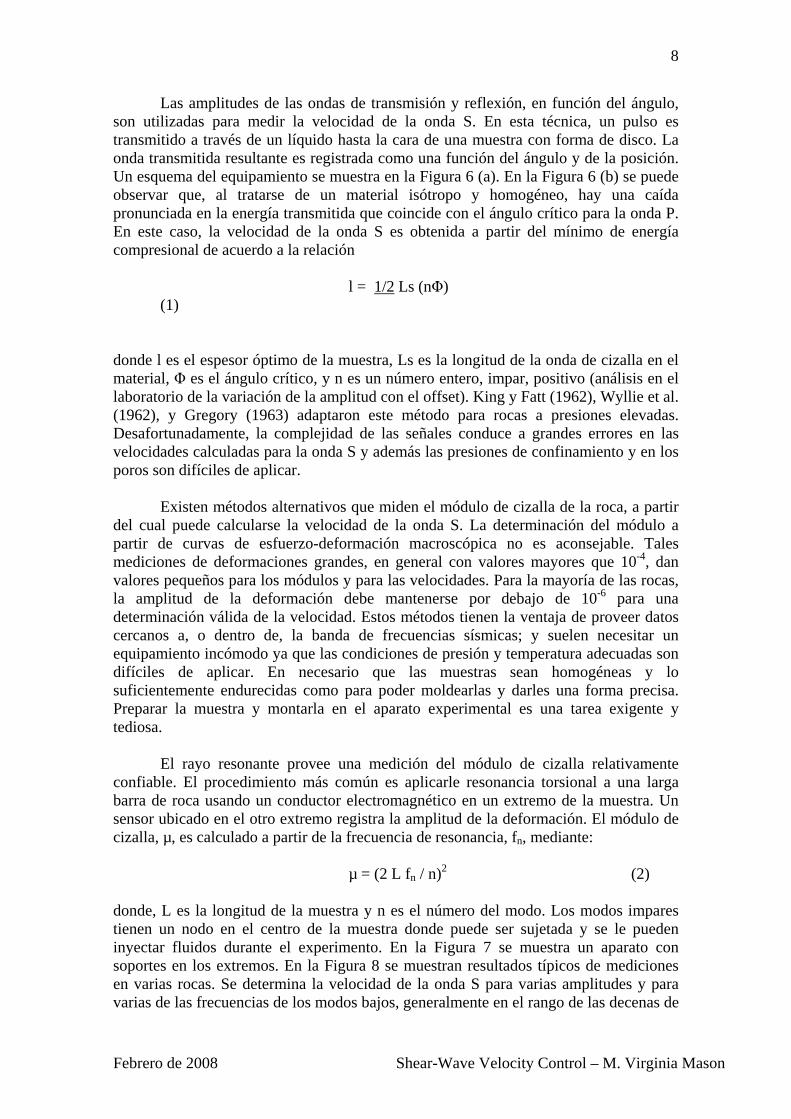
Las amplitudes de las ondas de transmisión y reflexión, en función del ángulo, son utilizadas para medir la velocidad de la onda S. En esta técnica, un pulso es transmitido a través de un líquido hasta la cara de una muestra con forma de disco. La onda transmitida resultante es registrada como una función del ángulo y de la posición. Un esquema del equipamiento se muestra en la Figura 6 (a). En la Figura 6 (b) se puede observar que, al tratarse de un material isótropo y homogéneo, hay una caída pronunciada en la energía transmitida que coincide con el ángulo crítico para la onda P. En este caso, la velocidad de la onda S es obtenida a partir del mínimo de energía compresional de acuerdo a la relación l = 1/2 Ls (nΦ) (1) donde l es el espesor óptimo de la muestra, Ls es la longitud de la onda de cizalla en el material, Φ es el ángulo crítico, y n es un número entero, impar, positivo (análisis en el laboratorio de la variación de la amplitud con el offset). King y Fatt (1962), Wyllie et al. (1962), y Gregory (1963) adaptaron este método para rocas a presiones elevadas. Desafortunadamente, la complejidad de las señales conduce a grandes errores en las velocidades calculadas para la onda S y además las presiones de confinamiento y en los poros son difíciles de aplicar. Existen métodos alternativos que miden el módulo de cizalla de la roca, a partir del cual puede calcularse la velocidad de la onda S. La determinación del módulo a partir de curvas de esfuerzo-deformación macroscópica no es aconsejable. Tales mediciones de deformaciones grandes, en general con valores mayores que 10-4, dan valores pequeños para los módulos y para las velocidades. Para la mayoría de las rocas, la amplitud de la deformación debe mantenerse por debajo de 10-6 para una determinación válida de la velocidad. Estos métodos tienen la ventaja de proveer datos cercanos a, o dentro de, la banda de frecuencias sísmicas; y suelen necesitar un equipamiento incómodo ya que las condiciones de presión y temperatura adecuadas son difíciles de aplicar. En necesario que las muestras sean homogéneas y lo suficientemente endurecidas como para poder moldearlas y darles una forma precisa. Preparar la muestra y montarla en el aparato experimental es una tarea exigente y tediosa. El rayo resonante provee una medición del módulo de cizalla relativamente confiable. El procedimiento más común es aplicarle resonancia torsional a una larga barra de roca usando un conductor electromagnético en un extremo de la muestra. Un sensor ubicado en el otro extremo registra la amplitud de la deformación. El módulo de cizalla, µ, es calculado a partir de la frecuencia de resonancia, fn, mediante: µ = (2 L fn / n)2 (2) donde, L es la longitud de la muestra y n es el número del modo. Los modos impares tienen un nodo en el centro de la muestra donde puede ser sujetada y se le pueden inyectar fluidos durante el experimento. En la Figura 7 se muestra un aparato con soportes en los extremos. En la Figura 8 se muestran resultados típicos de mediciones en varias rocas. Se determina la velocidad de la onda S para varias amplitudes y para varias de las frecuencias de los modos bajos, generalmente en el rango de las decenas de

9
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
kilohertz. Al agregar pesos fijos al montaje de la muestra, se obtiene un rango de frecuencias más ancho. El módulo de cizalla puede ser obtenido mediante la determinación del cociente entre el esfuerzo de cizalla y la deformación de cizalla. Jackson et al., 1984 (Figura 9) aplicó una fuerza de torsión periódica de baja amplitud para medir la deformación de cizalla resultante. En general, las mediciones de laboratorio no están atadas directamente a los datos sísmicos, pero suelen ser utilizadas para establecer la sistemática de la variación de la velocidad. Para una calibración de la respuesta sísmica se requieren mediciones continuas de la velocidad de la onda S como una función de la profundidad en una perforación.
Figura 7: Gráfico perspectivo del péndulo de torsión. OO´, eje de oscilación torsional; R, espécimen de longitud L; C, bobina de núcleo de aire; W1 y W2, pesos de inercia de hierro suave; A, brazo de inercia de acero inoxidable; J, zafiro (de Peselnick y Outerbridge, 1961). Figura 9: Configuración experimental para el estudio de la anelasticidad de las rocas bajo condiciones simultáneas de presiones (hasta 700 MPa) y temperaturas (hasta 1400°C) elevadas, frecuencias sísmicas (10-3 – 1 Hz), amplitudes de deformación bajas (<10-6) y presión en los poros controlada (Jackson et al; 1984).
Figura 8: Velocidad de cizalla, normalizada por la velocidad de cizalla medida en un vacío de ~ 1µ, (1 micro torr = 1.3 x 10-9 bares) versus la presión parcial relativa del vapor de agua (P0 (H20) = presión parcial del vapor de agua a STP, P = presión parcial del vapor de agua) para varias rocas (Clark, 1980).

10
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
PERFILES DE PSEUDO-VELOCIDAD DE CIZALLA. En la práctica, el explorador puede no tener acceso a un perfil de velocidad de la onda S. Sin embargo, puede contar con un perfil sónico convencional de una calidad aceptable. Luego, él debería realizar una “mejor aproximación” de la velocidad de la onda S. Dados un perfil sónico y un análisis volumétrico confiables, puede ser posible estimar la velocidad de la onda S con una precisión de alrededor del 5 por ciento (Greenberg y Castagna, 1992). La posibilidad de predecir la velocidad de la onda S surge de: (1) las curvas de tendencia “global” de Vp-Vs para diferentes litologías* (Pickett, 1963; Castagna et al., 1985; Castagna et al., 1993), (2) la aplicación de las ecuaciones de Biot-Gassmann a rocas reales, y (3) el hecho de que las propiedades mecánicas son similares para los minerales formadores de rocas sedimentarias, lo que permite suposiciones de primer orden acerca de las leyes de mezcla en rocas formadas por varios minerales. Se discute el caso de rocas saturadas con agua en un 100 por ciento con la comprensión de que rocas parcialmente saturadas pueden ser tratadas de la misma manera con una aplicación directa de las ecuaciones de Gassmann* (Gassmann, 1951). Comenzamos con las curvas de tendencia de Vp-Vs para litologías puras. Estas son similares a aquellas publicadas en Castagna et al. (1993)1 y pueden ser expresadas como polinomios (u otros ajustes empíricos): Vsi = ai Vp
2 + bi Vp + ci (3) donde Vp es la velocidad de la onda P medida, Vsi es la velocidad de la onda S predicha para la litología i, y los coeficientes ai, bi, y ci son “globales” para cada litología. Considerando únicamente rocas bien consolidadas, se puede realizar una aproximación al primer orden. Sin embargo, a medida que los perfiles de velocidad de la onda S son menos comunes en sedimentos mal consolidados con baja velocidad, los tres coeficientes podrían ser necesarios para manejar correctamente las velocidades bajas. Para una roca compuesta por un solo mineral, la velocidad de la onda S está dada por la ecuación (3) sin necesidad de tener información acerca de las relaciones de la porosidad, esfuerzo efectivo, o velocidad versus profundidad. Para una litología mezclada, sin embargo, debe suponerse alguna expresión para la ley de mezcla. Por ejemplo, una ley de mezcla lineal en cuanto a la velocidad sería: n Vsm = ∑ Xi Vsi (4) i=1
donde n = numero de litologías porosas, Xi = fracción de volumen de la litología i, Vsi = velocidad de la onda S de la litología i, y Vsm= velocidad de la onda S para la litología mezclada, 1 Castagna, J.P., Batzle, M.L., y Kan, T.K., 1993, Rock Physics: The link between rock properties and amplitude variation with offset response.

11
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
con n ∑ Xi = 1 i=1
La ecuación (3) es utilizada para generar velocidades de onda S ficticias para los miembros finales. Estas son combinadas usando la ecuación (4), lo que da la velocidad de la onda S predicha para el compuesto. La Figura 10 muestra una comparación entre perfiles sónicos de “full waveform” para la velocidad de onda S. Se encontró que las velocidades de la onda S pueden ser predichas con una precisión de alrededor del 5 por ciento siempre que: (1) los datos originales del perfil sean de una alta calidad, (2) el análisis volumétrico sea correcto, y (3) la saturación con fluido sea conocida y corregida en forma apropiada. Desafortunadamente, estas tres suposiciones suelen no ser válidas. Por eso, se desea trabajar con mediciones directas siempre que sea posible.
Figura 10: Verificación de campo del cálculo de la velocidad de pseudo-cizalla en una litología mezclada.
PERFILES SÓNICOS DE “FULL WAVEFORM”. Las señales provenientes de perfiles sónicos convencionales contienen información acerca de la velocidad de la onda S. Los registros digitales de la forma de onda sónica completa comenzaron a estar disponibles en la década del 70 y una cantidad considerable de bibliografía ha sido publicada (por ejemplo Chang y Toksoz, 1981; White y Tongtaow, 1981; Siegfried y Castagna, 1982; Paillet y White, 1982; Tubman et al., 1984; Williams et al., 1984; entre otros). Para el rango de frecuencias donde se realizan los perfiles acústicos los varios modos de propagación a lo largo de la perforación tienen longitudes de onda del mismo

12
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
orden de magnitud que su diámetro. Como consecuencia, la forma dominante de propagación de ondas es la de ondas guiadas. La Figura 11 muestra formas de ondas sónicas en función del aumento del offset fuente-receptor en una formación “dura” (definida como una formación donde la velocidad de la onda S es mayor que la velocidad en el fluido de la perforación). El primer arribo corresponde a la onda compresional, seguida por más energía compresional (que a frecuencias altas puede ser considerada como un eco de la perforación). En teoría, esto debería ser seguido por una onda de cizalla. Sin embargo, ésta puede ser relativamente débil y ser inseparable de la onda de pseudo-Rayleigh siguiente. Nos referimos a la onda de pseudo-Rayleigh como la onda S, ya que sus primeros arribos viajan a, o cerca de, la velocidad de esta última. La onda de pseudo-Rayleigh es altamente dispersiva y tiene una frecuencia de corte baja. Su velocidad de fase está limitada, desde arriba, por la velocidad de la onda S de la formación y, desde abajo, por la velocidad del fluido de la perforación (Figura 12). También aparecen modos de mayor orden, pero sólo uno o dos modos de pseudo-Rayleigh son significantes para las frecuencias y geometrías de perforaciones típicas. La onda Stoneley es una onda de interfase que viaja a lo largo de la pared de la perforación. Como se muestra en la Figura 12, la onda es dispersiva con velocidades de fase y grupo ligeramente menores que la velocidad en el fluido de la perforación en formaciones “duras”. El hecho de que un perfil de onda S con perfiles sónicos “full waveform” sea exitoso depende de la relación entre la velocidad de la onda S en la formación y la velocidad en el fluido de la perforación (la velocidad de una onda P en un medio fluido infinito).
Figura 11: Datos de un perfil sónico convencional de “full waveform”. El espaciamiento entre receptores es de 0.15 m. P = onda P, S = onda S, st = onda Stoneley.
Figura 12: Curvas de dispersión para datos sónicos convencionales de “full waveform” en una formación “dura”. Las velocidades están normalizadas por la velocidad en el fluido. Se muestran los dos primeros modos de la onda de pseudo-Rayleigh (de Cheng y Toksoz, 1981).

13
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Caso 1: Vs >> Vf (Formaciones “duras” tales como calizas, dolomitas, y areniscas compactas; ver Figura 13).
Las velocidades de la onda S son obtenidas a partir de las velocidades de la onda de pseudo-Rayleigh. Las ondas P son débiles en comparación con estas ondas, y debido a la alta relación señal-ruido (S/R) correspondiente, pueden obtenerse excelentes resultados usando herramientas convencionales con un espaciamiento corto o largo. Exceptuando intervalos fallados, erosionados o saturados con gas, los tiempos de viaje de la onda S deberían tener una precisión mejor que 4 µs/pie (13 µs/m) siempre que las formas de onda hayan sido procesadas cuidadosamente. Caso 2: Vs > Vf (Formaciones “medias-duras” tales como areniscas porosas consolidadas y algunas pizarras; ver Figura 14).
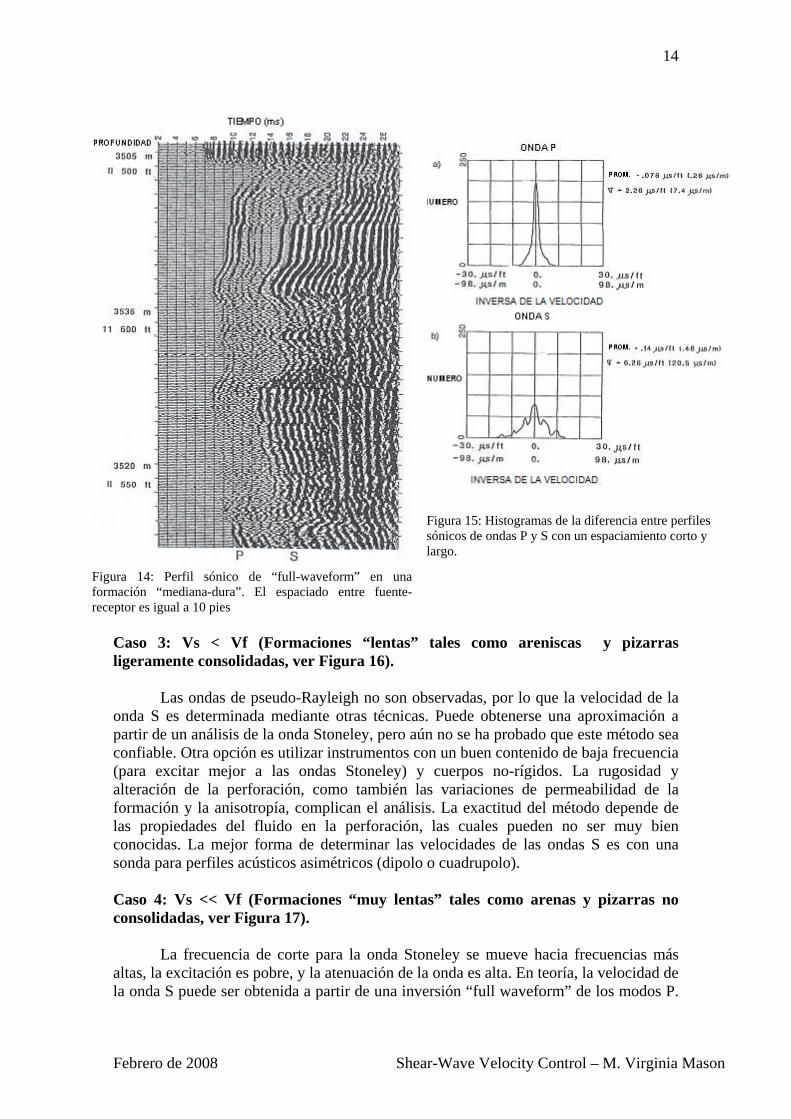
Las velocidades de la onda S son obtenidas a partir de las velocidades de la onda de pseudo-Rayleigh. Sin embargo, a diferencia del Caso 1, la energía compresional que llega más tarde es más fuerte y las ondas de pseudo-Rayleigh son más débiles. El ruido generado por la fuente resulta en una relación S/R pobre para la onda S. La Figura 15 muestra histogramas de la diferencia entre tiempos de viaje obtenidos sobre el mismo intervalo usando herramientas con un espaciamiento corto y largo en una secuencia de arena-pizarra a profundidades de entre 16100 pies (4907 m) y 16460 pies (5017 m). Errores debidos a cambios de la profundidad y al estiramiento del cable fueron corregidos previamente. La repetitividad del tiempo de viaje de la onda P es de alrededor de 2 µs/pie (6.6 µs/m), mientras que para la onda S es de alrededor de 6 µs/pie (19.7 µs/m). Este es un escenario que muestra el “mejor caso” ya que la relación S/R fue incrementada en una forma significante mediante un filtrado y las velocidades fueron elegidas cuidadosamente.
Figura 13: Perfil sónico de “full waveform” en una formación “dura”. El espaciamiento entre fuente-receptor es de 10 pies. En esta banda de frecuencia la fase de Airy de la onda pseudo-Rayleigh es más prominente que la onda Stoneley.
14
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 14: Perfil sónico de “full-waveform” en una formación “mediana-dura”. El espaciado entre fuente-receptor es igual a 10 pies
Figura 15: Histogramas de la diferencia entre perfiles sónicos de ondas P y S con un espaciamiento corto y largo.
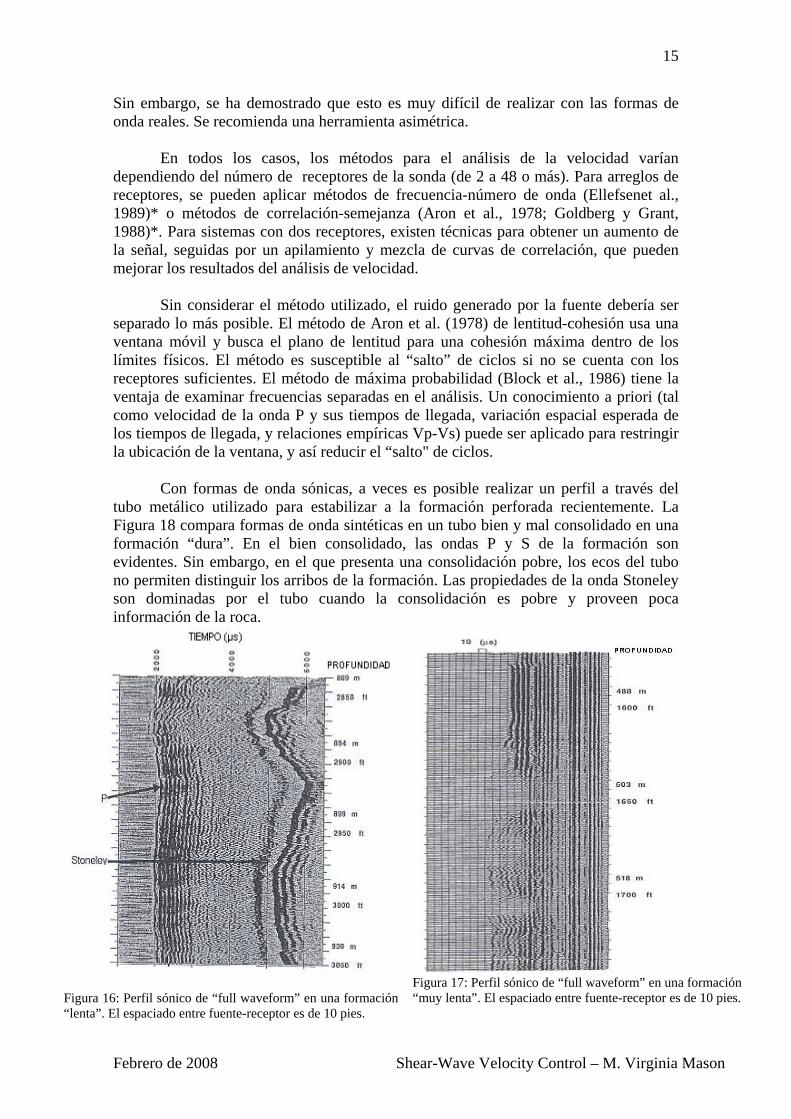
Caso 3: Vs < Vf (Formaciones “lentas” tales como areniscas y pizarras ligeramente consolidadas, ver Figura 16). Las ondas de pseudo-Rayleigh no son observadas, por lo que la velocidad de la onda S es determinada mediante otras técnicas. Puede obtenerse una aproximación a partir de un análisis de la onda Stoneley, pero aún no se ha probado que este método sea confiable. Otra opción es utilizar instrumentos con un buen contenido de baja frecuencia (para excitar mejor a las ondas Stoneley) y cuerpos no-rígidos. La rugosidad y alteración de la perforación, como también las variaciones de permeabilidad de la formación y la anisotropía, complican el análisis. La exactitud del método depende de las propiedades del fluido en la perforación, las cuales pueden no ser muy bien conocidas. La mejor forma de determinar las velocidades de las ondas S es con una sonda para perfiles acústicos asimétricos (dipolo o cuadrupolo). Caso 4: Vs << Vf (Formaciones “muy lentas” tales como arenas y pizarras no consolidadas, ver Figura 17).
La frecuencia de corte para la onda Stoneley se mueve hacia frecuencias más altas, la excitación es pobre, y la atenuación de la onda es alta. En teoría, la velocidad de la onda S puede ser obtenida a partir de una inversión “full waveform” de los modos P.
15
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Sin embargo, se ha demostrado que esto es muy difícil de realizar con las formas de onda reales. Se recomienda una herramienta asimétrica.
En todos los casos, los métodos para el análisis de la velocidad varían dependiendo del número de receptores de la sonda (de 2 a 48 o más). Para arreglos de receptores, se pueden aplicar métodos de frecuencia-número de onda (Ellefsenet al., 1989)* o métodos de correlación-semejanza (Aron et al., 1978; Goldberg y Grant, 1988)*. Para sistemas con dos receptores, existen técnicas para obtener un aumento de la señal, seguidas por un apilamiento y mezcla de curvas de correlación, que pueden mejorar los resultados del análisis de velocidad.
Sin considerar el método utilizado, el ruido generado por la fuente debería ser separado lo más posible. El método de Aron et al. (1978) de lentitud-cohesión usa una ventana móvil y busca el plano de lentitud para una cohesión máxima dentro de los límites físicos. El método es susceptible al “salto” de ciclos si no se cuenta con los receptores suficientes. El método de máxima probabilidad (Block et al., 1986) tiene la ventaja de examinar frecuencias separadas en el análisis. Un conocimiento a priori (tal como velocidad de la onda P y sus tiempos de llegada, variación espacial esperada de los tiempos de llegada, y relaciones empíricas Vp-Vs) puede ser aplicado para restringir la ubicación de la ventana, y así reducir el “salto" de ciclos.
Con formas de onda sónicas, a veces es posible realizar un perfil a través del tubo metálico utilizado para estabilizar a la formación perforada recientemente. La Figura 18 compara formas de onda sintéticas en un tubo bien y mal consolidado en una formación “dura”. En el bien consolidado, las ondas P y S de la formación son evidentes. Sin embargo, en el que presenta una consolidación pobre, los ecos del tubo no permiten distinguir los arribos de la formación. Las propiedades de la onda Stoneley son dominadas por el tubo cuando la consolidación es pobre y proveen poca información de la roca.
Figura 16: Perfil sónico de “full waveform” en una formación “lenta”. El espaciado entre fuente-receptor es de 10 pies.
Figura 17: Perfil sónico de “full waveform” en una formación “muy lenta”. El espaciado entre fuente-receptor es de 10 pies.

16
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 18 (a): Datos sónicos sintéticos de “full waveform” en una perforación bien consolidada. Los parámetros del modelo están dados en función del radio exterior (R) desde el centro de la perforación.
Figura 18(b): Datos sónicos sintéticos de “full-waveform” en una perforación mal consolidada. Los parámetros del modelo están dados en función del radio exterior (R) desde el centro de la perforación.
FORMAS DE ONDA SONICA DE VARIOS POLOS. La mejor forma de determinar la velocidad de la onda S cuando su valor en la formación es menor o igual que la velocidad en el fluido de la perforación es con dispositivos para perfiles sónicos de multipolos. Fuentes con una asimetría axial (multipolos) provocan excitaciones asimétricas que generan modos tales como las ondas denominadas “flexural waves” (dipolo) y “screw waves” (cuadripolo). La velocidad de la onda S de la formación puede ser determinada a partir de las velocidades de tales modos asimétricos de propagación.
White (1967) propuso el uso de fuentes asimétricas junto con el perfil “hula”, denominado así por el movimiento análogo entre una bailarina de hula y el modo “flexural” de la perforación. La herramienta es un dispositivo de contacto directo, que no permite realizar un perfil continuo de velocidad. Kitzunezaki (1980) desarrolló una sonda dipolar excitada por un solenoide dipolar y con geófonos horizontales de impedancia como receptores. Este dispositivo es práctico para propósitos de ingeniería civil en perforaciones poco profundas. Sin embargo, existen ciertas consideraciones acerca de la relación S/R que impiden que pueda realizarse un perfilaje continuo.
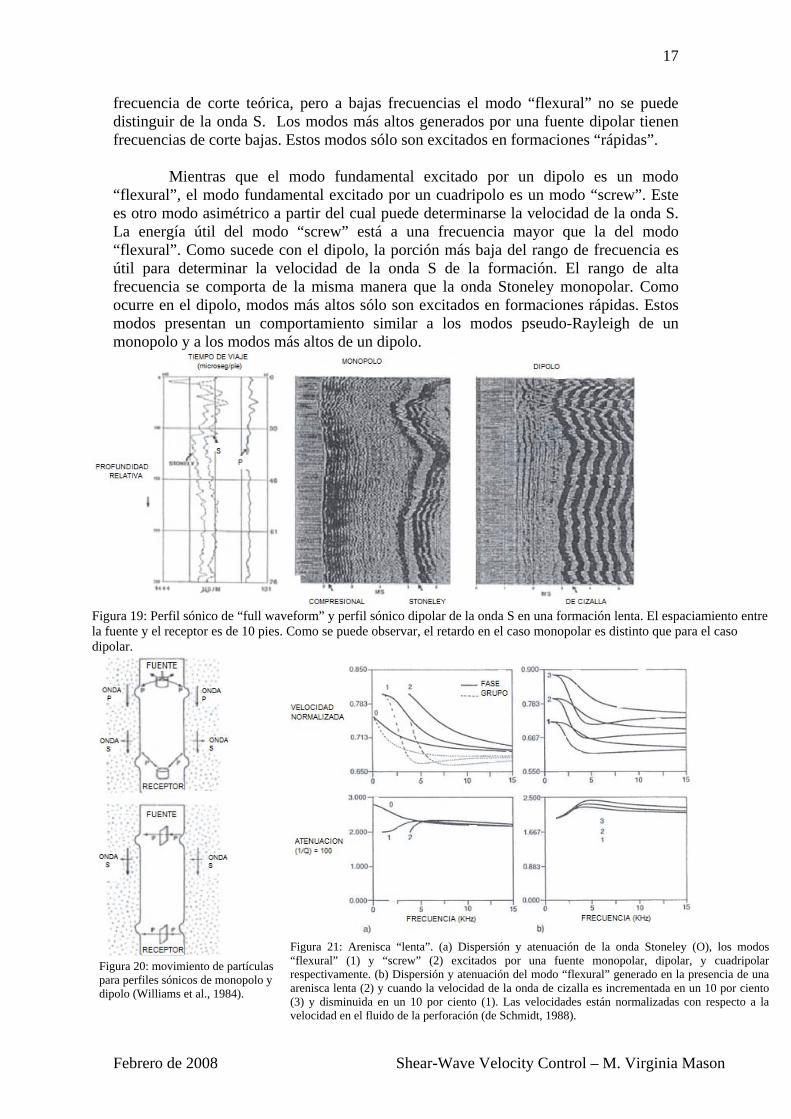
Williams et al. (1984) presentó la primer herramienta dipolar práctica para aplicaciones en la industria petrolera. La Figura 19 (Katahara, 1989, datos no publicados) compara formas de onda adquiridas con una sonda monopolar y una dipolar en una formación “lenta”.
Una fuente dipolar excita a un modo “flexural” en la perforación (ver Figura 20). La velocidad de este modo depende fuertemente de la velocidad de la onda S de la formación. Es un modo dispersivo (Figura 21) para el cual la porción de baja frecuencia es la más sensible a la velocidad de la onda S de la formación. El límite de alta frecuencia actúa como la onda Stoneley de una fuente monopolar. No hay una
17
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
frecuencia de corte teórica, pero a bajas frecuencias el modo “flexural” no se puede distinguir de la onda S. Los modos más altos generados por una fuente dipolar tienen frecuencias de corte bajas. Estos modos sólo son excitados en formaciones “rápidas”. Mientras que el modo fundamental excitado por un dipolo es un modo “flexural”, el modo fundamental excitado por un cuadripolo es un modo “screw”. Este es otro modo asimétrico a partir del cual puede determinarse la velocidad de la onda S. La energía útil del modo “screw” está a una frecuencia mayor que la del modo “flexural”. Como sucede con el dipolo, la porción más baja del rango de frecuencia es útil para determinar la velocidad de la onda S de la formación. El rango de alta frecuencia se comporta de la misma manera que la onda Stoneley monopolar. Como ocurre en el dipolo, modos más altos sólo son excitados en formaciones rápidas. Estos modos presentan un comportamiento similar a los modos pseudo-Rayleigh de un monopolo y a los modos más altos de un dipolo.
Figura 19: Perfil sónico de “full waveform” y perfil sónico dipolar de la onda S en una formación lenta. El espaciamiento entre la fuente y el receptor es de 10 pies. Como se puede observar, el retardo en el caso monopolar es distinto que para el caso dipolar.
Figura 20: movimiento de partículas para perfiles sónicos de monopolo y dipolo (Williams et al., 1984).
Figura 21: Arenisca “lenta”. (a) Dispersión y atenuación de la onda Stoneley (O), los modos “flexural” (1) y “screw” (2) excitados por una fuente monopolar, dipolar, y cuadripolar respectivamente. (b) Dispersión y atenuación del modo “flexural” generado en la presencia de una arenisca lenta (2) y cuando la velocidad de la onda de cizalla es incrementada en un 10 por ciento (3) y disminuida en un 10 por ciento (1). Las velocidades están normalizadas con respecto a la velocidad en el fluido de la perforación (de Schmidt, 1988).

18
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
PERFILES SISMICOS VERTICALES. Las propiedades elementales del campo de las ondas utilizadas para medir la velocidad a partir de un perfil sísmico vertical (VSP) son el tiempo de viaje absoluto, diferencias entre tiempos de viaje, amplitudes del desplazamiento de ondas internas, y ondas de tubo en la perforación (ondas Stoneley de baja frecuencia). Otra propiedad importante para las ondas S es la dirección de polarización al tratarse de una propagación en medios anisótropos. Varias técnicas de inversión han sido desarrolladas para explotar una o más de estas propiedades. Los métodos de inversión del tiempo de viaje, por ejemplo, han sido aplicados a datos de VSP de ondas P y S. Los perfiles sísmicos verticales de onda S son adquiridos con una sonda de varias componentes y (1) una fuente de ondas S (generalmente un vibrador horizontal) u (2) ondas S convertidas a partir de una fuente de ondas P. Además, al igual que con las formas de onda sónicas en formaciones lentas, las velocidades de la onda S pueden ser calculadas a partir de las velocidades de las ondas de tubo.
Un aspecto importante en la determinación de las velocidades de la onda S es que se establezca un marco receptor consistente para separar las dos ondas S polarizadas. En un medio isótropo, esto puede ser realizado orientando la componente radial en la dirección de la onda P.
DiSiena et al. (1984) calculó velocidades de la onda S mediante una inversión iterativa de los tiempos de viaje de arribos directos para capas lateralmente homogéneas entre receptores. Se fue variando las velocidades de los intervalos hasta que los tiempos de viaje teóricos del “rayo” concuerden con los tiempos de viaje observados.
Stewart (1984) desarrolló una técnica de mínimos cuadrados del tipo Levenberg-Marquardt para invertir los tiempos de viaje del VSP. En un estudio de la sensibilidad de la velocidad, mostró que la precisión de las mediciones de velocidad del VSP es pobre para un espaciado corto entre receptores bajo 100 pies (30 m). La misma técnica fue aplicada para invertir tiempos de viaje de la onda S en un VSP de offset para delimitar una zona de falla inducida (Stewart et al., 1984).
La Figura 22 compara velocidades de la onda S obtenidas mediante un perfil sónico de “full waveform” (herramienta de 12 canales) con aquellas obtenidas a partir de un VSP “near-offset” de onda S (adquirido con vibradores horizontales). Los tiempos de viaje del perfil sónico fueron promediados para ajustar el espaciamiento entre las estaciones del VSP. Se puede observar que las velocidades de los intervalos del perfil sónico tienen una menor varianza y son geológicamente más razonables que las velocidades de los intervalos del VSP.

19
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 22: Comparación entre velocidades de la onda S obtenidas de un perfil sónico y de un VSP.
Se han desarrollado otros métodos de inversión del tiempo de viaje que puedan
aplicarse en principio a cualquier forma de onda. Usando una inversión iterativa de mínimos cuadrados en una técnica “layer stripping”, Lines et al. (1984) obtuvo las velocidades e inclinación local en la vecindad de una perforación a partir de los tiempos del arribo directo y de la primera reflexión. Pujol et al. (1985) extendió el algoritmo de Levenberg-Marquardt para estimar simultáneamente la velocidad y los parámetros del rayo. Esta formulación está basada en una expansión en series de Taylor de los tiempos de viaje y de las distancias horizontales entre fuente-receptor como funciones de la velocidad y del parámetro del rayo en un medio lateralmente homogéneo. Ahmed (1987) mostró que los tiempos de viaje de ondas S convertidas pueden ser utilizados para determinar la velocidad de la onda S.
Usando dos pozos cercanos y fuentes múltiples compresional (P), de cizalla polarizada verticalmente (SV), y de cizalla polarizada horizontalmente (SH), White et al. (1983) determinó velocidades de fase (en un medio isótropo transversalmente) para ondas P y S en la pizarra Pierre. Empleó una técnica de mínimos cuadrados para resolver una forma linealizada de la relación de dispersión. Gaiser (1992) adaptó esta aproximación para una perforación usando VSPs de offset múltiple con el fin de obtener valores independientes de lentitudes vertical y horizontal para una velocidad de fase compensadora. La Figura 23 muestra el resultado de 6 perfiles sísmicos verticales de onda P. Se realizaron aproximaciones de mínimos cuadrados para las velocidades de las ondas P vertical y horizontal, y para la velocidad de la onda S polarizada verticalmente con ángulos de incidencia vertical y de 45 grados. Se utilizó un VSP de “near-offset” de onda SH para restringir las velocidades de la onda S vertical. Hay una buena correlación entre la anisotropía para la velocidad aparente y las diferentes litologías. La anisotropía toma su menor valor en las areniscas y es mayor en la marga.

20
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
En formaciones “lentas”, Biot (1952) y White (1965) han demostrado que la velocidad de la onda S puede ser obtenida a partir de la velocidad de la onda de tubo para una frecuencia igual a cero mediante: Vs = Vf VT [ρf / (ρ (Vf
2 – VT2)]-1/2 (5)
donde Vf = velocidad en el fluido de la perforación, VT = velocidad de la onda de tubo, Vs = velocidad de la onda S en la formación, ρf = densidad del fluido en la perforación, y ρ = densidad de bulk de la formación. La Figura 24 muestra la relación entre la velocidad de la onda de tubo para una frecuencia igual a cero y la velocidad de la onda S en la formación.
Figura 23: Anisotropía compresional (P) y de cizalla (SV) medida en un pozo poco profundo. Figura 24: Velocidad de la onda S en función de la velocidad de la onda de tubo.

21
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 25: Perfil sísmico vertical en la Costa del Golfo con componentes horizontales rotadas.
Figura 26: Lentitud de la onda P calculada a partir de un VSP y de un perfil; y lentitud de la onda S predicha y obtenida a partir de un VSP. Por encima de los 960 m la lentitud de la onda S es predicha tanto para arenas totalmente saturadas con salmuera (línea sólida) y para arenas saturadas parcialmente con gas (línea punteada).
Figura 27: Comparación entre la lentitud de la onda S estimada suponiendo que la onda que viaja más lentamente es una onda de tubo (triángulos) y la lentitud de la onda S predicha a partir de información litológica. El gráfico sugiere que la onda lenta no es una onda de tubo.
Ejemplo 1 – Rocas clásticas de la Costa del Golfo de Texas.
El ejemplo 1 compara velocidades de la onda S a partir de un VSP obtenido con un cañón de aire de “near-offset” (que aparentemente genera ondas S fuertes sobre o cerca de la superficie) con las velocidades esperadas cuando se suponen rocas saturadas con salmuera- o con gas.
El VSP fue obtenido con una herramienta de geófonos de tres componentes y
con un sistema de circuitos digitalizadores. La fuente fue un cañón de aire de 200 pulgadas cúbicas (3279 cc) cargada a 2000 PSI (138 bares) y suspendida en un pozo con agua hasta una profundidad de 250 pies (76.2 m). Las dimensiones del pozo eran de 15 pies (4.57 m) cuadrados en superficie, 10 pies (3.05 m) cuadrados en el fondo, y de 10

22
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
pies (3.05 m) a 12 pies (3.66 m) de profundidad. El VSP fue llevado a cabo en un pozo abierto desde 1000 pies (305 m) hasta 5000 pies (1524 m) donde las mediciones de profundidad fueron realizadas con incrementos de 50 pies (15.2 m). Para cada profundidad se obtuvieron de cinco a siete registros buenos.
Las trazas ruidosas fueron descartadas. Se aplicó un filtro pasabanda de 5-65 Hz
y se escogieron recíprocamente los tiempos para el canal vertical. Se efectuó una rotación del sistema de coordenadas en las componentes horizontales nivel por nivel usando el método de hodógrafas (Di Siena et al., 1981). La ventana del análisis fue de -10 ms a +45 ms alrededor de los tiempos de corte elegidos, produciendo proyecciones tangenciales y ortogonales. Las componentes tangencial y vertical fueron proyectadas para aislar la energía de la onda P del movimiento horizontal de las partículas en el plano de la fuente. La Figura 25 muestra los sismogramas resultantes de la componente horizontal. Los tiempos de corte para la onda de cizalla fueron escogidos sobre una fase constante y suavizados sobre cinco niveles (200 pies o 61 m). La identificación de la onda S en la Figura 25 es ambigua. Un modelado elástico indica que no se esperan ondas S convertidas en el offset cercano de este experimento. Por otro lado, el evento “de cizalla” principal no se refleja fuertemente desde el fondo de la perforación como se hubiese esperado para una onda de tubo. Sin embargo, como se mostrará más adelante, las velocidades de la onda S son consistentes con las esperadas.
La Figura 26 compara la lentitud del intervalo del VSP (tiempo de viaje) con un
perfil sónico convencional de onda P suavizado y con tiempos de viaje de la onda S calculados usando curvas de tendencia. El análisis volumétrico de Schlumberger (VOLAN) indica la presencia de arenas y pizarras saturadas principalmente con salmuera. Con esta información y con el perfil sónico convencional, se calculó un perfil del tiempo de viaje de la onda S. Por debajo de los 3150 pies (960 m) el VSP y los tiempos de viaje estimados para la onda S concuerdan. Sin embargo, por encima de los 3150 pies (960 m) los tiempos de viaje de la onda S del VSP son más rápidos que los predichos. Por eso, los cocientes Vp/Vs observados son menores que los esperados para rocas saturadas con salmuera. Estos valores de Vp/Vs tan bajos pueden deberse a cantidades menores de gas. Esta hipótesis fue probada suponiendo una saturación con gas del 10 por ciento en todas las arenas por encima de los 3150 pies (960 m) y calculando nuevos valores de lentitud para la onda S. En la Figura 26, esto resulta en una curva que se superpone a los tiempos de viaje observados para la onda S.
Para verificar la identificación de la onda S, se mantuvo la hipótesis de que el
evento en cuestión era una onda de tubo. Suponiendo que la lentitud de la onda de tubo fue medida, se calcularon las velocidades correspondientes de la onda S usando la Ecuación 5. El resultado (Figura 27) es que los tiempos de viaje de la onda S calculados no concuerdan con nuestras expectativas. Por lo tanto, la hipótesis de la onda de tubo es menos satisfactoria que la suposición de que la lentitud de la onda S haya sido medida directamente con el VSP.
En conclusión, una interpretación integrada del VSP e información de perfiles
indica una saturación con gas baja en las arenas por encima de los 3150 pies (960 m) y una saturación con agua del 100 por ciento por debajo de esta profundidad. Esta información no estaba dentro de la confiabilidad del análisis de un perfil de pozo convencional. Las sugerencias para un análisis de AVO en las inmediaciones son (1) arenas por encima de los 3150 pies (960 m) pueden exhibir respuestas AVO “falsas”

23
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
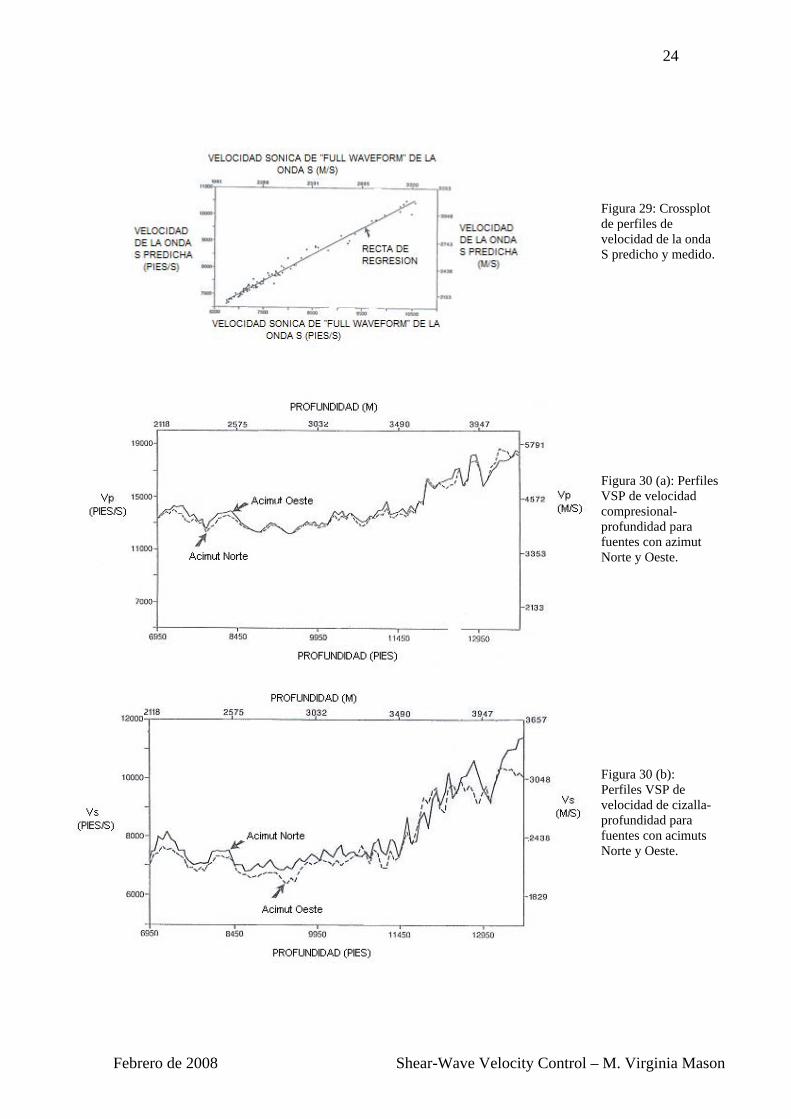
aunque contengan o no hidrocarburos comerciales, y (2) las arenas poco profundas, con presencia de gas, pueden confundir la respuesta de AVO para horizontes más profundos. Ejemplo 2 – Pizarras Devónicas. Este ejemplo compara un VSP de onda S adquirido con vibradores horizontales para dos azimuts diferentes, un perfil sónico de “full-waveform” convencional, y un perfil de velocidad de pseudo-cizalla en pizarras Devónicas duras y fracturadas. El VSP fue adquirido con vibradores verticales y horizontales (inline y crossline) ubicados a 2000 pies al norte y al oeste de la fuente. Las componentes horizontales fueron orientadas de tal forma de maximizar el movimiento de las partículas de la onda P. Las velocidades de los intervalos fueron determinadas a partir del tiempo de viaje de las componentes principales. Todos los retardos del VSP y de los perfiles de pozo fueron promediados sobre un tramo de 200 pies. Se utilizó un análisis de la litología del perfil del pozo para construir un perfil de velocidad de pseudo-cizalla. Esta predicción concuerda con el perfil sónico de “full-waveform” (ver Figuras 28 y 29). El error estándar es de 122 pies/s (37.2 m/s). Las velocidades del VSP suavizadas (5 estaciones) concuerdan para los dos acimuts, a pesar de que es evidente que existe alguna anisotropía acimutal (Figuras 30 y 31). Los errores estándar son de 273 pies/s (83.2 m/s) para ondas P y de 346 pies/s (105.4 m/s) para ondas S. Cuando se compara el VSP con la velocidad sónica de “full-waveform” de la onda S (Figuras 32 y 33), el error estándar es alto (921 pies/s o 280.7 m/s). En conclusión, las velocidades de la onda S de full-waveform y del VSP concuerdan con las velocidades esperadas. Las velocidades de “full-waveform” de la onda S son altamente confiables (del orden de 100 pies/s o 30.5 m/s si se supone que las velocidades predichas son correctas) al ser suavizadas con un operador (400 muestras) de 200 pies (61 m). Probablemente, el error aleatorio ha sido eliminado con este suavizado. Las mediciones para los diferentes acimuts concuerdan mejor entre sí con el VSP que con los resultados suavizados del perfil sónico de “full waveform”. Esto puede deberse a los errores de elección en el VSP causados por la interferencia de arribos tempranos. La anisotropía azimutal aparente podría deberse a fracturas.
Figura 28: Comparación entre perfiles de velocidad de onda S predichos y medidos en un intervalo Paleozoico.
24
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 29: Crossplot de perfiles de velocidad de la onda S predicho y medido. Figura 30 (a): Perfiles VSP de velocidad compresional-profundidad para fuentes con azimut Norte y Oeste. Figura 30 (b): Perfiles VSP de velocidad de cizalla-profundidad para fuentes con acimuts Norte y Oeste.

25
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
Figura 31 (a): Crossplot de velocidades de la onda P para azimuts Norte y Oeste. Figura 31 (b): Crossplot de velocidades de la onda S para azimuts Norte y Oeste.
Figura 32 (a): Perfiles de velocidad-profundidad sónicos de “full waveform” y VSP de azimut oeste.
Figura 32 (b): Perfiles de velocidad-profundidad sónicos de “full waveform” y VSP de azimut norte.
Figura 33: Crossplot de velocidades de la onda S a partir de un VSP y de un perfil sónico de “full waveform”.

26
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
DISCUSION Y CONCLUSIONES. El hecho de obtener información de la onda S a partir de perforaciones incluye la interpretación integrada de mediciones de laboratorio, perfiles de pseudo-velocidad, perfiles sónicos convencionales de full-waveform, perfiles de dipolos o cuadripolos, y perfiles sísmicos verticales de varios tipos. Cada método tiene sus ventajas y sus limitaciones. Las mediciones de laboratorio son realizadas sobre una representación imparcial de lo que está por debajo de la superficie. Los tamaños de la muestra y las longitudes de onda de la señal son una fracción de minuto de las longitudes de onda sísmicas, por lo que los resultados suelen no ser representativos. Sin embargo, en el laboratorio es posible controlar las condiciones ambientales, estudiar las sistemáticas de las variaciones de velocidad, y medir la anisotropía intrínseca directamente. Las mediciones del perfil de pozo están sujetas a errores de procesamiento y a los efectos perturbadores de la perforación. Si el procesamiento fue realizado correctamente, proveen una medición de las variaciones verticales de la velocidad bastante precisa y con una alta resolución. Sin embargo, la variación lateral de la velocidad es muestreada únicamente en la perforación y puede, como no, representar en forma adecuada las propiedades de la región debajo de la superficie promediadas sobre la zona de Fresnel de los datos sísmicos superficiales. Perfiles de pseudo-velocidad de cizalla obtenidos a partir de tendencias empíricas son un suplemento útil cuando no se cuenta con perfiles de onda S directa. Las mediciones del VSP son las más comparables en frecuencia y escala con los datos sísmicos superficiales. Sin embargo, las velocidades de los intervalos deben ser suavizadas para lograr la precisión necesaria para un modelado AVO, lo que limita la resolución del método. Para la determinación de la velocidad del intervalo, los VSP son los mejor utilizados como una forma de calibración de las velocidades del perfil de pozo.

27
Febrero de 2008 Shear-Wave Velocity Control – M. Virginia Mason
BIBLIOGRAFIA Castagna, J. P., Batzle, M. L., Kan, T. K., 1993; Rock Physics: The link between rock properties and amplitude variation with offset response; Offset-Dependent-Reflectivity: Soc. Expl. Geophys., 124-157. Ellefsen, K. J., Cheng, C. H., and Tubman, K. M., 1989; Estimating phase velocity and attenuation of guided waves in acoustic logging data: Geophysics, 54, 1054-1059. Gassmann, F., 1951; Elastic waves through a packing of spheres: Geophysics, 16, 673-685. Goldberg, D., and Grant, W. T.,1988; Shear-wave processing of sonic log waveforms in a limestone reservoir: Geophysics, 53, 668-676. King, M. S., and Fatt, I., 1962, Ultrasonic shear-wave velocities in rock subjected to simulated overburden pressure: Geophysics, 27, 590-598.